1. Introduction
Metallic alloys tailor-made for extremely demanding applications like in turbine blades are particularly expensive, as corrosion resistance and mechanical strength are achieved using noble metals and applying sophisticated manufacturing methods. Hence, it is essential to keep the manufacturing process stable and to ensure the construction elements to be defect-free and long-lasting.
Ultrasonic testing is a non-destructive testing technique particularly popular due to its high penetration depth compared to other non-destructive methods like Eddy current, magnetic particle inspection or X-ray based ones [
1]. Moreover, ultrasonic testing can be conducted using mobile devices. These two properties enable for instance inspection of thick and very large metallic components like ship propellers in place [
2]. However, ultrasonic testing relies heavily on correct interpretation of the measured signals. This work contributes to improving this interpretation by quantifying the so-called microstructural noise due to scattering of ultrasonic signals by the granular microstructure of metal alloys.
Metal alloys and many ceramics feature so-called polycrystalline microstructures consisting of grains defined by their local crystallographic orientation [
3] and size [
4,
5]. Ultrasonic waves are scattered at grain interfaces [
6]. As a consequence, ultrasonic signals measured in a polycrystal comprise all echos caused by the microstructure. This hampers the detection of defects due to overlap of many echos.
A wave is attenuated in the medium in which it propagates [
7]. The scattering at grain boundaries introduces a flux of energy from the propagating wave and thus contributes to attenuation [
8]. Truell et al. [
7] describe the relations between scattering and attenuation in complex media formally:
“The term “attenuation” is used throughout to mean energy losses (as measured by amplitude decay) arising from all causes when ultrasonic waves are propagated through a solid medium. These “total” losses can be classed broadly as scattering and absorption arising from the intrinsic physical character of the solid under study, as well as diffraction, geometrical, and coupling losses.”
There have been a variety of attempts to quantify the scattering caused by microstructure, starting with very simple microstructural models. Truell et al. [
7] and Ishimaru [
9] define the scattering cross-section of a volume element as observed scattered power flux density along a spatial direction. According to this definition, Truell et al. [
7] calculate normalized cross-sections for a variety of examples where a homogeneous isotropic sphere is embedded in a homogeneous isotropic matrix, as for example a magnesium sphere embedded in stainless steel.
Rose [
10] captures microstructural noise in the context of scattering in polycrystals by placing point-shaped scatterers with random scattering coefficients at random spatial positions. This strategy is further pursued in [
11,
12]. Microscopic inhomogeneities in a polycrystal are thus captured using prior knowledge about the number of scatterers, while their relative positions are ignored. Hirsekorn [
13] describes scattering in a system of closely packed scatterers as a function depending on scatterers’ volume and stresses the need for ultrasonic scattering simulation methods using an explicitly given system of closely packed scatterers as theoretically anticipated.
More recently, the granular microstructure of polycrystalline materials is modeled by spatial tessellations [
14,
15,
16,
17,
18,
19,
20,
21]. Ultrasonic wave propagation is simulated in extruded 2D [
22] or just 2D [
23] tessellations only, even in rather recent publications. Ryzy et al. [
24] and Van Pamel et al. [
25,
26,
27] simulate ultrasonic wave propagation in truly 3D structures. Both groups apply NEPER [
28] to first generate 3D Poisson Voronoi tessellations and then regularize them by shifting the cell generators. In [
27], even an exponentially decaying two-point correlation function as assumed in analytical models is derived that way. Subsequently, displacement fields are computed in finite element mesh (FEM) representations of the regularized cell systems. To this end, Van Pamel et al. [
25,
26,
27] use the GPU based FE software POGO [
29], while Ryzy et al. [
24] rely on the commercial software package PZFLEX (Weidlinger Associates Inc., Washington, DC, USA). Despite the computational load, in [
27], the displacements are calculated for a system of more than 10,000 cells. However, the tessellation models are not fitted to an observed real polycrystalline microstructure. Thus, material specific behavior is restricted to the mean cell or grain size and usage of the respective elastic material constants.
We describe a complete simulation workflow for simulating the microstructural noise caused by the grain structure of the investigated material. More precisely, our simulation accounts for the spatial and size distribution of the grains. We model the microstructure including the scatterer volumes, simulate backscattering from the entire microstructure, and compute time domain signals. We make heavy use of the Born approximation of the scattering field when it is small compared to the incident field. This assumption holds in our case of microstructural noise, as long as the wavelength of the propagating wave stays larger than the scatterers’ dimensions.
Stanke and Kino [
8] developed a unified theory for elastic wave propagation in polycrystalline materials accounting accurately for microscopic inhomogeneities in the case of time-harmonic elastic waves, in particular phase velocity variations and attenuation due to scattering. The polycrystal is represented by the geometric correlation function.
We combine the scattering theory from [
8] with an explicit spatial microstructure model as used in [
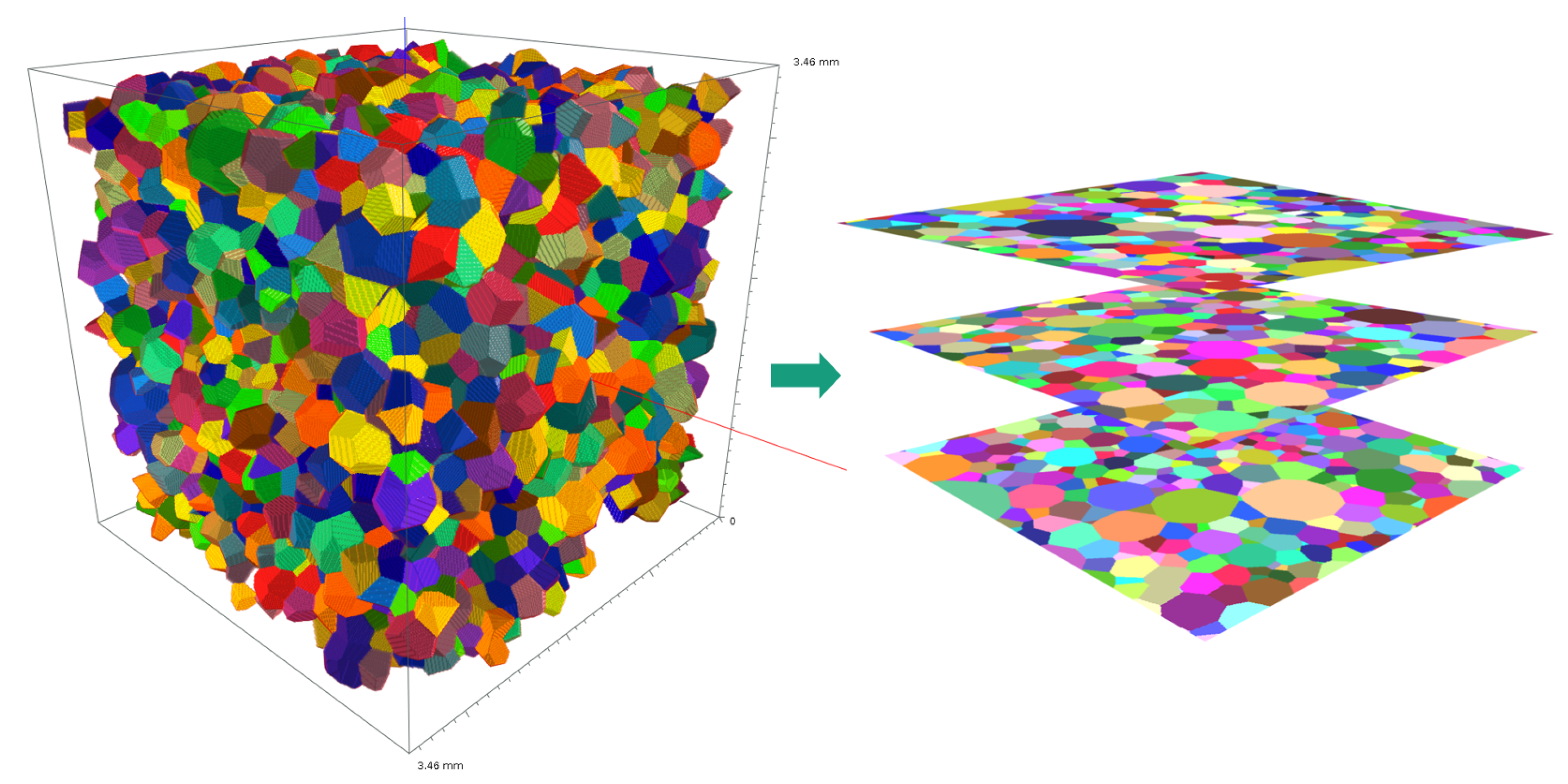
5] to simulate the backscattered transient ultrasonic signal. To this end, we use microstructural information from light-microscopy and diffraction computed tomography. Both techniques are destructive in the sense that samples need to be cut and further prepared to obtain as detailed microstructural information as needed here. Based on the quantitative geometric information thus derived, we fit microstructure models specifically to the considered materials. More precisely, we derive a virtual representation of a polycrystalline single-phase alloy as a realization of a random tessellation model. The cells of the tessellation represent the grains and cell volumes follow the grain volume distribution observed in the real material. In enlarged volumes, generated from the fitted tessellation model, we compute the backscattering contributions of all cells, superpose them in Fourier space, and transform the power spectrum back into time domain.
