Integrated Braking Control for Electric Vehicles with In-Wheel Propulsion and Fully Decoupled Brake-by-Wire System

 , ,
, ,  ,
,
Abstract
:
1. Introduction
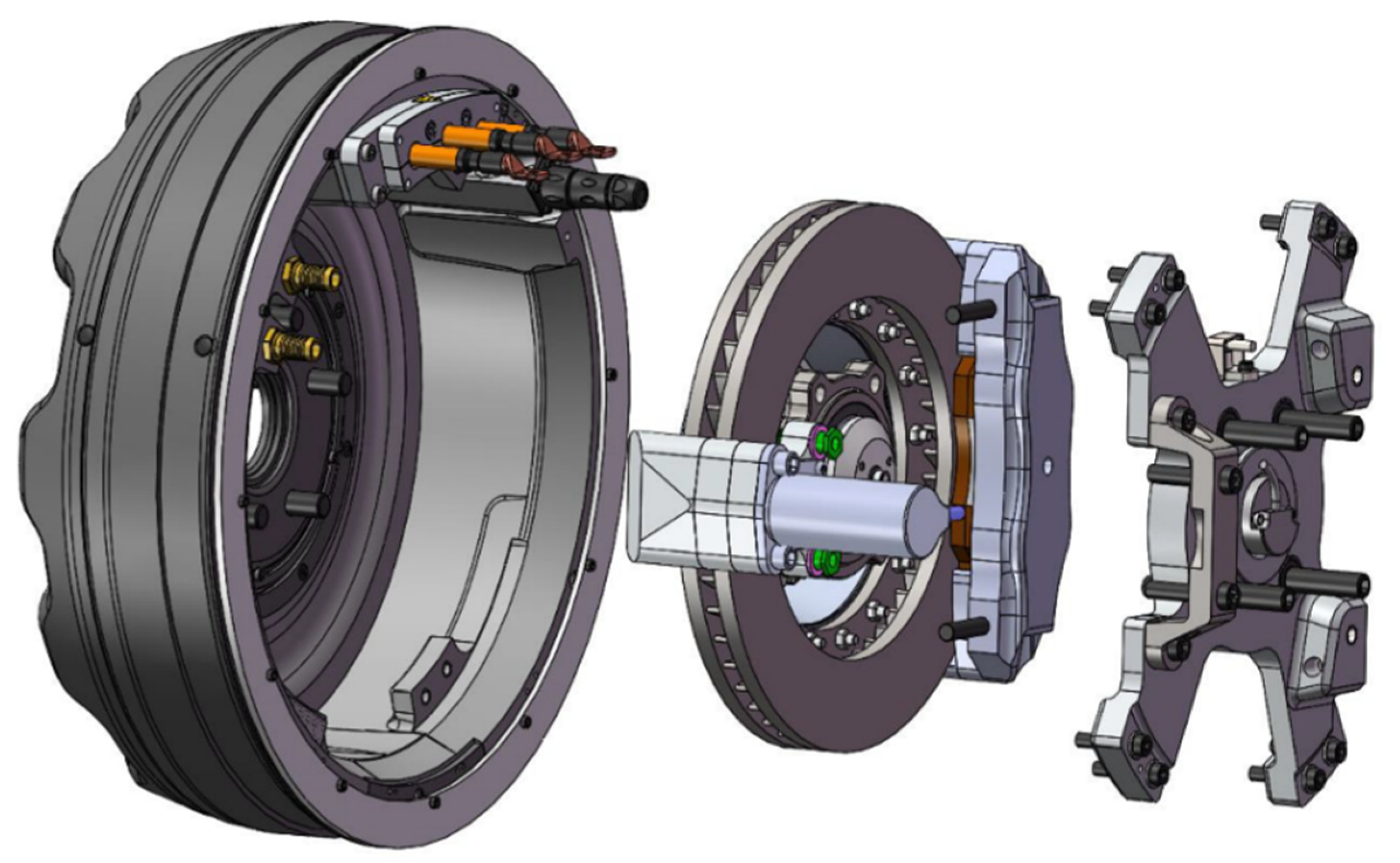
2. Description of the Mechatronic Systems
3. Observer Design
- i
- The observer becomes inactive if the steering angle (δSW, see Figure 5) or the corresponding yaw rate () exceeds a fixed threshold because of its inability to account for inertial components associated with cornering.
