

A Perspective on Prosthetic Hands Control: From the Brain to the Hand

Abstract
:1. Introduction
2. Prosthetic Hands Control
- The type and quality of the input and output signals, which determine the information content and fidelity of the control system;
- The complexity and robustness of the signal processing algorithms, which affect the accuracy and reliability of the control commands;
- The usability and acceptability of the user interface devices, which influence the comfort and satisfaction of the users.
3. Current Commercial Prosthetic Hands and Their Limitations
4. Needs of Upper Limb Prosthesis Users
5. The Brain as Inspiration
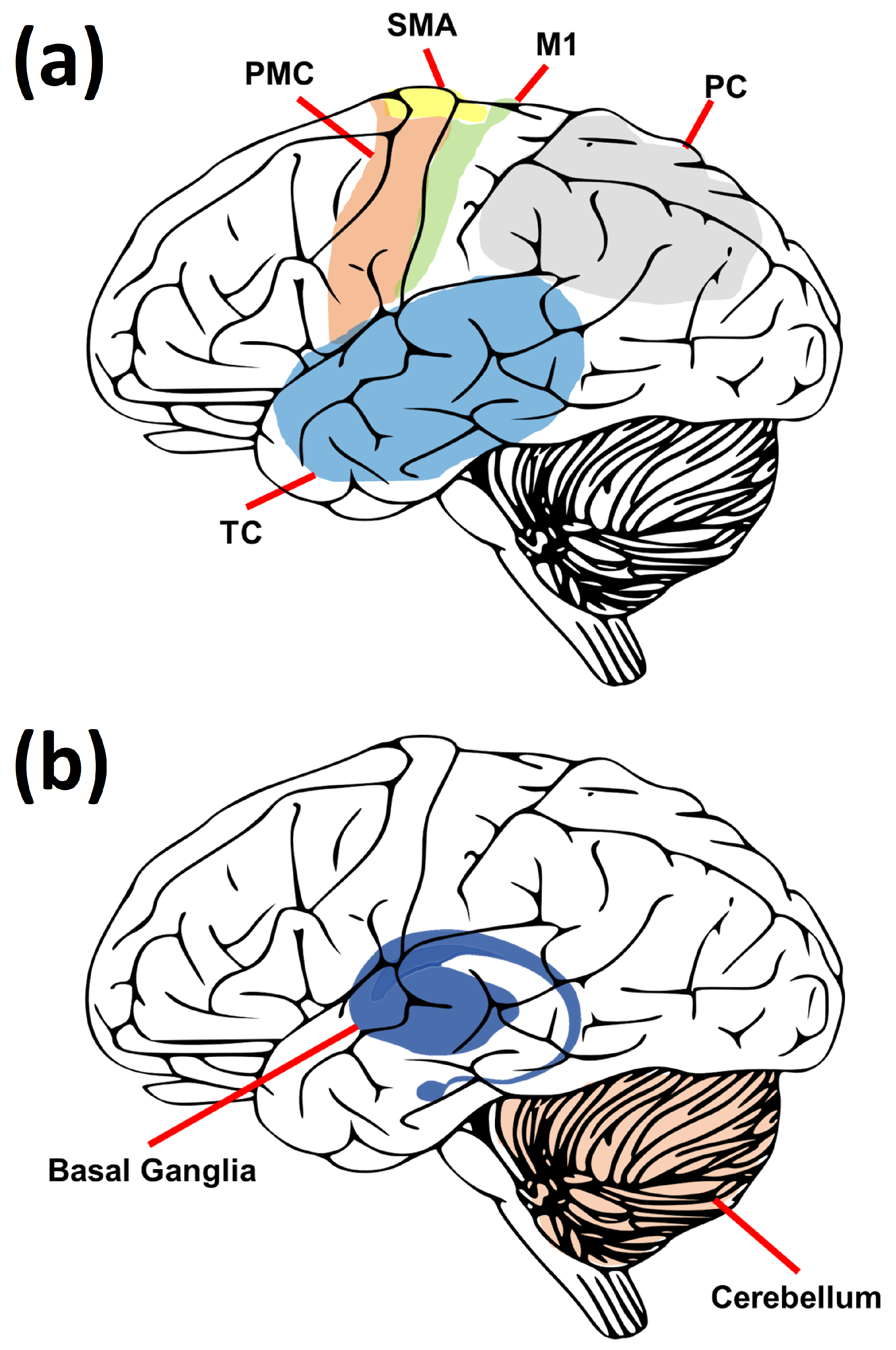
5.1. Brain Regions for Hand Control
5.2. Brain Pathways for Hand Control
5.3. Brain Mechanisms for Sensory Integration
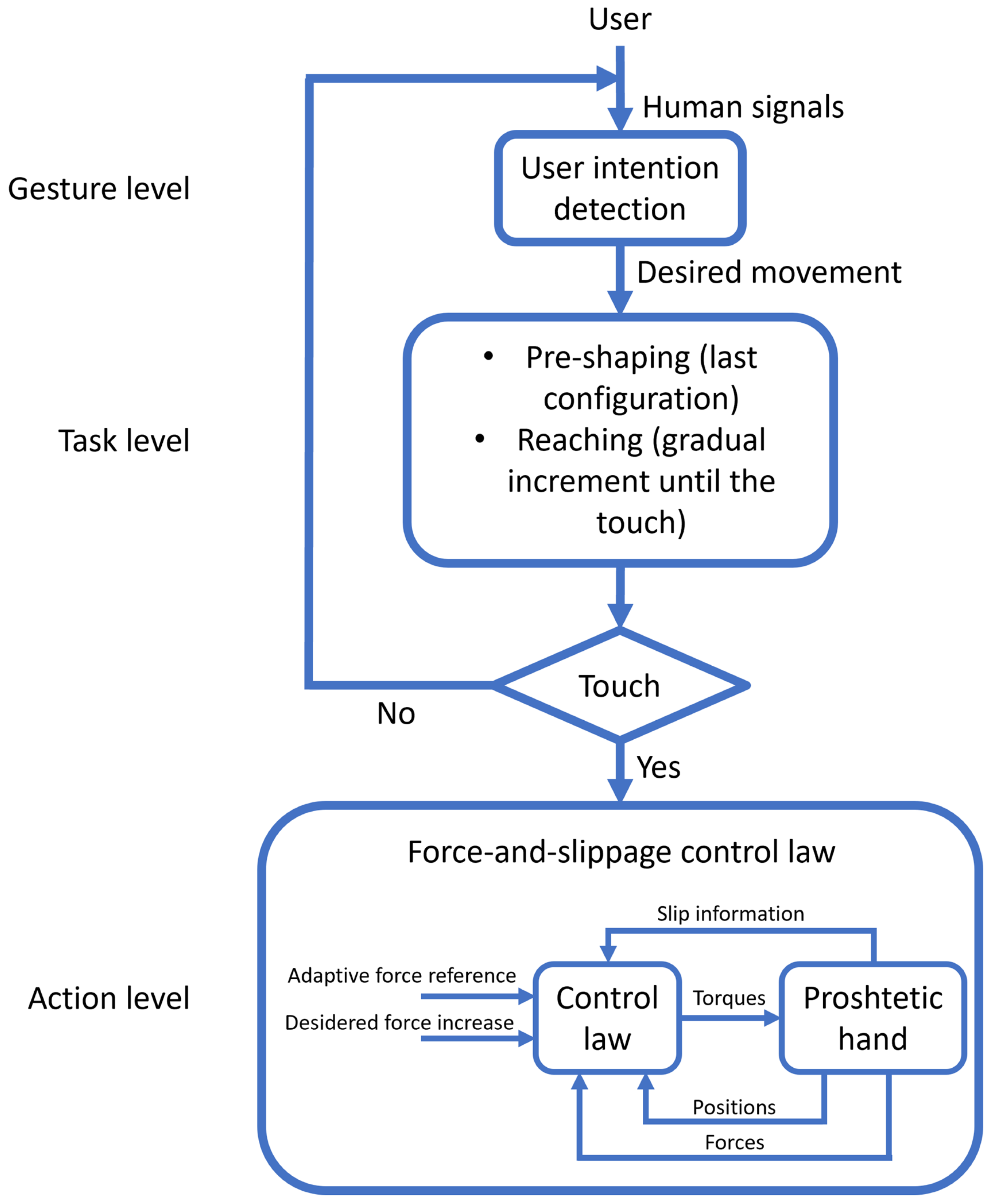
6. Hierarchical Control Strategies for Prosthetic Hands
7. Control Synergies
8. Artificial Intelligence (AI): Mimicking the Human Brain to Support Prosthetic Hand Control
- Deep learning models, including convolutional neural networks (CNNs), recurrent neural networks (RNNs), long short-term memory (LSTM) networks, generative adversarial networks (GANs), vision transformers, and temporal convolutional networks (TCNs), can automatically extract features and accurately classify sEMG signals for various hand movements and grasp types, eliminating the need for manual feature engineering [134,135]. Furthermore, these models can leverage multimodal signals, such as sEMG, EE, and nerve interface, to achieve more natural and intuitive control of prosthetic limbs [136].
