Soil Water Extraction Monitored Per Plot Across a Field Experiment Using Repeated Electromagnetic Induction Surveys


Abstract
:1. Introduction
2. Materials and Methods
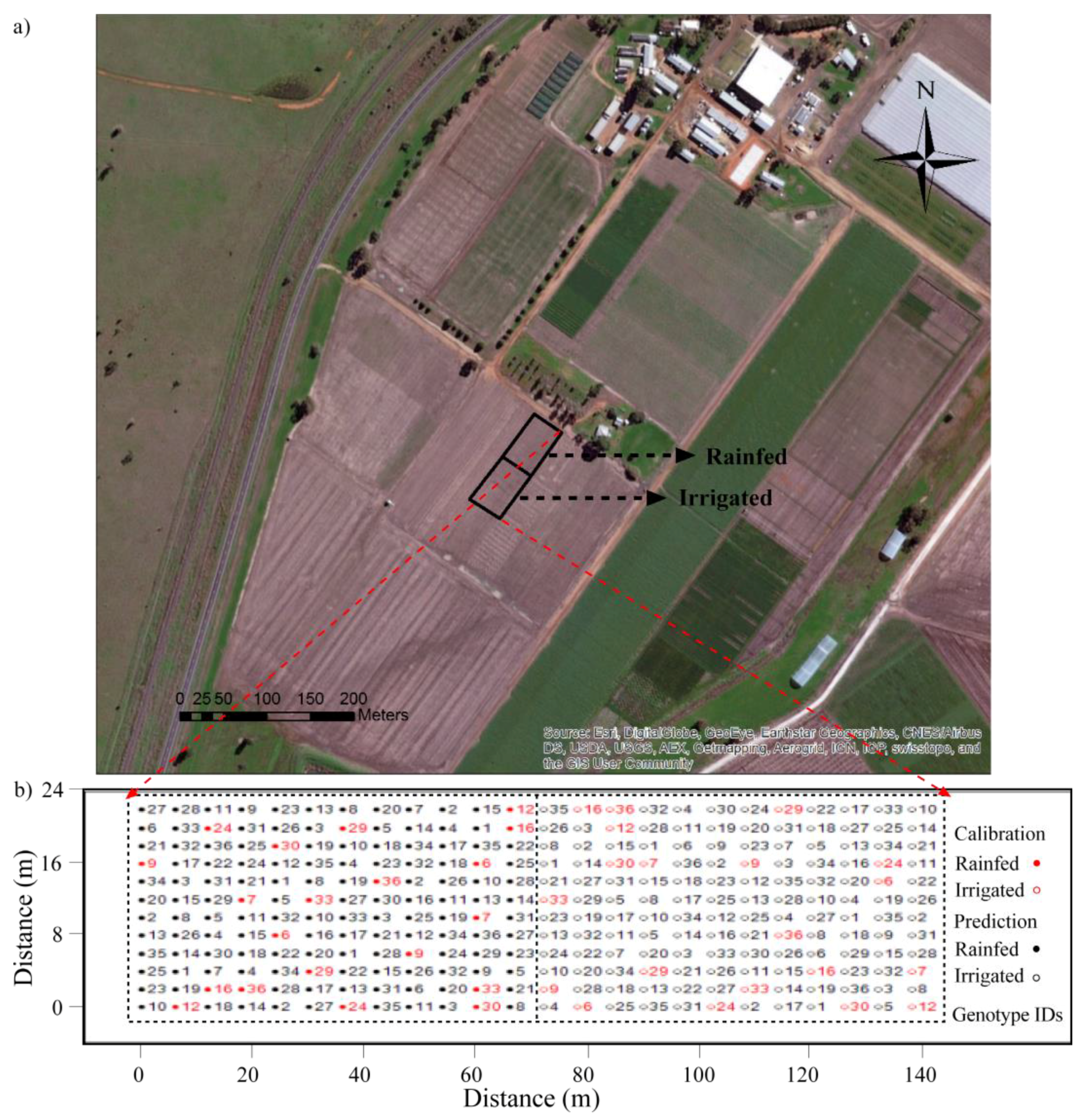
2.1. Study Site
2.2. Geonics EM38 Configuration
2.3. Time-Lapse EM38 Surveys
2.4. Collection of Neutron Probe Measurements
2.5. Inversions of EM38 Data
2.6. Predicting θ Using an Empirical Model
2.7. Estimating θ Dynamics in 3-Dimensions
2.8. Comparing Water Use of Different Genotypes
3. Results and Discussion
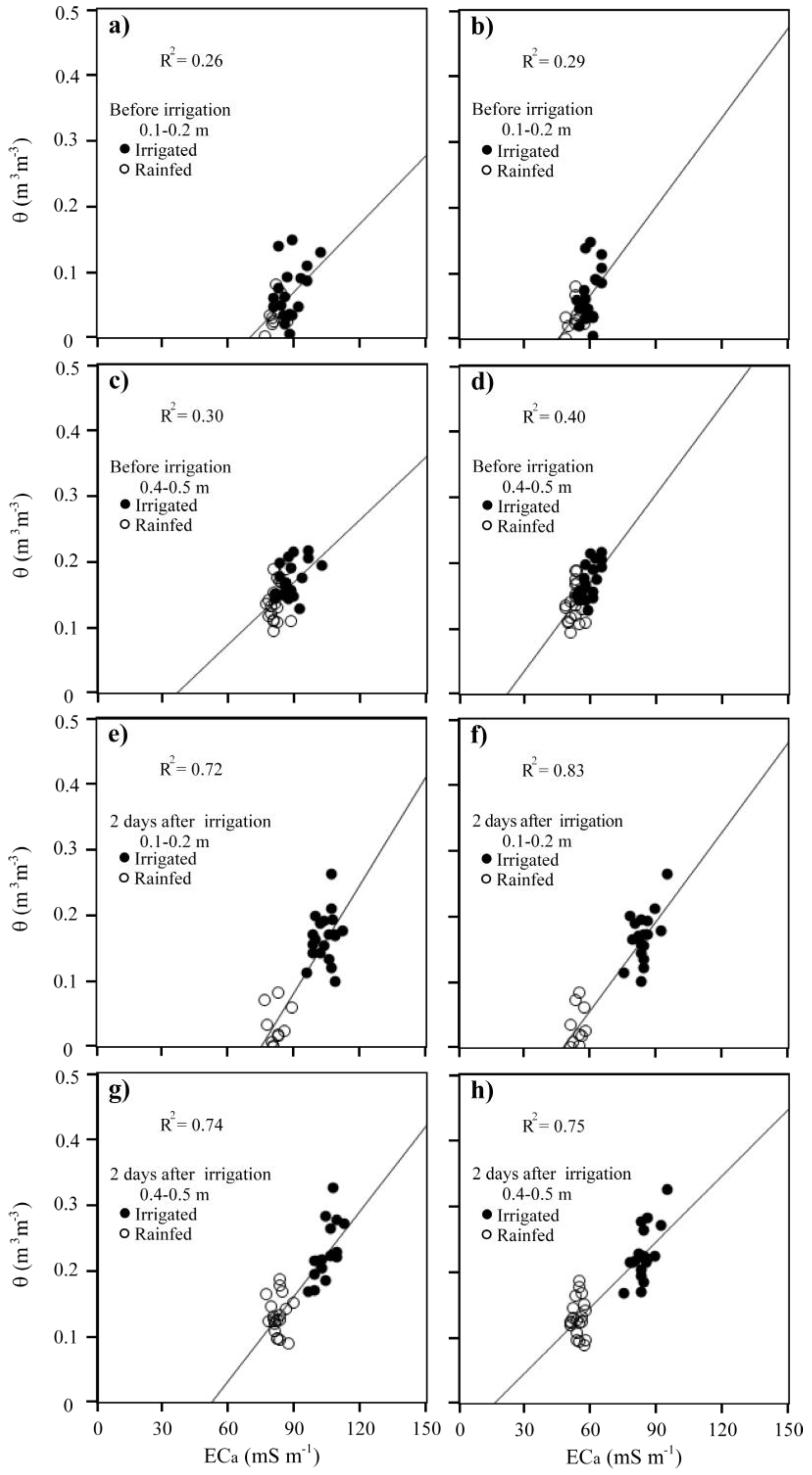
3.1. Correlation Between θ and ECa
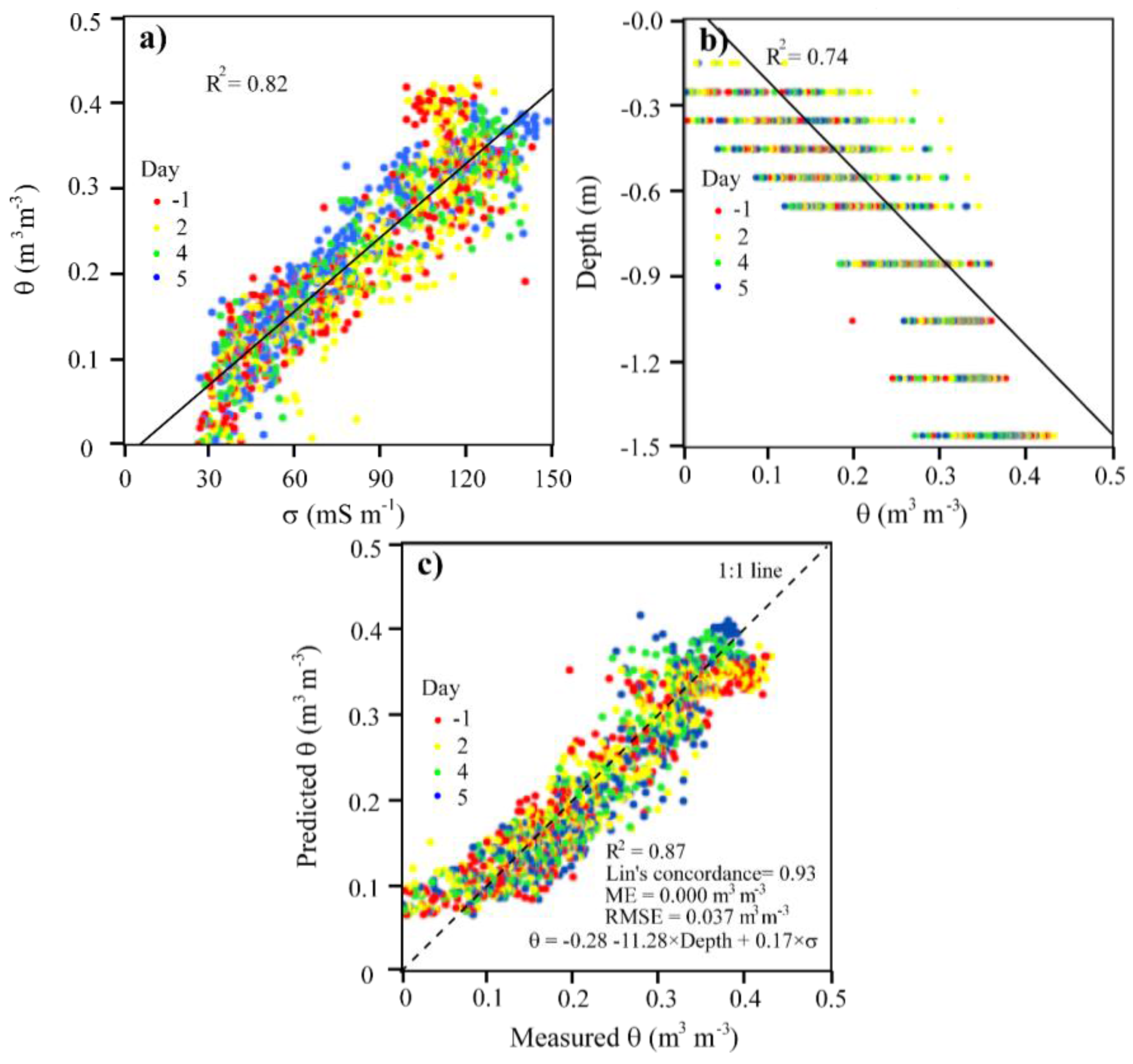
3.2. Correlation Between θ with σ and Soil Depth
3.3. The Empirical Model of θ
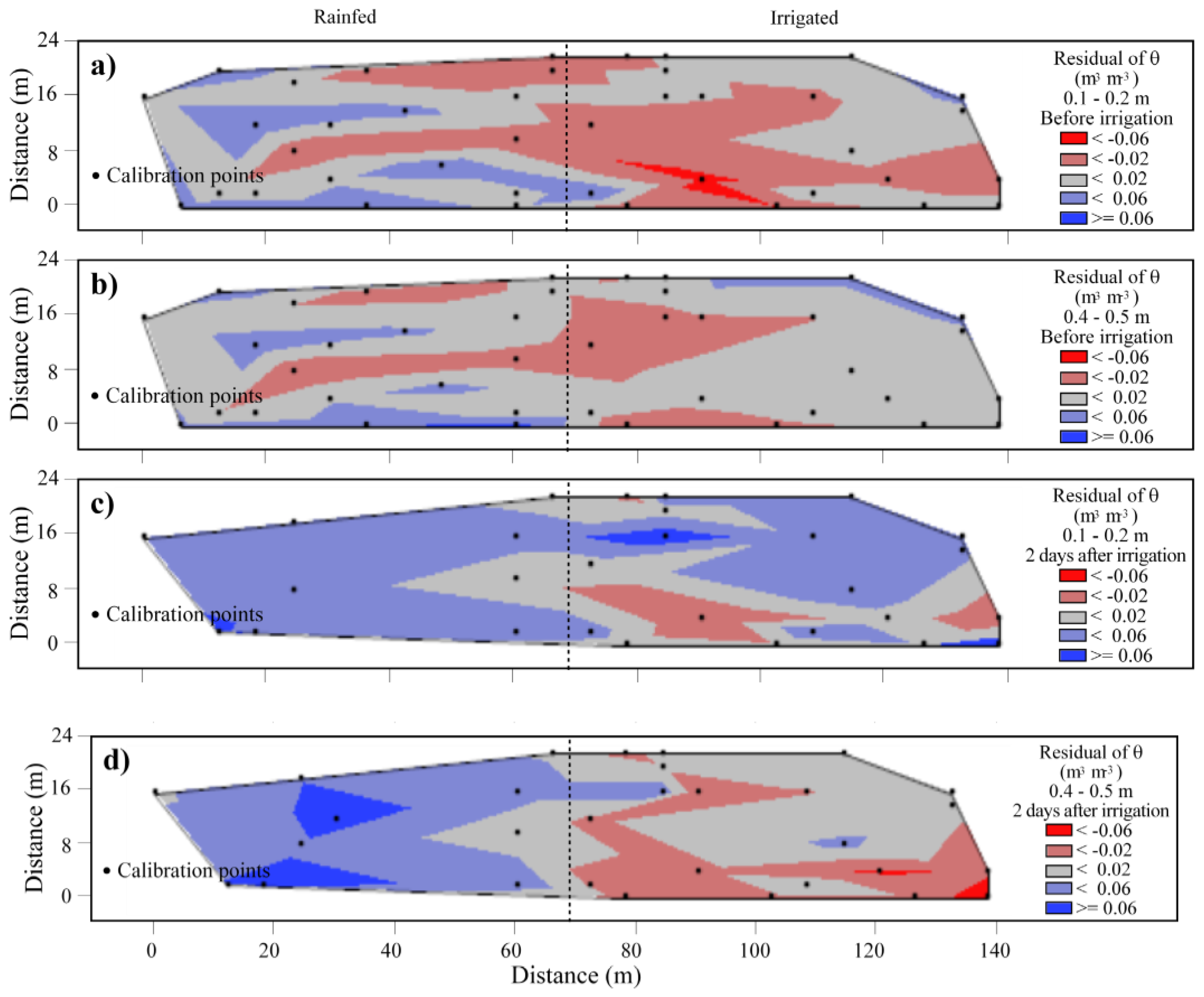
3.4. Spatial Distribution of Model Residuals Across the Field
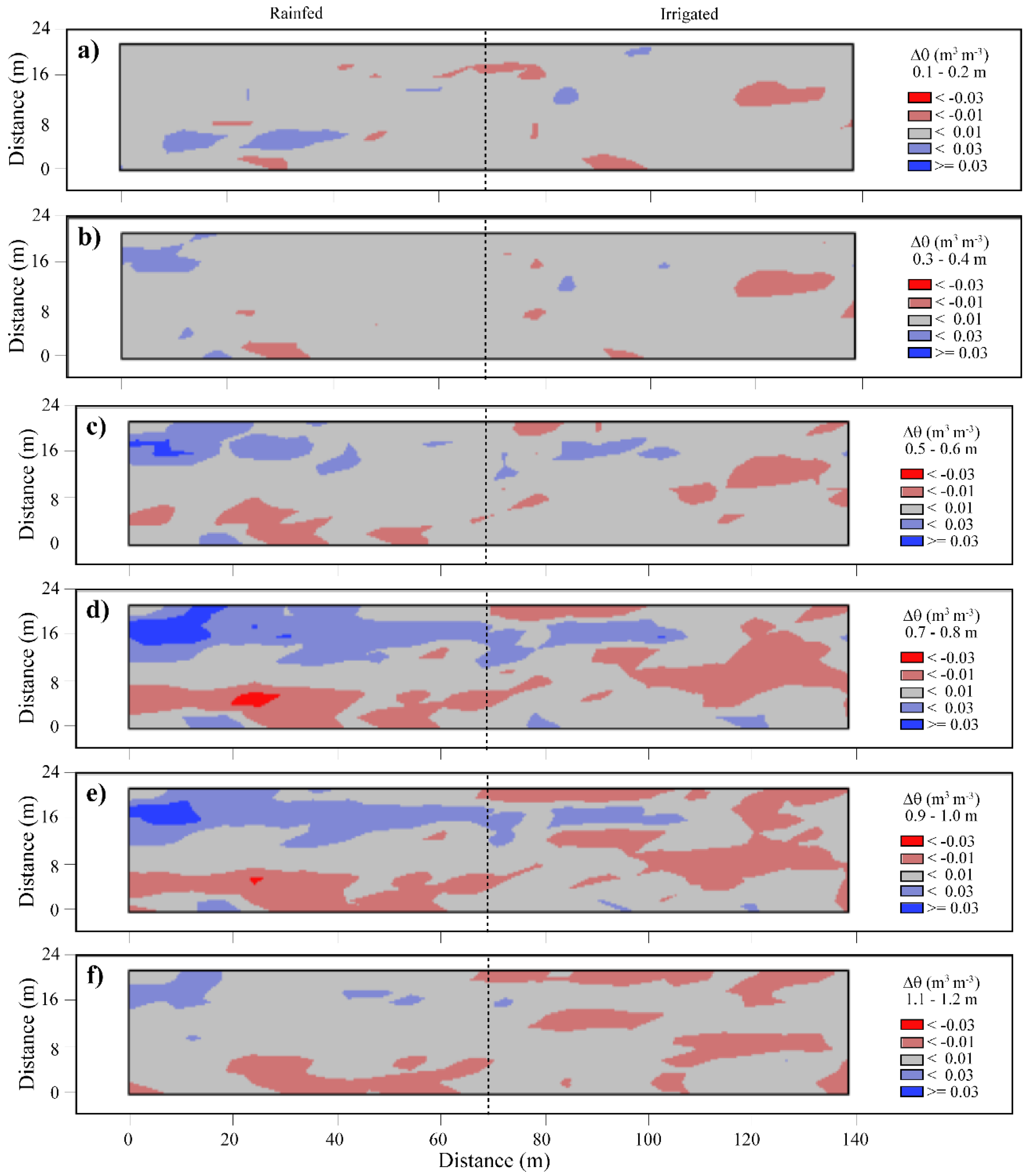
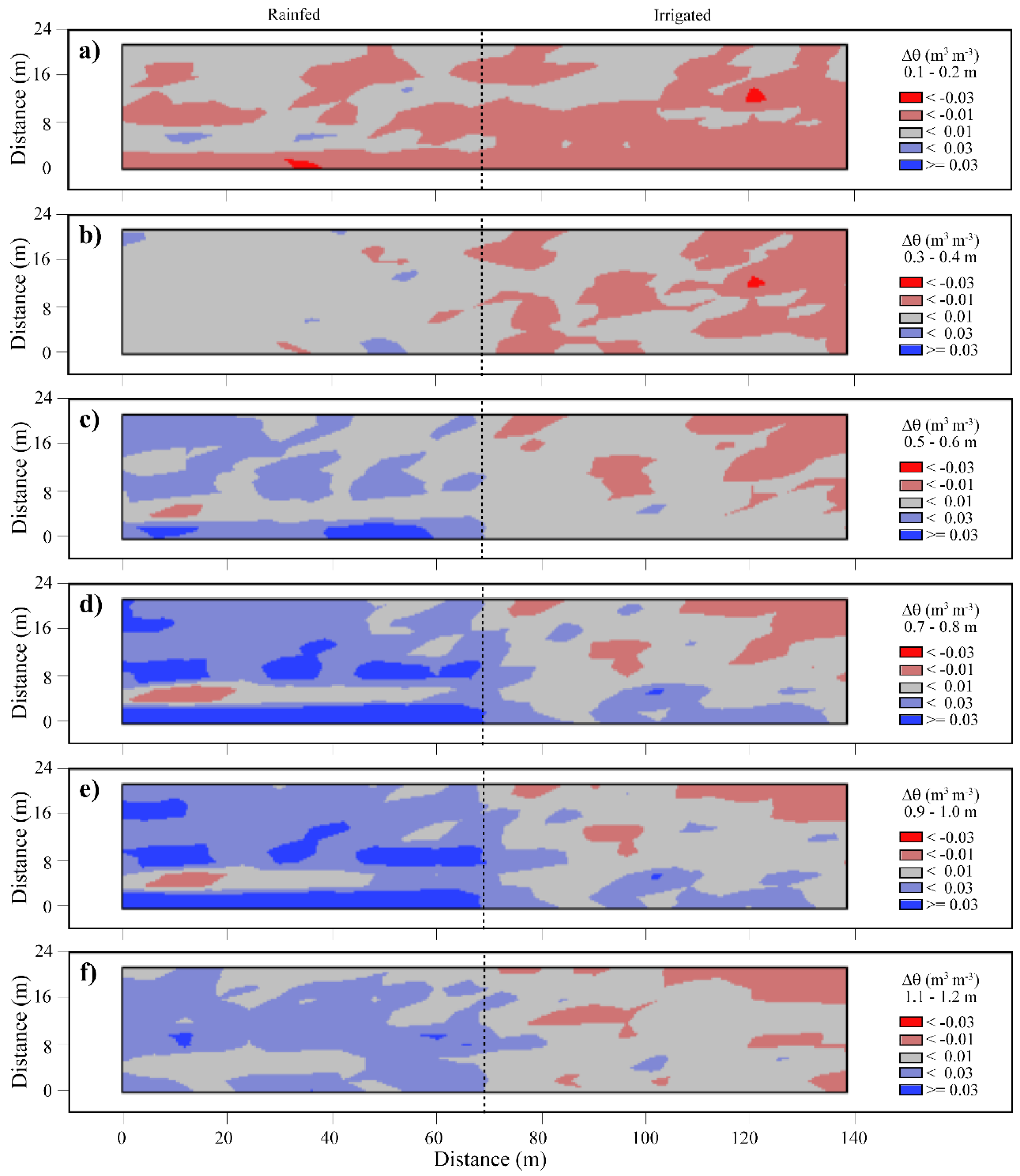
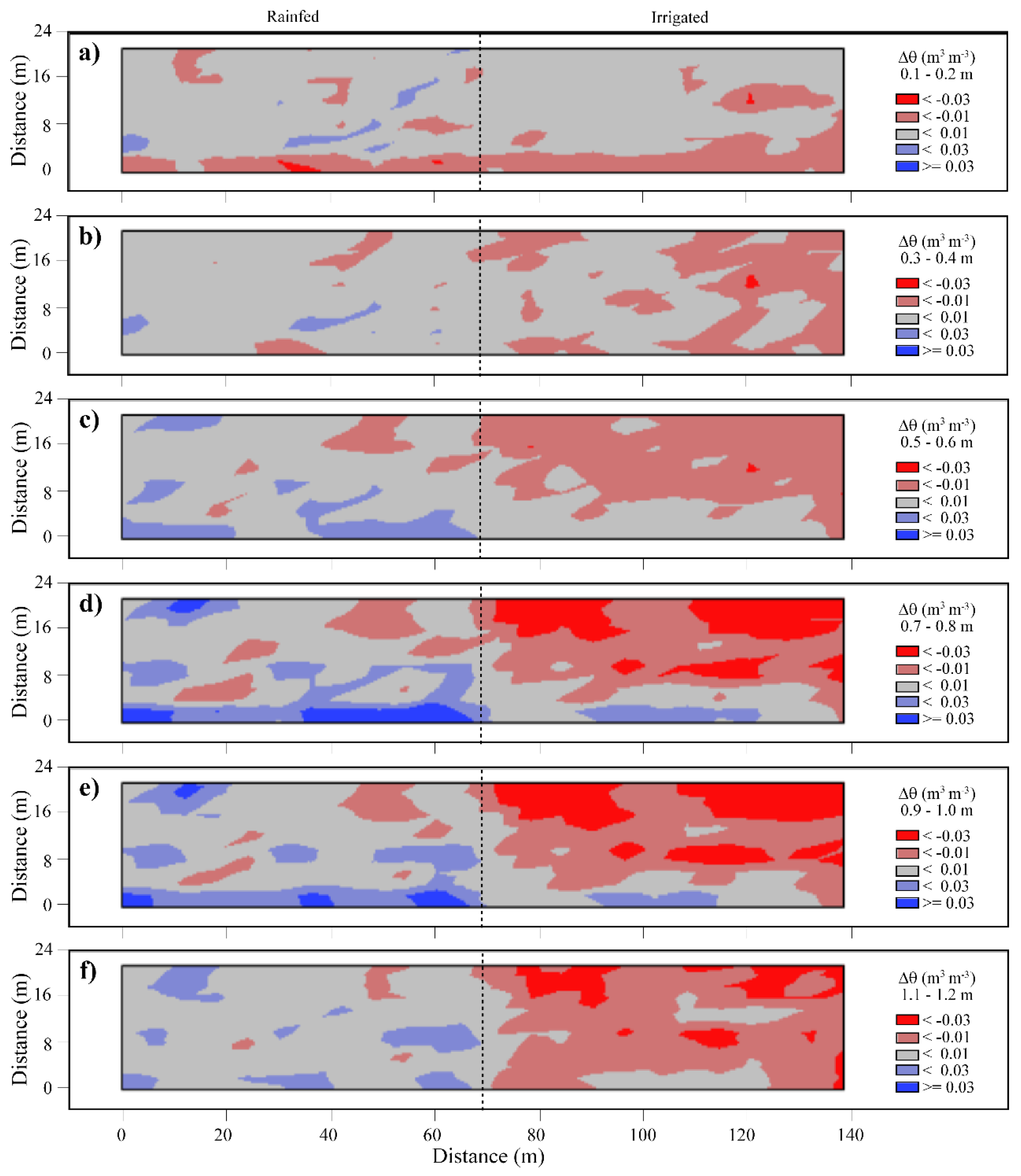
3.5. Predicted θ Dynamics Across the Field
3.6. Water Balance Across the Field
3.7. Variation in Chickpea Genotypic and Growth-Dependent Water Use
3.8. Caveats for Soil and Plant Scientists
- (1)
