
Trampling Analysis of Autonomous Mowers: Implications on Garden Designs

 ,
,  , ,
, ,  ,
, 


Abstract
:1. Introduction
2. Materials and Methods
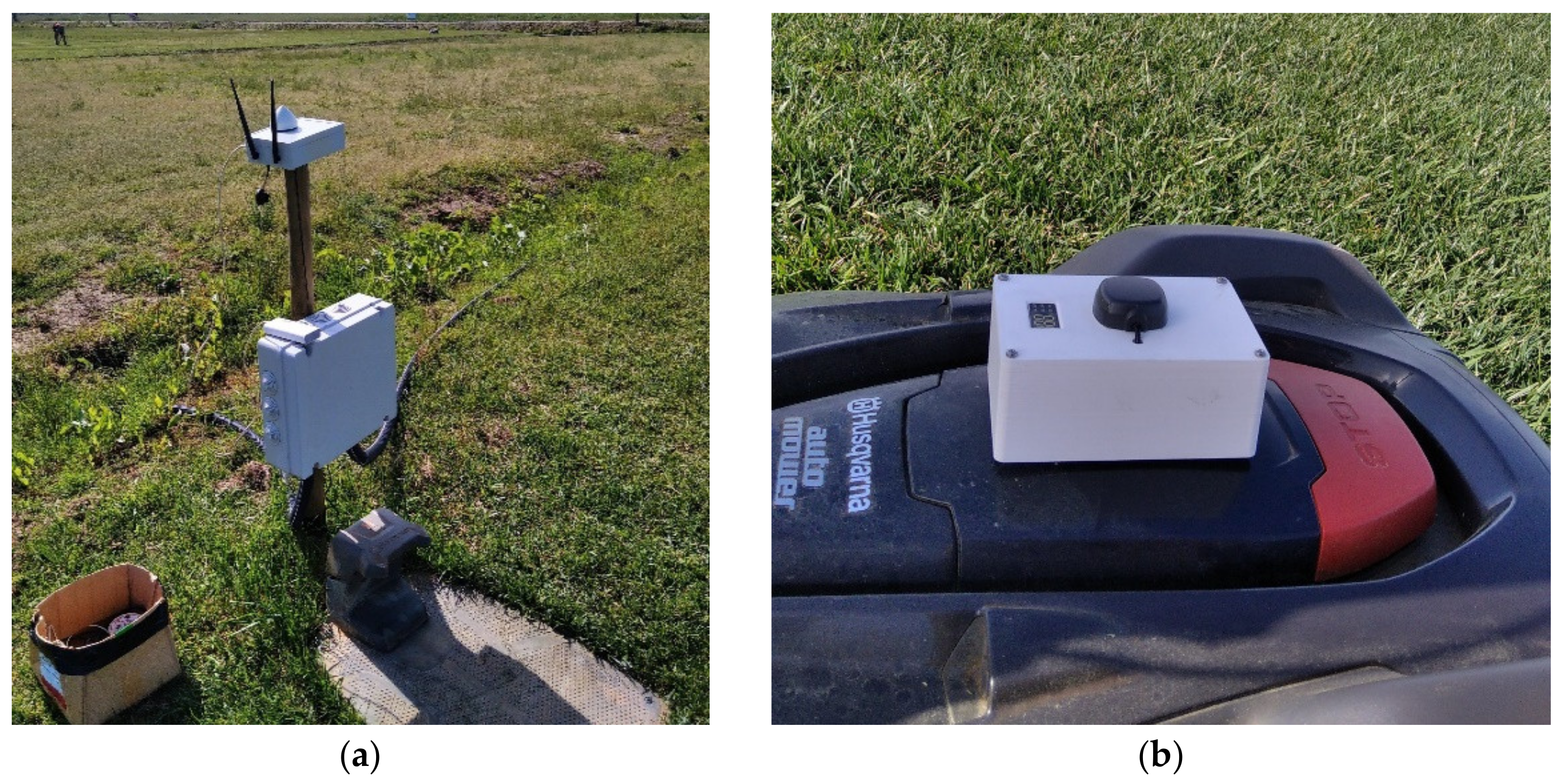
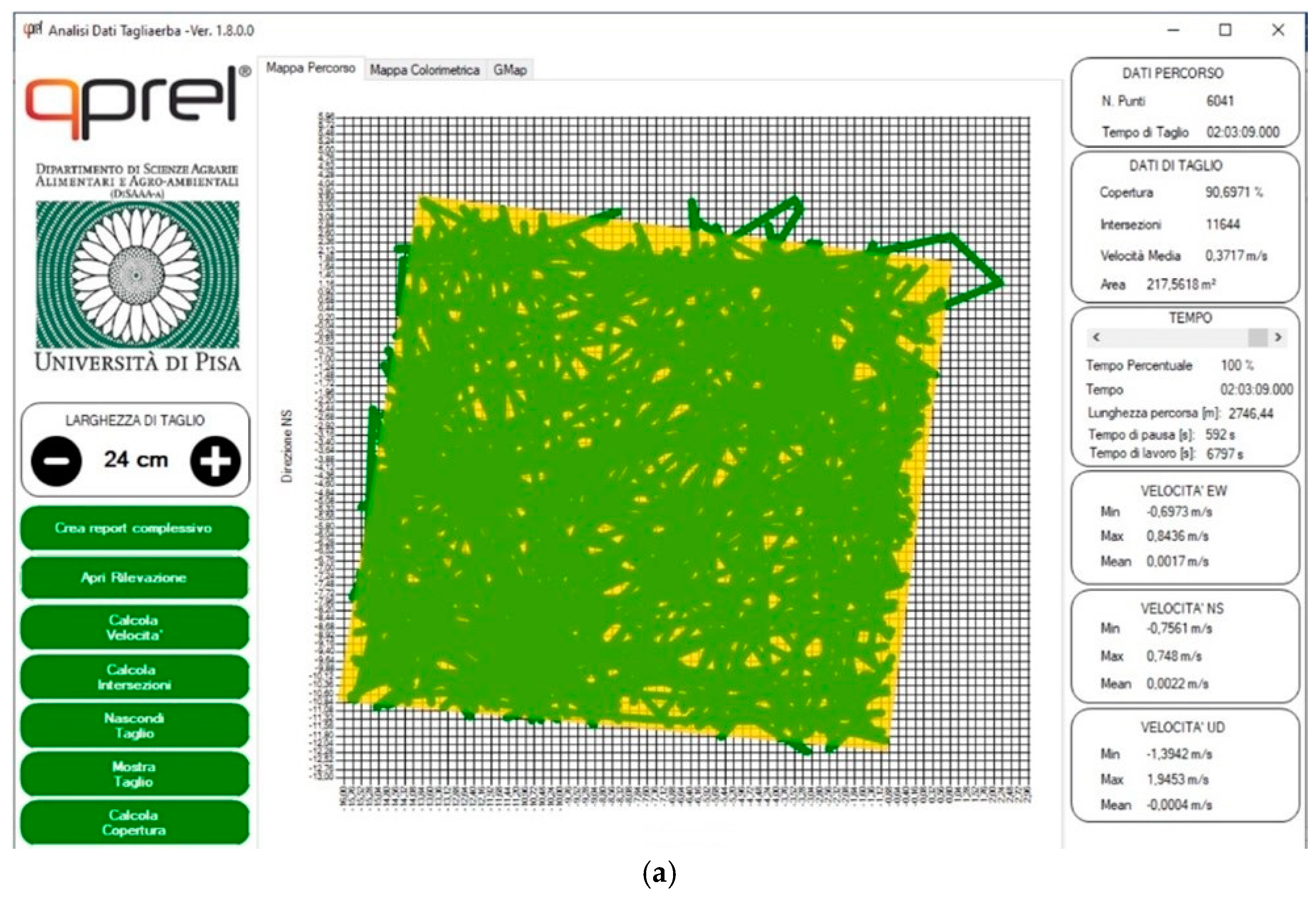
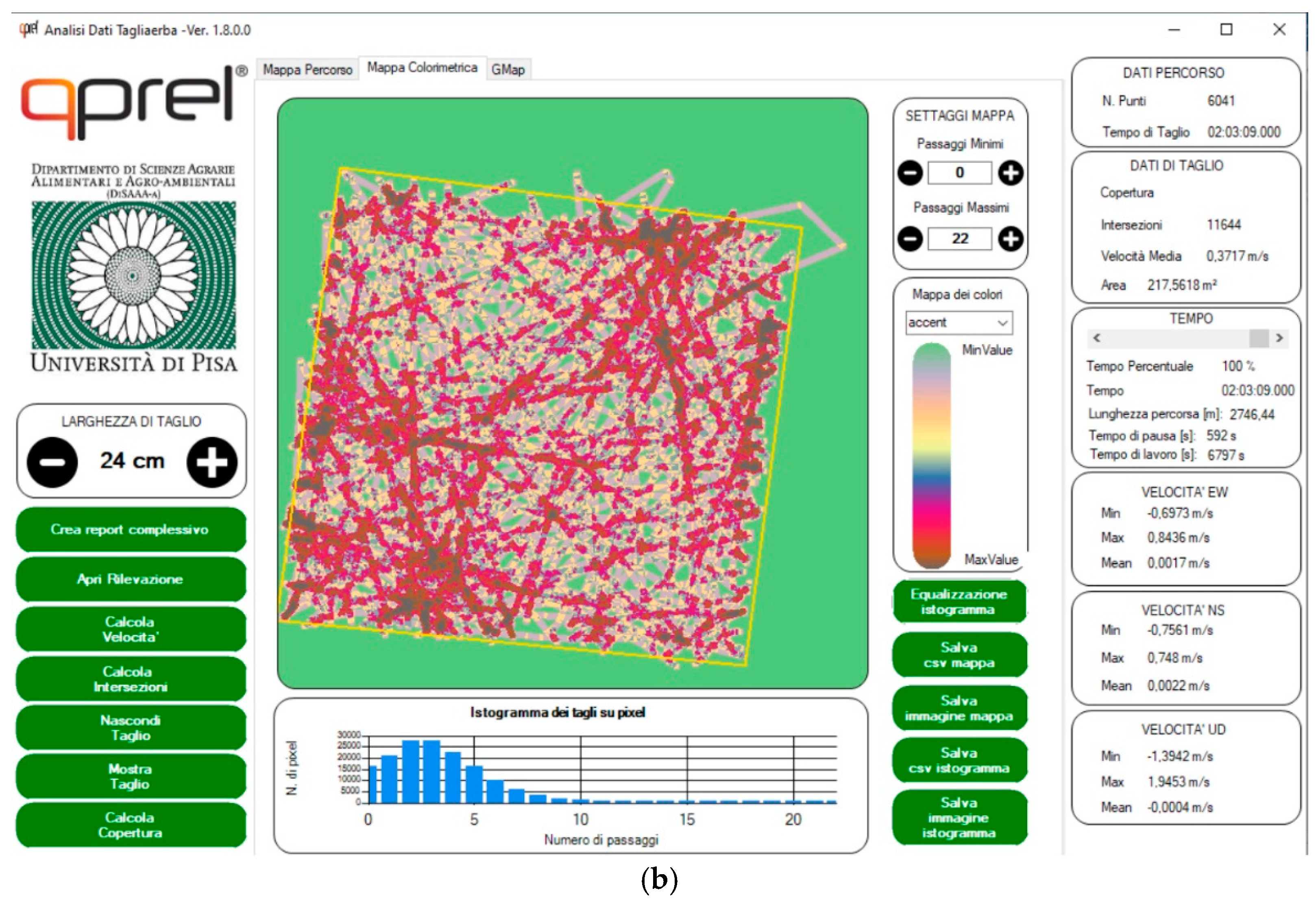
2.1. Remote Sensing System and Software
2.2. Experimental Field Trials
