
One-Way Vibration Absorber


Abstract
:1. Introduction
2. Derivation of the One-Way Wave Equation and One-Way Horn Equation
2.1. Conversion from the Two-Way Wave Equation to the One-Way Wave Equation
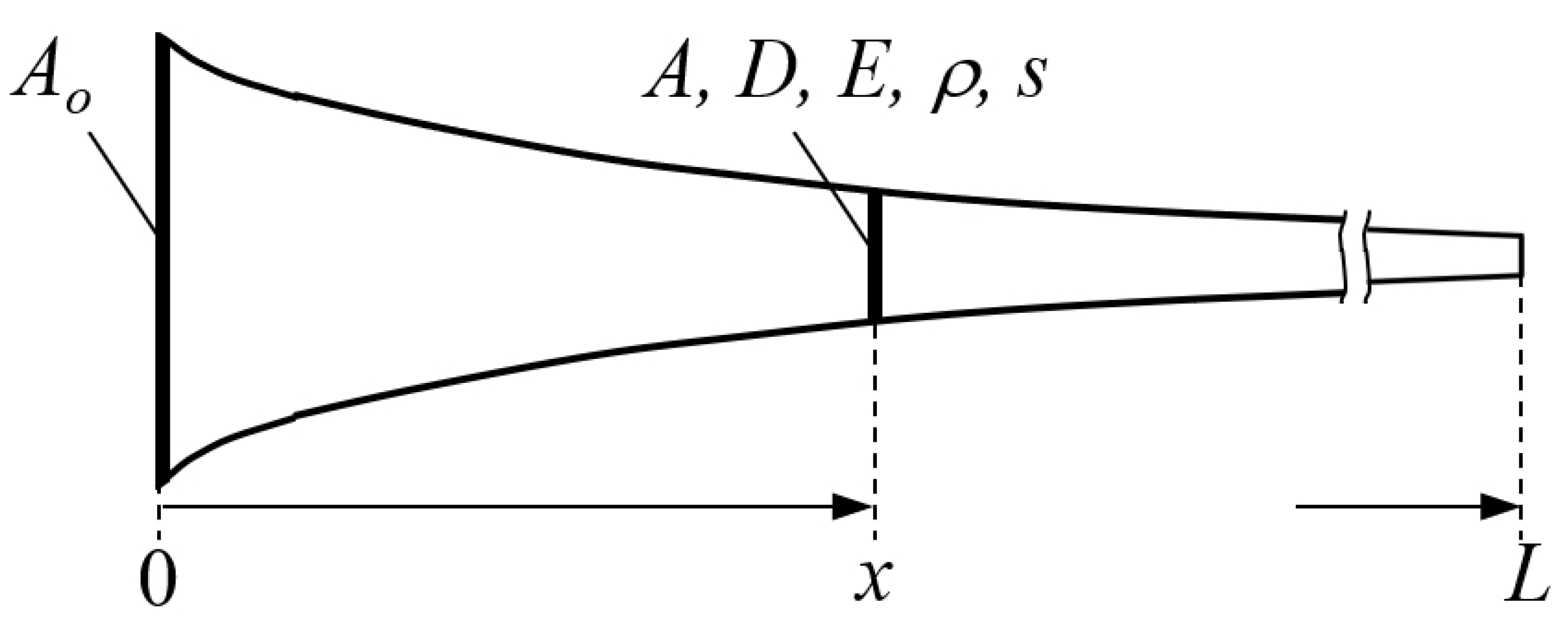
2.2. Introduction of the One-Way Webster Horn Equation
3. One-Way Vibration Absorber: Resulting Equations, Solutions and Impedances
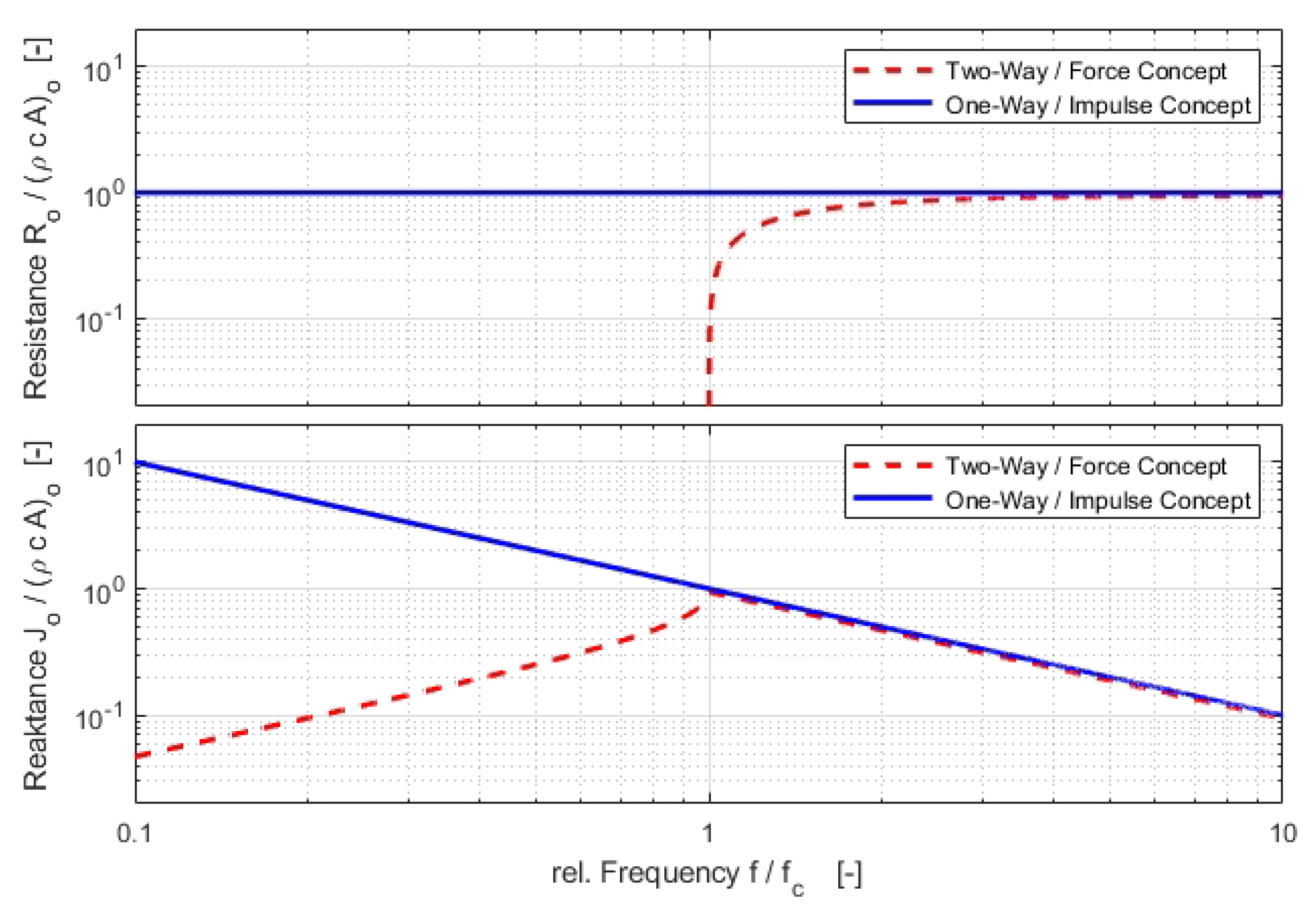
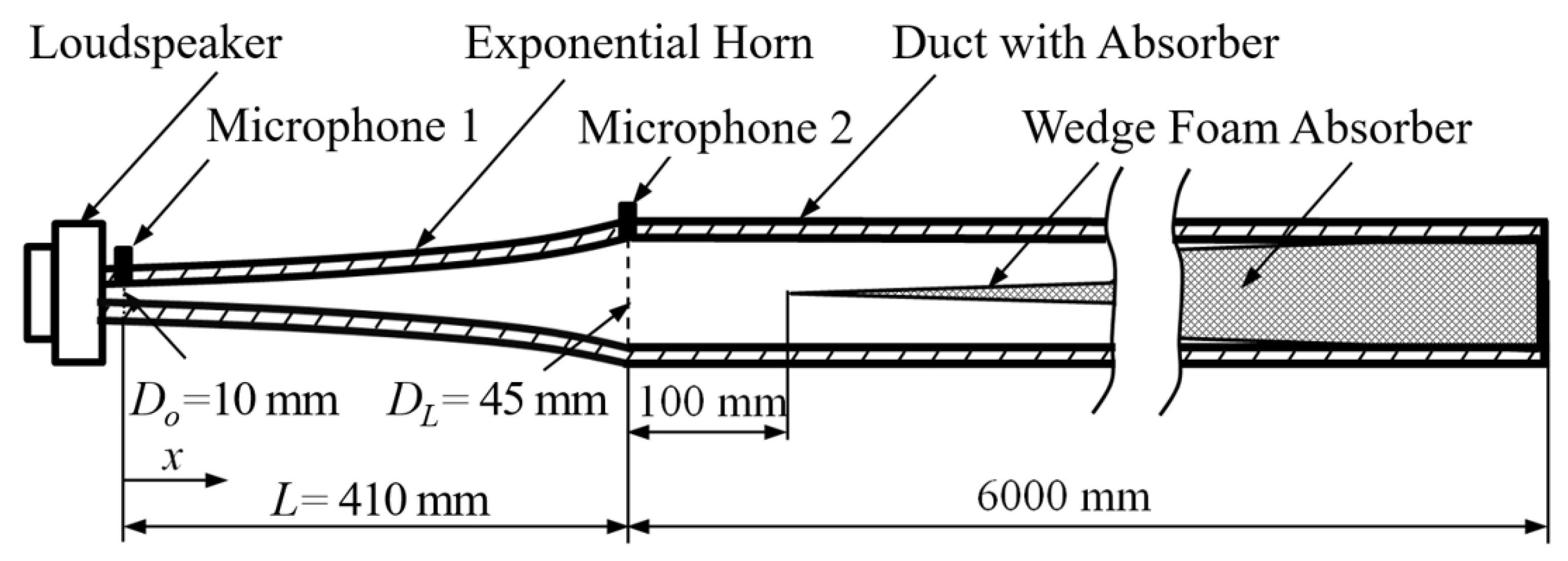
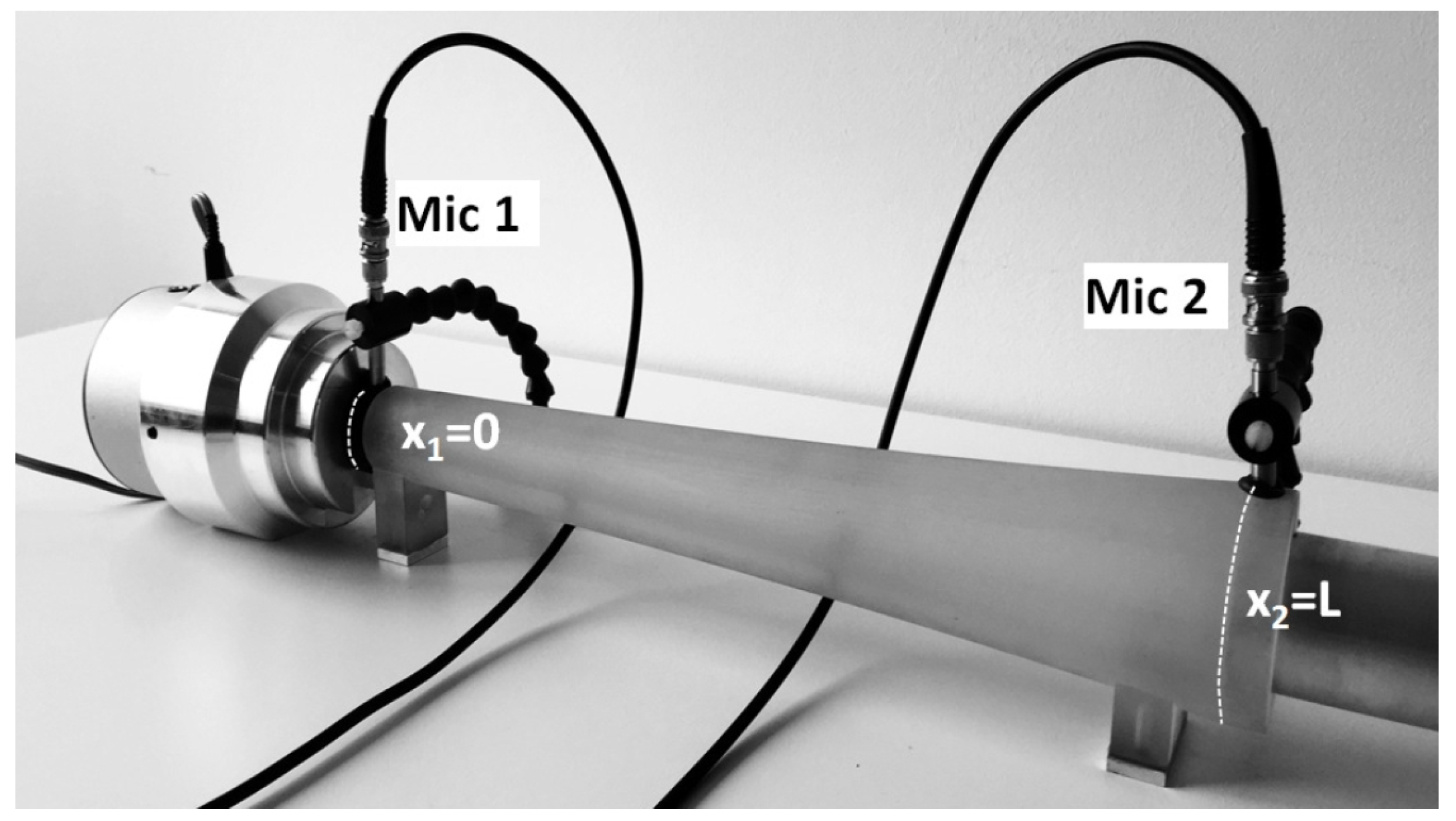
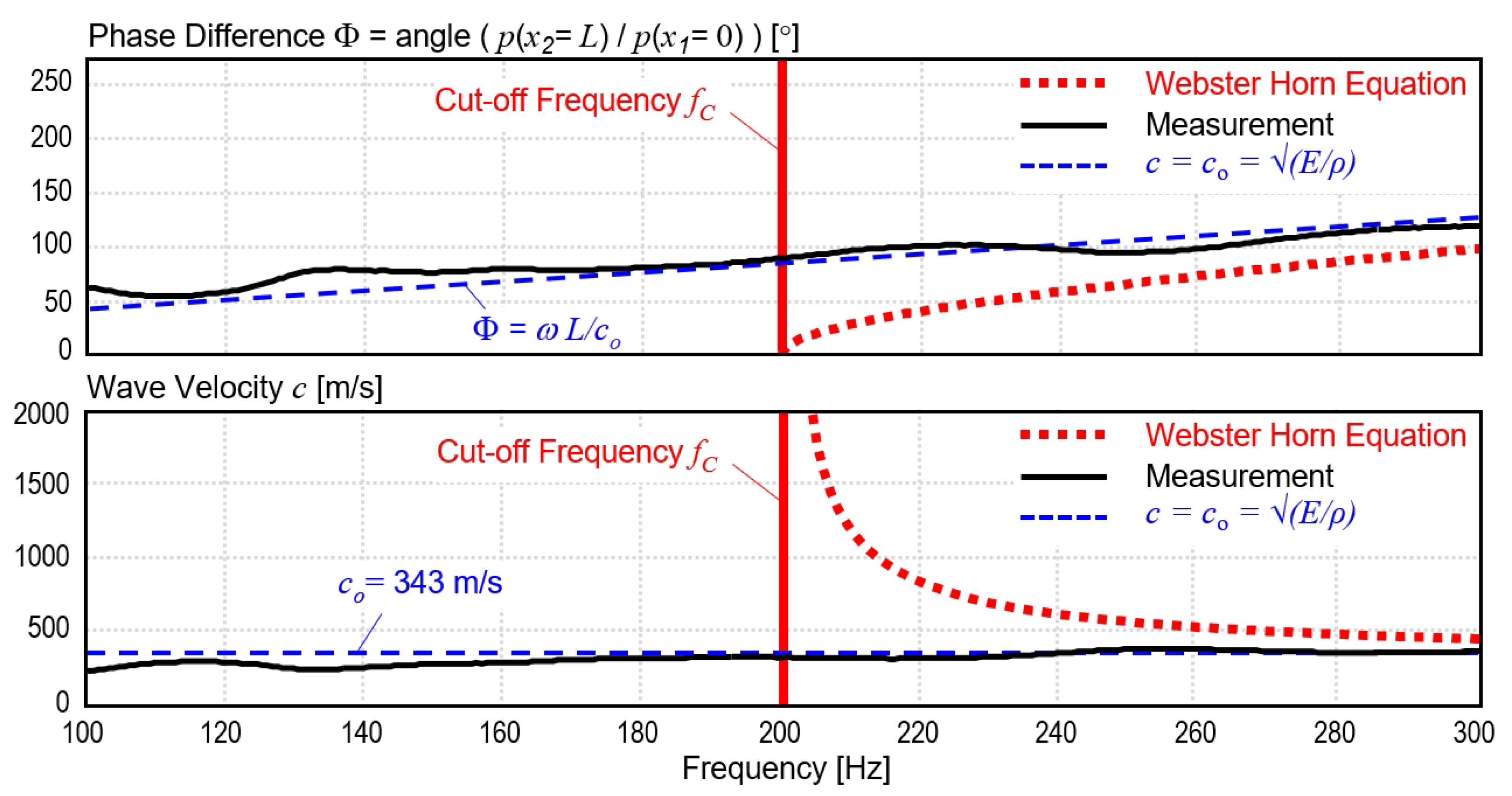
4. Comparison of Two-Way/One-Way Predictions vs. Measurement
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mironov, M.A. Propagation of a flexural wave in a plate whose thickness decreases smoothly to zero in a finite interval. Sov. Phys. Acoust. 1988, 34, 318–319. [Google Scholar]
- Krylov, V.V. New type of vibration dampers utilising the effect of acoustic black holes. Acta Acust. United Acust. 2004, 90, 830–837. [Google Scholar]