- EMI surveys: repeated EMI surveys should be taken before and after the irrigation/rainfall events to ensure a large range of apparent electrical conductivity (ECa) as well as θ. EMI surveys should be taken at similar ambient temperature. If a significant drift in soil temperature occurs, ECa data need to be corrected to a standard temperature prior to further analysis using different correction formulae [18,34].
- (2)
- Soil moisture measurements: real-time θ measurements are required to establish models between θ and ECa data. This can be done using a number of geophysical instruments, including neutron probes, time domain reflectometry, and capacitance probes [5]. Attention should be taken to minimise the disruption of soil profiles.
- (3)
- Model construction: it is suggested that EMI data should be inverted to calculate the depth-specific electrical conductivity (σ) for establishing a universal model between θ and σ. Examples of the inversion algorithms and model calibration approaches that have been successfully applied in the field can be found in [16,18].
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Reynolds, M.; Tuberosa, R. Translational research impacting on crop productivity in drought-prone environments. Curr. Opin. Plant. Bio. 2008, 11, 171–179. [Google Scholar] [CrossRef] [PubMed]
- Blum, A. Drought resistance, water-use efficiency, and yield potential—Are they compatible, dissonant, or mutually exclusive? Aust. J. Agric. Res. 2005, 56, 1159–1168. [Google Scholar] [CrossRef]
