



The Next Generation of Cotton Defoliation Sprayer



 , ,
, , 
Abstract
:1. Introduction
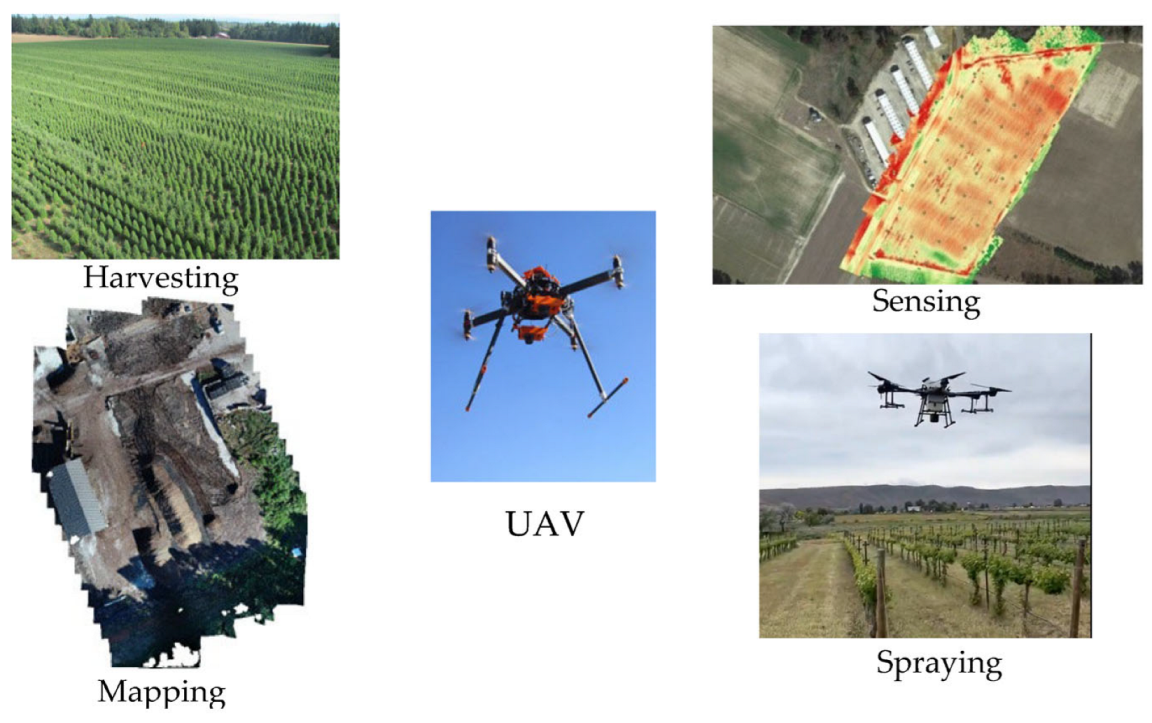
1.1. Spraying Technologies
1.2. Cotton
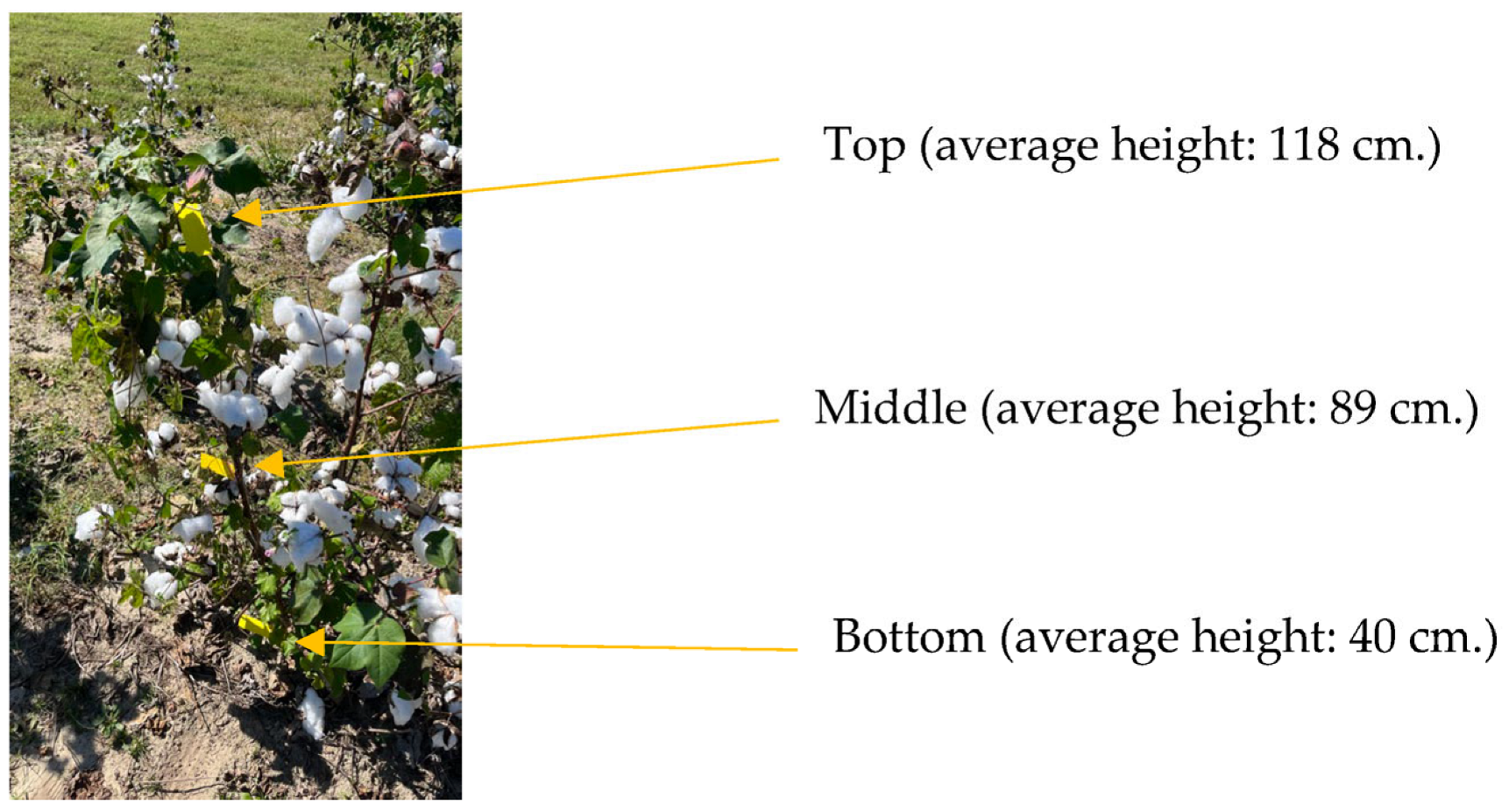
1.3. Physiology and Growth Pattern
1.4. Cotton Defoliation
1.5. Pulse Width Modulation (PWM) Technology for Spraying
1.6. Defoliation Time
1.7. Defoliant and Factors Affecting Defoliation
2. Materials and Methods
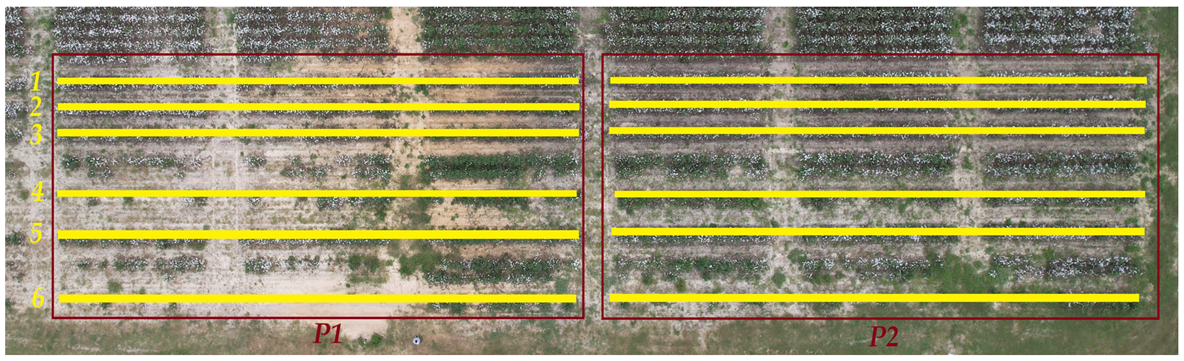
2.1. Study Site
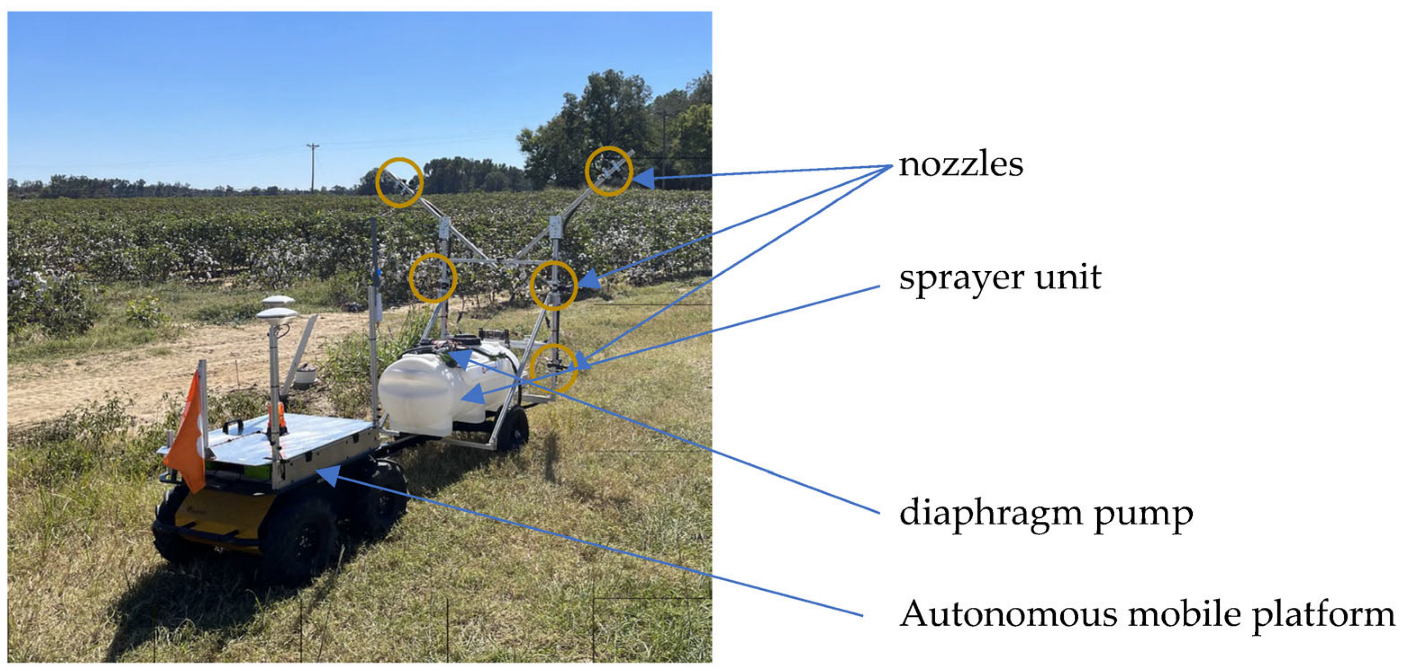
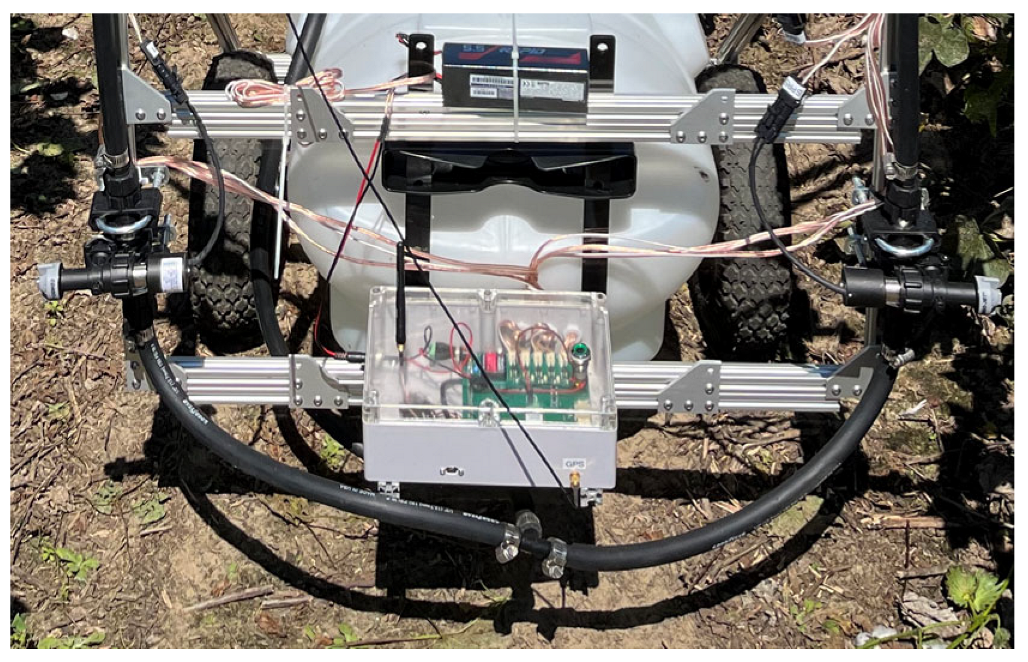
2.2. Autonomous Mobile Platform and Sprayer Unit
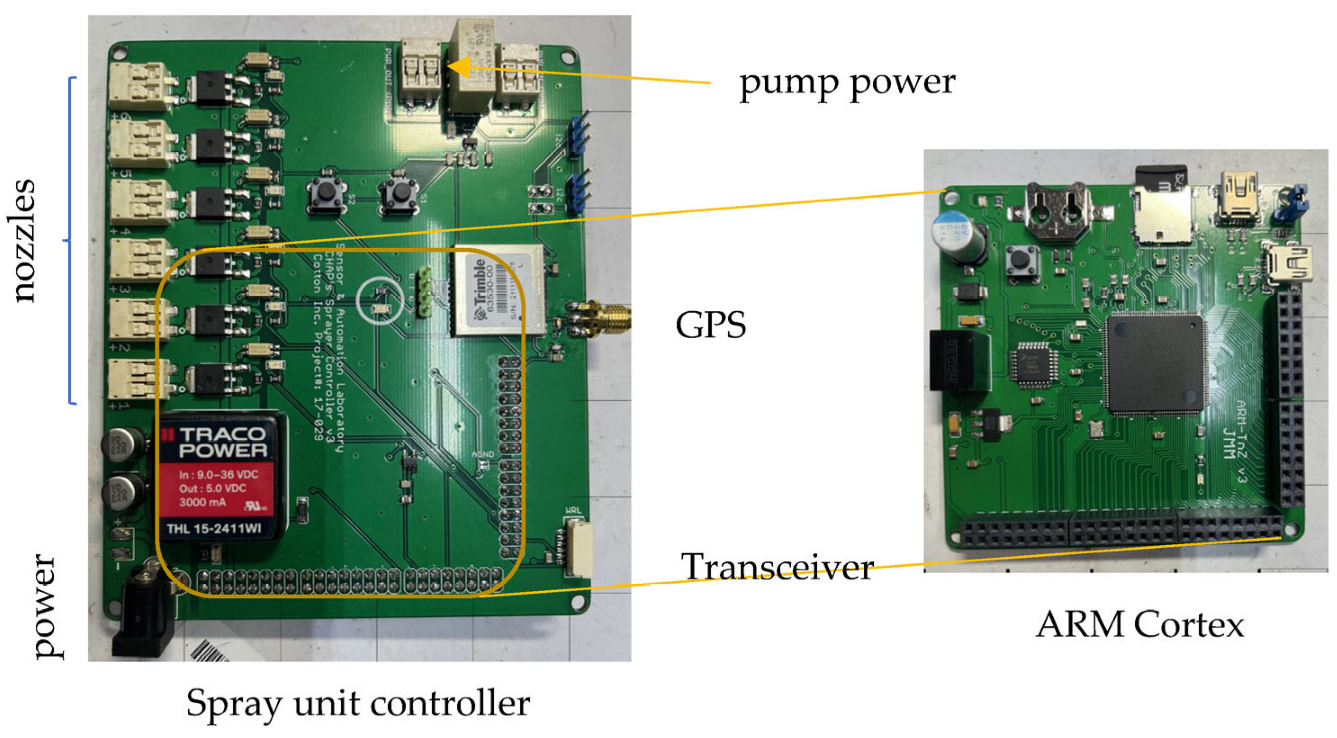
2.3. Sprayer Controller
2.4. Cotton Cultivars and Defoliant Chemicals
2.5. Data Collection and Analysis
3. Results and Discussion
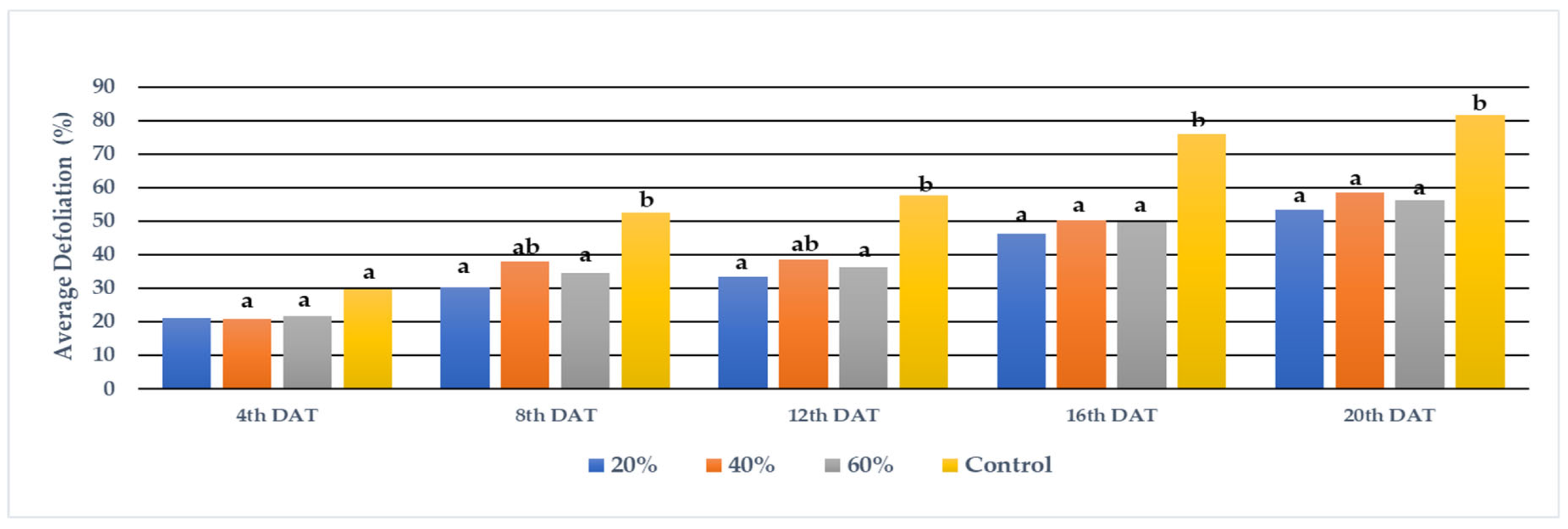
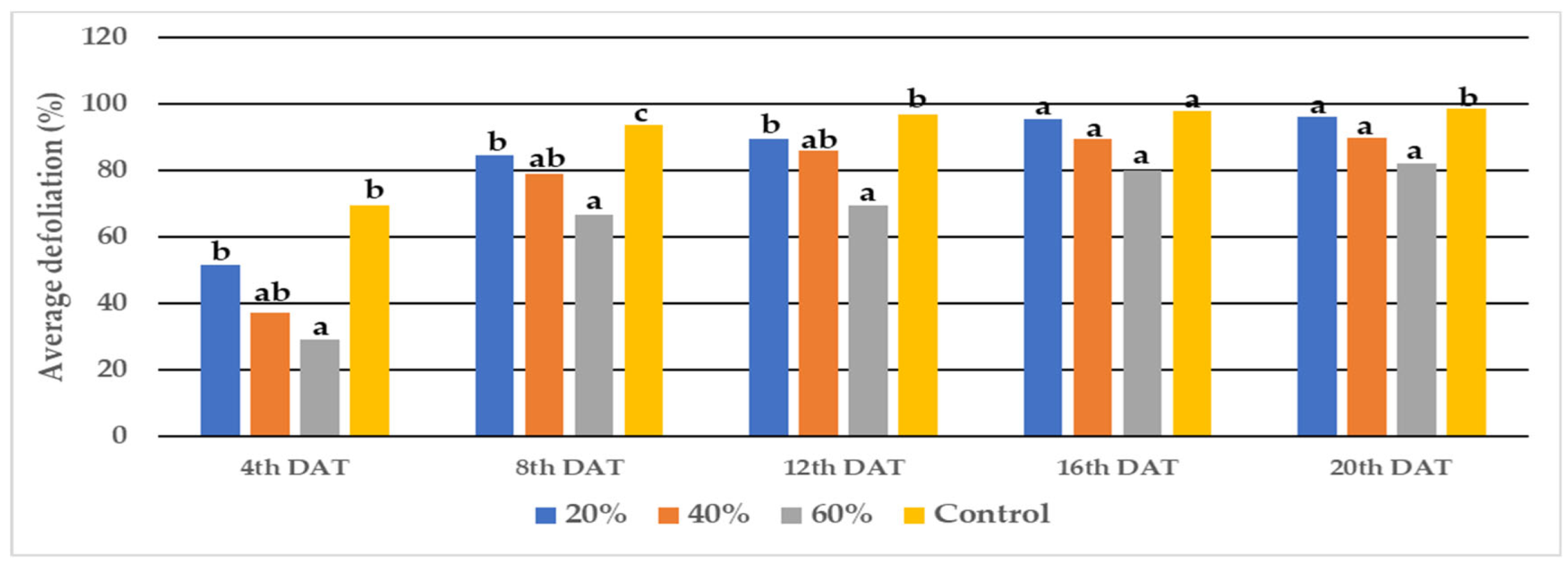
3.1. Defoliation Rate
3.2. Droplet Characteristics
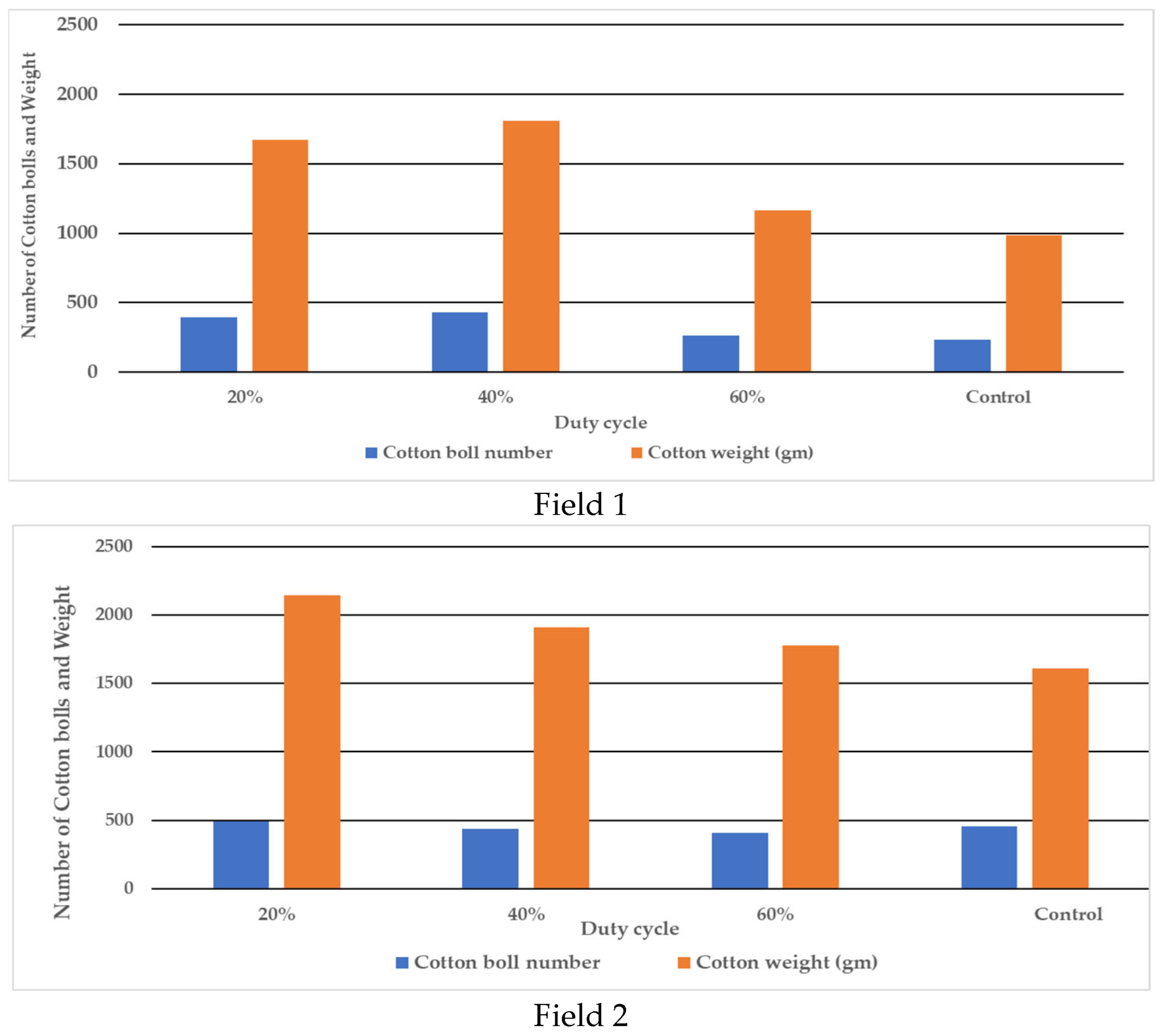
3.3. Cotton Yield
4. Discussions
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmad, F.; Sultanm, M. Technology in Agriculture; IntechOpen: London, UK, 2021. [Google Scholar]
- Yadav, I.C.; Devi, N.L. Pesticides classification and its impact on human and environment. Environ. Sci. Eng. 2017, 6, 140–158. [Google Scholar]
- Jin, D.; Wang, X.; Xu, Y.; Gui, H.; Zhang, H.; Dong, Q.; Sikder, R.K.; Yang, G.; Song, M. Chemical defoliant promotes leaf abscission by altering ros metabolism and photosynthetic efficiency in Gossypium hirsutum. Int. J. Mol. Sci. 2020, 21, 2738. [Google Scholar] [CrossRef] [PubMed]
- Grisso, R.D.; Dickey, E.C.; Schulze, L.D. The Cost of Misapplication of Herbicides. Appl. Eng. Agric. 1989, 5, 344–347. [Google Scholar] [CrossRef]
- Hawkins, N.J.; Bass, C.; Dixon, A.; Neve, P. The evolutionary origins of pesticide resistance: The evolutionary origins of pesticide resistance. Biol. Rev. 2019, 94, 135–155. [Google Scholar] [CrossRef]
