

Analysis of UAV Flight Patterns for Road Accident Site Investigation


Abstract
:1. Introduction
2. Materials and Methods
- AGL1 is the flight altitude above ground level (AGL) [m], calculated from the horizontal resolution;
- AGL2 is the flight altitude above ground level (AGL) [m], calculated from the vertical resolution;
- f is the focal distance [mm];
- GSD is the ground sample distance [m/px];
- HR is the horizontal resolution of the sensor [px];
- VR is the vertical resolution of the sensor [px];
- SW is the sensor width [mm];
- SH is the sensor height [mm].
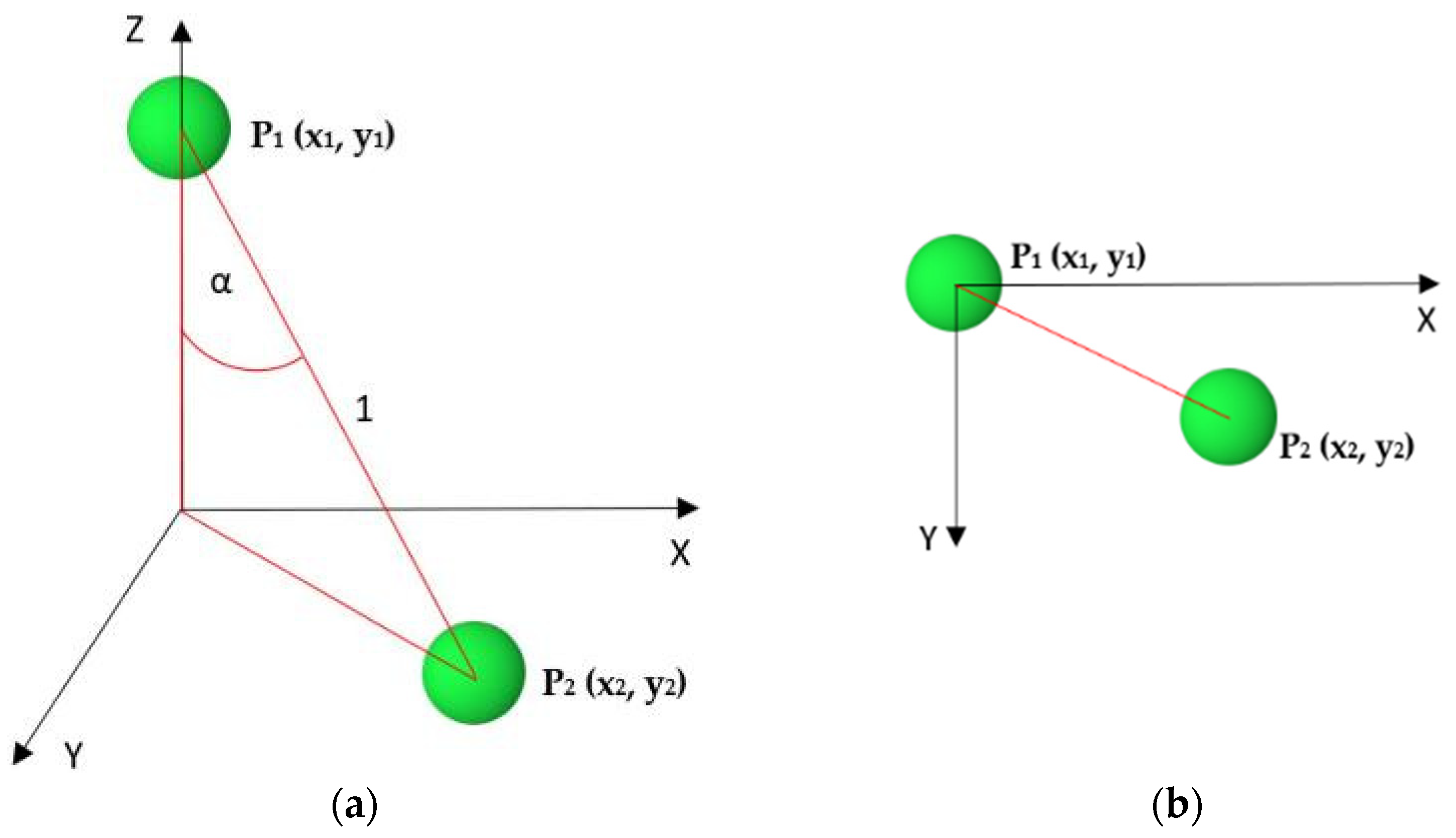
- —angle error;
- —deviation of the center of the lower sphere from the origin along axis x;
- —deviation of the center of the lower sphere from the origin along axis y.
