1. Introduction
Seismics, sonar, sodar, room and machine acoustics, ultrasound diagnosis and tomography depend on the calculation of sound paths in solid, liquid or gaseous media with heterogenous physical properties and complex geometry. Calculations are based on the well-known equations of motion listed by Augustin-Louis Cauchy 200 years ago:
In a continuum with stationary cartesian coordinates
and modulus of elasticity
E [Pa] a vectorial, elastic deflection
[m] causes the stress tensor
[Pa]. The local equilibrium of the tension force
[N/m
] due to stress tensor
and the inertial force
[N/m
] caused by the local acceleration
[m/s
] can be written as
By merging density
[kg/m
] and elasticity module
E sound velocity
[m/s] results and the governing wave equation for a homogeneous medium follows:
The partial differential equation (PDE) of the 2nd order (
2) delivers two mutually independent solutions. From the quadratic velocity term
can be seen that there are two waves travelling in opposite directions
and
, hence results the designation “Two-way wave equation”. Regardless of this ambiguity, irregular phantom effects occur in numerical seismic FE or FD wave calculations.
To eleminate these unwanted effects a great number of auxiliary equations have been developed, but no specific approach has been able to prevail. Because of the economic importance of the “One-Way”/“Two-Way” problem there also exist numerous patent applications beside the scientific literature [
1,
2,
3].
Due to the above mentioned difficulties the conventionally used equilibrium of forces was – initially hypothetically – replaced by an impulse equilibrium, i.e., more precisely by an impulse flow equilibrium [
4,
5]. Force and impulse are related and differ in one level of differentiation. Therefore, the unit of the impulse
[Hy = mkg/s = mass multiplied by velocity] was used. For a particle velocity
[m/s] the local specific impulse
[Hy/m
] follows. If velocity
propagates with the vectorial wave velocity
, the dyadic product
results in a kinetic impulse flow of the dimension [Hy/sm
], i.e.,
[Hy] per time and per area. On the other hand, an elastic deformation
induces the potential impulse flow
[Hy/sm
]. Wheras the Cauchy force equilibrium is applied to an infinitesimal volume element
, the equilibrium of kinetic and potential impulse flow in each field point
results in
This tensor equation being scalarly multiplied by the vectorial wave velocity
leads together with the known relationship
to a vectorial partial differential equation (PDE) of the 1st order respectively vectorial “One-Way wave equation”
Representing the equivalent to the force based 2nd order PDE wave Equation (
2). Mathematically, the 1st order PDE is much easier than the 2nd order PDE with the higher differentiation level. Also the wave propagation direction is determined. Force and impulse concept are compared below in
Table 1.
Because of their vector character the two wave Equations (
2) and (
4) are independent from the coordinate system and have to be transcribed to the selected coordinate system when used. Such a transcription is a mathematical formality.
While transcription to cartesian coordinates is problem-free, an unexpected conflict occurs for transcription to spherical coordinates. However, establishing the hypothetical radial Nabla variant beside the well-known conventional radial Nabla operator is a solution to the conflict. Hence, it is a further task to clarify the conflicting transcription of the vectorial one-way wave equation to spherical coordinates and to provide theoretical results that can be experimentally verified later. Therefore, calculation is restricted to spherical wave propagation without the Legendre angular functions, i.e., . Interestingly the rather complicated hypothetical gradient leads to unexpected simplifications for – and only for – spherical waves with amplitude decrease. Thus, calculations remain elementary and a priori, neither bulky transcendental Bessel functions nor wattless imaginary near fields appear.
2. Method
According to the task and the restriction to central fields with purely radial functions
and
, spherical coordinates
are sufficient and only the radial operators gradient
, the divergence
and Laplace
are relevant in this context. These Nabla operators are used in all formulas, for the sake of certainty they are cited from [
6]. In
Table 2 all expressions are listed and connected with the
∇ symbol.
Obviously the following three different radial Nabla variants result:
Variants
and
being multiplied with each other fullfill the Laplace operator condition
, but due to
not the identity condition
. The calculated square root of Laplace
leads to a 3rd version fullfilling all conditions. With this justification the radial Nabla operator
is taken as hypothesis and compared with the conventional Nabla operators below in
Table 3. Control of the calculation by
aligns with conventional table set
and can be simplified to:
Thereby following derivatives are used: , .
Punctum saliens: For the
-differentiation of the special function
with the obligatory
amplitude decrease for a spherical wave
the
property is retained, even if the
differentiation is
n-times repeated:
To demonstrate this advantageous property,
Table 4 shows the specific impedance
on the left according to the conventional table rule
and on the right being calculated with the new hypothetical rule
. Subsequently the conventional calculation delivers a complex impedance, whereas the calculation with
yields a consistent, purely material-dependent real impedance
.
