




Enhancing Urban Intersection Efficiency: Utilizing Visible Light Communication and Learning-Driven Control for Improved Traffic Signal Performance

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Traffic Controlled Multi-Intersections
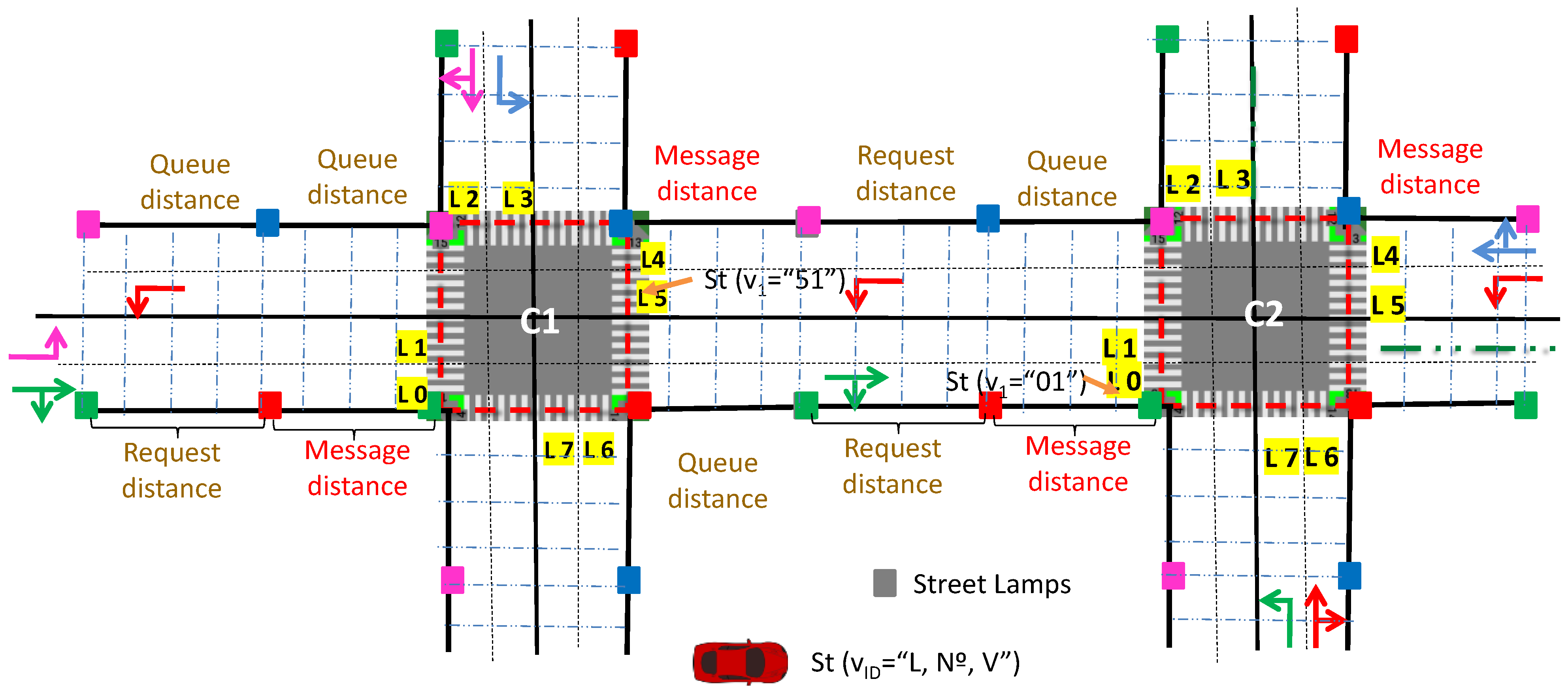
2.1. Multi-Intersection Complexity
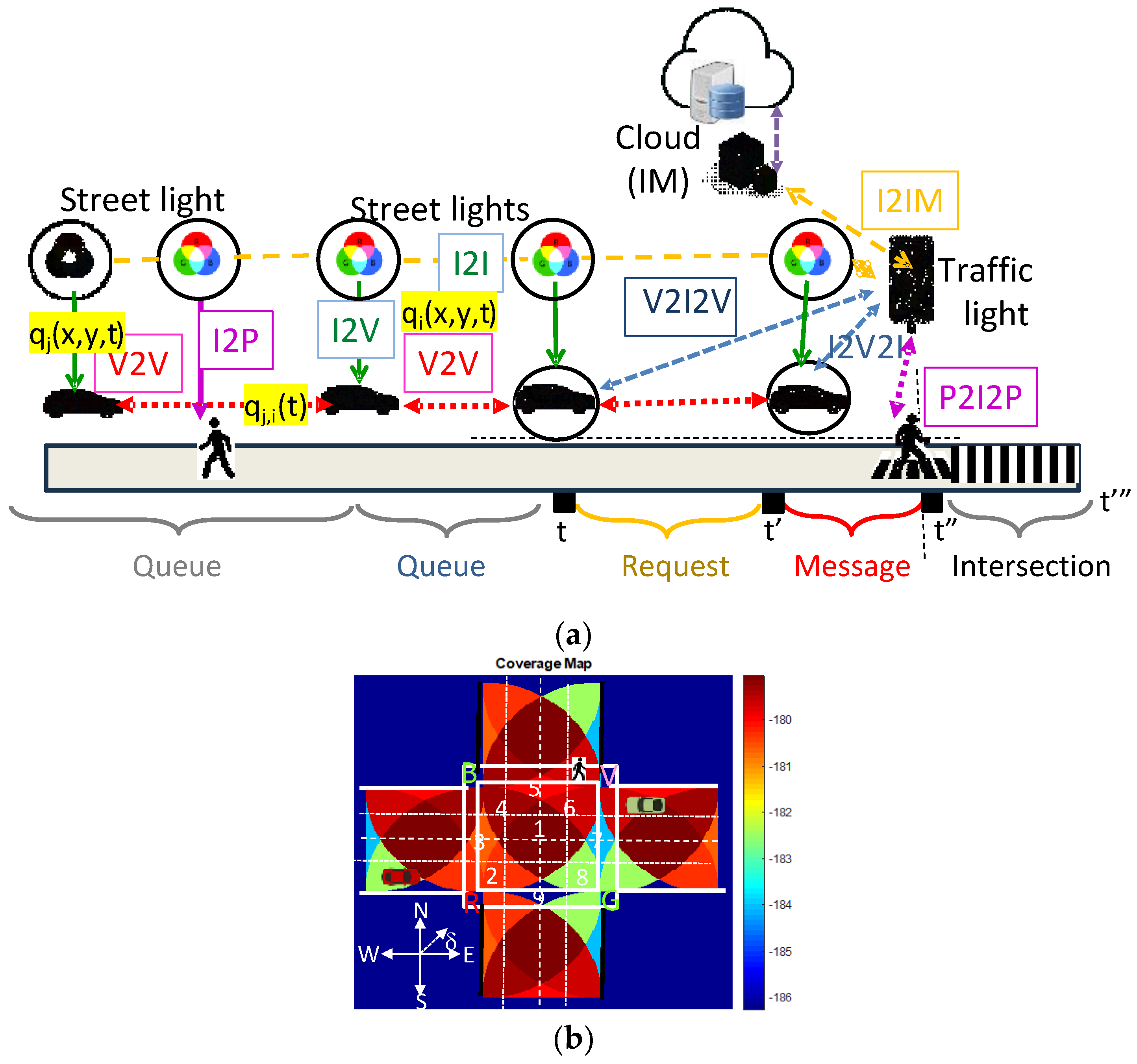
2.2. V-VLC Communication Link

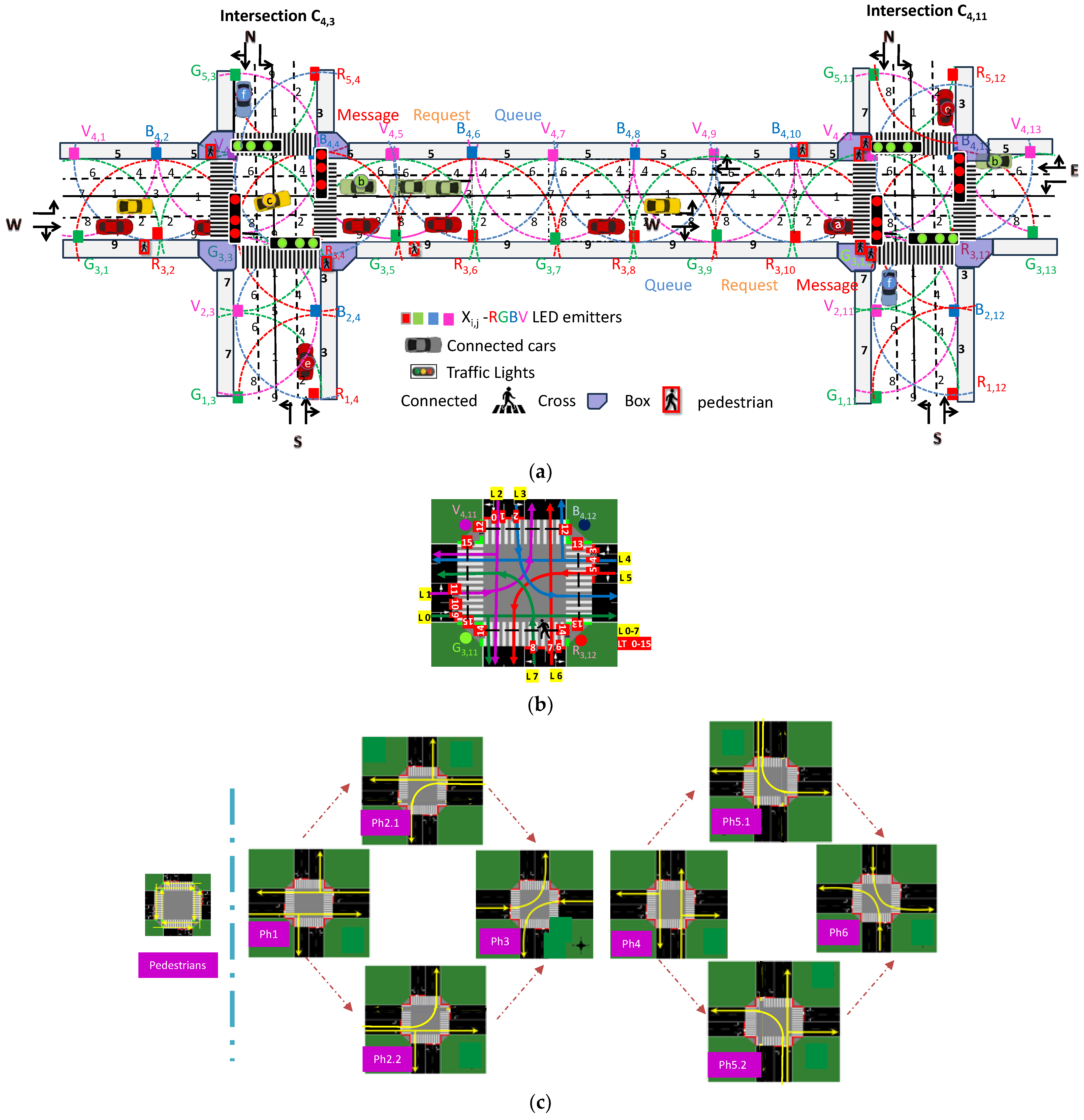
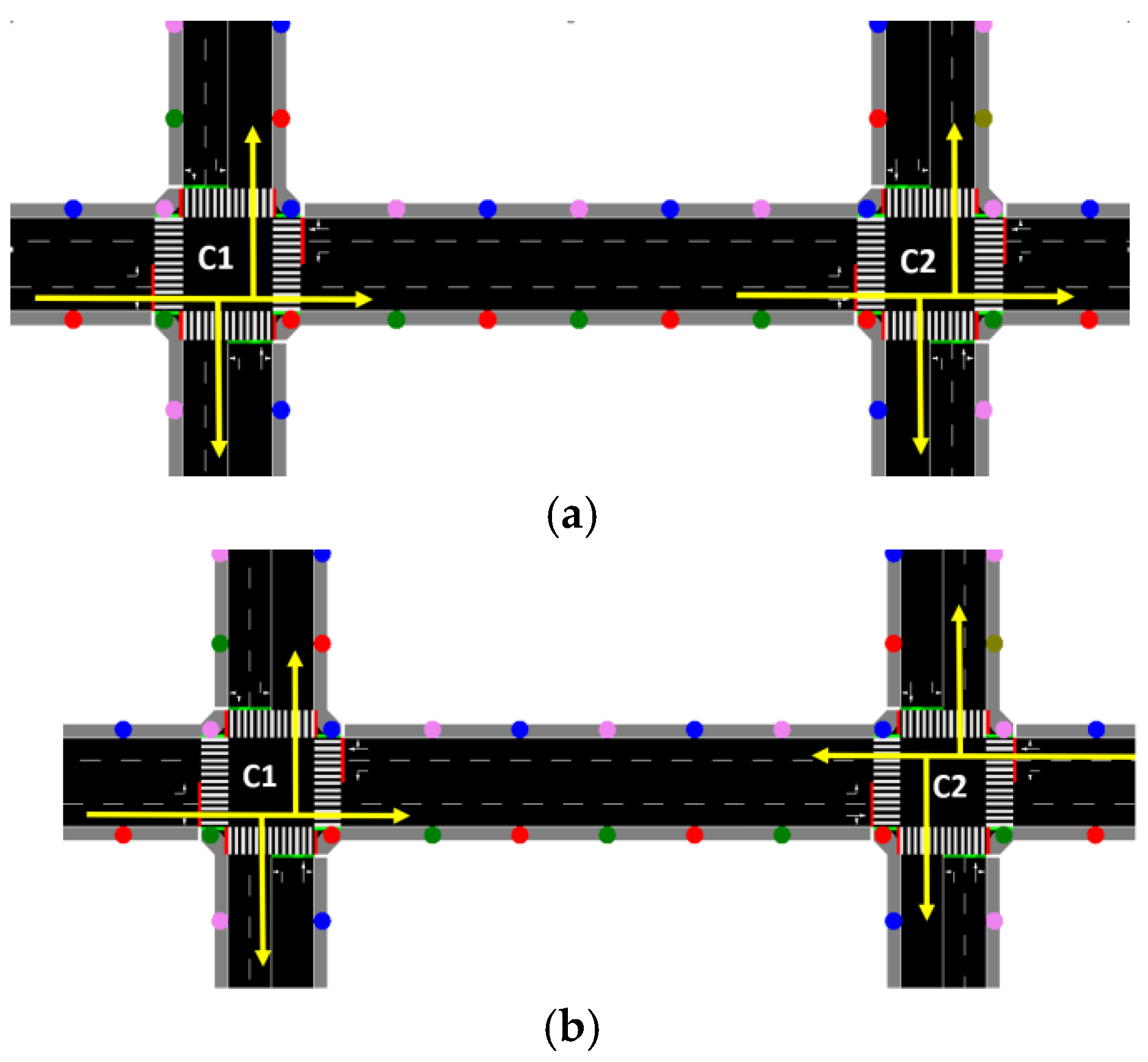
