
Battery Management System for Unmanned Electric Vehicles with CAN BUS and Internet of Things



Abstract
:1. Introduction
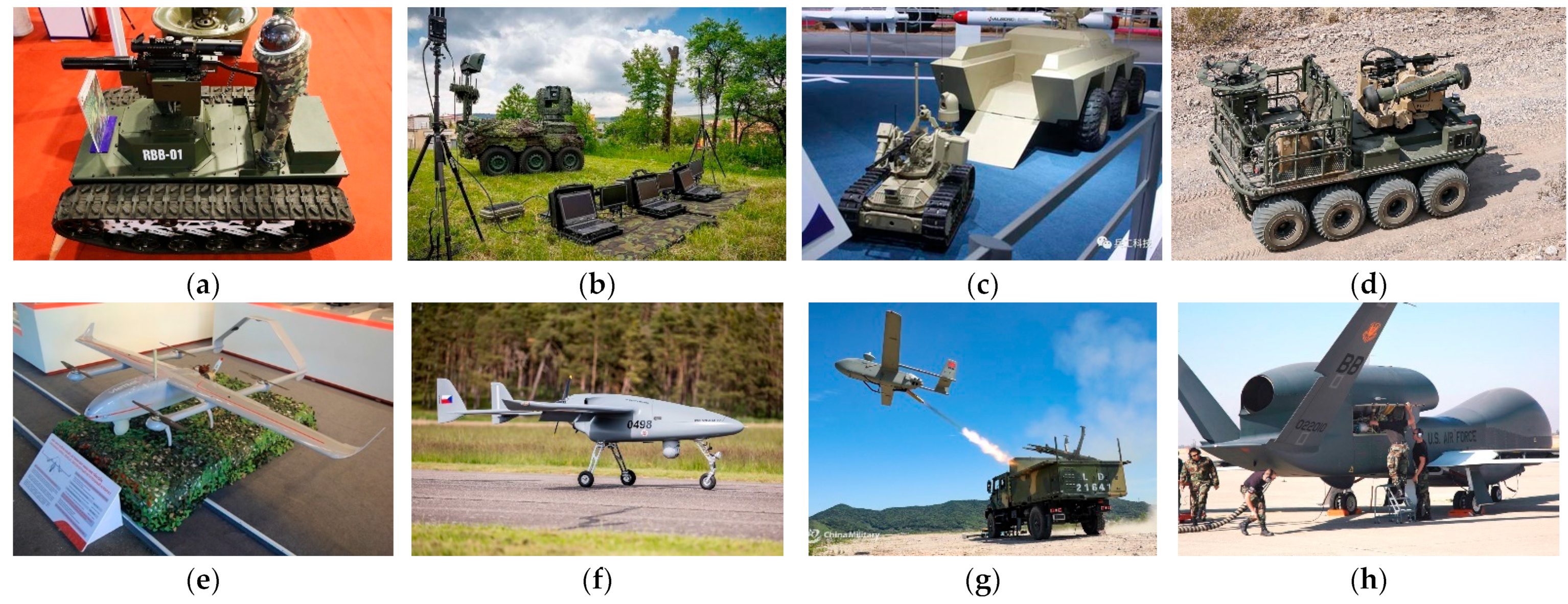
- Vehicles moving in the air: Unmanned Aerial Vehicles (Systems)—UAV, UAS;
- Vehicles moving on the ground: Unmanned Ground Vehicles—UGS;
- Vehicles moving at the sea surface: Unmanned Surface Vehicles—USV;
- Vehicles moving in the water column: Unmanned Underwater Vehicle—UUV.
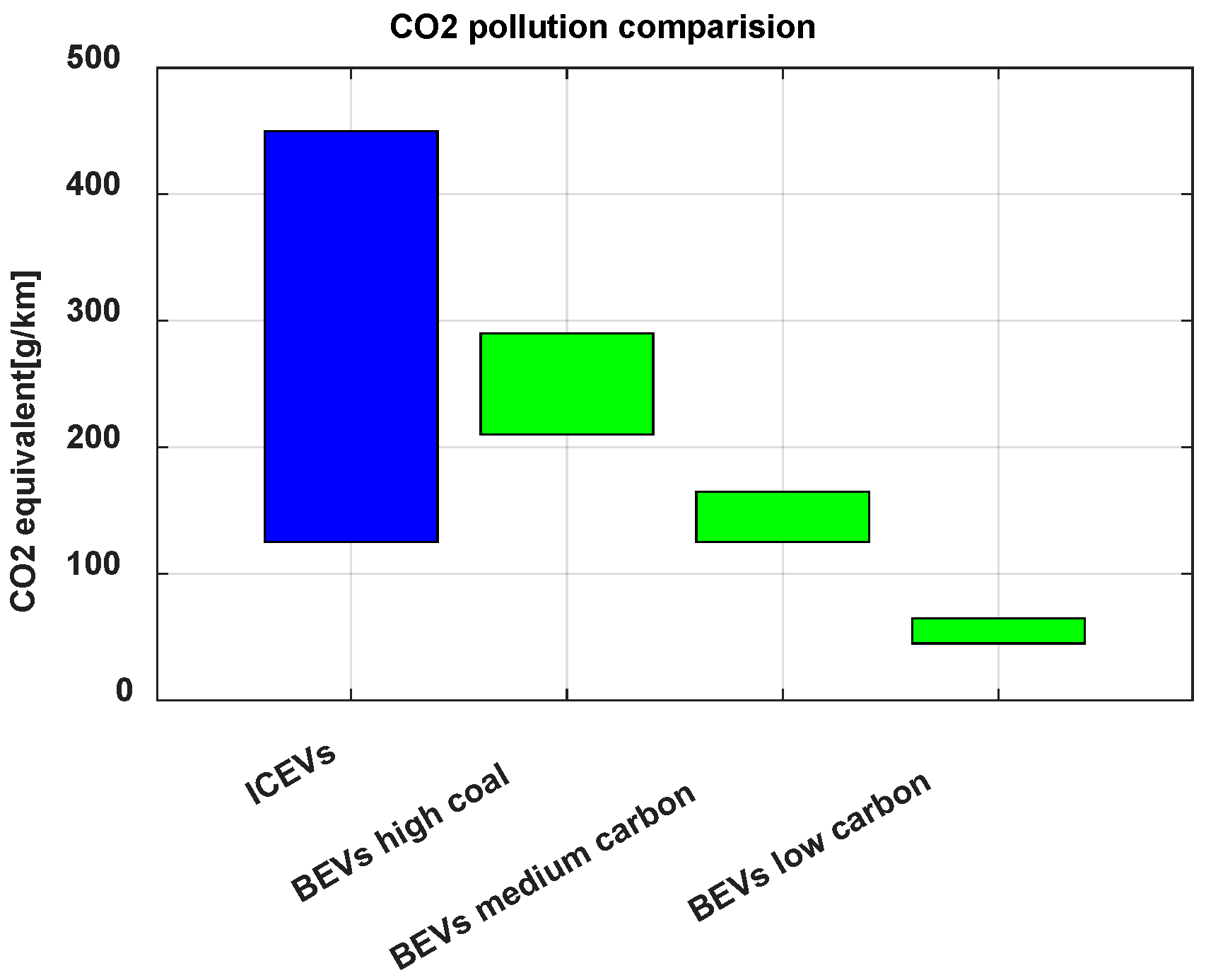
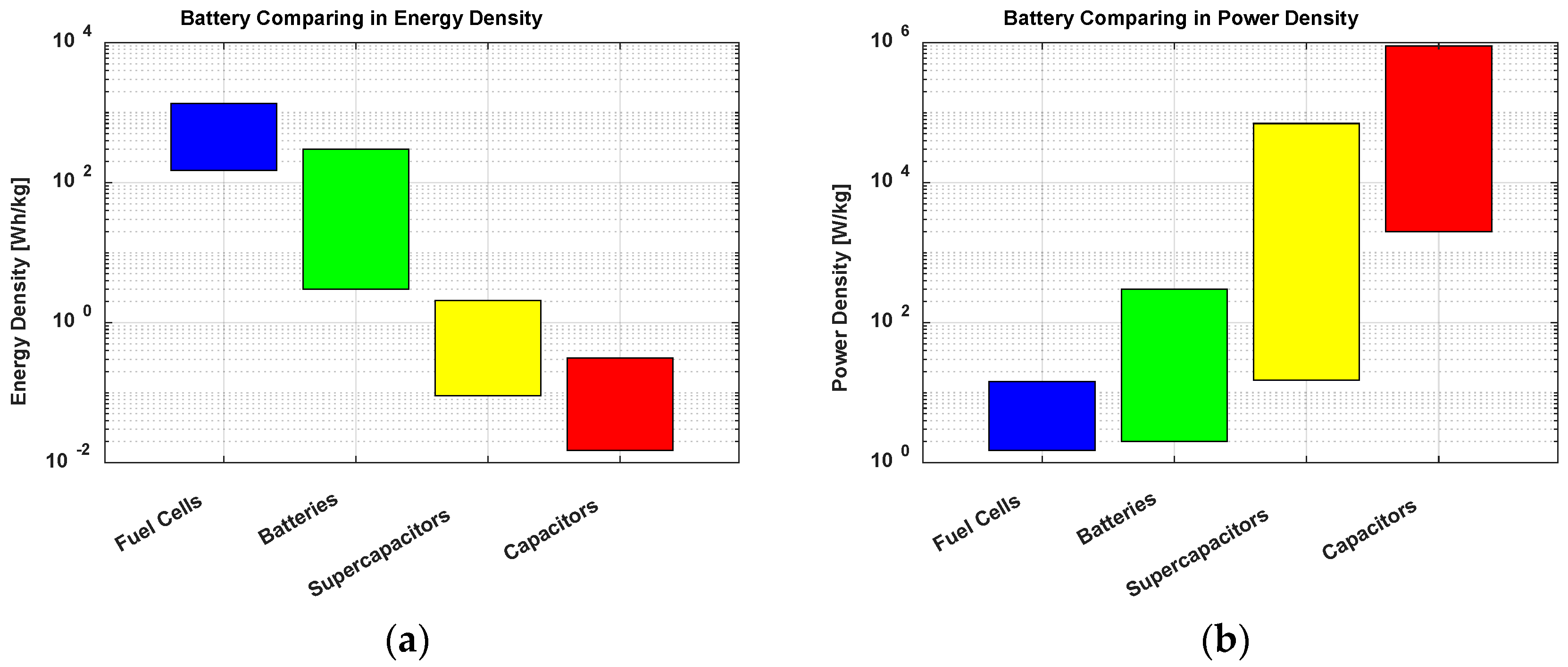
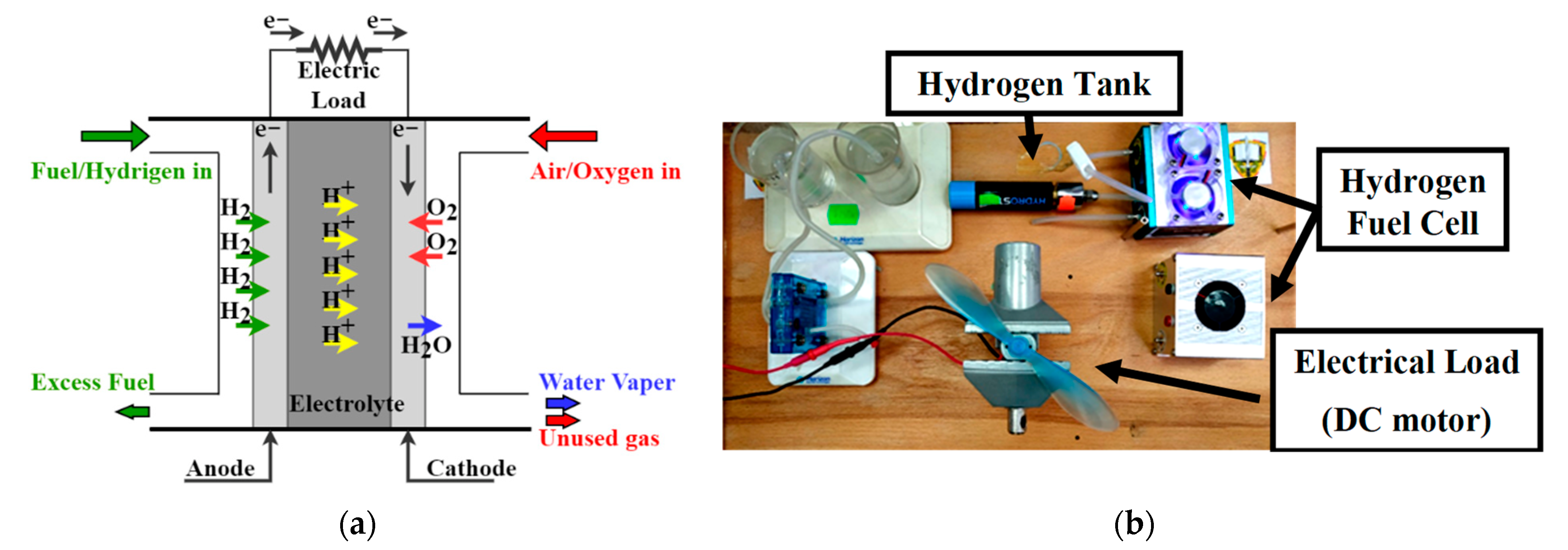