3. Results
An omnidirectionally unlimited three-dimensional continuum, in which solely longitudinal and transverse spatial waves but no surface waves can propagate, is taken as basis. In case of linearity and thanks to the orthogonality there is no mutual influence and the individual wave types can therefore be treated separately. With the labels
and
the longitudinal wave equation follows
By definition, the deflections
of the longitudinal wave lie in the direction of the wave propagation given by wave velocity
. Without loss of generality, with
and
the plane wave should run in coordinate direction
. Thus, the vectorial wave Equation (
11) is simplified to scalar wave Equation (
12) and the well-known solution (
13) of a planar wave is obtained (with
[rad/s] = circular frequency,
k [rad/m]=wave number,
):
For the spherical wave propagating in the radial direction
, the deflections
s also have the same direction and the scalar wave equation follows with the hypothetical Nabla operator
As can be verified by insertion, the solution is a spherical wave with
distance dependency of the amplitude (
amplitude factor [m
]):
In contrast, the conventional radial gradient
describes a plane wave travelling in
direction as shown in
Table 5. This is due to the fact that
has the analogue form as the cartesian gradient
.
In case of the transverse wave (T), deflection
and direction of propagation
are perpendicular to each another, i.e.,
. In this case, the well-known two-way wave equation can be factorized by means of the identity
−
and the assignments
und
:
and the vectorial one-way wave equation follows
Transversality of the Equation (
17) is proven by scalar multiplication with
:, i.e.,
Since a spar product with two equal vectors
is always zero follows
, i.e., the direction of the wave
and the deflection
are transversal. It can also be shown that
and
are perpendicular to each another. Finally, the scalar multiplication of Equation (
17) with
result in
i.e., the three vectors
,
and
