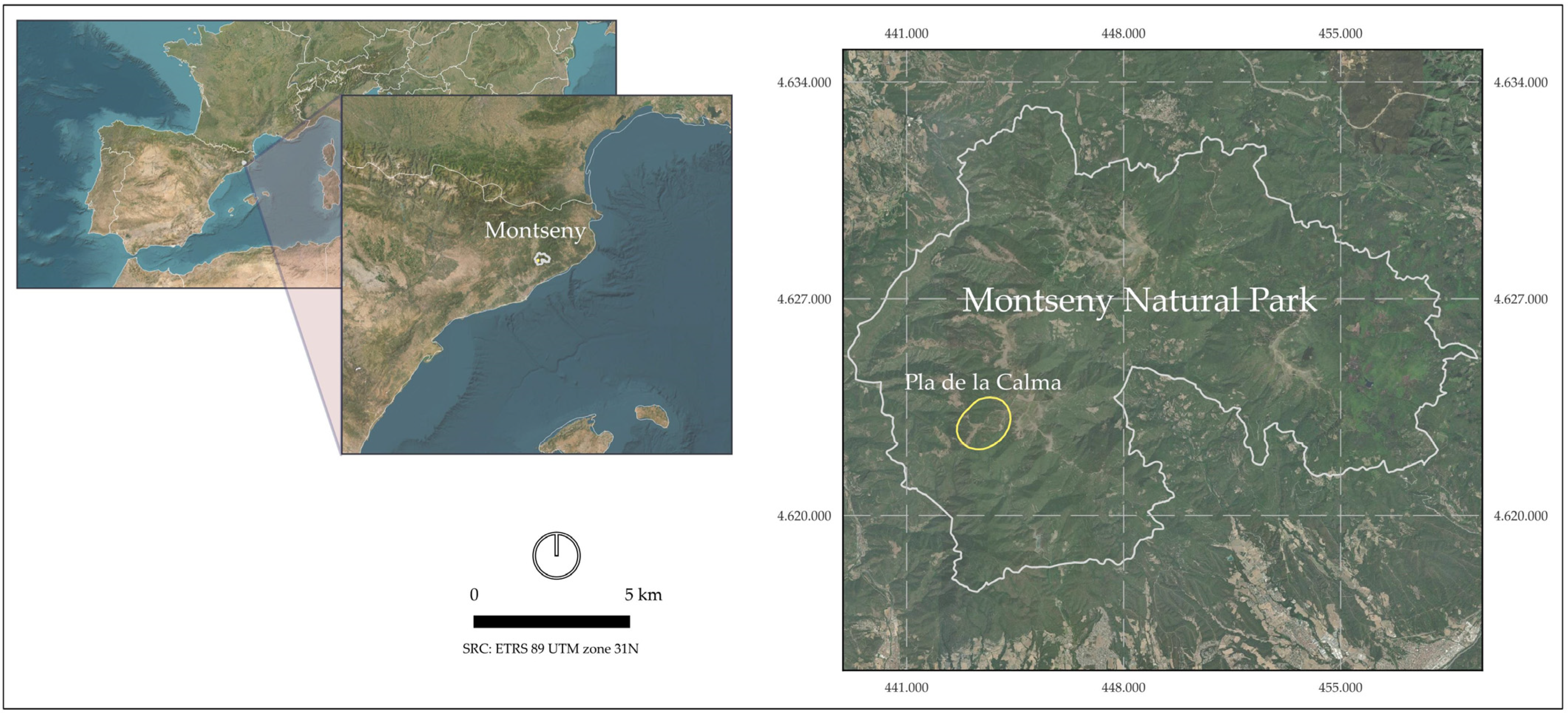
Figure 1.
The figure displays the study area’s location within the Montseny Natural Park, a Biosphere Reserve. Pla de la Calma, the area of interest, is indicated by the yellow circle.
Figure 1.
The figure displays the study area’s location within the Montseny Natural Park, a Biosphere Reserve. Pla de la Calma, the area of interest, is indicated by the yellow circle.
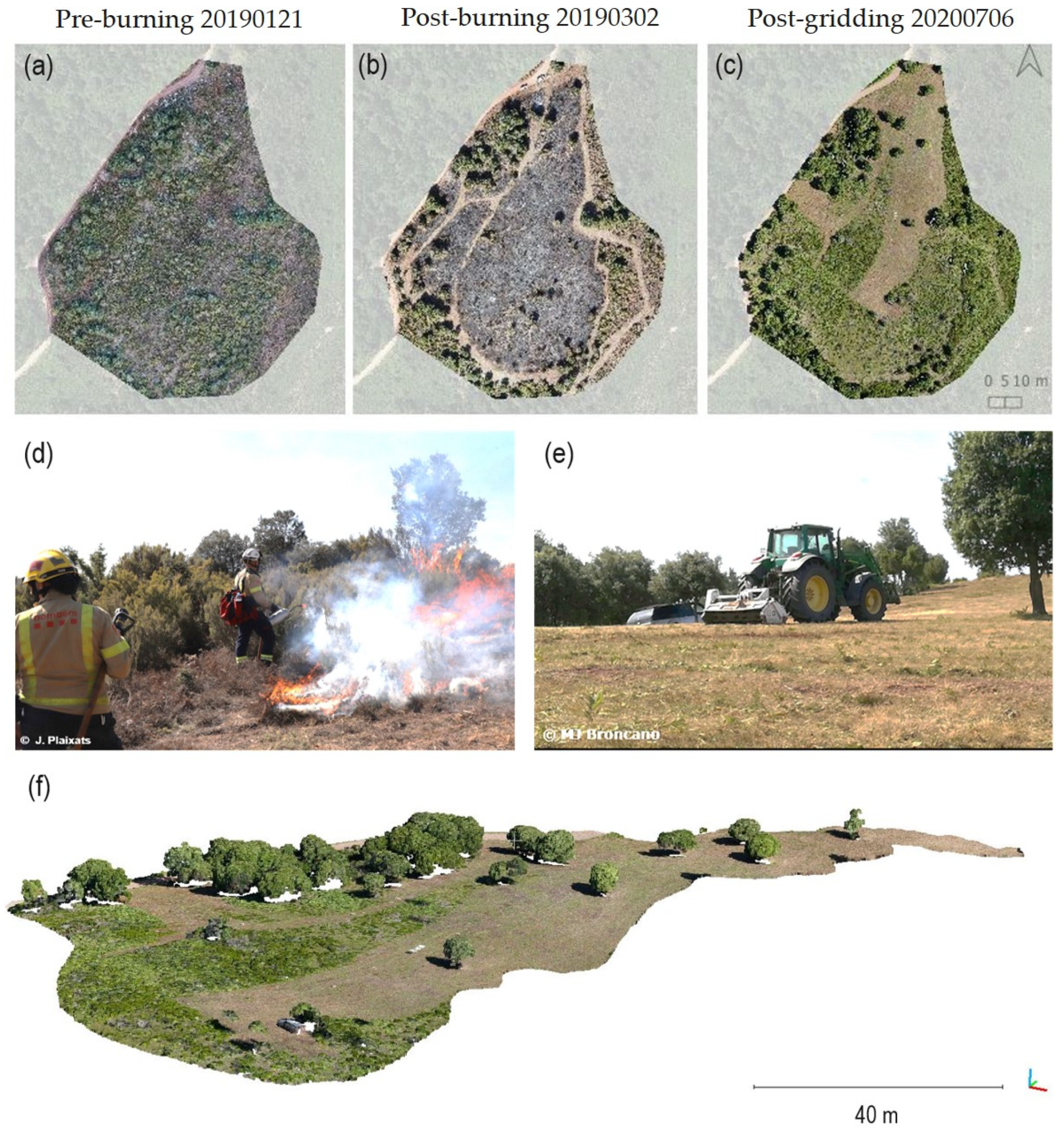
Figure 2.
(a–c) This sequence of RGB orthomosaics (0.01 m/px.) illustrates the process of the treatment and subsequent gridding. (d) Specific details of the controlled prescribed burning treatment conducted by the fire brigade of the Generalitat de Catalunya. (e) Close-up details of the gridding process carried out by environmental agents. (f) Rendered 3D point cloud representation of the study area after gridding.