2.3. Scenario, Environment, and Sequential Phases Used for the Simulation
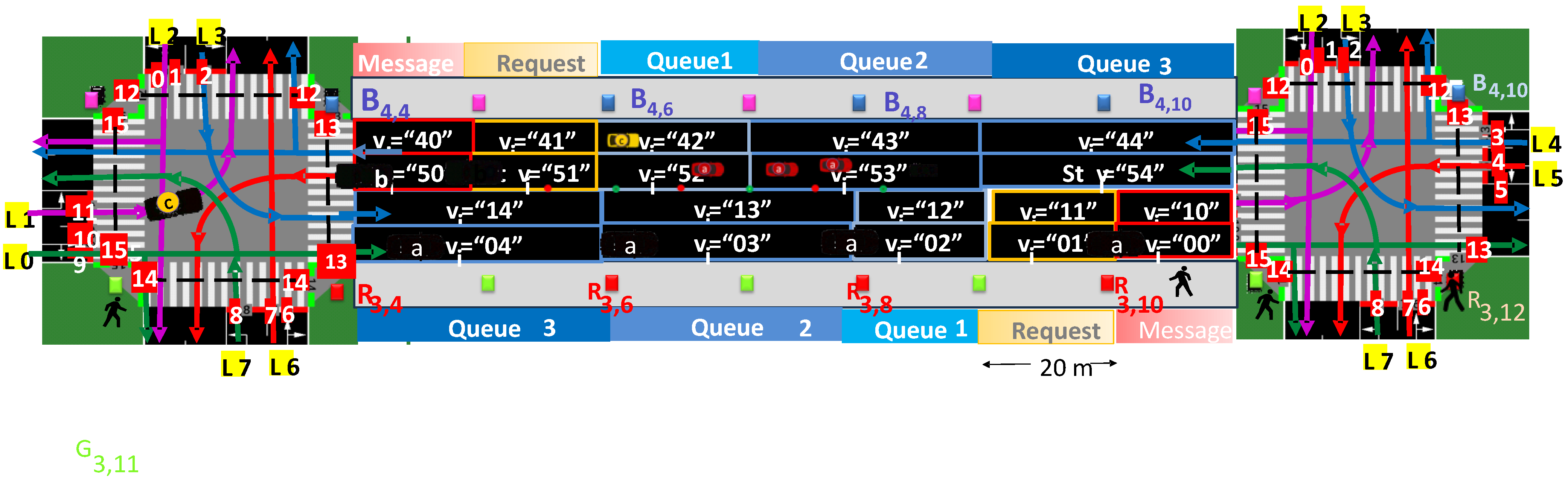
- Twenty-four vehicles, from the west (W), approach the intersection. Among these, twenty vehicles (category a1) continue forward, depicted by the red flow, while four vehicles (category c1) exclusively make left turns, represented by the yellow flow.
- Vehicles from the east (E) contribute to the green flow, with thirteen vehicles (category b1) continuing straight, and two vehicles (category b2) making left turns.
- The orange flow originates from the south (S) and consists of six vehicles (category e1). Within these, two vehicles take a left-turn approach (category e2), while the other four continue straight.
- Lastly, the blue flow comprises thirteen vehicles (category f1) arriving from the north. Nine of them proceed straight ahead, while the others execute a left turn at the intersection.
