
Transferability of Airborne LiDAR Data for Canopy Fuel Mapping: Effect of Pulse Density and Model Formulation

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
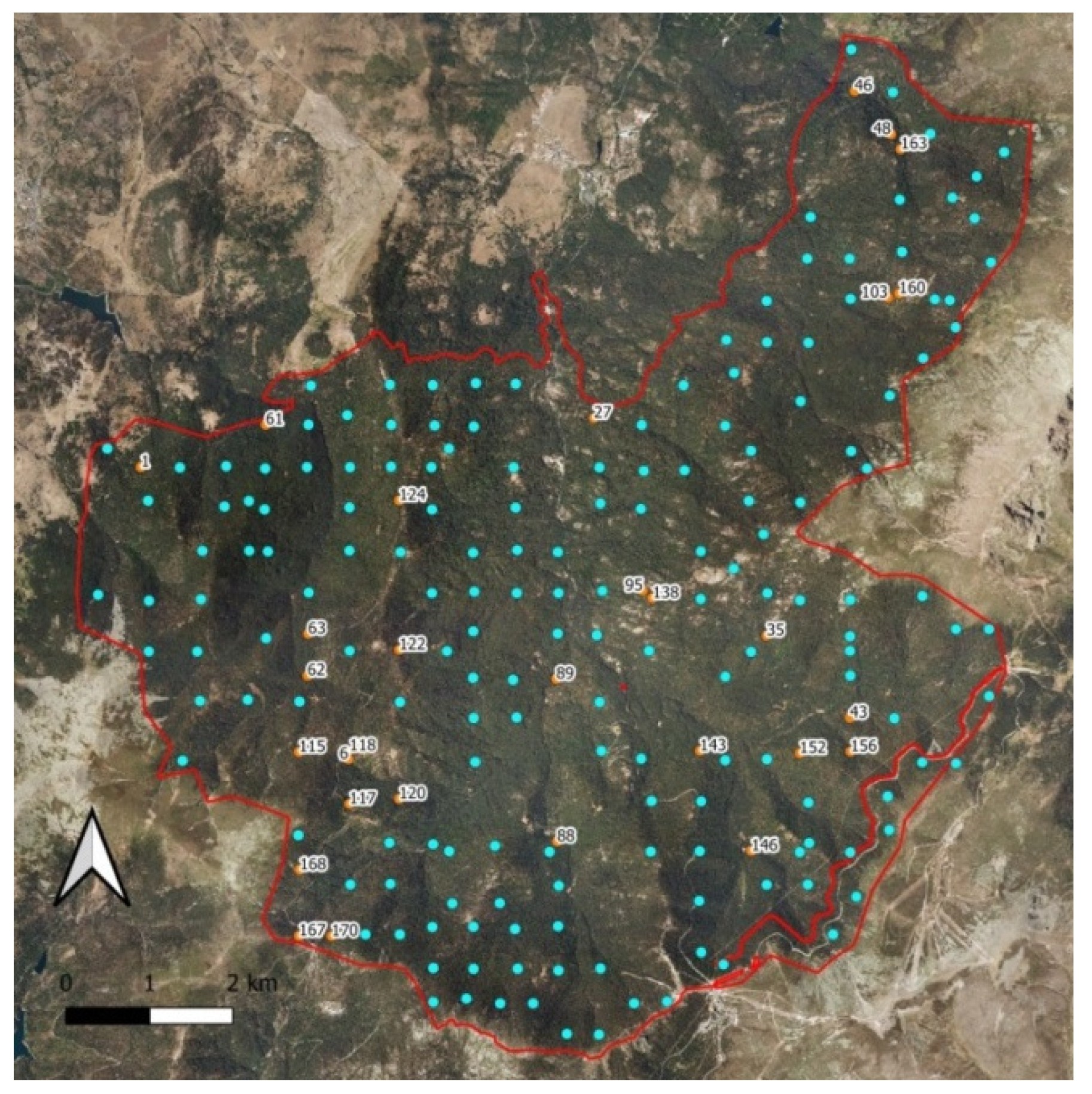
2.1. Study Area and Field Data
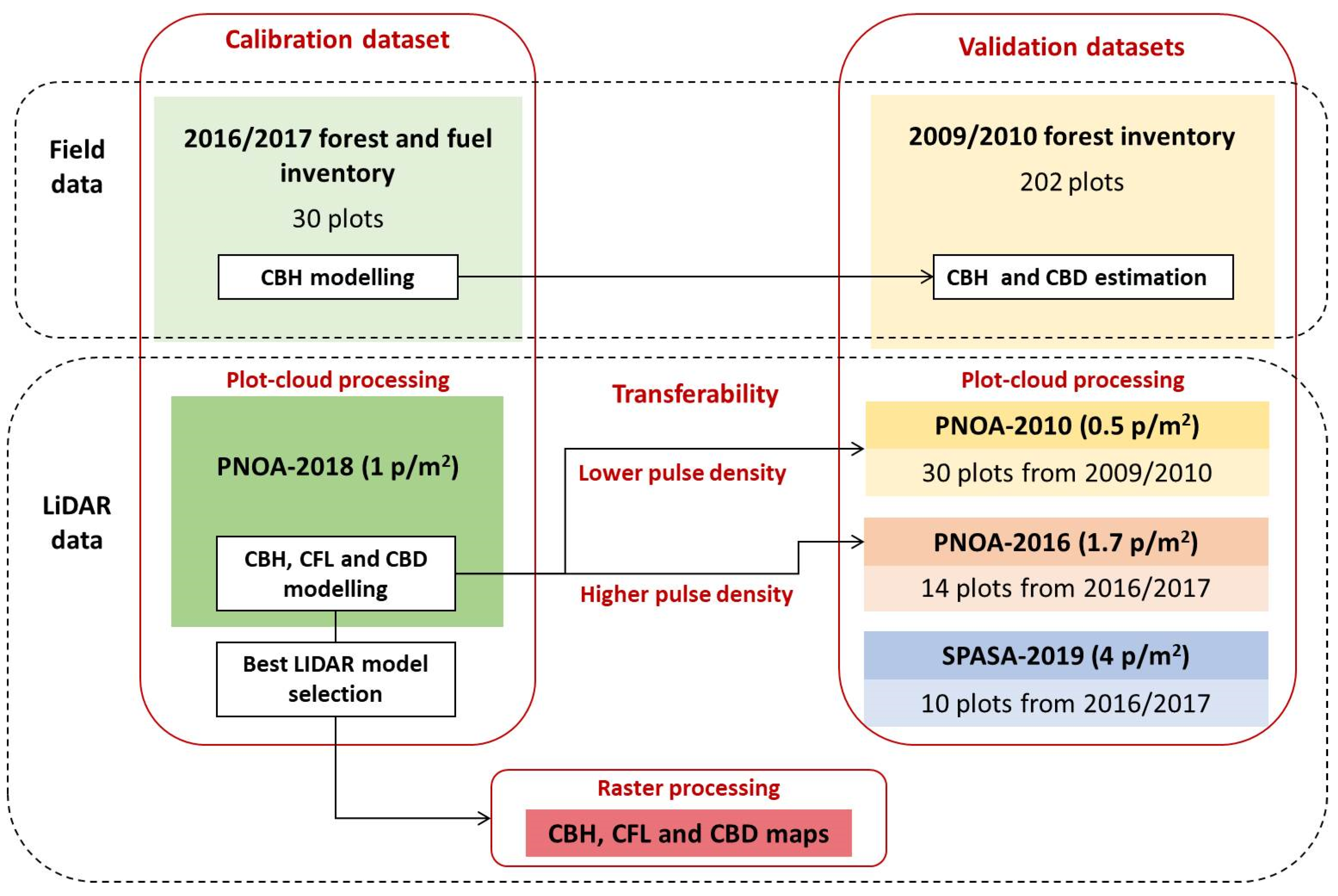
2.2. ALS Data
2.3. Statistical Analysis and Modelling
2.4. Transferibility Assessment and Canopy Fuel Mapping
3. Results
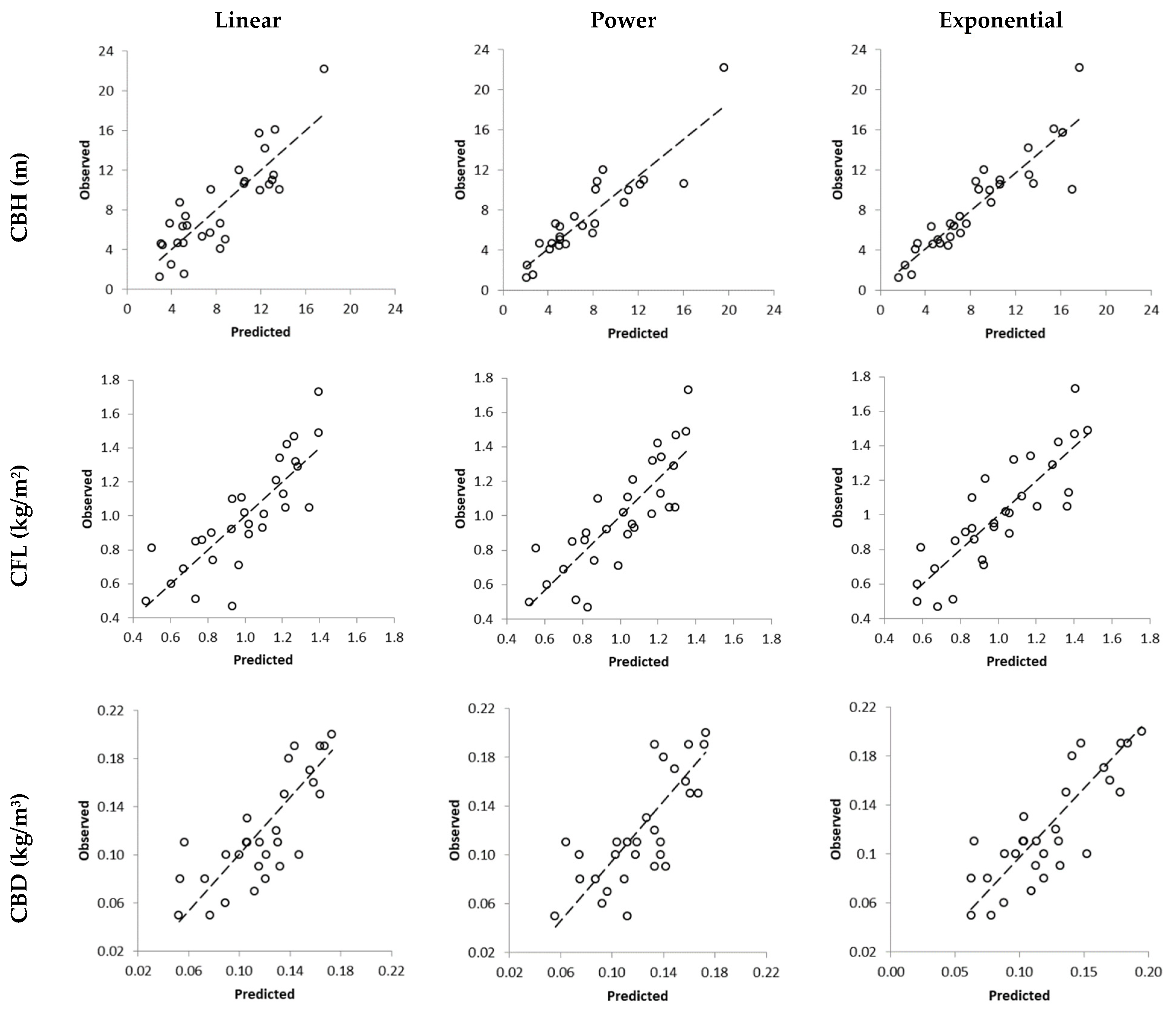
3.1. Canopy Fuel Modelling
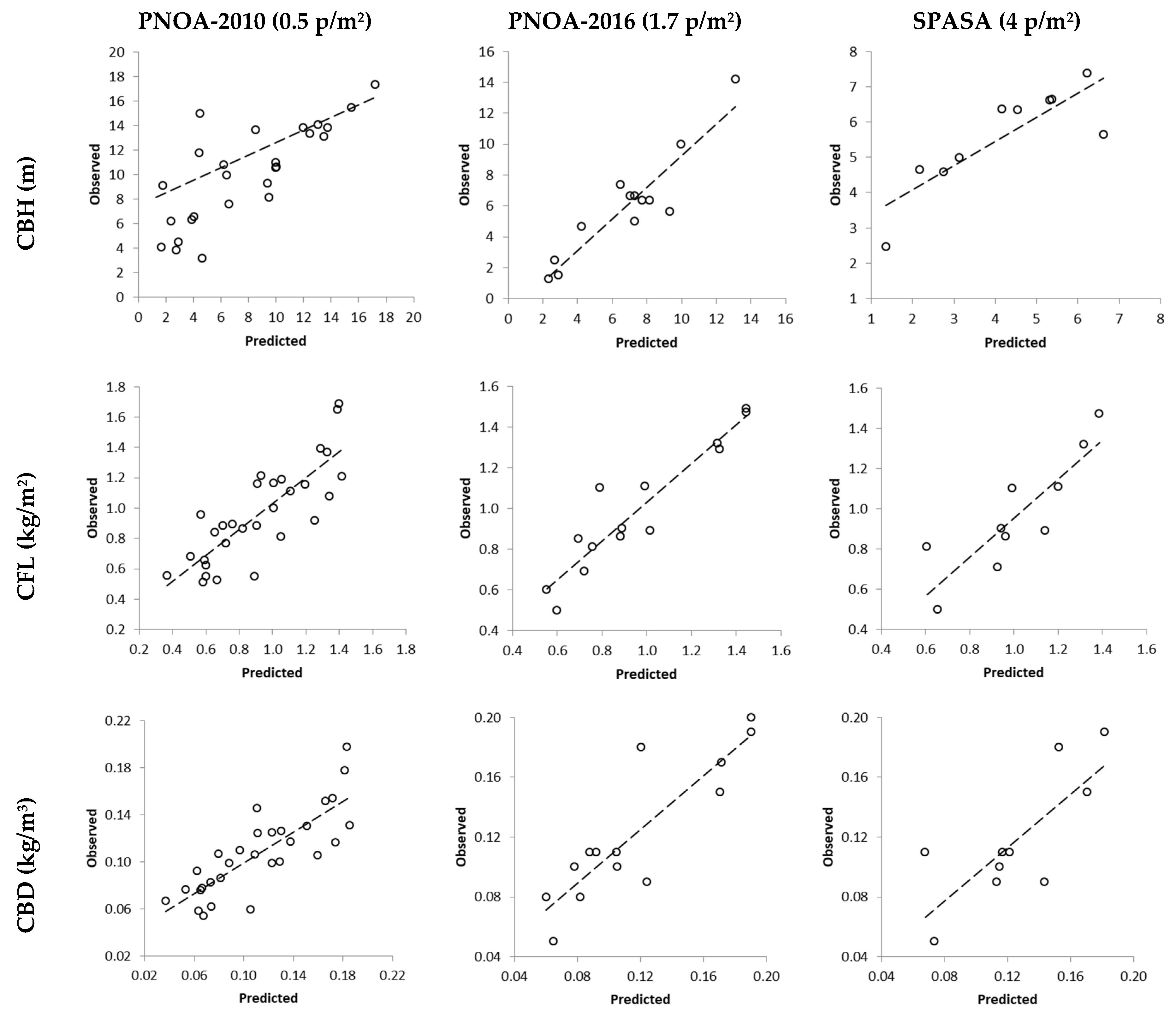
3.2. Transferability Assessment