Figure 2.
(a–c) This sequence of RGB orthomosaics (0.01 m/px.) illustrates the process of the treatment and subsequent gridding. (d) Specific details of the controlled prescribed burning treatment conducted by the fire brigade of the Generalitat de Catalunya. (e) Close-up details of the gridding process carried out by environmental agents. (f) Rendered 3D point cloud representation of the study area after gridding.
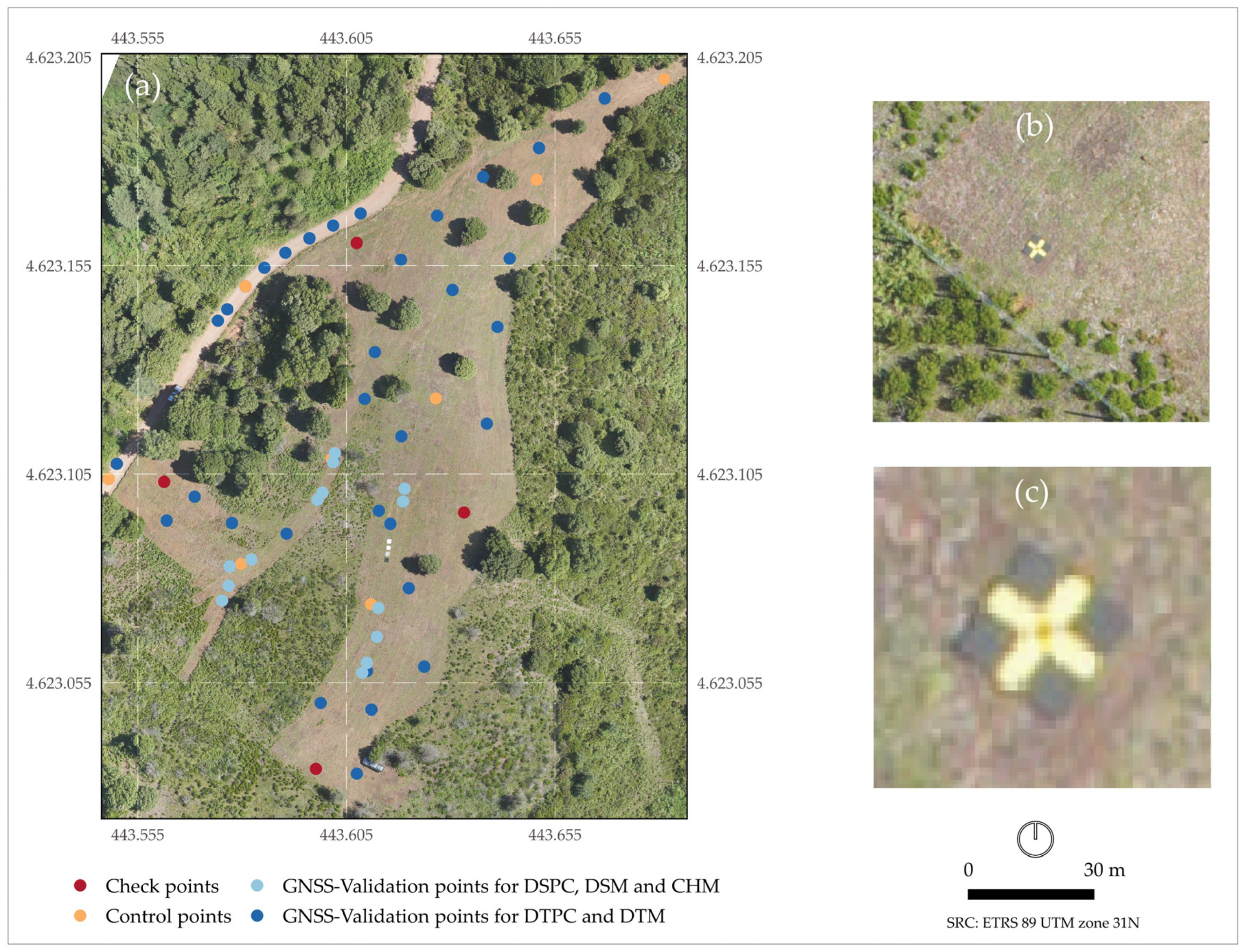
Figure 3.
(a) An overview of the study area, including the distribution of Ground Control Points (GCPs) represented by check points and control points. (b) A close-up view of the rubber objects utilized as both check points and control points. (c) A zoomed-in detail of the rubber objects.
Figure 3.
(a) An overview of the study area, including the distribution of Ground Control Points (GCPs) represented by check points and control points. (b) A close-up view of the rubber objects utilized as both check points and control points. (c) A zoomed-in detail of the rubber objects.
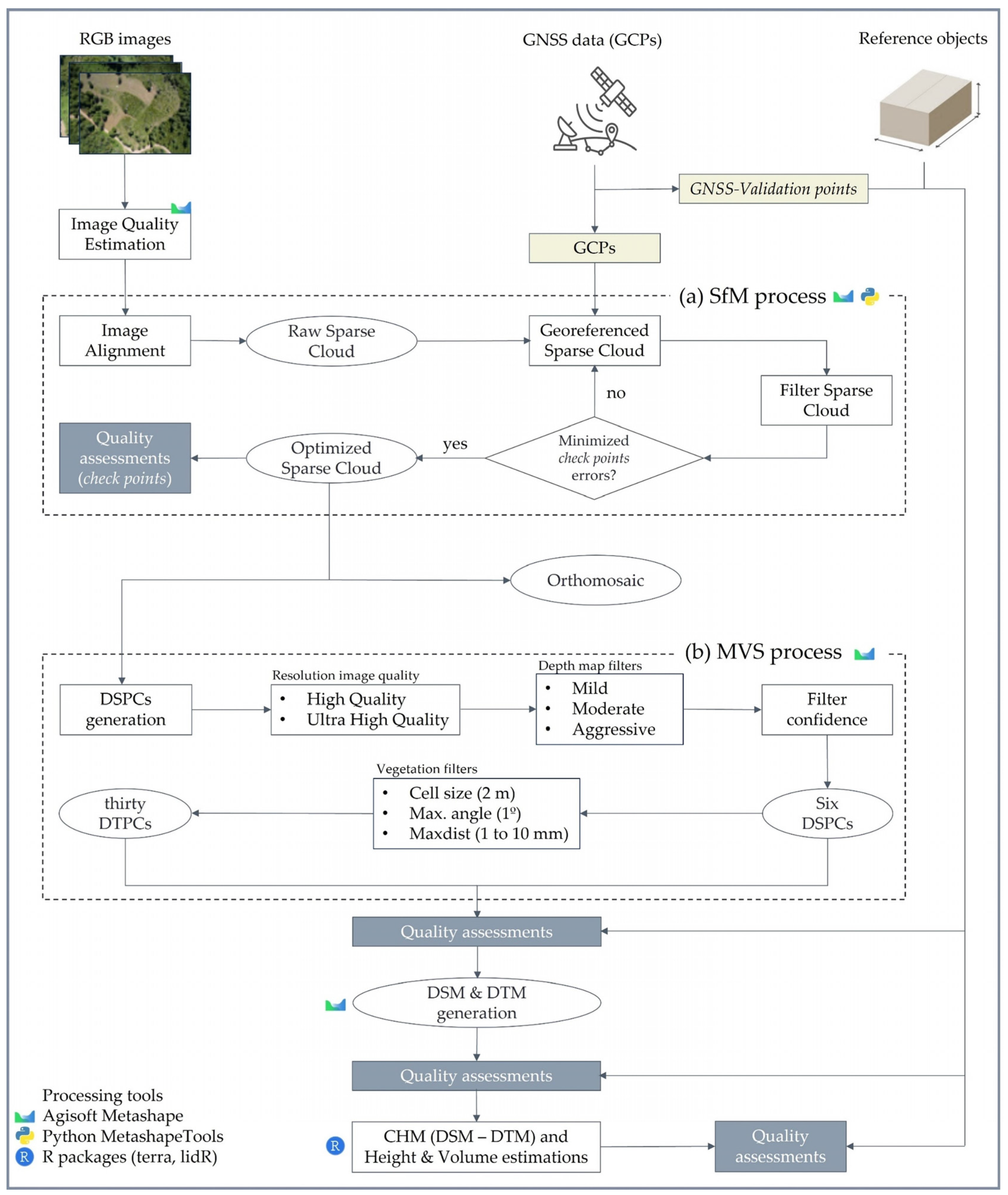
Figure 4.