- Gooley, L.; Huang, J.; Page, D.; Triantafilis, J. Digital soil mapping of available water content using proximal and remotely sensed data. Soil Use Manag. 2014, 30, 139–151. [Google Scholar] [CrossRef]
- Jones, H.G. Monitoring plant and soil water status: Established and novel methods revisited and their relevance to studies of drought tolerance. J. Exp. Bot. 2006, 58, 119–130. [Google Scholar] [CrossRef] [PubMed]
- Vereecken, H.; Huisman, J.A.; Pachepsky, Y.; Montzka, C.; Van Der Kruk, J.; Bogena, H.; Weihermüller, L.; Herbst, M.; Martinez, G.; Vanderborght, J. On the spatio-temporal dynamics of soil moisture at the field scale. J. Hydrol. 2014, 516, 76–96. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M. Application of soil electrical conductivity to precision agriculture: Theory, principles, and guidelines. Agron J. 2003, 95, 455–471. [Google Scholar] [CrossRef]
- Doolittle, J.A.; Brevik, E.C. The use of electromagnetic induction techniques in soils studies. Geoderma 2014, 223, 33–45. [Google Scholar] [CrossRef]
- Wong, M.T.F.; Asseng, S. Determining the causes of spatial and temporal variability of wheat yields at sub-field scale using a new method of upscaling a crop model. Plant Soil 2006, 283, 203–215. [Google Scholar] [CrossRef]