- European Patent Office, Patent Database, Search for “Acoustic Black Hole”. 2022. Available online: https://worldwide.espacenet.com/patent/search/?q=ctxt%20%3D%20%22Acoustic%20black%20hole%22 (accessed on 1 May 2022).
- Pelat, A.; Gautier, F.; Conlon, S.C.; Semperlotti, F. The acoustic black hole: A review of theory and applications. J. Sound Vib. 2020, 476, 115316. [Google Scholar] [CrossRef]
- Maysenhölder, W. Perfekte Absorption ohne Dämpfung: Schön wär’s! [Perfect Absorption w/o damping: Would be great!]. In Proceedings of the 20th Workshop Physical Acoustics “Sound propagation in inhomogeneous Media”, Bad Honnef, Germany, 14–15 November 2013. [Google Scholar]
- Bschorr, O. Schwingungsdämpfer für Körperschall [Vibration Absorber for Structure-Borne Noise]. DE Patent DE2229420A1, 14 February 1974. [Google Scholar]
- Bschorr, O. Breitbandiger Schwingungsdämpfer [Broadband Vibration Absorber]. DE Patent DE2412672A1, 18 September 1975. [Google Scholar]
- Bschorr, O.; Albrecht, H. Schwingungsabsorber zur Reduzierung des Maschinenlärms [Vibration Absorber for the Reduction of Machine Noise]. VDI-Zeitschrift 1979, 121, 253. [Google Scholar]
