




A Novel YOLOv6 Object Detector for Monitoring Piling Behavior of Cage-Free Laying Hens





Abstract
:1. Introduction
2. Materials and Methods
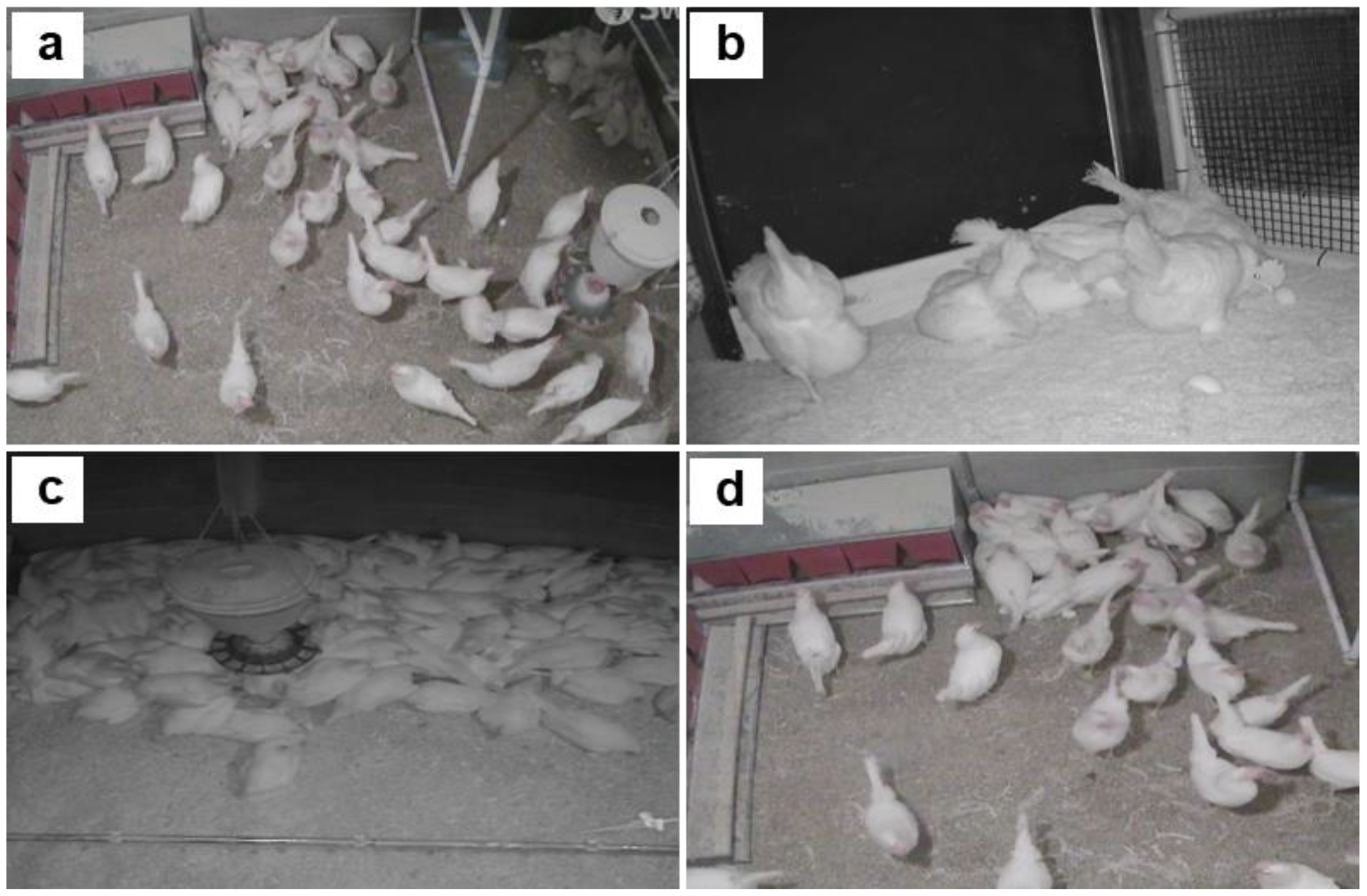
2.1. Experimental Housing and Management
2.2. Image and Data Collections
2.3. Image Processing
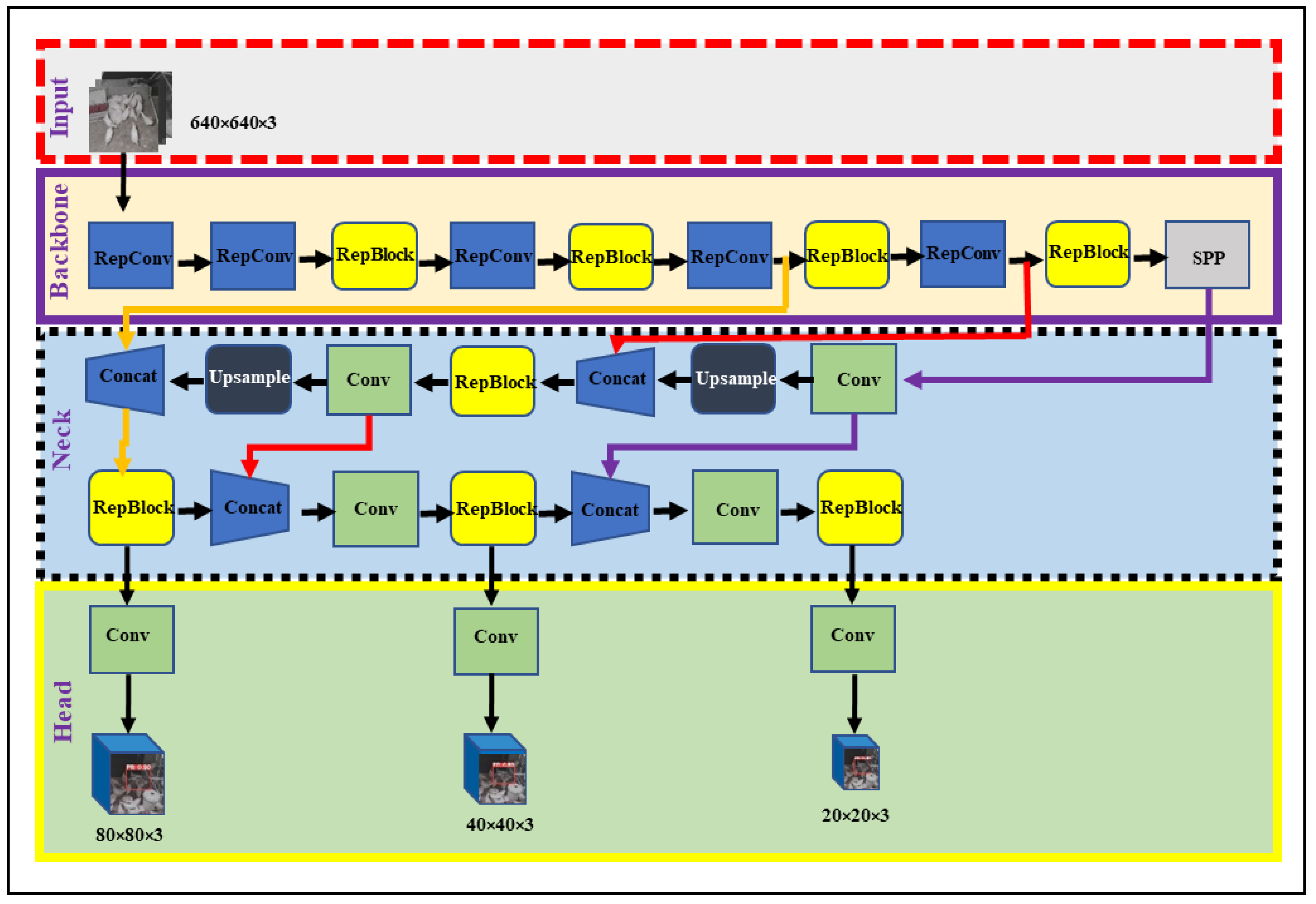
2.4. YOLOv6 Network Description
2.4.1. Model Input
2.4.2. Model Backbone
2.4.3. Model Neck
2.4.4. Anchor Boxes
2.4.5. Detection Head
2.4.6. Loss Function
2.4.7. Post-Processing
2.5. Computational Parameters
2.6. Performance Metrics
2.6.1. Precision
2.6.2. Recall
2.6.3. Mean Average Precision
2.6.4. Intersection over Union
3. Results
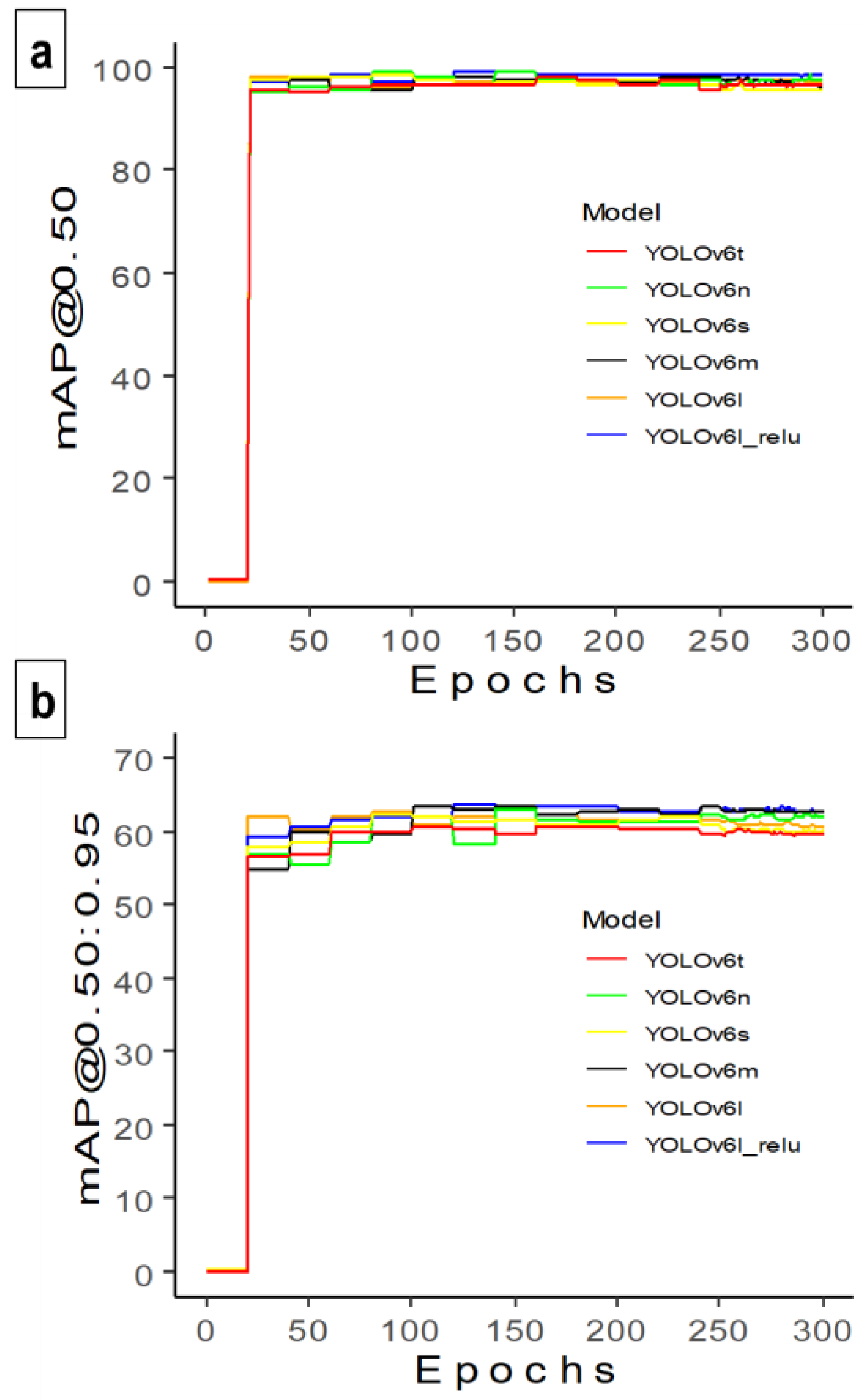
3.1. Performance Comparison of YOLOv6-PB Models
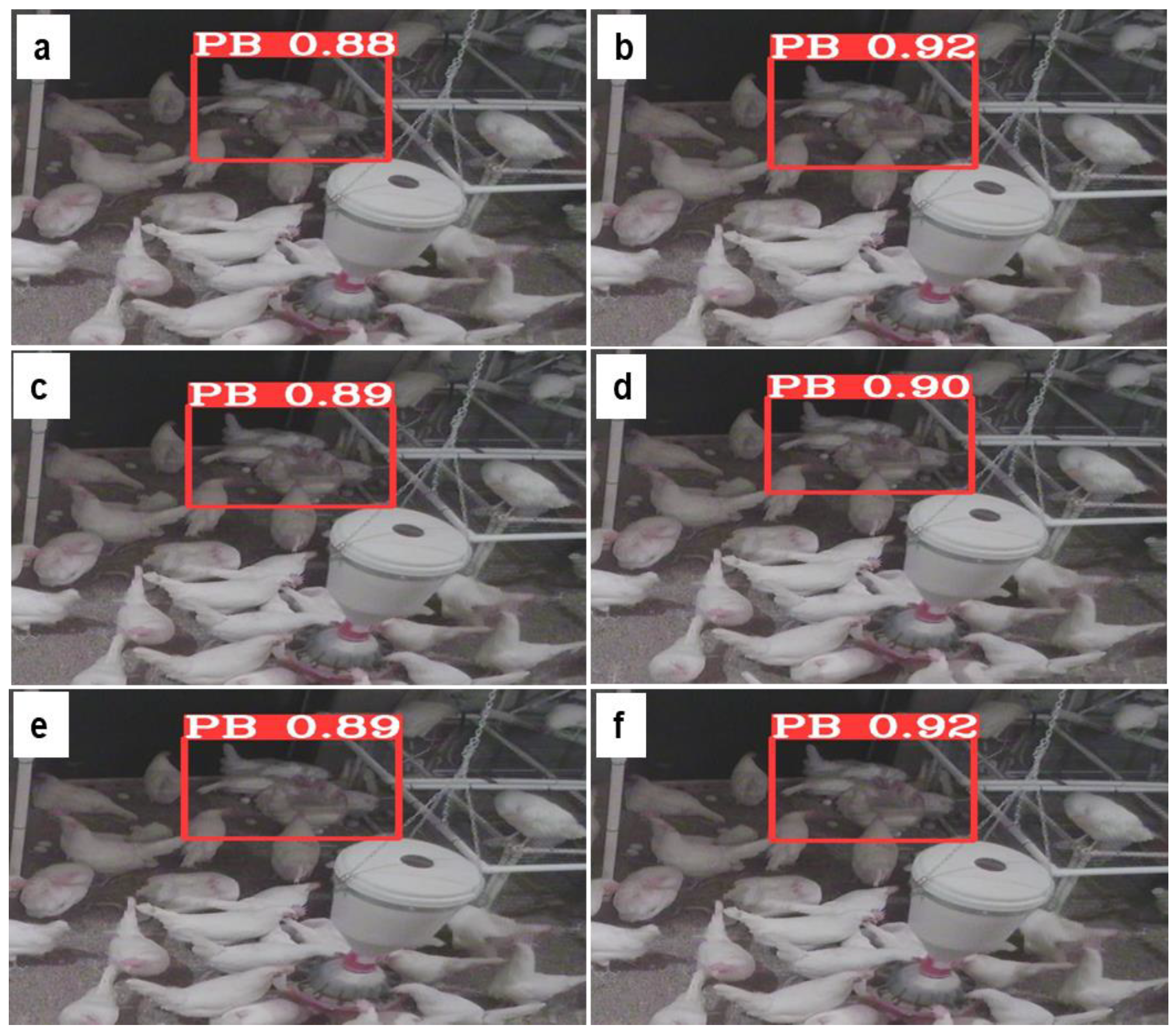
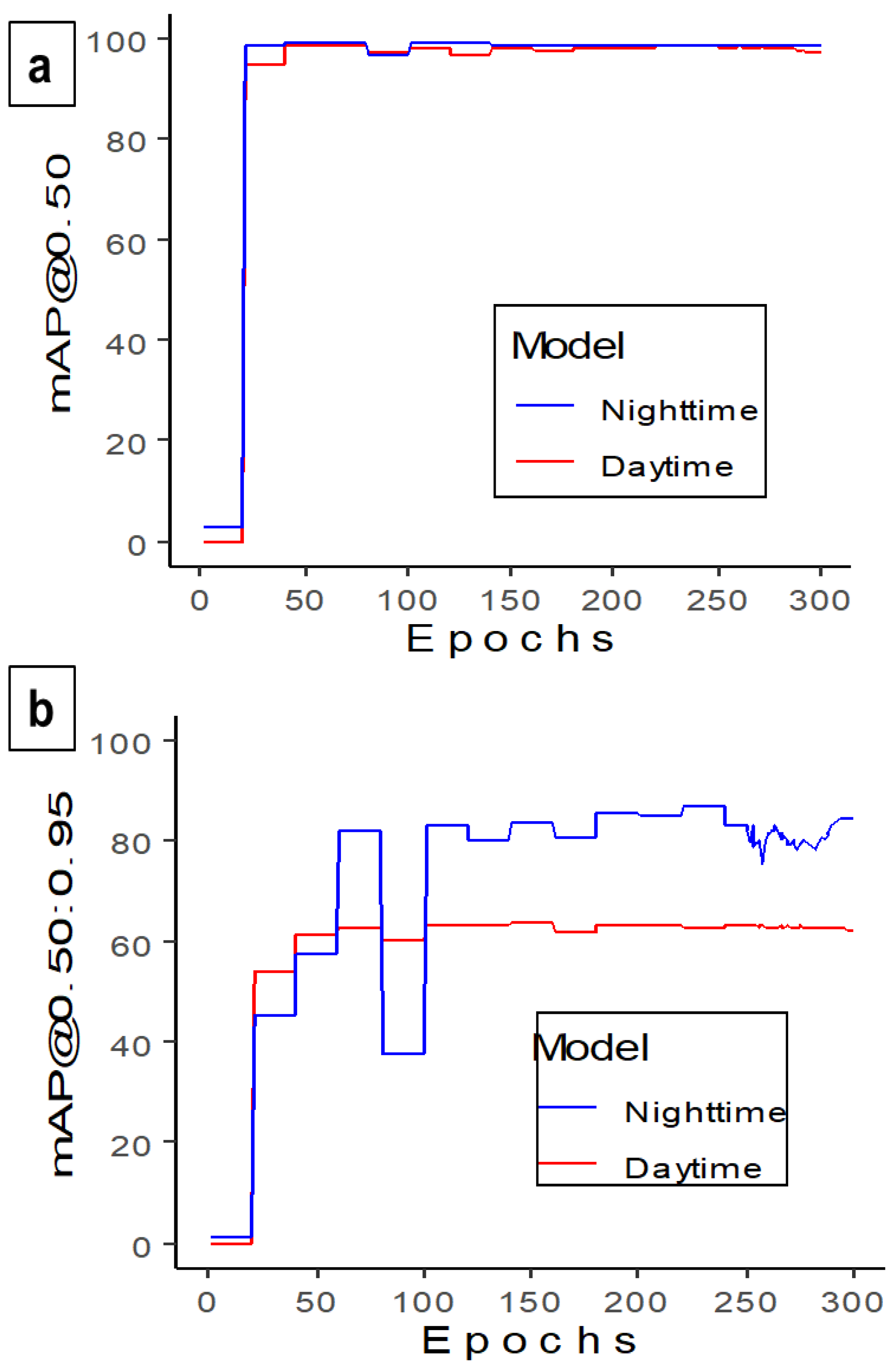
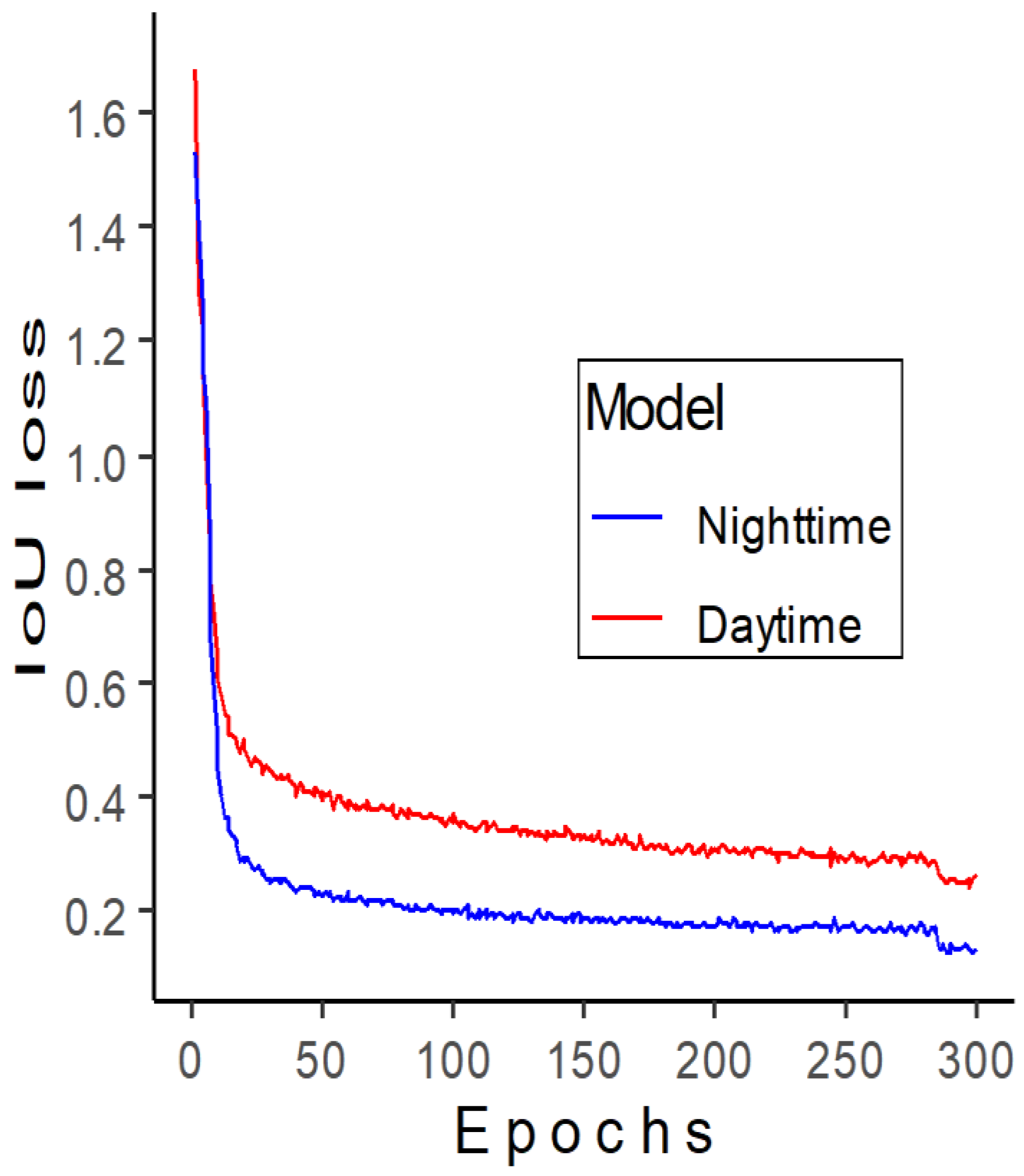
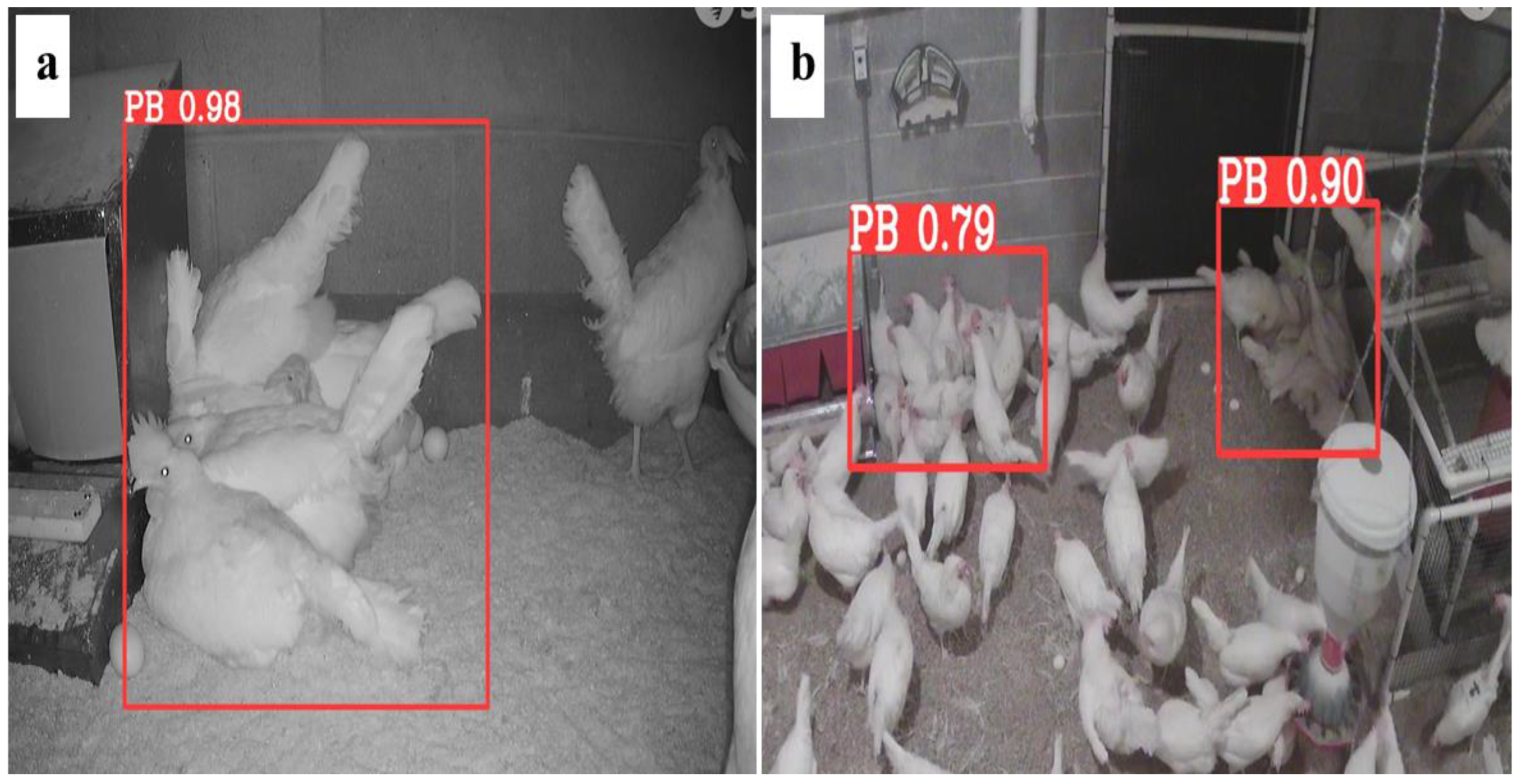
3.2. Performance of Piling Behavior under Different Photoperiods
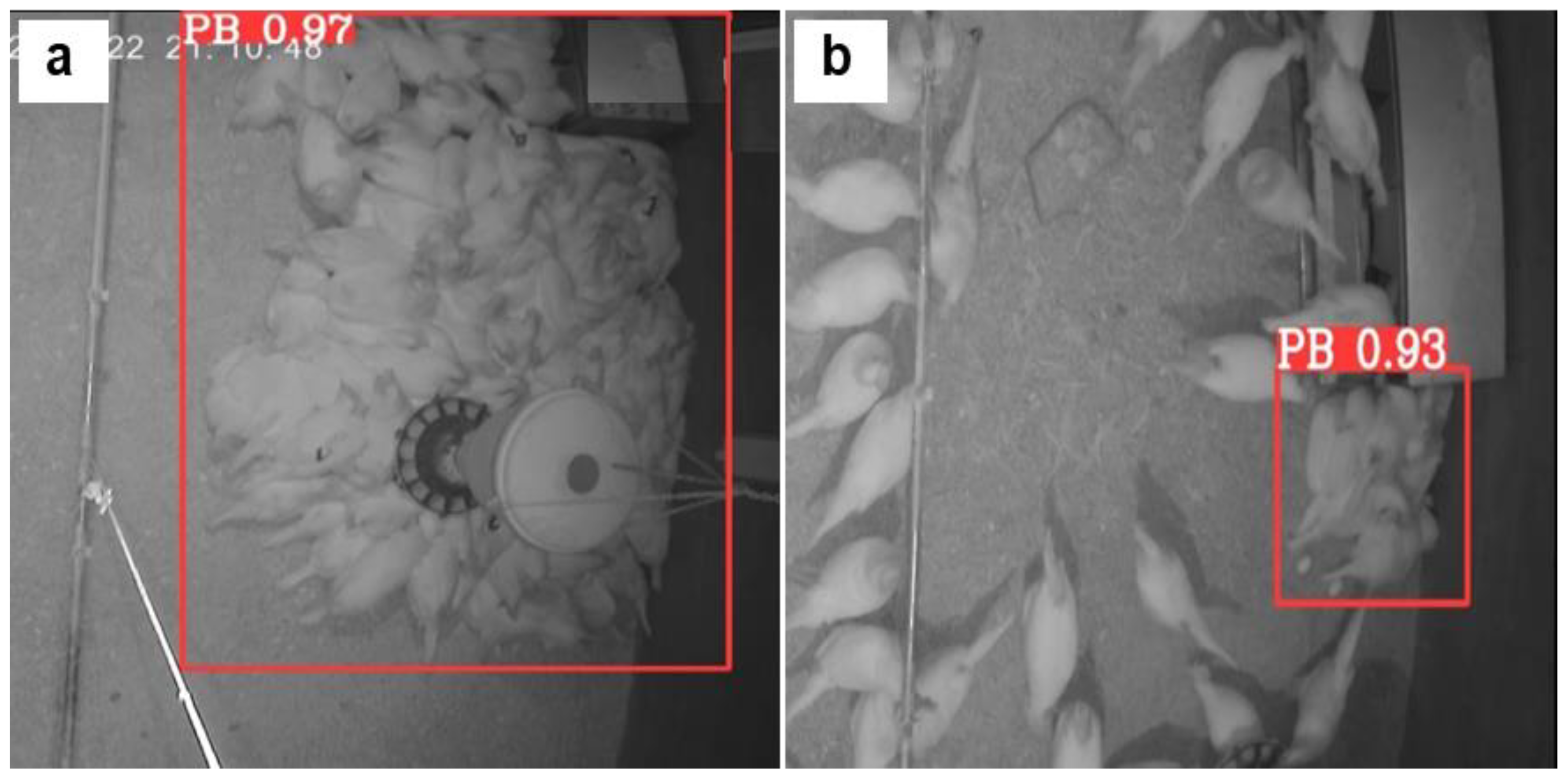
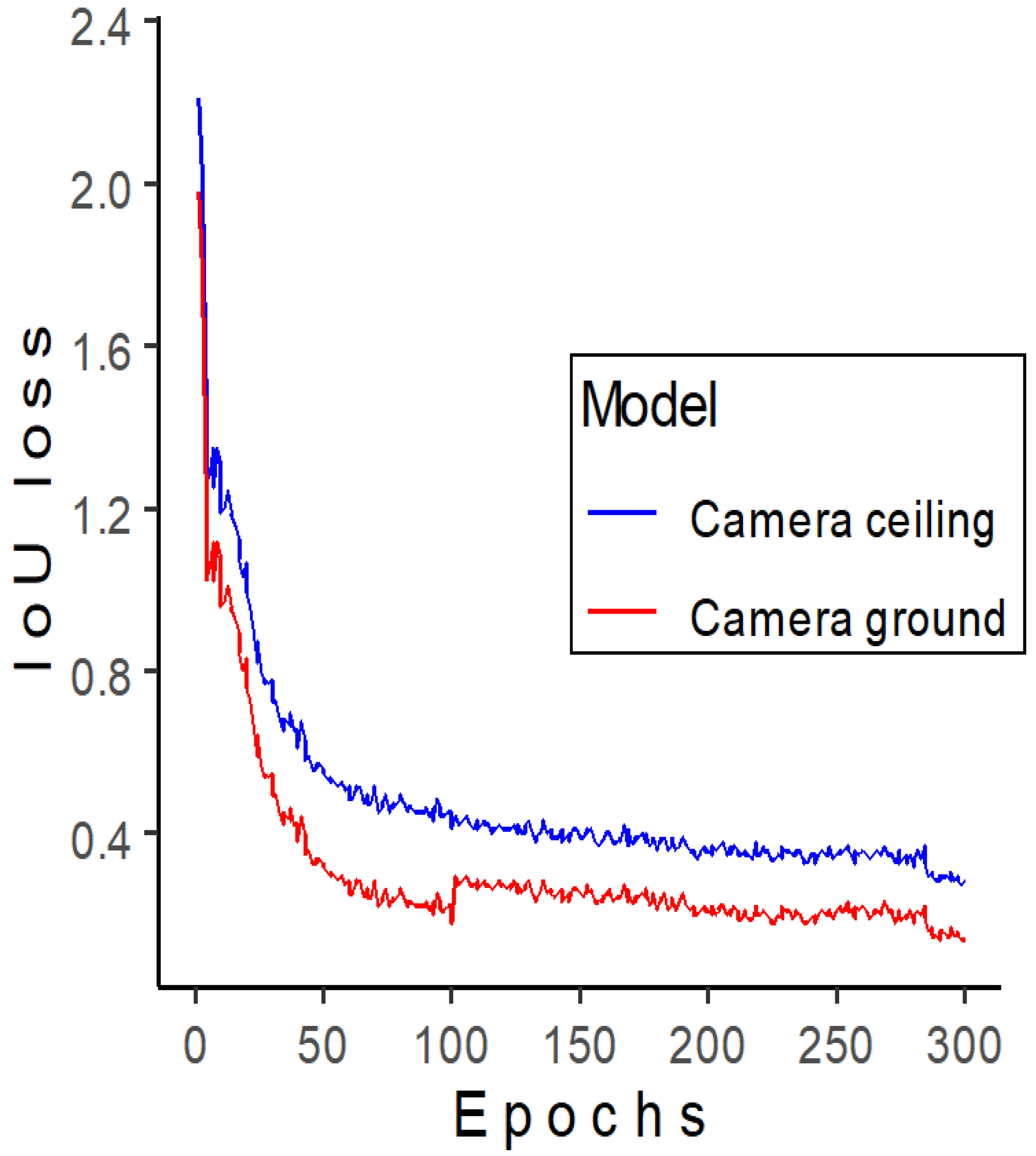