2.4. Communication Protocol
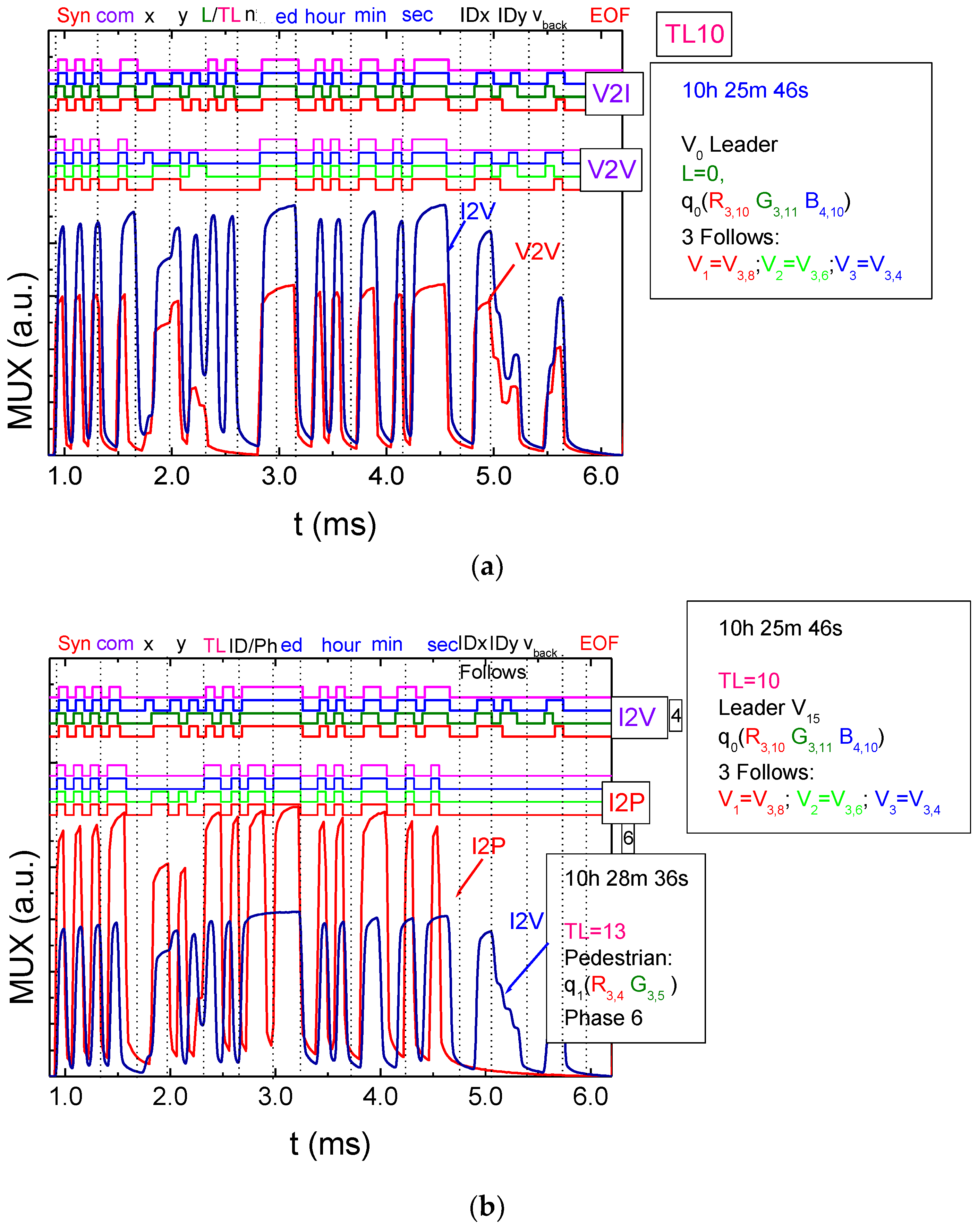
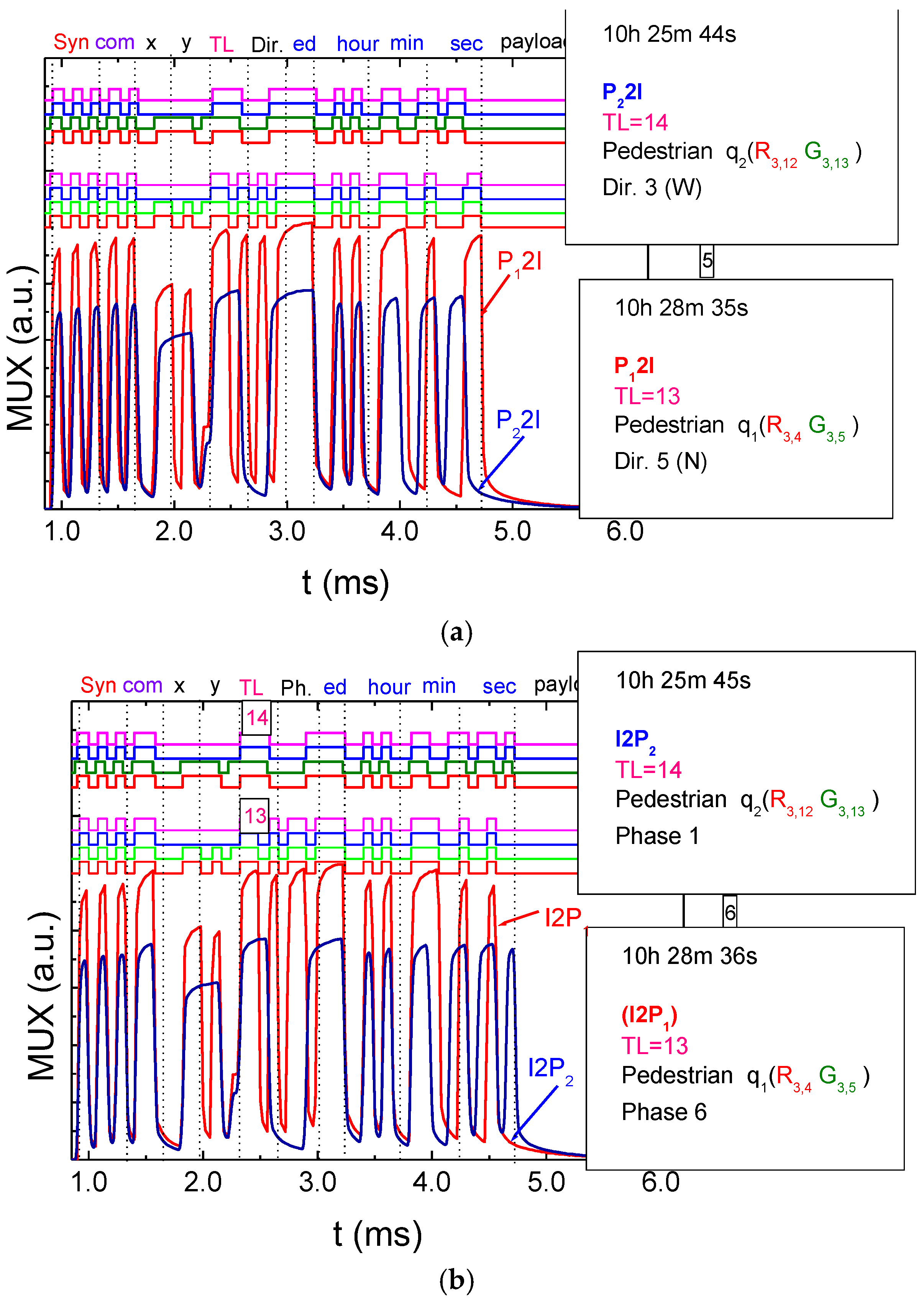
2.5. Transmitted and Decoded VLC Signals
3. Dynamic Traffic Flow Control: Simulation
3.1. SUMO Simulation: State Representation
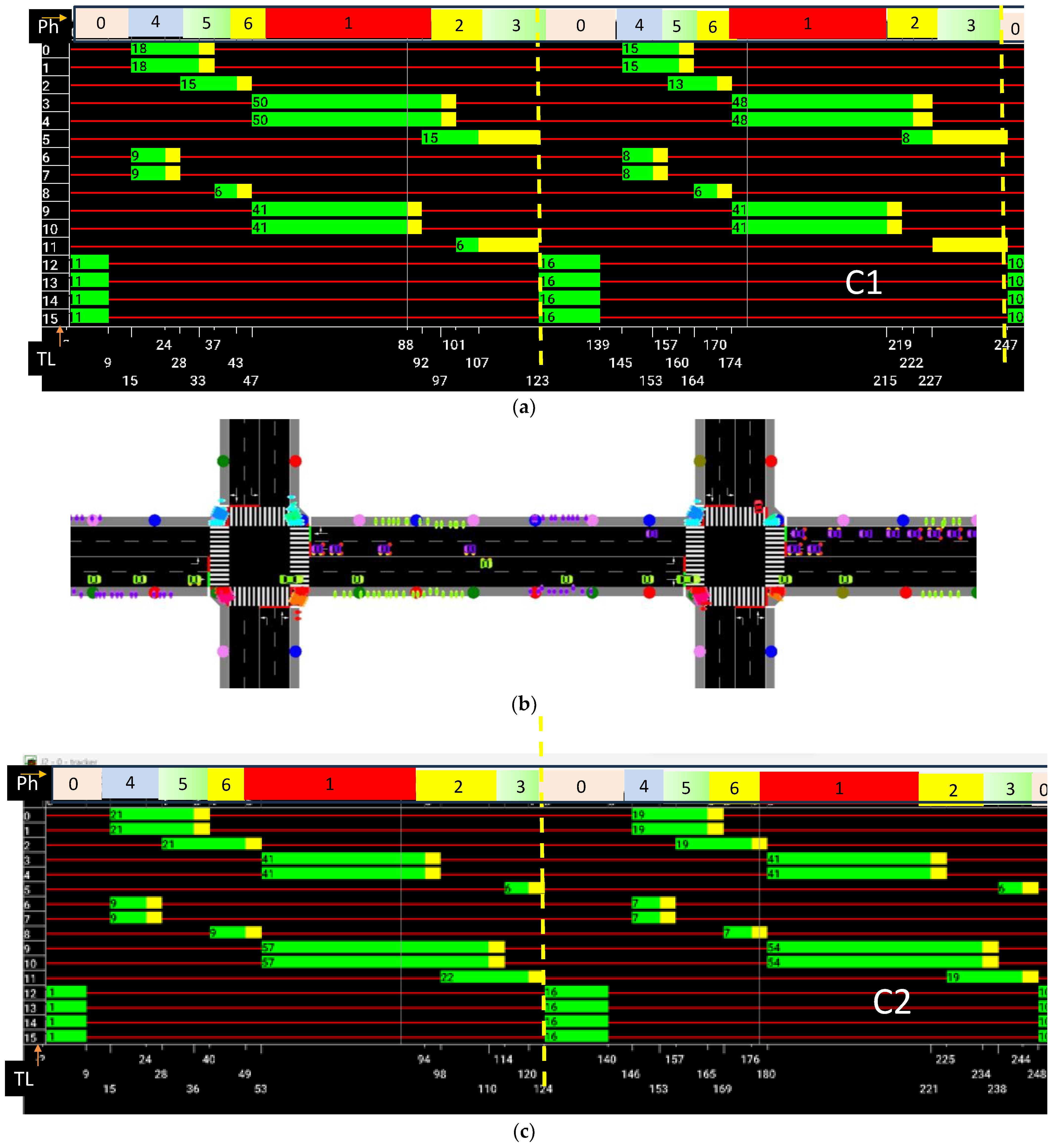
3.2. SUMO Simulation: Cycle and Phases Durations
3.3. Dynamic vs. Intelligent Traffic Management: Leveraging VLC and DRL
4. Intelligent Traffic Flow Control Simulation
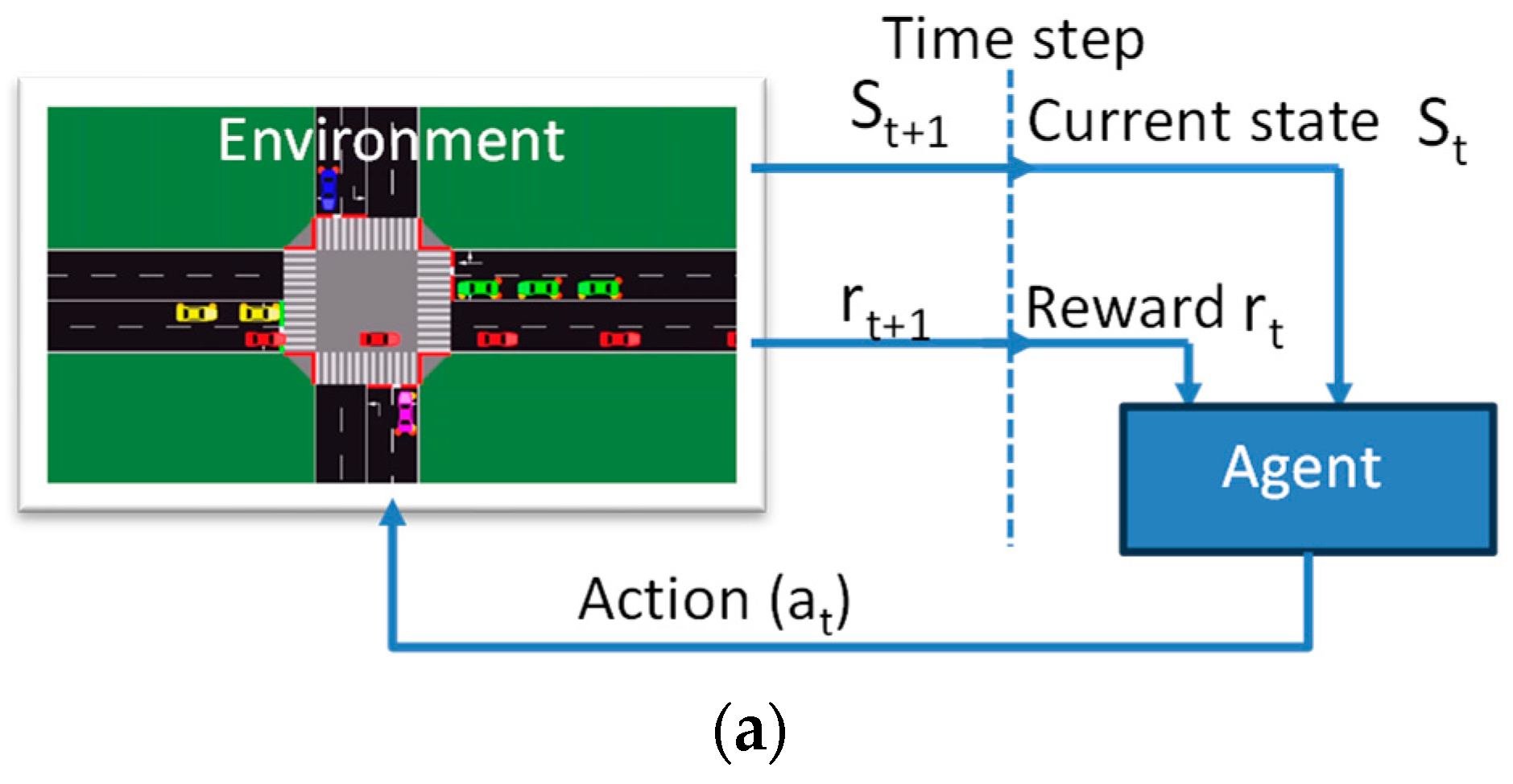
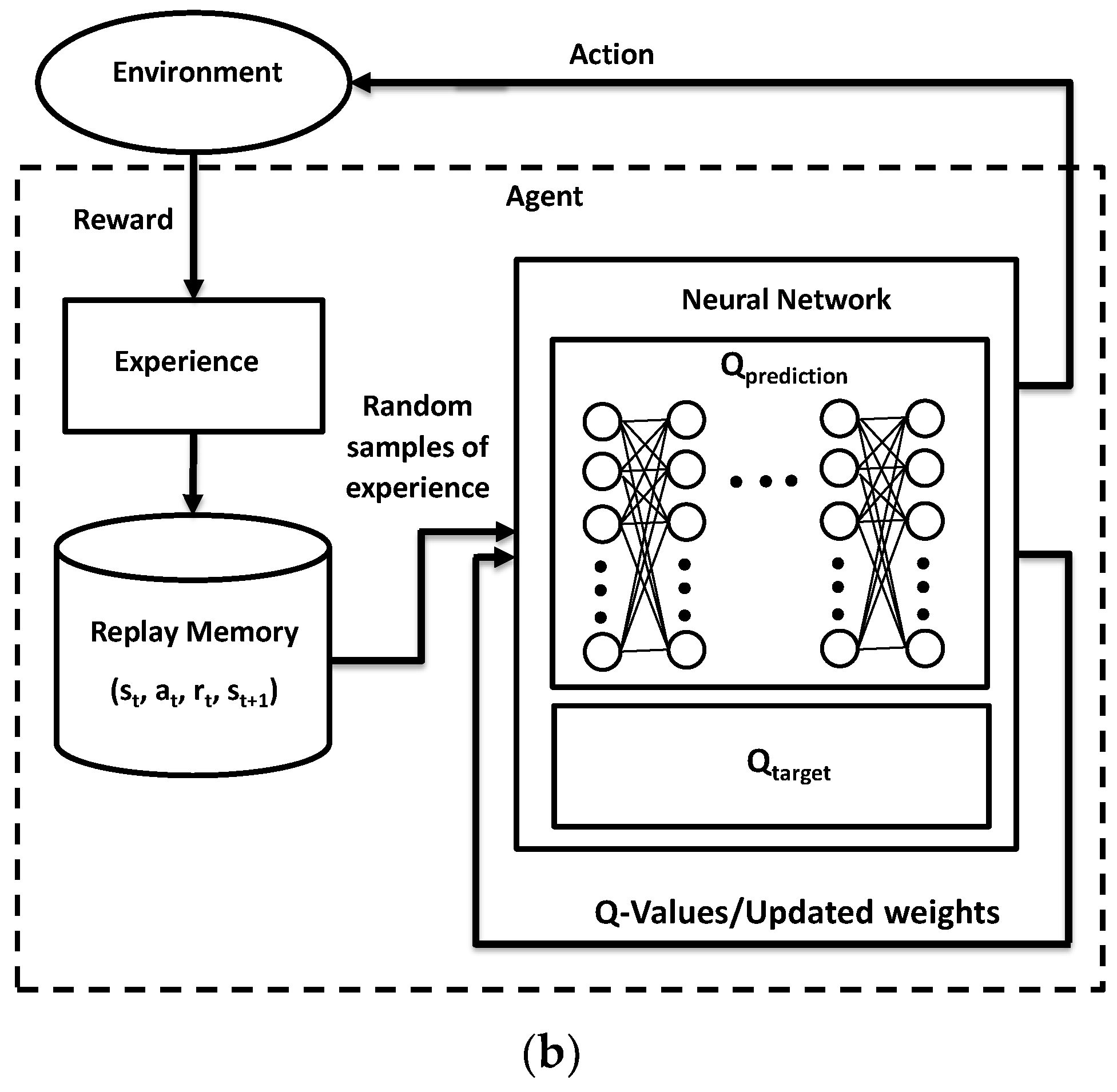
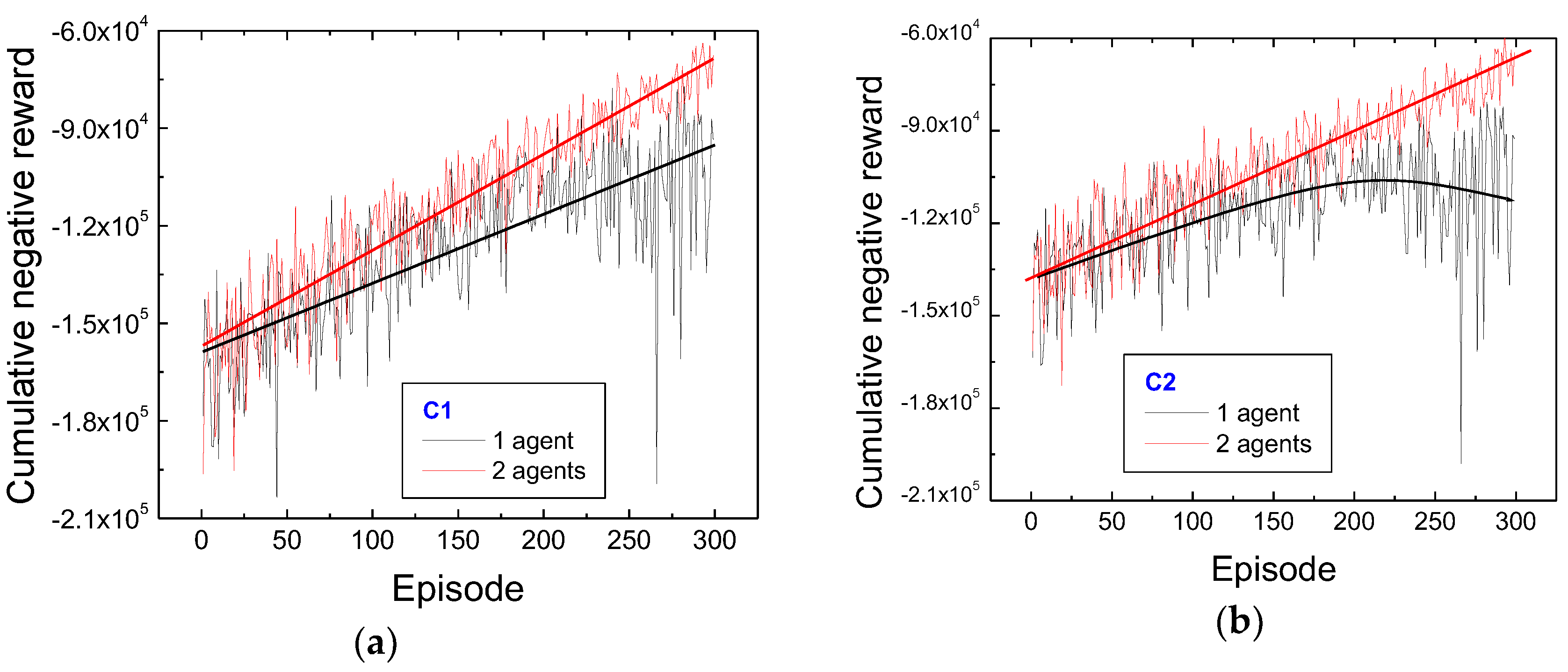
4.1. Reinforcement Learning and Deep Q-Learning
4.2. RL-Based Traffic Control Model with VLC Integration
4.3. Implementing Symmetric Homogeneous Rewards in Training
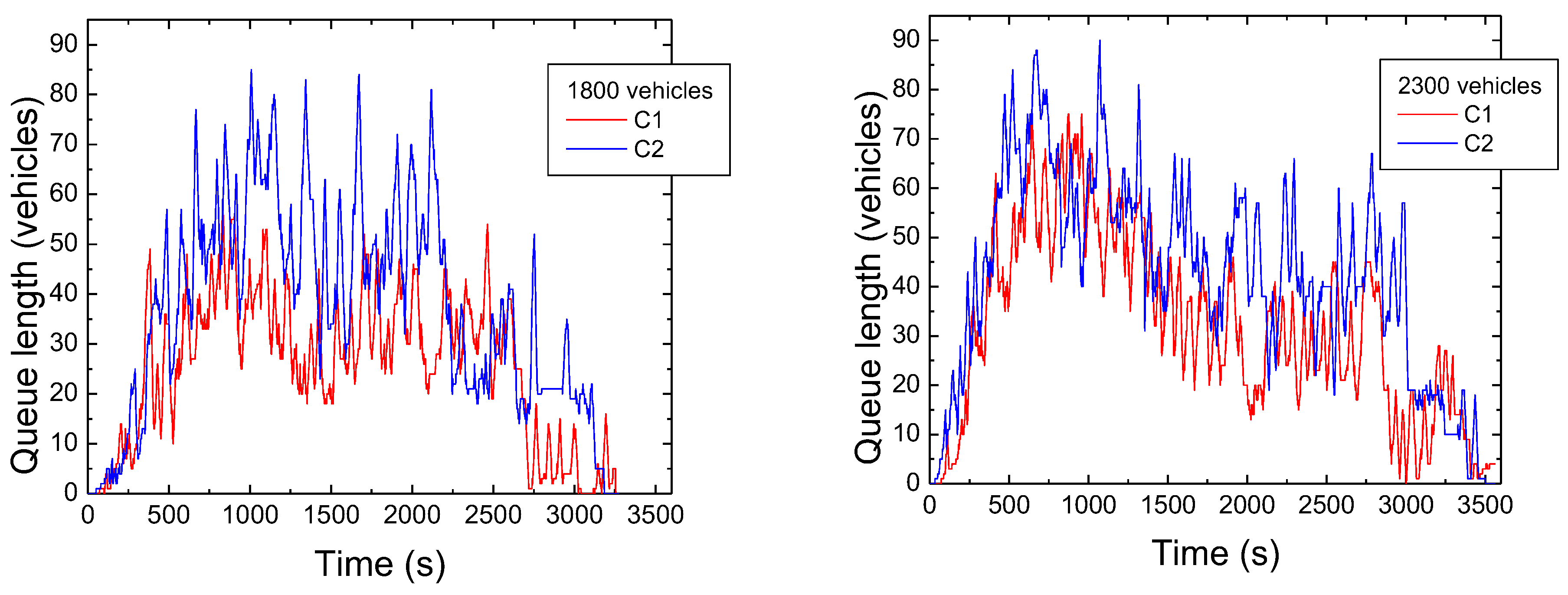
4.4. Analyzing the Performance of Neural Networks in High- and Low-Traffic Environments: A Study of a 160 m (1 × 2) Road Topology
4.5. Inter-Intersection Roads: 160 m (1 × 2), 250 m (1 × 2), and 400 m (1 × 2) Road Network Topology
5. Advancements in Urban Traffic Management through Integrated Technologies and Innovative Strategies
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- O’Brien, D.; Le Minh, H.; Zeng, L.; Faulkner, G.; Lee, K.; Jung, D.; Oh, Y.; Won, E.T. Indoor Visible Light Communications: Challenges and prospects. Proc. SPIE 2008, 7091, 60–68. [Google Scholar]
- Parth, H.; Pathak, X.; Pengfei, H.; Prasant, M. Visible Light Communication, Networking and Sensing: Potential and Challenges. IEEE Commun. Surv. Tutor. 2015, 17, 2047–2077. [Google Scholar]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Caputo, S.; Mucchi, L.; Cataliotti, F.; Seminara, M.; Nawaz, T.; Catani, J. Measurement-based VLC channel characterization for I2V communications in a real urban scenario. Veh. Commun. 2021, 28, 100305. [Google Scholar] [CrossRef]