- Aragüés, R.; Guillén, M.; Royo, A. Five-year growth and yield response of two young olive cultivars (Olea europaea L., cvs. Arbequina and Empeltre) to soil salinity. Plant Soil 2010, 334, 423–432. [Google Scholar] [CrossRef] [Green Version]
- Li, H.Y.; Shi, Z.; Webster, R.; Triantafilis, J. Mapping the three-dimensional variation of soil salinity in a rice-paddy soil. Geoderma 2013, 195, 31–41. [Google Scholar] [CrossRef]
- Coppola, A.; Smettem, K.; Ajeel, A.; Saeed, A.; Dragonetti, G.; Comegna, A.; Lamaddalena, A.; Vacca, A. Calibration of an electromagnetic induction sensor with time-domain reflectometry data to monitor rootzone electrical conductivity under saline water irrigation. Eur. J. Soil Sci. 2016, 67, 737–748. [Google Scholar] [CrossRef]
- Sheets, K.R.; Hendrickx, J.M. Noninvasive soil water content measurement using electromagnetic induction. Water Resour. Res. 1995, 31, 2401–2409. [Google Scholar] [CrossRef]
- Robinson, D.A.; Abdu, H.; Lebron, I.; Jones, S.B. Imaging of hill-slope soil moisture wetting patterns in a semi-arid oak savanna catchment using time-lapse electromagnetic induction. J. Hydrol. 2012, 416, 39–49. [Google Scholar] [CrossRef] [Green Version]
- Martini, E.; Wollschläger, U.; Kögler, S.; Behrens, T.; Dietrich, P.; Reinstorf, F.; Schmidt, K.; Weiler, M.; Werban, U.; Zacharias, S. Spatial and temporal dynamics of hillslope-scale soil moisture patterns: Characteristic states and transition mechanisms. Vadose Zone J. 2015, 14. [Google Scholar] [CrossRef]