3. Results
3.1. General Properties of Orthomosaics and Point Clouds
3.2. Block 1 (Nadir Images)—Deformations
3.3. Blocks 1 + 2
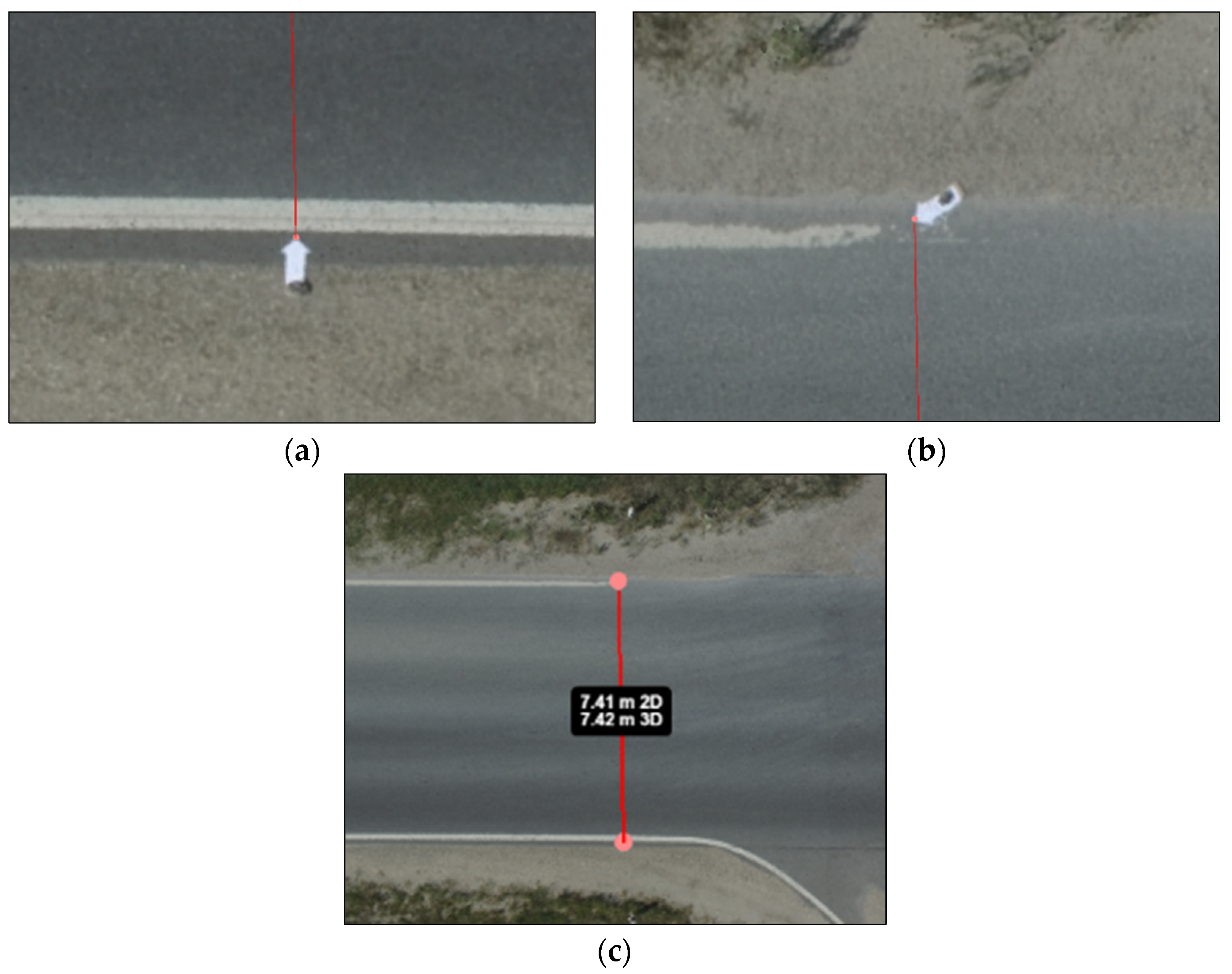
3.4. Accuracy
- —initial speed [m/s];
- —average deceleration [m/s2];
- —length of skid mark [m].