- ii
- At vehicle speeds under 5 km/h, the vehicle mass observer is switched off to avoid unnecessary noise.
- iii
- Solving Equation (3) requires the driving force, so observation of vehicle mass is only active when the gas pedal displacement exceeds a minimum of 20%.
- iv
- Upon exceeding a minimum gas pedal position, the wheel load observer becomes inactive, provided that no excessive wheel slip is detected.
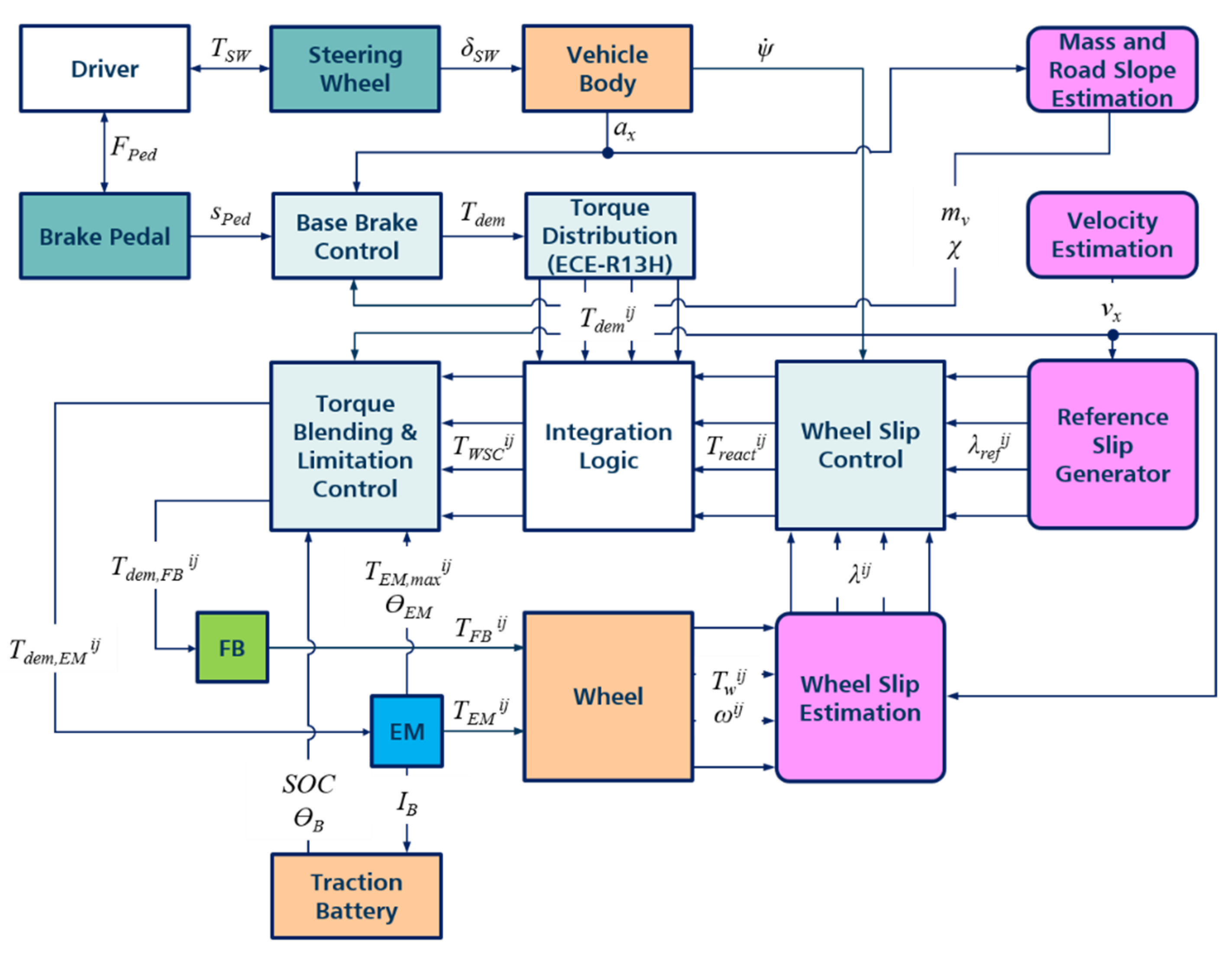
4. Controller Design
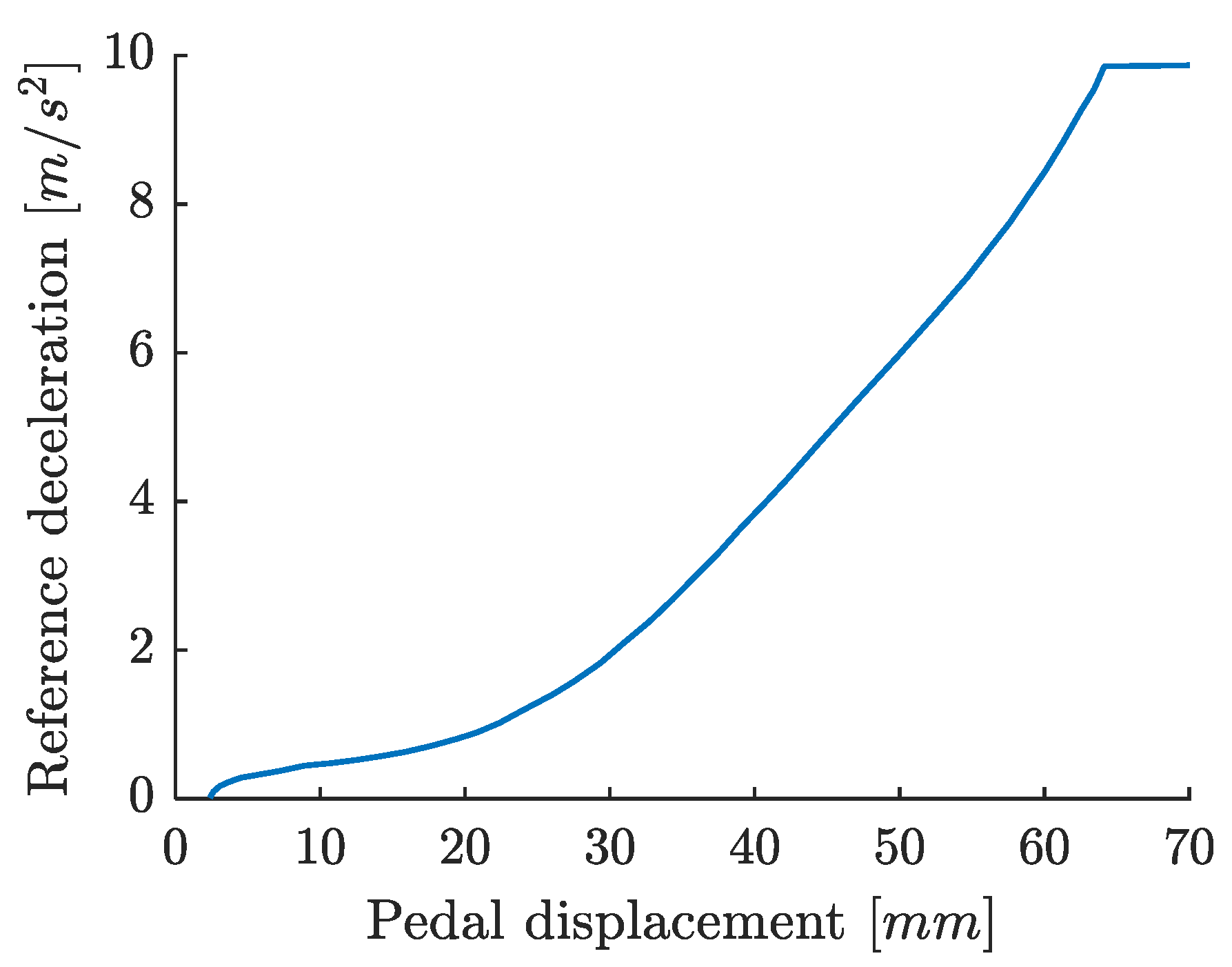
4.1. Base Brake Controller
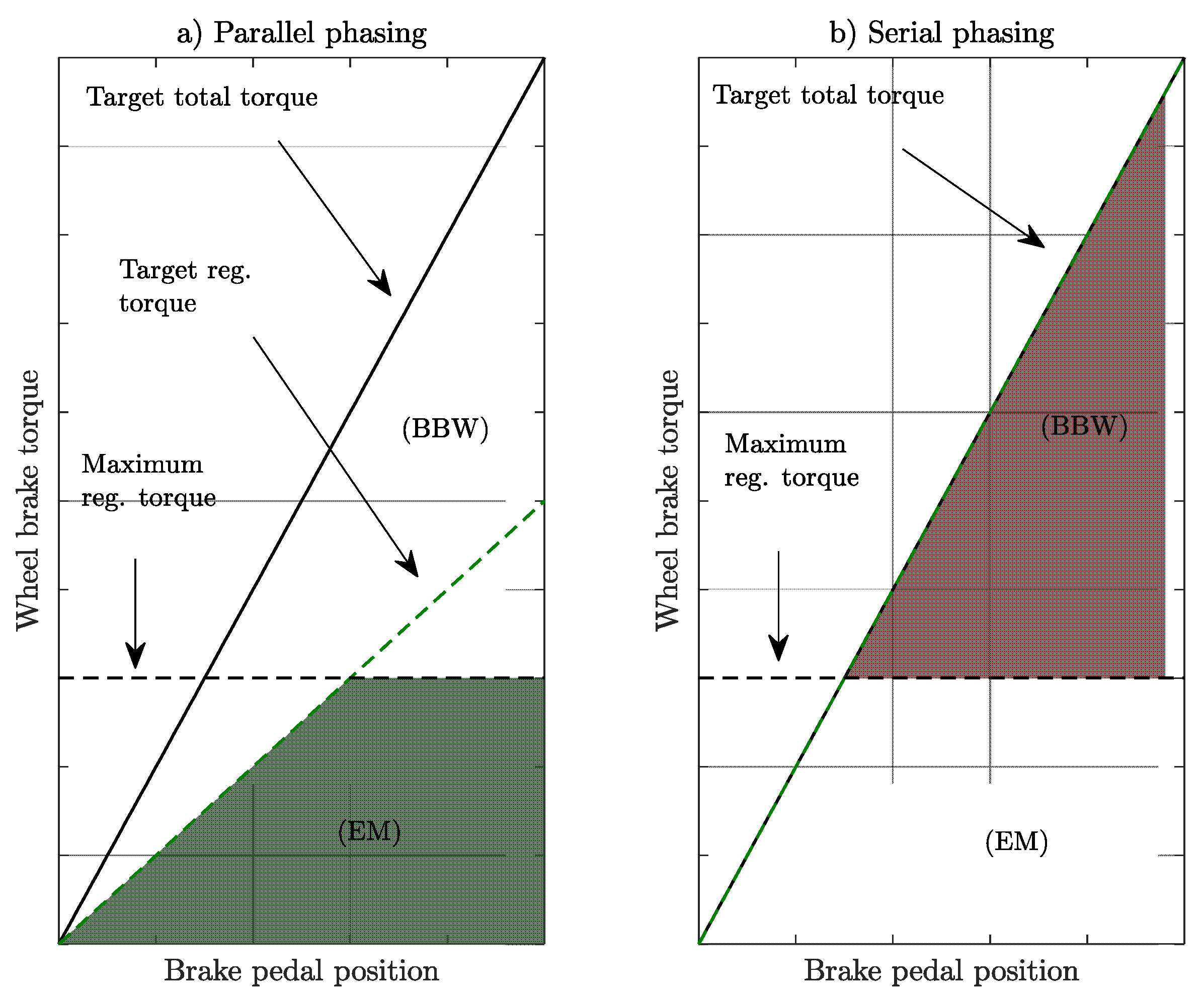
4.2. Torque Blending Controller
- i
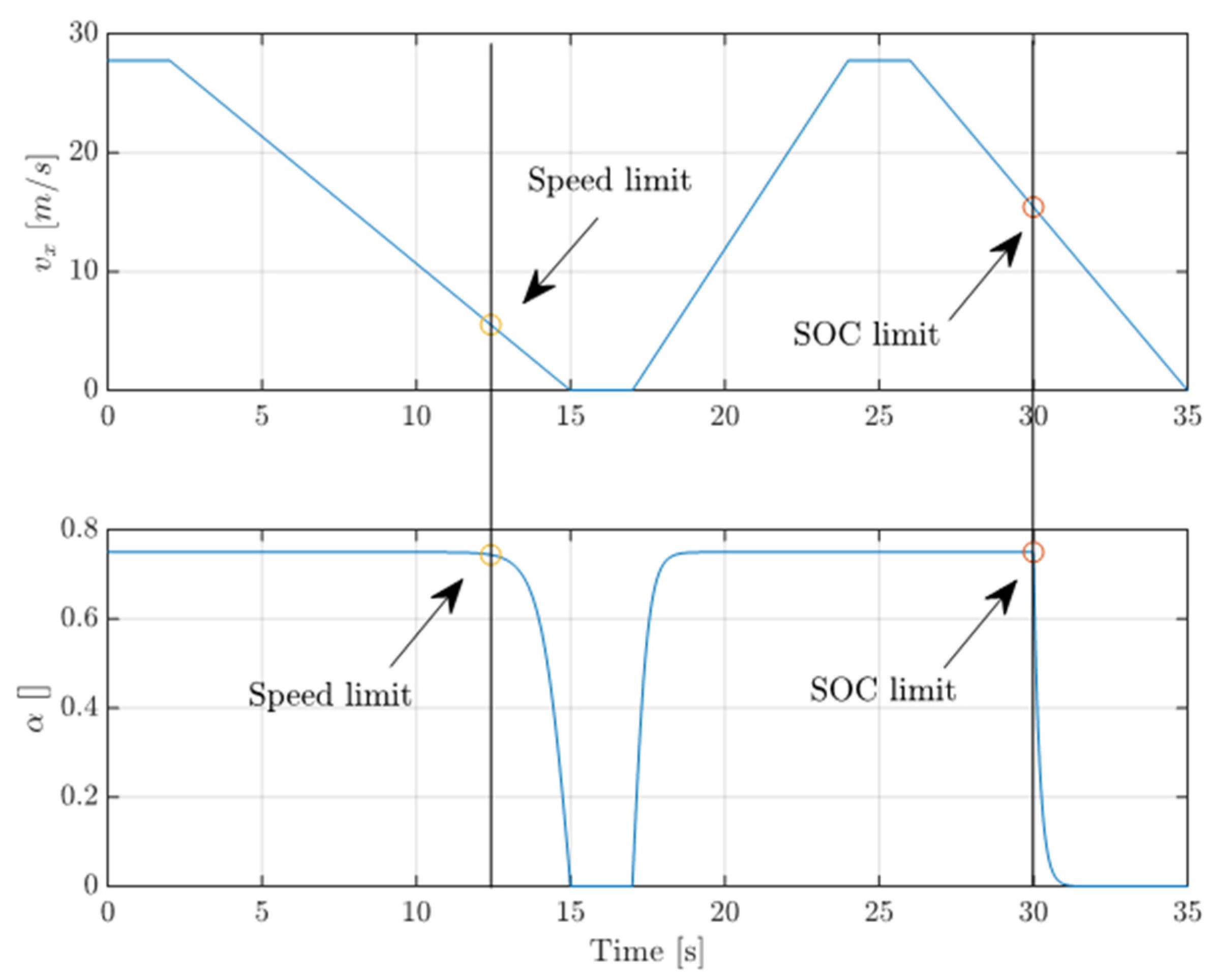
- Battery state of X (SOX): in particular, the charging current (IB) and cell voltages are used for prediction of the state of charge (SOC).