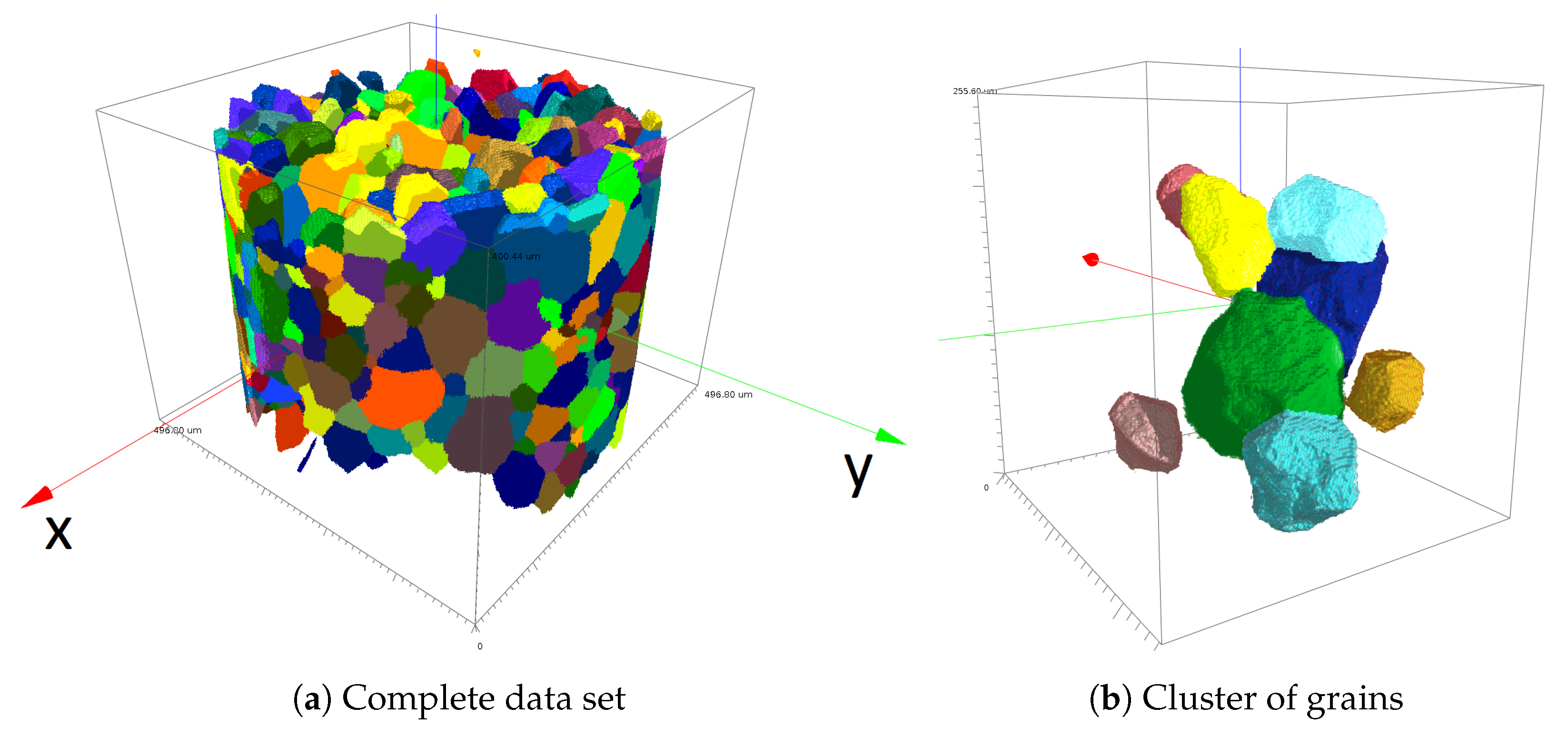
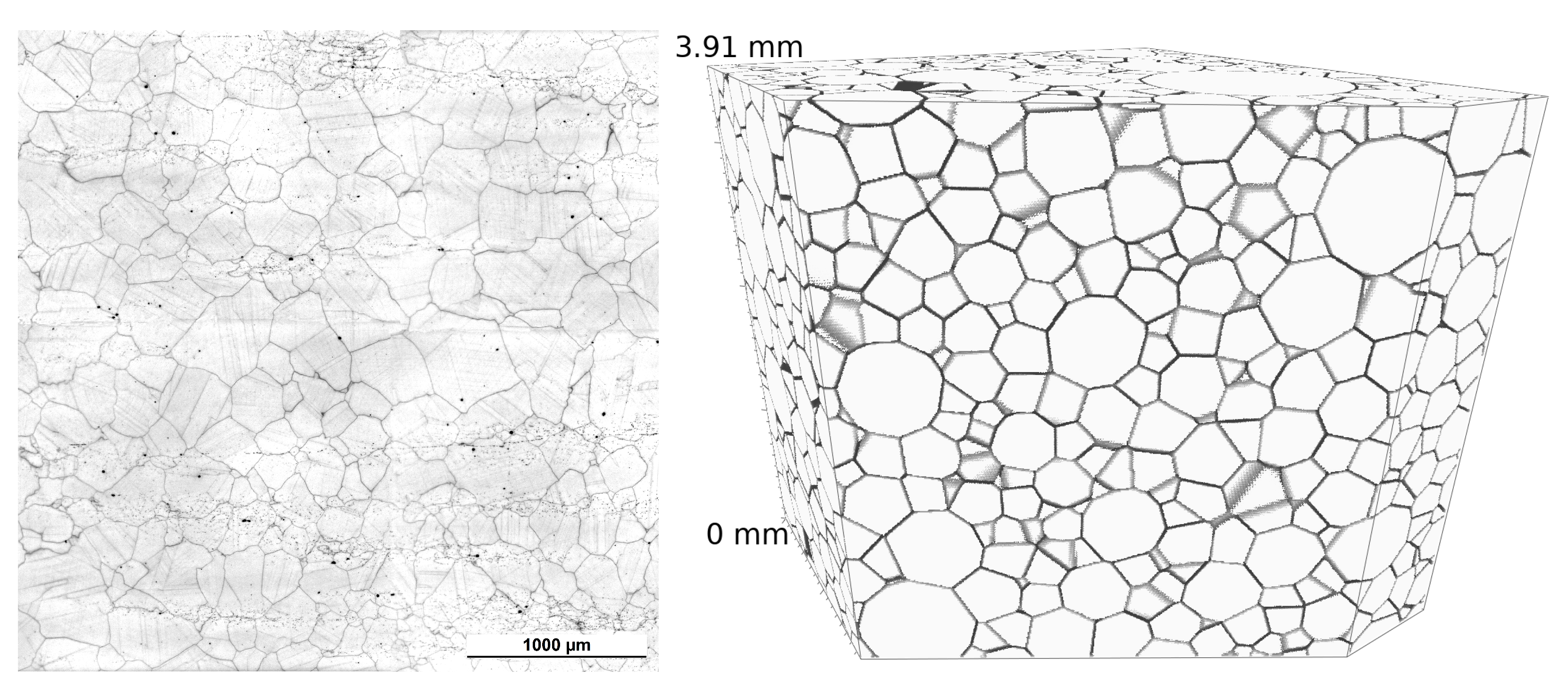
We apply the model based spectral simulation approach to a cubically crystallized Inconel-617 observed in light-microscopic images of planar sections through the microstructure and a hexagonally crystallized titanium given as fully three-dimensional X-ray diffraction computed tomography data set. We model both alloys as a single-phase polycrystal. The titanium features fine grains, while the Inconel’s microstructure is coarse. We expect our study to contribute to a deeper understanding of the relation between material dependent 3D microstructure and the ultrasonic wave propagation. This contributes to better interpretation of measured ultrasonic signals.
This paper is organized as follows: In
Section 2 we describe the general virtual experiment. We summarize the needed scattering theory (in
Section 2.1) including the geometric correlation function (in
Section 2.1.1) and scattering coefficients (in
Section 2.1.2).
Section 2.2 is dedicated to modeling the single-phase polycrystalline microstructures using random Laguerre tessellations (in
Section 2.2.1) with log-normally distributed grain volume (in
Section 2.2.2) and fitting the model to real microstructures (in
Section 2.2.3). In
Section 2.3, we close the gap between the fitted microstructure model and computing of ultrasonic signals in its realizations. In
Section 3, we model the microstructures of the Inconel-617 (in
Section 3.2) and the titanium (in
Section 3.3).
Section 4 summarizes our findings including microstructure model parameters and ultrasonic signals for the Inconel-617 (in
Section 4.1) and for the titanium (in
Section 4.2). Results and future topics are finally discussed in
Section 5, followed by the conclusion in
Section 6.
2. Methods
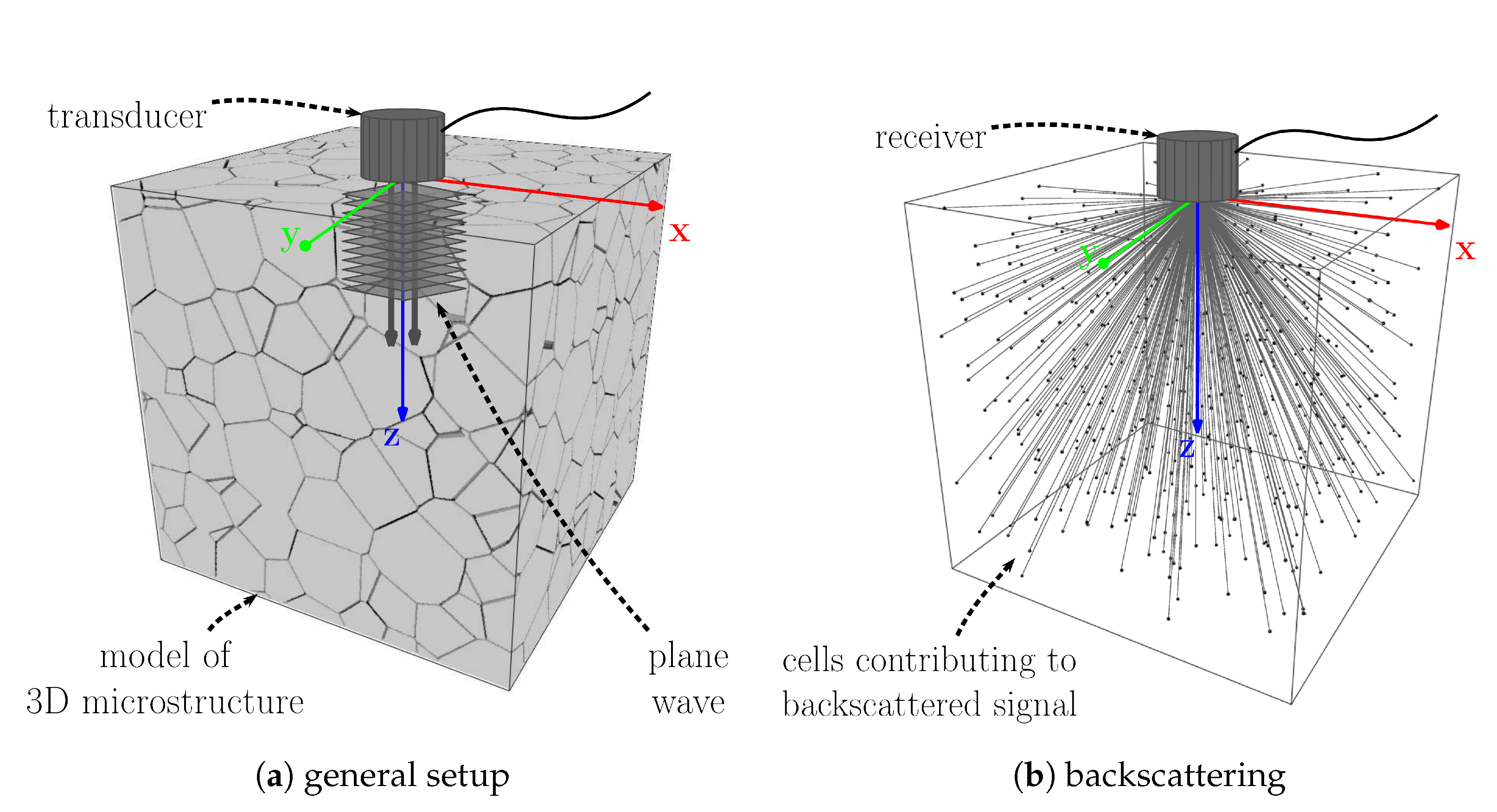
We perform a virtual ultrasonic pulse-echo-test in an explicitly given 3D microstructure generated by a stochastic microstructure model as sketched in
Figure 1. The microstructure model’s parameters are determined by fitting to the grain size distribution observed in images. Using the found model parameters, we generate representative realizations of the model. In these 3D microstructures, we finally simulate numerically the ultrasonic testing by the pulse-echo-technique as sketched in
Figure 1. We do not simulate the back wall response. Instead, we compute the backscattered contribution from the entire microstructure for each realization of the model. We superpose the response signals in frequency domain yielding a spectrum. Finally, we apply the Fourier transform resulting in a time-domain signal. Altogether, a set of 3D microstructures leads to a corresponding set of time-domain signals.
This paper devises a method for computing ultrasonic microstructural noise based on a geometric model of the investigated polycrystalline material. More precisely, we simulate scattering due to individual grains. Note that this is not the same as the so-called grain noise well-known from ultrasonic experiments. The difference is due to the virtual experiment being still much simpler than the real one as it does not capture at all multiple scattering—a non-negligible source of microstructural noise in real ultrasonic experiments.