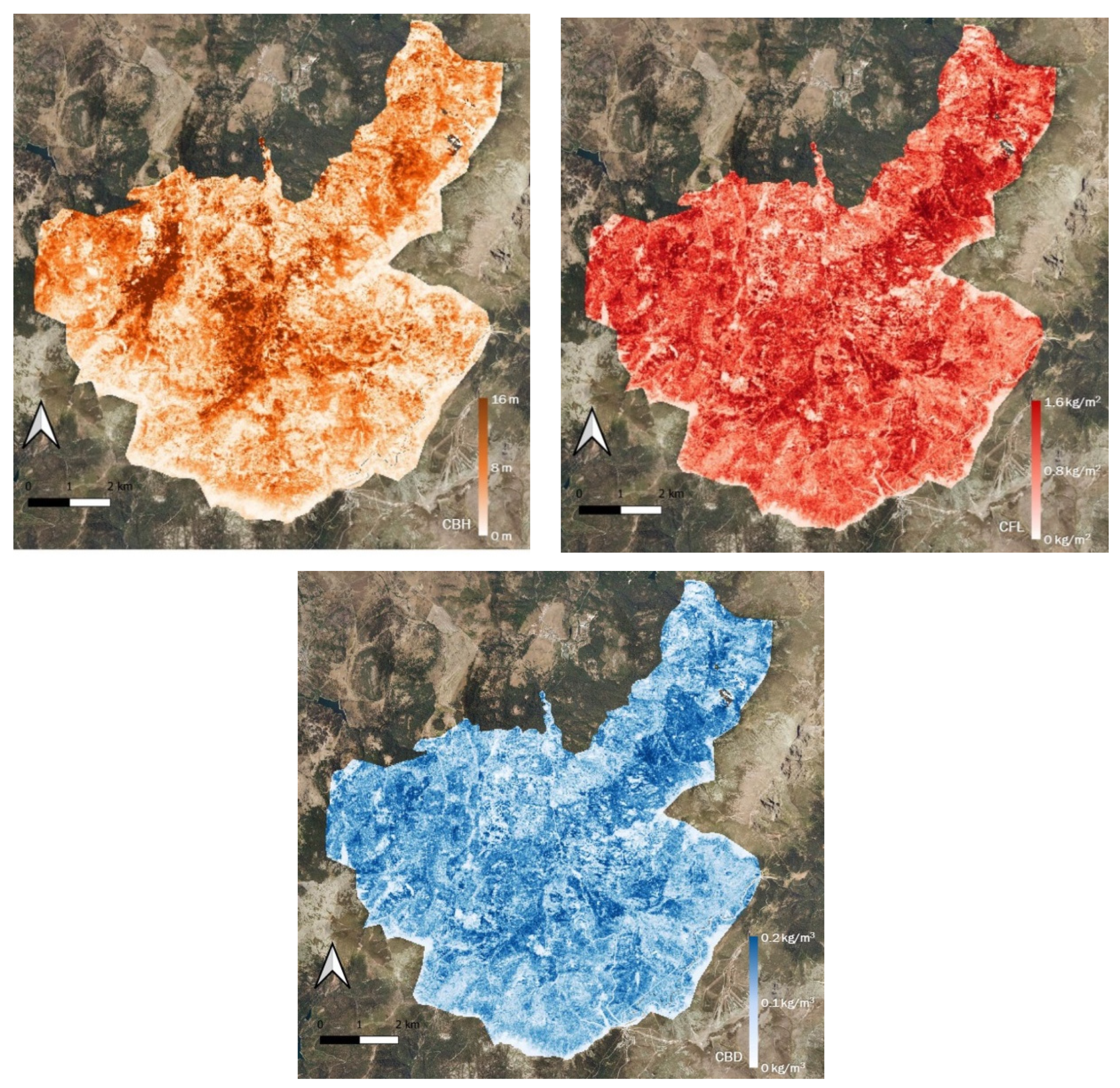
3.3. Canopy Fuel Mapping
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alcasena, F.J.; Salis, M.; Ager, A.A.; Arca, B.; Molina-Terren, D.; Spano, D. Assessing Landscape Scale Wildfire Exposure for Highly Valued Resources in a Mediterranean Area. Environ. Manag. 2015, 55, 1200–1216. [Google Scholar] [CrossRef] [PubMed]
- Salis, M.; Laconi, M.; Ager, A.A.; Alcasena, F.J.; Arca, B.; Lozano, O.; Fernandes de Oliveira, A.; Spano, D. Evaluating alternative fuel treatment strategies to reduce wildfire losses in a Mediterranean area. For. Ecol. Manag. 2016, 368, 207–221. [Google Scholar] [CrossRef]