- Wilson, C. Environmental and human costs of commercial agricultural production in South Asia. Int. J. Soc. Econ. 2000, 27, 816–846. [Google Scholar] [CrossRef]
- Bjørling-Poulsen, M.; Andersen, H.R.; Grandjean, P. Potential developmental neurotoxicity of pesticides used in Europe. Environ. Health 2008, 7, 50. [Google Scholar] [CrossRef]
- FAO. Pesticides Use, Pesticides Trade and Pesticides Indicators—Global, Regional and Country Trends, 1990–2020; FAOSTAT Analytical Briefs 2022, no. 46; FAO: Rome, Italy, 2022. [Google Scholar] [CrossRef]
- Ade, G.; Molari, G.; Rondelli, V. Recycling tunnel sprayer for pesticide dose adjustment to the crop environment. Trans. ASABE 2007, 50, 409–413. [Google Scholar] [CrossRef]
- Jamar, L.; Mostade, O.; Huyghebaert, B.; Pigeon, O.; Lateur, M. Comparative performance of recycling tunnel and conventional sprayers using standard and drift-mitigating nozzles in dwarf apple orchards. Crop Prot. 2010, 29, 561–566. [Google Scholar] [CrossRef]
- Cunningham, G.P.; Harden, J. Air-tower sprayers increase spray application efficiency in mature citrus trees. Aust. J. Exp. Agric. 1998, 38, 871–877. [Google Scholar] [CrossRef]
- Panneton, B.; Lacasse, B.; Thériault, R. Penetration of spray in apple trees as a function of airspeed, airflow, and power for tower sprayers. Can. Biosyst. Eng. 2005, 47, 2–13. [Google Scholar]
- Hanson, E.; Hancock, J.; Ramsdell, D.C.; Schilder, A.; VanEe, G.; Ledebuhr, R. Sprayer type and pruning affect the incidence of blueberry fruit rots. HortScience 2000, 35, 235–238. [Google Scholar] [CrossRef]
- Gimenes, M.; Raetano, C.; Dal Pogetto, M.; Prado, E.; de Souza Christovam, R.; Rezende, D.; de Almeida Costa, S. Air-assistance in spray booms which have different spray volumes and nozzle types for chemically controlling Spodoptera frugiperda on corn. J. Plant Prot. Res. 2012, 52, 247–253. [Google Scholar] [CrossRef]