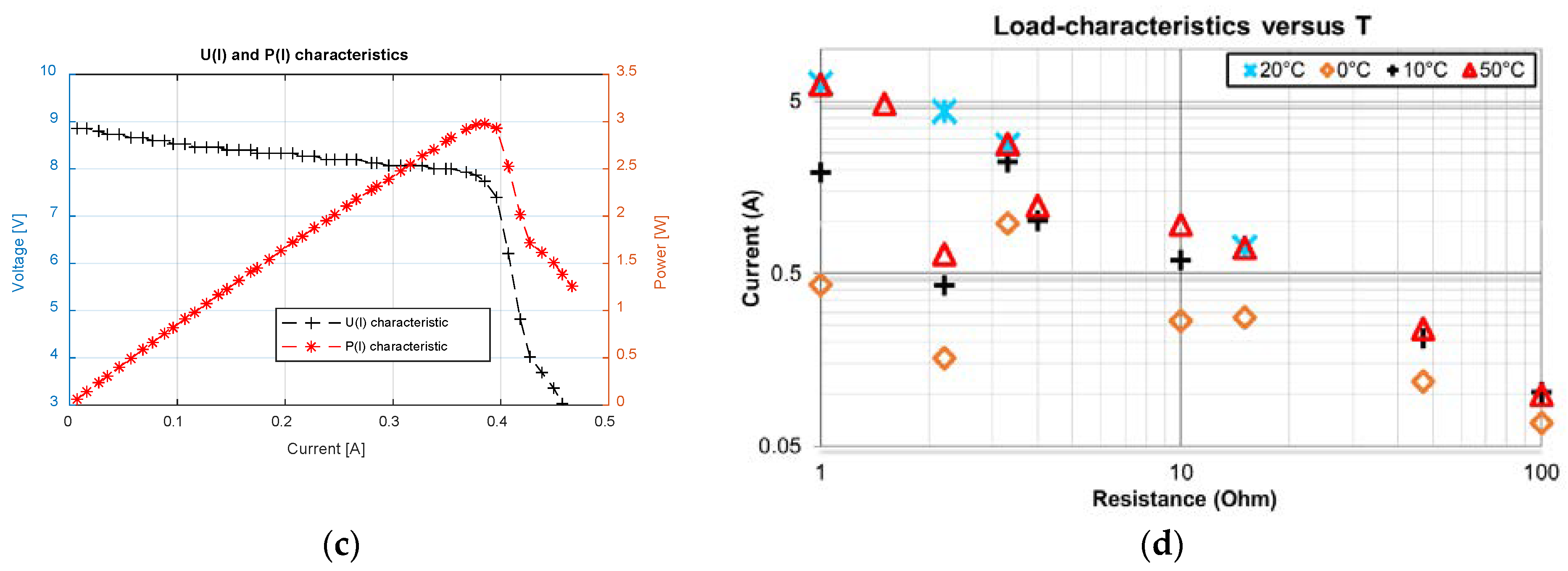
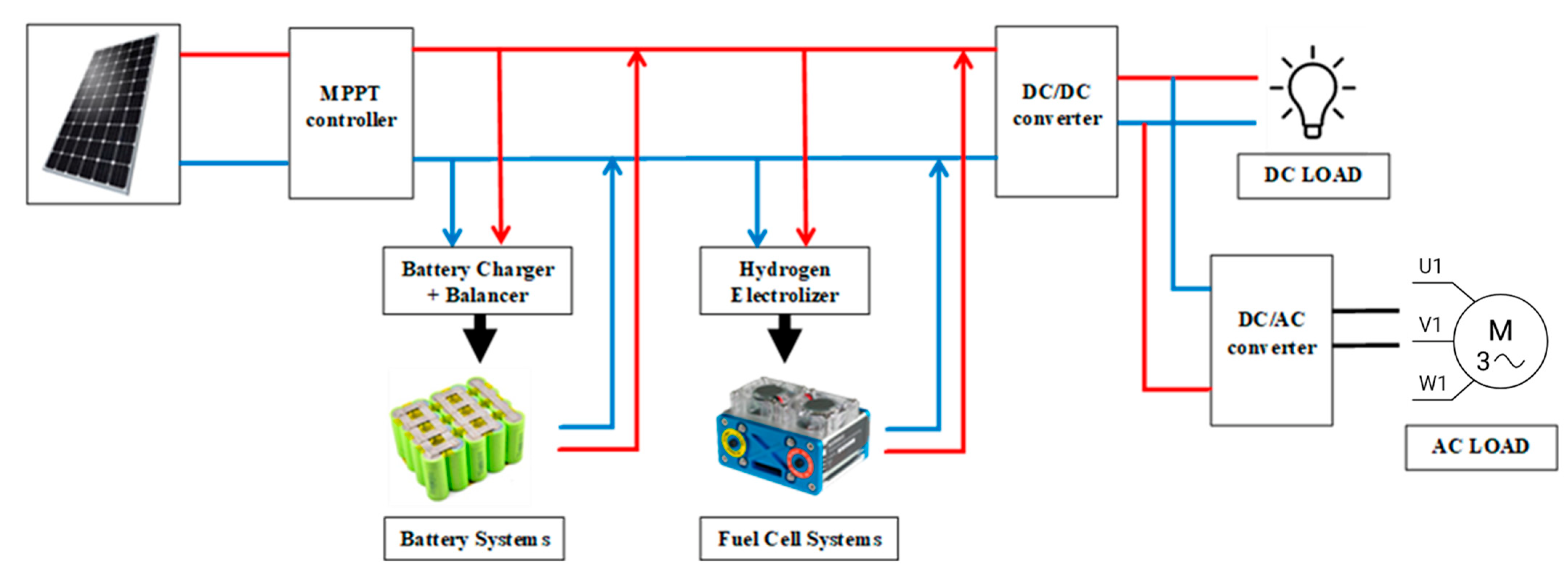
2. Electric Vehicles Power Supply
3. Design of Battery Management System
3.1. Motivations and Requirements
3.2. Theoretical Basis
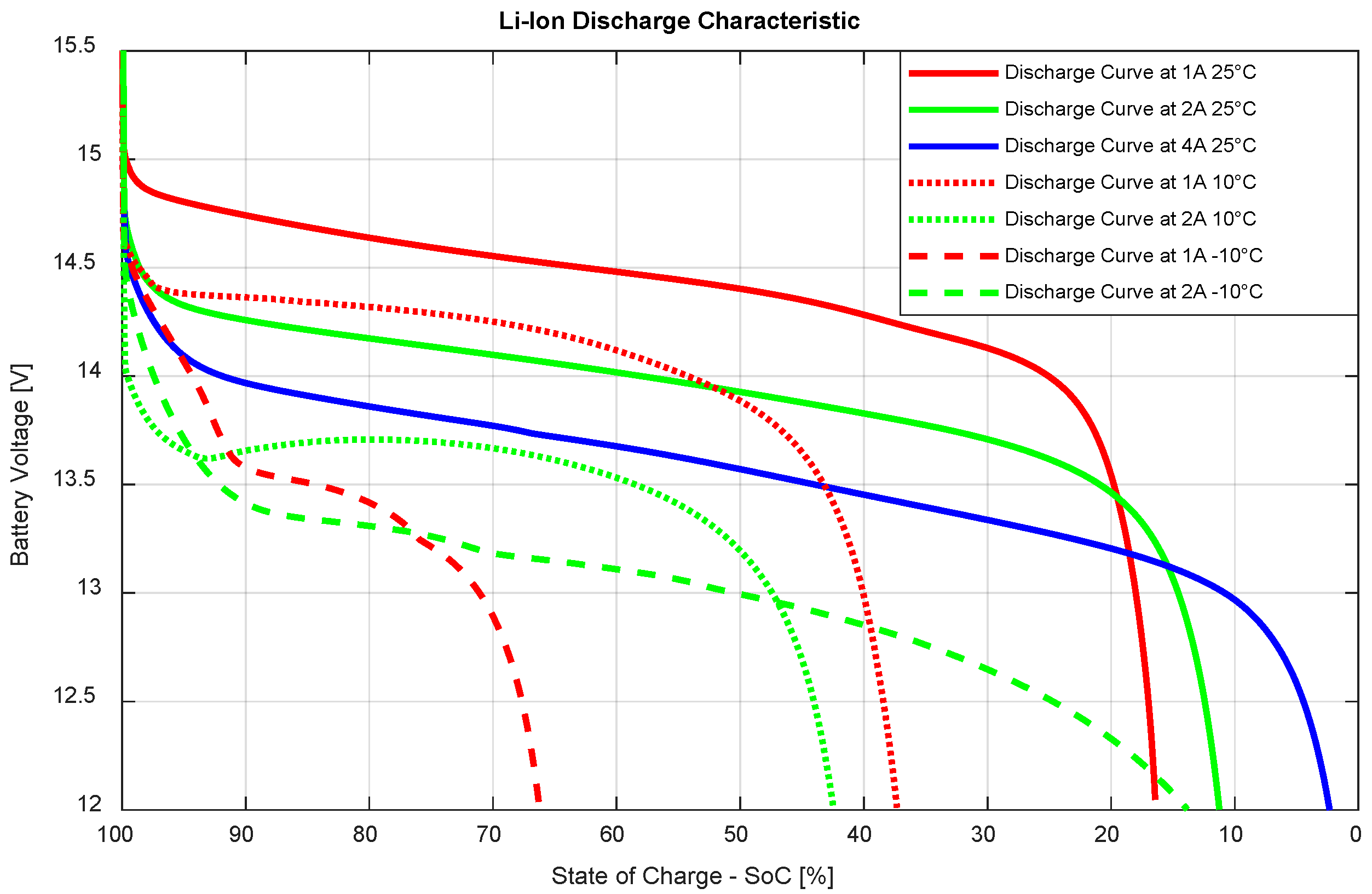
3.2.1. State of Charge Estimation
- Open Circuit Voltage (OCV) method
- Battery Internal Resistance (BIR) method
- Coulomb Counting Method (CCM) method
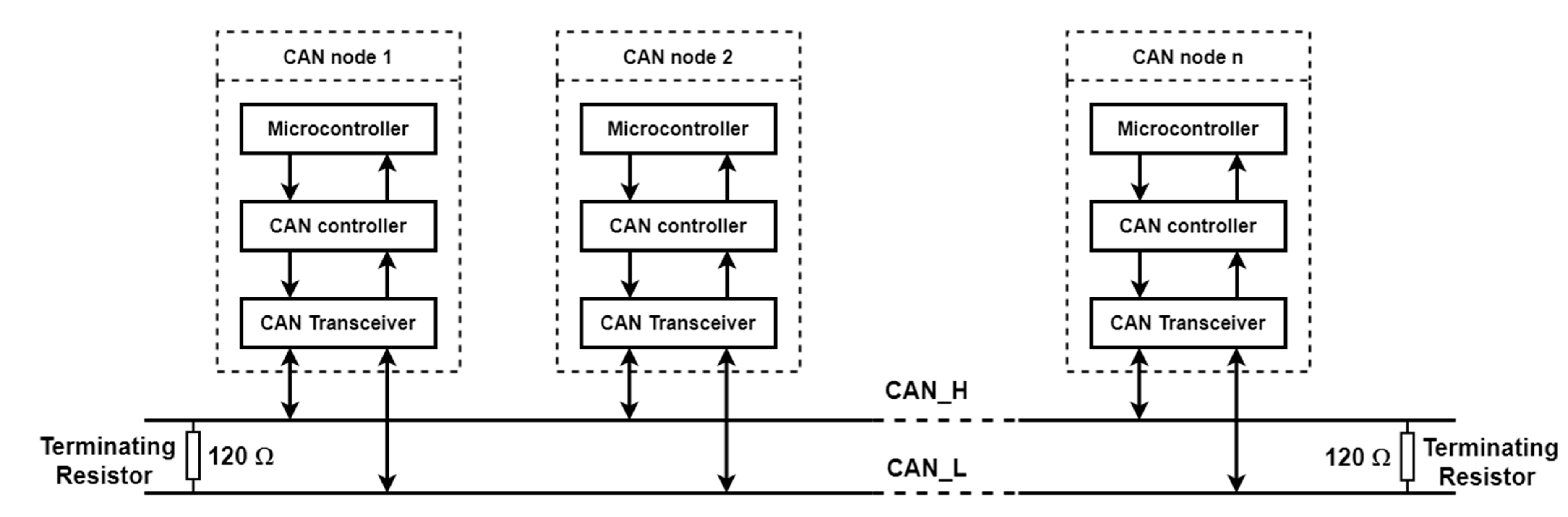
3.2.2. Controlled Area Network
3.2.3. Internet of Things
- Smart Homes and Cities
- Healthcare Monitoring