- Vieira, M.A.; Vieira, M.; Louro, P.; Vieira, P. Cooperative vehicular communication systems based on visible light communication. Opt. Eng. 2018, 57, 076101. [Google Scholar] [CrossRef]
- Sousa, I.; Queluz, P.; Rodrigues, A.; Vieira, P. Realistic mobility modeling of pedestrian traffic in wireless networks. In Proceedings of the 2011 IEEE EUROCON-International Conference on Computer as a Tool, Lisbon, Portugal, 27–29 April 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–4. [Google Scholar]
- Elliott, D.; Keen, W.; Miao, L. Recent advances in connected and automated vehicles. J. Traffic Transp. Eng. 2019, 6, 109–131. [Google Scholar] [CrossRef]
- Bajpai, J.N. Emerging vehicle technologies & the search for urban mobility solutions. Urban Plan. Transp. Res. 2016, 4, 83–100. [Google Scholar]
- Wang, N.; Qiao, Y.; Wang, W.; Tang, S.; Shen, J. Visible Light Communication based Intelligent Traffic Light System: Designing and Implementation. In Proceedings of the 2018 Asia Communications and Photonics Conference (ACP), Hangzhou, China, 26–29 October 2018. [Google Scholar] [CrossRef]
- Cheng, N.; Lyu, F.; Chen, J.; Xu, W.; Zhou, H.; Zhang, S.; Shen, X. Big data driven vehicular networks. IEEE Netw. 2018, 32, 160–167. [Google Scholar] [CrossRef]
- Singh, P.; Singh, G.; Singh, A. Implementing Visible Light Communication in intelligent traffic management to resolve traffic logjams. Int. J. Comput. Eng. Res. 2015, 5, 1–5. [Google Scholar]
- Oskarbski, J.; Guminska, L.; Miszewski, M.; Oskarbska, I. Analysis of Signalized Intersections in the Context of Pedestrian Traffic. Transp. Res. Procedia 2016, 14, 2138–2147. [Google Scholar] [CrossRef]
- Han, G.; Zheng, Q.; Liao, L.; Tang, P.; Li, Z.; Zhu, Y. Deep Reinforcement Learning for Intersection Signal Control Considering Pedestrian Behavior. Electronics 2022, 11, 3519. [Google Scholar] [CrossRef]
- Fruin, J.J. Designing for Pedestrians a Level of Service Concept; Polytechnic University: Kowloon, China, 1970. [Google Scholar]