- ii
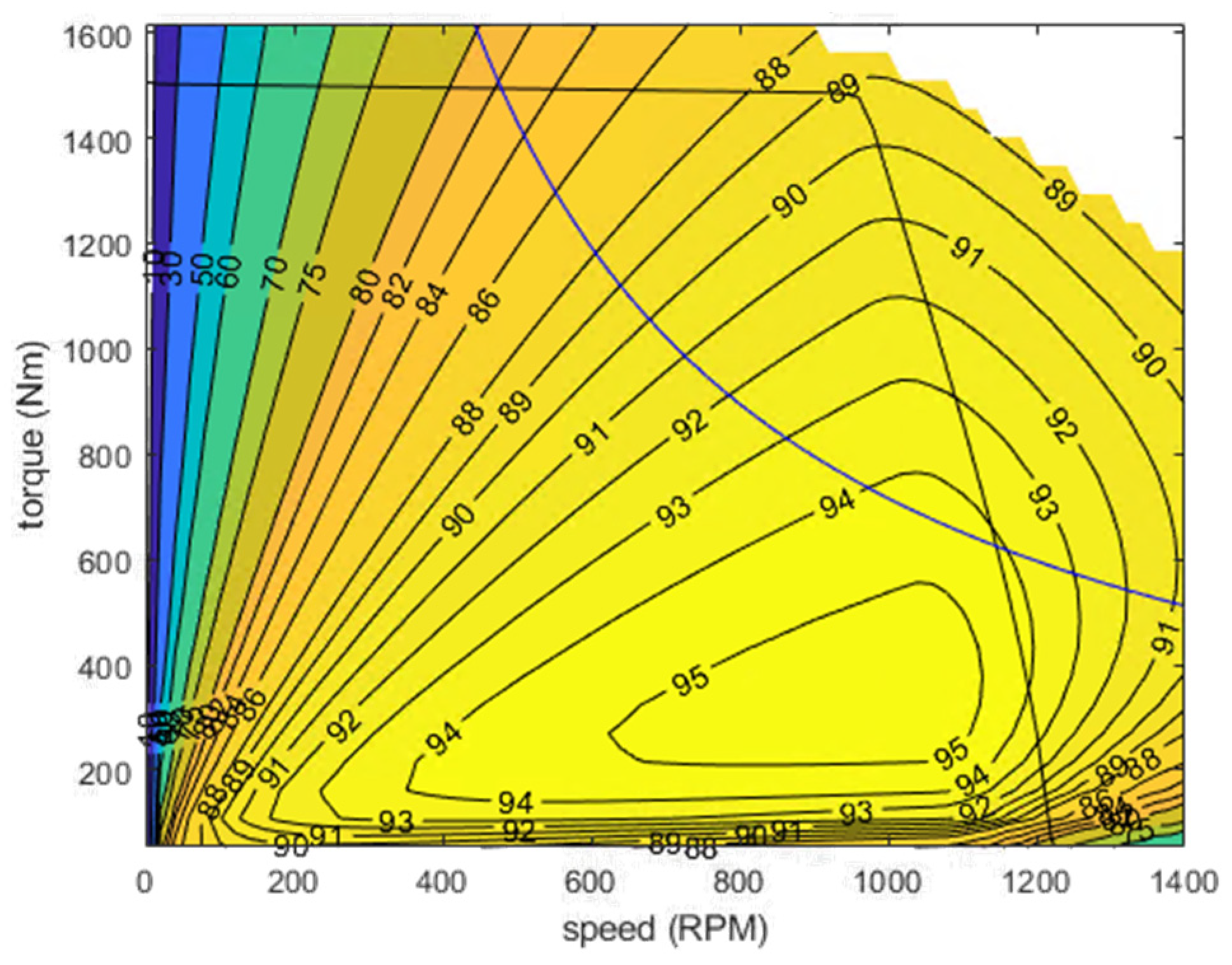
- Vehicle speed (vx) at higher speeds, the maximum electric torque is reduced by power restrictions and, at low speeds, only friction torque is usedas energy recuperation is not provided.
- iii
- Motor/battery temperature (θEM, θB): it might be necessary to reduce the electric motor torque request to avoid excessive overheating of components.
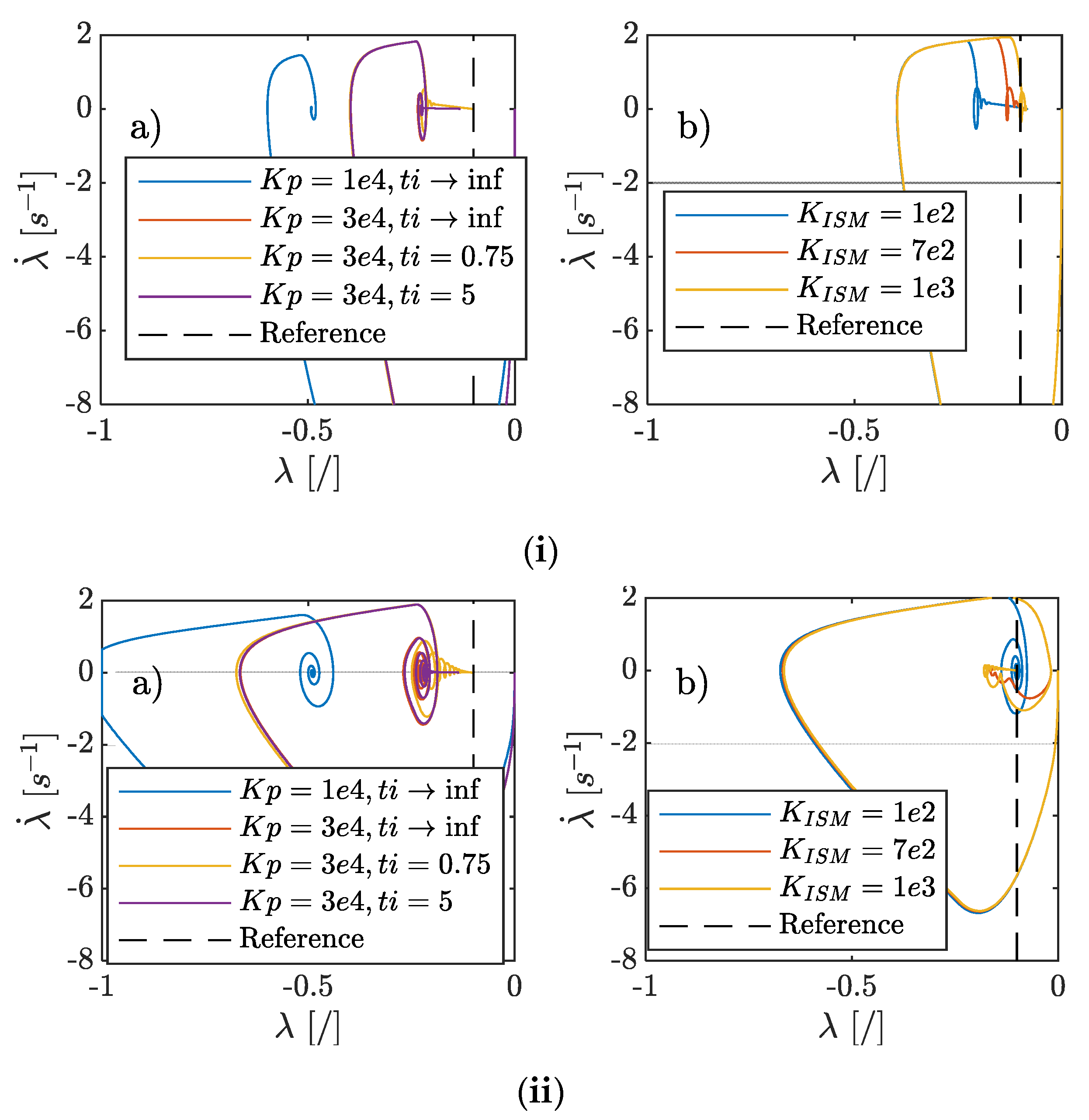
4.3. Wheel Slip Controller
4.3.1. Proportional Integral Control with Anti-Windup
4.3.2. Integral Sliding Mode Control
5. Real-Time Integration and Experimental Studies
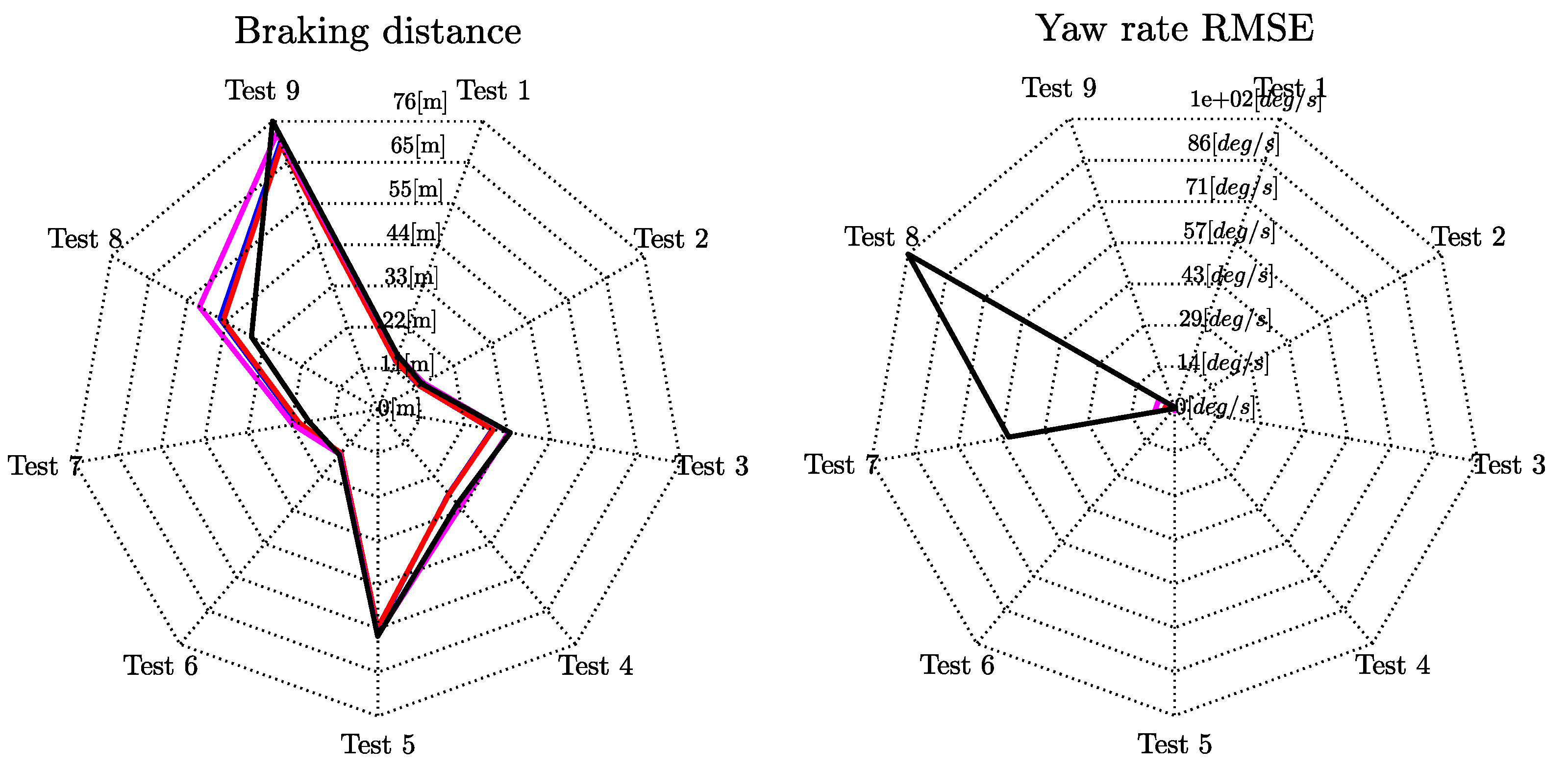
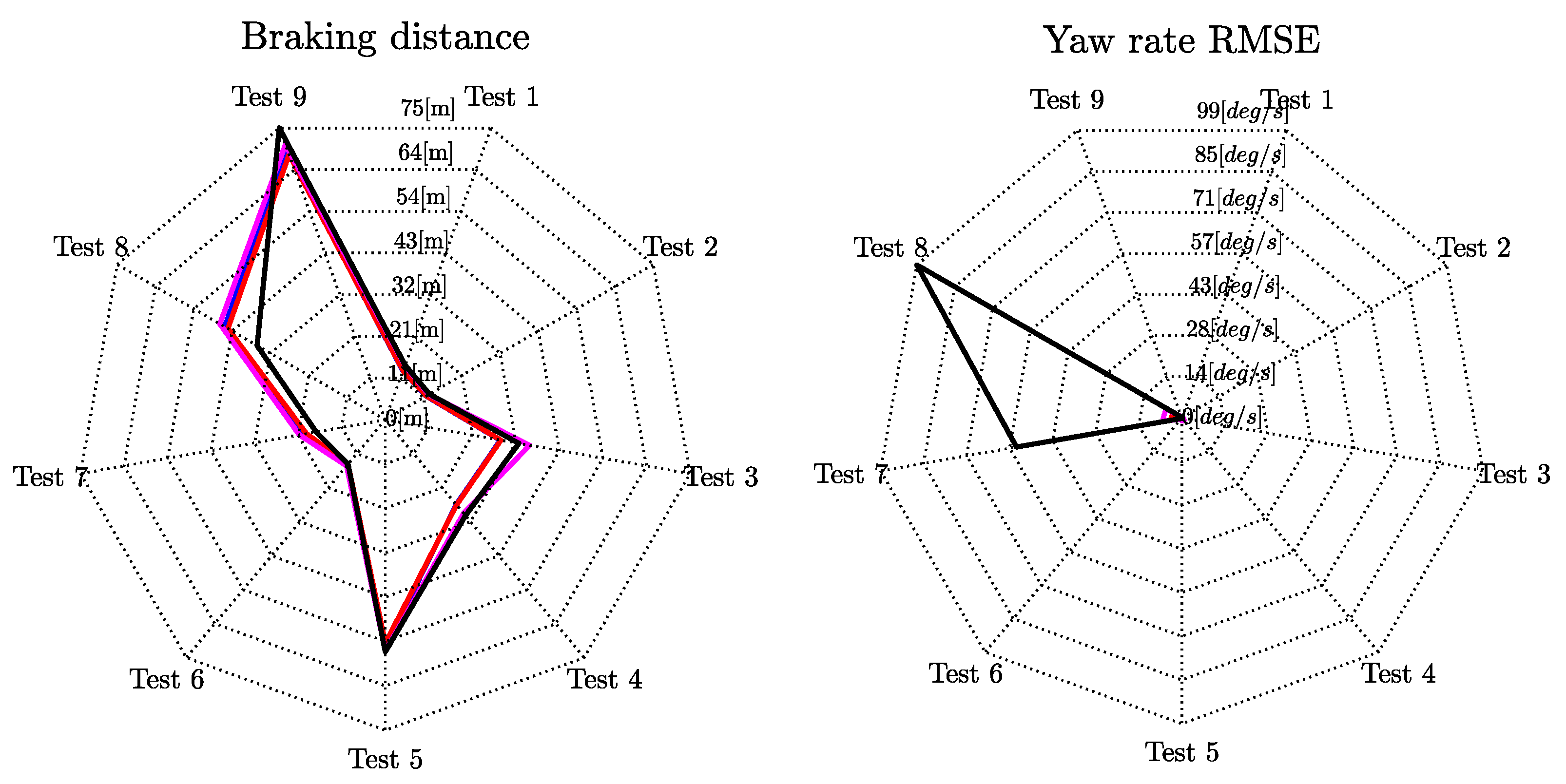
- (A)
- Braking distance (safety criterion)
- (B)
- Root-mean square error (RMSE) of the vehicle yaw rate (stability criterion)
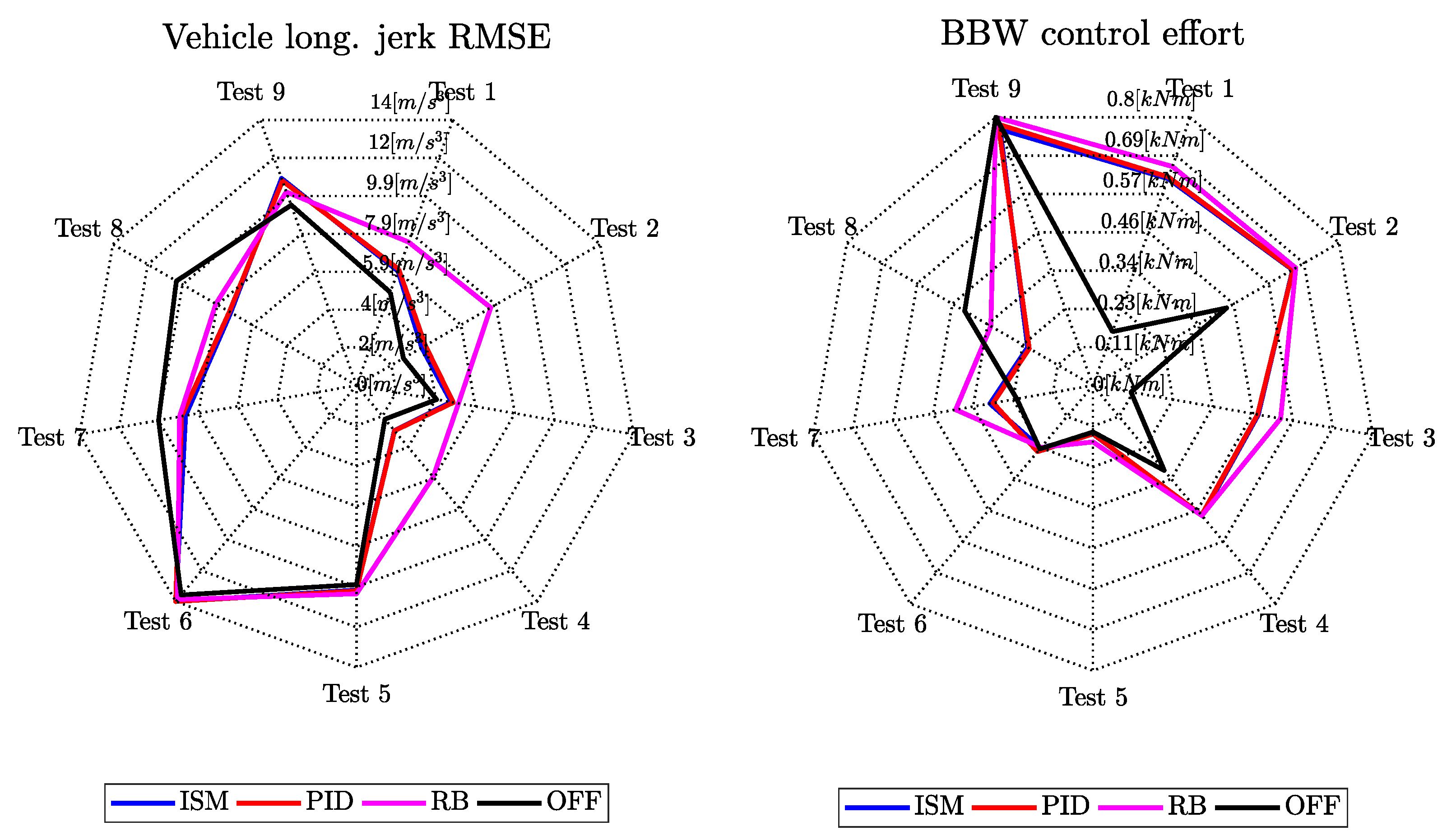
- (C)
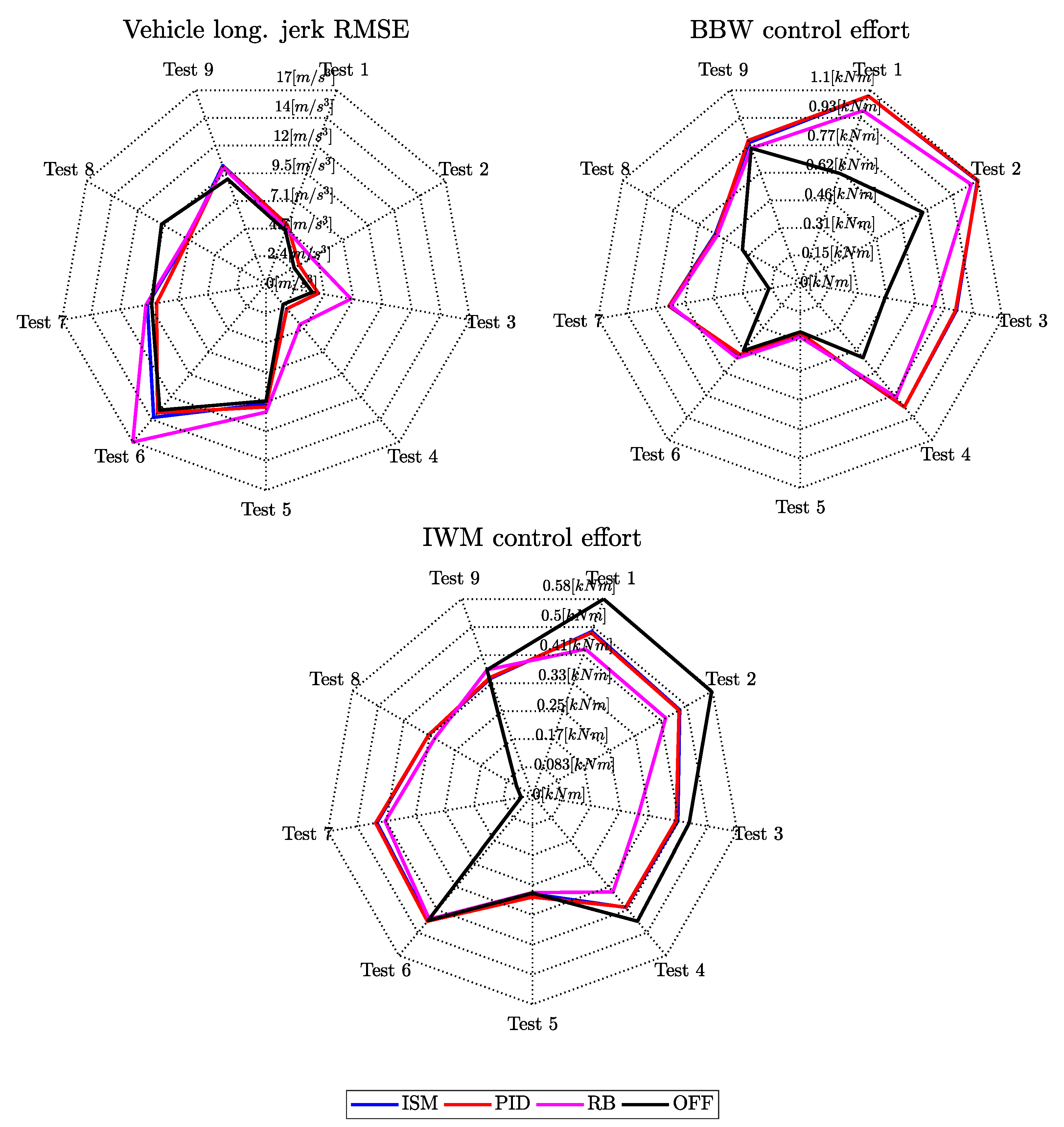
- Root-mean square error of the vehicle longitudinal jerk (comfort criterion)
- (D)
- Normalized integral of the absolute value of the control action (IACA)
6. Conclusions
- i
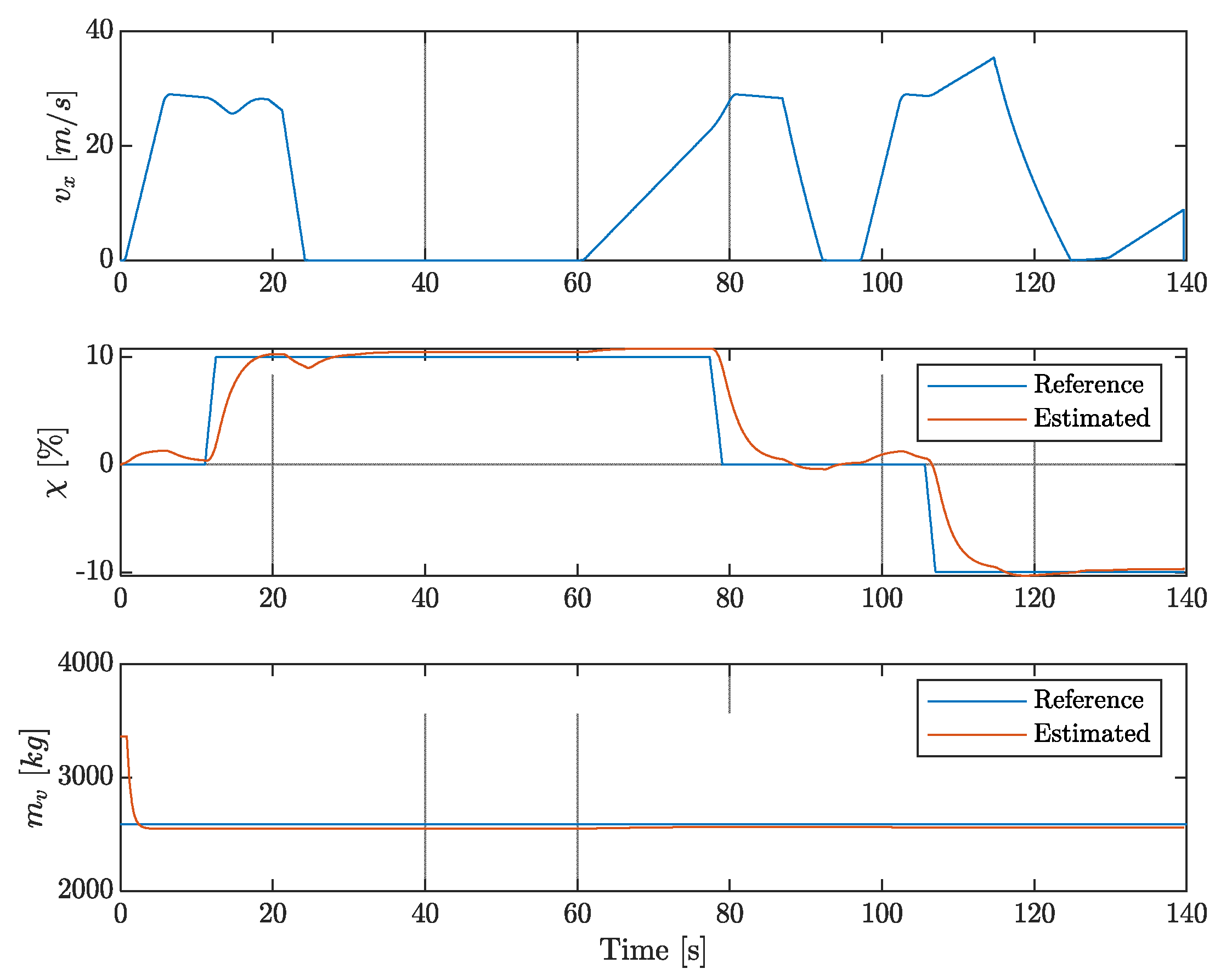
- The developed observers were able to detect variations in vehicle mass and road slope for internal compensation properly.
- ii
- The enhanced blending functionality was able to consider limitation factors in order to switch between torque blending and full electric/friction braking.
- iii
- Due to their higher dynamics, the usage of electric in-wheel motors showed advantages for wheel slip control compared with the rule-based control, especially in terms of vehicle stability and ride comfort.
- iv
- The experimental investigations showed the PI and ISM robustness for variation of the tire-road-friction coefficient and different initial vehicle speeds.
- v
- On a µ-split surface, the continuous control improved vehicle stability by up to >97%, which is nearly 10% more than the rule-based approach.
- vi
- PI and ISM control showed a significant reduction of vehicle longitudinal jerk of ~30%, while the rule-based improvement was only about 22%.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B