- Cauquil, J. Cotton-pest control: A review of the introduction of ultra-low-volume (ULV) spraying in sub-Saharan French-speaking Africa. Crop Prot. 1987, 6, 38–42. [Google Scholar] [CrossRef]
- Edward Law, S. Agricultural electrostatic spray application: A review of significant research and development during the 20th century. J. Electrost. 2001, 51–52, 25–42. [Google Scholar] [CrossRef]
- Tewari, V.K.; Pareek, C.M.; Lal, G.; Dhruw, L.K.; Singh, N. Image processing based real-time variable-rate chemical spraying system for disease control in paddy crop. Artif. Intell. Agric. 2020, 4, 21–30. [Google Scholar] [CrossRef]
- Terra, F.P.; Nascimento, G.H.; Duarte, G.A.; Drews-Jr, P.L.J. Autonomous agricultural sprayer using machine vision and nozzle control. J. Intell. Robot. Syst. 2021, 102, 38. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Costa, F.G.; Pessin, G.; Ueyama, J.; Freitas, H.; Colombo, A.; Fini, P.H.; Villas, L.; Osório, F.S.; Vargas, P.A.; et al. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Archit. 2014, 60, 393–404. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.F.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A small versatile electrical robot for autonomous spraying in agriculture. AgriEngineering 2019, 1, 391–402. [Google Scholar] [CrossRef]
- Esau, T.; Zaman, Q.; Groulx, D.; Farooque, A.; Schumann, A.; Chang, Y. Machine vision smart sprayer for spot-application of agrochemical in wild blueberry fields. Precis. Agric. 2018, 19, 770–788. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 2010, 29, 239–248. [Google Scholar] [CrossRef]