- Environment Monitoring
- Automotive Industry
- Smart Industry and Agriculture
- Energy Management
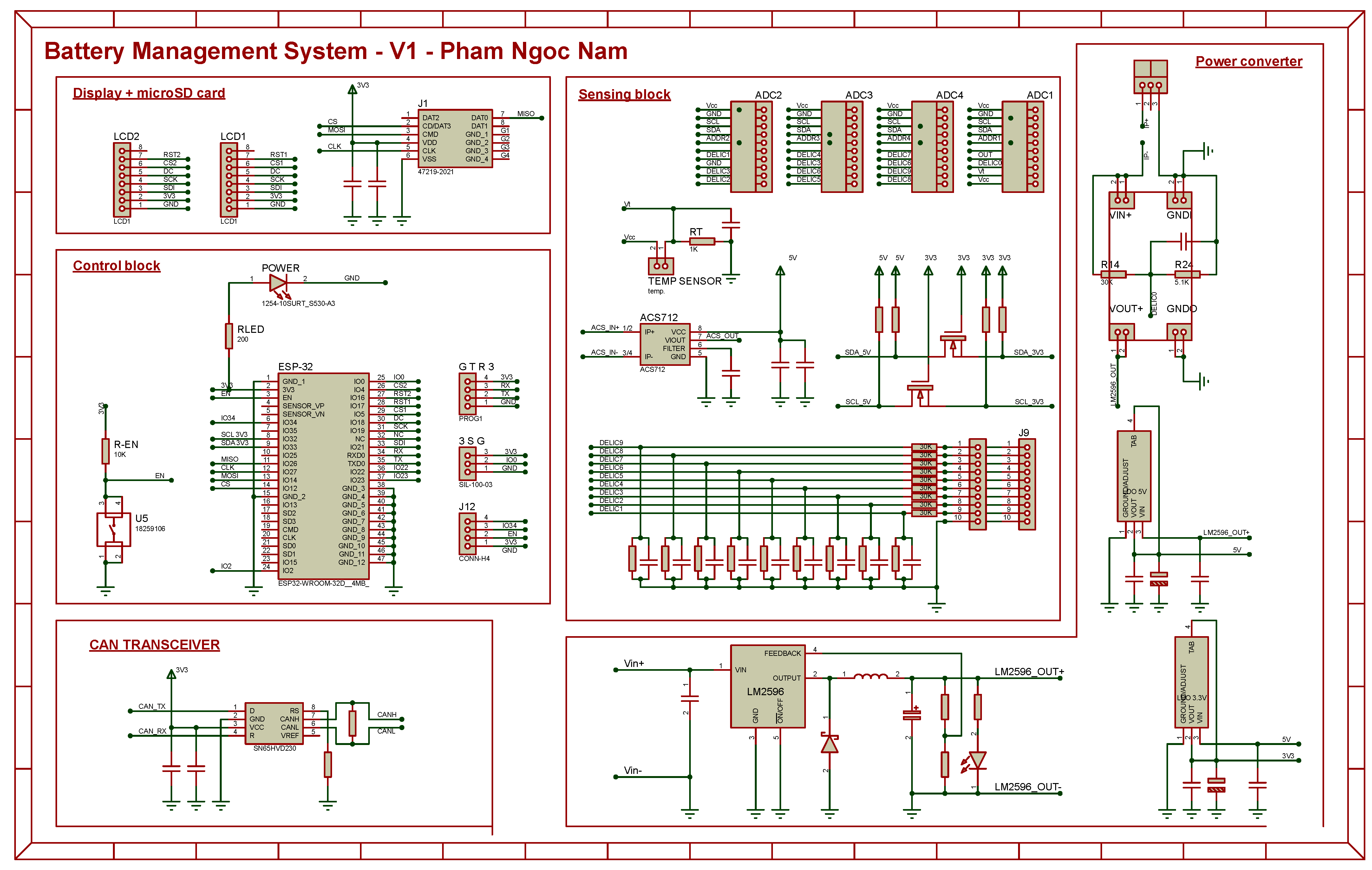
3.3. Hardware Design
- Control block—microcontroller, control the entire system to perform its missions;
- Sensing block—sensor systems, monitor operating conditions of the battery packs;
- Balancer block—electronic circuit, protect battery packs against cell imbalance;
- Power converter—DC/DC converter, power the whole system;
- Peripheries block—Auxiliary block, indicate, and display the state of system.