References
- Jonner, W.-D.; Winner, H.; Dreilich, L.; Schunck, E. Electrohydraulic Brake System—The First Approach to Brake-By-Wire Technology. SAE Tech. Pap. Ser. 1996. [Google Scholar] [CrossRef]
- Savaresi, S.M.; Tanelli, M. Active Braking Control Systems Design for Vehicles; Springer: London, UK, 2010. [Google Scholar]
- Ganzel, B. Slip Control Boost Braking System. U.S. Patent 9,221,443, 29 December 2015. [Google Scholar]
- Kim, J.G.; Kim, M.J.; Kim, J.K.; Noh, K.-H. Developing of Electronic Wedge Brake with Cross Wedge; SAE Technical Paper Series; Paper No. 2009-01-0856; SAE International: Grand Rapids, MI, USA, 2009. [Google Scholar] [CrossRef]
- Jo, C.; Hwang, S.; Kim, H. Clamping-Force Control for Electromechanical Brake. IEEE Trans. Veh. Technol. 2010, 59, 3205–3212. [Google Scholar] [CrossRef]
- Choi, C.; Lee, K.; Lee, W. Observer-Based Phase-Shift Fault Detection Using Adaptive Threshold for Rotor Position Sensor of Permanent-Magnet Synchronous Machine Drives in Electromechanical Brake. IEEE Trans. Ind. Electron. 2014, 62, 1964–1974. [Google Scholar] [CrossRef]
- Yu, L.; Ma, L.; Song, J.; Liu, X. Magnetorheological and Wedge Mechanism-Based Brake-by-Wire System with Self-Energizing and Self-Powered Capability by Brake Energy Harvesting. IEEE/ASME Trans. Mechatron. 2016, 21, 2568–2580. [Google Scholar] [CrossRef]
- Cheon, J.S.; Kim, J.; Jeon, J. New Brake by Wire Concept with Mechanical Backup. SAE Int. J. Passeng. Cars Mech. Syst. 2012, 5, 1194–1198. [Google Scholar] [CrossRef]
- Chen, P.; Wu, J.; Zhao, J.; He, R.; Liu, H.; Zhang, K. Design and Position Control of a Novel Electric Brake Booster. SAE Int. J. Passeng. Cars Mech. Syst. 2018, 11, 389–400. [Google Scholar] [CrossRef]