(
a) Illustrates the optimized workflow for the Metashape Structure from Motion (SfM) (Ludwig et al, 2020 [
50]). (
b) Represents the Metashape Multi-View Stereopsis (MVS) testing process and the final evaluation of the generated Digital Elevation Models (DEMs) and Canopy Height Models (CHMs) in this study.
Figure 4.
(
a) Illustrates the optimized workflow for the Metashape Structure from Motion (SfM) (Ludwig et al, 2020 [
50]). (
b) Represents the Metashape Multi-View Stereopsis (MVS) testing process and the final evaluation of the generated Digital Elevation Models (DEMs) and Canopy Height Models (CHMs) in this study.
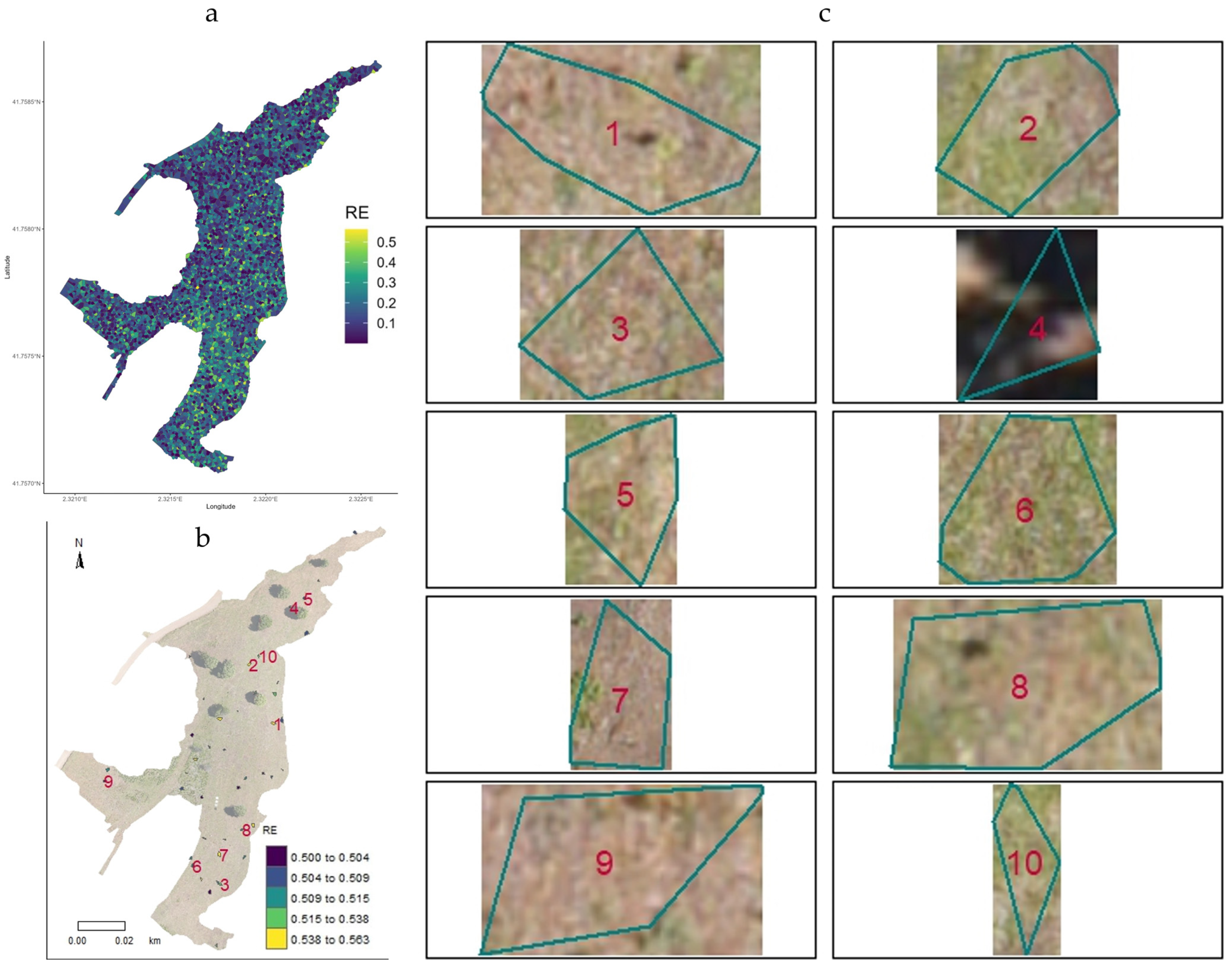
Figure 5.
(a) Voronoi tessellations illustrating the spatial distribution of reprojection errors (Res), highlighting heterogeneity. (b) Magnified regions showcasing areas with reprojection errors > 0.5. (c) Close-up examples of various areas with pronounced reprojection errors, including bare terrains, shaded regions, and blurry images.
Figure 5.
(a) Voronoi tessellations illustrating the spatial distribution of reprojection errors (Res), highlighting heterogeneity. (b) Magnified regions showcasing areas with reprojection errors > 0.5. (c) Close-up examples of various areas with pronounced reprojection errors, including bare terrains, shaded regions, and blurry images.
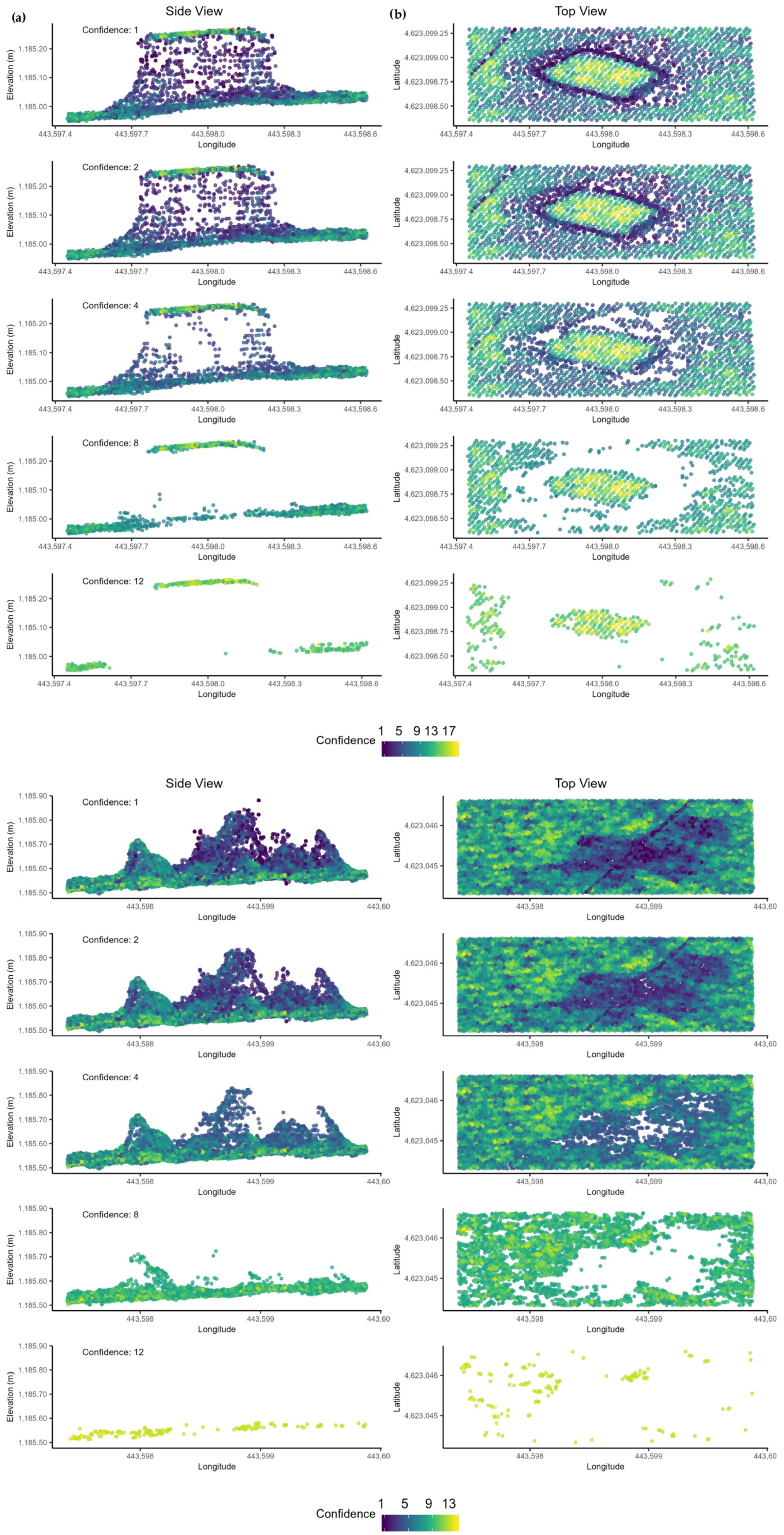
Figure 6.