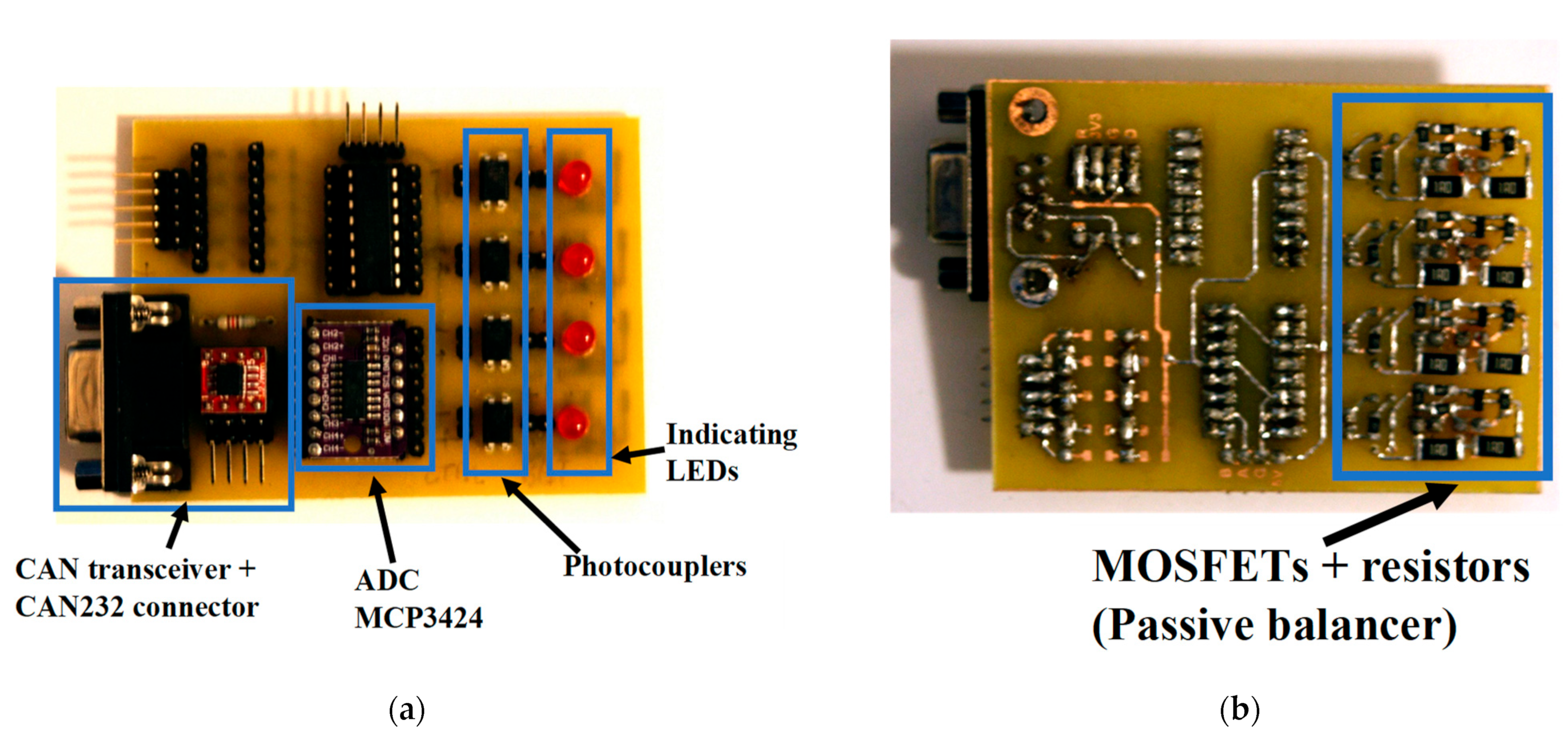
3.3.1. Control Block
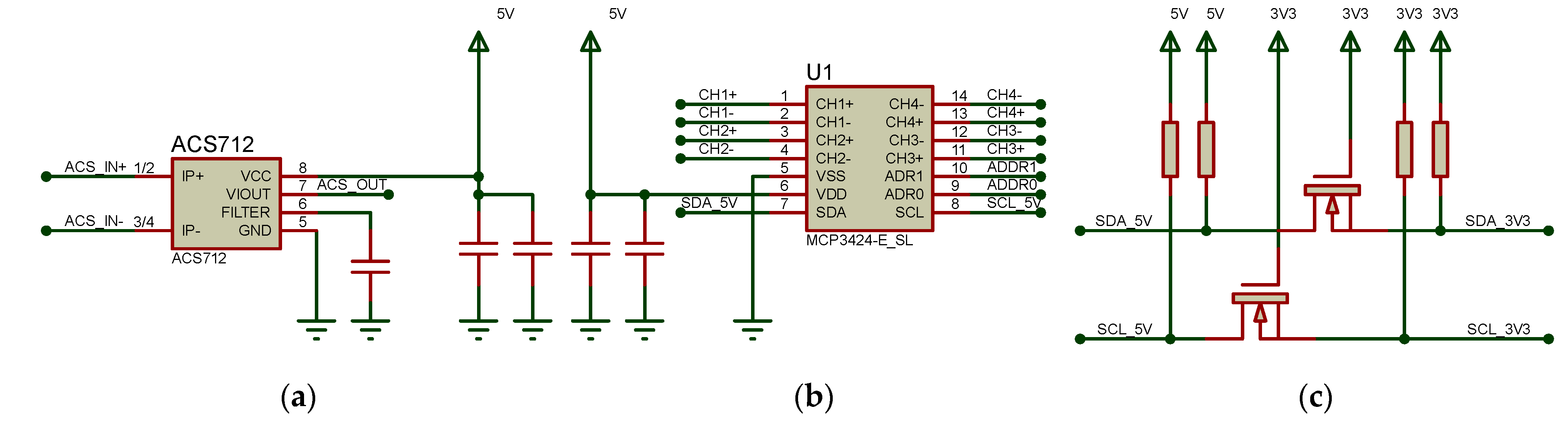
3.3.2. Sensing Block
- Thermistor with Positive Temperature Coefficient—PTC thermistor—resistance increases with rising temperature;
- Thermistor with Negative Temperature Coefficient—NTC thermistor—resistance decreases with rising temperature.
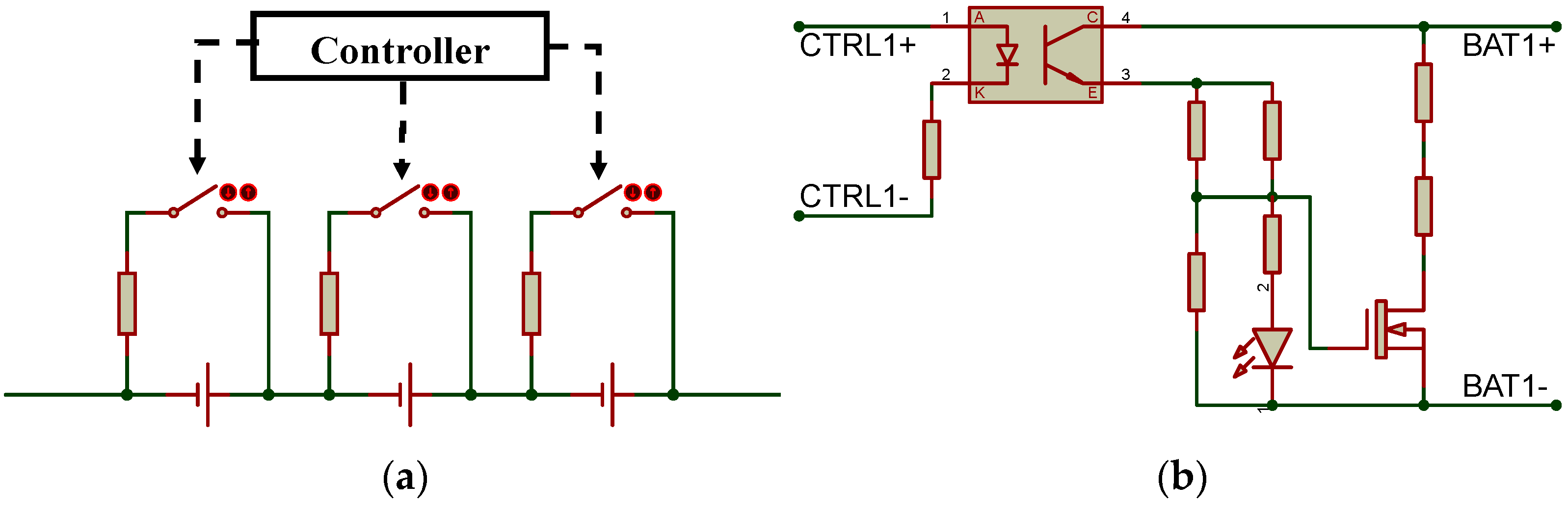
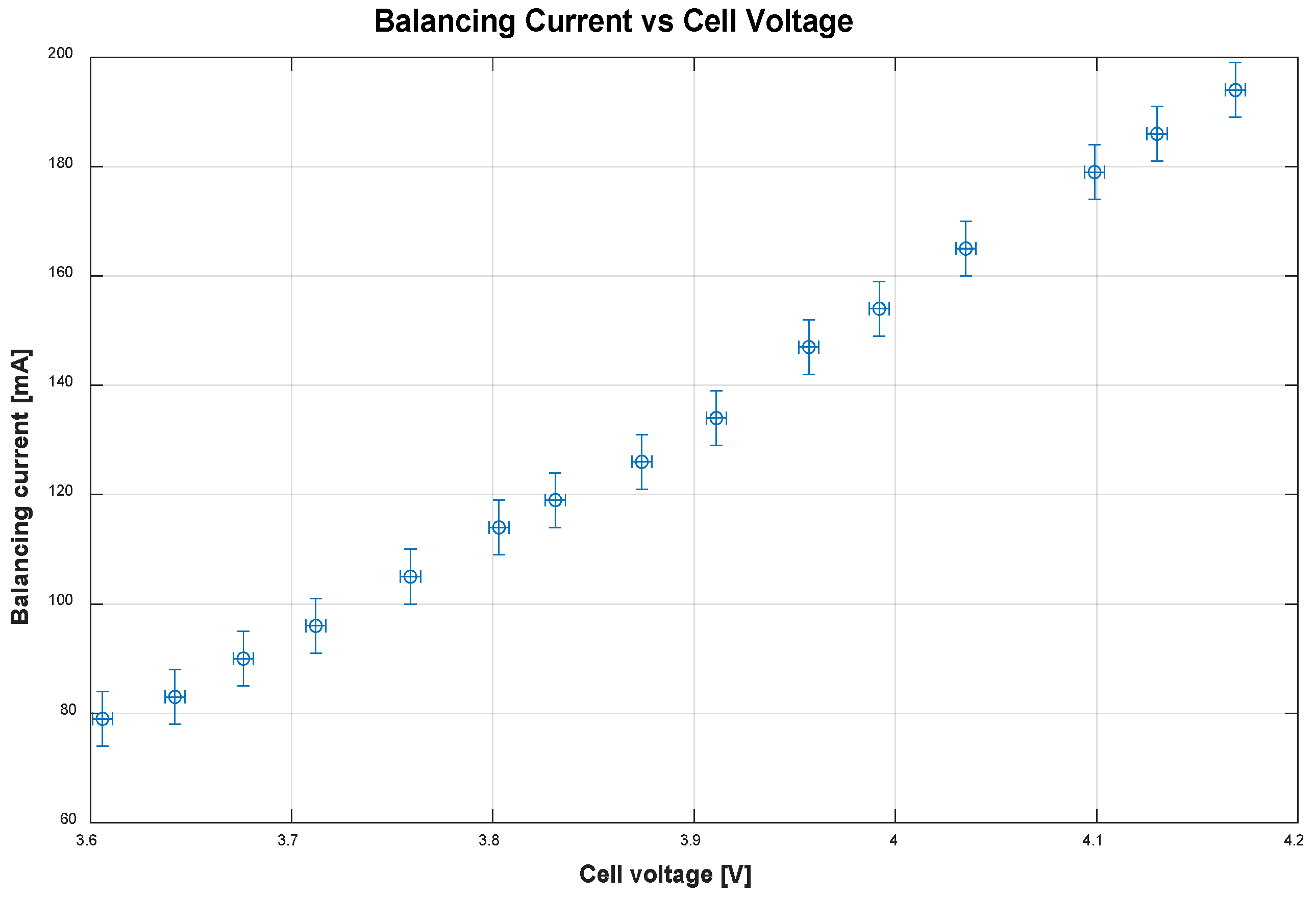
3.3.3. Balancer Block
- Passive balancer: the electric charges from a cell with higher voltage are removed through a resistor;
- Active balancer: the electric charges from a cell with higher voltage are delivered into a cell with lower voltage.
