
Power Transmission Using Circular Elements Bounded by Given Central Angle in Rolling Contact


Abstract
:1. Introduction
- (i)
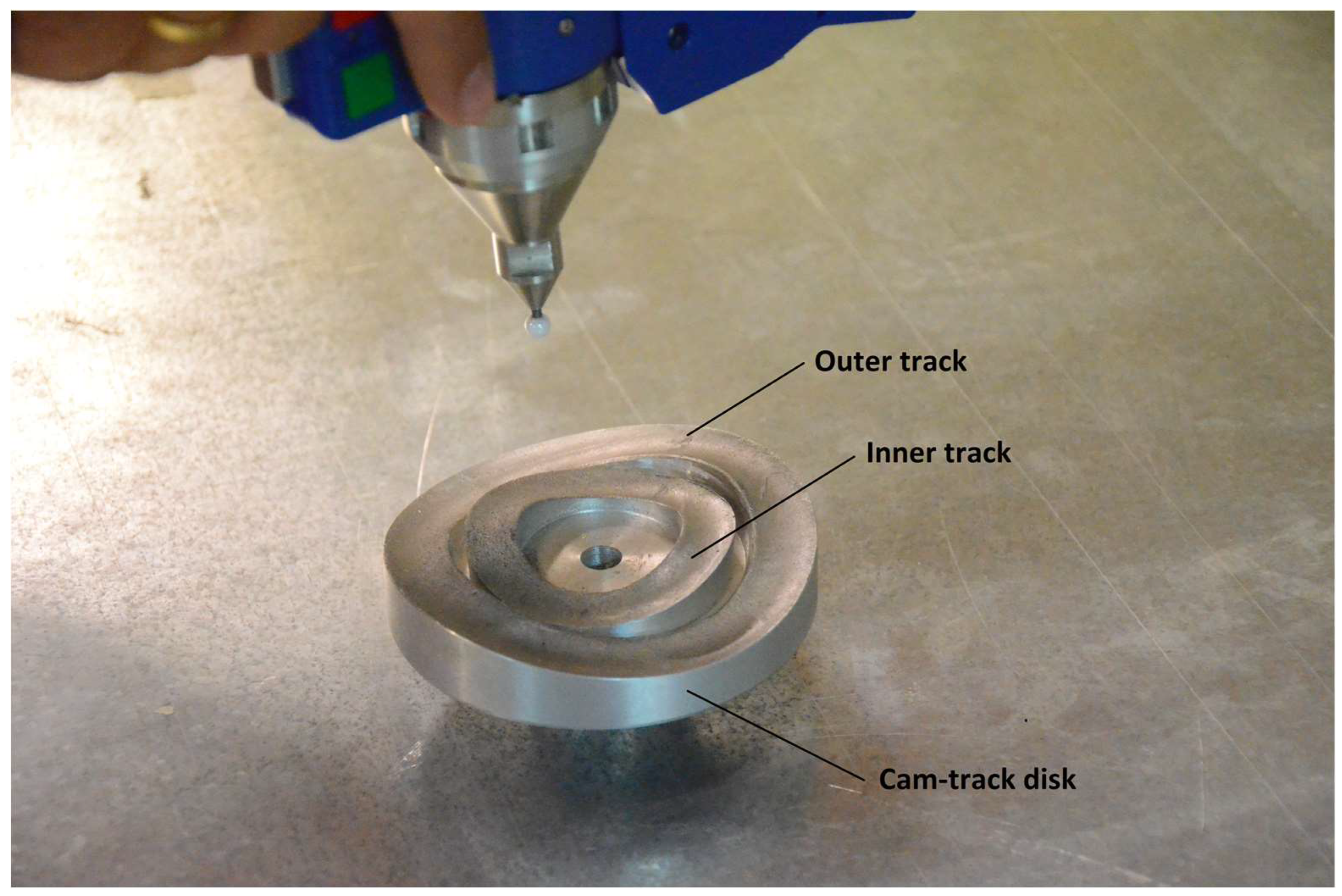
- The usual side gears, which are attached to the shafts of the steering wheels, are replaced by conical or wavy cam-track disks;
- (ii)
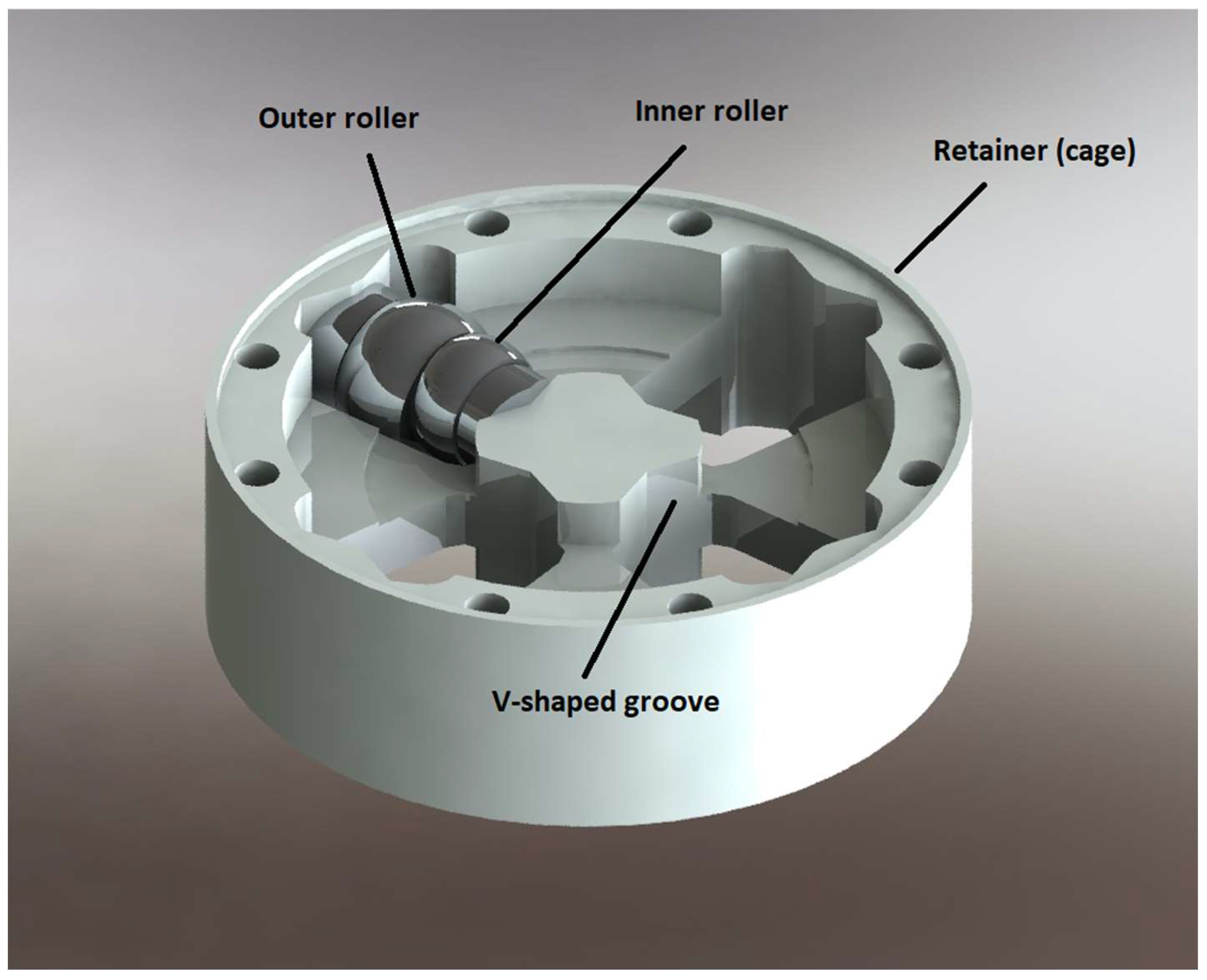
- The usual spiders (gears orbiting around the abovementioned side gears), which are also attached to the ring gear (crown wheel), are replaced by sliding elements, which interfere (slide or roll) with the cam tracks and also slide in several patented ways within a cage fixed to the aforementioned crown wheel.
- (i)
- To explain the process followed to conceive the innovative idea.
- (ii)
- To conduct a thorough theoretical study on the kinematics regarding rolling contact to certify previous findings.
- (iii)
- To perform an elementary force analysis and compare this with the previous finite element analysis.
- (iv)
- To use the abovementioned elementary force analysis to reveal and roughly optimize the most critical dimensional parameters that affect the magnitude of the maximum stress affecting the fatigue life.
- (v)
- To use the elementary force analysis and reveal the essence of the differential mechanism.
- (vi)
- To provide additional evidence for a better understanding of the operation of this differential mechanism.