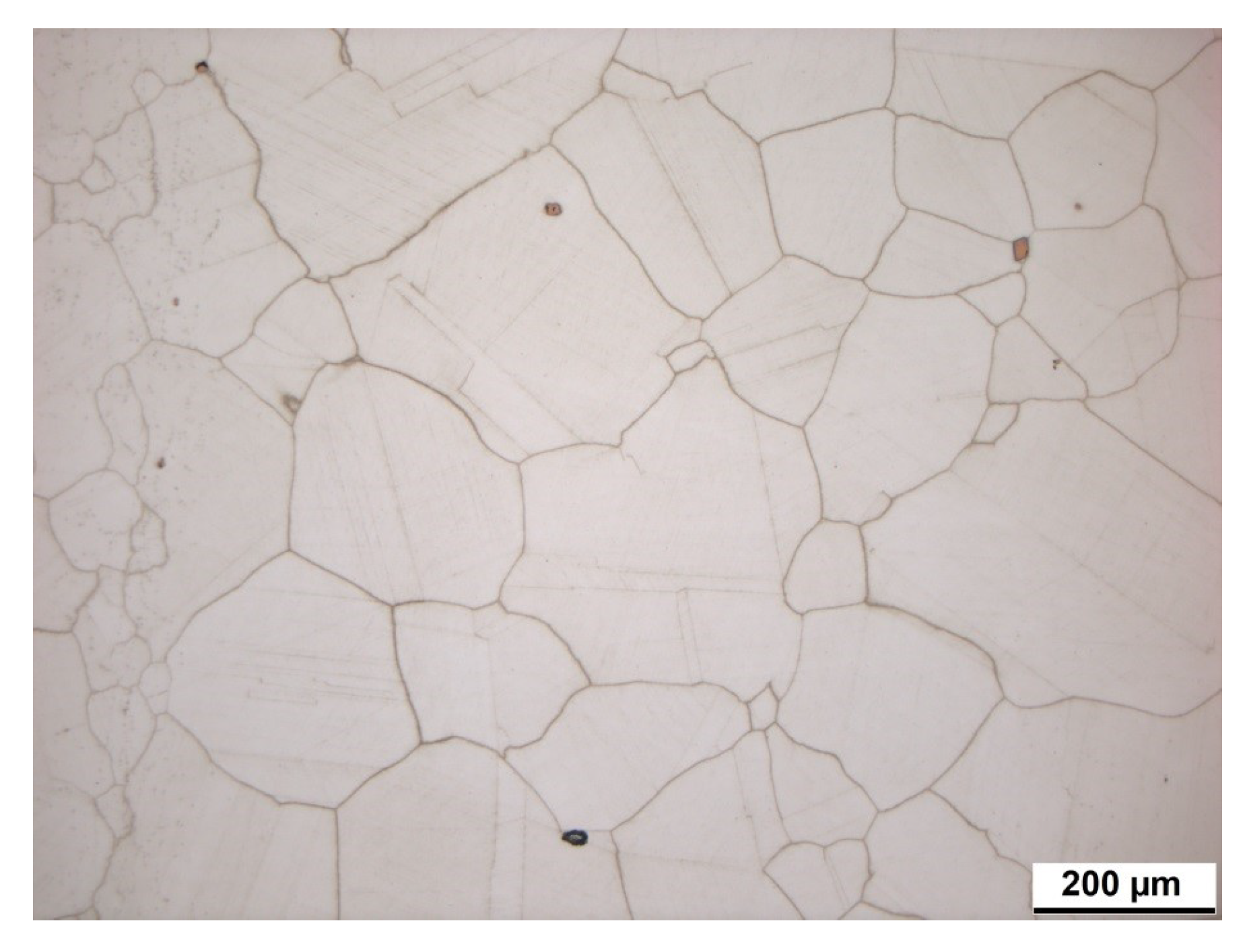
We compute the wave propagation for two microstructures, i.e., Inconel-617 and titanium, with strongly varying properties, see
Table 1. ASTM classifies microstructures by average grain diameters observed in 2D micrographs [
30]. According to this classification, Inconel-617 is class no. 2 (0.185 mm) and titanium class no. 8 (0.022 mm). Scattering coefficients are computed for nickel, too, to compare with [
13,
31]. Due to lack of microstructure data, we do not fit a model but calculate the spatial scattering function based on the effective diameter from [
13,
31], only.
We model the propagating wave as a planar one, as indicated in
Figure 1. That is, the wave is constant in a plane perpendicular to the propagation direction.
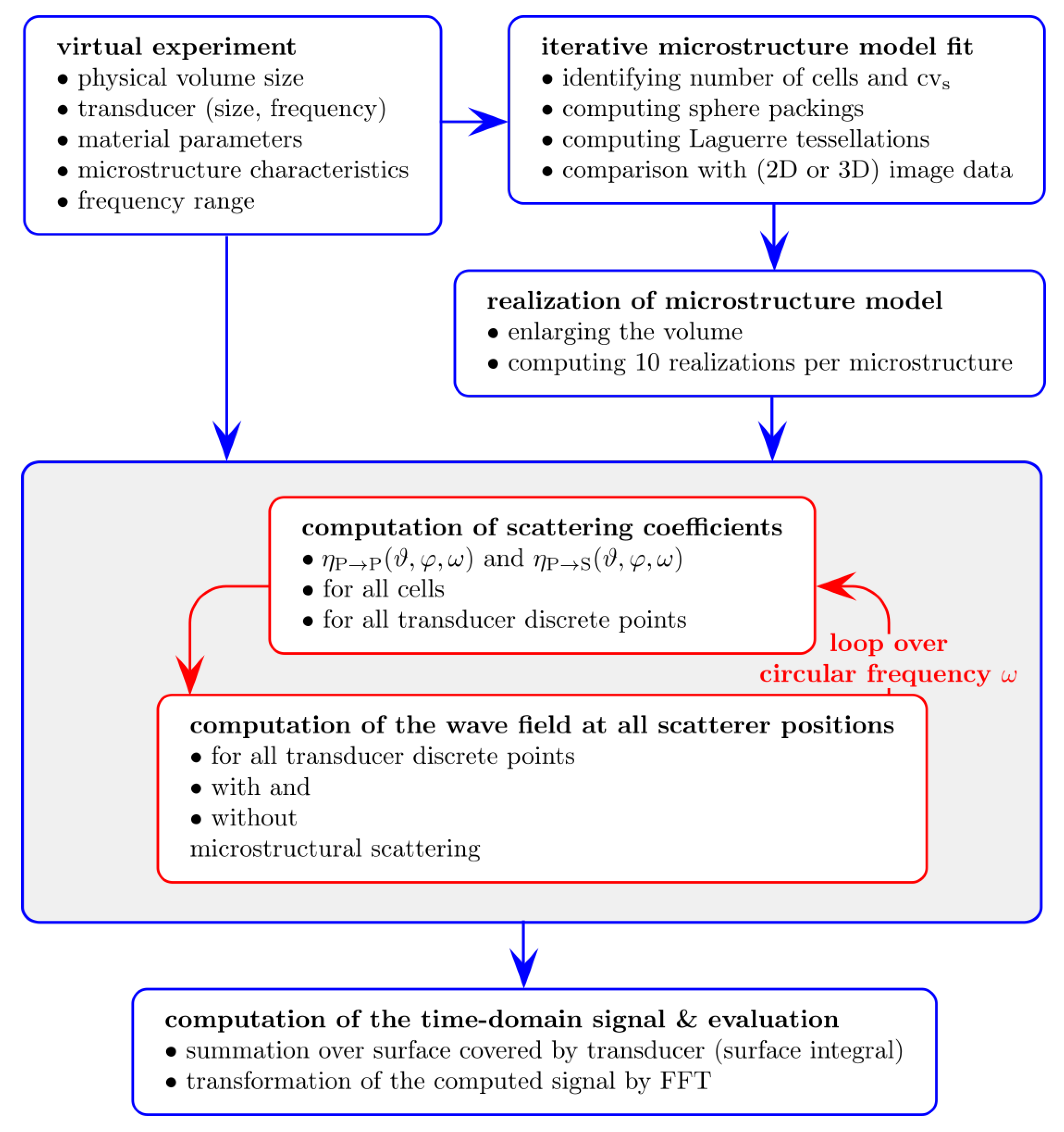
Our workflow is sketched in
Figure 2. There are three steps to be taken: First, the transducer as well as the transducer’s bandwidth are discretized according to the sampling theorem [
34]. The required parameters are listed in the upper left box of
Figure 2. Also in the first step, the microstructure model is fitted and representative realizations are generated, see the right upper boxes. In the second step, the displacement field at scatterers’ positions due to wave propagation in momentum space is computed. Finally, in the third step, we transform the signal into the time domain using the Fast Fourier Transformation. Note that the scheme in
Figure 2 is already specialized to modelling the microstructure by Laguerre tessellations generated by random packings of hard spheres.
2.1. Scattering Theory
The ensemble average of a physical quantity is the mean of this quantity over a state of the considered system [
35,
36] with the region or time interval of averaging being comparable to the slot when or where the observed system changes its state. Scattering effects due to local microstructural inhomogeneities vary with grain size and orientation, and thus have to be captured at the scale of the grains. The scattered energy densities for a certain volume of a particular medium can be derived from the microscopic position dependent material characteristics like single crystal elastic constants and density and the ensemble average.
Ensemble averaging for ultrasonic propagation in polycrystalline materials has been used for a long time, see e.g., [
37,
38,
39]. Here, we follow the idea of Hirsekorn [
13,
40] and investigate the effects of closely packed scatterers. In [
13], the elastodynamic equation of motion is solved assuming small deviations due to microstructural variation. This variation is captured by modelling the microstructure as a system of closely packed scatterers exposed to the propagating ultrasonic wave. The scattered energy flux relates the frequency dependent time harmonic displacement field for one vibrating cycle and the material specific stress tensor, see [
7] for more details.
The Born series [
41] for the propagating wave yields an approximation of the resulting displacement field. Material dependent parameters like size and orientation distribution of the grains are accounted for by the geometric correlation function. Ensemble averaging is applied to the Born series terms. Finally, the energy flux is derived as an infinite sum, time averaged over one vibration cycle. The
n-th order Born approximation of energy flux is the corresponding
n-th partial sum,
. It represents the incident and scattered waves’ interaction with the microscopic inhomogeneity of the material. Hirsekorn uses the lowest non-zero order Born approximation to derive an analytical expression of the ensemble averaged total energy flux due to scattering waves for both, incoming and outgoing waves [
13]. Thus, using this approach, only first-order scattering events are taken into account, no multiple scattering. The sum of outgoing and incoming waves equals zero due to the conservation of energy [
13]. Here, we consider the outgoing waves, only, as we aim at revealing the backscattered wave contributions.
2.1.1. Geometric Correlation Function
Ensemble averaging in polycrystals incorporates microstructural features by multiple-point correlation functions of the local crystal orientations. In order to be feasible, approximations use a variety of simplifications, e.g., only 2-point or pair-correlations. If the orientations of grains are assumed to be independently distributed, then the 2-point orientation correlation boils down to the orientation distribution function multiplied by the geometric 2-point correlation—the probability of two points falling into the same grain [
42,
43]. The latter depends exclusively on the distance of the considered points if the structure is macroscopically homogeneous and isotropic.
Stanke and Kino [
8] incorporate the 2-point correlation function
into their unified theory of elastic wave propagation assuming it to decline exponentially:
, where
r is the distance of a point pair and
is the mean chord length of the grains, also called mean free path length or correlation distance. This simple shape of the orientation correlation is convenient yet not realistic, see [
44,
45] and references therein. Following [
8], Hirsekorn [
13,
40] derives from
the effective volume
of a scatterer as
Roughly speaking,
can be interpreted as the volume that scatters if the correlation length is
. Plugging in
into the Born approximation yields the scattering coefficients reported in [
13].
We aim at emphasizing the contribution of individual grains to microstructural noise. Thus, we follow [
13,
40] in treating the grains as homogeneous and completely independent scatterers. However, we observe the effective scatterers’ volumes
directly as the cell volumes in our tessellation model realizations. The effective diameter
of a cell or grain is derived as the diameter of the sphere of volume
2.1.2. Spatial Scattering Function
Evaluating the second order term of the Born approximation and utilizing Equation (
1) yields analytical representation of scattering coefficients
with
being the corresponding circular frequency and
f a fixed frequency.
are the spherical polar coordinates of the local coordinate system, whereat
maps the scattering coefficients along spatial directions around a scattering volume
. Thus, we call this analytical representation of scattering behavior spatial scattering function.
The following notation is used throughout: Denote by
,
the wave numbers for the pressure (P) and shear (S) waves, respectively. The subscript is made of incoming→outgoing wave, which is either pressure or shear, respectively. The spatial scattering functions are:
with
being the materials’ density. Equations (
2)–(
5) presume a specific incoming pressure or shear wave given by wave vector
in both cases, and either the pressure polarization vector
or shear polarization vector
. This presumption sets up the relation between single scatterers and the transducer, which is the source of the incoming wave. As in [
13,
46], this models how single scatterers and the transducer interact. Here,
denote the ensemble averaged elastic constants from [
40] listed in
Table 2 below.