- Asaei, H.; Jafari, A.; Loghavi, M. Site-specific orchard sprayer equipped with machine vision for chemical usage management. Comput. Electron. Agric. 2019, 162, 431–439. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Chen, P.; Xu, W.; Zhan, Y.; Wang, G.; Yang, W.; Lan, Y. Determining application volume of unmanned aerial spraying systems for cotton defoliation using remote sensing images. Comput. Electron. Agric. 2022, 196, 106912. [Google Scholar] [CrossRef]
- Barnes, E.; Morgan, G.; Hake, K.; Devine, J.; Kurtz, R.; Ibendahl, G.; Sharda, A.; Rains, G.; Snider, J.; Maja, J.M.; et al. Opportunities for Robotic Systems and Automation in Cotton Production. AgriEngineering 2021, 3, 339–362. [Google Scholar] [CrossRef]
- Maiti, R.; Kumari, C.A.; Huda, A.K.S.; Mandal, D.; Begum, S. Advances in Cotton Science: Botany, Production, and Crop Improvement; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Stewart, J.M.; Oosterhuis, D.; Heitholt, J.J.; Mauney, J.R. Physiology of Cotton; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Rönnbäck, K.; Theodoridis, D. Cotton cultivation under colonial rule in India in the nineteenth century from a comparative perspective. Econ. Hist. Rev. 2022, 75, 374–395. [Google Scholar] [CrossRef]
- Shaheen, T.; Tabbasam, N.; Iqbal, M.A.; Ashraf, M.; Zafar, Y.; Paterson, A.H. Cotton genetic resources. A review. Agron. Sustain. Dev. 2012, 32, 419–432. [Google Scholar]
- Wegier, A.; Alavez, V.; Piñero, D. Cotton: Traditional and modern uses. In Ethnobotany of Mexico: Interactions of People and Plants in Mesoamerica; Lira, R., Casas, A., Blancas, J., Eds.; Springer: New York, NY, USA, 2016; pp. 439–456. [Google Scholar] [CrossRef]
- Singh, B.P. Overview of industrial crops. In Industrial Crops and Uses; CAB International: Wallingford, UK, 2010. [Google Scholar] [CrossRef]
- Jones, M.; Farmaha, B.; Greene, J.; Marshall, M.; Mueller, J. South Carolina Cotton Growers Guide; Clemson University: Clemson, SC, USA, 2019. [Google Scholar]