4. Discussion
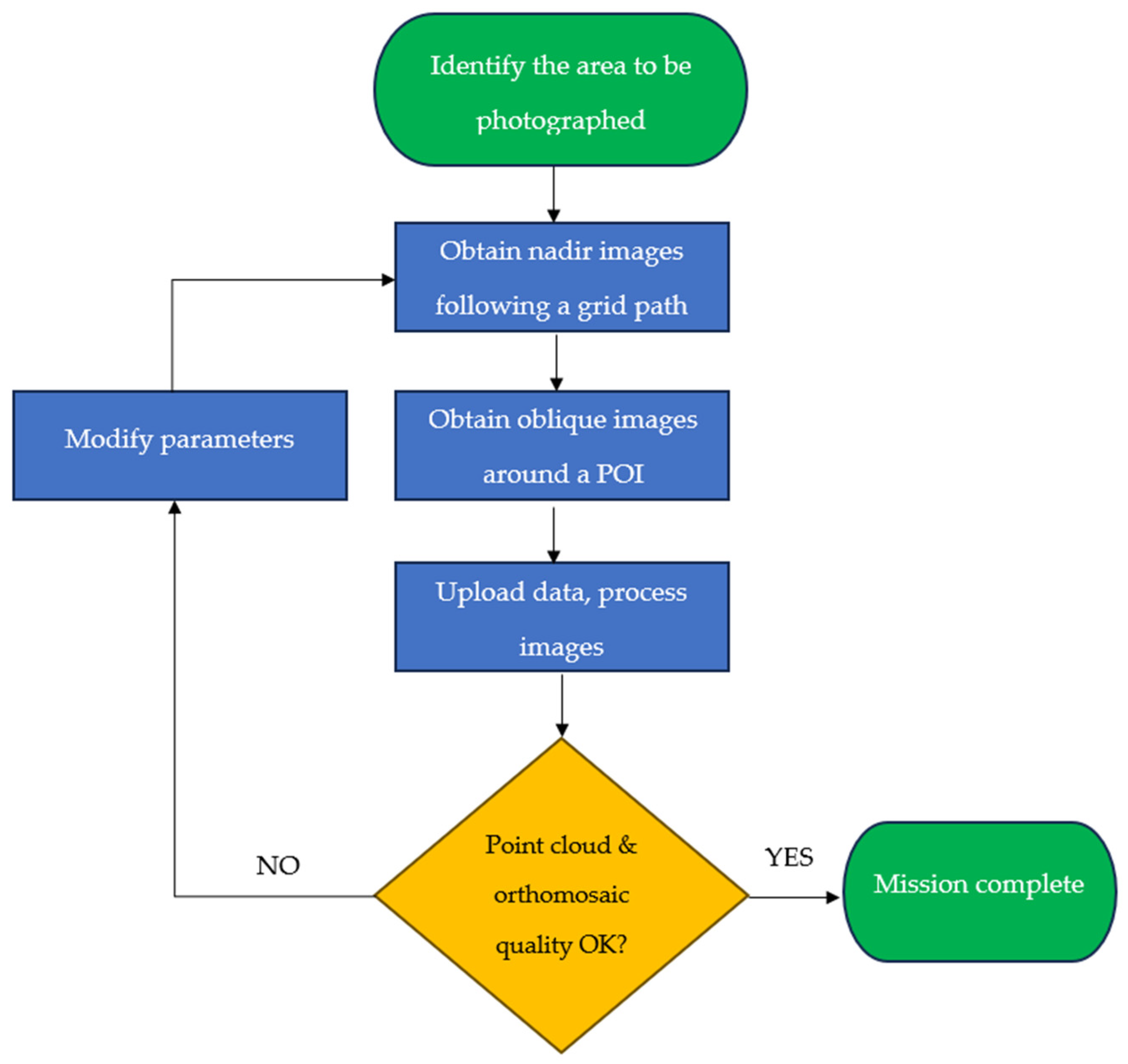
- Step 1: Delineate the area to be photographed. The boundaries of the relevant accident site must be identified. Establish the POI, i.e., the point around which the circular part of the mission is to be executed. Typically, this corresponds to the location where the vehicles involved in the accident are situated.