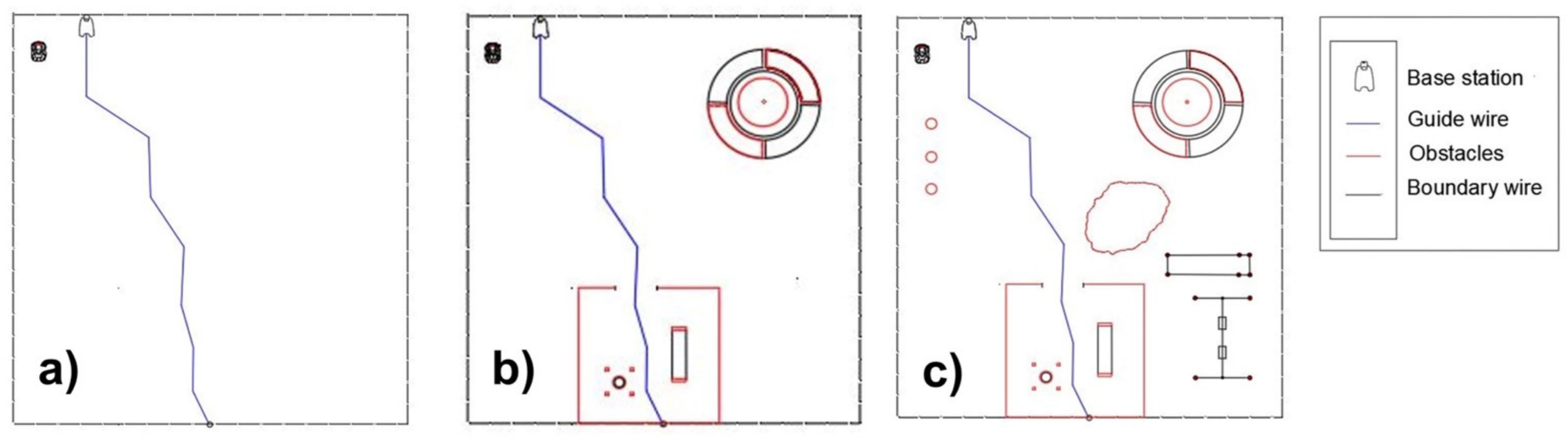
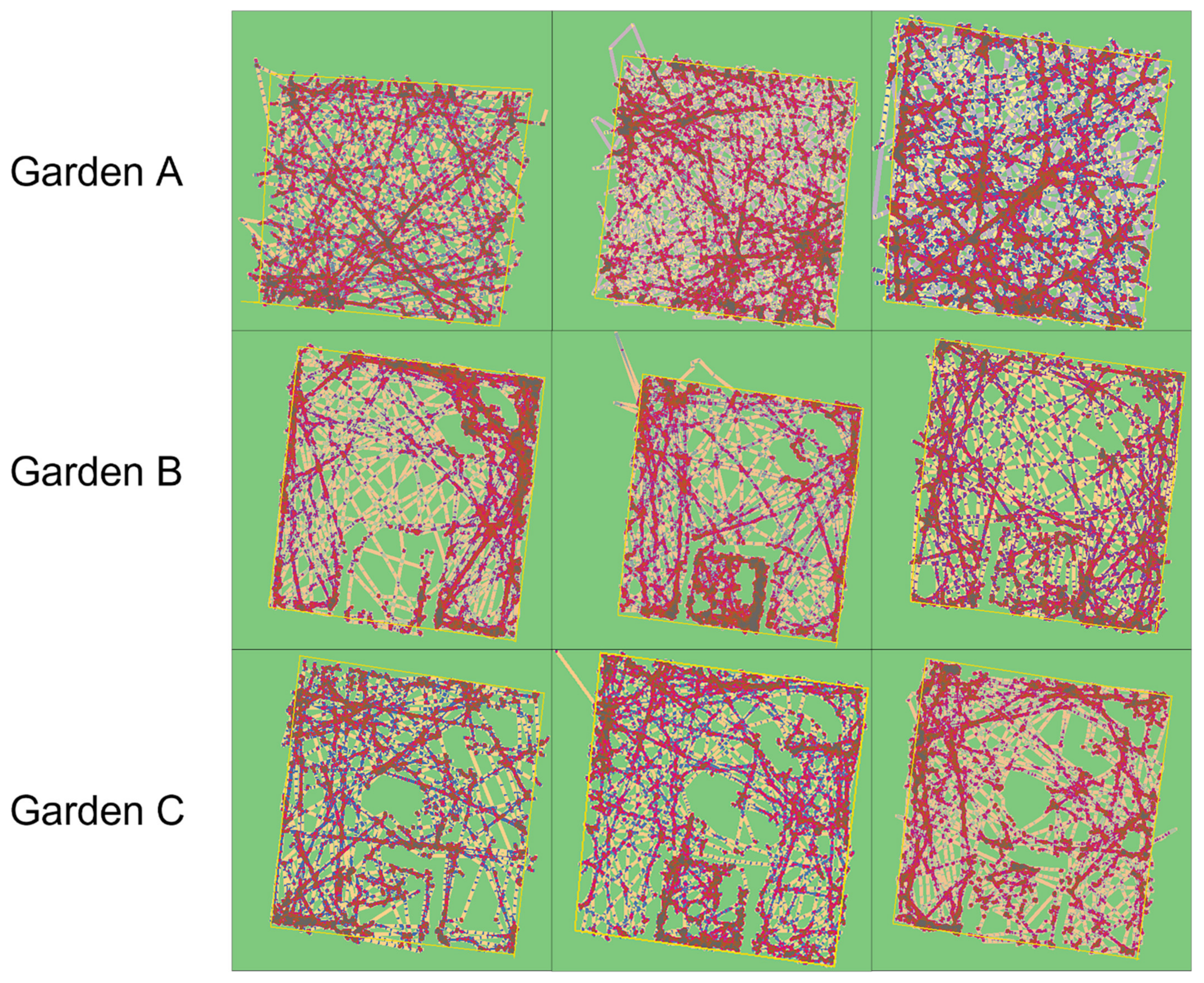
- Garden A (Figure 3a) consisted of a 210 m2 area with no obstacles.
- Garden B (Figure 3b) consisted of a 210 m2 area with a low level of complexity. To achieve this slight complexity, three obstacles were simulated using wooden poles. The three obstacles were supposed to be a circular bench (diameter 4 m), a 25 m2 (5 m × 5 m) barbecue area and a rectangular bench (length 2 m × width 0.50 m). In the upper right corner, a circular bench (diameter 0.45 m, thickness 0.50 m and height 0.60 m) and a Lagerstroemia indica (L.) tree are placed in the middle (diameter 0.90 m for the roots) and 2 Delosperma cooperi (Hook.f.) L. pots (0.70 m2 and height 0. 60 m).
- Garden C (Figure 3c) consisted of a 210 m2 area containing all the features of Garden 2 and, in addition, 3 shrubs of Forsythia spp. (Vahl) spaced at 1.20 m from each other, a swing of 3 m × 2 m placed close to a slide (length 3.10 m and width 0.40 m) and a lake of approximately 2.30 m2 of total width.