- Cardil, A.; Monedero, S.; Schag, G.; de-Miguel, S.; Tapia, M.; Stoof, C.R.; Silva, C.A.; Mohan, M.; Cardil, A.; Ramírez, J. Fire behavior modeling for operational decision-making. Curr. Opin. Environ. Sci. Health 2021, 23, 100291. [Google Scholar] [CrossRef]
- Botequim, B.; Fernandes, P.M.; Borges, J.G.; González-Ferreiro, E.; Guerra-Hernández, J. Improving silvicultural practices for Mediterranean forests through fire behaviour modelling using LiDAR-derived canopy fuel characteristics. Int. J. Wildland Fire 2019, 28, 823–839. [Google Scholar] [CrossRef]
- Arellano-Pérez, S.; Castedo-Dorado, F.; Álvarez-González, J.G.; Alonso-Rego, C.; Vega, J.A.; Ruiz-González, A.D. Mid-term effects of a thin-only treatment on fuel complex, potential fire behaviour and severity and post-fire soil erosion protection in fast-growing pine plantations. For. Ecol. Manag. 2020, 460, 117895. [Google Scholar] [CrossRef]
- Finney, M.A. FARSITE: Fire Area Simulator—Model Development and Evaluation; RMRS-RP-4; USDA Forest Service: Washington, DC, USA, 1998.