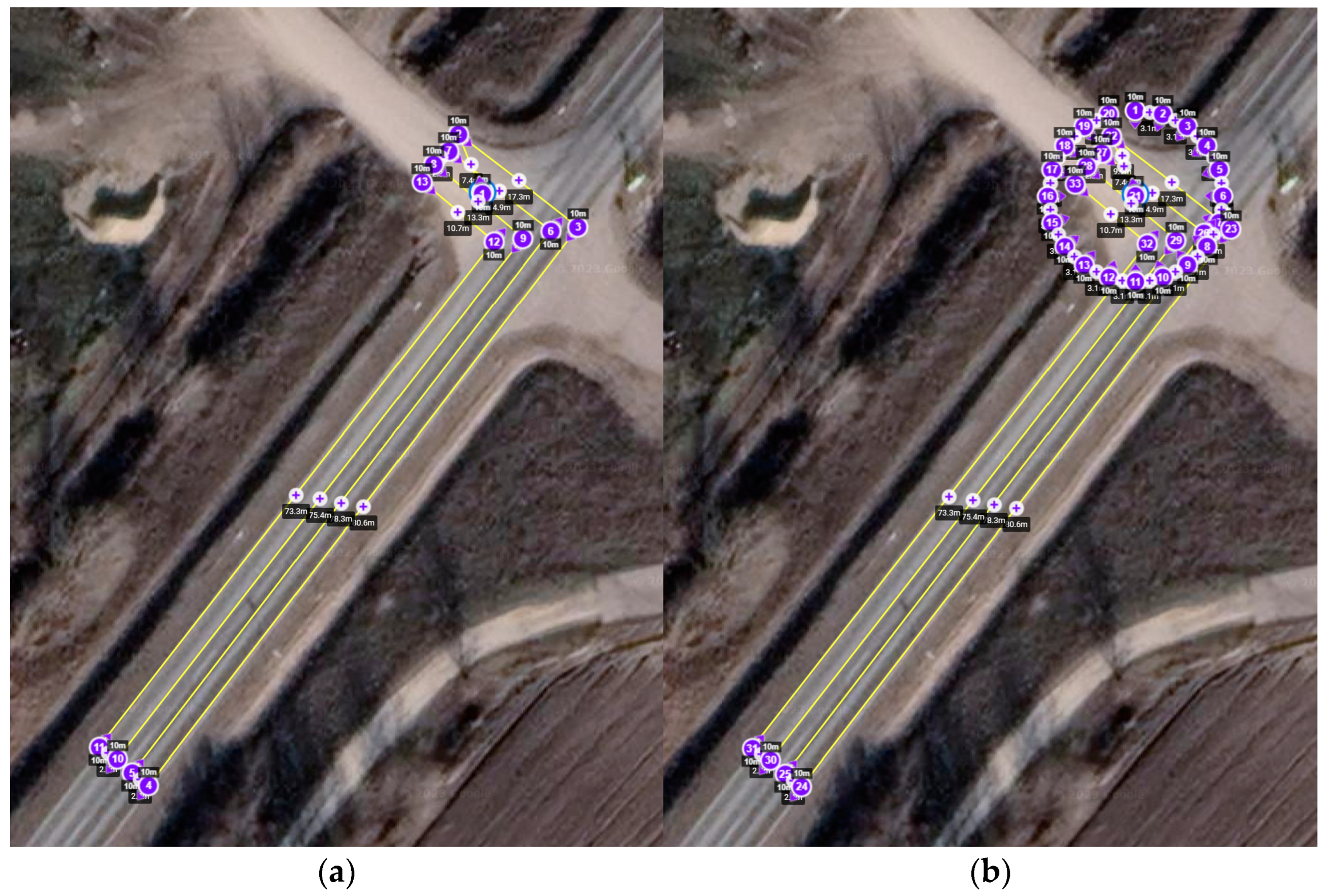
- Step 2: Obtain nadir images with the UAV following a grid path. The images should cover the whole area, with suitable longitudinal and transversal overlap (generally 60%). The number of images depends on their resolution and the dimensions of the site. In an average case, 60–100 images should be taken. A flight altitude of 10 m results in a point cloud and an orthomosaic with an adequate resolution.
- Step 3: Obtain oblique images around a POI. Images should be taken following a circular path, with the camera facing a characteristic point of the scene (e.g., a vehicle in its final rest position), with an oblique camera angle.
- Step 4: Upload data; process images. The images are to be uploaded to the processing site. Preliminary processing takes place.
- Step 5: Quality check of point cloud and orthomosaic. The point cloud and orthomosaic should be checked.
- Step 6: Modify parameters. If the quality of the point cloud and orthomosaic is not satisfactory (e.g., it is distorted or fragmented or has faulty spatial orientation), the flight path should be modified to increase overlap. A new image set should be obtained.
- Step 7: Mission complete. If the quality of the resulting point cloud and orthomosaic is satisfactory, the accident documentation process is complete.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dixit, A.; Kumar Chidambaram, R.; Allam, Z. Safety and Risk Analysis of Autonomous Vehicles Using Computer Vision and Neural Networks. Vehicles 2021, 3, 595–617. [Google Scholar] [CrossRef]
- Mohammed, S.I. An Overview of Traffic Accident Scene Investigation Using Different Techniques. Autom. Exp. 2023, 6, 68–79. [Google Scholar] [CrossRef]
- Agent, K.R.; Pigman, J.G. Traffic Accident Investigation; University of Kentucky, Kentucky Transportation Center: Lexington, KY, USA, 1993. [Google Scholar] [CrossRef]
- ENFSI. Best Practice Manual for Road Accident Reconstruction. ENFSI. 2015. Available online: http://enfsi.eu/wp-content/uploads/2016/09/4._road_accident_reconstruction_0.pdf (accessed on 16 September 2023).