Effects of iterative filtering using different thresholds: (a) reference box and surrounding area and (b) shrub area.
Figure 6.
Effects of iterative filtering using different thresholds: (a) reference box and surrounding area and (b) shrub area.
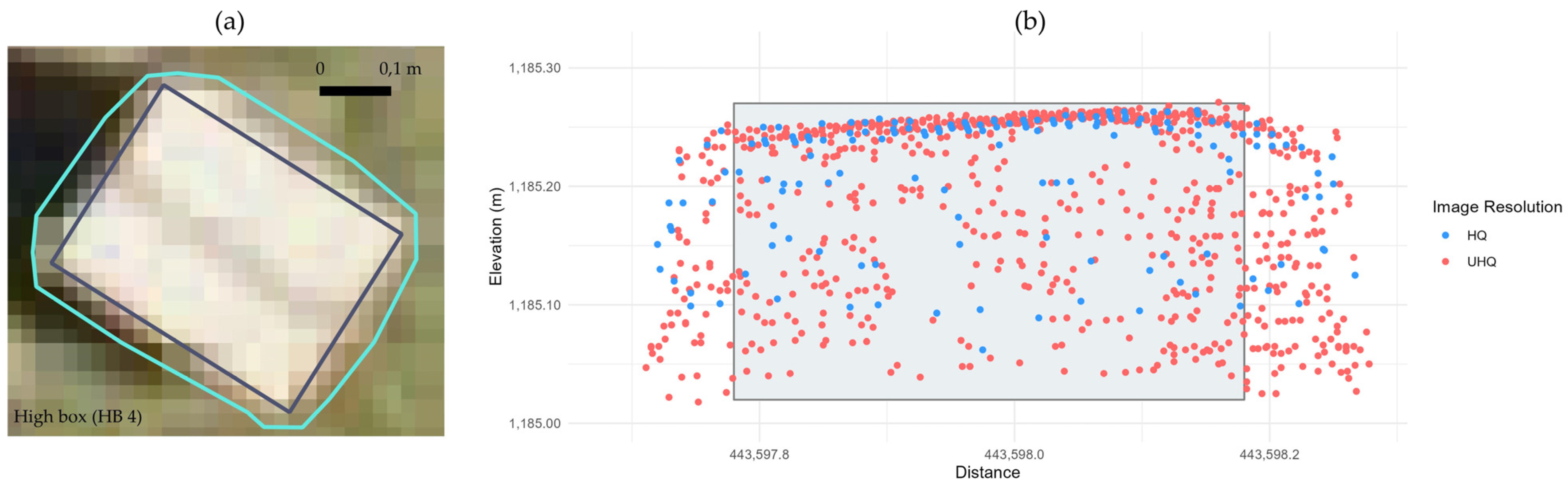
Figure 7.
(a) Interactive segmentation of one of the boxes (cyan) and the actual rectangle of the upper side (blue). (b) Vertical distribution of DSPC HQ (blue points) and UHQ (red points) versions within the cyan polygon in (a). The vertical rectangle represents the vertical section of the box, depicted at the same scale.
Figure 7.
(a) Interactive segmentation of one of the boxes (cyan) and the actual rectangle of the upper side (blue). (b) Vertical distribution of DSPC HQ (blue points) and UHQ (red points) versions within the cyan polygon in (a). The vertical rectangle represents the vertical section of the box, depicted at the same scale.
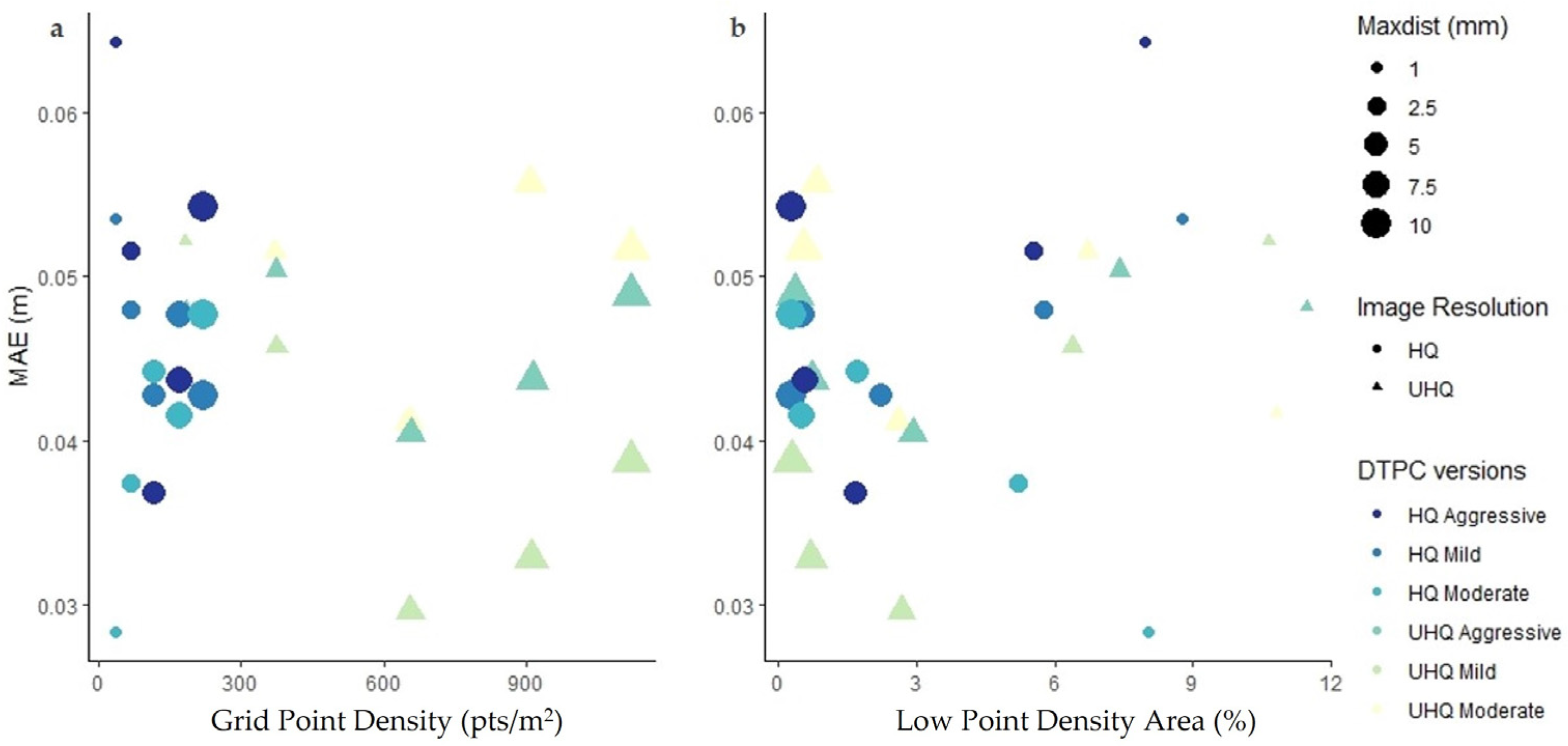
Figure 8.