The spatial scattering functions are defined in intrinsic coordinates, with the origin of the local coordinate system in the center of scattering volume
. In terms of Cartesian coordinates
, the positive
-axis of the local coordinate system is aligned with the positive
z-axis of the global coordinate system.
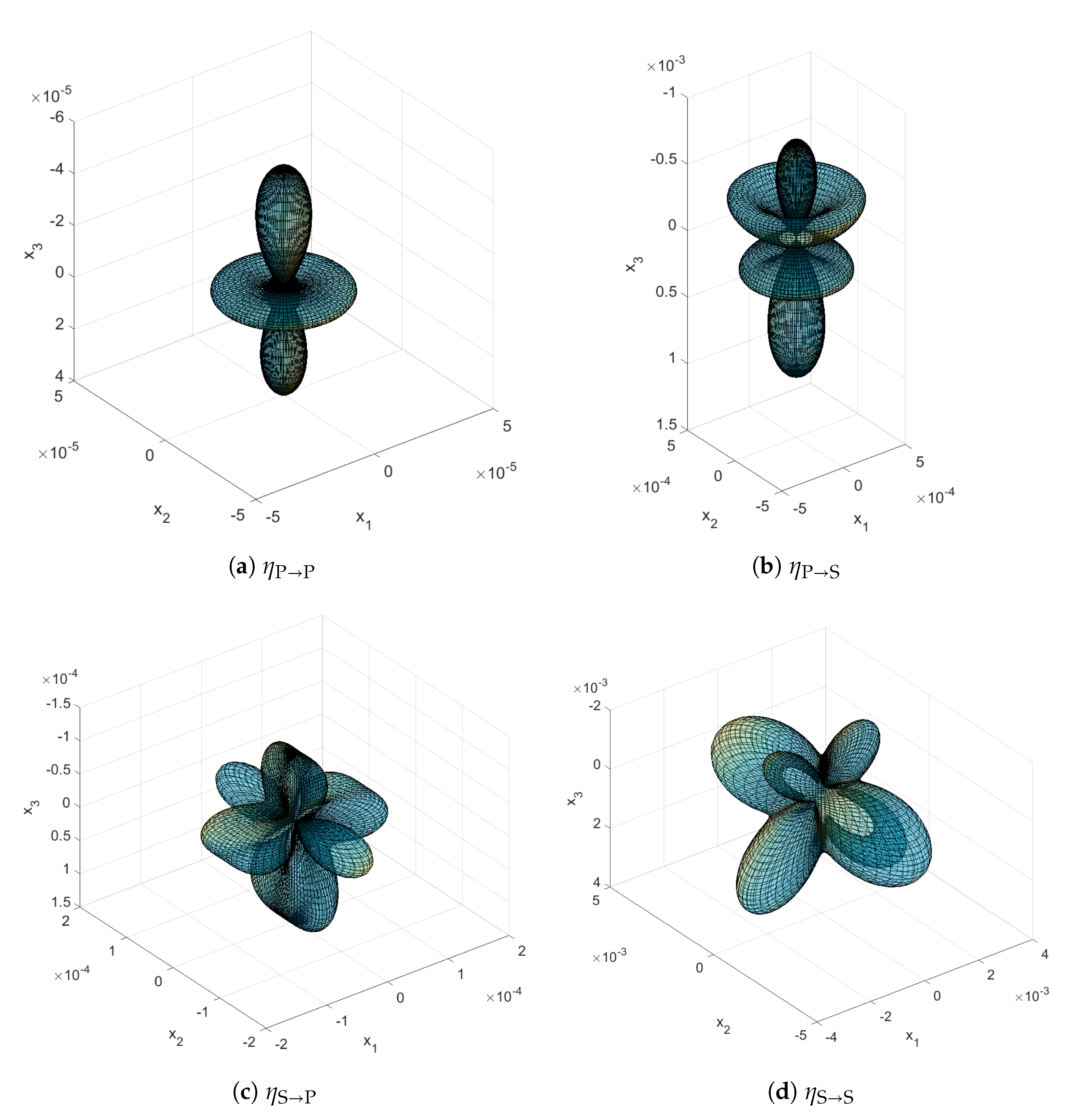
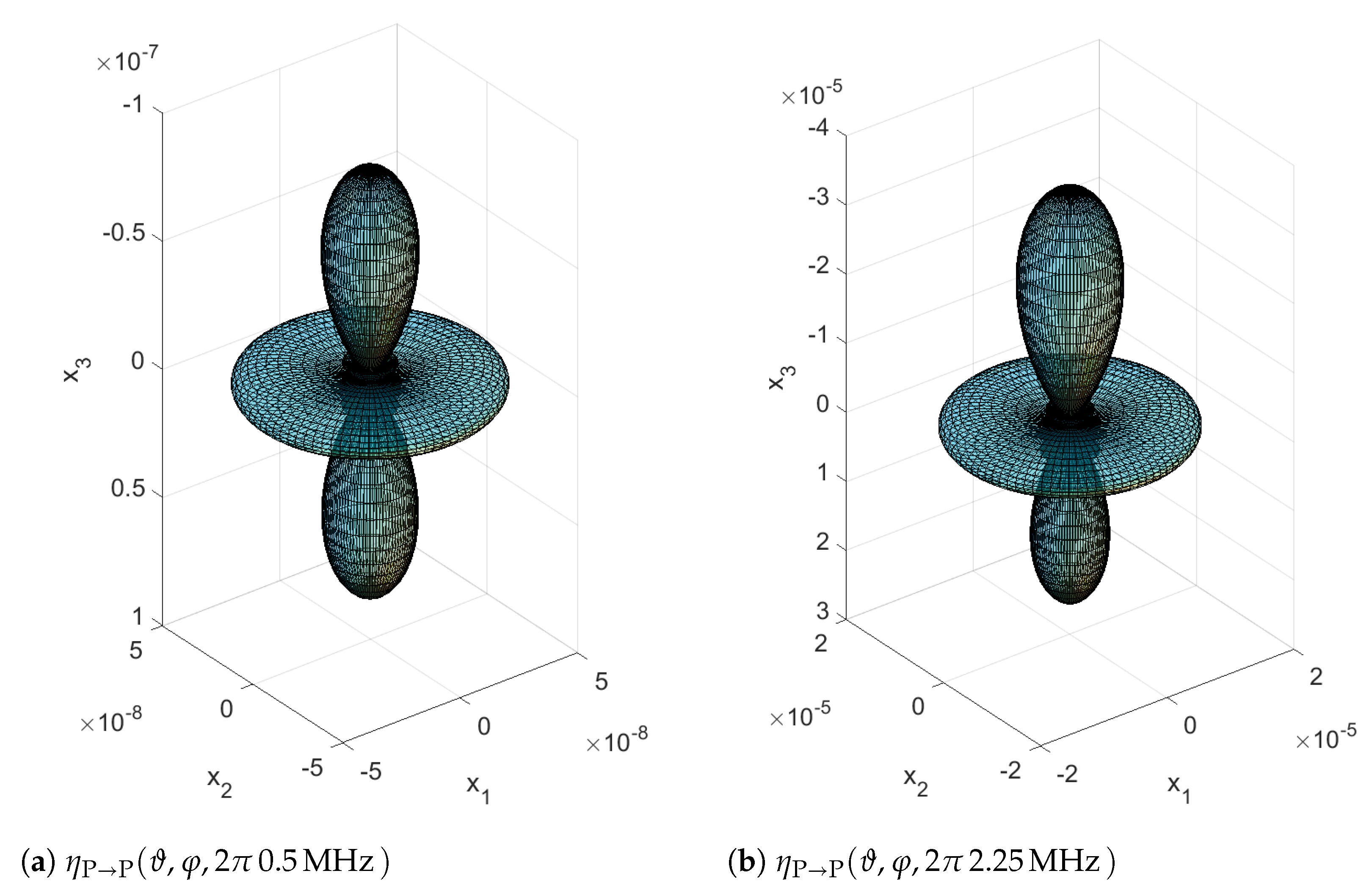
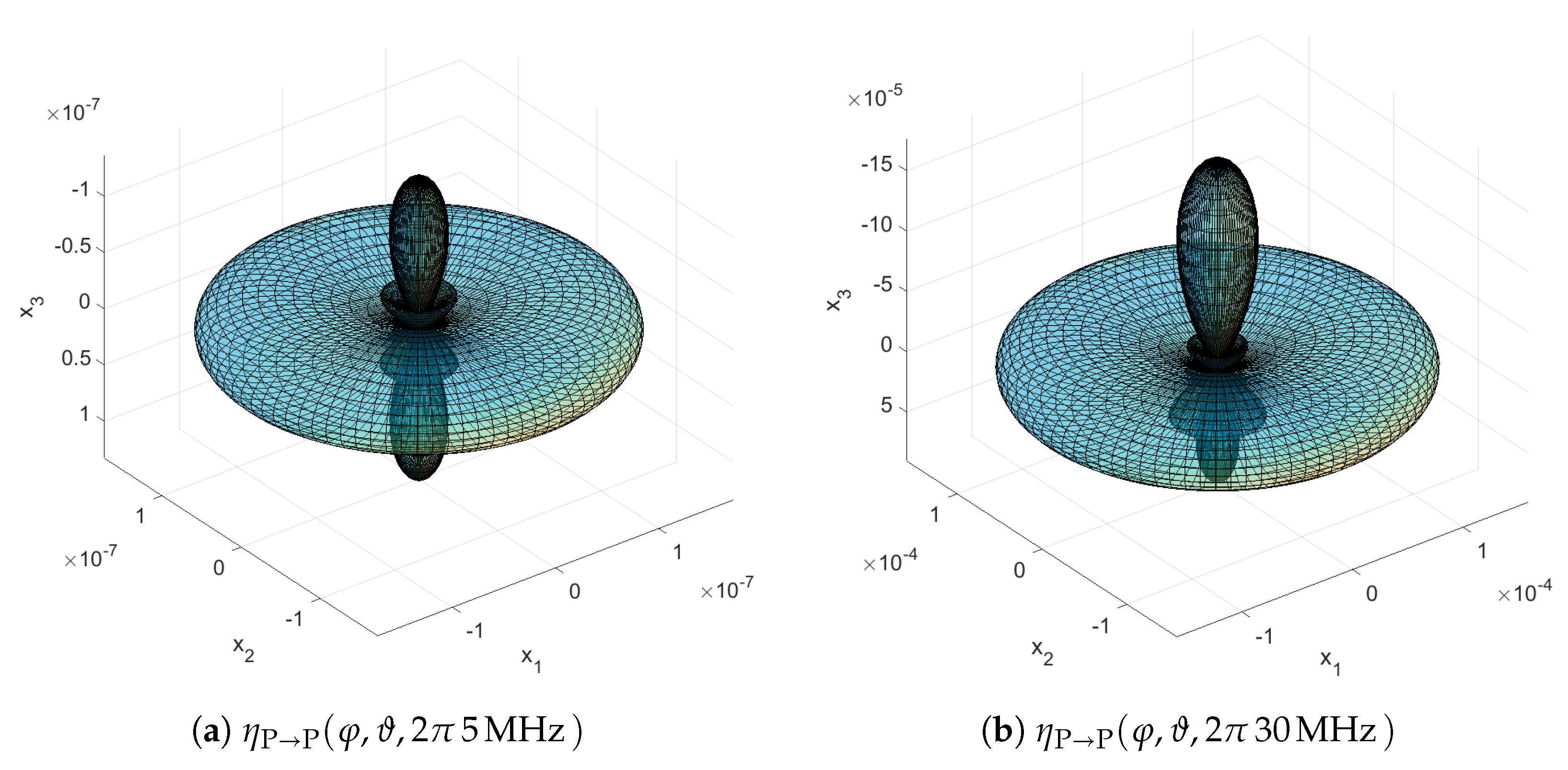
Figure 3 shows the spatial scattering function for a single scatterer in nickel (see also
Table 1). In the following, we use Cartesian coordinates and the base unit mm
in all graphical representations of the spatial scattering functions.