2. Development of the New Concept
3. Theoretical Study of Profiled Cams in Power Transmission
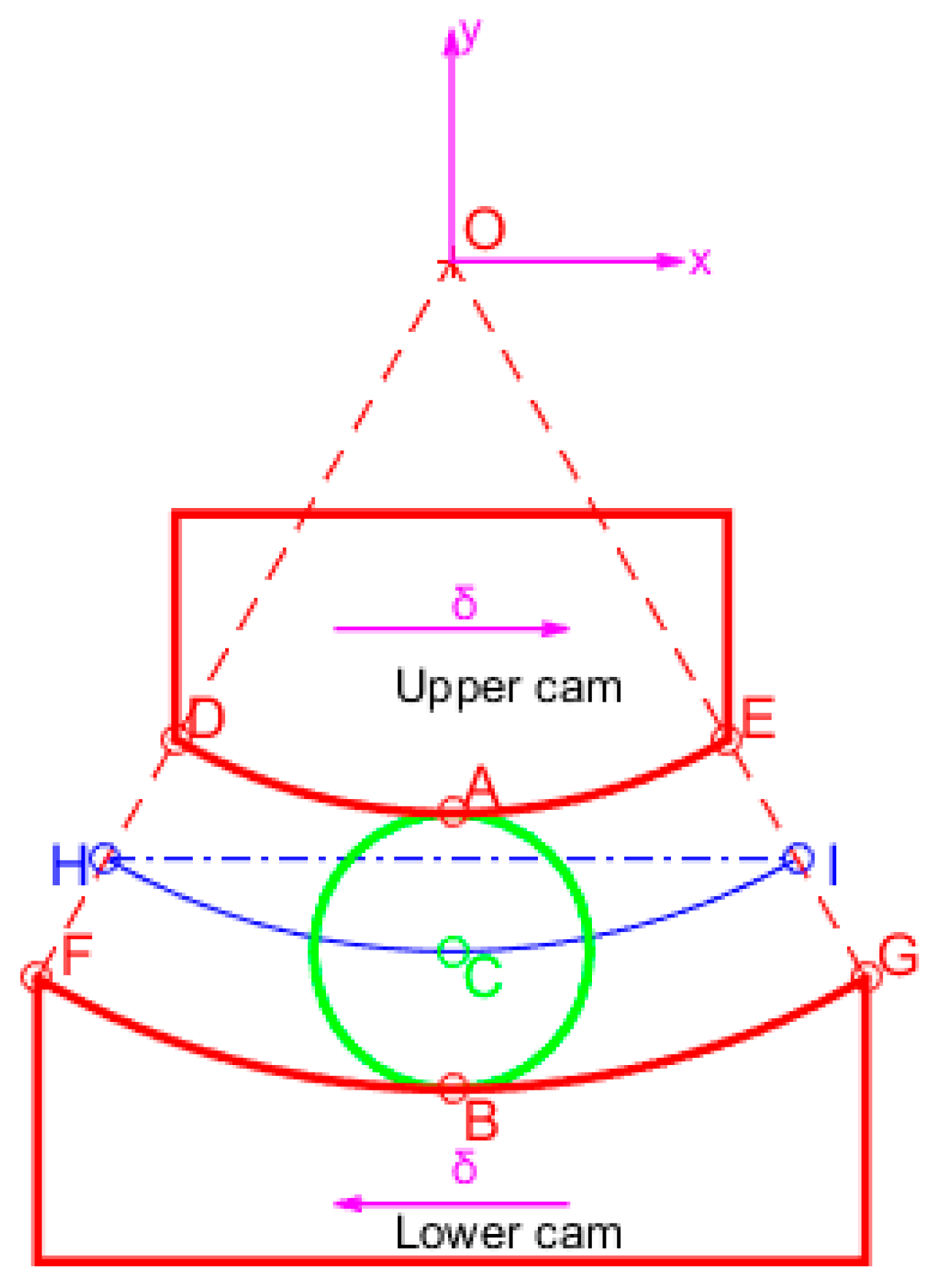
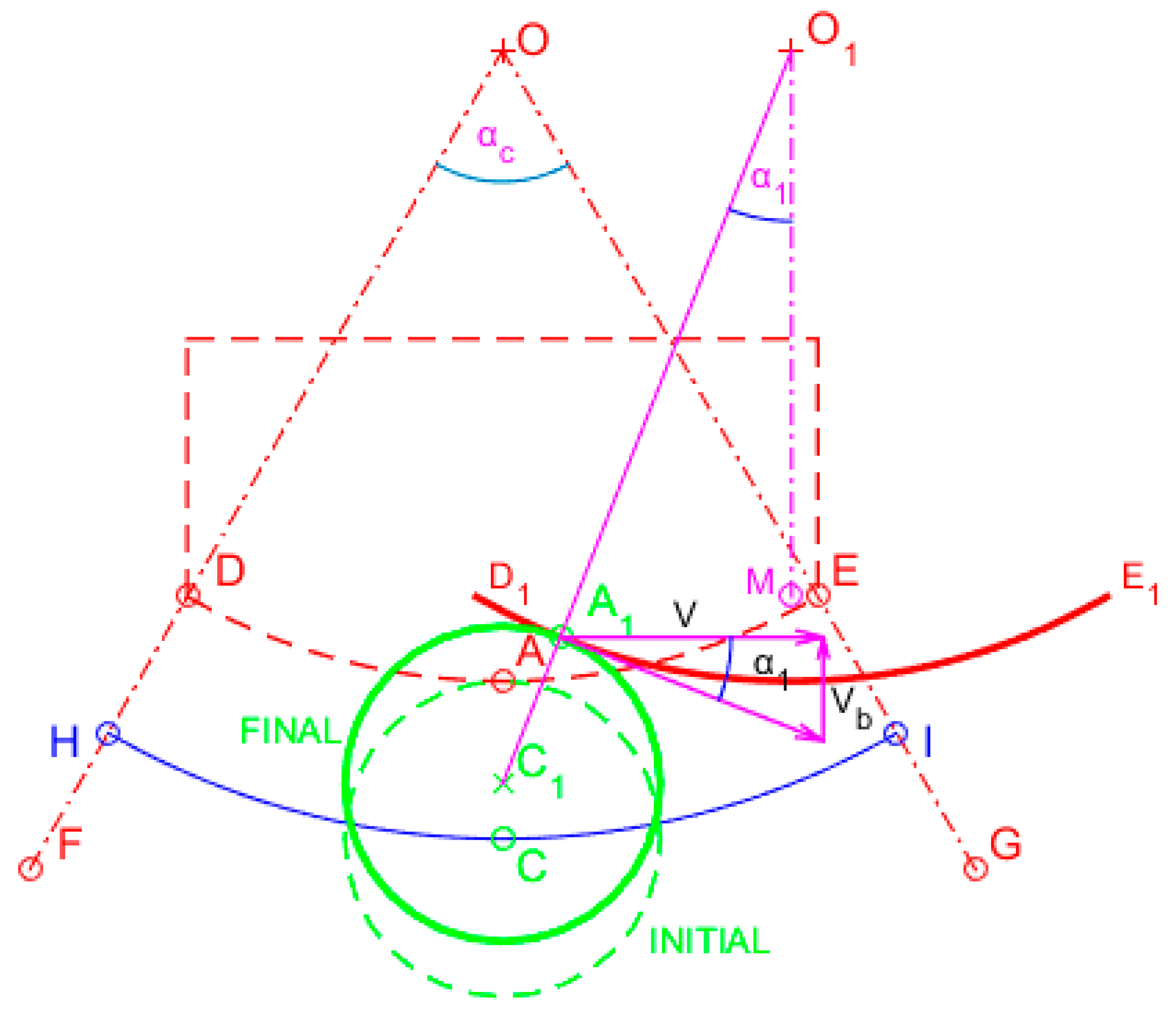