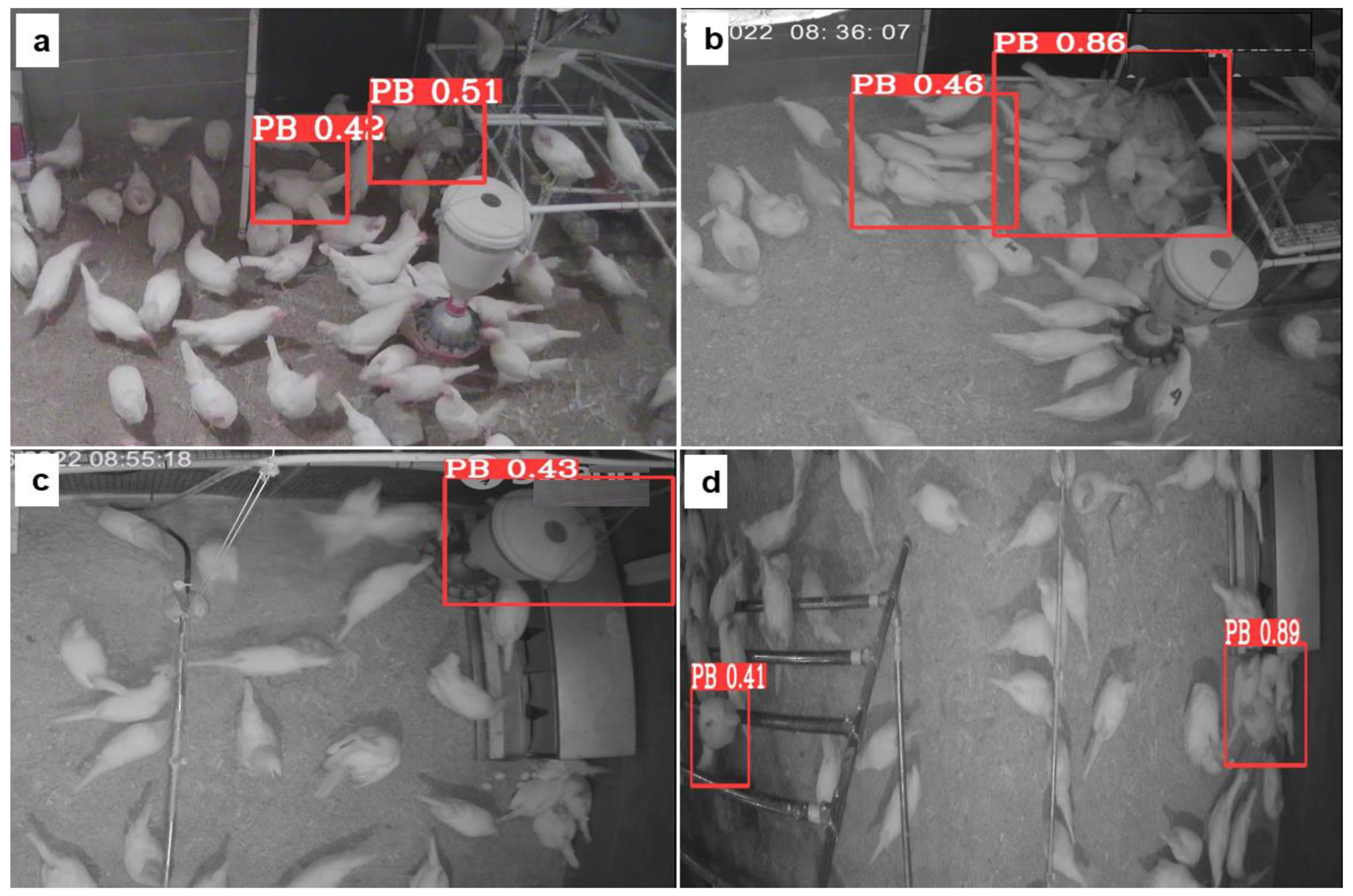
3.3. Performance of Piling Behavior under Different Camera Settings
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Campbell, D.; Makagon, M.; Swanson, J.; Siegford, J. Litter Use by Laying Hens in a Commercial Aviary: Dust Bathing and Piling. Poult. Sci. 2016, 95, 164–175. [Google Scholar] [CrossRef] [PubMed]
- Winter, J.; Toscano, M.J.; Stratmann, A. Piling Behaviour in Swiss Layer Flocks: Description and Related Factors. Appl. Anim. Behav. Sci. 2021, 236, 105272. [Google Scholar] [CrossRef]
- Gray, H.; Davies, R.; Bright, A.; Rayner, A.; Asher, L. Why Do Hens Pile? Hypothesizing the Causes and Consequences. Front. Vet. Sci. 2020, 7, 616836. [Google Scholar] [CrossRef] [PubMed]
- Rice, M.; Acharya, R.; Fisher, A.; Taylor, P.; Hemsworth, P. Characterising Piling Behaviour in Australian Free-Range Commercial Laying Hens. In ISAE 2020 Global Virtual Meeting: Online Programme Book; ISAE: Puch, Austria, 2020; p. 1. [Google Scholar]
- Barrett, J.; Rayner, A.; Gill, R.; Willings, T.; Bright, A. Smothering in UK Free-range Flocks. Part 1: Incidence, Location, Timing and Management. Vet. Rec. 2014, 175, 19. [Google Scholar] [CrossRef] [PubMed]