- Fixed Shunting Resistor: Each battery cell is directly connected to a similar number of resistors. This method does not require any control algorithm, but it has continuous thermal power loss and is usually used as overcharge protection in Lead-Acid and Nickel Battery [75];
- Switch Shunt Resistor: Each battery cell is connected to the Shunting resistor via a switch. The switches are controlled so that the cell with the highest voltage is connected to the resistor while other cells are disconnected from the resistor.
3.3.4. Power Electronics Converter Block
3.3.5. Peripheral Block and Master Module
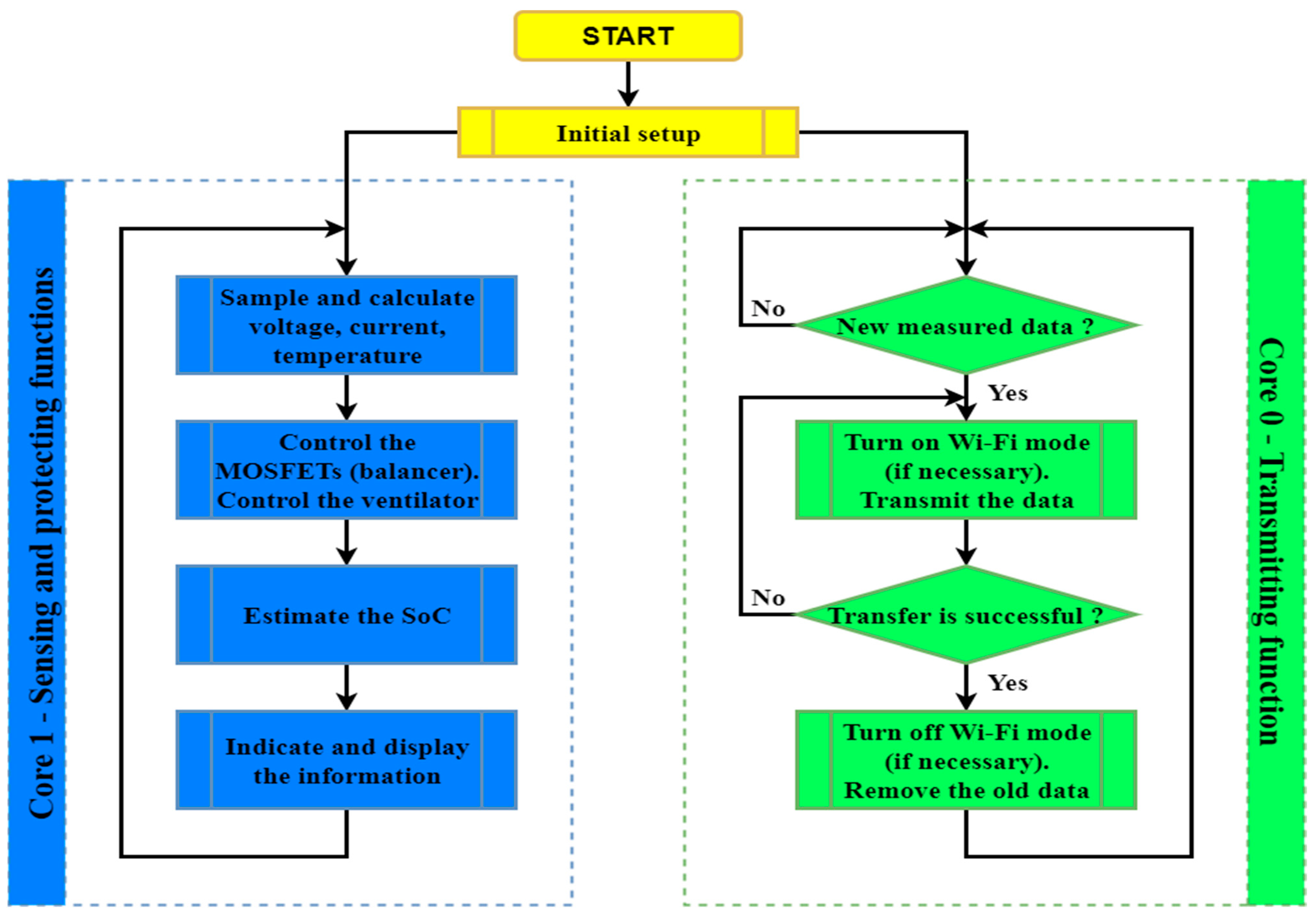
3.4. Firmware Design
- Sensing and protecting functions;
- Transmitting function.
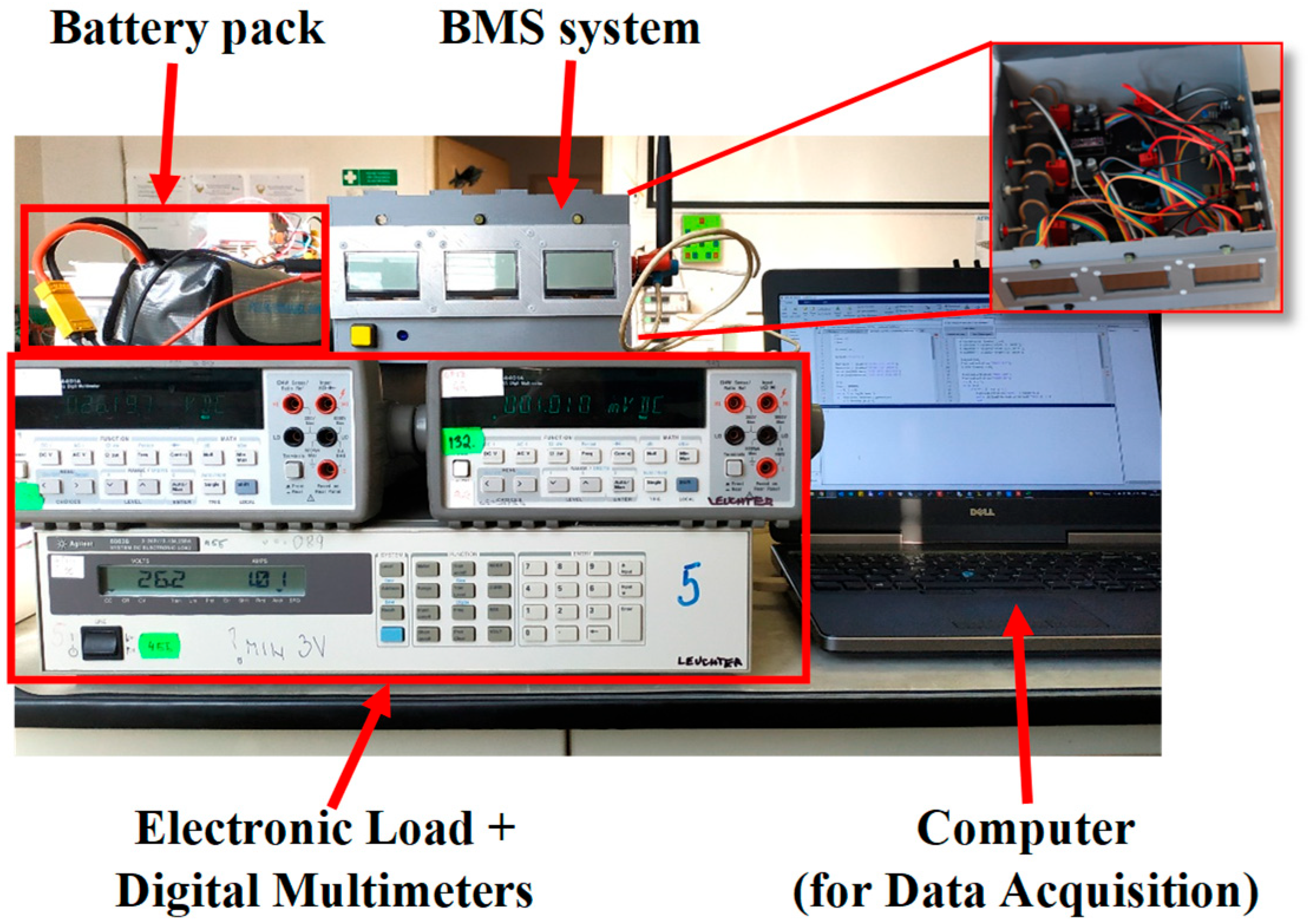
