A LoRa-Based Linear Sensor Network for Location Data in Underground Mining




Abstract
:1. Introduction
- The system uses the LoRa physical layer because of its long range, low cost and ease of deployment. LoRa (from “Long Range”) is a low bit-rate proprietary technology from Semtech which we used to transmit messages to support repair or rescue efforts.
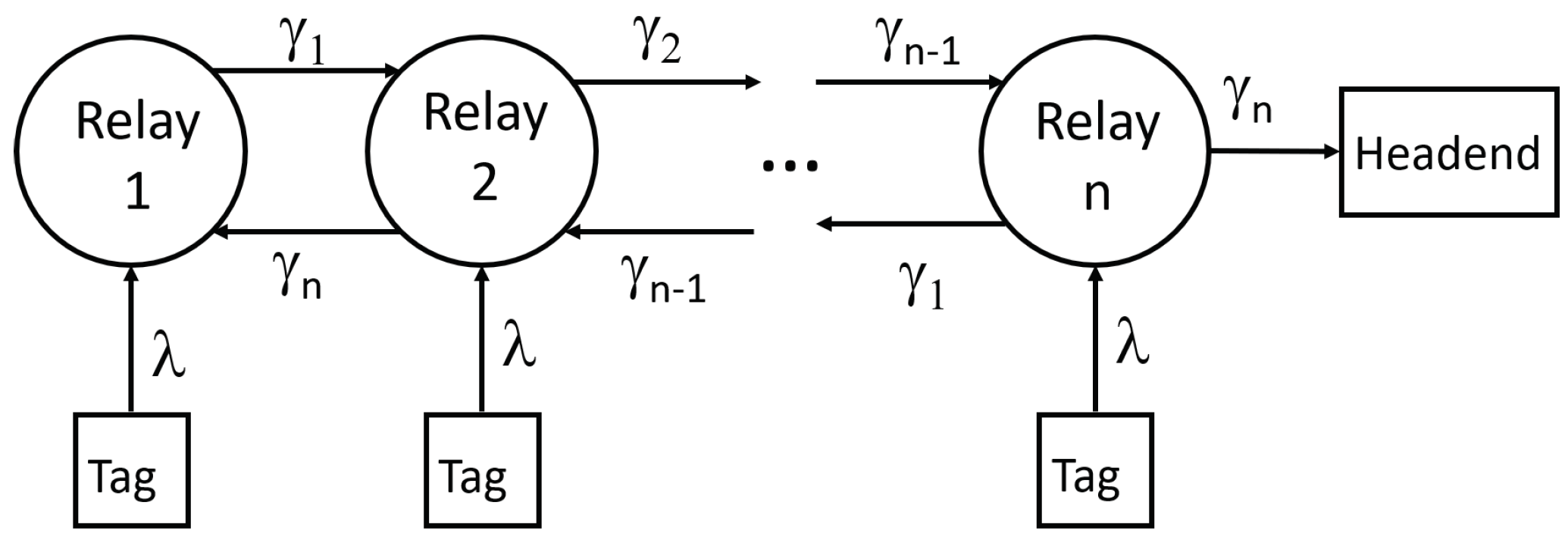
- Message forwarding is based on flooding rather than unicast. Any relay that receives a message uses minimal state information to decide whether or not to forward it. There is no need for static routing or routing protocols.
- Collision management is based on a simplified Carrier Sense Multiple Access (CSMA) mechanism where tags and relays listen to the wireless medium and when it becomes idle, wait a random interval before transmitting.