- Betgen, B.; Bouvet, P.D.; Thompson, J.; Demilly, F.; Gerlach, T. Assessment of the efficiency of railway wheel dampers using laboratory methods within the STARDAMP project. In Proceedings of the Acoustics 2012 Nantes Conference, Nantes, France, 23–27 April 2012; pp. 3733–3738. [Google Scholar]
- Weber, W.; Paluszkiewicz, M.; Albrecht, H.; Brühl, S.; Bschorr, O.; Masche, A.G. Messerschmidt Bölkow Blohm: Körperschalldämpfer für ein Laufrad [Vibration Damper for a Wheel]. DE Patent DE3119497A1, 9 December 1982. [Google Scholar]
- Gerlach, T.; Notthoff, N. Gutehoffnungshütte Radsatz GmbH: Schallabsorber-Element und Schallabsorber für ein Schienenfahrzeug-Rad sowie damit ausgestattetes Rad [Sound Absorber Element and Sound Absorber for a Railway Wheel and a Respectively Equipped Wheel]. EP1892122B1, 27 February 2008. [Google Scholar]
- Gramowski, C.; Gerlach, T. Entering the Real Operation Phase: Design, Construction and Benefit Verification of Freight Wheel Noise Absorber. In Proceedings of the 13th International Workshop on Railway Noise, Ghent, Belgium, 16–20 September 2019. [Google Scholar]