In [
13], the normalized scattered wave coming from a point in the material is plotted in two dimensions, in [
31] the same is done for the normalized scattered wave coming into a scatterer. These quantities depend however on all three spatial directions. We therefore visualize the normalized scattered wave coming from a scatterer from [
13] in three dimensions.
To summarize, we model each grain as a cell contributing by its volume to the backscattered ultrasonic signal. The cell’s orientation is accounted for by the ensemble averaging. The Born approximation relies on a macroscopic isotropy of the microstructure. That means, in all further steps, cells do not have a specific orientation anymore. Note however, that our workflow in principle carries over to modelling the orientation and its scattering effect, too.
2.2. Geometric Modelling of Polycrystalline Microstructures
There is a wide variety of geometric characteristics describing spatial size and shape of grain systems. A basic and in some sense complete system of characteristics for the grains are the intrinsic volumes or Minkowski functionals [
47]. Ohser’s algorithm allows to estimate them efficiently based on 3D image data [
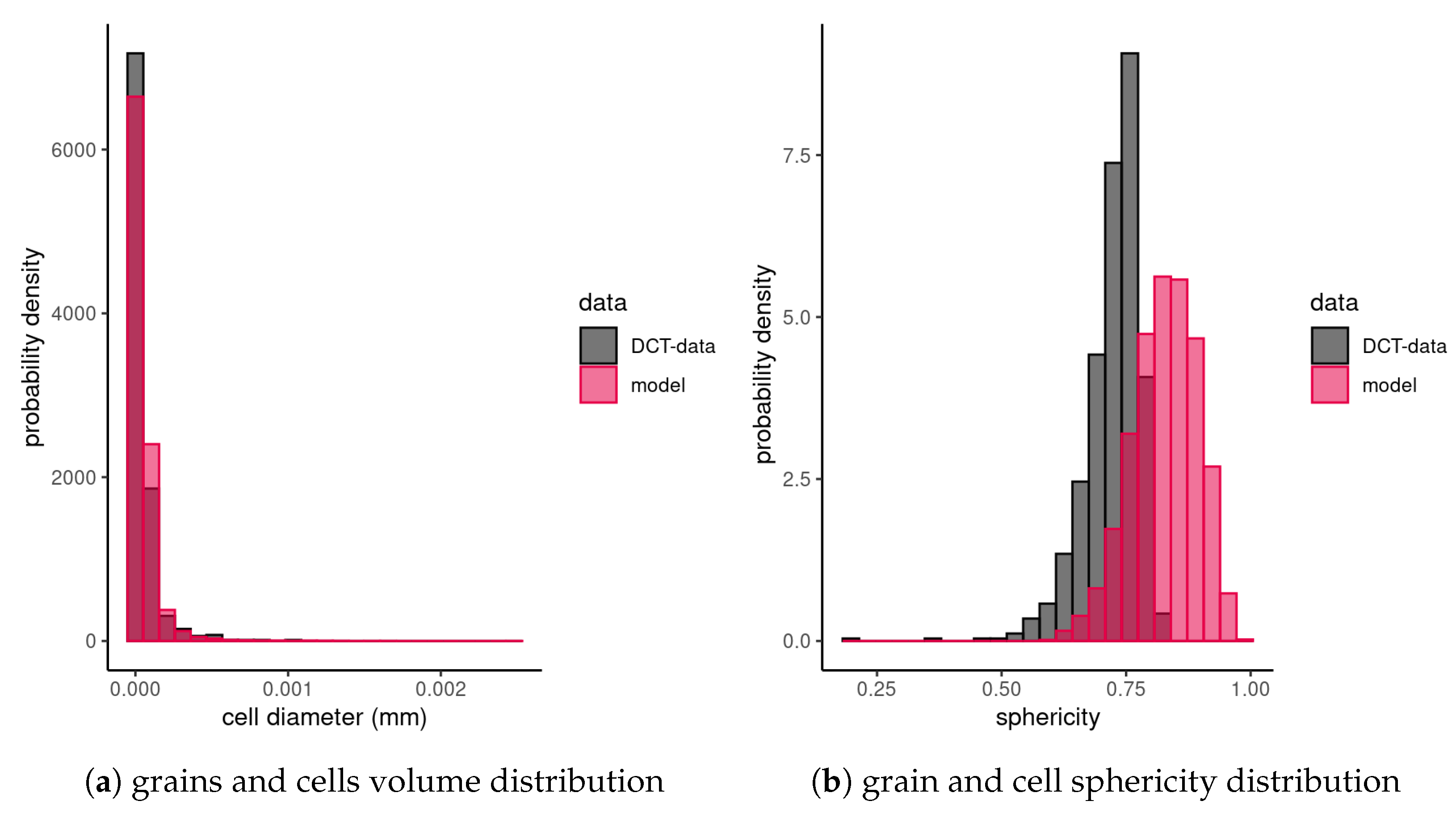
48]. For the titanium, we use the volume
V, and the isoperimetric shape factor
derived from volume and surface area
S. This dimensionless index, often called sphericity, is normalized such that it attains the value 1 for a perfect sphere. Moreover,
with 1 being reached by the sphere, only.
For the Inconel-617, we use the maximal Feret or caliper diameter of the 2D grain cross sections—basically the longest Euclidean distance of two points in that grain.
2.2.1. Laguerre Tessellations
Random tessellation models are used to model the grain structure of polycrystalline materials in many contexts [
20,
21,
49,
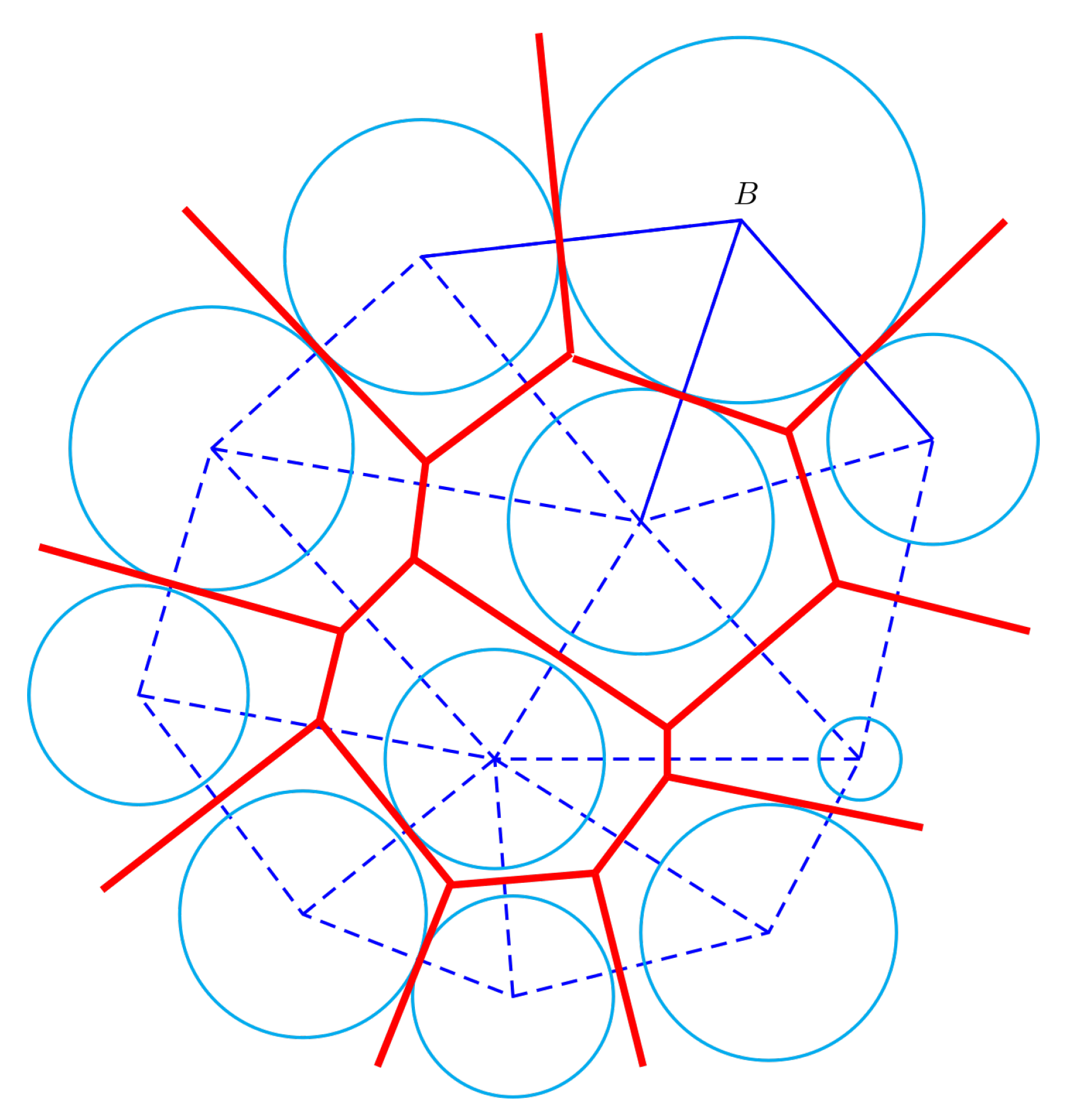
50]. Most common are Voronoi tessellations, dividing space by assigning each point to the nearest generator. In Laguerre tessellations, this well-known rule is generalized such that generator’s attraction is steered by an additional weight [
51]. The thus achieved higher flexibility allows for better control over cell sizes, see
Figure 4. Laguerre tessellations generated by random closed packings of spheres are a standard model for rigid foams [
52,
53,
54,
55] and popular models for polycrystals [
5]. Methods for fitting in the statistical sense [
52], reconstruction from 2D images [
56] or cell centroids and volumes in 3D [
21], as well as approximation based on 3D image data [
20] are available.
Here, we use Laguerre tessellations generated by random packings of spheres. We use the force biased collective rearrangement algorithm [
57], an effective modification of [
58] in the way described by [
59,
60]. This choice is motivated by the good control over the cell volume distribution this model allows. Note that Fan [
5] builds on a collective rearrangement packing, too [
61,
62].