- Chu, T.; Chen, R.; Landivar, J.A.; Maeda, M.M.; Yang, C.; Starek, M.J. Cotton growth modeling and assessment using unmanned aircraft system visual-band imagery. J. Appl. Remote Sens. 2016, 10, 036018. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Paterson, A.H.; Jiang, Y.; Xu, R.; Robertson, J.S.; Snider, J.L.; Chee, P.W. In-field high throughput phenotyping and cotton plant growth analysis using lidar. Front. Plant Sci. 2018, 9, 16. [Google Scholar] [CrossRef]
- Ritchie, G.; Bednarz, C.W.; Jost, P.H.; Brown, S.M. Cotton Growth and Development; University of Georgia: Athens, GA, USA, 2004. [Google Scholar]
- Wright, D.L.; Sprenkel, R.K.; Marois, J.J.; Plant, C. Cotton Growth and Development; University of Florida, Agronomy Department, Florida Cooperative Extension Services, IFAS Extension, Publication SSAGR-238: Gainsville, FL, USA, 2005. [Google Scholar]
- Xin, F.; Zhao, J.; Zhou, Y.; Wang, G.; Han, X.; Fu, W.; Deng, J.; Lan, Y. Effects of dosage and spraying volume on cotton defoliants efficacy: A case study based on application of unmanned aerial vehicles. Agronomy 2018, 8, 85. [Google Scholar] [CrossRef]
- Meng, L.; Zhang, L.; Qi, H.; Du, M.; Zuo, Y.; Zhang, M.; Tian, X.; Li, Z. Optimizing the application of a novel harvest aid to improve the quality of mechanically harvested cotton in the North China Plain. J. Integr. Agric. 2021, 20, 2892–2899. [Google Scholar] [CrossRef]
- Addicott, F.T.; Lynch, R.S. Defoliation and desiccation: Harvest-aid practices. Adv. Agron. 1957, 9, 67–93. [Google Scholar] [CrossRef]
- Karademir, E.; Karademir, C. Cotton Production under Abiotic Stress; Iksad Publications: Ankara, Turkey, 2021; Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwiLtPXO8OL8AhWHD1kFHTEwC-gQFnoECA8QAQ&url=https%3A%2F%2Fiksadyayinevi.com%2Fwp-content%2Fuploads%2F2021%2F12%2FCOTTON-PRODUCTION-UNDER-ABIOTIC-STRESS.pdf&usg=AOvVaw13l7ZwnBpKaBmE4an88BQ5 (accessed on 22 November 2022).