Graphic presentation of elevation accuracy (MAE) for each Dense Terrain Point Cloud (DTPC) version, accompanied by the metrics (a) grid density and (b) low-point density area, Grouped according to image quality resolution levels (ultrahigh quality (UHQ) and high quality (HQ)), depth filter levels (aggressive, mild, and moderate), and maxdist terrain point classification parameters (1 mm, 2.5 mm, 5 mm, 7.5 mm, and 10 mm).
Figure 8.
Graphic presentation of elevation accuracy (MAE) for each Dense Terrain Point Cloud (DTPC) version, accompanied by the metrics (a) grid density and (b) low-point density area, Grouped according to image quality resolution levels (ultrahigh quality (UHQ) and high quality (HQ)), depth filter levels (aggressive, mild, and moderate), and maxdist terrain point classification parameters (1 mm, 2.5 mm, 5 mm, 7.5 mm, and 10 mm).
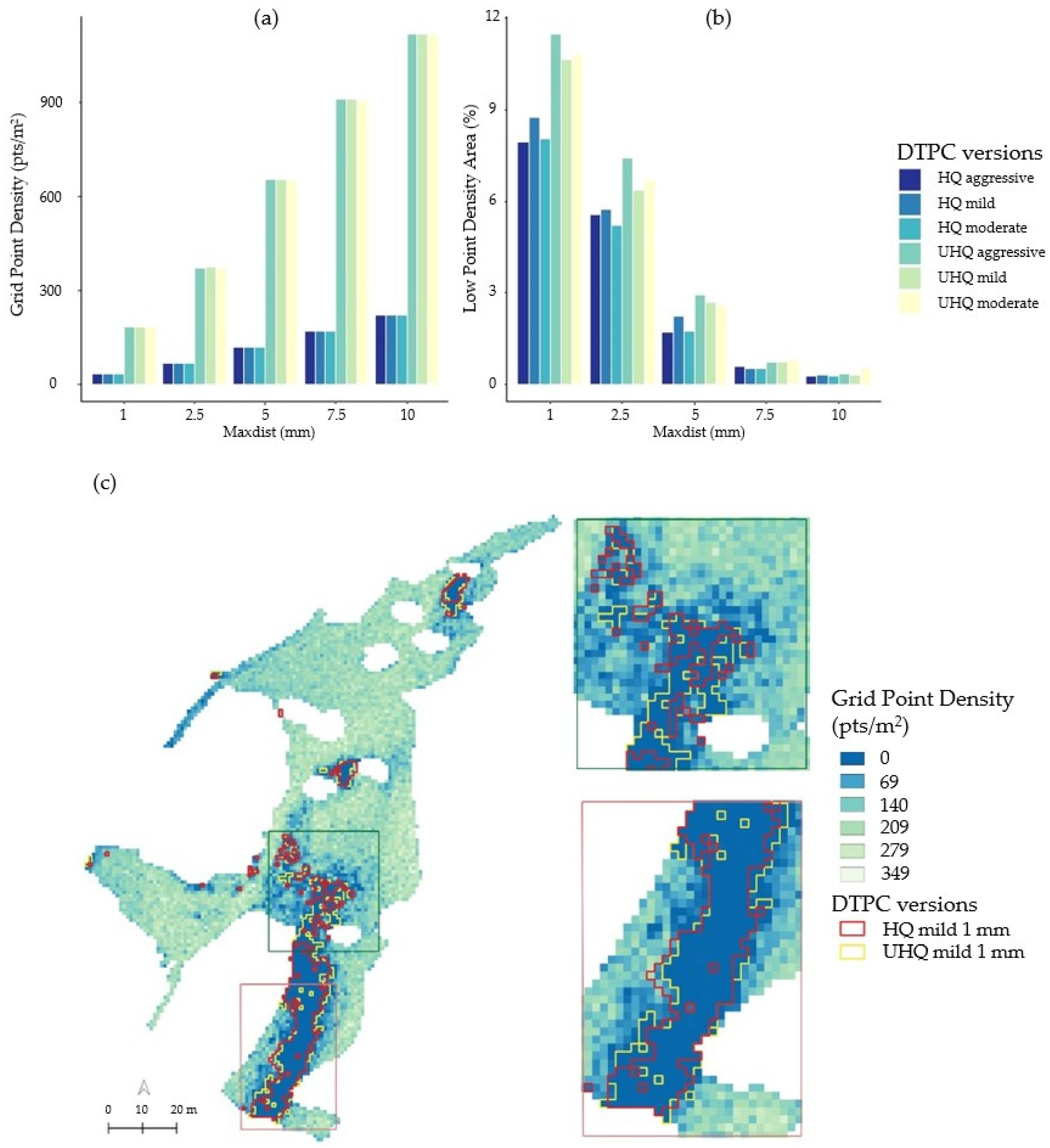
Figure 9.
Visual representation of point resolution metrics for each Dense Terrain Point Cloud (DTPC) version based on image quality resolution levels (ultrahigh quality (UHQ) and high quality (HQ)), depth filter levels (aggressive, mild, and moderate), and maxdist terrain point classification parameter (1, 2.5, 5, 7.5, and 10 mm). (a) Grid density metric. (b) Low-point density area metric. For illustrative purposes, (c) highlights the discrepancy in terms of spatial distribution of the low-point density area (<5 pts/m2, indicated in blue (0 value) in the legend) between the DTPC HQ mild 1 mm (red vector) and UHQ mild 1 mm (yellow vector) versions.
Figure 9.
Visual representation of point resolution metrics for each Dense Terrain Point Cloud (DTPC) version based on image quality resolution levels (ultrahigh quality (UHQ) and high quality (HQ)), depth filter levels (aggressive, mild, and moderate), and maxdist terrain point classification parameter (1, 2.5, 5, 7.5, and 10 mm). (a) Grid density metric. (b) Low-point density area metric. For illustrative purposes, (c) highlights the discrepancy in terms of spatial distribution of the low-point density area (<5 pts/m2, indicated in blue (0 value) in the legend) between the DTPC HQ mild 1 mm (red vector) and UHQ mild 1 mm (yellow vector) versions.