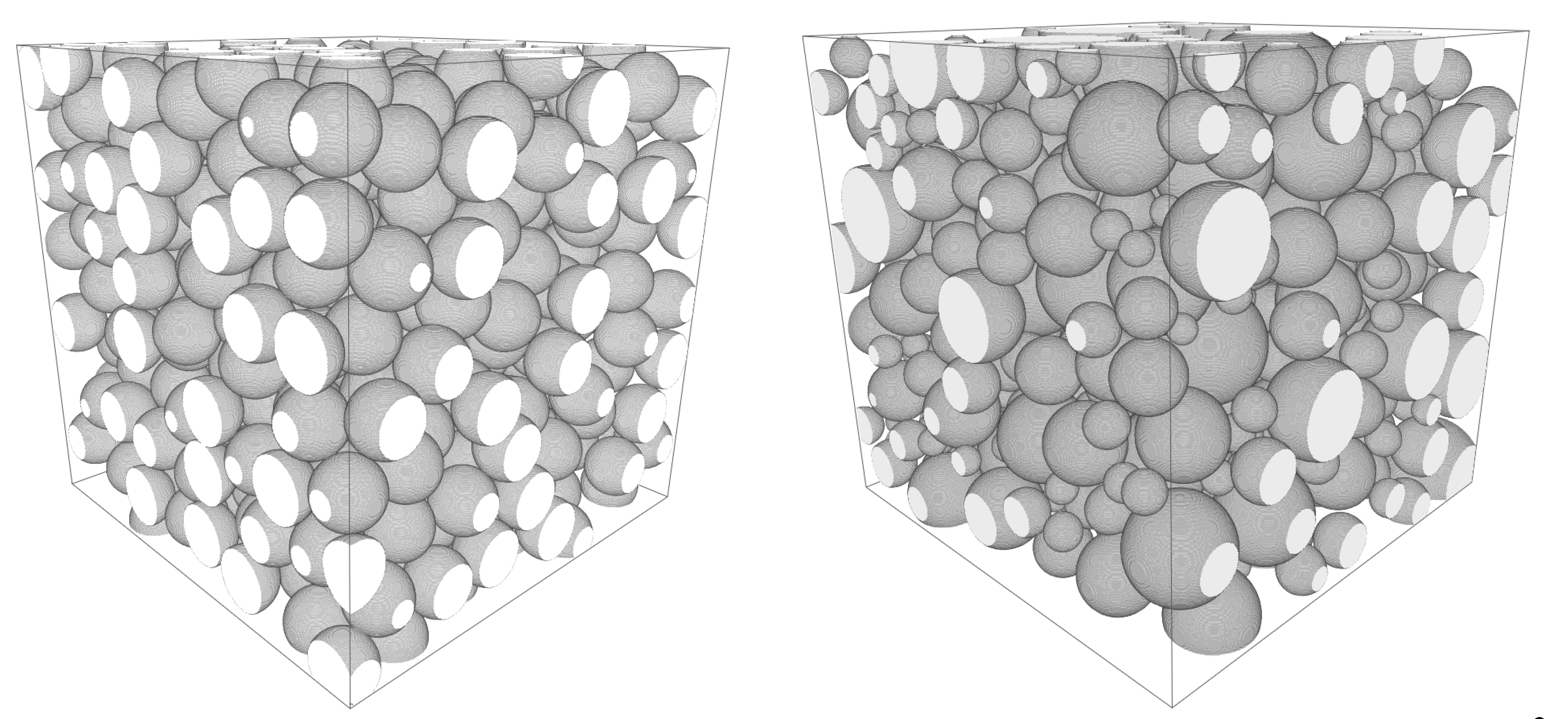
For the sake of independence, we sketch the mechanism of the force biased packing algorithm: At the beginning of the packing, spheres with an outer soft shell and an inner hard core are placed in the container. The shells are allowed to overlap. Spheres push each other away with forces depending on the overlap. In a collective rearrangement step, they move according to the cumulative forces of repulsion. Then, the outer shells of the spheres decrease while the cores grow up to the size that just prevents overlap of the cores. These steps are iterated. The packing ends if the desired packing density—proportion of the volumes of the sphere system and the container—is reached or the shells have disappeared or the number of iterations has reached a predefined limit. See
Figure 5 for the volume rendering of a thus derived sphere system.
The cell structure modeling the polycrystal is then derived from the sphere packing by the Laguerre mechanism: We denote by
the center and by
the radius of sphere
i for
. Then
is a set of generators with non-negative weights. A point
is assigned to the cell
generated by
if its weighted distance to
is smaller than to any other generator. The point
y is assigned to the
i-th cell if
is less than
for all
. The wall between two neighboring generators is the perpendicular bisector between their respective spheres, see
Figure 4 for an illustration of the mechanism.
That way, our random system of non-overlapping spheres divides the space into convex cells
with diameters
of volume equivalent sphere as given by (
1). Additionally, we equip each cell with its center of mass
.
2.2.2. Grain Size Distribution
Grain sizes in polycrystalline materials are usually assumed to be log-normally distributed [
4,
63]. In Laguerre tessellations generated by dense sphere packings, the cell size distribution is dominated by the size distribution of the generating spheres [
5,
52]. We therefore model the sphere volumes
according to a log-normal distribution. The probability density function
h of the log-normal distribution with parameters
is:
Expected sphere volume
and the sphere volume standard deviation
are then [
52]
On the other hand
with
denoting the coefficient of variation of the sphere volume.
Note that the coefficients of variation of the resulting grain volumes
and the generating spheres
surely differ with
. For very dense sphere packings as in [
5], the difference is small as the cells do not differ strongly from their generating sphere. If the sphere packing density
is lower, the difference grows. We use the cubic polynomial in
fit to
for the densely packed case from [
5]. See [
52] for a more general discussion.
2.2.3. Fitting the Geometric Model Based on 2D Image Data
Model fitting solely based on 2D image data is an ill-posed problem. In [
56] an optimization based on a goodness-of-fit criterion for 2D slices is devised to avoid costly simulations of the full 3D Laguerre tessellations. However, [
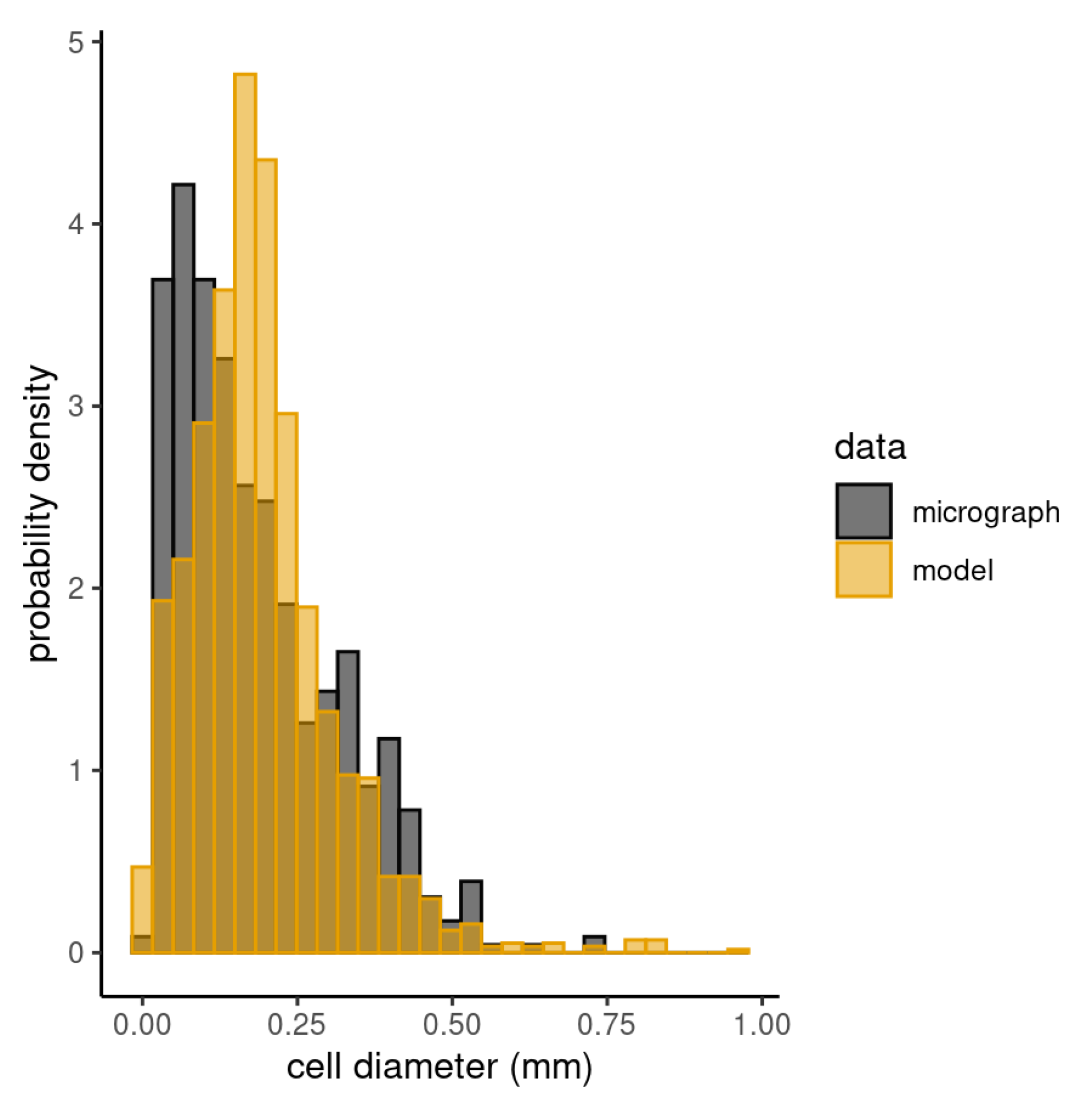
56] aims at exact reproduction of the observed 2D cell structure. Here, we can use a simpler approach, closer to [
50]: We simulate 3D tessellations, compare 2D slices cut from them with our 2D observations, and alter the parameters to reduce the differences. This is repeated till the fit is sufficiently good.
First, we estimate the expected number of grains per volume
. There is no straight forward method to do so based on the observed grain number in planar sections
in case of Laguerre tessellations generated by sphere packings. However, for the special case of a spatial Voronoi tessellation generated by a Poisson point process [
47] (10.74) yields:
Following the recommendation from [
47] to use this approximation for the non-Poisson case, too, we set the initial number of cells to the value which is expected for the Poisson Voronoi tessellation case. The initial guess for the coefficient of variation of the sphere volume distribution is set to
as this is about the center of the range
for the grain volumes reported by [
5].
We generate a force biased sphere packing using mean sphere volume and , derive the Laguerre tessellation, extract planar sections, and compare them with the 2D micrographs based on the Feret diameters of the cells. We adjust the number of spheres in the random packing based on comparison of the maximal Feret diameters and iterate till the mean maximal Feret diameter (or the cell density) is met.
In the second step, the coefficient of variation of the sphere volumes is fit by a simple grid search. Again, we compute sphere packings and derive the corresponding Laguerre tessellations. We take five section planes in each of the three coordinate directions, measure the maximal Feret diameters, and compare the mean maximal Feret diameter and the standard deviation of the maximal Feret diameters in these 2D sections with the corresponding characteristics measured in the 2D micrographs. We finally choose the value for yielding the best agreement.
2.3. Simulation of Wave Propagation
We simulate the wave propagation in momentum space by calculating displacement at scatterers’ positions, as drafted in
Figure 1. First, we compute the displacement induced by a propagating wave. We discretize the surface covered by the transducer by
source points
. After all, we evaluate the energy contribution along these particular spatial directions, i.e.,
. Here,
is the incoming polarization vector and
the group velocity, both determined by vectors
y and
m. The displacement
due to propagation of an elastic plane wave can be modelled at scatterers’ positions as a superposition of all source points by
with
indicating incoming pressure (P) or shear (S) waves,
j the complex unity and
denoting the amplitude of the propagating wave.
The second contribution is the displacement due to scattering at scatterers’ position. We define the latter following Equation (
8) in [
64], namely:
with
and
being the reflection coefficients. Thereby, all polarization vectors contribute to the result—those of the incoming (I) as well as those of the reflected (R) waves. We adapt Equation (
13) by replacing the reflection coefficients by the scattering coefficients given analytically in
Section 2.1.2. This yields
The polarization vectors
of the reflected contributions are evaluated in direction of the corresponding slowness vectors. Červený [
65] defines the reflected slowness vector as a function of incoming slowness vector and thus the reflected contributions are governed by the corresponding slowness vectors i.e.,
. Also, the direction of reflected slowness vectors governs the scattering coefficients. The scattering coefficients in Equations (
2)–(
5) are derived as
where the subscripts
represent the components of
. In Equation (
14), the angle and frequency specific scattering coefficients depend on the single crystal parameters, but the group velocity
on the polycrystal’s material parameters.
2.3.1. Reciprocity Relations
We follow [
66] in applying the reciprocity relations for computing the displacement at the receiver’s surface. In [
66], a formalism for scattering of ultrasonic waves at scatterers is derived, in particular for the Born approximation. There, the received signal is defined as the integral over the scatterer’s entire surface. Here, the displacement at the receiver is expressed by the superposition of displacement velocity
and stress tensor
at all scatterers’ positions
:
where
is the normal to the scatterer’ surface. Note that, although we account for one discrete point per scatterer, only, this scatterer is nevertheless assumed to be spherical. Thus, the point first reached by the wave is the one with surface normal pointing towards the transducer. Usually, transmitter and receiver are differentiated [
66,
67]. In our setting of a pulse-echo experiment, the transmitter however equals the receiver.