- Von Hebel, C.; Rudolph, S.; Mester, A.; Huisman, J.A.; Kumbhar, P.; Vereecken, H.; van der Kruk, J. Three-dimensional imaging of subsurface structural patterns using quantitative large-scale multiconfiguration electromagnetic induction data. Water Resour. Res. 2014, 50, 2732–2748. [Google Scholar] [CrossRef]
- Huang, J.; Scudiero, E.; Clary, W.; Corwin, D.L.; Triantafilis, J. Time-lapse monitoring of soil water content using electromagnetic conductivity imaging. Soil Use Manag. 2017, 33, 191–204. [Google Scholar] [CrossRef]
- Hedley, C.B.; Roudier, P.; Yule, I.J.; Ekanayake, J.; Bradbury, S. Soil water status and water table depth modelling using electromagnetic surveys for precision irrigation scheduling. Geoderma 2013, 199, 22–29. [Google Scholar] [CrossRef]
- Huang, J.; McBratney, A.B.; Minasny, B.; Triantafilis, J. Monitoring and modelling soil water dynamics using electromagnetic conductivity imaging and the ensemble Kalman filter. Geoderma 2017, 285, 76–93. [Google Scholar] [CrossRef]
- Farahani, H.J.; Buchleiter, G.W.; Brodahl, M.K. Characterization of apparent soil electrical conductivity variability in irrigated sandy and non-saline fields in Colorado. Am. Soc. Agric. Eng. 2005, 48, 155–168. [Google Scholar] [CrossRef]