- Herbert, G.T.; Redfearn, W.D.; Brass, E.; Dalton, H.A.; Gill, R.; Brass, D.; Smith, C.; Rayner, A.C.; Asher, L. Extreme Crowding in Laying Hens during a Recurrent Smothering Outbreak. Vet. Rec. 2021, 188, e245. [Google Scholar] [CrossRef]
- Rayner, A.; Gill, R.; Brass, D.; Willings, T.; Bright, A. Smothering in UK Free-range Flocks. Part 2: Investigating Correlations between Disease, Housing and Management Practices. Vet. Rec. 2016, 179, 252. [Google Scholar] [CrossRef]
- Bright, A.; Johnson, E. Smothering in Commercial Free-Range Laying Hens: A Preliminary Investigation. Anim. Behav. 2011, 119, 203–209. [Google Scholar] [CrossRef]
- Marder, J.; Arad, Z. Panting and Acid-Base Regulation in Heat Stressed Birds. Comp. Biochem. Physiol. Part A Physiol. 1989, 94, 395–400. [Google Scholar] [CrossRef]
- Kang, H.; Park, S.; Jeon, J.; Kim, H.; Kim, S.; Hong, E.; Kim, C. Effect of Stocking Density on Laying Performance, Egg Quality and Blood Parameters of Hy-Line Brown Laying Hens in an Aviary System. Eur. Poult. Sci. 2018, 82, 245. [Google Scholar]