- Continuous learning techniques, such as adversarial and sparsity prior learning, update the sEMG-based control system while preserving previous knowledge [137]. To address the variability and nonstationarity of sEMG signals caused by fatigue, sweat, electrode displacement, and arm position, certain techniques can be employed to assist the sEMG-based control system. These techniques can further adapt to user preferences and feedback, refining the control model [138].
- Incremental learning techniques like online, transfer, and lifelong learning have been utilized to enhance the sEMG-based control system with new knowledge and skills, without the need to retrain the entire model from the beginning [139]. By utilizing techniques that adapt successful models from previous subjects, the training time and effort required to control an upper limb prosthesis can be reduced. Additionally, these techniques can allow the user to learn new gestures or movements with the prosthetic hand without interfering with pre-existing ones [138,139].
9. Discussion, Opportunities, and Open Issues
- sEMG signals are nonstationary and can vary due to physiological and environmental factors like fatigue, sweat, electrode displacement, and arm position. Such changes can impact the signals’ amplitude, frequency, and morphology, thereby affecting the control system’s accuracy and stability [146,147]. Therefore, adaptive and robust methods are needed to cope with these changes.
- sEMG signals are susceptible to external interference, such as electromagnetic fields, power lines, and other biological signals. These interference signals may introduce noise and artefacts and degrade their quality and signal-to-noise ratio [96,138]. These interference signals may require filtering and denoising techniques to remove them.
- sEMG signals have limited resolution and provide incomplete information about hand movements. The signals produced by sEMG primarily indicate muscle activity and contraction, but they may not always correspond accurately to finger movements and kinematics [45,134]. Additionally, sEMG signals may also have a low spatial and temporal resolution, especially for fine and dexterous movements like grasping and manipulating objects [10,148]. These limitations may affect the functionality and performance of the control system and require feature extraction and enhancement techniques to improve them.
- The control system’s performance can be improved by using feature extraction and enhancement techniques on sEMG signals. However, the number and quality of sEMG sensors and electrodes may be limited, which can affect their ability to adequately cover and sample the signals. The sensors and electrodes may also be constrained by size, shape, placement, and contact, which can further impact spatial and temporal coverage and sampling [96,138]. The quality of sensors and electrodes can also affect signal acquisition and transmission [45]. These limitations may affect the overall usability and efficiency of the system.
- Standardization and validation of sEMG datasets and protocols are lacking, resulting in potential incomparability and irreproducibility between different studies and systems. Variations in data collection, preprocessing, segmentation, labelling, and evaluation, as well as user characteristics such as age, gender, health condition, and amputation level, can all impact the consistency and generalization of sEMG datasets and protocols [148].
- Implementing sEMG-based control systems in real time and online may be limited by the computational complexity and power consumption of machine learning and deep learning algorithms. Achieving good performance and accuracy with these algorithms may require high computational resources and training data [138]. The algorithms’ complexity and power consumption can affect the control system’s speed and efficiency, necessitating optimization and compression techniques to reduce them [148].
- Using sEMG-based control systems for prosthetic hands requires user training and adaptation, which can be challenging and time-consuming. The user needs to learn the gestures and motions that the control system can recognize and adjust the control parameters and feedback mechanisms to suit their preferences and needs [10,138]. These factors can affect the usability and comfort of the control system and demand user-friendly and personalized techniques to facilitate them [48,93].
- The ethical and social implications of using AI for prosthetic hand control may raise some concerns and challenges, such as privacy, security, accountability, and responsibility [149]. To control the prosthetic hand with AI, the system needs to collect and process sensitive and personal data from the users, such as their sEMG signals, hand movements, and preferences [150,151]. These data help the system to learn the users’ intentions and behaviors and to provide them with suitable feedback and control options [152]. However, this also means that the system may make decisions and actions that may affect the users’ health, safety, and well-being, such as moving the prosthetic hand in unexpected or harmful ways [153]. The ethical and social implications of using AI for prosthetic hand control may affect the trust and acceptance of the control system and require ethical and social guidelines and regulations to address them [154].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Napier, J.R. The prehensile movements of the human hand. J. Bone Jt. Surgery. Br. Vol. 1956, 38, 902–913. [Google Scholar] [CrossRef]
- Kyberd, P. Making Hands: A History of Prosthetic Arms; Academic Press: Cambridge, MA, USA, 2021. [Google Scholar]
- Balasubramanian, R.; Santos, V.J. The Human Hand as an Inspiration for Robot Hand Development; Springer: Berlin/Heidelberg, Germany, 2014; Volume 95. [Google Scholar]
- Maravita, A.; Iriki, A. Tools for the body (schema). Trends Cogn. Sci. 2004, 8, 79–86. [Google Scholar] [CrossRef]
- Culham, J.C.; Valyear, K.F. Human parietal cortex in action. Curr. Opin. Neurobiol. 2006, 16, 205–212. [Google Scholar] [CrossRef]
- Rizzolatti, G.; Sinigaglia, C. The functional role of the parieto-frontal mirror circuit: Interpretations and misinterpretations. Nat. Rev. Neurosci. 2010, 11, 264–274. [Google Scholar] [CrossRef]
- Zollo, L.; Rossini, L.; Bravi, M.; Magrone, G.; Sterzi, S.; Guglielmelli, E. Quantitative evaluation of upper-limb motor control in robot-aided rehabilitation. Med. Biol. Eng. Comput. 2011, 49, 1131–1144. [Google Scholar] [CrossRef]