form an orthogonal tripod. So the vectorial transverse one-way wave Equation (
17) can be expressed in scalar format as
Above calculations refer to the impulse related concept “one-way wave equation”. Finally, a longitudinal spherical wave should be calculated according to the “two-way wave equation” principle. The force related wave Equation (
2) serves as the starting point for the deflection
With
and the spherical Laplace operator
the Bessel differential equation follows:
with bessel function of half-integer order
as solution
Bessel functions are transcendent and the solution can only be approximated by series expansion. An exception is the elementary half-integer function , therefore the specific labelling as spherical Bessel function .
4. Discussion
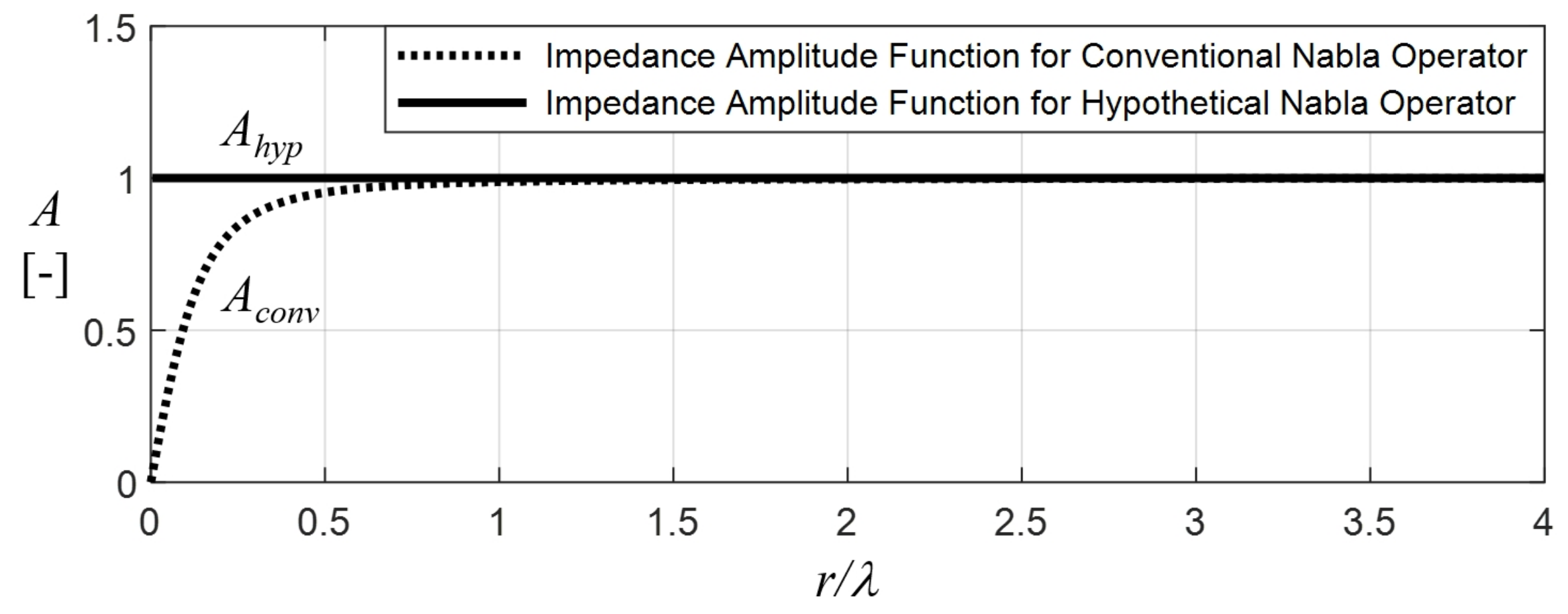
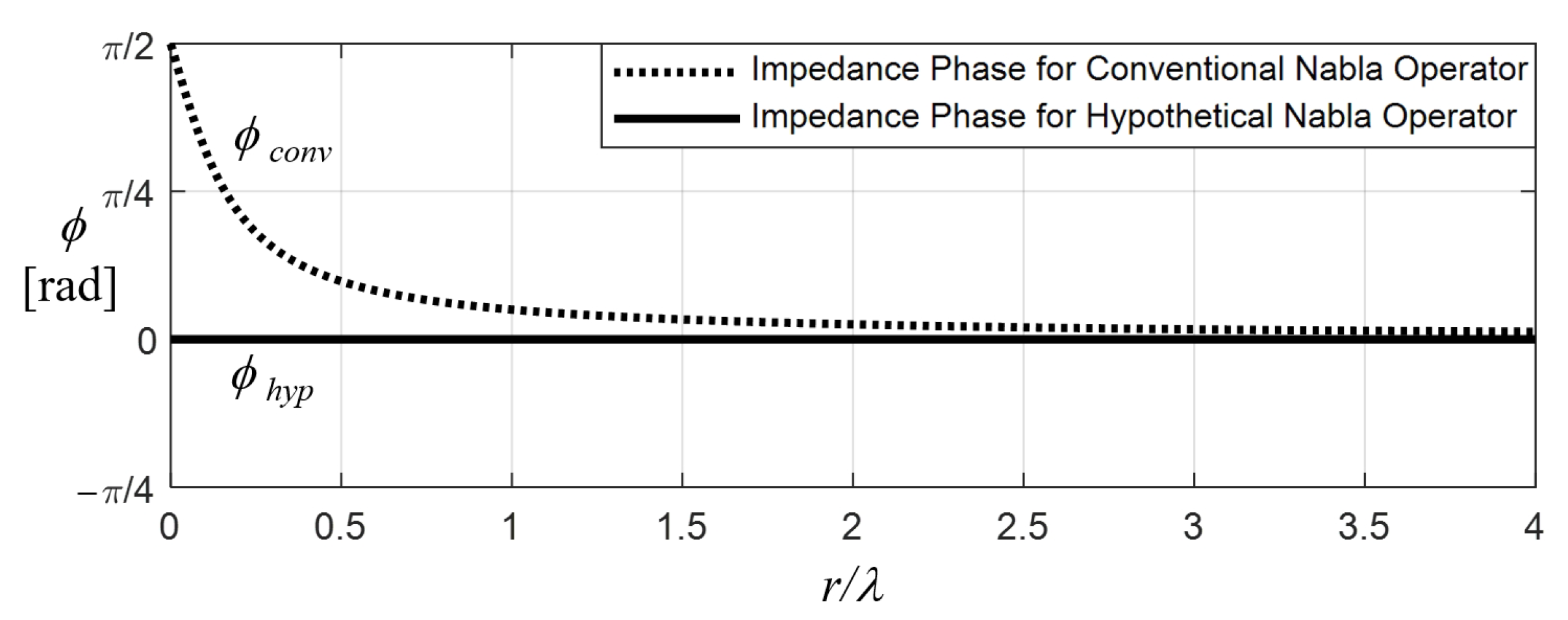
Following, the specific impedance
is taken to show numerical differences between the two competing Nabla operator variants. According to
Table 4 for the conventional (conv) Nabla operator the complex impedance
is normalized to
and transferred into polar form with the amplitude function
A [-] and the phase
[rad]:
For the hypothetical (hyp) Nabla operator the impedance amplitude function
[-] and the phase
[rad] have the following values
To illustrate the numerical differences between the conventional Nabla operator and the hypothetical Nabla operator variant
Figure 1 shows the impedance amplitude functions and
Figure 2 the phases depending on source distance
r devided by wavelength
[m]; the value
[-] is taken because it is more easily comprehensible than
. According to both graphs, the conventional and hypothetical Nabla operator concepts substantially differ in the near field, but show asymptotic approximation in the far field. Because in many contexts of spherical wave propagation near field influences are neglected, above given spherical one-way wave equations and the hypothetical Nabla operator lead to significant simplifications of the related calculations.






{kind=link}
{kind=link}