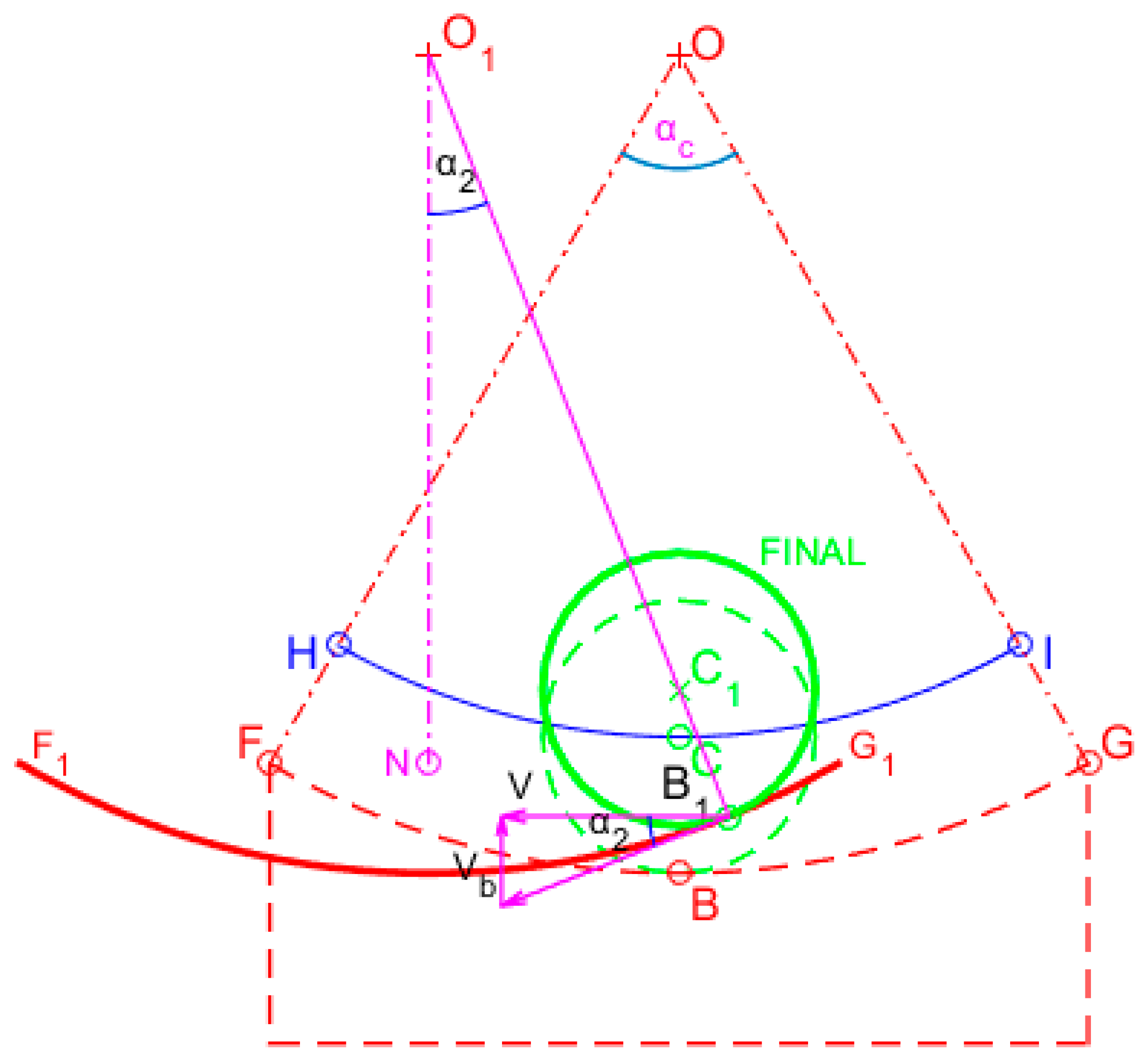
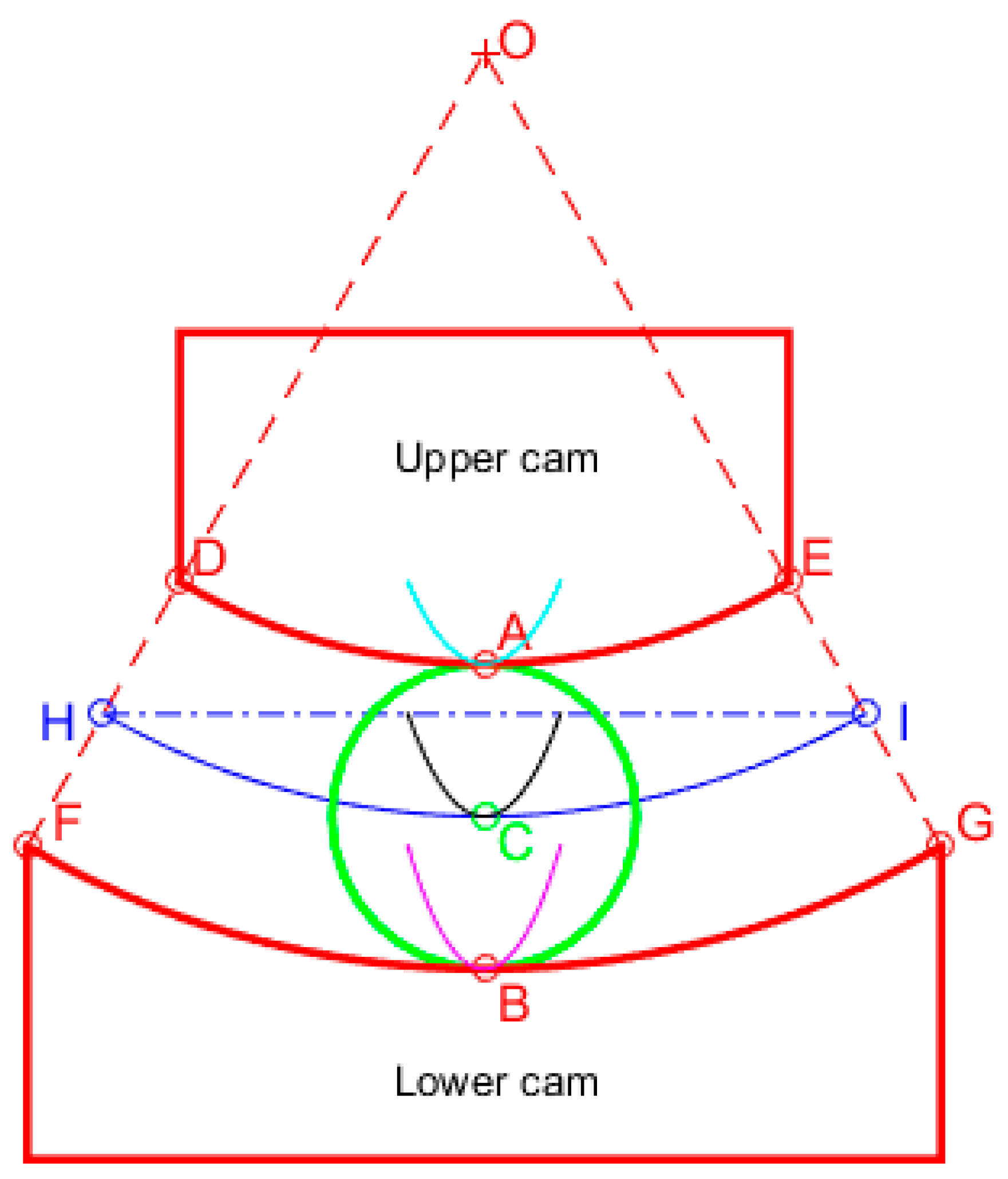
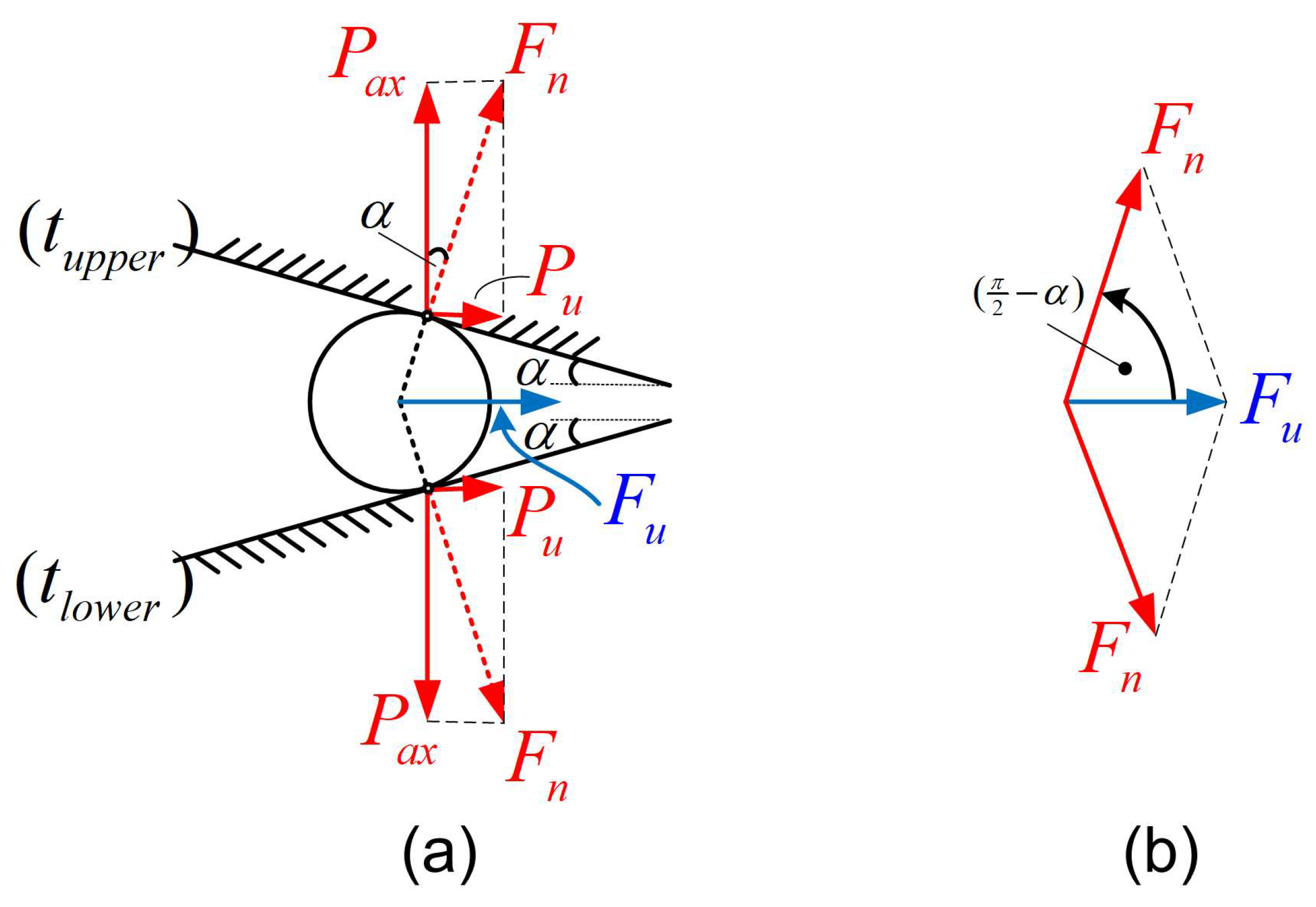
- The center of mass of the roller (point ) moves along the vertical guide () in such a way that rolling contact appears at two points which, after the displacement , occur (, ) between the roller and the two meshed cam tracks, as shown in Figure 4 (for the sake of clear visualization, point is shown later in Figure 5). Obviously, the points ( and of Figure 4) belong to the upper and lower cams, respectively.