- Mashaly, M.; Hendricks, G., 3rd; Kalama, M.; Gehad, A.; Abbas, A.; Patterson, P. Effect of Heat Stress on Production Parameters and Immune Responses of Commercial Laying Hens. Poult. Sci. 2004, 83, 889–894. [Google Scholar] [CrossRef]
- Hartcher, K.M.; Jones, B. The Welfare of Layer Hens in Cage and Cage-Free Housing Systems. World’s Poult. Sci. J. 2017, 73, 767–782. [Google Scholar] [CrossRef]
- Campbell, D.L.; Hinch, G.N.; Downing, J.A.; Lee, C. Fear and Coping Styles of Outdoor-Preferring, Moderate-Outdoor and Indoor-Preferring Free-Range Laying Hens. Appl. Anim. Behav. Sci. 2016, 185, 73–77. [Google Scholar] [CrossRef]
- Gebhardt-Henrich, S.G.; Stratmann, A. What Is Causing Smothering in Laying Hens? Vet. Rec. 2016, 179, 250. [Google Scholar] [CrossRef] [PubMed]
- Riber, A.B. Development with Age of Nest Box Use and Gregarious Nesting in Laying Hens. Appl. Anim. Behav. Sci. 2010, 123, 24–31. [Google Scholar] [CrossRef]