2.3.2. Modelling of the Bandwidth
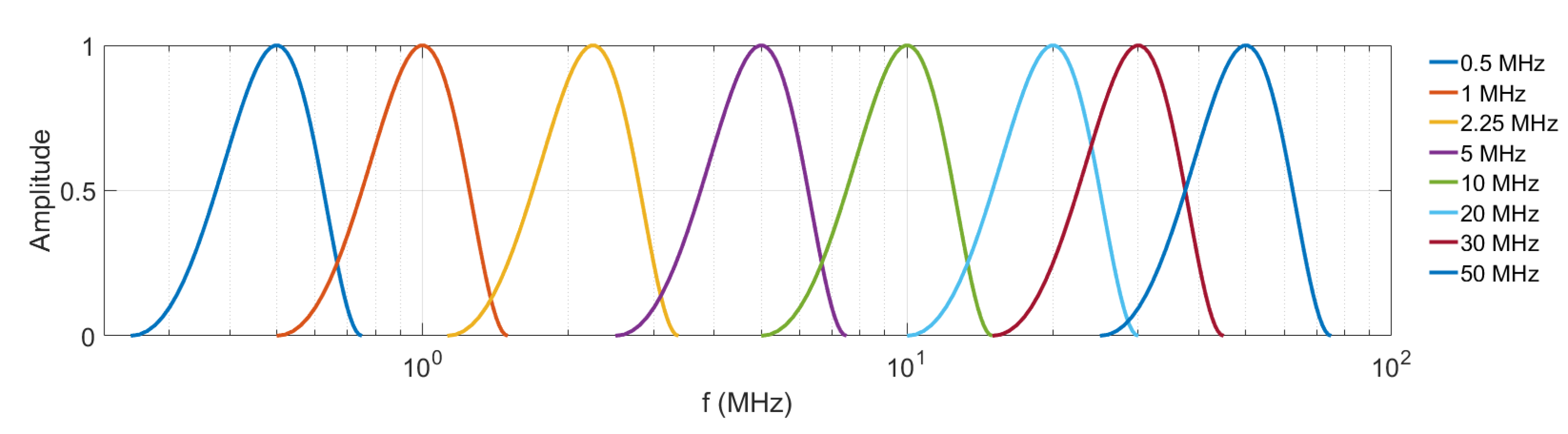
In general, wave propagation is a time-dependent phenomenon. In [
68], transient signals are computed based on the static continuous wave displacement method. We model the bandwidth
by
Basically, we assume a transducer with a mid-band frequency
and model
. This yields the transducer specific harmonic displacement field in Equation (
15) for a bandwidth
.
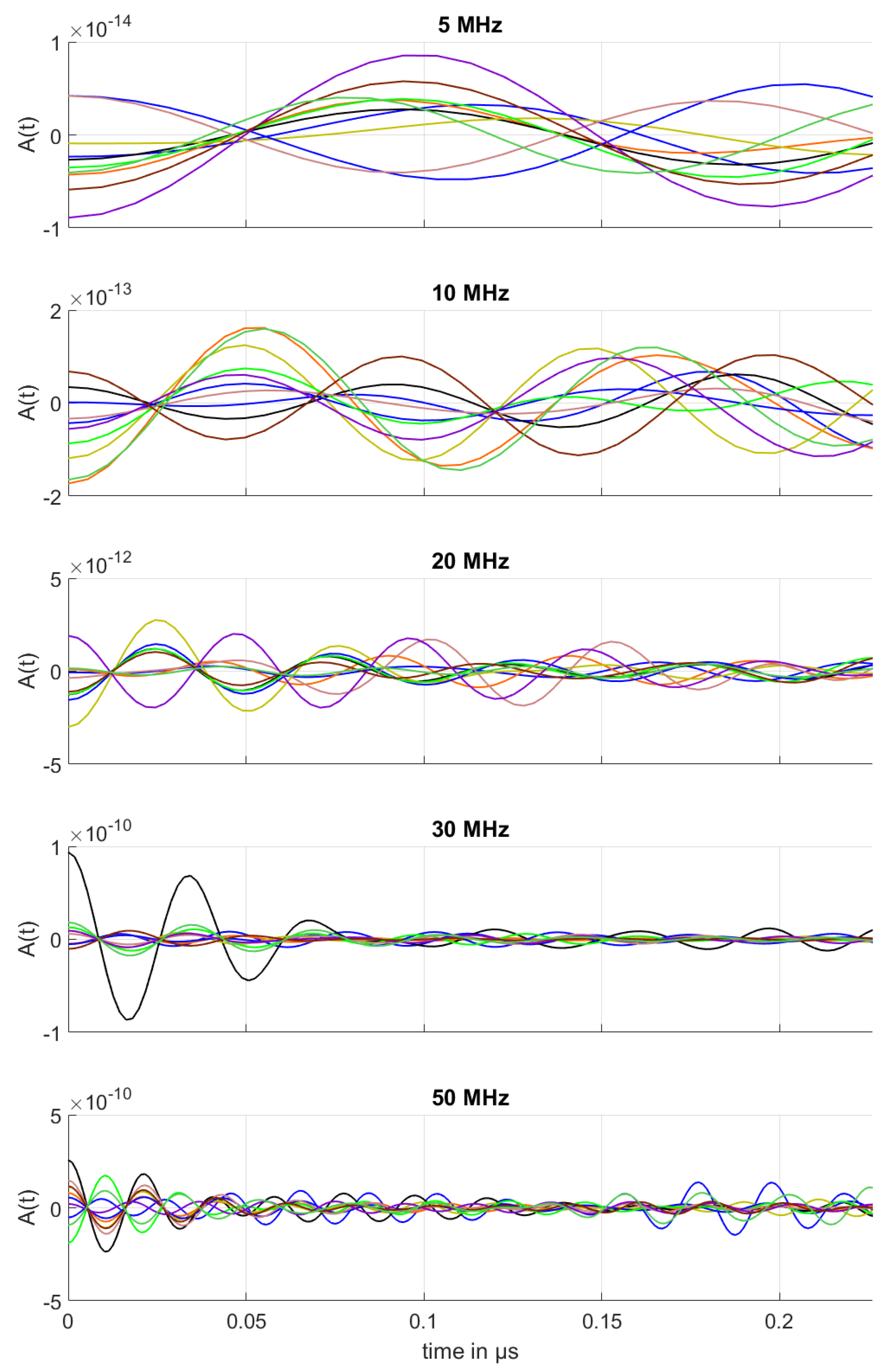
Figure 6 shows the variety of frequencies we use in the following virtual experiments.
In the virtual experiments, we assume the ultrasonic transducer in pulse-echo technique emitting and receiving pressure wave, which mimics varying mid-band frequencies. Finally, we transform the result into the time domain by MATLAB’s inverse Fast Fourier Transform (FFT) [
69,
70].
2.3.3. Evaluation Tools
A microstructure model fit yields a predefined number of microstructure realizations (cell systems) [
5,
52]. We aim at simulating ultrasonic specifics in these cell systems, as scattering. In ultrasonic testing, scattering regimes are roughly characterized in terms of the testing frequency
f, the material dependent wave propagation velocity
, and the effective scatterer diameter
, as follows [
8]:
the low-frequency Rayleigh regime,
the stochastic regime and
the high-frequency geometric limit.
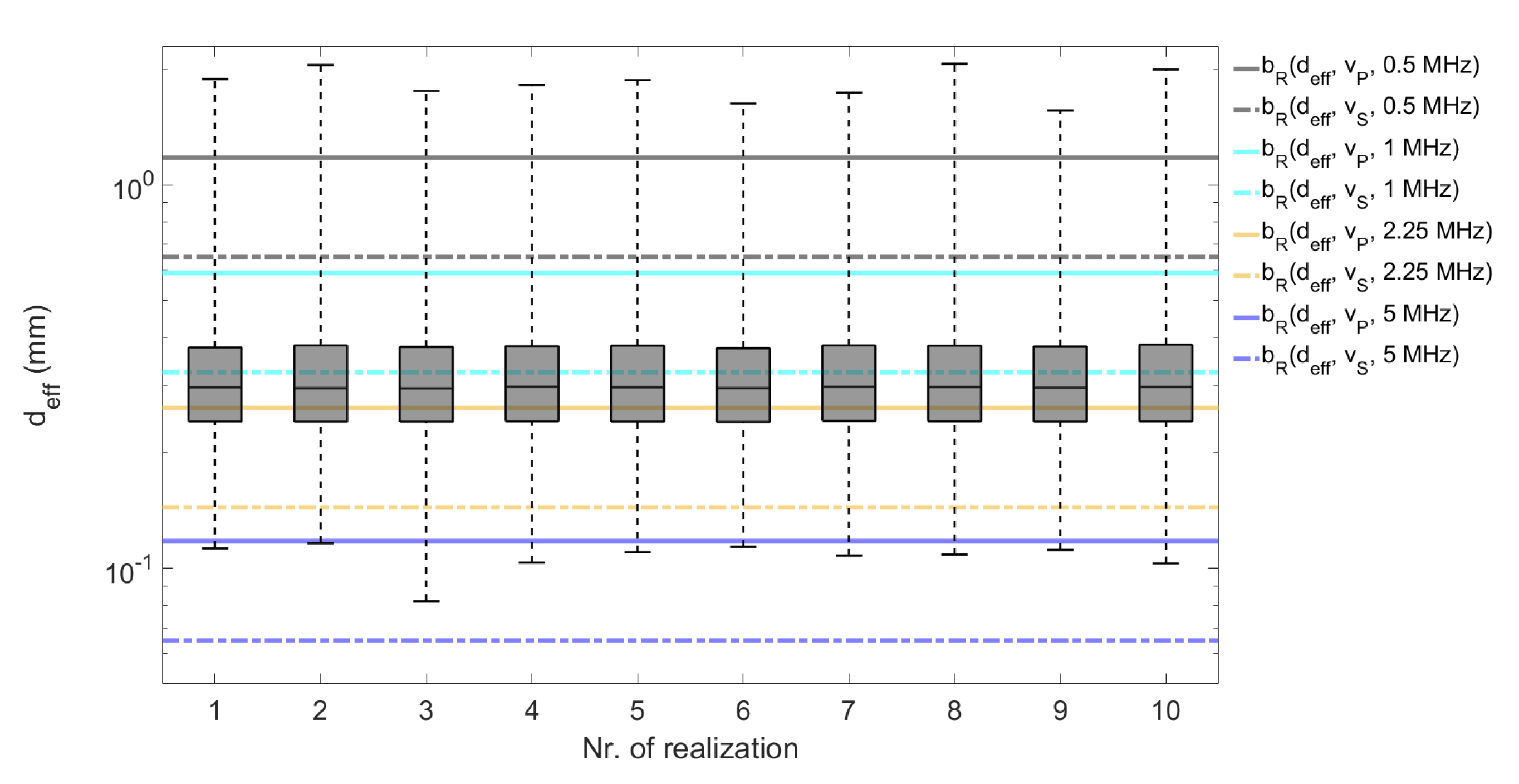
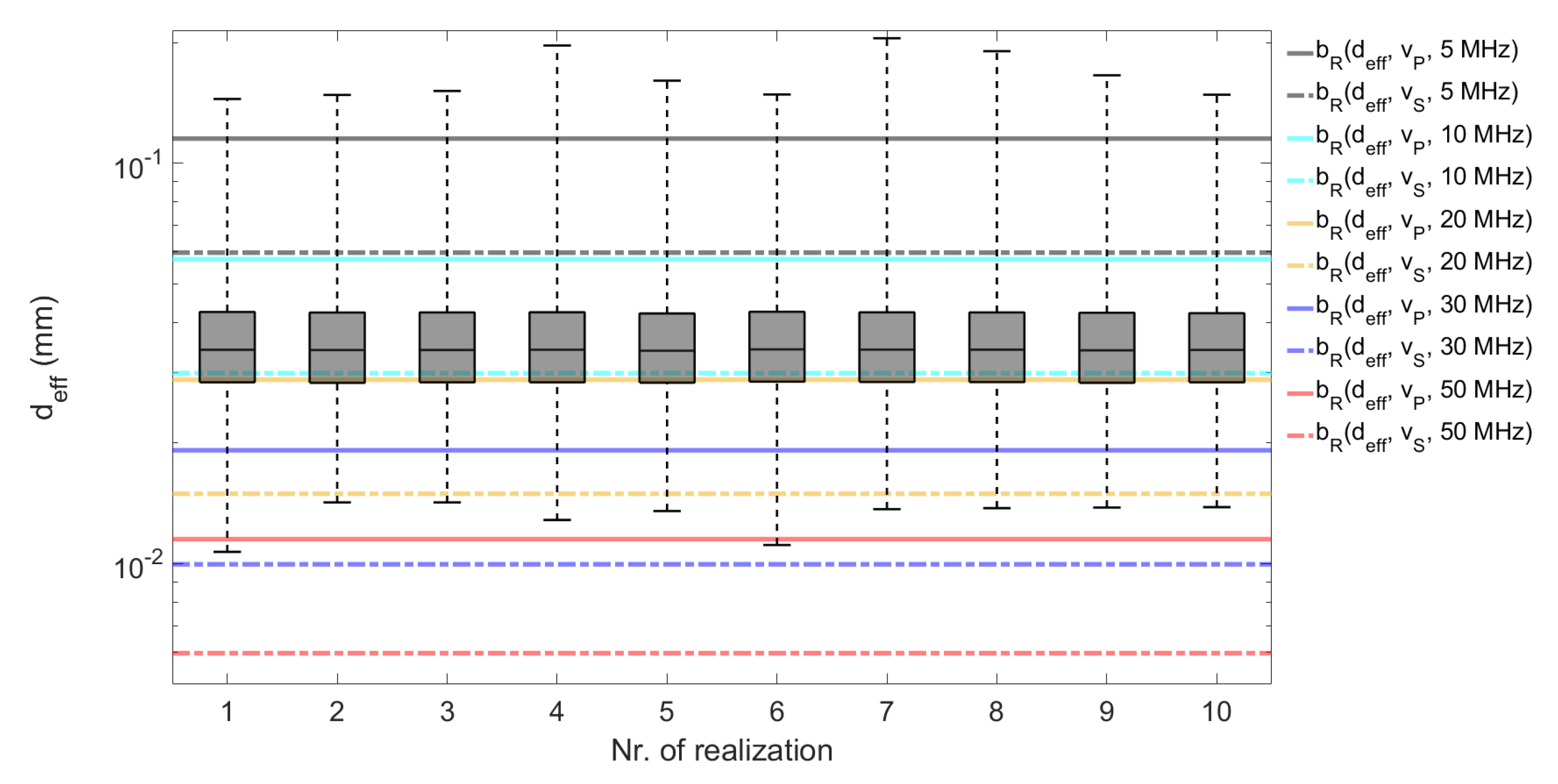
We use the Born approximation to compute backscattered wave contributions, valid in the low-frequency Rayleigh regime [
13]. Accordingly, we set an upper fixed boundary for the Rayleigh regime at 0.3, which yields
By this, we assume that scatterers’ size remains within the Rayleigh regime and the modeled scattering contributions are reasonable. Equation (
16) corresponds to the hypothetical boundary below which the cell’s diameter stays in the Rayleigh scattering regime. We denote this boundary by
and check whether the microstructure realizations observe this boundary.