- Topolšek, D.; Herbaj, E.A.; Sternad, M. The Accuracy Analysis of Measurement Tools for Traffic Accident Investigation. J. Transp. Tech. 2014, 4, 84–92. [Google Scholar] [CrossRef]
- Lengyel, H.; Maral, S.; Kerebekov, S.; Szalay, Z.; Török, Á. Modelling and Simulating Automated Vehicular Functions in Critical Situations—Application of a Novel Accident Reconstruction Concept. Vehicles 2023, 5, 266–285. [Google Scholar] [CrossRef]
- Li, G.; Lai, W.; Sui, X.; Li, X.; Qu, X.; Zhang, T.; Li, Y. Influence of traffic congestion on driver behavior in post-congestion driving. Accid. Anal. Prev. 2020, 141, 105508. [Google Scholar] [CrossRef]
- Ferencz, C.; Zöldy, M. Road traffic queue length estimation with artificial intelligence (AI) methods. Cogn. Sustain. 2023, 2. [Google Scholar] [CrossRef]
- Wang, J.; Liu, B.; Fu, T.; Liu, S.; Stipancic, J. Modeling when and where a secondary accident occurs. Accid. Anal. Prev. 2019, 130, 160–166. [Google Scholar] [CrossRef]
- Goodall, N.J. Probability of Secondary Crash Occurrence on Freeways with the Use of Private-Sector Speed Data. Transp. Res. Record 2017, 2635, 11–18. [Google Scholar] [CrossRef]
- Nam, D.; Mannering, F. An exploratory hazard-based analysis of highway incident duration. Transp. Res. A-Pol. 2000, 34, 85–102. [Google Scholar] [CrossRef]
- Alkaabi, A.M.; Dissanayake, D.; Bird, R. Analyzing Clearance Time of Urban Traffic Accidents in Abu Dhabi, United Arab Emirates, with Hazard-Based Duration Modeling Method. Transp. Res. Record 2011, 2229, 46–54. [Google Scholar] [CrossRef]
- Ghosh, I. Examination of the Factors Influencing the Clearance Time of Freeway Incidents. J. Transp. Sys. Eng. IT 2012, 12, 75−89. [Google Scholar] [CrossRef]
- Major, R. Közúti közlekedési balesetek miatt kialakult torlódások okozta időveszteség csökkentésének lehetőségei, avagy miként gyorsítható a helyszíni eljárás [The possibilities of reducing time loss in road congestion caused by accidents, or how to speed up on-site investigation]. Belügyi Szemle 2016, 69, 1009–1026. [Google Scholar] [CrossRef]
- Weiss, S.L. (Ed.) Handbook of Forensic Photography; Taylor Francis: Boca Raton, FL, USA, 2002. [Google Scholar]
- U.S. Department of Transportation. Crash Investigation and Reconstruction Technologies and Best Practices; Federal Highway Administration: Washington, DC, USA, 2015. Available online: https://rosap.ntl.bts.gov/view/dot/50639/dot_50639_DS1.pdf (accessed on 3 September 2023).
- Cristiani, A.L.; Immich, R.; Akabane, A.T.; Madeira, E.R.; Villas, L.A.; Meneguette, R.I. ATRIP: Architecture for Traffic Classification Based on Image Processing. Vehicles 2020, 2, 303–317. [Google Scholar] [CrossRef]
- Saveliev, A.; Izhboldina, V.; Letenkov, M.; Aksamentov, E.; Vatamaniuk, I. Method for automated generation of road accident scene sketch based on data from mobile device camera. Transp. Res. Proc. 2020, 50, 608–613. [Google Scholar] [CrossRef]
- The Johns Hopkins University. Operational Evaluation of Unmanned Aircraft Systems for Crash Scene Reconstruction, Operational Evaluation Report, Version 1.0; Applied Physics Laboratory, National Criminal Justice Reference Service: Laurel, MD, USA, 2018. Available online: https://www.ojp.gov/pdffiles1/nij/grants/251628.pdf (accessed on 3 September 2023).