- Eskandarian, A.; Chaoxian, W.; Chuanyang, S. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. J. IEEE Trans. Intell. Transp. Syst. 2021, 22, 683–711. [Google Scholar] [CrossRef]
- Pribyl, O.; Pribyl, P.; Lom, M.; Svitek, M. Modeling of smart cities based on ITS architecture. IEEE Intell. Transp. Syst. Mag. 2019, 11, 28–36. [Google Scholar] [CrossRef]
- Miucic, R. Connected Vehicles: Intelligent Transportation Systems; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Yousefpour, A.; Fung, C.; Nguyen, T.; Kadiyala, K.; Jalali, F.; Niakanlahiji, A.; Kong, J.; Jue, J.P. All one needs to know about fog computing and related edge computing paradigms: A complete survey. J. Syst. Archit. 2019, 98, 289–330. [Google Scholar] [CrossRef]
- Galvão, G.; Vieira, M.; Louro, P.; Vieira, M.A.; Véstias, M.; Vieira, P. Visible Light Communication at Urban Intersections to Improve Traffic Signaling and Cooperative Trajectories. In Proceedings of the 2023 7th International Young Engineers Forum (YEF-ECE), Caparica/Lisbon, Portugal, 7 July 2023; pp. 60–65. [Google Scholar] [CrossRef]
- Vieira, M.A.; Vieira, M.; Louro, P.; Vieira, P.; Fantoni, A. Vehicular Visible Light Communication for Intersection Management. Spec. Issue Adv. Wirel. Sens. Netw. Signal Process. Signals 2023, 4, 457–477. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, F.Y.; Wang, K.; Lin, W.H.; Xu, X.; Chen, C. Data-driven intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Vieira, M.A.; Galvão, G.; Vieira, M.; Louro, P.; Vestias, M.; Vieira, P. Enhancing Urban Intersection Efficiency: Visible Light Communication and Learning-Based Control for Traffic Signal Optimization and Vehicle Management. Symmetry 2024, 16, 240. [Google Scholar] [CrossRef]
- Elbaum, Y.; Novoselsky, A.; Kagan, E. A Queueing Model for Traffic Flow Control in the Road Intersection. Mathematics 2022, 10, 3997. [Google Scholar] [CrossRef]