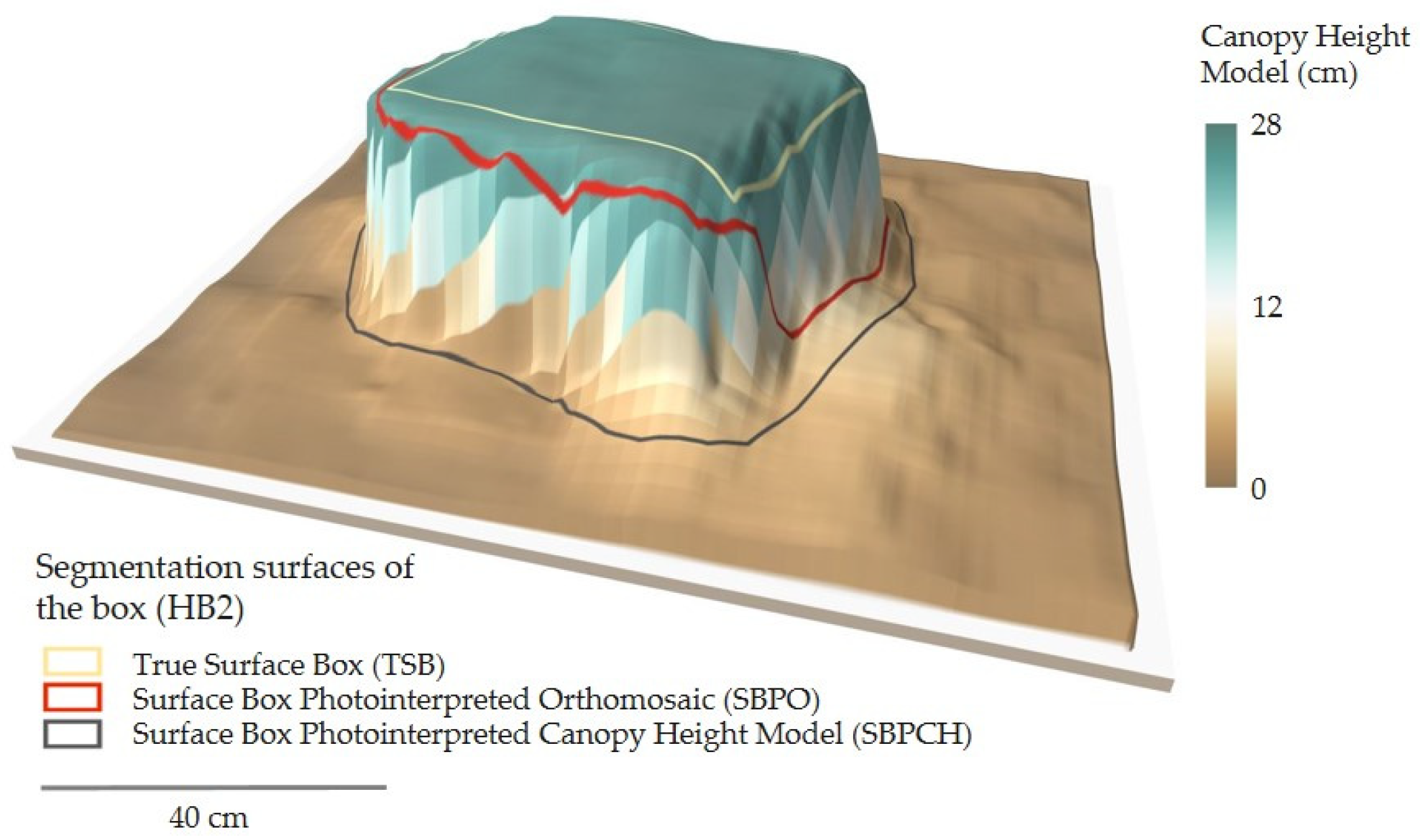
Figure 10.
Three-dimensional visualization of CHM for one of the reference objects (High Box 2 (HB2)). This includes interactive segmentation edited to represent the true surface at the top of the box (TSB, yellow), the surface of the box photointerpreted on the orthomosaic (SBPO, red), and the surface of the box photointerpreted on the CHM (SBPCH, gray).
Figure 10.
Three-dimensional visualization of CHM for one of the reference objects (High Box 2 (HB2)). This includes interactive segmentation edited to represent the true surface at the top of the box (TSB, yellow), the surface of the box photointerpreted on the orthomosaic (SBPO, red), and the surface of the box photointerpreted on the CHM (SBPCH, gray).
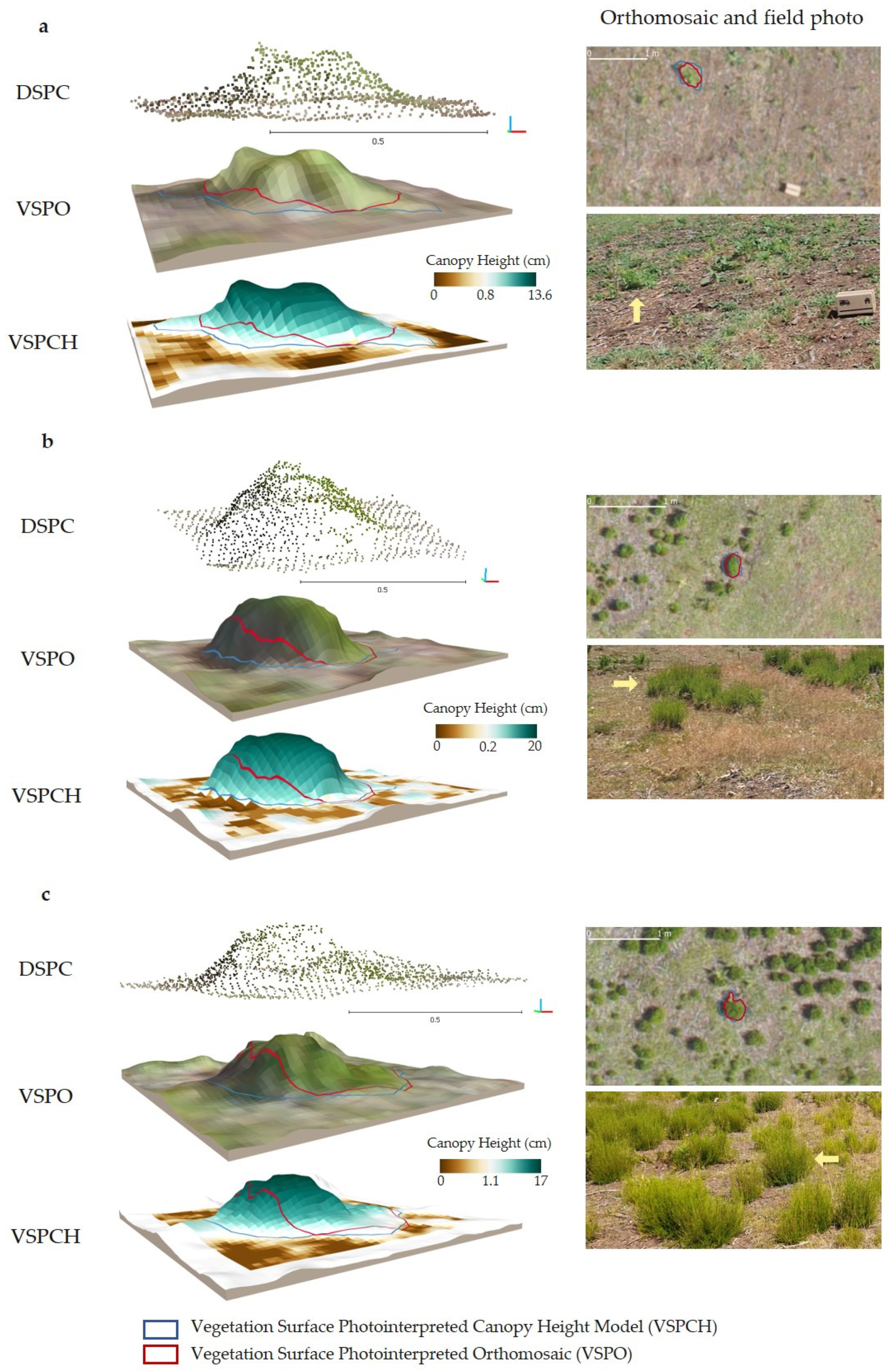
Figure 11.