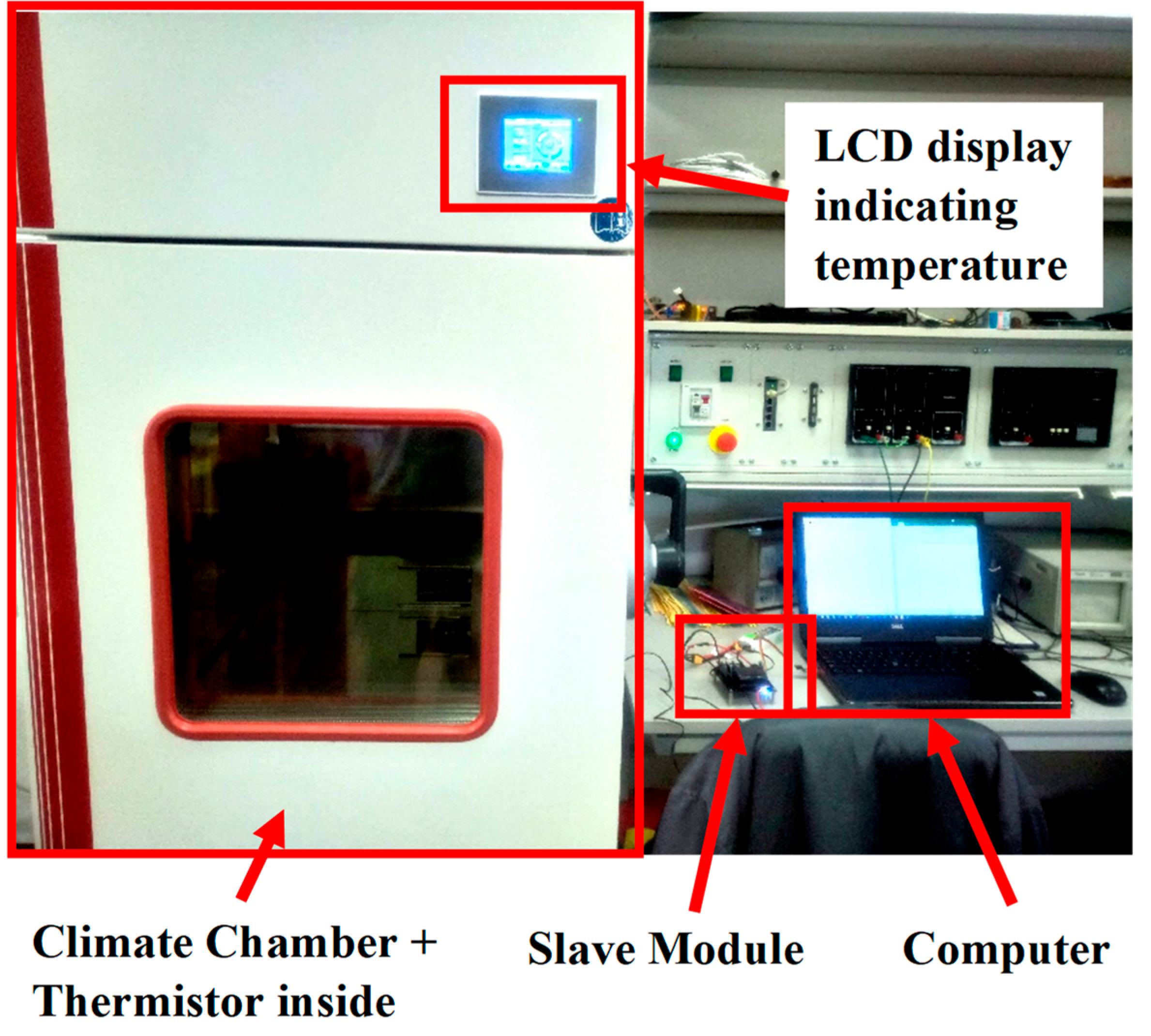
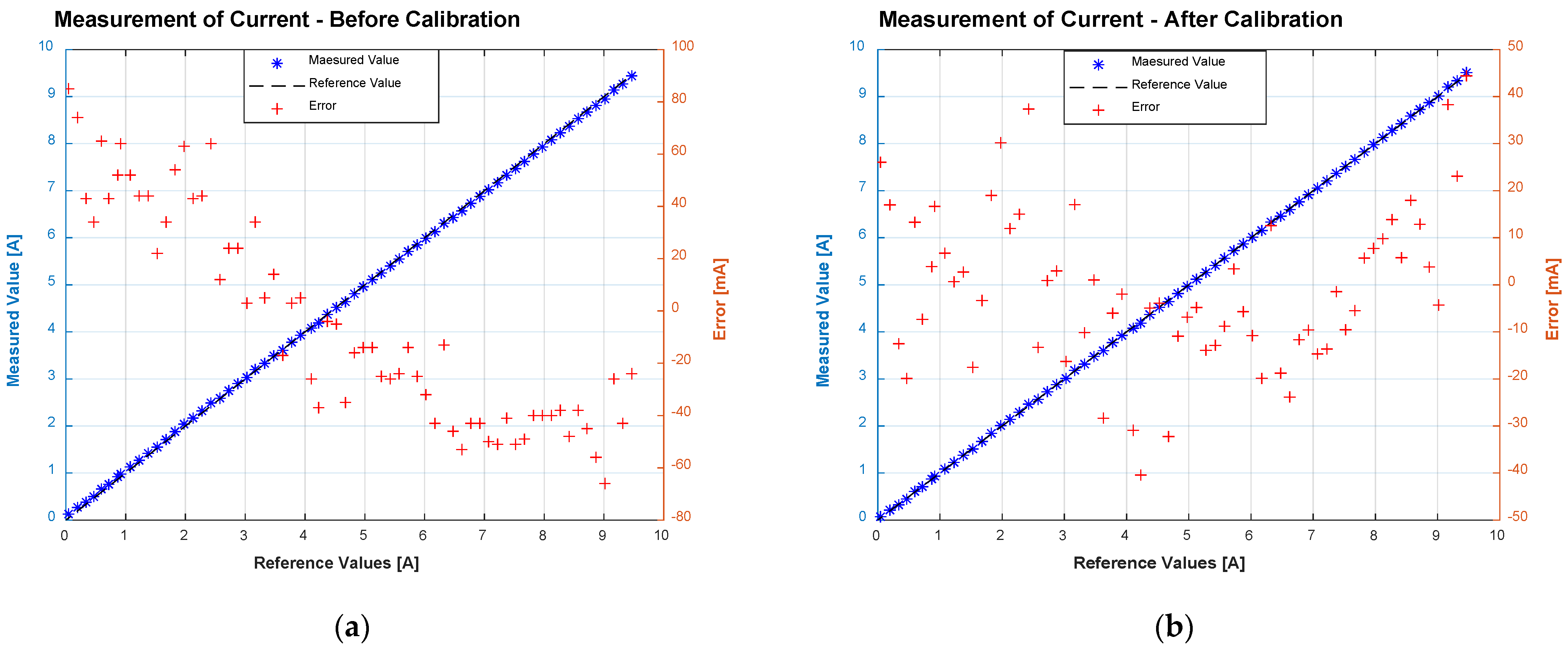
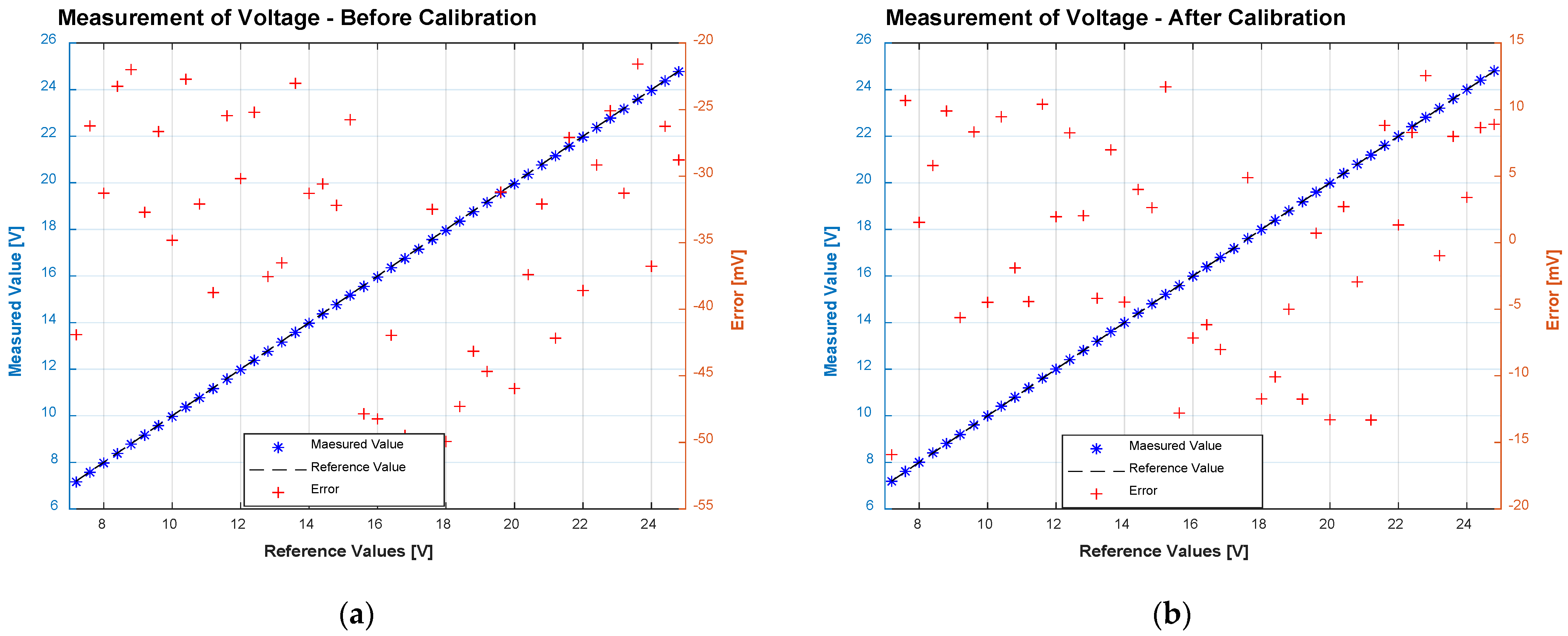
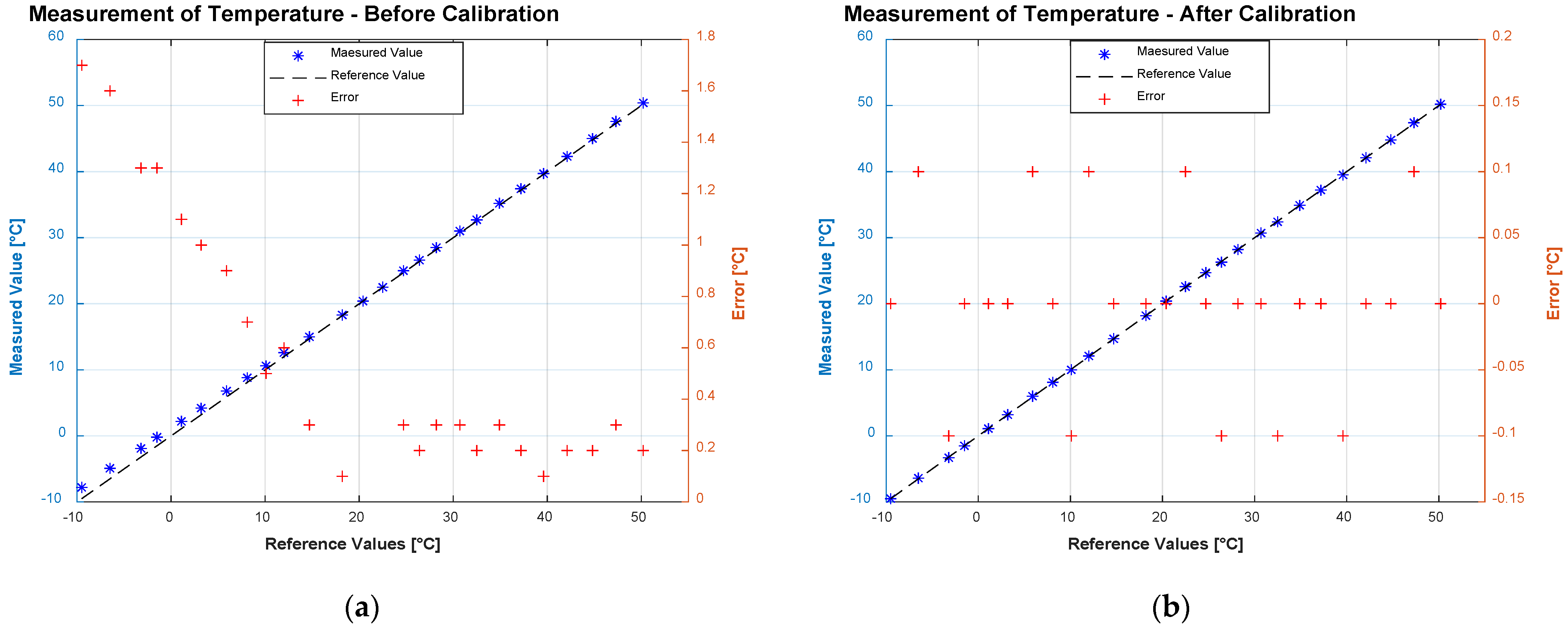
4. Verification and Discussion
- Measuring current with absolute error 50 mA
- Measuring voltage with absolute error 15 mV
- Measuring temperature with absolute error 0.1 °C
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Balestrieri, E.; Daponte, P.; de Vito, L.; Lamonaca, F. Sensors and Measurements for Unmanned Systems: An Overview. Sensors 2021, 21, 1518. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.-M. Autonomy Levels for Unmanned Systems (ALFUS) Framework Volume I: Terminology Version 1.1; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2004.