- Antonio, G.-P.; Maria-Dolores, C. AIM5LA: A Latency-Aware Deep Reinforcement Learning-Based Autonomous Intersection Management System for 5G Communication Networks. Sensors 2022, 22, 2217. [Google Scholar] [CrossRef]
- Shi, Y.; Liu, Y.; Qi, Y.; Han, Q. A Control Method with Reinforcement Learning for Urban Un-Signalized Intersection in Hybrid Traffic Environment. Sensors 2022, 22, 779. [Google Scholar] [CrossRef]
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement learning: A survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar] [CrossRef]
- Shokrolah Shirazi, M.; Chang, H.-F.; Tayeb, S. Turning Movement Count Data Integration Methods for Intersection Analysis and Traffic Signal Design. Sensors 2022, 22, 7111. [Google Scholar] [CrossRef] [PubMed]
- Genders, W.; Razavi, S. Using a deep reinforcement learning agent for traffic signal control. arXiv 2016, arXiv:1611.01142. [Google Scholar]
- Vidali, A.; Crociani, L.; Vizzari, G.; Bandini, S. A Deep Reinforcement Learning Approach to Adaptive Traffic Lights Management. In Proceedings of the WOA 2019, the 20th Workshop “From Objects to Agents”, Parma, Italy, 26–28 June 2019; pp. 42–50. [Google Scholar]
- Kővári, B.; Tettamanti, T.; Bécsi, T. Deep Reinforcement Learning based approach for Traffic Signal Control. Transp. Res. Procedia 2022, 62, 278–285. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wiessner, E. Microscopic traffic simulation using sumo. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- Touhbi, S.; Babram, M.A.; Nguyen-Huu, T.; Marilleau, N.; Hbid, M.L.; Cambier, C.; Stinckwich, S. Adaptive traffic signal control: Exploring reward definition for reinforcement learning. Procedia Comput. Sci. 2017, 109, 513–520. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| COM | Position | ID (veic) | Time | Payload | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L2V | Sync | 1 | x | y | 0 bits | END | Hour | Min | Sec | EOF | ||||