- Snipes, C.E.; Cathey, G.W. Evaluation of defoliant mixtures in cotton. Field Crops Res. 1992, 28, 327–334. [Google Scholar] [CrossRef]
- Meena, R.A.; Monga, D.; Ratna, S. Effect of defoliation on maturity behaviour and seed cotton yield in cotton. J. Cotton Res. Dev. 2016, 30, 63–65. [Google Scholar]
- Eaton, F.M. Physiology of the cotton plant. Annu. Rev. Plant. Physiol. 1955, 6, 299–328. [Google Scholar] [CrossRef]
- Abbas, I.; Liu, J.; Faheem, M.; Noor, R.S.; Shaikh, S.A.; Solangi, K.A.; Raza, S.M. Different real-time sensor technologies for the application of variable-rate spraying in agriculture. Sens. Actuators A Phys. 2020, 316, 112265. [Google Scholar] [CrossRef]
- Sumner, H.R.; Dowler, C.C.; Garvey, P.M. Application of agrichemicals by chemigation, pivot-attached sprayer systems, and conventional sprayers. Appl. Eng. Agric. 2000, 16, 103. [Google Scholar] [CrossRef]
- Dou, Z.; Fang, Z.; Han, X.; Liu, Y.; Duan, L.; Zeeshan, M.; Arshad, M. Comparison of the Effects of Chemical Topping Agent Sprayed by a UAV and a Boom Sprayer on Cotton Growth. Agronomy 2022, 12, 1625. [Google Scholar] [CrossRef]
- Salcedo, R.; Zhu, H.; Zhang, Z.; Wei, Z.; Chen, L.; Ozkan, E.; Falchieri, D. Foliar deposition and coverage on young apple trees with PWM-controlled spray systems. Comput. Electron. Agric. 2020, 178, 105794. [Google Scholar] [CrossRef]
- Mahmud, M.S.; Zahid, A.; He, L.; Choi, D.; Krawczyk, G.; Zhu, H.; Heinemann, P. Development of a LiDAR-guided section-based tree canopy density measurement system for precision spray applications. Comput. Electron. Agric. 2021, 182, 106053. [Google Scholar] [CrossRef]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Emmanuel, A.A.; Hasan, H.S. Robotics and automation in agriculture: Present and future applications. Appl. Model. Simul. 2020, 4, 130–140. Available online: http://arqiipubl.com/ojs/index.php/AMS_Journal/article/view/130 (accessed on 8 February 2022).