- Giersberg, M.F.; Kemper, N.; Spindler, B. Pecking and Piling: The Behaviour of Conventional Layer Hybrids and Dual-Purpose Hens in the Nest. Appl. Anim. Behav. Sci. 2019, 214, 50–56. [Google Scholar] [CrossRef]
- Lentfer, T.L.; Gebhardt-Henrich, S.G.; Fröhlich, E.K.; von Borell, E. Influence of Nest Site on the Behaviour of Laying Hens. Appl. Anim. Behav. Sci. 2011, 135, 70–77. [Google Scholar] [CrossRef]
- Singh, R.; Cheng, K.; Silversides, F. Production Performance and Egg Quality of Four Strains of Laying Hens Kept in Conventional Cages and Floor Pens. Poult. Sci. 2009, 88, 256–264. [Google Scholar] [CrossRef]
- Villanueva, S.; Ali, A.; Campbell, D.; Siegford, J. Nest Use and Patterns of Egg Laying and Damage by 4 Strains of Laying Hens in an Aviary System1. Poult. Sci. 2017, 96, 3011–3020. [Google Scholar] [CrossRef] [PubMed]
- Altan, O.; Seremet, C.; Bayraktar, H. The Effects of Early Environmental Enrichment on Performance, Fear and Physiological Responses to Acute Stress of Broiler. Arch. Für Geflügelkunde 2013, 77, 23–28. [Google Scholar]