- Shanahan, P.W.; Binley, A.; Whalley, W.R.; Watts, C.W. The use of electromagnetic induction to monitor changes in soil moisture profiles beneath different wheat genotypes. Soil Sci. Soc. Am. J. 2015, 79, 459–466. [Google Scholar] [CrossRef]
- Altdorff, D.; von Hebel, C.; Borchard, N.; van der Kruk, J.; Bogena, H.R.; Vereecken, H.; Huisman, J.A. Potential of catchment-wide soil water content prediction using electromagnetic induction in a forest ecosystem. Environ. Earth Sci. 2017, 76, 111. [Google Scholar] [CrossRef]
- Martini, E.; Werban, U.; Zacharias, S.; Pohle, M.; Dietrich, P.; Wollschläger, U. Repeated electromagnetic induction measurements for mapping soil moisture at the field scale: Validation with data from a wireless soil moisture monitoring network. Hydrol. Earth Syst. Sci. 2017, 21, 495–513. [Google Scholar] [CrossRef]
- Stanley, J.N.; Lamb, D.W.; Falzon, G.; Schneider, D.A. Apparent electrical conductivity (ECa) as a surrogate for neutron probe counts to measure soil moisture content in heavy clay soils (Vertosols). Soil Res. 2014, 52, 373–378. [Google Scholar] [CrossRef]
- Weatherzone. Available online: http://www.weatherzone.com.au/climate/station.jsp?lt=site&lc=53030 (accessed on 27 January 2018).