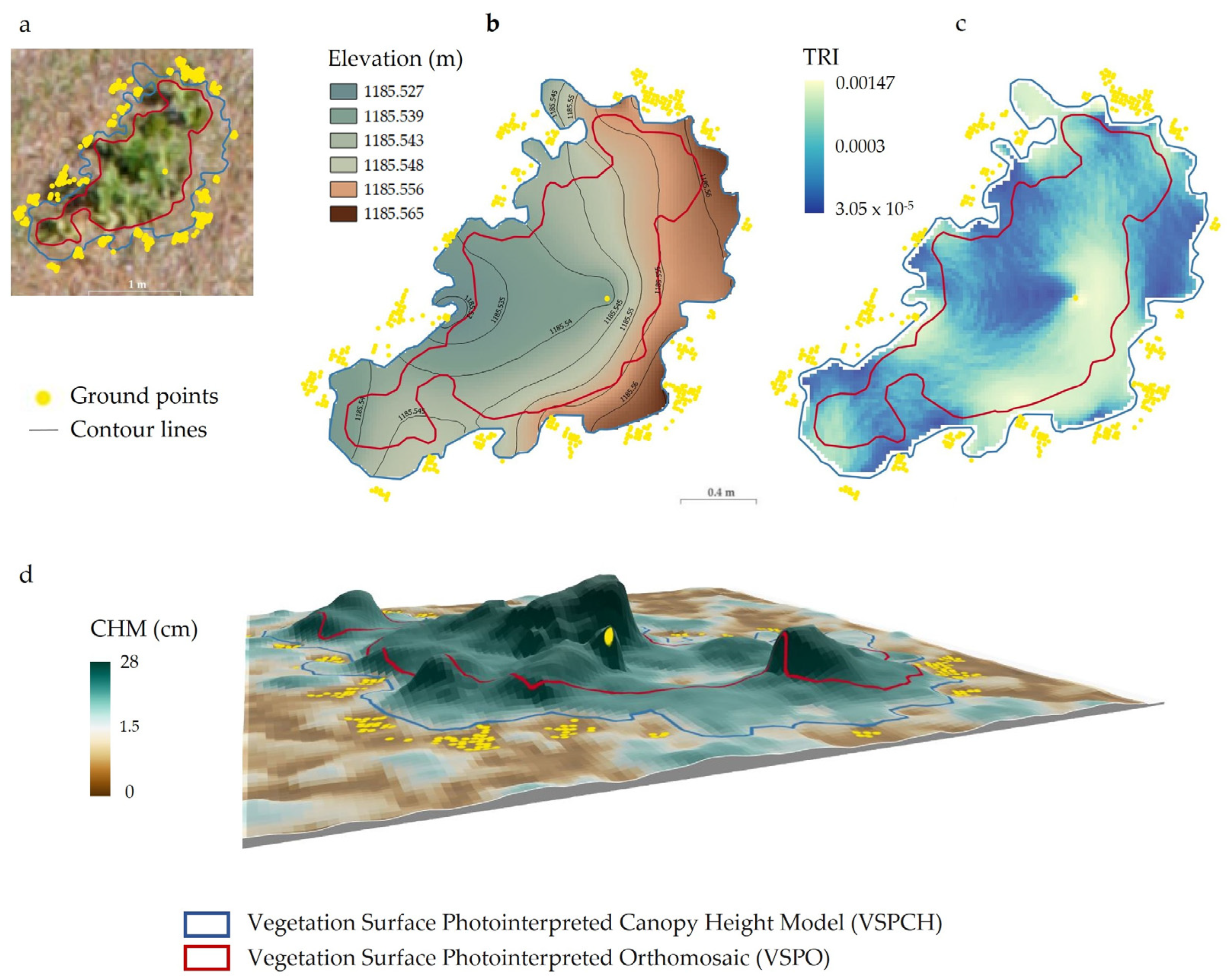
Three-dimensional renderings of individual plants from the Dense Surface Point Cloud (DSPC), photointerpreted vegetation surface on the orthomosaic (VSPO, red segment), and Canopy Height Model (VSPCH, blue Segment), along with their respective edited segments. (a) Pteridium aquilinum (L.) Kuhn (13.6 cm Height). (b,c) Erica scoparia L. E. arborea L. (20 and 17 cm Height, respectively). Sections (a–c) feature segmentations of individual plants VSPO and VSPCH on the orthomosaic (2 cm spatial resolution) corresponding to field photographs taken from different viewpoints and scales than the 3D representations.
Figure 11.
Three-dimensional renderings of individual plants from the Dense Surface Point Cloud (DSPC), photointerpreted vegetation surface on the orthomosaic (VSPO, red segment), and Canopy Height Model (VSPCH, blue Segment), along with their respective edited segments. (a) Pteridium aquilinum (L.) Kuhn (13.6 cm Height). (b,c) Erica scoparia L. E. arborea L. (20 and 17 cm Height, respectively). Sections (a–c) feature segmentations of individual plants VSPO and VSPCH on the orthomosaic (2 cm spatial resolution) corresponding to field photographs taken from different viewpoints and scales than the 3D representations.
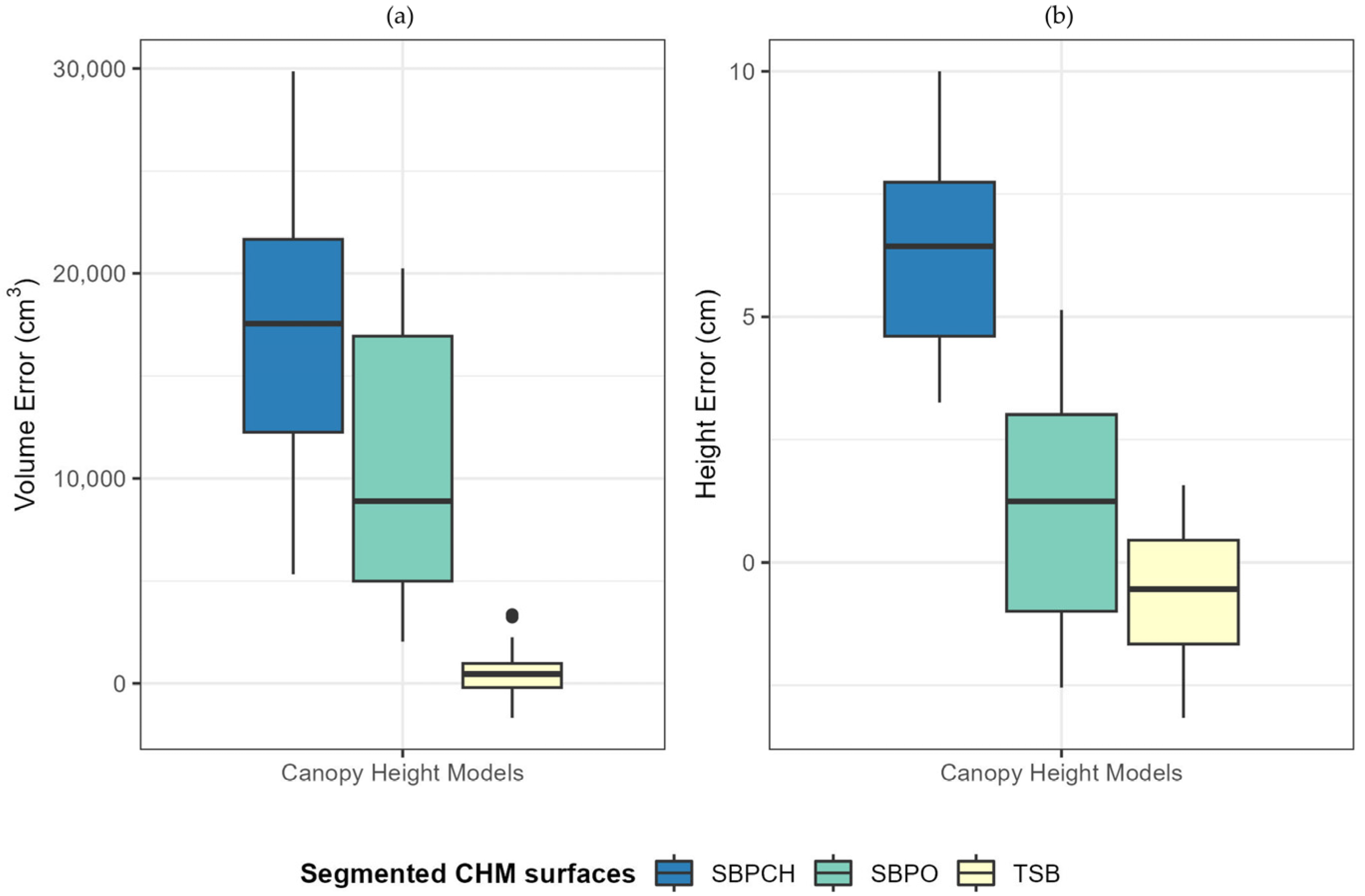
Figure 12.
Distribution of (a) volume errors and (b) height errors for the CHM versions based on three segments: true surface box (TSB), surface box photointerpreted orthomosaic (SBPO), and surface box photointerpreted canopy height (SBPCH). All CHMs employed DSM ultrahigh-quality (UHQ) and mild parameters, with the DTMs used for CHM specified on the X-axis.
Figure 12.