- Outay, F.; Mengash, H.A.; Abdan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. A-Pol. 2020, 141, 116–129. [Google Scholar] [CrossRef] [PubMed]
- Saveliev, A.; Lebedeva, V.; Lebedev, I.; Uzdiaev, M. An Approach to the Automatic Construction of a Road Accident Scheme Using UAV and Deep Learning Methods. Sensors 2022, 22, 4728. [Google Scholar] [CrossRef] [PubMed]
- PixD. A New Protocol of CSI for The Royal Canadian Mounted Police. (n.d.). Available online: https://assets.ctfassets.net/go54bjdzbrgi/2ufTRuEockU20mWCmosUmE/88ad2758f8c1042ab696c974627239e6/RCMP_Pix4D_collision_crime_scene_investigation_protocol.pdf (accessed on 2 September 2023).
- Kamnik, R.; Perc, M.N.; Topolšek, D. Using the scanners and drone for comparison of point cloud accuracy at traffic accident analysis. Accid. Anal. Prev. 2020, 135, 105391. [Google Scholar] [CrossRef]
- Desai, J.; Sakhare, R.; Rogers, S.; Mathew, J.K.; Habib, A.; Bullock, D. Using Connected Vehicle Data to Evaluate Impact of Secondary Crashes on Indiana Interstates. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems, Indianapolis, IN, USA, 19–22 September 2021; IEEE: Indianapolis, IN, USA, 2021; pp. 4057–4063. [Google Scholar] [CrossRef]
- Osman, M.R.; Tahar, K.N. 3D accident reconstruction using low-cost imaging technique. Adv. Eng. Softw. 2016, 100, 231–237. [Google Scholar] [CrossRef]
- Arnold, E.D. Use of Photogrammetry as a Tool for Accident Investigation and Reconstruction: A Review of the Literature and State of the Practice; Virginia Transportation Research Council: Charlottesville, VA, USA, 2007. Available online: https://rosap.ntl.bts.gov/view/dot/19853 (accessed on 3 September 2023).
- Wang, J.; Li, Z.; Ying, F.; Zou, D.; Chen, Y. Reconstruction of a real-world car-to-pedestrian collision using geomatics techniques and numerical simulations. J. Forensic Legal Med. 2022, 91, 102433. [Google Scholar] [CrossRef]
- Török, Á.; Bögöly, G.; Somogyi, Á.; Lovas, T. Application of UAV in Topographic Modelling and Structural Geological Mapping of Quarries and Their Surroundings—Delineation of Fault-Bordered Raw Material Reserves. Sensors 2020, 20, 489. [Google Scholar] [CrossRef]
- Castro, J.; Morales-Rueda, F.; Alcaraz-Segura, D.; Tabik, S. Forest restoration is more than firing seeds from a drone. Restor. Ecol. 2023, 31, e13736. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Haleem, H.; Lavagetto, F.; Sciarrone, A. A Systematic Review of Drone Based Road Traffic Monitoring System. IEEE Access 2022, 10, 101537–101555. [Google Scholar] [CrossRef]
- Pádua, L.; Sousa, J.; Vanko, J.; Hruška, J.; Adão, T.; Peres, E.; Sousa, A.; Sousa, J.J. Digital Reconstitution of Road Traffic Accidents: A Flexible Methodology Relying on UAV Surveying and Complementary Strategies to Support Multiple Scenarios. Int. J. Environ. Res. Public Health 2020, 17, 1868. [Google Scholar] [CrossRef] [PubMed]
- Hastaoglu, K.O.; Kapicioglu, H.S.; Gül, Y.; Poyraz, F. Investigation of the effect of height difference and geometry of GCP on position accuracy of point cloud in UAV photogrammetry. Surv. Rev. 2023, 55, 325–337. [Google Scholar] [CrossRef]
- Zhang, K.; Okazawa, H.; Hayashi, K.; Hayashi, T.; Fiwa, L.; Maskey, S. Optimization of Ground Control Point Distribution for Unmanned Aerial Vehicle Photogrammetry for Inaccessible Fields. Sustainability 2022, 14, 9505. [Google Scholar] [CrossRef]