- Finney, M.A. An Overview of FlamMap Modeling Capabilities; Research Paper RMRS-P-41; USDA Forest Service: Washington, DC, USA; Rocky Mountain Research Station: Fort Collins, CO, USA, 2006.
- Alexander, M.E.; Cruz, M.G. Limitations on the accuracy of model predictions of wildland fire behaviour: A state-of-the-knowledge overview. For. Chron. 2013, 89, 372–383. [Google Scholar] [CrossRef]
- IPCC. Climate Change 2021: The physical science basis. In Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Genva, Switzerland, 2021. [Google Scholar]
- Abram, N.J.; Henley, B.J.; Gupta, A.S.; Lippmann, T.J.R.; Clarke, H.; Dowdy, A.J.; Sharples, J.J.; Nolan, R.H.; Zhang, T.; Wooster, M.J.; et al. Connections of climate change and variability to large and extreme forest fires in southeast Australia. Commun. Earth Environ. 2021, 2, 8. [Google Scholar] [CrossRef]
- Moreira, F.; Ascoli, D.; Safford, H.; Adams, A.M.; Moreno, J.M.; Pereira, J.C.; Catry, F.X.; Armesto, J.; Bond, W.J.; E González, M.; et al. Wildfire management in Mediterranean-type regions: Paradigm change needed. Environ. Res. Lett. 2020, 15, 011001. [Google Scholar] [CrossRef]
- Goss, M.; Swain, D.L.; Abatzoglou, J.T.; Sarhadi, A.; A Kolden, C.; Williams, A.P.; Diffenbaugh, N.S. Climate change is increasing the likelihood of extreme autumn wildfire conditions across California. Environ. Res. Lett. 2020, 15, 094016. [Google Scholar] [CrossRef]
- Nolan, R.H.; Boer, M.M.; Collins, L.; Resco de Dios, V.; Clarke, H.G.; Jenkins, M.; Kenny, B.; Bradstock, R.A. Causes and consequences of eastern Australia’s 2019–2020 season of mega-fires. Glob. Chang. Biol. 2020, 26, 1039–1041. [Google Scholar] [CrossRef] [Green Version]
- Williams, A.P.; Abatzoglou, J.T.; Gershunov, A.; Guzman-Morales, J.; Bishop, D.A.; Balch, J.K.; Lettenmaier, D.P. Observed Impacts of Anthropogenic Climate Change on Wildfire in California. Earth’s Futur. 2019, 7, 892–910. [Google Scholar] [CrossRef]
- Wotton, B.M.; Flannigan, M.D.; Marshall, G.A. Potential climate change impacts on fire intensity and key wildfire suppression thresholds in Canada. Environ. Res. Lett. 2017, 12, 95003. [Google Scholar] [CrossRef]
- Van Wagner, C.E. Conditions for the start and spread of crown fire. Can. J. For. Res. 1977, 7, 23–34. [Google Scholar] [CrossRef]
- Cruz, M.G.; Alexander, M.E.; Wakimoto, R.H. Assessing canopy fuel stratum characteristics in crown fire prone fuel types of western North America. Int. J. Wildland Fire 2003, 12, 39–50. [Google Scholar] [CrossRef]
- Molina, J.R.; Silva, F.R.Y.; Mérida, E.; Herrera, M. Modelling available crown fuel for Pinus pinaster Ait. stands in the “Cazorla, Segura and Las Villas Natural Park” (Spain). J. Environ. Manag. 2014, 144, 26–33. [Google Scholar] [CrossRef] [PubMed]
- Lefsky, M.; Cohen, W.; Acker, S.; Parker, G.; Spies, T.; Harding, D. Lidar Remote Sensing of the Canopy Structure and Biophysical Properties of Douglas-Fir Western Hemlock Forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Hudak, A.T.; Crookston, N.L.; Evans, J.S.; Hall, D.E.; Falkowski, M.J. Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sens. Environ. 2008, 112, 2232–2245. [Google Scholar] [CrossRef]
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies. In Managing Forest Ecosystems; Springer: Brlin/Heidelberg, Germany, 2014. [Google Scholar]
- Marino, E.; Ranz, P.; Tomé, J.L.; Noriega, M.A.; Esteban, J.; Madrigal, J. Generation of high-resolution fuel maps from discrete airborne laser scanner data and Landsat-8 OLI: A low-cost and highly updated methodology for large areas. Remote Sens. Environ. 2016, 187, 267–280. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Salas, J.; Danson, F. Multispectral and LiDAR data fusion for fuel type mapping using Support Vector Machine and decision rules. Remote Sens. Environ. 2011, 115, 1369–1379. [Google Scholar] [CrossRef]