- Isbell, R. The Australian Soil Classification; CSIRO publishing: Melbourne, Australia, 2002. [Google Scholar]
- McNeill, J.D. Geonics EM38 Ground Conductivity Meter: EM38 Operating Manual; Geonics Ltd.: Mississauga, ON, Canada, 1990. [Google Scholar]
- Borchers, B.; Uram, T.; Hendrickx, J.M. Tikhonov regularization of electrical conductivity depth profiles in field soils. Soil Sci. Soc. Am. J. 1997, 61, 1004–1009. [Google Scholar] [CrossRef]
- Hendrickx, J.M.H.; Borchers, B.; Corwin, D.L.; Lesch, S.M.; Hilgendorf, A.C.; Schlue, J. Inversion of soil conductivity profiles from electromagnetic induction measurements. Soil Sci. Soc. Am. J. 2002, 66, 673–685. [Google Scholar] [CrossRef]
- Huang, J.; Taghizadeh-Mehrjardi, R.; Minasny, B.; Triantafilis, J. Modeling soil salinity along a hillslope in Iran by inversion of EM38 data. Soil Sci. Soc. Am. J. 2015, 79, 1142–1153. [Google Scholar] [CrossRef]
- Reedy, R.C.; Scanlon, B.R. Soil water content monitoring using electromagnetic induction. J. Geotech. Geoenviron. 2003, 129, 1028–1039. [Google Scholar] [CrossRef]
- Brevik, E.C.; Fenton, T.E.; Horton, R. Effect f daily soil temperature fluctuations on soil electrical conductivity as measured with the Geonics® EM-38. Precis. Agric. 2004, 5, 143–150. [Google Scholar] [CrossRef]
- Allred, B.J.; Ehsani, M.R.; Saraswat, D. The impact of temperature and shallow hydrologic conditions on the magnitude and spatial pattern consistency of electromagnetic induction measured soil electrical conductivity. Trans. Am. Soc. Agric. Eng. 2005, 48, 2123–2135. [Google Scholar] [CrossRef]
- Tromp-van Meerveld, H.J.; McDonnell, J.J. Assessment of multi-frequency electromagnetic induction for determining soil moisture patterns at the hillslope scale. J. Hydrol. 2009, 368, 56–67. [Google Scholar] [CrossRef]
- Ma, R.; McBratney, A.; Whelan, B.; Minasny, B.; Short, M. Comparing temperature correction models for soil electrical conductivity measurement. Precis. Agric. 2011, 12, 55–66. [Google Scholar] [CrossRef]
- Robinet, J.; von Hebel, C.; Govers, G.; van der Kruk, J.; Minella, J.P.G.; Schlesner, A.; Ameijeiras-Mariño, Y.; Vanderborght, J. Spatial variability of soil water content and soil electrical conductivity across scales derived from Electromagnetic Induction and Time Domain Reflectometry. Geoderma 2018, 314, 160–174. [Google Scholar] [CrossRef]
- Huang, J.; Minasny, B.; Whelan, B.M.; McBratney, A.B.; Triantafilis, J. Temperature-dependent hysteresis effects on DUALEM instruments. Comput. Electron. Agric. 2017, 132, 76–85. [Google Scholar] [CrossRef]
- Sudduth, K.A.; Drummond, S.T.; Kitchen, N.R. Accuracy issues in electromagnetic induction sensing of soil electrical conductivity for precision agriculture. Comput. Electron. Agric. 2001, 31, 239–264. [Google Scholar] [CrossRef]
- Monteiro Santos, F.A. 1-D laterally constrained inversion of EM34 profiling data. J. Appl. Geophys. 2004, 56, 123–134. [Google Scholar] [CrossRef]
- Lark, R.M.; Cullis, B.R.; Welham, S.J. On spatial prediction of soil properties in the presence of a spatial trend: The empirical best linear unbiased predictor (E-BLUP) with REML. Eur. J. Soil Sci. 2006, 57, 787–799. [Google Scholar] [CrossRef]
- Ribeiro, P.J., Jr.; Diggle, P.J. geoR: A package for geostatistical analysis. R News 2001, 1, 14–18. [Google Scholar]
- Lin, L.I.K. A concordance correlation coefficient to evaluate reproducibility. Biometrics 1989, 45, 255–268. [Google Scholar] [CrossRef] [PubMed]
- Arslan, A.; Razzouk, A.K.; Al-Ain, F. The performance and radiation exposure of some neutron probes in measuring the water content of the topsoil layer. Soil Res. 1997, 35, 1397–1407. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M.; Farahani, H. Theoretical insight on the measurement of soil electrical conductivity. In Handbook of Agricultural Geophysics; Allred, B.J., Daniels, J.J., Ehsani, M.R., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 59–83. [Google Scholar]
- Martínez, G.; Vanderlinden, K.; Giráldez, J.V.; Espejo, A.J.; Muriel, J.L. Field-scale soil moisture pattern mapping using electromagnetic induction. Vadose Zone J. 2010, 9, 871–881. [Google Scholar] [CrossRef]
- Martínez, G.; Huang, J.; Vanderlinden, K.; Giráldez, J.V.; Triantafilis, J. Potential to predict depth-specific soil water content beneath an olive tree using electromagnetic conductivity imaging. Soil Use Manag. 2018, in press. [Google Scholar]
- Siqueira, M.; Katul, G.; Porporato, A. Onset of water stress, hysteresis in plant conductance, and hydraulic lift: Scaling soil water dynamics from millimeters to meters. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Bramley, H.; Bitter, R.; Zimmermann, G.; Zimmermann, U. Simultaneous recording of diurnal changes in leaf turgor pressure and stem water status of bread wheat reveal variation in hydraulic mechanisms in response to drought. Funct. Plant Boil. 2015, 42, 1001–1009. [Google Scholar] [CrossRef]