- Leuchter, J.; Zobaa, A.F. Batteries investigations of small unmanned aircraft vehicles. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016; Volume 2016. no. CP684. [Google Scholar] [CrossRef] [Green Version]
- Pham, K.L.; Leuchter, J.; Pham, N.N.; Pham, V.T. Design of Commercial-Off-The-Shelf System for Monitoring UAV’s Accumulator. In Proceedings of the 2021 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 8–11 June 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Pham, N.N.; Leuchter, J.; Pham, L.K.; Bystřický, R.; Dong, H.Q. Battery Monitoring System using Microcontroller ESP32 and Internet of Things. ECS Trans. 2021, 105, 517–529. [Google Scholar] [CrossRef]
- Modern Warfare and Unmanned Aerial Vehicles. Available online: https://www.studentsummit.cz/wp-content/uploads/2019/02/PSS-Modern-Warfare-and-Unmanned-Aerial-Vehicles-NATO.pdf (accessed on 6 April 2022).
- Denzil, O. Study on Armed Unmanned Aerial Vehicles Prepared on the Recommendation of the Advisory Board on Disarmament Matters; United Nations: New York, NY, USA, 2015. [Google Scholar]
- Melzer, N. Directorate-General for External Policies of the Union Directorate B Policy Department Study Human Rights Implications of the Usage of Drones and Unmanned Robots in Warfare; EPRS: Brussels, Belgium, 2013. [Google Scholar] [CrossRef]
- Jordan, J. The future of unmanned combat aerial vehicles: An analysis using the Three Horizons framework. Futures 2021, 134, 102848. [Google Scholar] [CrossRef]
- Unmanned Aircraft Systems. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/673940/doctrine_uk_uas_jdp_0_30_2.pdf (accessed on 6 April 2022).
- Việt Nam Trưng Bày Nhiều Vũ Khí Hiện Đại-VnExpress. Available online: https://vnexpress.net/viet-nam-trung-bay-nhieu-vu-khi-hien-dai-4030568.html (accessed on 7 April 2022).
- The Army Has Received New Unmanned Reconnaissance Assets from the VTÚ s.p.|CZDEFENCE-Czech Army and Defence Magazine. Available online: https://www.czdefence.com/article/the-army-has-received-new-unmanned-reconnaissance-assets-from-the-vtu-sp (accessed on 7 April 2022).
- Ruizhao UGVs in Service with Chinese Army Were Initially for Overseas Market. Available online: https://www.china-arms.com/ruizhao-ugv-enter-service-pla/ (accessed on 7 April 2022).
- General Dynamics MUTT-Largest NATO UGV Fielding-Armada International. Available online: https://www.armadainternational.com/2021/11/general-dynamics-mutt-largest-nato-ugv-fielding/ (accessed on 7 April 2022).
- UAV Việt Nam Giới Thiệu Tại Army Games Trên Báo Nước Ngoài. Available online: http://vn.tintuc.vn/viewID/1162121 (accessed on 7 April 2022).
- BEML’s Czech Collaborator PRIMOCO UAV Obtains European License to Operate Light Unmanned Certificate. Available online: https://frontierindia.com/bemls-czech-collaborator-primoco-uav-obtains-european-license-to-operate-light-unmanned-certificate/ (accessed on 7 April 2022).
- Artillery Troops Launch UAV for Flight Training—Global Times. Available online: https://www.globaltimes.cn/page/202106/1225203.shtml (accessed on 7 April 2022).
- Air Force Opens the Door to All Enlisted to Fly Drones. Available online: https://www.airforcetimes.com/news/your-air-force/2016/08/29/air-force-opens-the-door-to-all-enlisted-to-fly-drones/ (accessed on 7 April 2022).
- Lt Cdr Dave Ehredt. UAS Yearbook-UAS: The Global Perspective-8th Edition. 2010. Available online: www.japcc.de (accessed on 6 April 2022).
- Sensitivity Study of a Small Maritime Rotary UAS Operating in a Turbulent Airwake. Available online: https://www.researchgate.net/publication/283228351_Sensitivity_study_of_a_small_maritime_rotary_UAS_operating_in_a_turbulent_airwake (accessed on 6 April 2022).
- Zhu, T.; Boyles, S.D.; Unnikrishnan, A. Electric Vehicle Travelling Salesman Problem with Drone. Available online: https://par.nsf.gov/servlets/purl/10185815 (accessed on 6 April 2022).
- Denton, T. Automobile Electrical and Electronic Systems, 3rd ed; Routledge: London, UK, 2017. [Google Scholar]
- Leuchter, J.; Bauer, P. Capacity of Power-Batteries versus Temperature. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications, EPE-ECCE Europe 2015, Geneva, Switzerland, 8–10 October 2015. [Google Scholar] [CrossRef]
- Helmers, E.; Weiss, M. Advances and critical aspects in the life-cycle assessment of battery electric cars. Energy Emiss. Control Technol. 2017, 5, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Fuel Cells and Other Emerging Manportable Power Technologies for the NATO Warfighter-Part I: Power Sources for Manportable/ Manwearable Applications This is the Final Report of SET-173 ‘Fuel Cells and Other Emerging Manportable Power Technologies for the NATO Warfighter’ on the Use of Fuel Cells in Manwearable and Manportable Applications. Distribution and Availability on Back Cover 2014. Available online: www.sto.nato.int (accessed on 11 April 2022).
- Reddy, T.B. Linden’s Handbook of Batteries; McGraw-Hill Education: New York, NY, USA, 2011. [Google Scholar]
- Fuel Cell 3-D Modelling Using a Logarithmic Approximation in MATLAB® &Simulink®|Advances in Military Technology. Available online: https://aimt.cz/index.php/aimt/article/view/1103 (accessed on 17 May 2022).
- Bajpai, P.; Dash, V. Hybrid Renewable Energy Systems for Power Generation in Stand-Alone Applications: A Review. Renew. Sustain. Energy Rev. 2012, 16, 2926–2939. [Google Scholar] [CrossRef]
- Sumathi, S.; Kumar, L.A.; Surekha, P. Solar PV and Wind Energy Conversion Systems; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Hybrid Power Systems with Renewable Energy Sources—Types, Structures, Trends for Research and Development. Available online: https://www.researchgate.net/publication/236012467_Hybrid_Power_Systems_with_Renewable_Energy_Sources_-_Types_Structures_Trends_for_Research_and_Development (accessed on 31 May 2022).
- Mai, T.N.; Shcherbakov, M.; Vinh, T.Q.; Shcherbakova, N.; Kamaev, V. CCIS 535—Hybrid Renewable Energy Systems Control Based on Predictive Models and Genetic Algorithms. Commun. Comput. Inf. Sci. 2015, 535, 515–527. [Google Scholar] [CrossRef]
- Lau, D.; Song, N.; Hall, C.; Jiang, Y.; Lim, S.; Perez-Wurfl, I.; Ouyang, Z.; Lennon, A. Hybrid solar energy harvesting and storage devices: The promises and challenges. Mater. Today Energy 2019, 13, 22–44. [Google Scholar] [CrossRef]
- Leuchter, J.; Bauer, P.; Řeřucha, V.; Bojda, P. DC-DC converters with FPGA control for photovoltaic system. In Proceedings of the 2008 13th International Power Electronics and Motion Control Conference, EPE-PEMC 2008, Poznań, Poland, 1–3 September 2008; pp. 422–427. [Google Scholar] [CrossRef]
- Castellanos, J.G.; Walker, M.; Poggio, D.; Pourkashanian, M.; Nimmo, W. Modelling an off-grid integrated renewable energy system for rural electrification in India using photovoltaics and anaerobic digestion. Renew. Energy 2015, 74, 390–398. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharyya, S.C. From SHS to Mini-Grid-Based Off-Grid Electrification: A Case Study of Bangladesh. Green Energy Technol. 2014, 233–282. [Google Scholar] [CrossRef]
- Shaahid, S.M.; Elhadidy, M.A. Technical and economic assessment of grid-independent hybrid photovoltaic–diesel–battery power systems for commercial loads in desert environments. Renew. Sustain. Energy Rev. 2007, 11, 1794–1810. [Google Scholar] [CrossRef]
- Kim, H.; Jung, T.Y. Independent solar photovoltaic with Energy Storage Systems (ESS) for rural electrification in Myanmar. Renew. Sustain. Energy Rev. 2018, 82, 1187–1194. [Google Scholar] [CrossRef]
- Huy, D.Q.; Leuchter, J.; Buzek, J.; Stekly, V.; Bang, L.T. Design and implementation control of interfering mobile device with stepper motor and microcontroller ATmega 16. In Proceedings of the ICMT 2017—6th International Conference on Military Technologies, Brno, Czech Republic, 31 May–2 June 2017; pp. 666–670. [Google Scholar] [CrossRef]
- Huy, D.Q.; Zubík, K.; Steklý, V.; Leuchter, J. Optimization of the interfering device for use of interference communication UAV. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar] [CrossRef]
- Leuchter, J.; Quang, H.D. Design of interfering mobile device in the band Wi-Fi with magnetron. Adv. Electr. Electron. Eng. 2018, 16, 489–500. [Google Scholar] [CrossRef]
- Pham, K.L.; Leuchter, J.; Bystricky, R.; Pham, V.T.; Pham, N.N. Design and Simulation System for Quadrotor UAVs. In Proceedings of the 2021 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 8–11 June 2021. [Google Scholar] [CrossRef]
- Pham, K.L.; Rozehnal, D.; Leuchter, J.; Pham, N.N.; Bystricky, R.; Blasch, E. Test Bench for Regenerative Braking UAVs to Maximize Efficiency. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021. [Google Scholar] [CrossRef]
- Chen, Y.; Kang, Y.; Zhao, Y.; Wang, L.; Liu, J.; Li, Y.; Liang, Z.; He, X.; Li, X.; Tavajohi, N.; et al. A review of lithium-ion battery safety concerns: The issues, strategies, and testing standards. J. Energy Chem. 2021, 59, 83–99. [Google Scholar] [CrossRef]
- Wen, J.; Yu, Y.; Chen, C. A Review on Lithium-Ion Batteries Safety Issues: Existing Problems and Possible Solutions. Mater. Express 2022, 43, 32. [Google Scholar] [CrossRef]
- Sripad, S.; Bills, A.; Viswanathan, V. A review of safety considerations for batteries in aircraft with electric propulsion. MRS Bull. 2021, 46, 435. [Google Scholar] [CrossRef]
- Arora, S.; Abkenar, A.T.; Jayasinghe, S.G.; Tammi, K. Battery Management System: Charge Balancing and Temperature Control. In Heavy-Duty Electric Vehicles; Elsevier: Amsterdam, The Netherlands, 2021; pp. 173–203. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, H.; Ely, T.O.; Ely, O.T.; Kamzabek, D.; Chakraborty, D. Batteries Safety: Recent Progress and Current Challenges. Front. Energy Res. 2019, 7, 71. [Google Scholar] [CrossRef]
- Lamb, J.; Jeevarajan, J.A. New developments in battery safety for large-scale systems. MRS Bull. 2021, 46, 395. [Google Scholar] [CrossRef]
- Valis, D.; Hasilova, K.; Leuchter, J. Modelling of influence of various operational conditions on Li-ion battery capability. In Proceedings of the IEEE International Conference on Industrial Engineering and Engineering Management, Bali, Indonesia, 4–7 December 2016; pp. 536–540. [Google Scholar] [CrossRef]
- Erd, A.; Stokłosa, J. Main design guidelines for battery management systems for traction purposes. In Proceedings of the 11th International Science and Technical Conference Automotive Safety, Žastá, Slovakia, 18–20 April 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, X.; Tang, S.; Yu, C.; Xie, J.; Han, X.; Ouyang, M. Remaining Useful Life Prediction of Lithium-ion Batteries Based on Wiener Process Under Time-Varying Temperature Condition. Reliab. Eng. Syst. Saf. 2021, 214, 107675. [Google Scholar] [CrossRef]
- Ma, T.; Wu, S.; Wang, F.; Lacap, J.; Lin, C.; Liu, S.; Wei, M.; Hao, W.; Wang, Y.; Park, J.W. Degradation Mechanism Study and Safety Hazard Analysis of Overdischarge on Commercialized Lithium-ion Batteries. ACS Appl. Mater. Interfaces 2020, 12, 56086–56094. [Google Scholar] [CrossRef] [PubMed]
- Juarez-Robles, D.; Vyas, A.A.; Fear, C.; Jeevarajan, J.A.; Mukherjee, P.P. Overdischarge and Aging Analytics of Li-Ion Cells. J. Electrochem. Soc. 2020, 167, 090558. [Google Scholar] [CrossRef]
- National Transportation Safety Board. 2013. Available online: http://www.ntsb.gov/investigations/dms.html (accessed on 12 April 2022).