- Huesca, M.; Riaño, D.; Ustin, S.L. Spectral mapping methods applied to LiDAR data: Application to fuel type mapping. Int. J. Appl. Earth Obs. Geoinf. ITC J. 2019, 74, 159–168. [Google Scholar] [CrossRef] [Green Version]
- Riaño, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Andersen, H.-E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Gonzalez-Ferreiro, E.; Arellano-Pérez, S.; Castedo-Dorado, F.; Hevia, A.; Vega, J.A.; Vega-Nieva, D.J.; Álvarez-González, J.G.; Ruiz-González, A.D. Modelling the vertical distribution of canopy fuel load using national forest inventory and low-density airbone laser scanning data. PLoS ONE 2017, 12, e0176114. [Google Scholar] [CrossRef]
- Mauro, F.; Hudak, A.T.; Fekety, P.A.; Frank, B.; Temesgen, H.; Bell, D.M.; Gregory, M.J.; McCarley, T.R. Regional Modeling of Forest Fuels and Structural Attributes Using Airborne Laser Scanning Data in Oregon. Remote Sens. 2021, 13, 261. [Google Scholar] [CrossRef]
- González-Ferreiro, E.; Diéguez-Aranda, U.; Miranda, D. Estimation of stand variables in Pinus radiata D. Don plantations using different LiDAR pulse densities. For. Int. J. For. Res. 2012, 85, 281–292. [Google Scholar] [CrossRef]
- Jakubowski, M.K.; Guo, Q.; Kelly, M. Tradeoffs between lidar pulse density and forest measurement accuracy. Remote Sens. Environ. 2013, 130, 245–253. [Google Scholar] [CrossRef]
- Ruiz, L.A.; Hermosilla, T.; Mauro, F.; Godino, M. Analysis of the Influence of Plot Size and LiDAR Density on Forest Structure Attribute Estimates. Forests 2014, 5, 936–951. [Google Scholar] [CrossRef]
- Fekety, P.A.; Falkowski, M.J.; Hudak, A.T. Temporal transferability of LiDAR based imputation of forest inventory attributes. Can. J. For. Res. 2015, 45, 422–435. [Google Scholar] [CrossRef]
- Fekety, P.A.; Falkowski, M.J.; Hudak, A.T.; Jain, T.B.; Evans, J.S. Transferability of Lidar-derived Basal Area and Stem Density Models within a Northern Idaho Ecoregion. Can. J. Remote Sens. 2018, 44, 131–143. [Google Scholar] [CrossRef]
- Domingo, D.; Alonso, R.; Lamelas, M.T.; Montealegre, A.L.; Rodríguez, F.; de la Riva, J. Temporal Transferability of Pine Forest Attributes Modeling Using Low-Density Airborne Laser Scanning Data. Remote Sens. 2019, 11, 261. [Google Scholar] [CrossRef] [Green Version]
- Navarro, J.A.; Tomé, J.L.; Marino, E.; Guillén-Climent, M.; Fernández-Landa, A. Assessing the transferability of airborne laser scanning and digital aerial photogrammetry derived growing stock volume models. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102135. [Google Scholar] [CrossRef]
- Roussel, J.-R.; Caspersen, J.; Béland, M.; Thomas, S.; Achim, A. Removing bias from LiDAR-based estimates of canopy height: Accounting for the effects of pulse density and footprint size. Remote Sens. Environ. 2017, 198, 1–16. [Google Scholar] [CrossRef]
- Engelstad, P.S.; Falkowski, M.; Wolter, P.; Poznanovic, A.; Johnson, P. Estimating Canopy Fuel Attributes from Low-Density LiDAR. Fire 2019, 2, 38. [Google Scholar] [CrossRef]
- Montero, G.; Ruiz-Peinado, R.; Múñoz, M. Producción de biomasa y fijación de CO2 por los bosques de España; INIA: Madrid, Spain, 2005; p. 270. [Google Scholar]
- McGaughey, R.J. FUSION/LDV: Software for LIDAR Data Analysis and Visualization, Version 3.42; U.S. Department of Agriculture, Forest Service: Washington, DC, USA; Pacific Northwest Research Station: Corvallis, OR, USA; University of Washington: Seattle, WA, USA, 2014; p. 179.
- QGIS Development Team; Quantum GIS Geographic Information System. Open Source Geospatial Foundation Project. 2022. Available online: http://qgis.osgeo.org/ (accessed on 22 August 2022).