- Gong, X.; Qian, L.; Ge, W.; Wang, L. Research on the Anti-Disturbance Control Method of Brake-by-Wire Unit for Electric Vehicles. World Electr. Veh. J. 2019, 10, 44. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Lv, C.; Zhang, J.; Zhang, Y.; Ma, W. High-Precision Modulation of a Safety-Critical Cyber-Physical System: Control Synthesis and Experimental Validation. IEEE/ASME Trans. Mechatron. 2018, 23, 2599–2608. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, J.; Li, Y.; Li, C. A Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop Tests. IEEE Trans. Veh. Technol. 2018, 67, 11440–11452. [Google Scholar] [CrossRef]
- Xiong, L.; Han, W.; Yu, Z.; Lin, J.; Xu, S. Master cylinder pressure reduction logic for cooperative work between elec-tro-hydraulic brake system and anti-lock braking system based on speed servo system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3042–3055. [Google Scholar] [CrossRef]
- Park, G.; Choi, S.B. Clamping force control based on dynamic model estimation for electromechanical brakes. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 232, 2000–2013. [Google Scholar] [CrossRef]
- Kim, C.; Kim, Y.; Kwon, O.; Seo, J.; Lee, D.; Yi, H. An application of the brain limbic system–based control to the electro-mechanical brake system. Adv. Mech. Eng. 2018, 10, 1687814018755215. [Google Scholar] [CrossRef] [Green Version]
- Kwon, Y.; Kim, J.; Cheon, J.S.; Moon, H.-I.; Chae, H.J. Multi-Objective Optimization and Robust Design of Brake by Wire System Components. SAE Int. J. Passeng. Cars Mech. Syst. 2013, 6, 1465–1475. [Google Scholar] [CrossRef]
- Lee, C.F.; Manzie, C. Active brake judder attenuation using an electromechanical brake-by-wire system. IEEE/ASME Trans. Mechatron. 2016, 21, 1. [Google Scholar] [CrossRef]
- Nadeau, J.; Micheau, P.; Boisvert, M. Collaborative control of a dual electro-hydraulic regenerative brake system for a rear-wheel-drive electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 233, 1035–1046. [Google Scholar] [CrossRef]
- Li, L.; Li, X.; Wang, X.; Liu, Y.; Song, J.; Ran, X. Transient switching control strategy from regenerative braking to anti-lock braking with a semi-brake-by-wire system. Veh. Syst. Dyn. 2016, 54, 231–257. [Google Scholar] [CrossRef]