| V2V | Sync | 2 | x | y | Lane (0–7) | Veic. (nr) | END | Hour | Min | Sec | Car IDx | Car IDy | nr behind | EOF |
| V2I | Sync | 3 | x | y | TL (0–15) | Veic. (nr). | END | Hour | Min | Sec | Car IDx | Car IDy | nr behind | EOF |
| I2V | Sync | 4 | x | y | TL (0–15) | ID Veic. | END | Hour | Min | Sec | Car IDx | Car IDy | nr behind | EOF |
| P2I | Sync | 5 | x | y | TL (0–15) | Direct. | END | Hour | Min | Sec | EOF | |||
| I2P | Sync | 6 | x | y | TL (0–15) | Phase | END | Hour | Min | Sec | EOF | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vieira, M.; Vieira, M.A.; Galvão, G.; Louro, P.; Véstias, M.; Vieira, P. Enhancing Urban Intersection Efficiency: Utilizing Visible Light Communication and Learning-Driven Control for Improved Traffic Signal Performance. Vehicles 2024, 6, 666-692. https://doi.org/10.3390/vehicles6020031
Vieira M, Vieira MA, Galvão G, Louro P, Véstias M, Vieira P. Enhancing Urban Intersection Efficiency: Utilizing Visible Light Communication and Learning-Driven Control for Improved Traffic Signal Performance. Vehicles. 2024; 6(2):666-692. https://doi.org/10.3390/vehicles6020031
Chicago/Turabian StyleVieira, Manuela, Manuel Augusto Vieira, Gonçalo Galvão, Paula Louro, Mário Véstias, and Pedro Vieira. 2024. "Enhancing Urban Intersection Efficiency: Utilizing Visible Light Communication and Learning-Driven Control for Improved Traffic Signal Performance" Vehicles 6, no. 2: 666-692. https://doi.org/10.3390/vehicles6020031
APA StyleVieira, M., Vieira, M. A., Galvão, G., Louro, P., Véstias, M., & Vieira, P. (2024). Enhancing Urban Intersection Efficiency: Utilizing Visible Light Communication and Learning-Driven Control for Improved Traffic Signal Performance. Vehicles, 6(2), 666-692. https://doi.org/10.3390/vehicles6020031