- Ciancio, A.L.; Cordella, F.; Barone, R.; Romeo, R.A.; Dellacasa Bellingegni, A.; Sacchetti, R.; Davalli, A.; Di Pino, G.; Ranieri, F.; Di Lazzaro, V.; et al. Control of prosthetic hands via the peripheral nervous system. Front. Neurosci. 2016, 10, 116. [Google Scholar] [CrossRef]
- Zollo, L.; Roccella, S.; Guglielmelli, E.; Carrozza, M.C.; Dario, P. Biomechatronic design and control of an anthropomorphic artificial hand for prosthetic and robotic applications. IEEE/ASME Trans. Mechatronics 2007, 12, 418–429. [Google Scholar] [CrossRef]
- Castellini, C.; Artemiadis, P.; Wininger, M.; Ajoudani, A.; Alimusaj, M.; Bicchi, A.; Caputo, B.; Craelius, W.; Dosen, S.; Englehart, K.; et al. Proceedings of the first workshop on peripheral machine interfaces: Going beyond traditional surface electromyography. Front. Neurorobotics 2014, 8, 22. [Google Scholar] [CrossRef]
- Jensen, W. Natural sensory feedback for phantom limb pain modulation and therapy. In Converging Clinical and Engineering Research on Neurorehabilitation II: Proceedings of the 3rd International Conference on NeuroRehabilitation (ICNR2016), Segovia, Spain, 18–21 October 2016; Springer: Berlin/Heidelberg, Germany, 2017; pp. 719–723. [Google Scholar]
- Chen, Z.; Min, H.; Wang, D.; Xia, Z.; Sun, F.; Fang, B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics 2023, 8, 328. [Google Scholar] [CrossRef]
- Triwiyanto, T.; Rahmawati, T.; Pawana, I.P.A.; Lamidi, L.; Hamzah, T.; Pudji, A.; Mak’ruf, M.R.; Luthfiyah, S. State-of-the-art method in prosthetic hand design: A review. J. Biomimetics Biomater. Biomed. Eng. 2021, 50, 15–24. [Google Scholar] [CrossRef]
- Yang, B.; Jiang, L.; Ge, C.; Cheng, M.; Zhang, J. Control of myoelectric prosthetic hand with a novel proximity-tactile sensor. Sci. China Technol. Sci. 2022, 65, 1513–1523. [Google Scholar] [CrossRef]
- Dellacasa Bellingegni, A.; Gruppioni, E.; Colazzo, G.; Davalli, A.; Sacchetti, R.; Guglielmelli, W.; Zollo, L. NLR, MLP, SVM, and LDA: A comparative analysis on EMG data from people with trans-radial amputation. J. Neuroeng. Rehabil. 2017, 14, 82. [Google Scholar] [CrossRef]
- Park, S.H.; Lee, S.P. EMG pattern recognition based on artificial intelligence techniques. IEEE Trans. Rehabil. Eng. 1998, 6, 400–405. [Google Scholar] [CrossRef]
- Yang, D.; Zhao, J.; Gu, Y.; Jiang, L.; Liu, H. EMG pattern recognition and grasping force estimation: Improvement to the myocontrol of multi-DOF prosthetic hands. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 516–521. [Google Scholar]
- Maat, B.; Smit, G.; Plettenburg, D.; Breedveld, P. Passive prosthetic hands and tools: A literature review. Prosthetics Orthot. Int. 2018, 42, 66–74. [Google Scholar] [CrossRef]
- Chen, K.; Zhang, Y.; Zhang, Z.; Yang, Y.; Ye, H. Trans humeral prosthesis based on sEMG and SSVEP-EEG signals. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2665–2670. [Google Scholar]
- Saetta, G.; Cognolato, M.; Atzori, M.; Faccio, D.; Giacomino, K.; Mittaz Hager, A.G.; Tiengo, C.; Bassetto, F.; Müller, H.; Brugger, P. Gaze, behavioral, and clinical data for phantom limbs after hand amputation from 15 amputees and 29 controls. Sci. Data 2020, 7, 60. [Google Scholar] [CrossRef]
- Cheng, K.Y.; Rehani, M.; Hebert, J.S. A scoping review of eye tracking metrics used to assess visuomotor behaviours of upper limb prosthesis users. J. Neuroeng. Rehabil. 2023, 20, 49. [Google Scholar] [CrossRef]
- Skaramagkas, V.; Giannakakis, G.; Ktistakis, E.; Manousos, D.; Karatzanis, I.; Tachos, N.S.; Tripoliti, E.; Marias, K.; Fotiadis, D.I.; Tsiknakis, M. Review of eye tracking metrics involved in emotional and cognitive processes. IEEE Rev. Biomed. Eng. 2021, 16, 260–277. [Google Scholar] [CrossRef]
- Cognolato, M.; Gijsberts, A.; Gregori, V.; Saetta, G.; Giacomino, K.; Hager, A.G.M.; Gigli, A.; Faccio, D.; Tiengo, C.; Bassetto, F.; et al. Gaze, visual, myoelectric, and inertial data of grasps for intelligent prosthetics. Sci. Data 2020, 7, 43. [Google Scholar] [CrossRef]
- Hikosaka, O.; Takikawa, Y.; Kawagoe, R. Role of the basal ganglia in the control of purposive saccadic eye movements. Physiol. Rev. 2000, 80, 953–978. [Google Scholar] [CrossRef]
- Stephens-Fripp, B.; Alici, G.; Mutlu, R. A Review of Non-Invasive Sensory Feedback Methods for Transradial Prosthetic Hands. IEEE Access 2018, 6, 6878–6899. [Google Scholar] [CrossRef]
- Marinelli, A.; Boccardo, N.; Tessari, F.; Di Domenico, D.; Caserta, G.; Canepa, M.; Gini, G.; Barresi, G.; Laffranchi, M.; De Michieli, L.; et al. Active upper limb prostheses: A review on current state and upcoming breakthroughs. Prog. Biomed. Eng. 2022, 5, 012001. [Google Scholar] [CrossRef]
- Parr, J.V.V.; Wright, D.J.; Uiga, L.; Marshall, B.; Mohamed, M.O.; Wood, G. A scoping review of the application of motor learning principles to optimize myoelectric prosthetic hand control. Prosthetics Orthot. Int. 2022, 46, 274–281. [Google Scholar] [CrossRef]
- Wijk, U.; Carlsson, I.K.; Antfolk, C.; Björkman, A.; Rosén, B. Sensory Feedback in Hand Prostheses: A Prospective Study of Everyday Use. Front. Neurosci. 2020, 14, 663. [Google Scholar] [CrossRef]
- Jabban, L.; Dupan, S.; Zhang, D.; Ainsworth, B.; Nazarpour, K.; Metcalfe, B.W. Sensory feedback for upper-limb prostheses: Opportunities and barriers. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 738–747. [Google Scholar] [CrossRef]
- Roche, A.D.; Bailey, Z.K.; Gonzalez, M.; Vu, P.P.; Chestek, C.A.; Gates, D.H.; Kemp, S.W.; Cederna, P.S.; Ortiz-Catalan, M.; Aszmann, O.C. Upper limb prostheses: Bridging the sensory gap. J. Hand Surg. (Eur. Vol.) 2023, 48, 182–190. [Google Scholar] [CrossRef]
- Rodriguez-Cheu, L.E.; Casals, A. Sensing and control of a prosthetic hand with myoelectric feedback. In Proceedings of the The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, 2006. BioRob 2006, Pisa, Italy, 20–22 February 2006; pp. 607–612. [Google Scholar]
- Hamid, Q.; Hasan, W.W.; Hanim, M.A.; Nuraini, A.; Hamidon, M.; Ramli, H. Shape memory alloys actuated upper limb devices: A review. Sensors Actuators Rep. 2023, 5, 100160. [Google Scholar] [CrossRef]
- Bensmaia, S.J.; Tyler, D.J.; Micera, S. Restoration of sensory information via bionic hands. Nat. Biomed. Eng. 2023, 7, 443–455. [Google Scholar] [CrossRef]
- Sensinger, J.W.; Dosen, S. A Review of Sensory Feedback in Upper-Limb Prostheses From the Perspective of Human Motor Control. Front. Neurosci. 2020, 14, 345. [Google Scholar] [CrossRef]
