
Real-Time Detection of Bud Degeneration in Oil Palms Using an Unmanned Aerial Vehicle

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
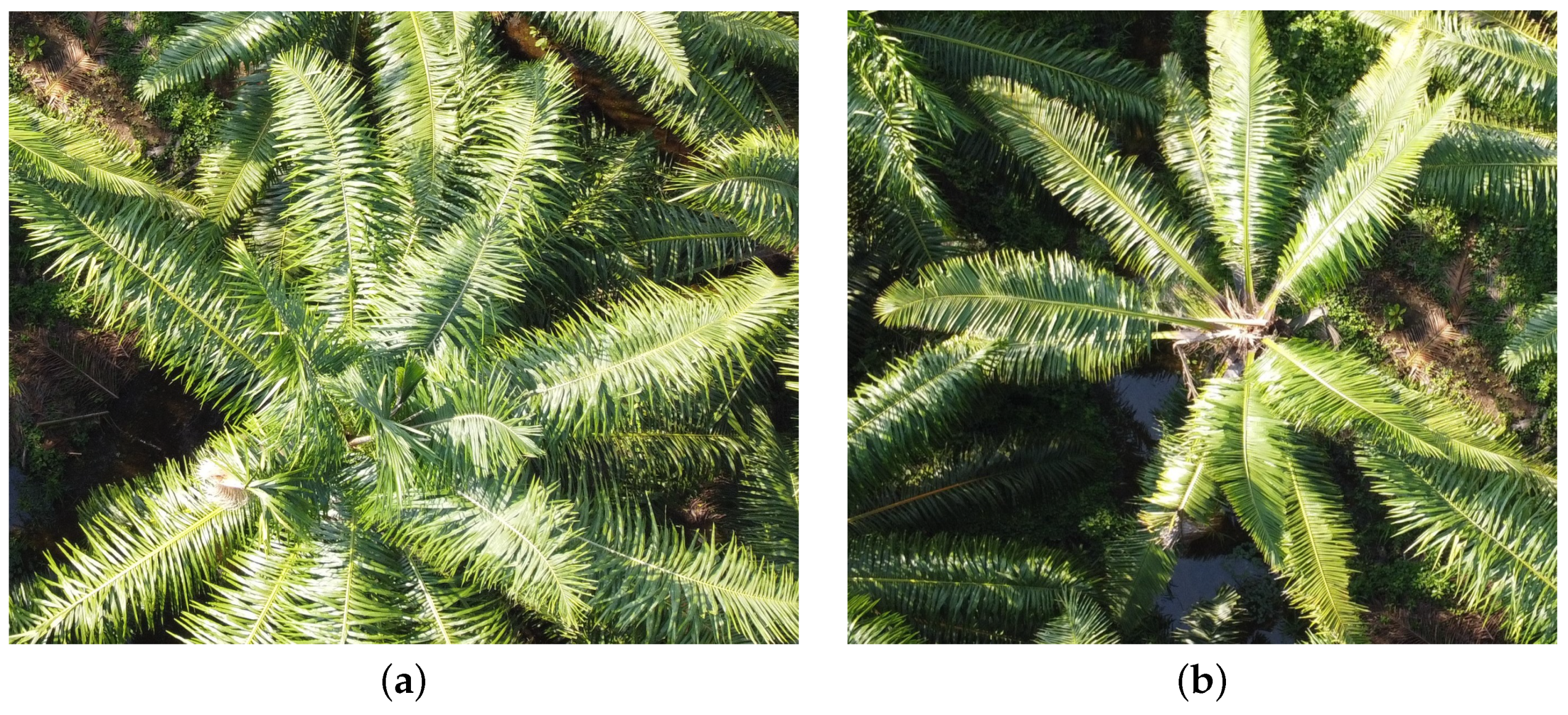
2.1. Database Acquisition
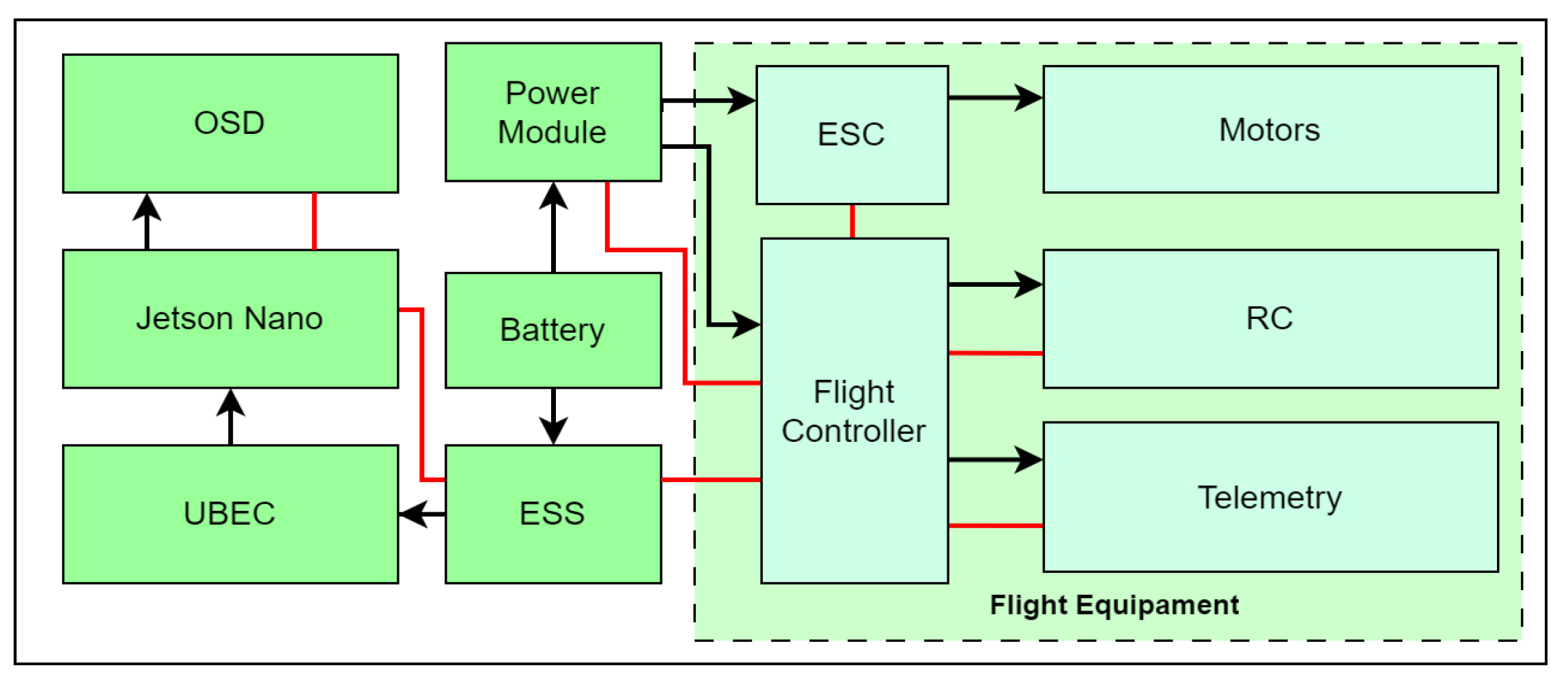