- Schrey&Veit. Product Brochures: Rail Dampers, Innovative Noise Mitigation on Railways; Product Information about Raildampers VICON AMSA 54 FS; Schrey&Veit: Sprendlingen, Germany, 2022. [Google Scholar]
- Gramowski, C. Schienendämpfer, Warum variiert die Lärmreduktion? [Rail damper, why varies the noise noise reduction?]. EI-Eisenbahningenieur 2013, 64, 70–75. [Google Scholar]
- Betgen, B.; Bouvet, P.; Squicciarini, G.; Thompson, D.J. The STARDAMP Software: An Assessment Tool for Wheel and Rail Damper Efficiency. In Proceedings of the AIA-DAGA 2013 Conference on Acoustics, Merano, Italy, 18–21 March 2013; p. 4. [Google Scholar]
- Bschorr, O. Deviationswellen in Festkörpern [Devitation Waves in Solids]. In Proceedings of the DAGA 2014—40th German Annual Conference of Acoustics, Oldenburg, Germany, 10–13 March 2014; pp. 80–81. [Google Scholar]
- Bschorr, O.; Raida, H.-J. One-Way Wave Equation Derived from Impedance Theorem. Acoustics 2020, 2, 167–170. [Google Scholar] [CrossRef]
- Bschorr, O.; Raida, H.-J. Factorized one-way Wave Equations. Acoustics 2021, 3, 717–722. [Google Scholar] [CrossRef]