- Guo, W.; Xu, W.; Zhao, Y.; Shi, X.; Sheng, X.; Zhu, X. Towards Human-in-the-Loop Shared Control for Upper-Limb Prostheses: A Systematic Analysis of State-of-the-Art Technologies. IEEE Trans. Med. Robot. Bionics 2023, 5, 563–579. [Google Scholar] [CrossRef]
- Svensson, P.; Malesevic, N.; Wijk, U.; Björkman, A.; Antfolk, C. The Rubber Hand Illusion evaluated using different stimulation modalities. Front. Neurosci. 2023, 17, 1237053. [Google Scholar] [CrossRef]
- Marinelli, A.; Boccardo, N.; Canepa, M.; Di Domenico, D.; Semprini, M.; Chiappalone, M.; Laffranchi, M.; De Michieli, L.; Dosen, S. A Novel Method for Vibrotactile Proprioceptive Feedback Using Spatial Encoding and Gaussian Interpolation. IEEE Trans. Biomed. Eng. 2023, 1–12. [Google Scholar] [CrossRef]
- Dey, A.; Basumatary, H.; Hazarika, S.M. A Decade of Haptic Feedback for Upper Limb Prostheses. IEEE Trans. Med. Robot. Bionics 2023, 5, 793–810. [Google Scholar] [CrossRef]
- Graziano, M. The organization of behavioral repertoire in motor cortex. Annu. Rev. Neurosci. 2006, 29, 105–134. [Google Scholar] [CrossRef]
- Andersen, R.A.; Cui, H. Intention, action planning, and decision making in parietal-frontal circuits. Neuron 2009, 63, 568–583. [Google Scholar] [CrossRef]
- Krakauer, J.W.; Mazzoni, P. Human sensorimotor learning: Adaptation, skill, and beyond. Curr. Opin. Neurobiol. 2011, 21, 636–644. [Google Scholar] [CrossRef]
- Dayan, E.; Cohen, L.G. Neuroplasticity subserving motor skill learning. Neuron 2011, 72, 443–454. [Google Scholar] [CrossRef]
- Biddiss, E.A.; Chau, T.T. Upper limb prosthesis use and abandonment: A survey of the last 25 years. Prosthetics Orthot. Int. 2007, 31, 236–257. [Google Scholar] [CrossRef]
- van der Riet, D.; Stopforth, R.; Bright, G.; Diegel, O. An overview and comparison of upper limb prosthetics. In Proceedings of the 2013 Africon, Pointe aux Piments, Mauritius, 9–12 September 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Luu, D.K.; Nguyen, A.T.; Jiang, M.; Drealan, M.W.; Xu, J.; Wu, T.; kin Tam, W.; Zhao, W.; Lim, B.Z.H.; Overstreet, C.K.; et al. Artificial Intelligence Enables Real-Time and Intuitive Control of Prostheses via Nerve Interface, 2022. arXiv 2022, arXiv:2203.08648. [Google Scholar]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of multifunctional prosthetic hands by processing the electromyographic signal. Crit. Rev. Biomed. Eng. 2002, 30, 459–485. [Google Scholar] [CrossRef]
- Kuiken, T.A.; Li, G.; Lock, B.A.; Lipschutz, R.D.; Miller, L.A.; Stubblefield, K.A.; Englehart, K.B. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA 2009, 301, 619–628. [Google Scholar] [CrossRef]
- Gentile, C.; Cordella, F.; Zollo, L. Hierarchical Human-Inspired Control Strategies for Prosthetic Hands. Sensors 2022, 22, 2521. [Google Scholar] [CrossRef]
- Jiang, N.; Dosen, S.; Muller, K.R.; Farina, D. Myoelectric control of artificial limbs—Is there a need to change focus? [In the spotlight]. IEEE Signal Process. Mag. 2012, 29, 150–152. [Google Scholar] [CrossRef]
- Cipriani, C.; Zaccone, F.; Micera, S.; Carrozza, M.C. On the shared control of an EMG-controlled prosthetic hand: Analysis of user–prosthesis interaction. IEEE Trans. Robot. 2008, 24, 170–184. [Google Scholar] [CrossRef]
- Jones, L.A.; Lederman, S.J. Human Hand Function; Oxford University Press: Oxford, UK, 2006. [Google Scholar]
- Raspopovic, S.; Capogrosso, M.; Petrini, F.M.; Bonizzato, M.; Rigosa, J.; Di Pino, G.; Carpaneto, J.; Controzzi, M.; Boretius, T.; Fernandez, E.; et al. Restoring natural sensory feedback in real-time bidirectional hand prostheses. Sci. Transl. Med. 2014, 6, 222ra19. [Google Scholar] [CrossRef]
- Zollo, L.; Di Pino, G.; Ciancio, A.L.; Ranieri, F.; Cordella, F.; Gentile, C.; Noce, E.; Romeo, E.A.; Dellacasa Bellingegni, A.; Vadalà, G.; et al. Restoring tactile sensations via neural interfaces for real-time force-and-slippage closed-loop control of bionic hands. Sci. Robot. 2019, 4, eaau9924. [Google Scholar] [CrossRef]
- Iberite, F.; Muheim, J.; Akouissi, O.; Gallo, S.; Rognini, G.; Morosato, F.; Clerc, A.; Kalff, M.; Gruppioni, E.; Micera, S.; et al. Restoration of natural thermal sensation in upper-limb amputees. Science 2023, 380, 731–735. [Google Scholar] [CrossRef]
- Cordella, F.; Gentile, C.; Zollo, L.; Barone, R.; Sacchetti, R.; Davalli, A.; Siciliano, B.; Guglielmelli, E. A force-and-slippage control strategy for a poliarticulated prosthetic hand. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3524–3529. [Google Scholar]
- Kyberd, P. Slip Detection Strategies for Automatic Grasping in Prosthetic Hands. Sensors 2023, 23, 4433. [Google Scholar] [CrossRef]
- Johansson, R.S.; Westling, G. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp. Brain Res. 1984, 56, 550–564. [Google Scholar] [CrossRef]
- Cordella, F.; Ciancio, A.L.; Sacchetti, R.; Davalli, A.; Cutti, A.G.; Guglielmelli, E.; Zollo, L. Literature review on needs of upper limb prosthesis users. Front. Neurosci. 2016, 10, 209. [Google Scholar] [CrossRef]
- Salvietti, G. Replicating human hand synergies onto robotic hands: A review on software and hardware strategies. Front. Neurorobotics 2018, 12, 27. [Google Scholar] [CrossRef]
- Jabban, L.; Metcalfe, B.W.; Raines, J.; Zhang, D.; Ainsworth, B. Experience of adults with upper-limb difference and their views on sensory feedback for prostheses: A mixed methods study. J. Neuroeng. Rehabil. 2022, 19, 80. [Google Scholar] [CrossRef]
- Clement, R.; Bugler, K.E.; Oliver, C.W. Bionic prosthetic hands: A review of present technology and future aspirations. Surgeon 2011, 9, 336–340. [Google Scholar] [CrossRef]
- Fougner, A.; Stavdahl, Ø.; Kyberd, P.J.; Losier, Y.G.; Parker, P.A. Control of upper limb prostheses: Terminology and proportional myoelectric control—A review. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 663–677. [Google Scholar] [CrossRef]
- Dollar, A.M.; Howe, R.D. The highly adaptive SDM hand: Design and performance evaluation. Int. J. Robot. Res. 2010, 29, 585–597. [Google Scholar] [CrossRef]
- Ansuini, C.; Santello, M.; Massaccesi, S.; Castiello, U. Effects of end-goal on hand shaping. J. Neurophysiol. 2006, 95, 2456–2465. [Google Scholar] [CrossRef]
- Todorov, E. Optimality principles in sensorimotor control. Nat. Neurosci. 2004, 7, 907–915. [Google Scholar] [CrossRef]
- Husain, M. Neural control of hand movement. Brain 2022, 145, 1191–1192. [Google Scholar] [CrossRef]
- Areas of the Brain Involved in Movement—Psychology Info. Available online: https://psychology-info.com/areas-of-the-brain-involved-inmovement (accessed on 4 July 2023).