2.3. Assessements and Statistical Analysis
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Stowell, L.; Gelernter, W. Sensing the future. Golf Course Manag. 2006, 74, 107–110. [Google Scholar]
- Bell, G.E.; Xiong, X. The history, role, and potential of optical sensing for practical turf management. In Handbook of Turfgrass Management and Physiology; Pessaraki, E., Ed.; CRC Press: Boca Raton, FL, USA, 2008; pp. 641–660. [Google Scholar]
- Carrow, R.N.; Krum, J.M.; Flitcroft, I.; Cline, V. Precision turfgrass management: Challenges and field applications for mapping turfgrass soil and stress. Precis. Agric. 2010, 11, 115–134. [Google Scholar] [CrossRef]
- Krum, J.M.; Carrow, R.N.; Karnok, K. Spatial Mapping of Complex Turfgrass Sites: Site-Specific Management Units and Protocols. Crop Sci. 2010, 50, 301–315. [Google Scholar] [CrossRef]
- Magni, S.; Sportelli, M.; Grossi, N.; Volterrani, M.; Minelli, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Gaetani, M.; Martelloni, L.; et al. Autonomous mowing and turf-type bermudagrass as innovations for an environment-friendly floor management of a vineyard in coastal tuscany. Agriculture 2020, 10, 189. [Google Scholar] [CrossRef]
- Tzoulas, K.; Korpela, K.; Venn, S.; Yli-Pelkonen, V.; Kaźmierczak, A.; Niemela, J.; James, P. Promoting ecosystem and human health in urban areas using Green Infrastructure: A literature review. Landsc. Urban Plan. 2007, 81, 167–178. [Google Scholar] [CrossRef] [Green Version]
- Masoudi, M.; Tan, P.Y.; Liew, S.C. Multi-city comparison of the relationships between spatial pattern and cooling effect of urban green spaces in four major Asian cities. Ecol. Indic. 2019, 98, 200–213. [Google Scholar] [CrossRef]
- Keniger, L.E.; Gaston, K.J.; Irvine, K.N.; Fuller, R.A. What are the benefits of interacting with nature? Int. J. Environ. Res. Public Health 2013, 10, 913–935. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yang, Q.; Duan, L. Adjusting the structure combinations of plant communities in Urban greenspace reduced the maintenance energy consumption and GHG emissions. J. Environ. Eng. Landsc. Manag. 2018, 26, 261–274. [Google Scholar] [CrossRef]
- Jo, H.K.; McPherson, G.E. Carbon Storage and Flux in Urban Residential Greenspace. J. Environ. Manag. 1995, 45, 109–133. [Google Scholar] [CrossRef] [Green Version]
- Beard, J.B.; Green, R.L. The Role of Turfgrasses in Environmental Protection and Their Benefits to Humans. J. Environ. Qual. 1994, 23, 452–460. [Google Scholar] [CrossRef] [Green Version]
- Yue, C.; Wang, J.; Watkins, E.; Bonos, S.A.; Nelson, K.C.; Murphy, J.A.; Meyer, W.A.; Horgan, B.P. Heterogeneous Consumer Preferences for Turfgrass Attributes in the United States and Canada. Can. J. Agric. Econ. 2017, 65, 347–383. [Google Scholar] [CrossRef]
- Ragonese, A.; Marx, J. The applications of sensor technology in the design of the autonomous robotic lawn mower, Paper No. 5094. In Proceedings of the 15th Annual Freshman Engineering Conference, Pittsburgh, PA, USA, 11 April 2015. [Google Scholar]
- Hicks, R.W.; Hall, E.L. Survey of robot lawn mowers. In Proceedings of the SPIE 4197, Intelligent Robots and Computer Vision XIX: Algorithms, Techniques, and Active Vision, Boston, MA, USA, 5–8 November 2000. [Google Scholar]
- Bernardi, B.; Quendler, E.; Benalia, S.; Mantella, A.; Zimbalatti, G. Occupational risks related to vibrations using a brush cutter for green area management. Ann. Agric. Environ. Med. 2018, 25, 255–258. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; Caturegli, L.; Volterrani, M.; et al. Autonomous Mower vs. Rotary Mower: Effects on turf quality and weed control in tall fescue lawn. Agronomy 2018, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Grossi, N.; Fontanelli, M.; Garramone, E.; Peruzzi, A.; Raffaelli, M.; Pirchio, M.; Martelloni, L.; Frasconi, C.; Caturegli, L.; Gaetani, M.; et al. Autonomous mower saves energy and improves quality of tall fescue lawn. Horttechnology 2016, 26, 825–830. [Google Scholar] [CrossRef] [Green Version]