2.2. System Configuration
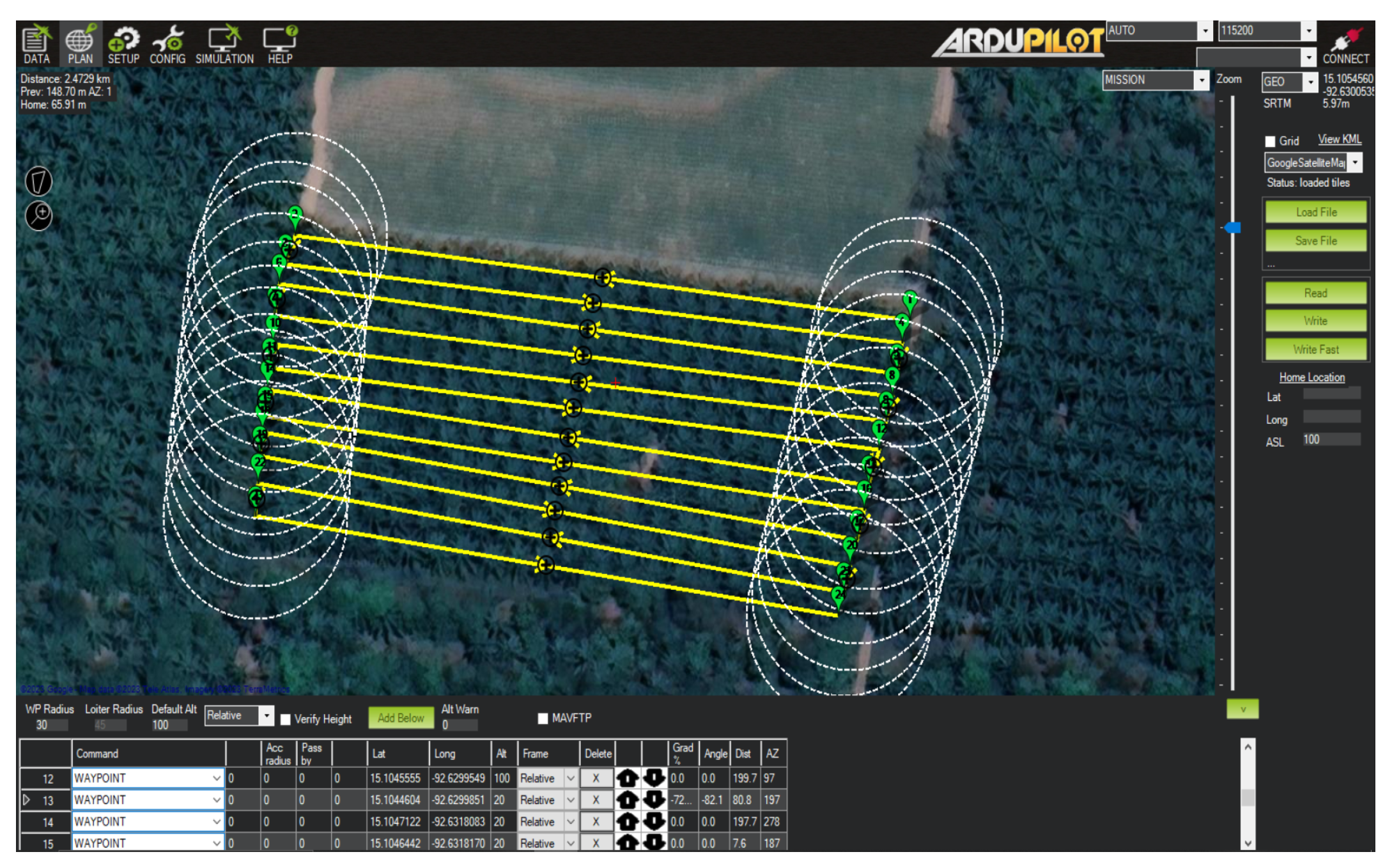
2.3. Crop Monitoring
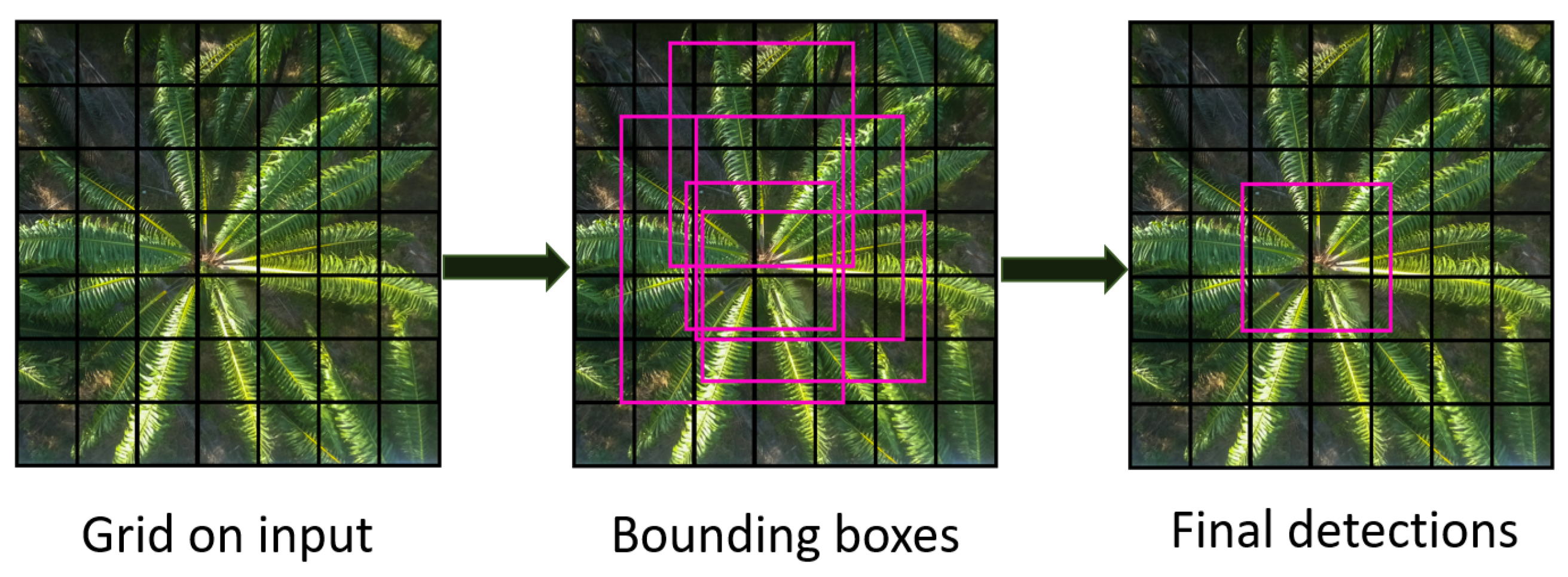
2.4. Real-Time Detection
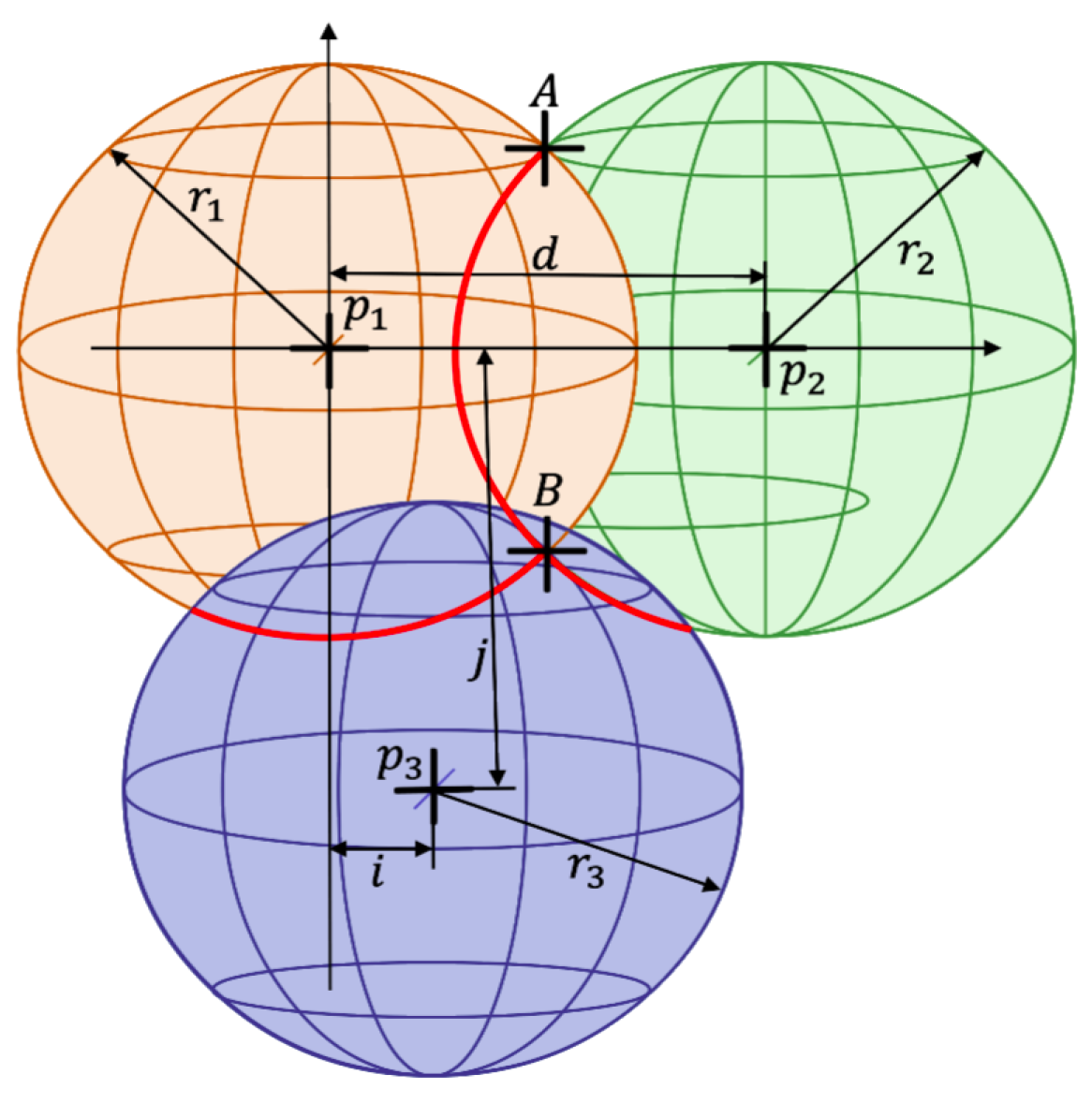
2.5. Data Transmissions
3. Experimental Results
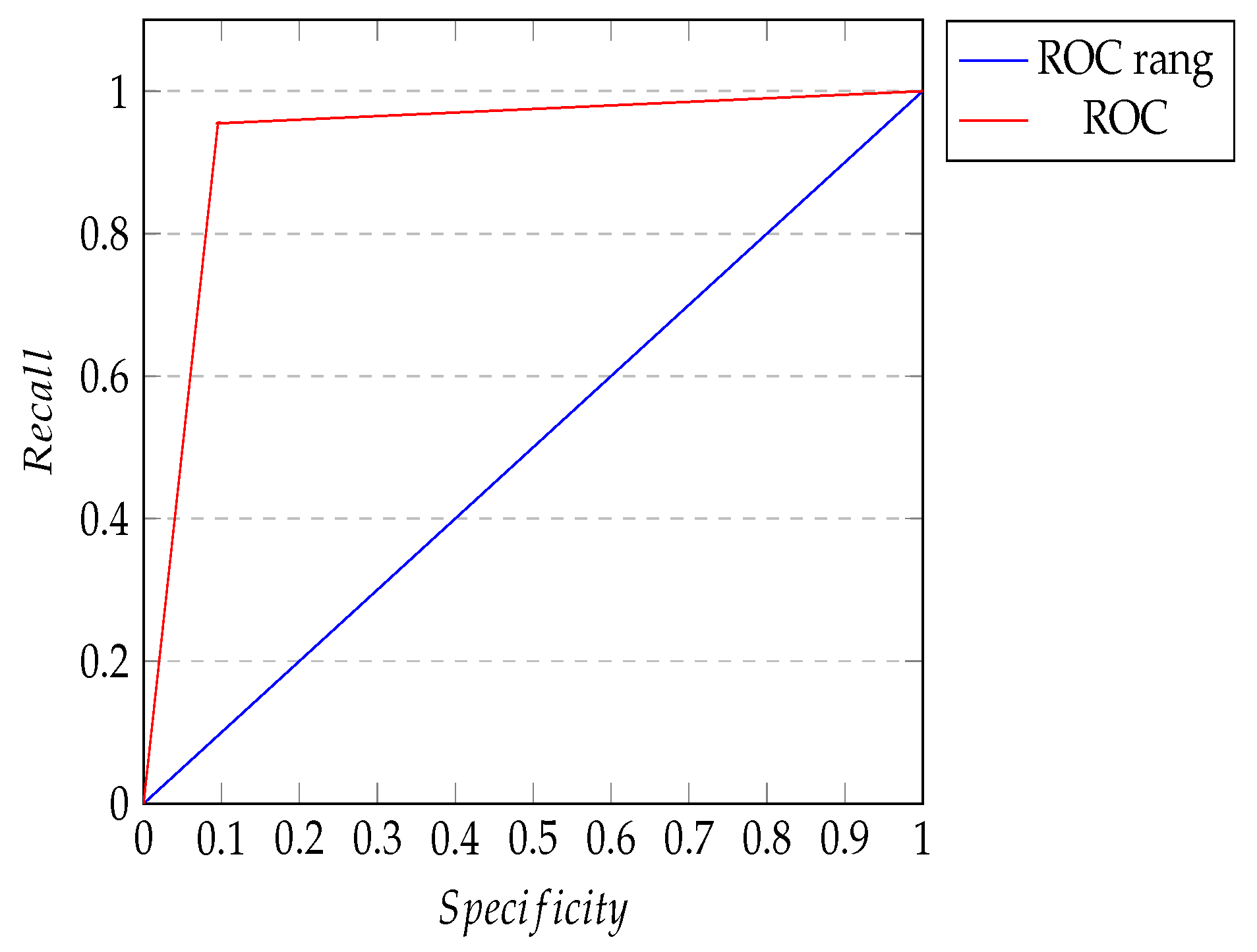