- Tanji, J.; Shima, K. Role for supplementary motor area cells in planning several movements ahead. Nature 1994, 371, 413–416. [Google Scholar] [CrossRef]
- Sowden, S.; Catmur, C. The role of the right temporoparietal junction in the control of imitation. Cereb. Cortex 2015, 25, 1107–1113. [Google Scholar] [CrossRef]
- Doyon, J.; Bellec, P.; Amsel, R.; Penhune, V.; Monchi, O.; Carrier, J.; Lehéricy, S.; Benali, H. Contributions of the basal ganglia and functionally related brain structures to motor learning. Behav. Brain Res. 2009, 199, 61–75. [Google Scholar] [CrossRef]
- Graybiel, A.M. The basal ganglia and chunking of action repertoires. Neurobiol. Learn. Mem. 1998, 70, 119–136. [Google Scholar] [CrossRef]
- Thach, W.T.; Goodkin, H.; Keating, J. The cerebellum and the adaptive coordination of movement. Annu. Rev. Neurosci. 1992, 15, 403–442. [Google Scholar] [CrossRef]
- Alexander, G.E.; DeLong, M.R.; Strick, P.L. Parallel organization of functionally segregated circuits linking basal ganglia and cortex. Annu. Rev. Neurosci. 1986, 9, 357–381. [Google Scholar] [CrossRef]
- Porter, R.; Lemon, R. Corticospinal Function and Voluntary Movement; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Rossini, P.M.; Burke, D.; Chen, R.; Cohen, L.G.; Daskalakis, Z.; Di Iorio, R.; Di Lazzaro, V.; Ferreri, F.; Fitzgerald, P.; George, M.S.; et al. Non-invasive electrical and magnetic stimulation of the brain, spinal cord, roots and peripheral nerves: Basic principles and procedures for routine clinical and research application. An updated report from an IFCN Committee. Clin. Neurophysiol. 2015, 126, 1071–1107. [Google Scholar] [CrossRef]
- Rizzolatti, G.; Craighero, L. The mirror-neuron system. Annu. Rev. Neurosci. 2004, 27, 169–192. [Google Scholar] [CrossRef]
- Catani, M.; De Schotten, M.T. A diffusion tensor imaging tractography atlas for virtual in vivo dissections. Cortex 2008, 44, 1105–1132. [Google Scholar] [CrossRef]
- Makris, N.; Angelone, L.; Tulloch, S.; Sorg, S.; Kaiser, J.; Kennedy, D.; Bonmassar, G. MRI-based anatomical model of the human head for specific absorption rate mapping. Med. Biol. Eng. Comput. 2008, 46, 1239–1251. [Google Scholar] [CrossRef]
- Kaas, J.H.; Pons, T. The Somatosensory System of Primates. In Comparative Primate Biology, Neurosciences; Steklis, H.D., Erwin, J., Eds.; Alan R. Liss, Inc.: New York, NY, USA, 1986; pp. 421–468. [Google Scholar]
- Willis, W., Jr. Pain pathways in the primate. Prog. Clin. Biol. Res. 1985, 176, 117–133. [Google Scholar]
- Melzack, R.; Wall, P.D. Pain Mechanisms: A New Theory: A gate control system modulates sensory input from the skin before it evokes pain perception and response. Science 1965, 150, 971–979. [Google Scholar] [CrossRef]
- D’angelo, E.; Mazzarello, P.; Prestori, F.; Mapelli, J.; Solinas, S.; Lombardo, P.; Cesana, E.; Gandolfi, D.; Congi, L. The cerebellar network: From structure to function and dynamics. Brain Res. Rev. 2011, 66, 5–15. [Google Scholar] [CrossRef]
- Bolognini, N.; Maravita, A. Uncovering multisensory processing through non-invasive brain stimulation. Front. Psychol. 2011, 2, 46. [Google Scholar] [CrossRef]
- Edwards, L.L.; King, E.M.; Buetefisch, C.M.; Borich, M.R. Putting the “sensory” into sensorimotor control: The role of sensorimotor integration in goal-directed hand movements after stroke. Front. Integr. Neurosci. 2019, 13, 16. [Google Scholar] [CrossRef]
- Stein, B.E.; Stanford, T.R. Multisensory integration: Current issues from the perspective of the single neuron. Nat. Rev. Neurosci. 2008, 9, 255–266. [Google Scholar] [CrossRef]
- Stein, B.E.; Stanford, T.R.; Rowland, B.A. The neural basis of multisensory integration in the midbrain: Its organization and maturation. Hear. Res. 2009, 258, 4–15. [Google Scholar] [CrossRef]
- Binkofski, F.; Fink, G.R.; Geyer, S.; Buccino, G.; Gruber, O.; Shah, N.J.; Taylor, J.G.; Seitz, R.J.; Zilles, K.; Freund, H.J. Neural activity in human primary motor cortex areas 4a and 4p is modulated differentially by attention to action. J. Neurophysiol. 2002, 88, 514–519. [Google Scholar] [CrossRef]
- Nitschke, M.; Arp, T.; Stavrou, G.; Erdmann, C.; Heide, W. The cerebellum in the cerebro-cerebellar network for the control of eye and hand movements—An fMRI study. Prog. Brain Res. 2005, 148, 151–164. [Google Scholar] [PubMed]
- Nightingale, J.; Sedgewick, E.M. Control of Movement via Skeletal Muscles. 1979. Available online: https://pascal-francis.inist.fr/vibad/index.php?action=getRecordDetail&idt=PASCAL8050160739 (accessed on 3 March 2023).