- Li, W.; Du, H.; Li, W. A new torque distribution strategy for blended anti-lock braking systems of electric vehicles based on road conditions and driver’s intentions. SAE Int. J. Passeng. Cars Mech. Syst. 2016, 9, 107–115. [Google Scholar] [CrossRef] [Green Version]
- Aksjonov, A.; Ricciardi, V.; Augsburg, K.; Vodovozov, V.; Petlenkov, E. Hardware-in-the-Loop Test of an Open Loop Fuzzy Control Method for Decoupled Electro-Hydraulic Antilock Braking System. IEEE Trans. Fuzzy Syst. 2020, 1. [Google Scholar] [CrossRef]
- Pretagostini, F.; Ferranti, L.; Berardo, G.; Ivanov, V.; Shyrokau, B. Survey on wheel slip control design strategies, evaluation and application to antilock braking systems. IEEE Access 2020, 8, 10951–10970. [Google Scholar] [CrossRef]
- Savitski, D.; Ivanov, V.; Augsburg, K.; Emmei, T.; Fuse, H.; Fujimoto, H.; Fridman, L.M. Wheel Slip Control for the Electric Vehicle With In-Wheel Motors: Variable Structure and Sliding Mode Methods. IEEE Trans. Ind. Electron. 2019, 67, 8535–8544. [Google Scholar] [CrossRef]
- Szewczyk, B.; Ciotti, A.; Cappelletti, L. Distributed brake-by-wire system for next-generation road vehicles. In Proceedings of the 9th International Munich Chassis Symposium, Munich, Germany, 26 September 2018; pp. 633–644. [Google Scholar]
- Altmannshofer, S.; Endisch, C. Robust vehicle mass and driving resistance estimation. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2016; pp. 6869–6874. [Google Scholar]
- Savistki, D. Recent Advancements in Continuous Wheel Slip Control. In Advances in Dynamics of Vehicles on Roads and Tracks; Springer: Basel, Switzerland, 2019; pp. 1525–1535. [Google Scholar]
- Pennycott, A.; De Novellis, L.; Gruber, P.; Sorniotti, A. Optimal braking force allocation for a four-wheel drive fully electric vehicle. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2014, 228, 621–628. [Google Scholar] [CrossRef] [Green Version]
- Economic Commission for Europe. Uniform Provision Concerning the Approval of Vehicles of Categories M, N and O with Regard to Braking; Regulation No. 13; United Nations Economic Commission for Europe: Geneva, Switzerland, 2014. [Google Scholar]