- Bist, R.B.; Subedi, S.; Chai, L.; Regmi, P.; Ritz, C.W.; Kim, W.K.; Yang, X. Effects of Perching on Poultry Welfare and Production: A Review. Poultry 2023, 2, 134–157. [Google Scholar] [CrossRef]
- Winter, J.; Toscano, M.J.; Stratmann, A. The Potential of a Light Spot, Heat Area, and Novel Object to Attract Laying Hens and Induce Piling Behaviour. Animal 2022, 16, 100567. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Chai, L.; Bist, R.B.; Subedi, S.; Wu, Z. A Deep Learning Model for Detecting Cage-Free Hens on the Litter Floor. Animals 2022, 12, 1983. [Google Scholar] [CrossRef]
- Yang, X.; Bist, R.; Subedi, S.; Chai, L. A deep learning method for monitoring spatial distribution of cage-free hens. Artif. Intell. Agric. 2023, 8, 20–29. [Google Scholar] [CrossRef]
- Subedi, S.; Bist, R.; Yang, X.; Chai, L. Tracking Pecking Behaviors and Damages of Cage-Free Laying Hens with Machine Vision Technologies. Comput. Electron. Agric. 2023, 204, 107545. [Google Scholar] [CrossRef]
- Subedi, S.; Bist, R.; Yang, X.; Chai, L. Tracking Floor Eggs with Machine Vision in Cage-Free Hen Houses. Poult. Sci. 2023, 102, 102637. [Google Scholar] [CrossRef] [PubMed]