- Nightingale, J.M. Microprocessor control of an artificial arm. J. Microcomput. Appl. 1985, 8, 167–173. [Google Scholar] [CrossRef]
- Wolpert, D.M.; Kawato, M. Multiple paired forward and inverse models for motor control. Neural Netw. 1998, 11, 1317–1329. [Google Scholar] [CrossRef]
- Körding, K.P.; Wolpert, D.M. Bayesian integration in sensorimotor learning. Nature 2004, 427, 244–247. [Google Scholar] [CrossRef]
- Seminara, L.; Dosen, S.; Mastrogiovanni, F.; Bianchi, M.; Watt, S.; Beckerle, P.; Nanayakkara, T.; Drewing, K.; Moscatelli, A.; Klatzky, R.L.; et al. A hierarchical sensorimotor control framework for human-in-the-loop robotic hands. Sci. Robot. 2023, 8, eadd5434. [Google Scholar] [CrossRef]
- Jeannerod, M.; Arbib, M.A.; Rizzolatti, G.; Sakata, H. Grasping objects: The cortical mechanisms of visuomotor transformation. Trends Neurosci. 1995, 18, 314–320. [Google Scholar] [CrossRef]
- Desmurget, M.; Grafton, S. Forward modeling allows feedback control for fast reaching movements. Trends Cogn. Sci. 2000, 4, 423–431. [Google Scholar] [CrossRef]
- Castellini, C.; Van Der Smagt, P. Surface EMG in advanced hand prosthetics. Biol. Cybern. 2009, 100, 35–47. [Google Scholar] [CrossRef]
- Rosenbaum, D.A.; Meulenbroek, R.J.; Vaughan, J.; Jansen, C. Posture-based motion planning: Applications to grasping. Psychol. Rev. 2001, 108, 709. [Google Scholar] [CrossRef]
- Gentilucci, M.; Benuzzi, F.; Bertolani, L.; Daprati, E.; Gangitano, M. Language and motor control. Exp. Brain Res. 2000, 133, 468–490. [Google Scholar] [CrossRef]
- Castiello, U. The neuroscience of grasping. Nat. Rev. Neurosci. 2005, 6, 726. [Google Scholar] [CrossRef]
- Becchio, C.; Sartori, L.; Castiello, U. Toward you: The social side of actions. Curr. Dir. Psychol. Sci. 2010, 19, 183–188. [Google Scholar] [CrossRef]
- Noce, E.; Gentile, C.; Cordella, F.; Ciancio, A.; Piemonte, V.; Zollo, L. Grasp control of a prosthetic hand through peripheral neural signals. J. Physics: Conf. Ser. 2018, 1026, 012006. [Google Scholar] [CrossRef]
- Leone, F.; Gentile, C.; Ciancio, A.L.; Gruppioni, E.; Davalli, A.; Sacchetti, R.; Guglielmelli, E.; Zollo, L. Simultaneous sEMG classification of wrist/hand gestures and forces. Front. Neurorobotics 2019, 13, 42. [Google Scholar] [CrossRef]
- Hochberg, L.R.; Bacher, D.; Jarosiewicz, B.; Masse, N.Y.; Simeral, J.D.; Vogel, J.; Haddadin, S.; Liu, J.; Cash, S.S.; Van Der Smagt, P.; et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature 2012, 485, 372–375. [Google Scholar] [CrossRef]
- Jeannerod, M. The timing of natural prehension movements. J. Mot. Behav. 1984, 16, 235–254. [Google Scholar] [CrossRef]
- Rosenbaum, D.A.; Cohen, R.G.; Jax, S.A.; Weiss, D.J.; Van Der Wel, R. The problem of serial order in behavior: Lashley’s legacy. Hum. Mov. Sci. 2007, 26, 525–554. [Google Scholar] [CrossRef]
- Goodale, M.A.; Milner, A.D. Separate visual pathways for perception and action. Trends Neurosci. 1992, 15, 20–25. [Google Scholar] [CrossRef]
- Johansson, R.S.; Flanagan, J.R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci. 2009, 10, 345. [Google Scholar] [CrossRef]
- Kober, J.; Peters, J. Policy search for motor primitives in robotics. In Advances in Neural Information Processing Systems; Curran: Red Hook, NY, USA, 2008. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Bizzi, E.; Cheung, V.C. The neural origin of muscle synergies. Front. Comput. Neurosci. 2013, 7, 51. [Google Scholar] [CrossRef]
- Scott, S.H. Optimal feedback control and the neural basis of volitional motor control. Nat. Rev. Neurosci. 2004, 5, 532–545. [Google Scholar] [CrossRef]
- Romeo, R.A.; Oddo, C.; Carrozza, M.C.; Guglielmelli, E.; Zollo, L. Slippage detection with piezoresistive tactile sensors. Sensors 2017, 17, 1844. [Google Scholar] [CrossRef]
- Stefanelli, E.; Cordella, F.; Gentile, C.; Zollo, L. Hand Prosthesis Sensorimotor Control Inspired by the Human Somatosensory System. Robotics 2023, 12, 136. [Google Scholar] [CrossRef]
- Hogan, N.; Sternad, D. Sensitivity of smoothness measures to movement duration, amplitude, and arrests. J. Mot. Behav. 2009, 41, 529–534. [Google Scholar] [CrossRef]
- Mussa-Ivaldi, F.A.; Bizzi, E. Motor learning through the combination of primitives. Philos. Trans. R. Soc. London. Ser. Biol. Sci. 2000, 355, 1755–1769. [Google Scholar] [CrossRef]
- Cutkosky, M.R. On grasp choice, grasp models, and the design of hands for manufacturing tasks. IEEE Trans. Robot. Autom. 1989, 5, 269–279. [Google Scholar] [CrossRef]
- Santello, M.; Flanders, M.; Soechting, J.F. Postural hand synergies for tool use. J. Neurosci. 1998, 18, 10105–10115. [Google Scholar] [CrossRef]
- Shadmehr, R.; Mussa-Ivaldi, F.A. Adaptive representation of dynamics during learning of a motor task. J. Neurosci. 1994, 14, 3208–3224. [Google Scholar] [CrossRef]
- Wolpert, D.M.; Ghahramani, Z.; Jordan, M.I. An internal model for sensorimotor integration. Science 1995, 269, 1880–1882. [Google Scholar] [CrossRef]
- Santello, M.; Bianchi, M.; Gabiccini, M.; Ricciardi, E.; Salvietti, G.; Prattichizzo, D.; Ernst, M.; Moscatelli, A.; Jörntell, H.; Kappers, A.M.; et al. Hand synergies: Integration of robotics and neuroscience for understanding the control of biological and artificial hands. Phys. Life Rev. 2016, 17, 1–23. [Google Scholar] [CrossRef]
- Bernstein, N. The Co-Ordination and Regulation of Movements; Pergamo Press: London, UK, 1967. [Google Scholar]
- Grioli, G.; Wolf, S.; Garabini, M.; Catalano, M.; Burdet, E.; Caldwell, D.; Carloni, R.; Friedl, W.; Grebenstein, M.; Laffranchi, M.; et al. Variable stiffness actuators: The user’s point of view. Int. J. Robot. Res. 2015, 34, 727–743. [Google Scholar] [CrossRef]
- Micera, S.; Citi, L.; Rigosa, J.; Carpaneto, J.; Raspopovic, S.; Di Pino, G.; Rossini, L.; Yoshida, K.; Denaro, L.; Dario, P.; et al. Decoding information from neural signals recorded using intraneural electrodes: Toward the development of a neurocontrolled hand prosthesis. Proc. IEEE 2010, 98, 407–417. [Google Scholar] [CrossRef]
- Meattini, R.; Benatti, S.; Scarcia, U.; De Gregorio, D.; Benini, L.; Melchiorri, C. An sEMG-based human-robot interface for robotic hands using machine learning and synergies. IEEE Trans. Components, Packag. Manuf. Technol. 2018, 8, 1149–1158. [Google Scholar] [CrossRef]
- Carrozza, M.C.; Suppo, C.; Sebastiani, F.; Massa, B.; Vecchi, F.; Lazzarini, R.; Cutkosky, M.R.; Dario, P. The SPRING hand: Development of a self-adaptive prosthesis for restoring natural grasping. Auton. Robot. 2004, 16, 125–141. [Google Scholar] [CrossRef]
- Controzzi, M.; Cipriani, C.; Jehenne, B.; Donati, M.; Carrozza, M.C. Bio-inspired mechanical design of a tendon-driven dexterous prosthetic hand. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 499–502. [Google Scholar]