- Magni, S.; Gaetani, M.; Caturegli, L.; Leto, C.; Tuttolomondo, T.; La Bella, S.; Virga, G.; Ntoulas, N.; Volterrani, M. Phenotypic traits and establishment speed of 44 turf bermudagrass accessions. Acta Agric. Scand. Sect. B Soil Plant Sci. 2014, 64, 722–733. [Google Scholar] [CrossRef]
- Ho, V.; Rauf, K.; Passchier, I.; Rijks, F.; Witsenboer, T. Accuracy assessment of RTK GNSS based positioning systems for automated driving. In Proceedings of the 15th Workshop on Positioning, Navigation and Communications, WPNC 2018, Bremen, Germany, 25–26 October 2018. [Google Scholar]
- El-Mowafy, A.; Kubo, N. Integrity monitoring of vehicle positioning in urban environment using RTK-GNSS, IMU and speedometer. Meas. Sci. Technol. 2017, 28, 55102. [Google Scholar] [CrossRef]
- Moore, T.; Stouch, D.A. Generalized Extended Kalman Filter Implementation for the Robot Operating System. In Intelligent Autonomous Systems 13; Springer: Cham, Switzerland, 2016; pp. 335–348. [Google Scholar]
- Xiang, Y.; Li, D.; Su, T.; Zhou, Q.; Brach, C.; Mao, S.S.; Geimer, M. Where Am I? SLAM for Mobile Machines on a Smart Working Site. Vehicles 2022, 4, 31. [Google Scholar] [CrossRef]
- Sun, Q.C.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Pursuing Precise Vehicle Movement Trajectory in Urban Residential Area Using Multi-GNSS RTK Tracking. Transp. Res. Procedia 2017, 25, 2356–2372. [Google Scholar] [CrossRef]
- Sportelli, M.; Fontanelli, M.; Pirchio, M.; Frasconi, C.; Raffaelli, M.; Caturegli, L.; Magni, S.; Volterrani, M.; Peruzzi, A. Robotic Mowing of Tall Fescue at 90 mm Cutting Height: Random Trajectories vs. Systematic Trajectories. Agronomy 2021, 11, 2567. [Google Scholar] [CrossRef]
- Sportelli, M.; Martelloni, L.; Orlandi, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Consorti, S.B.; Vernieri, P. Autonomous mower management systems efficiency improvement: Analysis of greenspace features and planning suggestions. Agriculture 2019, 9, 115. [Google Scholar] [CrossRef] [Green Version]
- Martelloni, L.; Fontanelli, M.; Pieri, S.; Frasconi, C.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; Pirchio, M.; Raffaelli, M.; et al. Assessment of the cutting performance of a robot mower using custom built software. Agronomy 2019, 9, 230. [Google Scholar] [CrossRef] [Green Version]
- Sportelli, M.; Pirchio, M.; Fontanelli, M.; Volterrani, M.; Frasconi, C.; Martelloni, L.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; et al. Autonomous mowers working in narrow spaces: A possible future application in agriculture? Agronomy 2020, 10, 553. [Google Scholar] [CrossRef] [Green Version]
- Xing, Q.; Qin, J.; Hu, Y.H. Effects of different trampling intensities on three species of warm season turfgrass. Acta Prataculturae Sin. 2022, 31, 52–61. [Google Scholar]
- Design Workshop. Landscape Architecture Documentation Standards: Principles, Guidelines, and Best Practices; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M.; Magni, S.; Caturegli, L.; Volterrani, M.; Mainardi, M.; Peruzzi, A. Autonomous mowing and complete floor cover for weed control in Vineyards. Agronomy 2021, 11, 538. [Google Scholar] [CrossRef]
- Fox John, W.S. An R Companion to Applied Regression; Sage: Thousand Oaks, CA, USA, 2019; Available online: https://socialsciences.mcmaster.ca/jfox/Books/Companion/ (accessed on 26 May 2022).
- De Mendiburu, F. Agricolae: Statistical Procedures for Agricultural Research. R package version 1.3-5. 2021. Available online: https://CRAN.R-project.org/package=agricolae (accessed on 26 May 2022).