5. Discussion
We describe here a method for simulating backscattered wave contributions caused by the microstructure of the polycrystal in which the wave propagates. In contrast to previous studies, we fit a microstructure model to image data of real polycrystals. We study two polycrystals—Inconel-617 and titanium—differing significantly in grain size and crystallographic structure. The microstructures of both, the coarse-grained cubic Inconel-617 and the fine-grained hexagonal titanium, are modeled by Laguerre tessellations generated by sphere packings.
Model fitting consists of choosing mean and coefficient of variation of the sphere volumes to meet the observed structures. This is comparably easy in the case where full 3D information from X-ray DCT or 3D EBSD is available. However, the use of these imaging techniques is still rather an exception while 2D micrographs are well-established and accessible in quality assurance labs. For fitting models based on 2D images, parameters have to be determined by systematically testing candidate values within a reasonable search interval as described in
Section 2.2.3. This is costly as many realizations of 3D models have to be generated.
Our spatial scattering function yields grainwise backscattered contributions. This is the main difference to the analytical scattering theory from [
13] predicting backscattering as function of mean grain diameter. Instead, we reveal how a cell system with a certain diameter distribution interacts with waves of varying frequencies. To this end, we simulate a set of time-domain signals.
Our simulations rely on the Born approximation assuming an isotropic grain structure. Inconel and titanium often feature a strongly anisotropic one. Thus, the Born approximation can cause a potentially large error. However, the samples considered here are only mildly anisotropic. Incorporating the anisotropy due to grain shape as well as anisotropy due to crystallographic orientation properly is nevertheless subject of further research.
This work is motivated by the need for simulation techniques for ultrasonic wave propagation including grain noise. Our method is theoretically well described, has however not been validated by real experiments. To enable exactly this comparison, further work is needed. To compare our simulation results to the experimental ones of [
77,
78] for titanium, a modelling of microstructure with elongated grains is needed. For Inconel [
32], the virtual experiment has to be extended by a reflection at a back wall of the sample. The major obstacle is however the need for a microstructure model realization covering at least three centimeters in each coordinate direction. This demands a tessellation with about one million cells, 64 times larger than the current model realization with 16,000 cells. Thus, the computations would take days if not even weeks. Finally, to allow for proper estimation of detection probabilities, defect echos have to be simulated and compared to measured ultrasonic signals.
Another point deserving further investigation is, how representative the simulated ultrasonic signals are. The microstructures are modeled by random tessellations. Thus, the realizations have to include enough cells to satisfy the law of large numbers for cell statistics. This condition is well satisfied with altogether more than 100,000 cells in each of the two model fits. However, we simulate just ten time-domain signals for each material. This might not be sufficient to capture the variability of the ultrasonic signal.
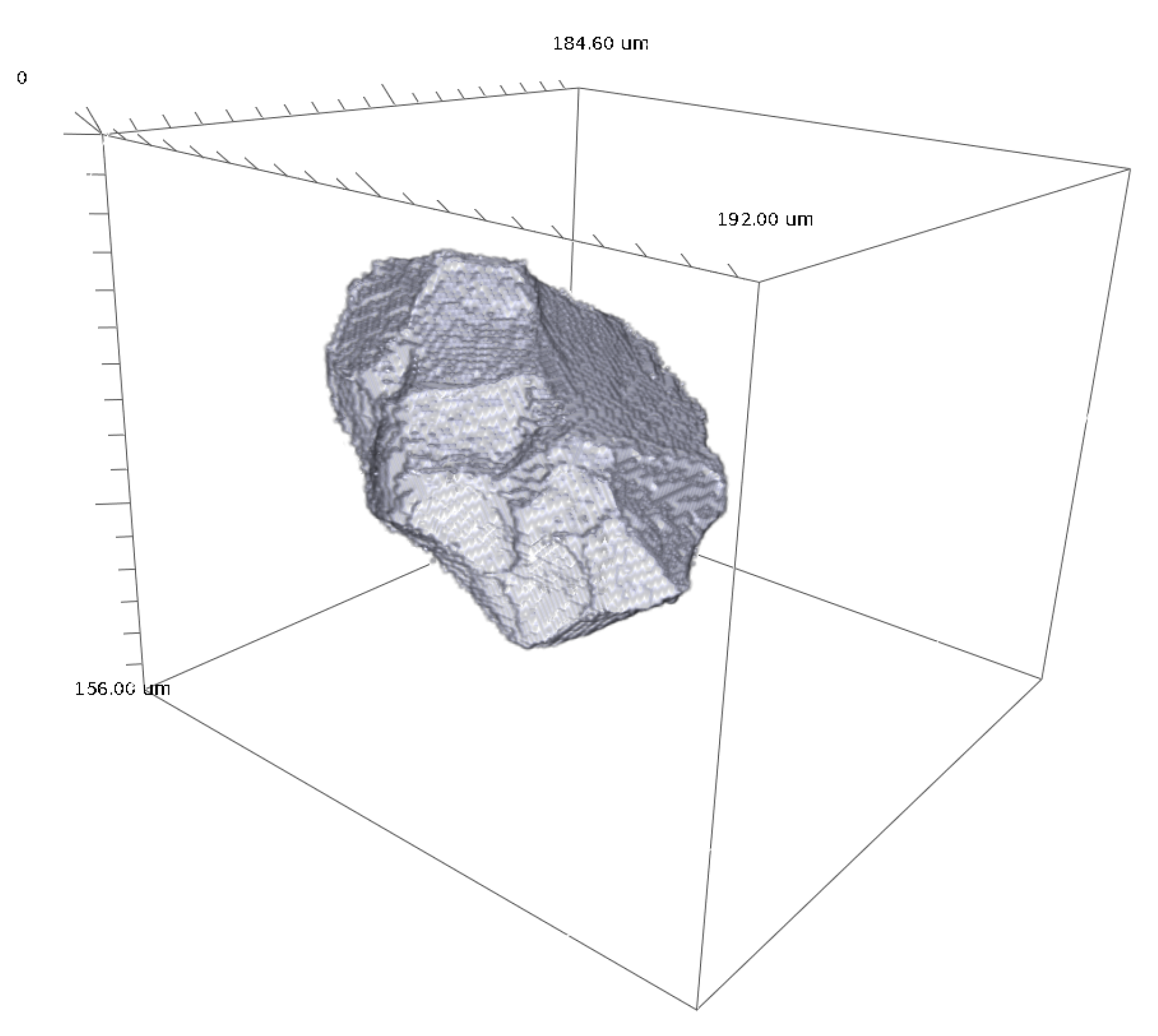
We build on [
13], where the grains are approximated as closely packed spherical scatterers accounting for just single backscattered contributions. The scatterer’s shapes and orientations are thus ignored for the moment. The effect of the shapes might however be non-negligible, in particular for coarse granular microstructures. We assume the grains to be Laguerre tessellation cells, thus convex polytopes. The 3D DCT data of the titanium nevertheless reveals non-convex grains. More elaborate models for polycrystalline microstructures allowing for non-convex cells and curved grain boundaries have been developed [
14,
15,
16,
17,
18,
19,
20,
21]. These could be used for ultrasonic simulation, too. The DCT data also yields the crystallographic grain orientations. In order to exploit this structural information in the ultrasonic simulations, the spatial scattering functions need to be reformulated. In particular, the correlation function would have to account for eventually observed grain orientation correlations.
This paper is one step forward towards simulation of realistic grain noise in ultrasonic testing. Many more—most prominent considerable enlargement of the microstructure model realizations, incorporation of grain orientations, simulation of multiple scattering—wait to be conquered before simulated and experimental results can be compared quantitatively.
6. Conclusions
Ultrasonic testing is a popular, indispensable non-destructive testing technique. Its proper use relies heavily on simulations in order to interpret the received signals correctly. Simulation of ultrasonic wave propagation is therefore a vivid field of research.
This work focuses on polycrystalline materials and a method to account for the so-called grain noise caused by scattering of the propagating wave by the grain boundaries. Building on [
13], we simulate backscattered wave contributions of the individual grains forming the polycrystal. To this end, the grain structure is modeled by a Laguerre tessellation model. Compared to the Voronoi tessellation used in previous attempts, using this more versatile type of model increases the effort for microstructure modelling considerably, enables however to capture the real grain size distribution much better. This is demonstrated here for two real metal alloy samples.
As discussed in
Section 5 above, the method presented here needs generalizations in many ways before yielding simulated ultrasound signals that can be quantitatively compared to measured ones. We see it rather as a door opener towards realistic microstructure modeling in ultrasound simulation. We nevertheless achieved practically valuable results, too. In particular, the explicit relation of testing frequency, cell sizes, and Rayleigh boundary derived in
Section 4.1.2 and
Section 4.2.2. The spatial scattering functions and their shapes as shown in
Figure 13 and
Figure 18 shed a new light on the structure signal interaction and thus are of value on their own, too.
To summarize, we combined Hirsekorn’s [
13] single scattering theory with explicit microstructure modeling using Laguerre tessellations to make considerable progress on the way to realistic grain noise simulation in ultrasonic testing.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}