- Ajoudani, A.; Godfrey, S.B.; Bianchi, M.; Catalano, M.G.; Grioli, G.; Tsagarakis, N.; Bicchi, A. Exploring teleimpedance and tactile feedback for intuitive control of the pisa/iit softhand. IEEE Trans. Haptics 2014, 7, 203–215. [Google Scholar] [CrossRef]
- Santello, M.; Soechting, J.F. Gradual molding of the hand to object contours. J. Neurophysiol. 1998, 79, 1307–1320. [Google Scholar] [CrossRef]
- Abu-Dakka, F.J.; Saveriano, M. Variable impedance control and learning—A review. Front. Robot. 2020, 7, 590681. [Google Scholar] [CrossRef]
- Ajoudani, A.; Tsagarakis, N.G.; Bicchi, A. Tele-impedance: Preliminary results on measuring and replicating human arm impedance in tele operated robots. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 216–222. [Google Scholar]
- Meattini, R.; Suárez, R.; Palli, G.; Melchiorri, C. Human to Robot Hand Motion Mapping Methods: Review and Classification. IEEE Trans. Robot. 2022, 39, 842–861. [Google Scholar] [CrossRef]
- Meattini, R.; Benatti, S.; Scarcia, U.; Benini, L.; Melchiorri, C. Experimental evaluation of a sEMG-based human-robot interface for human-like grasping tasks. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 1030–1035. [Google Scholar]
- Meattini, R.; Chiaravalli, D.; Palli, G.; Melchiorri, C. sEMG-based human-in-the-loop control of elbow assistive robots for physical tasks and muscle strength training. IEEE Robot. Autom. Lett. 2020, 5, 5795–5802. [Google Scholar] [CrossRef]
- Jafarzadeh, M.; Hussey, D.C.; Tadesse, Y. Deep learning approach to control of prosthetic hands with electromyography signals. In Proceedings of the 2019 IEEE International Symposium on Measurement and Control in Robotics (ISMCR), Houston, TX, USA, 19–21 September 2019. [Google Scholar] [CrossRef]
- Cognolato, M.; Atzori, M.; Gassert, R.; Müller, H. Improving Robotic Hand Prosthesis Control With Eye Tracking and Computer Vision: A Multimodal Approach Based on the Visuomotor Behavior of Grasping. Front. Artif. Intell. 2022, 4, 744476. [Google Scholar] [CrossRef]
- Rasouli, M.; Ghosh, R.; Lee, W.W.; Thakor, N.V.; Kukreja, S. Stable force-myographic control of a prosthetic hand using incremental learning. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 4828–4831. [Google Scholar] [CrossRef]
- Kristoffersen, M.B.; Franzke, A.W.; Bongers, R.M.; Wand, M.; Murgia, A.; van der Sluis, C.K. User training for machine learning controlled upper limb prostheses: A serious game approach. J. Neuroeng. Rehabil. 2021, 18, 32. [Google Scholar] [CrossRef]
- Huang, Z.; Zheng, J.; Zhao, L.; Chen, H.; Jiang, X.; Zhang, X. DL-Net: Sparsity Prior Learning for Grasp Pattern Recognition. IEEE Access 2023, 11, 6444–6451. [Google Scholar] [CrossRef]
- Triwiyanto, T.; Maghfiroh, A.M.; Musvika, S.D.; Amrinsani, F.; Syaifudin; Mak’ruf, R.; Rachmat, N.; Caesarendra, W.; Sulowicz, M. State of the Art Methods of Machine Learning for Prosthetic Hand Development: A Review. In Proceedings of the 3rd International Conference on Electronics, Biomedical Engineering, and Health Informatics: ICEBEHI 2022, Surabaya, Indonesia, 5–6 October 2023; Springer: Berlin/Heidelberg, Germany, 2023; pp. 555–574. [Google Scholar]
- Bicchi, A. Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity. IEEE Trans. Robot. Autom. 2000, 16, 652–662. [Google Scholar] [CrossRef]
- Cullen, D.K.; Smith, D.H. How artificial arms could connect to the nervous system. Sci. Americian 2013, 14, 52–57. [Google Scholar]
- Freud, E.; Behrmann, M.; Snow, J.C. What does dorsal cortex contribute to perception? Open Mind 2020, 4, 40–56. [Google Scholar] [CrossRef]
- Georgopoulos, A.P.; Schwartz, A.B.; Kettner, R.E. Neuronal population coding of movement direction. Science 1986, 233, 1416–1419. [Google Scholar] [CrossRef]
- Righetti, L.; Ijspeert, A.J. Programmable central pattern generators: An application to biped locomotion control. In Proceedings of the Proceedings 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1585–1590. [Google Scholar]
- Velliste, M.; Perel, S.; Spalding, M.C.; Whitford, A.S.; Schwartz, A.B. Cortical control of a prosthetic arm for self-feeding. Nature 2008, 453, 1098–1101. [Google Scholar] [CrossRef]
- Yadav, D.; Veer, K. Recent trends and challenges of surface electromyography in prosthetic applications. Biomed. Eng. Lett. 2023, 13, 353–373. [Google Scholar] [CrossRef]
- Wang, S.; Zheng, J.; Huang, Z.; Zhang, X.; Prado da Fonseca, V.; Zheng, B.; Jiang, X. Integrating computer vision to prosthetic hand control with sEMG: Preliminary results in grasp classification. Front. Robot. 2022, 9, 948238. [Google Scholar] [CrossRef]
- Zhang, X.; Baun, K.S.; Trent, L.; Miguelez, J.M.; Kontson, K.L. Factors influencing perceived function in the upper limb prosthesis user population. PM&R 2023, 15, 69–79. [Google Scholar]
- Keskinbora, K.H. Medical ethics considerations on artificial intelligence. J. Clin. Neurosci. 2019, 64, 277–282. [Google Scholar] [CrossRef]
- Gordon, J.S. AI and law: Ethical, legal, and socio-political implications. AI Soc. 2021, 36, 403–404. [Google Scholar] [CrossRef]
- Weiner, P.; Starke, J.; Rader, S.; Hundhausen, F.; Asfour, T. Designing prosthetic hands with embodied intelligence: The kit prosthetic hands. Front. Neurorobotics 2022, 16, 815716. [Google Scholar] [CrossRef]
- Nayak, S.; Das, R.K. Application of artificial intelligence (AI) in prosthetic and orthotic rehabilitation. In Service Robotics; IntechOpen: Rijeka, Croatia, 2020. [Google Scholar]
- Stahl, B.C.; Stahl, B.C. Ethical issues of AI. In Artificial Intelligence for a Better Future: An Ecosystem Perspective on the Ethics of AI and Emerging Digital Technologies; Springer: Cham, Switzerland, 2021; pp. 35–53. [Google Scholar]
- Dignum, V. Ethics in artificial intelligence: Introduction to the special issue. Ethics Inf. Technol. 2018, 20, 1–3. [Google Scholar] [CrossRef]
- Li, W.; Shi, P.; Yu, H. Gesture Recognition Using Surface Electromyography and Deep Learning for Prostheses Hand: State-of-the-Art, Challenges, and Future. Front. Neurosci. 2021, 15, 621885. [Google Scholar] [CrossRef]
- Pfeiffer, B.E.; Foster, D.J. Hippocampal place-cell sequences depict future paths to remembered goals. Nature 2013, 497, 74–79. [Google Scholar] [CrossRef]
- Philpot, B.; Bear, M.; Abraham, W. Metaplasticity: The plasticity of synaptic plasticity. In Beyond Neurotransmission: Neuromodulation and Its Importance for Information Processing; Oxford University Press: Oxford, UK, 1999; pp. 160–197. [Google Scholar]
- Kolb, B.; Whishaw, I.Q. Brain plasticity and behavior. Annu. Rev. Psychol. 1998, 49, 43–64. [Google Scholar] [CrossRef]