- Su, S.; Liu, W.; Li, K.; Yang, G.; Feng, C.; Ming, J.; Liu, S.; Yin, Z. Developing an unmanned aerial vehicle-based rapid mapping system for traffic accident investigation. Aust. J. Forensic Sci. 2016, 48, 454–468. [Google Scholar] [CrossRef]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Ekaso, D.; Nex, F.; Kerle, N. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing. Geo-Spat. Inf. Sci. 2020, 23, 165–181. [Google Scholar] [CrossRef]
- Liu, X.; Lian, X.; Yang, W.; Wang, F.; Han, Y.; Zhang, Y. Accuracy Assessment of a UAV Direct Georeferencing Method and Impact of the Configuration of Ground Control Points. Drones 2022, 6, 30. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-Effective Non-Metric Photogrammetry from Consumer-Grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Processes 2017, 42, 473–486. [Google Scholar] [CrossRef]
- Cook, K.L.; Dietze, M. Short Communication: A simple workflow for robust low-cost UAV-derived change detection without ground control points. Earth Surf. Dynam. 2019, 7, 1009–1017. [Google Scholar] [CrossRef]
- Desai, J.; Mathew, J.K.; Zhang, Y.; Hainje, R.; Horton, D.; Hasheminasab, S.M.; Habib, A.; Bullock, D.M. Assessment of Indiana Unmanned Aerial System Crash Scene Mapping Program. Drones 2022, 6, 259. [Google Scholar] [CrossRef]
- Norahim, M.N.; Tahar, K.N.; Maharjan, G.R.; Matos, J.C. Reconstructing 3D model of accident scene using drone image. Int. J. Electr. Comp. Eng. 2023, 13, 4087–4100. [Google Scholar] [CrossRef]
- Zulkifli, M.H.; Tahar, K.N. The Influence of UAV Altitudes and Flight Techniques in 3D Reconstruction Mapping. Drones 2023, 7, 227. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Ballestros-Pérez, P.; Rodriguez-Pérez, J.R. Reducing systematic dome errors in digital elevation models through better UAV flight design. Earth Surf. Process. 2020, 45, 2143–2147. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- James, M.R.; Antoniazza, G.; Robson, S.; Lane, S.N. Mitigating systematic error in topographic models for geomorphic change detection: Accuracy, precision and considerations beyond off-nadir imagery. Earth Surf. Process. Landf. 2020, 45, 2251–2271. [Google Scholar] [CrossRef]
- Liu, Z.; He, J.; Zhang, C.; Xing, L.; Zhou, B. The impact of road alignment characteristics on different types of traffic accidents. J. Transp. Saf. Secur. 2020, 12, 697–726. [Google Scholar] [CrossRef]
- Mueller, M.; Dietenberger, S.; Nestler, M.; Hese, S.; Ziemer, J.; Bachmann, F.; Leiber, J.; Dubois, C.; Thiel, C. Novel UAV Flight Designs for Accuracy Optimization of Structure from Motion Data Products. Remote Sens. 2023, 15, 4308. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Agisoft. Agisoft Metashape 2.0.1. 2023. Available online: https://www.agisoft.com/features/professional-edition/ (accessed on 2 February 2023).
- Litchi. Litchi for DJI Drones. 2023. Available online: https://flylitchi.com/ (accessed on 2 February 2023).
- Agisoft. Metashape Python Reference. Release 2.0.0. 2022. Available online: https://www.agisoft.com/pdf/metashape_python_api_2_0_0.pdf (accessed on 2 February 2023).
- DJI. DJI Mavic Air 2, Specs. n.d. Available online: https://www.dji.com/hu/mavic-air-2/specs (accessed on 2 September 2023).
- DJI. DJI Air 2 S, Specs. n.d. Available online: https://www.dji.com/hu/air-2s/specs (accessed on 2 September 2023).
- DJI. DJI Phantom 4, Specs. n.d. Available online: https://www.dji.com/hu/phantom-4-pro/info (accessed on 2 September 2023).
- DJI. DJI Inspire 1, Specs. n.d. Available online: https://www.dji.com/hu/inspire-1/info (accessed on 2 September 2023).