2. Related Work
3. System Implementation and Trials
3.1. Design

3.2. Field Trials
4. Analysis
5. Scalability
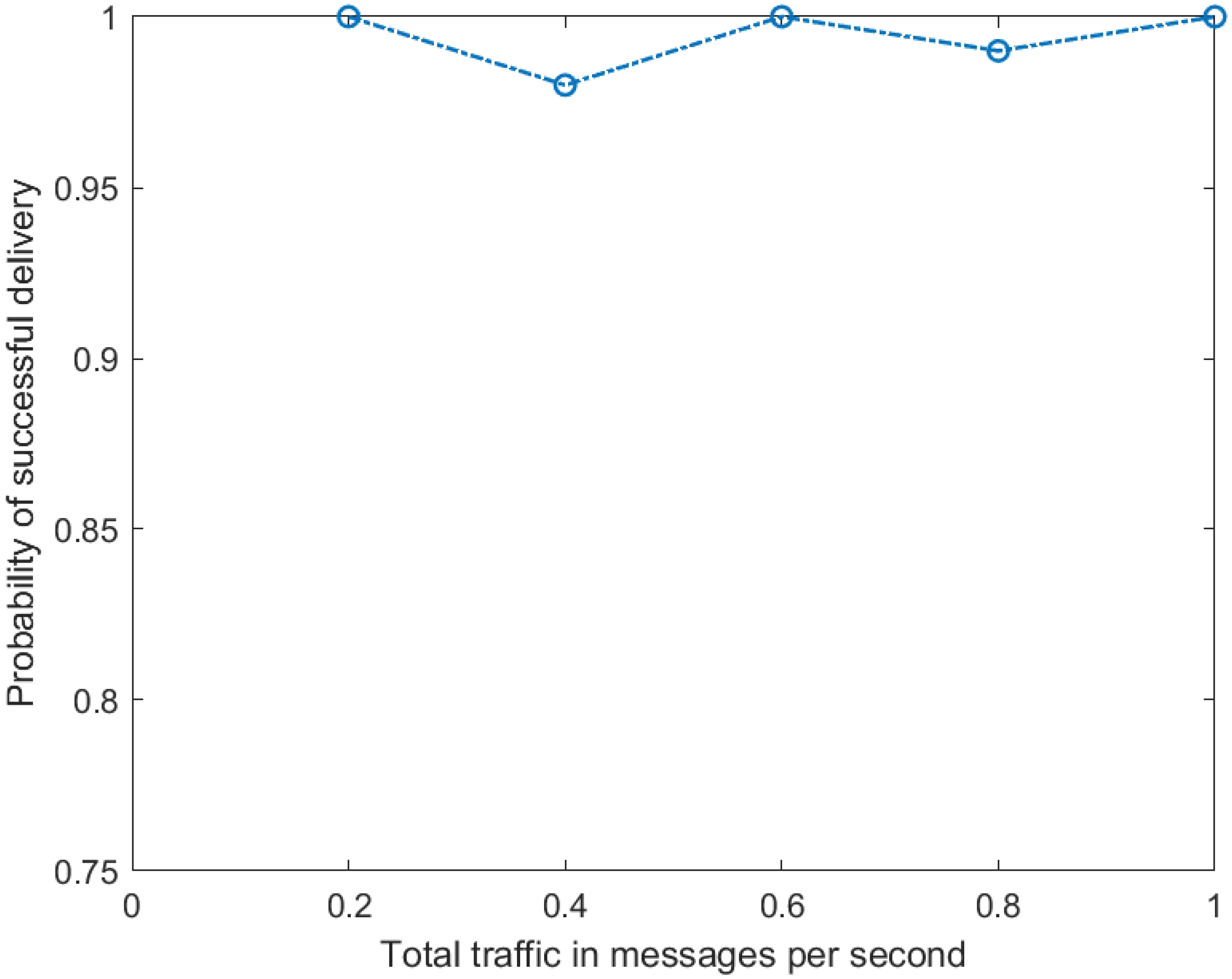
5.1. Rate of Successful Delivery
5.2. Skewed Tag Distribution
5.3. Fairness
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Branch, P.; Cricenti, T. A LoRa Relay Based System for Detonating Explosives in Underground Mines. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 259–264. [Google Scholar]
- Wang, H.; Fapojuwo, A.O. A Survey of Enabling Technologies of Low Power and Long Range Machine-to-Machine Communications. IEEE Commun. Surv. Tutor. 2017, 19, 2621–2639. [Google Scholar] [CrossRef]
- Chen, G.Z.; Meng, Q.C.; Zhang, L. Chain-type wireless sensor network node scheduling strategy. J. Syst. Eng. Electron. 2014, 25, 203–210. [Google Scholar] [CrossRef]
- Hakem, N.; Delisle, G.; Coulibaly, Y. Radio-Wave Propagation into an Underground Mine environment at 2.4 GHz, 5.8 GHz and 60 GHz. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014. [Google Scholar] [CrossRef]
- Forooshani, A.E.; Bashir, S.; Michelson, D.G.; Noghanian, S. A Survey of Wireless Communications and Propagation Modeling in Underground Mines. IEEE Commun. Surv. Tutor. 2013, 15, 1524–1545. [Google Scholar] [CrossRef]
- Kunsei, H.; Bialkowski, K.S.; Alam, M.S.; Abbosh, A.M. Improved Communications in Underground Mines Using Reconfigurable Antennas. IEEE Trans. Antennas Propag. 2018, 66. [Google Scholar] [CrossRef]
- Zhou, C.; Plass, T.; Jacksha, R.; Waynert, J.A. RF Propagation in Mines and Tunnels: Extensive measurements for vertically, horizontally, and cross-polarized signals in mines and tunnels. IEEE Antennas Propag. Mag. 2015, 57, 88–102. [Google Scholar] [CrossRef]
- Rizos, C.; Li, B.; Zhao, K.; Saydam, S.; Wang, Q. Third generation positioning system for underground mine environments: An update on progress. In Proceedings of the IGNSS Symposium, Sydney, Australia, 6–8 December 2016. [Google Scholar]
- Yarkan, S.; Guzelgoz, S.; Arslan, H.; Murphy, R.R. Underground Mine Communications: A Survey. IEEE Commun. Surv. Tutor. 2009, 11, 125–142. [Google Scholar] [CrossRef]