Distribution of (a) volume errors and (b) height errors for the CHM versions based on three segments: true surface box (TSB), surface box photointerpreted orthomosaic (SBPO), and surface box photointerpreted canopy height (SBPCH). All CHMs employed DSM ultrahigh-quality (UHQ) and mild parameters, with the DTMs used for CHM specified on the X-axis.
Table 1.
Description of the dimensions and heights of the boxes as reference objects.
Table 1.
Description of the dimensions and heights of the boxes as reference objects.
| Reference Object | Height (cm) | Dimensions (cm) | Volume (cm3) | Upper Side Area (cm2) | No. of Boxes |
|---|
| Low box | 15 | 20 × 30 × 15 | 0.009 | 600 | 7 |
| High box | 25 | 30 × 40 × 25 | 0.03 | 1200 | 6 |
| Extra-high box | 30 | 25 × 40 × 30 | 0.03 | 1000 | 1 |
Table 2.
Summary of SfM results: raw vs. optimized sparse cloud. (Note: The raw sparse cloud represents the georeferenced sparse cloud, unfiltered, and excluding duplicated images. The iterative filtering process is integrated into the optimized sparse cloud. This table includes errors of control points and check points for both non-optimized and optimized sparse clouds. It also features the Root Mean Square Error (RMSE) of the linear model between Ground Control Points’ (GCPs) elevation values and predicted elevation values in both raw and optimized sparse clouds.).
Table 2.
Summary of SfM results: raw vs. optimized sparse cloud. (Note: The raw sparse cloud represents the georeferenced sparse cloud, unfiltered, and excluding duplicated images. The iterative filtering process is integrated into the optimized sparse cloud. This table includes errors of control points and check points for both non-optimized and optimized sparse clouds. It also features the Root Mean Square Error (RMSE) of the linear model between Ground Control Points’ (GCPs) elevation values and predicted elevation values in both raw and optimized sparse clouds.).
| Metrics | Raw Sparse Cloud | Optimized Sparse Cloud |
|---|
| Photograms (no.) | 24 | 24 |
| Tie points (no.) | 31,379 | 29,545 |
| RMS RE (px.) | 1.239 | 0.583 |
| RMSE control points xy (m) | 0.586 | 0.016 |
| RMSE control points z (m) | 4.242 | 0.004 |
| RMSE control points xyz (m) | 4.282 | 0.017 |
| RMSE check points xy (m) | 0.530 | 0.113 |
| RMSE check points z (m) | 4.351 | 0.076 |
| RMSE check points xyz (m) | 4.383 | 0.137 |
| Elevation RMSE (m) | 4.27 | 0.12 |
Table 3.
Overview of Dense Surface Point Cloud (DSPC) characteristics based on image quality resolution (ultrahigh quality (UHQ) and high quality (HQ)) and depth filtering levels (mild, moderate, and aggressive).
Table 3.
Overview of Dense Surface Point Cloud (DSPC) characteristics based on image quality resolution (ultrahigh quality (UHQ) and high quality (HQ)) and depth filtering levels (mild, moderate, and aggressive).
| Image Quality Resolution | UHQ | HQ |
|---|
| Depth Filter | Mild | Moderate | Aggressive | Mild | Moderate | Aggressive |
|---|
| Process time depth filter | 9 h 50 m | 9 h 44 m | 9 h 49 m | 2 h 48 m | 2 h 48 m | 2 h 49 m |
| Process time DSPC | 15 m 15 s | 14 m 36 s | 14 m 49 s | 3 m 48 s | 3 m 38 s | 3 m 41 s |
| No. points in DSPC raw | 15,122,249 | 15,033,502 | 14,966,021 | 3,725,108 | 3,707,369 | 3,694,205 |
| Var. in raw DSPC | 100% | −0.59% | −1.03% | −75.37% | −75.48% | −75.57% |
| No. of filtered points (confidence < 1) | 738,503 | 683,233 | 656,298 | 112,430 | 103,486 | 103,077 |
| No. points in filtered DSPC | 14,383,746 | 14,350,269 | 14,309,723 | 3,612,678 | 3,603,883 | 3,591,128 |
Table 4.
Overview of elevation accuracy and point density in 6 Dense Surface Point Cloud (DSPC) versions. These versions were generated based on varying image quality resolution (ultrahigh quality (UHQ) and high quality (HQ)) and depth filter levels (mild, moderate, and aggressive). The table includes R2 values, Mean Absolute Error (MAE) from regression models comparing GNSS validation point elevation values to predicted elevations on 14 reference boxes, Standard Deviation, and point density metrics.
Table 4.
Overview of elevation accuracy and point density in 6 Dense Surface Point Cloud (DSPC) versions. These versions were generated based on varying image quality resolution (ultrahigh quality (UHQ) and high quality (HQ)) and depth filter levels (mild, moderate, and aggressive). The table includes R2 values, Mean Absolute Error (MAE) from regression models comparing GNSS validation point elevation values to predicted elevations on 14 reference boxes, Standard Deviation, and point density metrics.
| Image Quality Resolution | Depth Filter | R2 | Elevation MAE (m) | SD (m) | Density (pts/m2) |
|---|
| | Mild | 0.9914 | 0.056 | 0.007 | 2022.81 |
| UHQ | Moderate | 0.9907 | 0.059 | 0.005 | 2010.56 |
| | Aggressive | 0.9911 | 0.059 | 0.006 | 2011.95 |
| | Mild | 0.9904 | 0.055 | 0.006 | 530.65 |
| HQ | Moderate | 0.9909 | 0.056 | 0.007 | 544.17 |
| | Aggressive | 0.9906 | 0.056 | 0.006 | 548.11 |
Table 5.
Analysis of variance (one-way ANOVA) for elevation and point density of reference objects across different image quality resolution levels (UHQ and HQ) and depth filters (mild, moderate, and aggressive) for the 6 DSPC versions. Note: * denotes p < 0.05; ** denotes p < 0.01; *** denotes p < 0.001.
Table 5.
Analysis of variance (one-way ANOVA) for elevation and point density of reference objects across different image quality resolution levels (UHQ and HQ) and depth filters (mild, moderate, and aggressive) for the 6 DSPC versions. Note: * denotes p < 0.05; ** denotes p < 0.01; *** denotes p < 0.001.
| Filters Parameters | Elevation Error (m) | Density (pts/m2) |
|---|
| F | p-Value | F | p-Value |
|---|
| Image quality resolution | 0.042 | 0.838 | 5902 | <2 × 10−1 6 *** |
| Image quality resolution and depth filter | 0.009 | 1 | 1120 | <2 × 10−1 6 *** |
Table 6.
Analysis of the elevation accuracy of selected DSMs and DTMs, including the estimated R2 of the linear regression between observed GNSS validation points elevation values and predicted DSM and DTM elevation values and standard linear regression metrics such as MAE.
Table 6.
Analysis of the elevation accuracy of selected DSMs and DTMs, including the estimated R2 of the linear regression between observed GNSS validation points elevation values and predicted DSM and DTM elevation values and standard linear regression metrics such as MAE.
| DEMs | Image Quality Resolution | Depth Filter | Maxdist (mm) | Number of Samples | R2 | Elevation MAE (m) |
|---|
| DSM | UHQ | Mild | - | 12 | 0.9912 | 0.057 |
| DTM | UHQ | Mild | 5 | 45 | 0.9992 | 0.048 |
Table 7.
Summary of height and volume measurement MAE accuracy estimated over the reference boxes and derived from the Canopy Height Model versions (true surface box (TSB), surface box photointerpreted orthomosaic (SBPO), and surface box photointerpreted canopy height (SBPCH).
Table 7.
Summary of height and volume measurement MAE accuracy estimated over the reference boxes and derived from the Canopy Height Model versions (true surface box (TSB), surface box photointerpreted orthomosaic (SBPO), and surface box photointerpreted canopy height (SBPCH).
| CHM Versions | Height MAE (cm) | Volume MAE (cm3) |
|---|
| True surface box (TSB) | 1.20 | 909.30 |
| Surface box photointerpreted orthomosaic (SBPO) | 1.88 | 8899.41 |
| Surface box photointerpreted canopy height (SBPCH) | 6.43 | 17,552.44 |


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}