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.d.J.; Enciso, J. Digital Terrain Models Generated with Low-Cost UAV Photogrammetry: Methodology and Accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Camera Model | CMOS Sensor [inch] | Resolution | Pixel Size [um] | Focal Length [mm] |
|---|---|---|---|---|---|
| DJI Mavic Air 2 | DJI FC3170 | 1/2 | 4000 × 2250 | 1.77 × 1.77 | 4.5 |
| DJI Air 2S | DJI FC3411 | 1 | 5472 × 3648 | 2.51 × 2.51 | 8.38 |
| DJI Phantom 4 Pro+ | DJI FC6310 | 1 | 5472 × 3078 | 2.53 × 2.53 | 8.8 |
| DJI Inspire 1 v2.0 | DJI FC350 | 1/2.3 | 4000 × 2250 | 1.7 × 1.7 | 3.61 |
| UAV | f [mm] | GSD [m/px] | HR [px] | VR [px] | SW [mm] | SH [mm] | AGL1 [m] | AGL2 [m] |
|---|---|---|---|---|---|---|---|---|
| DJI Mavic Air 2 | 4.5 | 0.0033 | 4000 | 2250 | 7.1 | 4.0 | 8.4 | 8.4 |
| DJI Air 2S | 8.38 | 0.0033 | 5472 | 3648 | 13.7 | 9.2 | 11.0 | 11.0 |
| DJI Phantom 4 Pro+ | 8.8 | 0.0033 | 5472 | 3078 | 13.8 | 7.8 | 11.5 | 11.5 |
| DJI Inspire 1 v2.0 | 3.61 | 0.0033 | 4000 | 2250 | 6.8 | 3.8 | 7.0 | 7.0 |
| UAV | Flying Altitude [m] | Flying Time [min] | No. of Images | Media Size |
|---|---|---|---|---|
| DJI Mavic Air 2 | 10.5 | 10 | 162 | 988 MB |
| DJI Air 2S | 11 | 10 | 163 | 1.8 GB |
| DJI Phantom 4 Pro+ | 10.3 | 10 | 162 | 1.2 GB |
| DJI Inspire 1 v2.0 | 13.9 | 10 | 163 | 639 MB |
| Aircraft | Ortho- Mosaic Resolution | Ortho-Mosaic Size | Ground Resolution [mm/pix] | No. of Point Cloud Points | Processing Time [min:s] | No. of Point Cloud Points | Processing Time [min:s] |
|---|---|---|---|---|---|---|---|
| High Quality | Low Quality | ||||||
| DJI Mavic Air 2 | 24,738 × 28,994 | 534 MB | 3.58 | 48,594,498 | 21 min 6 s | 4,029,374 | 3 min 6 s |
| DJI Air 2S | 29,146 × 34,624 | 769 MB | 3.17 | 61,258,189 | 21 min 5 s | 4,890,043 | 5 min 38 s |
| DJI Phantom 4 Pro+ | 45,152 × 52,514 | 1.06 GB | 2.81 | 83,873,498 | 17 min 42 s | 6,584,051 | 6 min 0 s |
| DJI Inspire 1 v2.0 | 23,624 × 25,920 | 348 MB | 5.9 | 37,971,065 | 9 min 31 s | 2,620,706 | 3 min 2 s |
| UAV | 3D [m] | 2D [m] | ∆s [m] | Error [%] |
|---|---|---|---|---|
| DJI Mavic Air 2 | 7.40 | 7.39 | 0.01 | 0.135 |
| DJI Air 2S | 7.37 | 7.37 | 0.00 | 0.00 |
| DJI Phantom 4 Pro+ | 7.42 | 7.41 | 0.01 | 0.135 |
| DJI Inspire 1 v2.0 | 7.40 | 7.40 | 0.00 | 0.00 |
| UAV | Distance Measured on Point Cloud [m] | ∆s [m] | Error [%] |
|---|---|---|---|
| DJI Mavic Air 2 | 7.40 | 0.02 | 0.270 |
| DJI Air 2S | 7.37 | 0.05 | 0.674 |
| DJI Phantom 4 Pro+ | 7.42 | 0.00 | 0.000 |
| DJI Inspire 1 v2.0 | 7.40 | 0.02 | 0.270 |
| s [m] | v [km/h] | Δv [km/h] | Error [%] |
|---|---|---|---|
| 15 − 1% | 53.729 | −0.271 | 0.501% |
| 15 | 54 | – | – |
| 15 + 1% | 54.269 | 0.269 | 0.499% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vida, G.; Melegh, G.; Süveges, Á.; Wenszky, N.; Török, Á. Analysis of UAV Flight Patterns for Road Accident Site Investigation. Vehicles 2023, 5, 1707-1726. https://doi.org/10.3390/vehicles5040093
Vida G, Melegh G, Süveges Á, Wenszky N, Török Á. Analysis of UAV Flight Patterns for Road Accident Site Investigation. Vehicles. 2023; 5(4):1707-1726. https://doi.org/10.3390/vehicles5040093
Chicago/Turabian StyleVida, Gábor, Gábor Melegh, Árpád Süveges, Nóra Wenszky, and Árpád Török. 2023. "Analysis of UAV Flight Patterns for Road Accident Site Investigation" Vehicles 5, no. 4: 1707-1726. https://doi.org/10.3390/vehicles5040093
APA StyleVida, G., Melegh, G., Süveges, Á., Wenszky, N., & Török, Á. (2023). Analysis of UAV Flight Patterns for Road Accident Site Investigation. Vehicles, 5(4), 1707-1726. https://doi.org/10.3390/vehicles5040093