3.1. Metrics
3.2. Database
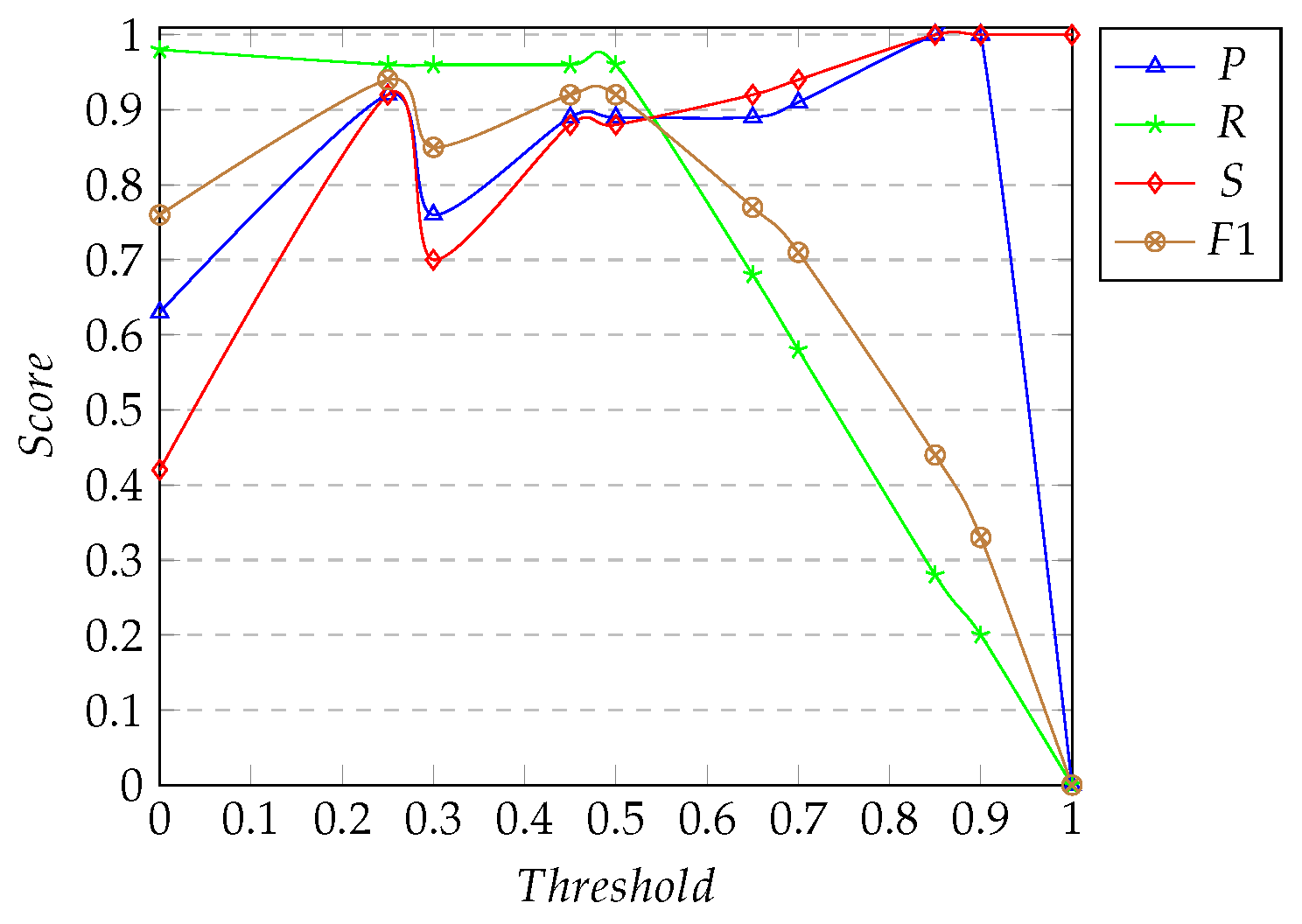
3.3. Experiment 1: Detection Threshold Tuning
3.4. Experiment 2: Validation on the Test Dataset
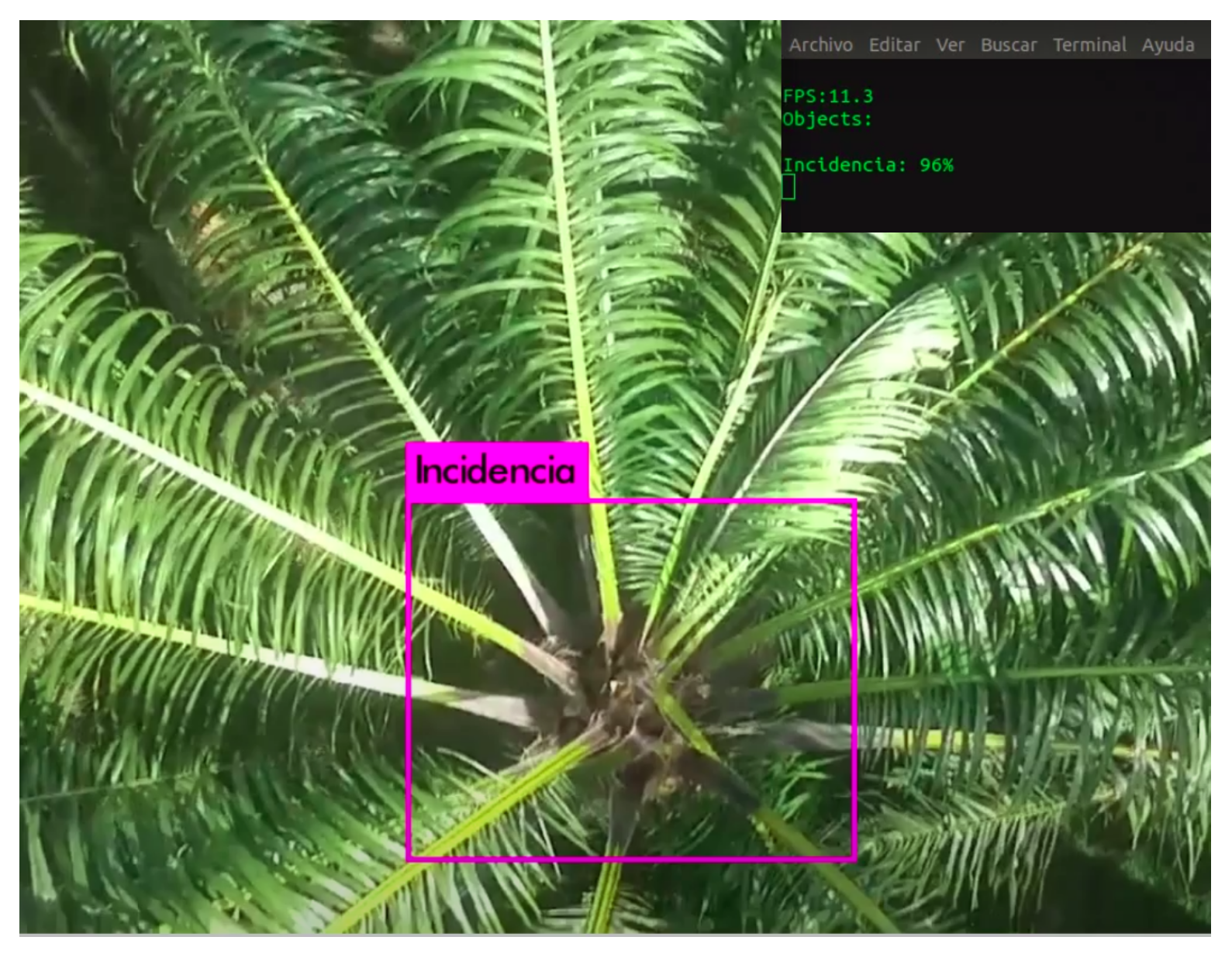
3.5. Experiment 3: Real-Time BD Detection
3.6. Experiment 4: Comparison with Current Methodology
3.7. Experiment 5: Validation on the Scope Dataset
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ledezma Cellan, E.B. Manejo Integrado de Pudrición de la Flecha en el Cultivo de Palma Aceitera (Elaeis Guineensis Jacp) en Ecuador. Bachelor’s Thesis, Universidad Técnica de Babahoyo, Babahoyo, Ecuador, 2019. [Google Scholar]
- Torres, G.; Sarria, G.; Martinez, G.; Varon, F.; Drenth, A.; Guest, D. Bud rot caused by Phytophthora palmivora: A destructive emerging disease of oil palm. Phytopathology 2016, 106, 320–329. [Google Scholar] [CrossRef] [Green Version]
- America, C.L. Bud Rot. Available online: https://www.croplifela.org/es/plagas/listado-de-plagas/pudricion-del-cogollo (accessed on 2 November 2022).