- Manor, G.; Hofner, A.; Or, R.; Phishler, G.; Epstein, Y.; Nakash, T.; Jacobi, M. Air Stream Facilitated Application of Cotton Foliage Treatments. Trans. ASAE 1989, 32, 0037–0038. [Google Scholar] [CrossRef]
- Cavalaris, C.; Karamoutis, C.; Markinos, A. Efficacy of cotton harvest aids applications with unmanned aerial vehicles (UAV) and ground-based field sprayers–A case study comparison. Smart Agric. Technol. 2022, 2, 100047. [Google Scholar] [CrossRef]
- Xiao, Q.; Xin, F.; Lou, Z.; Zhou, T.; Wang, G.; Han, X.; Fu, W. Effect of aviation spray adjuvants on defoliant droplet deposition and cotton defoliation efficacy sprayed by unmanned aerial vehicles. Agronomy 2019, 9, 217. [Google Scholar] [CrossRef]
- Chen, P.; Xu, W.; Zhan, Y.; Yang, W.; Wang, J.; Lan, Y. Evaluation of Cotton Defoliation Rate and Establishment of Spray Prescription Map Using Remote Sensing Imagery. Remote Sens. 2022, 14, 4206. [Google Scholar] [CrossRef]
- Leon, R.G.; Wright, D.L.; Brecke, B.J. 2020 Cotton Defoliation and Harvest Aid Guide, UF-IFAS Extension 2020. Available online: https://edis.ifas.ufl.edu/publication/AG188 (accessed on 2 February 2023).
- Singh, M.; Sharma, K.; Mishra, P.K.; Dixit, A.K.; Patel, B. Defoliation Effect on Cotton Crop by using Different Sprayers. Agric. Eng. Today 2017, 41, 31–34. [Google Scholar]
- Holtz, J. Pulse width modulation for electronic power conversion. Proc. IEEE 1994, 82, 1194–1214. [Google Scholar] [CrossRef]
- Zhu, H.; Lan, Y.; Wu, W.; Hoffmann, W.C.; Huang, Y.; Xue, X.; Fritz, B. Development of a PWM precision spraying controller for unmanned aerial vehicles. J. Bionic Eng. 2010, 7, 276–283. [Google Scholar] [CrossRef]
- Salcedo, R.; Zhu, H.; Ozkan, E.; Falchieri, D.; Zhang, Z.; Wei, Z. Reducing ground and airborne drift losses in young apple orchards with PWM-controlled spray systems. Comput. Electron. Agric. 2021, 189, 106389. [Google Scholar] [CrossRef]
- Butts, T.R.; Butts, L.E.; Luck, J.D.; Fritz, B.K.; Hoffmann, W.C.; Kruger, G.R. Droplet size and nozzle tip pressure from a pulse-width modulation sprayer. Biosyst. Eng. 2019, 178, 52–69. [Google Scholar] [CrossRef]
- Mangus, D.L.; Sharda, A.; Engelhardt, A.; Flippo, D.; Strasser, R.; Luck, J.D.; Griffin, T. Analyzing the nozzle spray fan pattern of an agricultural sprayer using pulse width modulation technology to generate an on-ground coverage map. Trans. ASABE 2017, 60, 315–325. [Google Scholar]
- Grella, M.; Gioelli, F.; Marucco, P.; Zwertvaegher, I.; Mozzanini, E.; Mylonas, N.; Nuyttens, D.; Balsari, P. Field assessment of a pulse width modulation (Pwm) spray system applying different spray volumes: Duty cycle and forward speed effects on vines spray coverage. Precis. Agric. 2022, 23, 219–252. [Google Scholar] [CrossRef]
- Womac, A.R.; Melnichenko, G.; Steckel, L.; Montgomery, G.; Hayes, R.M. Spray tip effect on glufosinate canopy deposits in Palmer amaranth (Amaranthus palmeri) for pulse-width modulation versus air-induction technologies. Trans. ASABE 2016, 59, 1597–1608. [Google Scholar]
- Boatwright, H.; Zhu, H.; Clark, A.; Schnabel, G. Evaluation of the intelligent sprayer system in peach production. Plant Dis. 2020, 104, 3207–3212. [Google Scholar] [CrossRef]
- Gormus, O.; El Sabagh, A.; Kurt, F. Impact of defoliation timings and leaf pubescence on yield and fiber quality of cotton. J. Agric. Sci. Technol. 2017, 19, 903–915. [Google Scholar]
- Snipes, C.E.; Baskin, C.C. Influence of early defoliation on cotton yield, seed quality, and fiber properties. Field Crops Res. 1994, 37, 137–143. [Google Scholar] [CrossRef]
- Faircloth, J.C.; Edmisten, K.L.; Wells, R.; Stewart, A.M. The influence of defoliation timing on yields and quality of two cotton cultivars. Crop Sci. 2004, 44, 165–172. [Google Scholar] [CrossRef]
- Bourland, F.M.; Tugwell, N.P.; Oosterhuis, D.M.; Cochran, M.J. Initial Development of COTMAN Program; COTMAN Crop Management System; Arkansas Agricultural Experiment Station: Fayetteville, AR, USA, 2008; pp. 15–19. [Google Scholar]
- Bynum, J.B.; Cothren, J.T. Indicators of last effective boll population and harvest aid timing in cotton. Agron. J. 2008, 100, 1106–1111. [Google Scholar] [CrossRef]
- Clay, P.A.; Young, K.M.; Taylor, E.R. Effect of Heat Unit Accumulation on Cotton Defoliation, Lint Yield and Fiber Quality; University of Arizona: Tucson, AZ, USA, 2006; Available online: https://repository.arizona.edu/handle/10150/198201 (accessed on 24 January 2023).