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Gagliardi, L.; Raffaelli, M.; Peruzzi, A.; Antichi, D. Innovative Living Mulch Management Strategies for Organic Conservation Field Vegetables: Evaluation of Continuous Mowing, Flaming, and Tillage Performances. Agronomy 2022, 12, 622. [Google Scholar] [CrossRef]
- Norton, B.A.; Bending, G.D.; Clark, R.; Corstanje, R.; Dunnet, N.; Evans, K.L.; Grafius, D.R.; Gravestock, E.; Grice, S.M.; Harris, J.M.; et al. Urban meadows as an alternative to short mown grassland: Effects of composition and height on biodiversity. Ecol. Appl. 2019, 29, e01946. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, J.; Cheng, S.; Xie, Y. Double heuristic optimization based on hierarchical partitioning for coverage path planning of robot mowers. In Proceedings of the 12th International Conference on Computational Intelligence and Security (CIS), Wuxi, China, 16–19 December 2016. [Google Scholar]
- Bosse, M.; Nourani-Vatani, N.; Roberts, J. Coverage Algorithms for an Under-actuated Car-Like Vehicle in an Uncertain Environment. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007. [Google Scholar]
- Hoyle, H.; Jorgensen, A.; Warren, P.; Dunnett, N.; Evans, K. Not in their front yard. The opportunities and challenges of introducing perennial urban meadows: A local authority stakeholder perspective. Urban For. Urban Green. 2017, 25, 139–149. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
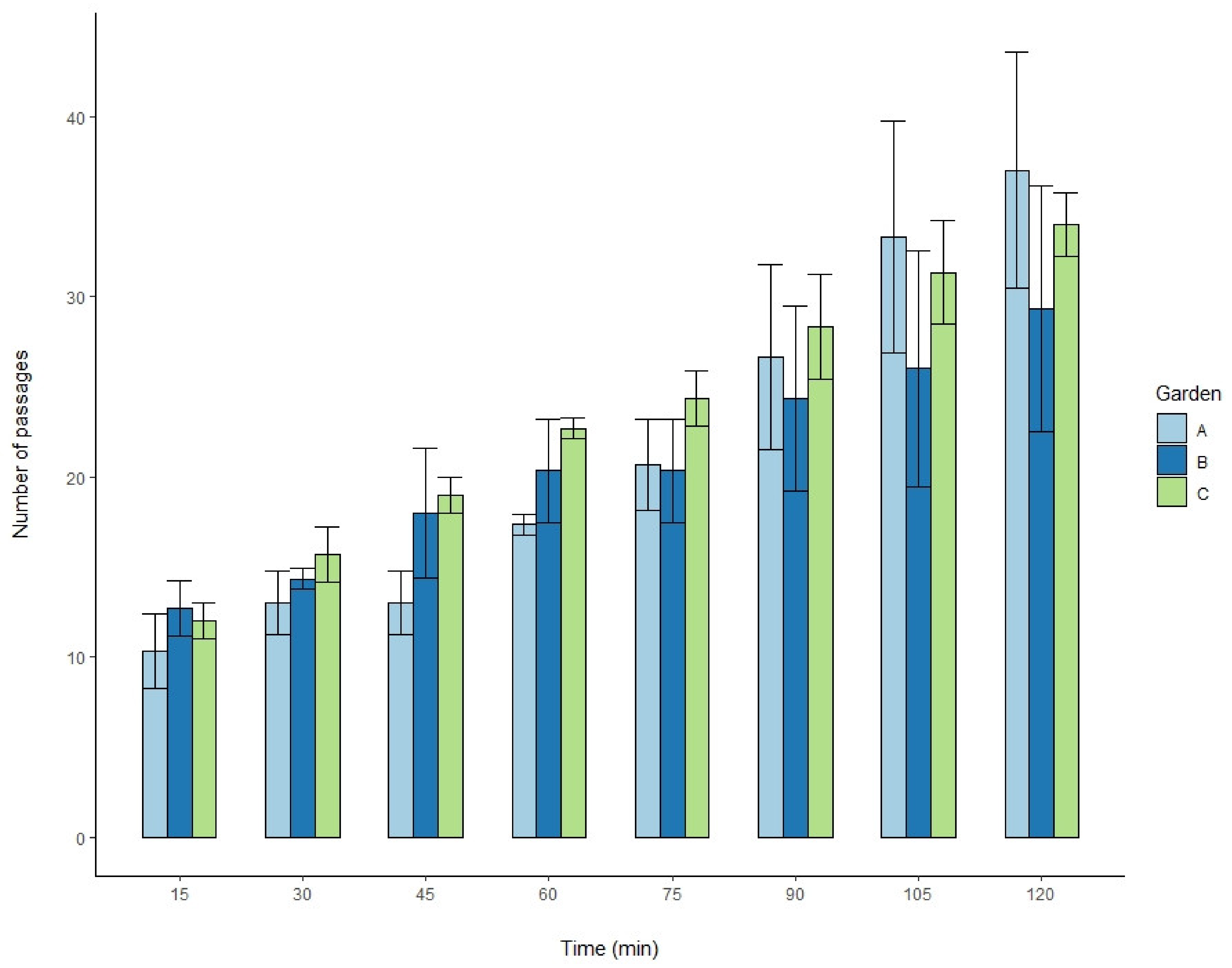
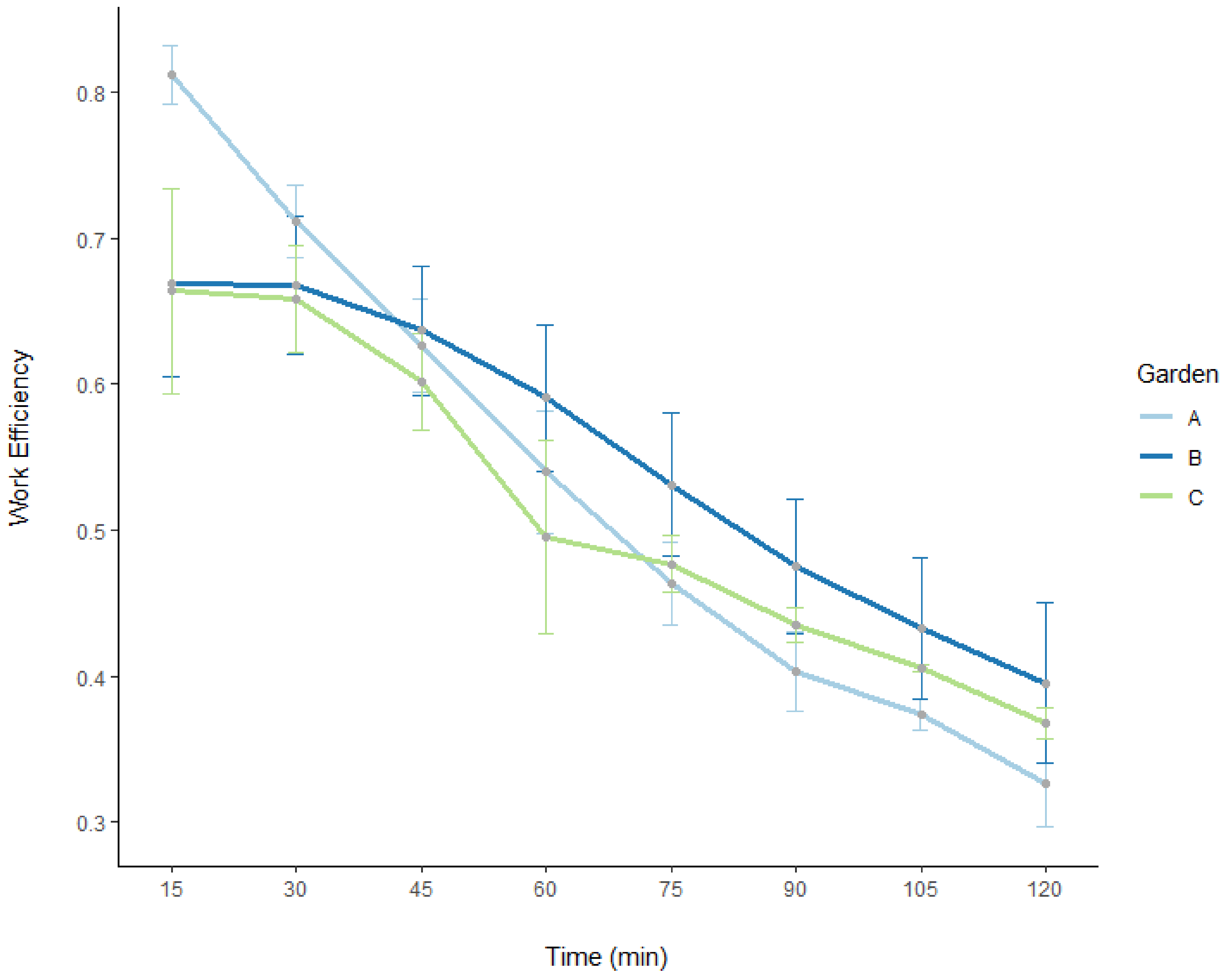