- Ponguillo López, J.S.; Romero Lino, O.D. La Enfermedad de Pudrición del Cogollo PC y su Efecto Economico en la Producción de Palma Africana del Cantón Quininde, Provincia de Esmeraldas. Bachelor’s Thesis, Facultad de Ciencias Económicas, Universidad de Guayaquil, Guayaquil, Ecuador, 2021. [Google Scholar]
- Li, F.; Jin, X.; Chen, X.; Wang, L. Unmanned aerial vehicle-based remote sensing for precision agriculture: A review. Remote Sens. 2020, 12, 1470. [Google Scholar]
- Qin, B.; Sun, F.; Shen, W.; Dong, B.; Ma, S.; Huo, X.; Lan, P. Deep Learning-Based Pine Nematode Trees Identification Using Multispectral and Visible UAV Imagery. Drones 2023, 7, 183. [Google Scholar] [CrossRef]
- Bisen, D. Deep convolutional neural network based plant species recognition through features of leaf. Multimed. Tools Appl. 2021, 80, 6443–6456. [Google Scholar] [CrossRef]
- Qin, Z.; Wang, W.; Dammer, K.H.; Guo, L.; Cao, Z. A real-time low-cost artificial intelligence system for autonomous spraying in palm plantations. arXiv 2021, arXiv:2103.04132. [Google Scholar]
- Jiang, B.; Chen, S.; Wang, B.; Luo, B. MGLNN: Semi-supervised learning via multiple graph cooperative learning neural networks. Neural Netw. 2022, 153, 204–214. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, Y.; Lv, Q.; Wei, S.; Wang, X.; Sun, X.; Dong, J. Rrnet: A hybrid detector for object detection in drone-captured images. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, Seoul, Republic of Korea, 27–28 October 2019. [Google Scholar]
- Parico, A.I.B.; Ahamed, T. An aerial weed detection system for green onion crops using the you only look once (YOLOv3) deep learning algorithm. Eng. Agric. Environ. Food 2020, 13, 42–48. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Y.; Zhan, Q.; Yang, C.; Zhao, B.; Liu, J. Deep Learning for Identifying Diseased Turfgrass Using UAV-Based Multispectral Images. Remote Sens. 2022, 14, 243. [Google Scholar]
- Liu, G.; Nouaze, J.C.; Touko Mbouembe, P.L.; Kim, J.H. YOLO-tomato: A robust algorithm for tomato detection based on YOLOv3. Sensors 2020, 20, 2145. [Google Scholar] [CrossRef] [Green Version]
- Roy, A.M.; Bhaduri, J. A computer vision enabled damage detection model with improved yolov5 based on transformer prediction head. arXiv 2023, arXiv:2303.04275. [Google Scholar]
- Directorioempresarialmexico.com. Zitihualt, S.P.R. DE R.L. Available online: https://directorioempresarialmexico.com/empresa/0006254771/ZITIHUALT,-S.P.R.-DE-RL/ (accessed on 10 December 2022).
- Arias, N.A.; Beltrán, J.A.; Guerrero, J.M.; Sánchez, A.C. Tecnologías para el manejo de la Pudricion del cogollo (PC) de la palma de aceite validadas en las zonas palmeras de Colombia. Rev. Palmas 2014, 35, 39–52. [Google Scholar]
- Butler, E.J. Pudricion del cogollo. In Proceedings of the CAB International. Available online: https://www.gob.mx/cms/uploads/attachment/file/172378/Ficha_T_cnica_de_Pudricion_del_cogollo.pdf (accessed on 10 December 2020).
- CENIPALMA. Centro De Investigación En Palma de Aceite. Available online: https://www.cenipalma.org/ (accessed on 5 December 2022).
- Martínez, G.; Torres L., G.A.; Sarria, G.A.; Salcedo, S.; Varón, F.; Aya, H.A. Opciones de manejo de la Pudrición del cogollo (PC) de la Palma de aceite en áreas de baja incidencia de la enfermedad. Palmas 2008, 29, 63–72. [Google Scholar]
- Iost Filho, F.H.; Heldens, W.B.; Kong, Z.; de Lange, E.S. Drones: Innovative technology for use in precision pest management. J. Econ. Entomol. 2020, 113, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture drones: A modern breakthrough in precision agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Nvidia. NVIDIA Jetson Nano. Available online: https://www.nvidia.com/es-la/autonomous-machines/embedded-systems/jetson-nano/ (accessed on 17 August 2022).
- Martínez, G.; Torres, G.A. Presencia de la Pudrición de Cogollo de la palma de aceite (PC) en plantas de vivero. Palmas 2007, 28, 13–20. [Google Scholar]
- Sarria Villa, G.; Aldana de la Torre, R.; Arango, U. Guía de Bolsillo para el Reconocimiento y Manejo de las Principales Enfermedades e Insectos Plaga en el Cultivo de la Palma de Aceite. Arango. Available online: https://repositorio.fedepalma.org/handle/123456789/108797 (accessed on 10 December 2022).