- Sozzi, M.; Pillan, G.; Ciarelli, C.; Marinello, F.; Pirrone, F.; Bordignon, F.; Bordignon, A.; Xiccato, G.; Trocino, A. Measuring Comfort Behaviours in Laying Hens Using Deep-Learning Tools. Animals 2023, 13, 33. [Google Scholar] [CrossRef] [PubMed]
- Bist, R.B.; Yang, X.; Subedi, S.; Chai, L. Mislaying behavior detection in cage-free hens with deep learning technologies. Poult. Sci. 2023, 102729. [Google Scholar] [CrossRef]
- Pu, H.; Lian, J.; Fan, M. Automatic Recognition of Flock Behavior of Chickens with Convolutional Neural Network and Kinect Sensor. Int. J. Pattern. Recognit. Artif. Intell. 2018, 32, 7. [Google Scholar] [CrossRef]
- Wang, C.Y.; Liao, H.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A New Backbone that can Enhance Learning Capability of CNN. In Proceedings of the CVF Conference on Computer Vision and Pattern Recognition WorNshops (CVPRW), Seattle, WA, USA, 13–19 June 2020; pp. 1571–1580. [Google Scholar]
- Mtjhl, L. Meituan/YOLOv6 2023. Available online: https://github.com/meituan/YOLOv6 (accessed on 18 January 2023).