- Walker, M.P.; Stickgold, R. Sleep-dependent learning and memory consolidation. Neuron 2004, 44, 121–133. [Google Scholar] [CrossRef]
- Hocaoglu, E.; Patoglu, V. sEMG-based natural control interface for a variable stiffness transradial hand prosthesis. Front. Neurorobotics 2022, 16, 789341. [Google Scholar] [CrossRef]
- McGaugh, J.L. Memory–a century of consolidation. Science 2000, 287, 248–251. [Google Scholar] [CrossRef]
- Parisi, G.I.; Kemker, R.; Part, J.L.; Kanan, C.; Wermter, S. Continual lifelong learning with neural networks: A review. Neural Netw. 2019, 113, 54–71. [Google Scholar] [CrossRef]
- Kumar, D.K.; Jelfs, B.; Sui, X.; Arjunan, S.P. Prosthetic hand control: A multidisciplinary review to identify strengths, shortcomings, and the future. Biomed. Signal Process. Control. 2019, 53, 101588. [Google Scholar] [CrossRef]
- Cognolato, M.; Graziani, M.; Giordaniello, F.; Saetta, G.; Bassetto, F.; Brugger, P.; Caputo, B.; Müller, H.; Atzori, M. Semi-automatic training of an object recognition system in scene camera data using gaze tracking and accelerometers. In Proceedings of the Computer Vision Systems: 11th International Conference, ICVS 2017, Shenzhen, China, 10–13 July 2017; Revised Selected Papers 11; Springer: Berlin/Heidelberg, Germany, 2017; pp. 175–184. [Google Scholar]
- McCloskey, M.; Cohen, N.J. Catastrophic interference in connectionist networks: The sequential learning problem. In Psychology of Learning and Motivation; Elsevier: Amsterdam, The Netherlands, 1989; Volume 24, pp. 109–165. [Google Scholar]
- Kolb, B.; Gibb, R.; Robinson, T.E. Brain plasticity and behavior. Curr. Dir. Psychol. Sci. 2003, 12, 1–5. [Google Scholar] [CrossRef]
- Azevedo, F.A.; Carvalho, L.R.; Grinberg, L.T.; Farfel, J.M.; Ferretti, R.E.; Leite, R.E.; Filho, W.J.; Lent, R.; Herculano-Houzel, S. Equal numbers of neuronal and nonneuronal cells make the human brain an isometrically scaled-up primate brain. J. Comp. Neurol. 2009, 513, 532–541. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Hassabis, D.; Kumaran, D.; Summerfield, C.; Botvinick, M. Neuroscience-inspired artificial intelligence. Neuron 2017, 95, 245–258. [Google Scholar] [CrossRef]
- Scott, D.N.; Frank, M.J. Adaptive control of synaptic plasticity integrates micro-and macroscopic network function. Neuropsychopharmacology 2023, 48, 121–144. [Google Scholar] [CrossRef]
- Kong, Y.; Liu, L.; Chen, H.; Kacprzyk, J.; Tao, D. Overcoming Catastrophic Forgetting in Continual Learning by Exploring Eigenvalues of Hessian Matrix. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–15. [Google Scholar] [CrossRef]
- Rebuffi, S.; Kolesnikov, A.; Sperl, G.; Lampert, C. iCaRL: Incremental classifier and representation learning. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5533–5542. [Google Scholar]
- Loeffler, A.; Diaz-Alvarez, A.; Zhu, R.; Ganesh, N.; Shine, J.M.; Nakayama, T.; Kuncic, Z. Neuromorphic learning, working memory, and metaplasticity in nanowire networks. Sci. Adv. 2023, 9, eadg3289. [Google Scholar] [CrossRef]
- Cipriani, C.; Antfolk, C.; Controzzi, M.; Lundborg, G.; Rosén, B.; Carrozza, M.C.; Sebelius, F. Online myoelectric control of a dexterous hand prosthesis by transradial amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 260–270. [Google Scholar] [CrossRef]
- Farina, D.; Vujaklija, I.; Sartori, M.; Kapelner, T.; Negro, F.; Jiang, N.; Bergmeister, K.; Andalib, A.; Principe, J.; Aszmann, O.C. Man/machine interface based on the discharge timings of spinal motor neurons after targeted muscle reinnervation. Nat. Biomed. Eng. 2017, 1, 0025. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Advantages | Disadvantages |
|---|---|---|
| EMG-based feedforward control | - Noninvasive and easy to use - Compatible with commercial prostheses - Can provide high accuracy and reliability | - Sensitive to noise and interference - Affected by muscle fatigue and electrode shift - Limited by the number and quality of EMG channels |
| EEG-based feedforward control | - Noninvasive and wireless - Can access brain signals directly - Can provide high flexibility and adaptability | - Sensitive to noise and artifacts - Affected by user concentration and mental state - Requires long training and calibration |
| Eye tracking-based feedforward control | - Noninvasive and intuitive - Can exploit natural visual attention - Can provide high speed and precision | - Sensitive to noise and occlusion - Affected by user fatigue and distraction - Requires accurate calibration and alignment |
| Residual limb motion-based feedforward control | - Noninvasive and natural - Can exploit residual motor skills - Can provide high dexterity and versatility | - Sensitive to noise and drift - Affected by user comfort and stability - Requires accurate mapping and scaling |
| Tactile feedback control | - Can enhance object manipulation skills - Can improve user confidence and satisfaction - Can reduce visual attention demand | - Can cause sensory overload or adaptation - Can be affected by user perception threshold - Can require invasive neural interfaces |
| Proprioceptive feedback control | - Can enhance hand posture awareness - Can improve user embodiment and agency - Can reduce cognitive load | - Can cause sensory mismatch or confusion - Can be affected by user adaptation level - Can require invasive neural interfaces |
| Auditory feedback control | - Can provide simple and intuitive cues - Can convey complex and abstract information - Can be easily integrated with other feedback modalities | - Can cause auditory fatigue or annoyance - Can interfere with environmental sounds - Can require user learning and memorization |
| Visual feedback control | - Can provide rich and realistic information - Can facilitate user learning and training - Can be easily integrated with other feedback modalities | - Can cause visual fatigue or distraction - Can interfere with natural vision - Can require additional devices or equipment |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gentile, C.; Gruppioni, E. A Perspective on Prosthetic Hands Control: From the Brain to the Hand. Prosthesis 2023, 5, 1184-1205. https://doi.org/10.3390/prosthesis5040083
Gentile C, Gruppioni E. A Perspective on Prosthetic Hands Control: From the Brain to the Hand. Prosthesis. 2023; 5(4):1184-1205. https://doi.org/10.3390/prosthesis5040083
Chicago/Turabian StyleGentile, Cosimo, and Emanuele Gruppioni. 2023. "A Perspective on Prosthetic Hands Control: From the Brain to the Hand" Prosthesis 5, no. 4: 1184-1205. https://doi.org/10.3390/prosthesis5040083
APA StyleGentile, C., & Gruppioni, E. (2023). A Perspective on Prosthetic Hands Control: From the Brain to the Hand. Prosthesis, 5(4), 1184-1205. https://doi.org/10.3390/prosthesis5040083