- Skowronski, N.; Clark, K.; Nelson, R.; Hom, J.; Patterson, M. Remotely sensed measurements of forest structure and fuel loads in the Pinelands of New Jersey. Remote Sens. Environ. 2007, 108, 123–129. [Google Scholar] [CrossRef]
- Marino, E.; Montes, F.; Tomé, J.L.; Navarro, J.A.; Hernando, C. Vertical forest structure analysis for wildfire prevention: Comparing airborne laser scanning data and stereoscopic hemispherical images. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 438–449. [Google Scholar] [CrossRef]
- Kramer, H.A.; Collins, B.M.; Kelly, M.; Stephens, S.L. Quantifying Ladder Fuels: A New Approach Using LiDAR. Forests 2014, 5, 1432–1453. [Google Scholar] [CrossRef]
- R Development Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2014. [Google Scholar]
- González-Ferreiro, E.; Diéguez-Aranda, U.; Crecente-Campo, F.; Barreiro-Fernández, L.; Miranda, D.; Dorado, F.C. Modelling canopy fuel variables for Pinus radiata D. Don in NW Spain with low-density LiDAR data. Int. J. Wildland Fire 2014, 23, 350–362. [Google Scholar] [CrossRef]
- Fidalgo-González, L.; Arellano-Pérez, S.; Castedo-Dorado, F.; Ruiz-González, A.D.; González-Ferreiro, E. Estimación de la distribución vertical de combustibles finos del dosel de copas en masas de Pinus sylvestris empleando datos LiDAR de baja densidad. Rev. Teledetección 2019, 53, 1–16. [Google Scholar] [CrossRef]
- Hevia, A.; Álvarez-González, J.G.; Ruiz-Fernández, E.; Prendes, C.; Ruiz-González, A.D.; Majada, J.; González-Ferreiro, E. Modelling canopy fuel and forest stand variables and characterizing the influence of thinning in the stand structure using airborne LiDAR. Rev. Teledetección 2016, 45, 41–55. [Google Scholar] [CrossRef]
- Alonso-Rego, C.; Arellano-Pérez, S.; Guerra-Hernández, J.; Molina-Valero, J.A.; Martínez-Calvo, A.; Pérez-Cruzado, C.; Castedo-Dorado, F.; González-Ferreiro, E.; Álvarez-González, J.G.; Ruiz-González, A.D. Estimating Stand and Fire-Related Surface and Canopy Fuel Variables in Pine Stands Using Low-Density Airborne and Single-Scan Terrestrial Laser Scanning Data. Remote Sens. 2021, 13, 5170. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ALS Data | ALS Flight | Year | Pulse Density | Field Plots | RMSE xy | RMSE z | Sensor |
|---|---|---|---|---|---|---|---|
| PNOA-2010 | PNOA 1st coverage Segovia | 2010 | 0.5 p/m2 | 202 | 0.3 m | 0.4 m | LEICA ALS50 |
| PNOA-2018 | PNOA 2nd coverage Segovia | 2018 | 1.0 p/m2 | 30 | 0.2 m | 0.15 m | LEICA ALS80 |
| PNOA-2016 | PNOA 2nd coverage Madrid * | 2016 | 1.7 p/m2 | 14 | 0.2 m | 0.15 m | LEICA ALS70-HP |
| SPASA | Specific flight over the study area | 2019 | 4.0 p/m2 | 10 | 0.3 m | 0.2 m | LEICA ALS80 |
| Metric Acronym | Description |
|---|---|
| h_min | Minimum of return heights |
| h_max | Maximum of return heights |
| h_mean | Mean of return heights |
| h_mode | Mode of return heights |
| h_std | Standard deviation of return heights |
| h_var | Variance of return heights |
| h_CV | Coefficient of variation of return heights |
| h_IQ | Interquartile range of return heights |
| h_skew | Skewness of return heights |
| h_kurt | Kurtosis of return heights |
| h_AAD | Average absolute deviation from mean height |
| h_MADmedian | Median absolute deviation from median height |
| h_MADmode | Median absolute deviation from mode height |
| P05, P10, P20, P25, P30, P40, P50, P60, P70, P75, P80, P90, P95, P99 | Percentiles 5, 10, 20, 25, 30, 40, 50, 60, 70, 75, 80, 90, 95 and 99 of return heights |
| CRR | Canopy relief ratio (h_mean–h_min)/(h_max–h_min) |
| PFRi | Percentage of first returns above threshold height i |
| PFRmean | Percentage of first returns above mean height |
| PFRmode | Percentage of first returns above mode height |
| PARi | Percentage of all returns above threshold height i |
| PARmean | Percentage of all returns above mean height |
| PARmode | Percentage of all returns above mode height |