| Source | Area Mowed (%) | Number of Intersections | Distance Travelled (m) | Number of Passages | Work Efficiency |
|---|---|---|---|---|---|
| Garden | *** | *** | *** | *** | *** |
| Time | *** | *** | *** | ** | NS |
| Garden × Time | NS | *** | ** | *** | *** |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sportelli, M.; Luglio, S.M.; Caturegli, L.; Pirchio, M.; Magni, S.; Volterrani, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Gagliardi, L.; et al. Trampling Analysis of Autonomous Mowers: Implications on Garden Designs. AgriEngineering 2022, 4, 592-605. https://doi.org/10.3390/agriengineering4030039
Sportelli M, Luglio SM, Caturegli L, Pirchio M, Magni S, Volterrani M, Frasconi C, Raffaelli M, Peruzzi A, Gagliardi L, et al. Trampling Analysis of Autonomous Mowers: Implications on Garden Designs. AgriEngineering. 2022; 4(3):592-605. https://doi.org/10.3390/agriengineering4030039
Chicago/Turabian StyleSportelli, Mino, Sofia Matilde Luglio, Lisa Caturegli, Michel Pirchio, Simone Magni, Marco Volterrani, Christian Frasconi, Michele Raffaelli, Andrea Peruzzi, Lorenzo Gagliardi, and et al. 2022. "Trampling Analysis of Autonomous Mowers: Implications on Garden Designs" AgriEngineering 4, no. 3: 592-605. https://doi.org/10.3390/agriengineering4030039
APA StyleSportelli, M., Luglio, S. M., Caturegli, L., Pirchio, M., Magni, S., Volterrani, M., Frasconi, C., Raffaelli, M., Peruzzi, A., Gagliardi, L., Fontanelli, M., & Sciusco, G. (2022). Trampling Analysis of Autonomous Mowers: Implications on Garden Designs. AgriEngineering, 4(3), 592-605. https://doi.org/10.3390/agriengineering4030039