- Horvat, M.; Gledec, G. A Comparative Study of YOLOv5 Models Performance for Image Localization and Classification. In Proceedings of the Central European Conference on Information and Intelligent Systems, Dubrovnik, Croatia, 20–22 September 2023; pp. 349–356. [Google Scholar]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W. YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8759–8768. [Google Scholar]
- Weng, K.; Chu, X.; Xu, X.; Huang, J.; Wei, X. EfficientRep:An Efficient Repvgg-Style ConvNets with Hardware-Aware Neural Network Design. arXiv 2023, arXiv:2302.00386. [Google Scholar]
- Jocher, G. YOLOv5 (6.0/6.1) Brief Summary · Issue #6998 · Ultralytics/Yolov5. Available online: https://github.com/ultralytics/yolov5/issues/6998 (accessed on 10 March 2023).
- Aburaed, N.; Alsaad, M.; Mansoori, S.A.; Al-Ahmad, H. A Study on the Autonomous Detection of Impact Craters. In Proceedings of the Artificial Neural Networks in Pattern Recognition: 10th IAPR TC3 Workshop, ANNPR 2022, Dubai, United Arab Emirates, 24–26 November 2022; Springer International Publishing: Cham, Switzerland, 2022; pp. 181–194. [Google Scholar]
- Li, C.; Li, L.; Geng, Y.; Jiang, H.; Cheng, M.; Zhang, B.; Ke, Z.; Xu, X.; Chu, X. YOLOv6 v3. 0: A Full-Scale Reloading. arXiv 2023, arXiv:2301.05586. [Google Scholar] [CrossRef]
- Gregory, N.G. Physiology and Behaviour of Animal Suffering; John Wiley & Sons: Hoboken, NJ, USA, 2008; ISBN 1-4051-7302-5. Available online: https://books.google.com/books?hl=en&lr=&id=0bOZocGJMaAC&oi=fnd&pg=PR5&dq=Physiology+and+Behaviour+of+Animal+Suffering%3B+&ots=wJJQHce-sQ&sig=QF9zN5IbQGMMHKpGLcUnjR0cLNY#v=onepage&q=Physiology%20and%20Behaviour%20of%20Animal%20Suffering%3B&f=false (accessed on 25 December 2022).
- Martins Crispi, G.; Valente, D.S.M.; Queiroz, D.M.d.; Momin, A.; Fernandes-Filho, E.I.; Picanço, M.C. Using Deep Neural Networks to Evaluate Leafminer Fly Attacks on Tomato Plants. AgriEngineering 2023, 5, 273–286. [Google Scholar] [CrossRef]
- Sambasivam, G.A.O.G.D.; Opiyo, G.D. A predictive machine learning application in agriculture: Cassava disease detection and classification with imbalanced dataset using convolutional neural networks. Egypt. Inform. J. 2021, 22, 27–34. [Google Scholar] [CrossRef]
- Ni, J.Q.; Erasmus, M.A.; Croney, C.C.; Li, C.; Li, Y. A critical review of advancement in scientific research on food animal welfare-related air pollution. J. Hazard. Mater. 2021, 408, 124468. [Google Scholar] [CrossRef]
- Ni, J.Q.; Heber, A.J.; Darr, M.J.; Lim, T.T.; Diehl, C.A.; Bogan, B.W. Air quality monitoring and on-site computer system for livestock and poultry environment studies. Trans. ASABE 2009, 52, 937–947. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Original Dataset | Train (70%) | Validation (20%) | Test (10%) |
|---|---|---|---|---|
| PBceiling | 1500 | 1050 | 300 | 150 |
| PBground | 1500 | 1050 | 300 | 150 |
| PBdaytime | 3000 | 2100 | 600 | 300 |
| PBnighttime | 3000 | 2100 | 600 | 300 |
| PBmodel | 3000 | 2100 | 600 | 300 |
| Configuration | Parameters |
|---|---|
| CPU | 64 core OCPU |
| GPU (4 counts) | 4 × NVIDIA® A10 (24 GB) |
| Operating system | Ubuntu 22.10 |
| Accelerated environment | NVIDIA CUDA |
| Memory | 1024 GB |
| Drive (2 counts) | 7.68 TB NVMe SSD |
| Libraries | Torch 1.7.0, Torch-vision 0.8.1, OpenCV-python 4.1.1, NumPy 1.18.5 |
| Performance Metrics | YOLOv6t- PB | YOLOv6n-PB | YOLOv6s-PB | YOLOv6m- PB | YOLOv6l- PB | YOLOv6l relu- PB |
|---|---|---|---|---|---|---|
| Average Recall (%) | 67.6 | 69.8 | 69.1 | 70.2 | 69.8 | 70.6 |
| [email protected] (%) | 97.6 | 98.9 | 98.5 | 98.1 | 96.3 | 98.9 |
| [email protected] (%) | 67.3 | 70.6 | 70.1 | 73.9 | 73.5 | 74.6 |
| [email protected]:0.95 (%) | 60.7 | 62.8 | 62.2 | 63.4 | 62.4 | 63.7 |
| Training time (hrs) | 2.03 | 2.04 | 2.07 | 2.97 | 3.23 | 4.24 |
| Data Summary | Average Recall (%) | [email protected] (%) | [email protected] (%) | [email protected]:0.95 (%) |
|---|---|---|---|---|
| YOLOv6l relu-nighttime | 89.4 | 98.9 | 98.8 | 87.0 |
| YOLOv6l relu-daytime | 70.6 | 98.0 | 72.0 | 63.5 |
| Camera Settings | Average Recall (%) | [email protected] (%) | [email protected] (%) | [email protected]:0.95 (%) |
|---|---|---|---|---|
| YOLOv6l relu-ceiling | 63.8 | 93.1 | 54.0 | 54.5 |
| YOLOv6l relu-ground | 66.8 | 96.4 | 56.9 | 57.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bist, R.B.; Subedi, S.; Yang, X.; Chai, L. A Novel YOLOv6 Object Detector for Monitoring Piling Behavior of Cage-Free Laying Hens. AgriEngineering 2023, 5, 905-923. https://doi.org/10.3390/agriengineering5020056
Bist RB, Subedi S, Yang X, Chai L. A Novel YOLOv6 Object Detector for Monitoring Piling Behavior of Cage-Free Laying Hens. AgriEngineering. 2023; 5(2):905-923. https://doi.org/10.3390/agriengineering5020056
Chicago/Turabian StyleBist, Ramesh Bahadur, Sachin Subedi, Xiao Yang, and Lilong Chai. 2023. "A Novel YOLOv6 Object Detector for Monitoring Piling Behavior of Cage-Free Laying Hens" AgriEngineering 5, no. 2: 905-923. https://doi.org/10.3390/agriengineering5020056
APA StyleBist, R. B., Subedi, S., Yang, X., & Chai, L. (2023). A Novel YOLOv6 Object Detector for Monitoring Piling Behavior of Cage-Free Laying Hens. AgriEngineering, 5(2), 905-923. https://doi.org/10.3390/agriengineering5020056