- Zhohov, R.; Minovski, D.; Johansson, P.; Andersson, K. Real-time Performance Evaluation of LTE for IIoT. In Proceedings of the IEEE 43rd Conference on Local Computer Networks (LCN), Chicago, IL, USA, 1–4 October 2018. [Google Scholar]
- Liao, C.H.; Zhu, G.; Kuwabara, D.; Suzuki, M.; Morikawa, H. Multi-Hop LoRa Networks Enabled by Concurrent Transmission. IEEE Access 2017, 5, 21430–21446. [Google Scholar] [CrossRef]
- Lundell, D.; Hedberg, A.; Nyberg, C.; Fitzgerald, E. A Routing Protocol for LoRa Mesh Networks. In Proceedings of the 2018 IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Chania, Greece, 12–15 June 2018; pp. 14–19. [Google Scholar] [CrossRef] [Green Version]
- Abrardo, A.; Pozzebon, A. A Multi-Hop LoRa Linear Sensor Network for the Monitoring of Underground Environments: The Case of the Medieval Aqueducts in Siena, Italy. Sensors 2019, 19, 402. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.C.; Ke, K.H. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System: Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- Branch, P.; Cricenti, T. A LoRa Based Wireless Relay Network for Actuator Data. In Proceedings of the 2020 International Conference on Information Networking (ICOIN), Barcelona, Spain, 7–10 January 2020; pp. 190–195. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tag Distribution | Success Probability |
|---|---|
| 16 0 0 0 0 0 0 0 | 0.974 |
| 8 8 0 0 0 0 0 0 | 0.966 |
| 4 4 4 4 0 0 0 0 | 0.948 |
| 2 2 2 2 2 2 2 2 | 0.924 |
| 0 0 0 0 4 4 4 4 | 0.923 |
| 0 0 0 0 0 0 8 8 | 0.920 |
| 0 0 0 0 0 0 0 16 | 0.924 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Branch, P.; Li, B.; Zhao, K. A LoRa-Based Linear Sensor Network for Location Data in Underground Mining. Telecom 2020, 1, 68-79. https://doi.org/10.3390/telecom1020006
Branch P, Li B, Zhao K. A LoRa-Based Linear Sensor Network for Location Data in Underground Mining. Telecom. 2020; 1(2):68-79. https://doi.org/10.3390/telecom1020006
Chicago/Turabian StyleBranch, Philip, Binghao Li, and Kai Zhao. 2020. "A LoRa-Based Linear Sensor Network for Location Data in Underground Mining" Telecom 1, no. 2: 68-79. https://doi.org/10.3390/telecom1020006
APA StyleBranch, P., Li, B., & Zhao, K. (2020). A LoRa-Based Linear Sensor Network for Location Data in Underground Mining. Telecom, 1(2), 68-79. https://doi.org/10.3390/telecom1020006