- Guerrero, E.D.N.; De La Torre, F.A.V. Desarrollo de un modelo matemático, cinemático y dinámico con la aplicación de software, para modificar el funcionamiento de un dron, para que este realice monitoreo automático. Recimundo 2020, 4, 332–343. [Google Scholar]
- Guevara, B.S.; Recalde, L.F.; Varela-Aldás, J.; Andaluz, V.H.; Gandolfo, D.C.; Toibero, J.M. A Comparative Study between NMPC and Baseline Feedback Controllers for UAV Trajectory Tracking. Drones 2023, 7, 144. [Google Scholar] [CrossRef]
- Saif, E.; Eminoğlu, İ. Modelling of quad-rotor dynamics and Hardware-in-the-Loop simulation. J. Eng. 2022, 2022, 937–950. [Google Scholar] [CrossRef]
- Du, J. Understanding of object detection based on CNN family and YOLO. J. Phys. Conf. Ser. 2018, 1004, 012029. [Google Scholar] [CrossRef]
- Martınez, G.M. Sistema Posicionamiento Global (GPS) y Teorías de la Relatividad, 2014. Martinez. Available online: https://diarium.usal.es/guillermo/files/2013/04/GPSyRelatividadporGuillermoSanchez.pdf (accessed on 10 December 2022).
- LabelImg. Available online: https://github.com/heartexlabs/labelImg (accessed on 12 December 2022).
- Park, S.H.; Goo, J.M.; Jo, C.H. Receiver operating characteristic (ROC) curve: Practical review for radiologists. Korean J. Radiol. 2004, 5, 11–18. [Google Scholar] [CrossRef] [Green Version]
- Martínez, G.; Villa, G.A.S.; Torres, G.; Varón, F.; Drenth, A.; Guest, D. Nuevos hallazgos sobre la enfermedad de la Pudrición del cogollo de la palma de aceite en Colombia: Biología, detección y estrategias de manejo. Palmas 2014, 35, 11–17. [Google Scholar]
- Femexpalma. Federacion Mexicana de Palma de Aceite. Available online: https://www.femexpalma.com.mx/ (accessed on 9 May 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set | Size | Format | Quality |
|---|---|---|---|
| Train | 2000 | JPG | 5 Mpx. |
| Test | 400 | JPG | 8 Mpx. |
| Scope | 400 | JPG | 64 Mpx. |
| Condition of the Crop | Age of Crop | Detection Time | Precision | Recall | F1-Score | ||||
|---|---|---|---|---|---|---|---|---|---|
| Current | Proposed | Current | Proposed | Current | Proposed | Current | Proposed | ||
| Clean crop | 5 | 2:20 | 0:25 | 86% | 100% | 86% | 86% | 67% | 92% |
| Dirty crop | 5 | 3:18 | 0:23 | 75% | 83% | 60% | 100% | 67% | 89% |
| Clean crop | 9 | 2:50 | 0:24 | 100% | 75% | 67% | 100% | 80% | 100% |
| Dirty crop | 9 | 3:15 | 0:15 | 50% | 80% | 25% | 100% | 33% | 89% |
| Clean crop | 15 | 3:00 | 0:23 | 100% | 67% | 67% | 100% | 80% | 100% |
| Dirty crop | 15 | 3:30 | 0:30 | 50% | 100% | 67% | 67% | 57% | 100% |
| Clean crop | 22 | 3:10 | 0:26 | 35% | 100% | 50% | 100% | 33% | 100% |
| Dirty crop | 22 | 3:35 | 0:30 | 67% | 100% | 40% | 80% | 40% | 89% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vázquez-Ramírez, A.; Mújica-Vargas, D.; Luna-Álvarez, A.; Matuz-Cruz, M.; Rubio, J.d.J. Real-Time Detection of Bud Degeneration in Oil Palms Using an Unmanned Aerial Vehicle. Eng 2023, 4, 1581-1596. https://doi.org/10.3390/eng4020090
Vázquez-Ramírez A, Mújica-Vargas D, Luna-Álvarez A, Matuz-Cruz M, Rubio JdJ. Real-Time Detection of Bud Degeneration in Oil Palms Using an Unmanned Aerial Vehicle. Eng. 2023; 4(2):1581-1596. https://doi.org/10.3390/eng4020090
Chicago/Turabian StyleVázquez-Ramírez, Alexis, Dante Mújica-Vargas, Antonio Luna-Álvarez, Manuel Matuz-Cruz, and José de Jesus Rubio. 2023. "Real-Time Detection of Bud Degeneration in Oil Palms Using an Unmanned Aerial Vehicle" Eng 4, no. 2: 1581-1596. https://doi.org/10.3390/eng4020090
APA StyleVázquez-Ramírez, A., Mújica-Vargas, D., Luna-Álvarez, A., Matuz-Cruz, M., & Rubio, J. d. J. (2023). Real-Time Detection of Bud Degeneration in Oil Palms Using an Unmanned Aerial Vehicle. Eng, 4(2), 1581-1596. https://doi.org/10.3390/eng4020090