- Smith, R.J.; Raine, S.R.; Minkevich, J. Irrigation application efficiency and deep drainage potential under surface irrigated cotton. Agric. Water Manag. 2005, 71, 117–130. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth | Rainfed | Irrigated | ||||||
|---|---|---|---|---|---|---|---|---|
| Days 1–3 | Days 3–9 | Days 9–12 | Days 1–12 | Days 1–3 | Days 3–9 | Days 9–12 | Days 1–12 | |
| 0.1 | −0.9 | 0.5 | −0.4 | −0.2 | −1.1 | 0.5 | −0.7 | |
| 0.1 | −0.9 | 0.5 | −0.4 | −0.2 | −1.1 | 0.5 | −0.7 | |
| 0.1 | −0.5 | 0.2 | −0.3 | −0.2 | −1.0 | 0.3 | −0.9 | |
| 0.1 | −0.1 | −0.2 | −0.1 | −0.2 | −0.8 | 0.0 | −1.0 | |
| 0.2 | 0.3 | −0.5 | 0.0 | −0.2 | −0.7 | −0.2 | −1.1 | |
| 0.2 | 1.0 | −1.0 | 0.2 | −0.3 | −0.3 | −0.7 | −1.3 | |
| 0.3 | 1.6 | −1.4 | 0.4 | −0.3 | 0.1 | −1.3 | −1.5 | |
| 0.3 | 2.2 | −1.9 | 0.6 | −0.4 | 0.4 | −1.8 | −1.8 | |
| 0.2 | 2.2 | −1.8 | 0.6 | −0.4 | 0.5 | −2.0 | −1.9 | |
| 0.2 | 2.1 | −1.8 | 0.5 | −0.5 | 0.6 | −2.1 | −2.0 | |
| 0.1 | 2.1 | −1.7 | 0.5 | −0.6 | 0.7 | −2.2 | −2.1 | |
| 0.0 | 1.3 | −1.0 | 0.2 | −0.6 | 0.2 | −1.6 | −2.0 | |
| 1.7 | 10.4 | −10.2 | 1.9 | −4.1 | −2.4 | −10.5 | −17.0 | |
| Rank | Genotype (Rainfed) | Fixed Effect Coefficient | Genotype (Irrigated) | Fixed Effect Coefficient |
|---|---|---|---|---|
| 1 | 6 | −0.94 | 34 | −0.85 |
| 2 | 13 | −0.36 | 7 | −0.76 |
| 3 | 11 | −0.28 | 29 | −0.65 |
| 4 | 32 | −0.27 | 3 | −0.57 |
| 5 | 28 | −0.12 | 4 | −0.54 |
| 6 | 9 | −0.06 | 8 | −0.49 |
| 7 | 31 | −0.05 | 21 | −0.45 |
| 8 | 25 | 0.06 | 24 | −0.43 |
| 9 | 10 | 0.10 | 15 | −0.42 |
| 10 | 20 | 0.11 | 26 | −0.41 |
| 11 | 5 | 0.12 | 18 | −0.40 |
| 12 | 22 | 0.20 | 36 | −0.38 |
| 13 | 14 | 0.22 | 14 | −0.38 |
| 14 | 2 | 0.28 | 25 | −0.38 |
| 15 | 33 | 0.31 | 35 | −0.35 |
| 16 | 35 | 0.33 | 16 | −0.31 |
| 17 | 23 | 0.34 | 23 | −0.27 |
| 18 | 17 | 0.35 | 5 | −0.19 |
| 19 | 18 | 0.36 | 30 | −0.18 |
| 20 | 29 | 0.36 | 12 | −0.18 |
| 21 | 12 | 0.38 | 1 | −0.17 |
| 22 | 16 | 0.39 | 27 | −0.13 |
| 23 | 15 | 0.41 | 31 | −0.12 |
| 24 | 30 | 0.43 | 20 | −0.08 |
| 25 | 19 | 0.48 | 11 | −0.07 |
| 26 | 21 | 0.48 | 2 | −0.01 |
| 27 | 3 | 0.60 | 28 | 0.04 |
| 28 | 26 | 0.64 | 22 | 0.05 |
| 29 | 27 | 0.67 | 17 | 0.12 |
| 30 | 24 | 0.70 | 32 | 0.18 |
| 31 | 34 | 0.98 | 9 | 0.20 |
| 32 | 4 | 1.03 | 33 | 0.24 |
| 33 | 8 | 1.17 | 19 | 0.27 |
| 34 | 7 | 1.22 | 6 | 0.31 |
| 35 | 1 | 1.28 | 13 | 0.43 |
| 36 | 36 | 1.38 | 10 | 0.49 |
| Depth | 6 | 34 | 36 | 10 | ||||
|---|---|---|---|---|---|---|---|---|
| Rainfed | Irrigated | Rainfed | Irrigated | Rainfed | Irrigated | Rainfed | Irrigated | |
| 0.3 | −1.0 | −0.5 | −0.4 | −1.4 | −0.3 | −0.4 | −1.1 | |
| 0.3 | −1.0 | −0.5 | −0.4 | −1.4 | −0.3 | −0.4 | −1.1 | |
| 0.3 | −1.0 | −0.5 | −0.7 | −1.0 | −0.6 | −0.1 | −1.3 | |
| 0.3 | −1.0 | −0.6 | −1.0 | −0.6 | −0.8 | 0.1 | −1.4 | |
| 0.4 | −1.0 | −0.6 | −1.3 | −0.3 | −1.1 | 0.3 | −1.6 | |
| 0.4 | −1.0 | −0.7 | −1.8 | 0.3 | −1.5 | 0.6 | −1.7 | |
| 0.4 | −0.9 | −0.7 | −2.4 | 0.8 | −2.0 | 0.9 | −1.8 | |
| 0.4 | −0.9 | −0.7 | −2.9 | 1.4 | −2.4 | 1.2 | −2.0 | |
| 0.1 | −1.0 | −0.6 | −3.0 | 1.6 | −2.6 | 1.2 | −1.9 | |
| −0.1 | −1.1 | −0.4 | −3.2 | 1.7 | −2.7 | 1.2 | −1.8 | |
| −0.4 | −1.2 | −0.3 | −3.3 | 1.9 | −2.9 | 1.2 | −1.7 | |
| −0.8 | −1.5 | −0.0 | −2.8 | 1.5 | −2.5 | 0.8 | −1.4 | |
| −1.2 | −1.7 | 0.2 | −2.2 | 1.0 | −2.1 | 0.4 | −1.1 | |
| −1.6 | −2.0 | 0.5 | −1.6 | 0.5 | −1.7 | 0.0 | −0.9 | |
| −1.8 | −2.1 | 0.7 | −1.1 | 0.1 | −1.3 | −0.3 | −0.7 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Purushothaman, R.; McBratney, A.; Bramley, H. Soil Water Extraction Monitored Per Plot Across a Field Experiment Using Repeated Electromagnetic Induction Surveys. Soil Syst. 2018, 2, 11. https://doi.org/10.3390/soilsystems2010011
Huang J, Purushothaman R, McBratney A, Bramley H. Soil Water Extraction Monitored Per Plot Across a Field Experiment Using Repeated Electromagnetic Induction Surveys. Soil Systems. 2018; 2(1):11. https://doi.org/10.3390/soilsystems2010011
Chicago/Turabian StyleHuang, Jingyi, Ramamoorthy Purushothaman, Alex McBratney, and Helen Bramley. 2018. "Soil Water Extraction Monitored Per Plot Across a Field Experiment Using Repeated Electromagnetic Induction Surveys" Soil Systems 2, no. 1: 11. https://doi.org/10.3390/soilsystems2010011
APA StyleHuang, J., Purushothaman, R., McBratney, A., & Bramley, H. (2018). Soil Water Extraction Monitored Per Plot Across a Field Experiment Using Repeated Electromagnetic Induction Surveys. Soil Systems, 2(1), 11. https://doi.org/10.3390/soilsystems2010011