| PRN_Si | Percentage of returns normalized by height strata, calculated from the number of returns (NR) within and below each strata (Si): (NRi+1/(NRtotal − NRi)) × 100 |
| Statistic | N | G | Dg | H | CBH | CFL | CBD |
|---|---|---|---|---|---|---|---|
| Minimum | 240.2 | 18.8 | 15.6 | 11.2 | 2.2 | 0.47 | 0.04 |
| Maximum | 2273.5 | 74.6 | 44.9 | 32.3 | 22.2 | 1.73 | 0.30 |
| Mean | 873.4 | 41.1 | 28.0 | 20.4 | 8.3 | 1.00 | 0.12 |
| s.d. | 490.8 | 12.5 | 9.1 | 5.6 | 4.7 | 0.31 | 0.05 |
| Variable | Model | Input Metrics | R2adj | RMSE | MAPE |
|---|---|---|---|---|---|
| CBH (m) | linear | h_skew PRN_6-8 | 0.701 | 2.44 | 38.3% |
| power | h_mean PRN_3-4 | 0.827 | 1.84 | 22.5% | |
| exponential | h_mean PRN_3-4 | 0.871 | 1.85 | 18.4% | |
| CFL (kg/m2) | linear | PFR PRN_7-8 | 0.656 | 0.17 | 15.8% |
| power | PFR P05 | 0.615 | 0.17 | 15.9% | |
| exponential | PFR PRN_1-2 | 0.680 | 0.16 | 14.4% | |
| CBD (kg/m3) | linear | PFR PRN_1-2 | 0.585 | 0.03 | 21.8% |
| power | PFR | 0.473 | 0.04 | 21.6% | |
| exponential | PFR PRN_1-2 | 0.576 | 0.03 | 19.7% |
| Statistics | N | G | H | CBH * | CFL | CBD |
|---|---|---|---|---|---|---|
| Minimum | 75.3 | 14.3 | 8.5 | 3.1 | 0.51 | 0.05 |
| Maximum | 2147.2 | 91.0 | 35.4 | 22.1 | 1.69 | 0.20 |
| Mean | 604.1 | 41.7 | 20.6 | 11.5 | 0.96 | 0.11 |
| s.d. | 374.1 | 14.5 | 5.1 | 5.2 | 0.32 | 0.04 |
| Variable | Model | LiDAR Data | R2 | RMSE | MAPE | Bias |
|---|---|---|---|---|---|---|
| CBH (m) | linear | PNOA-2010 | 0.257 | 5.79 | 36.2% | 3.27 |
| PNOA-2016 | 0.525 | 2.49 | 47.2% | −0.86 | ||
| SPASA | 0.085 | 2.32 | 33.3% | 0.71 | ||
| power | PNOA-2010 | 0.275 | 6.94 | 43.6% | 4.81 | |
| PNOA-2016 | 0.875 | 2.39 | 36.1% | −1.40 | ||
| SPASA | 0.463 | 1.37 | 20.4% | 0.56 | ||
| exponential | PNOA-2010 | 0.217 | 6.24 | 32.3% | 3.62 | |
| PNOA-2016 | 0.853 | 1.52 | 30.4% | −0.82 | ||
| SPASA | 0.717 | 1.67 | 31.0% | 1.40 | ||
| CFL (kg/m2) | linear | PNOA-2010 | 0.664 | 0.19 | 18.3% | 0.05 |
| PNOA-2016 | 0.880 | 0.15 | 13.3% | 0.11 | ||
| SPASA | 0.656 | 0.17 | 17.4% | −0.05 | ||
| power | PNOA-2010 | 0.668 | 0.17 | 15.5% | 0.05 | |
| PNOA-2016 | 0.894 | 0.13 | 10.2% | 0.09 | ||
| SPASA | 0.693 | 0.16 | 16.3% | −0.02 | ||
| exponential | PNOA-2010 | 0.672 | 0.19 | 17.3% | 0.04 | |
| PNOA-2016 | 0.881 | 0.11 | 8.6% | 0.03 | ||
| SPASA | 0.743 | 0.15 | 15.5% | −0.05 | ||
| CBD (kg/m3) | linear | PNOA-2010 | 0.625 | 0.027 | 23.1% | 0.001 |
| PNOA-2016 | 0.762 | 0.025 | 16.4% | 0.011 | ||
| SPASA | 0.520 | 0.029 | 24.4% | −0.004 | ||
| power | PNOA-2010 | 0.576 | 0.022 | 19.0% | −0.003 | |
| PNOA-2016 | 0.771 | 0.025 | 14.5% | 0.013 | ||
| SPASA | 0.505 | 0.033 | 31.2% | −0.016 | ||
| exponential | PNOA-2010 | 0.666 | 0.026 | 21.1% | −0.005 | |
| PNOA-2016 | 0.772 | 0.023 | 15.4% | 0.006 | ||
| SPASA | 0.602 | 0.027 | 23.6% | −0.008 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marino, E.; Tomé, J.L.; Hernando, C.; Guijarro, M.; Madrigal, J. Transferability of Airborne LiDAR Data for Canopy Fuel Mapping: Effect of Pulse Density and Model Formulation. Fire 2022, 5, 126. https://doi.org/10.3390/fire5050126
Marino E, Tomé JL, Hernando C, Guijarro M, Madrigal J. Transferability of Airborne LiDAR Data for Canopy Fuel Mapping: Effect of Pulse Density and Model Formulation. Fire. 2022; 5(5):126. https://doi.org/10.3390/fire5050126
Chicago/Turabian StyleMarino, Eva, José Luis Tomé, Carmen Hernando, Mercedes Guijarro, and Javier Madrigal. 2022. "Transferability of Airborne LiDAR Data for Canopy Fuel Mapping: Effect of Pulse Density and Model Formulation" Fire 5, no. 5: 126. https://doi.org/10.3390/fire5050126
APA StyleMarino, E., Tomé, J. L., Hernando, C., Guijarro, M., & Madrigal, J. (2022). Transferability of Airborne LiDAR Data for Canopy Fuel Mapping: Effect of Pulse Density and Model Formulation. Fire, 5(5), 126. https://doi.org/10.3390/fire5050126