- Pierce, A. Acoustics: An Introduction to its Physical Principles and Applications; Acoustical Society of America through the American Institute of Physics: Woodbury, NY, USA, 1994; p. 360. [Google Scholar]
- Bschorr, O. Wellenleitung im eindimensionalen Festkörper [Wave Propagation in one-dimensional solids]. In Proceedings of the DAGA 2015—41th German Annual Conference of Acoustics, Nürnberg, Germany, 16–19 March 2015; pp. 828–829. [Google Scholar]
- Lerch, R.; Sessler, M.; Wolf, D. Technische Akustik, Grundlagen und Anwendungen [Technical Acoustics, Foundations and Applications]; Springer: Berlin, Germany, 2009; p. 136. [Google Scholar]
- Bschorr, O. Hornleiter nach dem Impulskonzept [Horn Waveguide according to the Impulse Concept]. In Proceedings of the DAGA 2016—42th German Annual Conference of Acoustics, Aachen, Germany, 14–17 March 2016; pp. 268–269. [Google Scholar]
- Raida, H.-J.; Bschorr, O. Konventionelles Kräftegleichgewicht vs. hypothetisches Impulsflussgleichgewicht [Conventional force equilibrium vs. hypothetical impulse flow equilibrium]. In Proceedings of DAGA 2018–44th German Annual Conference of Acoustics, Munich, Germany, 19–22 March 2018; pp. 828–831. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Generic | Homogeneous | Cylindrical | |
|---|---|---|---|---|
| Plane Wave | Waveguide | Waveguide | Waveguide | |
| Material | , | , | . | , |
| Contour | ||||
| 3D Equation | ||||
| 1D Equation | ||||
| 1D Solution | ||||
| Impedance | ||||
| Resistance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bschorr, O.; Raida, H.-J. One-Way Vibration Absorber. Acoustics 2022, 4, 554-563. https://doi.org/10.3390/acoustics4030034
Bschorr O, Raida H-J. One-Way Vibration Absorber. Acoustics. 2022; 4(3):554-563. https://doi.org/10.3390/acoustics4030034
Chicago/Turabian StyleBschorr, Oskar, and Hans-Joachim Raida. 2022. "One-Way Vibration Absorber" Acoustics 4, no. 3: 554-563. https://doi.org/10.3390/acoustics4030034
APA StyleBschorr, O., & Raida, H. -J. (2022). One-Way Vibration Absorber. Acoustics, 4(3), 554-563. https://doi.org/10.3390/acoustics4030034