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery Management System Hardware Concepts: An Overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Gabbar, H.A.; Othman, A.M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Aiello, O. Electromagnetic Susceptibility of Battery Management Systems’ ICs for Electric Vehicles: Experimental Study. Electronics 2020, 9, 510. [Google Scholar] [CrossRef] [Green Version]
- Luo, X.; Kang, L.; Lu, C.; Linghu, J.; Lin, H.; Hu, B. An Enhanced Multicell-to-Multicell Battery Equalizer Based on Bipolar-Resonant LC Converter. Electronics 2021, 10, 293. [Google Scholar] [CrossRef]
- BU-402: What Is C-Rate?—Battery University. Available online: https://batteryuniversity.com/article/bu-402-what-is-c-rate (accessed on 31 May 2022).
- Battery Charging and Discharging Parameters|PVEducation. Available online: https://www.pveducation.org/pvcdrom/battery-characteristics/battery-charging-and-discharging-parameters (accessed on 31 May 2022).
- Lain, M.J.; Kendrick, E. Understanding the limitations of lithium ion batteries at high rates. J. Power Sources 2021, 493, 229690. [Google Scholar] [CrossRef]
- Salunkhe, A.A.; Kamble, P.P.; Jadhav, R. Design and implementation of CAN bus protocol for monitoring vehicle parameters. In Proceedings of the 2016 IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 20–21 May 2016; pp. 301–304. [Google Scholar] [CrossRef]
- Robert Bosch GmbH. Bosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid Drive; Springer: Berlin/Heidelberg, Germany, 2014; p. 521. [Google Scholar]
- Kubiš, M.; Beňo, P. Realization of communication via the CAN bus. Transp. Res. Procedia 2019, 40, 332–337. [Google Scholar] [CrossRef]
- Chen, D.; Wang, S.; Zheng, Y. An ARM-based Environment for Combine Harvester Process Monitor via CAN Bus. Phys. Procedia 2011, 22, 258–262. [Google Scholar] [CrossRef] [Green Version]
- Long, J. Automobile Electronic Control Network Design Based on CAN Bus. In Proceedings of the 2018 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Xiamen, China, 25–26 January 2018; pp. 9–12. [Google Scholar] [CrossRef]
- Singh, P. Internet of things based health monitoring system: Opportunities and challenges study and design of routing protocols for health monitoring through vehicular Ad-hoc network view project. Int. J. Adv. Res. Comput. Sci. 2018, 9, 224–228. [Google Scholar] [CrossRef] [Green Version]
- Casola, V.; de Benedictis, A.; Riccio, A.; Rivera, D.; Mallouli, W.; de Oca, E.M. A security monitoring system for internet of things. Internet Things 2019, 7, 100080. [Google Scholar] [CrossRef]
- Piyare, R. Internet of Things: Ubiquitous Home Control and Monitoring System using Android based Smart Phone. Int. J. Internet Things 2013, 2013, 5–11. [Google Scholar] [CrossRef]
- Ziegler, S.; Woodward, R.C.; Iu, H.H.C.; Borle, L.J. Current sensing techniques: A review. IEEE Sens. J. 2009, 9, 354–376. [Google Scholar] [CrossRef]
- Daowd, M.; Omar, N.; van den Bossche, P.; van Mierlo, J. Passive and active battery balancing comparison based on MATLAB simulation. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, VPPC 2011, Chicago, IL, USA, 6–9 September 2011. [Google Scholar] [CrossRef]
- Daowd, M.; Antoine, M.; Omar, N.; Lataire, P.; van den Bossche, P.; van Mierlo, J. Battery Management System—Balancing Modularization Based on a Single Switched Capacitor and Bi-Directional DC/DC Converter with the Auxiliary Battery. Energies 2014, 7, 2897–2937. [Google Scholar] [CrossRef] [Green Version]
- Bentley, W.F. Cell balancing considerations for lithium-ion battery systems. In Proceedings of the Annual Battery Conference on Applications and Advances, Long Beach, CA, USA, 14–17 January 1997; pp. 223–226. [Google Scholar] [CrossRef]
- Khanal, A.; Timilsina, A.; Paudyal, B.; Ghimire, S. Comparative Analysis of Cell Balancing Topologies in Battery Management Systems. In Proceedings of the IOEGC 2019-Summer, Lalitpur, Nepal, 23 May 2019. [Google Scholar]
- The Chip Shortage: Current Challenges, Predictions, and Potential Solutions|FS Community. Available online: https://community.fs.com/blog/the-chip-shortage-current-challenges-predictions-and-potential-solutions.html (accessed on 17 May 2022).
- Ko, Y.; Choi, W. A New SOC Estimation for LFP Batteries: Application in a 10 Ah Cell (HW 38120 L/S) as a Hysteresis Case Study. Electronics 2021, 10, 705. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Category | Weight | Altitude | Normal Mission Radius | Example Platforms 1 |
|---|---|---|---|---|---|
| CLASS I | Micro | <2 kg | 200 ft | 5 km (LOS 4) | Black Widow |
| Mini | 2–20 kg | 3000 ft AGL 3 | 25 km (LOS) | Desert Hawk III ScanEagle | |
| Small | 20–150 kg | 5000 ft AGL | 50 km (LOS) | Hermes 90 Luna X-2000 | |
| CLASS II | Tactical | 150–600 kg | 10,000 ft AGL | 200 km (LOS) | Hermes 450 Watchkeeper WK450 |
| CLASS III | MALE 1 | >600 kg | 45,000 ft AGL | Unlimited (BLOS 5) | Hermes 900 MQ-9 Reaper |
| HALE 2 | 65,000 ft AGL | RQ-4 Global Hawk | |||
| Strike/Combat | 65,000 ft AGL |
| Type | Voltage per Cell [V] | Energy Density [Wh/kg] | Energy Density [Wh/L] | Self-Discharge [%/Month] | Life Cycles |
|---|---|---|---|---|---|
| Lead—Acid | 1.80–2.10 | 30–40 | 60–75 | 4–8 | 500–700 |
| Nickel—Iron | 0.85–1.35 | 50 | - | 20–40 | 500–1000 |
| Nickel—Cadmium | 0.85–1.35 | 40–60 | 50–150 | 10–15 | 500–1500 |
| Nickel—Metal Hydride | 0.85–1.35 | 30–80 | 140–300 | 15–30 | 500–1000 |
| Lithium-Ion | 3.00–4.20 | >200 | >300 | 5–10 | >1000 |
| Lithium—Ion Polymer | 2.70–4.20 | >150 | >300 | <5 | 1000–1500 |
| Lithium Iron Phosphate | 2.50–3.65 | >100 | >150 | <5 | >1000 |
| Process | Initial Voltage [V] | Initial SoC [%] | End Voltage [V] | End SoC [%] | Change of SoC [%] |
|---|---|---|---|---|---|
| Discharge 1 | 12.59 | 100 | 9.10 | 2 | 98 |
| Charge 1 | 9.10 | 2 | 12.61 | 101 | 99 |
| Discharge 2 | 12.61 | 101 | 9.10 | 1 | 100 |
| Charge 2 | 9.10 | 1 | 12.60 | 99 | 98 |
| Discharge 3 | 12.60 | 99 | 9.05 | 2 | 97 |
| Charge 3 | 9.05 | 2 | 12.60 | 97 | 95 |
| Discharge 4 | 12.60 | 97 | 8.97 | −2 | 99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, N.N.; Leuchter, J.; Pham, K.L.; Dong, Q.H. Battery Management System for Unmanned Electric Vehicles with CAN BUS and Internet of Things. Vehicles 2022, 4, 639-662. https://doi.org/10.3390/vehicles4030037
Pham NN, Leuchter J, Pham KL, Dong QH. Battery Management System for Unmanned Electric Vehicles with CAN BUS and Internet of Things. Vehicles. 2022; 4(3):639-662. https://doi.org/10.3390/vehicles4030037
Chicago/Turabian StylePham, Ngoc Nam, Jan Leuchter, Khac Lam Pham, and Quang Huy Dong. 2022. "Battery Management System for Unmanned Electric Vehicles with CAN BUS and Internet of Things" Vehicles 4, no. 3: 639-662. https://doi.org/10.3390/vehicles4030037
APA StylePham, N. N., Leuchter, J., Pham, K. L., & Dong, Q. H. (2022). Battery Management System for Unmanned Electric Vehicles with CAN BUS and Internet of Things. Vehicles, 4(3), 639-662. https://doi.org/10.3390/vehicles4030037