- Ulsoy, A.G.; Peng, H.; Cakmakci, M. Antilock Brake and Traction-Control Systems. In Automotive Control Systems; Cambridge University Press (CUP): Cambridge, UK, 2013; pp. 232–256. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Rdisc | Effective brake disc radius | 0.167 | m |
| APist | Cross-section of brake caliper piston | 317.615 | mm2 |
| µbr | Brake disc-to-pad friction coefficient | 0.43 | - |
| Test-ID | Friction Coefficient µr (–) | Pedal Application Speed dsPed/dt (mm/s) | Initial Vehicle Speed vinit (km/h) |
|---|---|---|---|
| Test 1 | 0.4 | 0.4 | 200 | 40 |
| Test 2 | 50 | ||
| Test 3 | 200 | 60 | |
| Test 4 | 50 | ||
| Test 5 | 0.9 | 0.9 | 200 | 60 |
| Test 6 | 120 | ||
| Test 7 | 0.4 | 0.9 | 60 | |
| Test 8 | 90 | ||
| Test 9 | patch | 120 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heydrich, M.; Ricciardi, V.; Ivanov, V.; Mazzoni, M.; Rossi, A.; Buh, J.; Augsburg, K. Integrated Braking Control for Electric Vehicles with In-Wheel Propulsion and Fully Decoupled Brake-by-Wire System. Vehicles 2021, 3, 145-161. https://doi.org/10.3390/vehicles3020009
Heydrich M, Ricciardi V, Ivanov V, Mazzoni M, Rossi A, Buh J, Augsburg K. Integrated Braking Control for Electric Vehicles with In-Wheel Propulsion and Fully Decoupled Brake-by-Wire System. Vehicles. 2021; 3(2):145-161. https://doi.org/10.3390/vehicles3020009
Chicago/Turabian StyleHeydrich, Marius, Vincenzo Ricciardi, Valentin Ivanov, Matteo Mazzoni, Alessandro Rossi, Jože Buh, and Klaus Augsburg. 2021. "Integrated Braking Control for Electric Vehicles with In-Wheel Propulsion and Fully Decoupled Brake-by-Wire System" Vehicles 3, no. 2: 145-161. https://doi.org/10.3390/vehicles3020009
APA StyleHeydrich, M., Ricciardi, V., Ivanov, V., Mazzoni, M., Rossi, A., Buh, J., & Augsburg, K. (2021). Integrated Braking Control for Electric Vehicles with In-Wheel Propulsion and Fully Decoupled Brake-by-Wire System. Vehicles, 3(2), 145-161. https://doi.org/10.3390/vehicles3020009