- Gwathmey, C.; Craig, C., Jr. Defoliants for cotton. In Encyclopedia of Pest Management; CRC Press: Boca Raton, FL, USA, 2007; pp. 135–137. [Google Scholar]
- Weicai, Q.; Xinyu, X.; Longfei, C.; Qingqing, Z.; Zhufeng, X.; Feilong, C. Optimization and test for spraying parameters of cotton defoliant sprayer. Int. J. Agric. Biol. Eng. 2016, 9, 63–72. [Google Scholar]
- Logan, J.; Gwathmey, C.O. Effects of weather on cotton responses to harvest-aid chemicals. J. Cotton Sci. 2002, 6, 1–12. [Google Scholar]
- Wang, H.; Gao, K.; Fang, S.; Zhou, Z. Cotton yield and defoliation efficiency in response to nitrogen and harvest aids. Agron. J. 2019, 111, 250–256. [Google Scholar] [CrossRef]
- Hake, S.J.; Kerby, T.A.; Hake, K.D. Cotton Production Manual; University of California, Agriculture and Natural Resources: Berkeley, CA, USA, 1996. [Google Scholar]
- Wills, G.D.; Snipes, C.E. Influence of Various Compounds and Temperature on Activity of Dropp Defoliant on Cotton; Office of Agricultural Communications (Publications Section), Division of Agriculture, Forestry, and Veterinary Medicine, Mississippi State University: Starkville, MS, USA, 1996. [Google Scholar]
- Nelson, J.M.; Bartels, P.G.; Hart, G. Effect of Plant Water Status on Defoliation and Yield of Upland Cotton for Short-Season Production. In Cotton: A College of Agriculture Report; College of Agriculture, University of Arizon: Tucson, AZ, USA, 1992. [Google Scholar]
- Liao, J.; Zang, Y.; Luo, X.; Zhou, Z.; Zang, Y.; Wang, P.; Hewitt, A.J. The relations of leaf area index with the spray quality and efficacy of cotton defoliant spraying using unmanned aerial systems. Comput. Electron. Agric. 2020, 169, 105228. [Google Scholar] [CrossRef]
- De Lima, I.D.S., Jr.; Degrande, P.E.; de Souza, C.; Viegas Neto, A.L. Droplet distribution as a function of cotton interrow spacing and angles of sprayer displacement. Eng. Agrícola 2018, 38, 927–933. [Google Scholar] [CrossRef]
- Chen, P.; Ouyang, F.; Wang, G.; Qi, H.; Xu, W.; Yang, W.; Zhang, Y.; Lan, Y. Droplet distributions in cotton harvest aid applications vary with the interactions among the unmanned aerial vehicle spraying parameters. Ind. Crops Prod. 2021, 163, 113324. [Google Scholar] [CrossRef]
- Zhu, H.; Dorner, J.W.; Rowland, D.L.; Derksen, R.C.; Ozkan, H.E. Spray penetration into peanut canopies with hydraulic nozzle tips. Biosyst. Eng. 2004, 87, 275–283. [Google Scholar] [CrossRef]
- Meng, Y.; Song, J.; Lan, Y.; Mei, G.; Liang, Z.; Han, Y. Harvest aids efficacy applied by unmanned aerial vehicles on cotton crop. Ind. Crops Prod. 2019, 140, 111645. [Google Scholar] [CrossRef]
- Maja, J.M.; Polak, M.; Burce, M.E.; Barnes, E. CHAP: Cotton-Harvesting Autonomous Platform. AgriEngineering 2021, 3, 199–217. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duty Cycle (%) | Volume/Sec (mL/s) |
|---|---|
| 20 | 13.0 |
| 40 | 22.8 |
| 60 | 31.9 |
| 80 | 42.7 |
| 100 | 49.5 |
| Product Formulation | Active Ingredient | Rate | Remarks |
|---|---|---|---|
| Folex 6 EC | Tribufos | 454 g/38 L | Cotton defoliant |
| Free fall SC | Thidiazuron | 91 g/38 L | Cotton defoliant |
| Super boll | Ethephon | 907 g/38 L | Plant regulator |
| Source | Degree of Freedom | Sum of Squares | Mean of Squares | F-Value | p-Value |
|---|---|---|---|---|---|
| Treatment (duty cycle) | 2 | 121.3 | 60.66 | 2.58 | 0.08269 |
| Block (Canopy height) | 2 | 328.8 | 164.39 | 6.99 | 0.00167 ** |
| Interaction | 4 | 277.4 | 69.36 | 2.95 | 0.02567 * |
| Residuals | 72 | 1692.1 | 23.5 |
| Source | Degree of Freedom | Sum of Squares | Mean of Squares | F-Value | p-Value |
|---|---|---|---|---|---|
| Treatment (duty cycle) | 2 | 60,365 | 30,183 | 2.557 | 0.08457 |
| Block (Canopy height) | 2 | 146,508 | 73,254 | 6.206 | 0.0032 ** |
| Interaction | 4 | 46,643 | 11,661 | 0.988 | 0.41978 |
| Residuals | 72 | 849933 | 11,805 |
| Source | Degree of Freedom | Sum of Squares | Mean of Squares | F-Value | p-Value |
|---|---|---|---|---|---|
| Treatment (duty cycle) | 2 | 0.00464 | 0.02318 | 1.634 | 0.2022 |
| Block (Canopy height) | 2 | 0.1918 | 0.09589 | 6.762 | 0.00204 ** |
| Interaction | 4 | 0.1102 | 0.02754 | 1.942 | 0.11262 |
| Residuals | 72 | 1.0209 | 0.01418 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neupane, J.; Maja, J.M.; Miller, G.; Marshall, M.; Cutulle, M.; Greene, J.; Luo, J.; Barnes, E. The Next Generation of Cotton Defoliation Sprayer. AgriEngineering 2023, 5, 441-459. https://doi.org/10.3390/agriengineering5010029
Neupane J, Maja JM, Miller G, Marshall M, Cutulle M, Greene J, Luo J, Barnes E. The Next Generation of Cotton Defoliation Sprayer. AgriEngineering. 2023; 5(1):441-459. https://doi.org/10.3390/agriengineering5010029
Chicago/Turabian StyleNeupane, Jyoti, Joe Mari Maja, Gilbert Miller, Michael Marshall, Matthew Cutulle, Jeremy Greene, Jun Luo, and Edward Barnes. 2023. "The Next Generation of Cotton Defoliation Sprayer" AgriEngineering 5, no. 1: 441-459. https://doi.org/10.3390/agriengineering5010029
APA StyleNeupane, J., Maja, J. M., Miller, G., Marshall, M., Cutulle, M., Greene, J., Luo, J., & Barnes, E. (2023). The Next Generation of Cotton Defoliation Sprayer. AgriEngineering, 5(1), 441-459. https://doi.org/10.3390/agriengineering5010029