- The slopes () of the two tangents at the abovementioned contact points (, ) are equal in measure and opposite in sign (i.e., , and ).
- The abovementioned two contact points (, ) are always symmetric with respect to the variable horizontal line passing through the center of the roller.
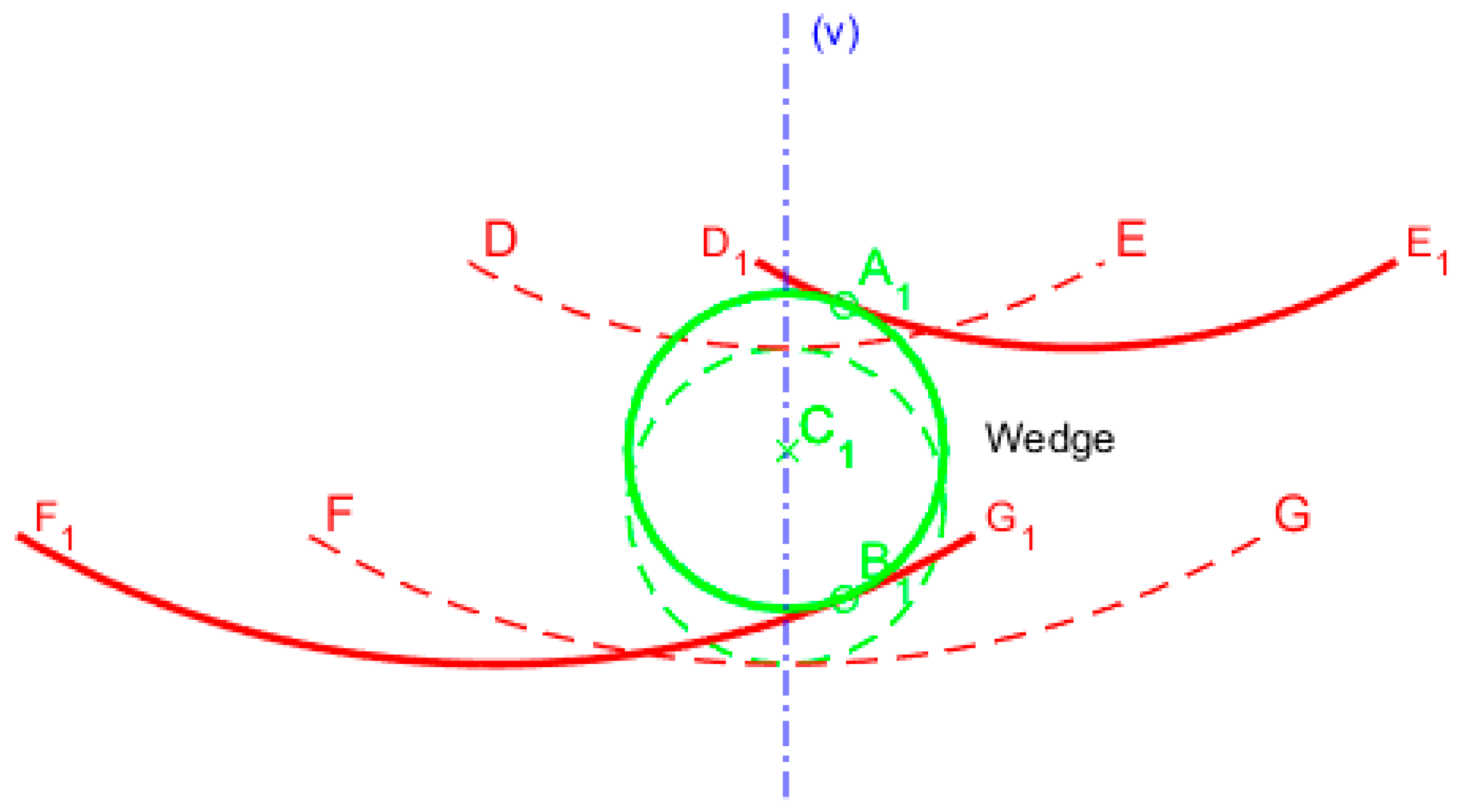
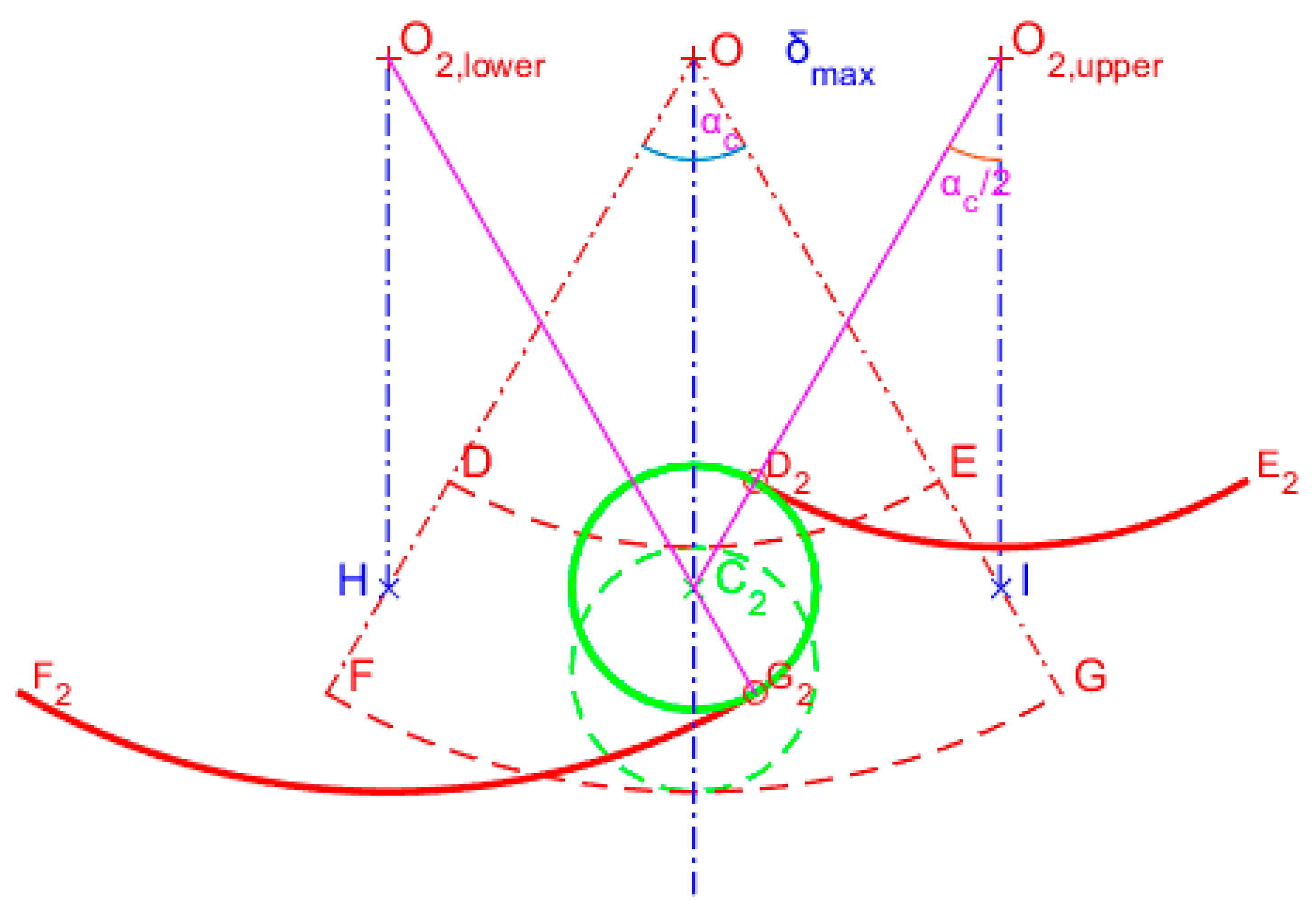
- In Figure 3, the initial position of the contact points () is the middle of the arcs and . After the displacement , the new contact points will be , as shown in Figure 4 and Figure 5, and form the angles: and . The points split the arcs in the same ratio measured from the displaced ends and ; that is, . Always, we have .
- Points ( and ) constitute the first, whereas the extreme points ( and ) shown in Figure 3 constitute the last contact pair in the mesh between the two cams and the roller.



4. Repetition of the Initial (Reference) Circular Segment
5. Parametric Equations
5.1. Center of Mass of the Roller
5.2. Contact Point between Upper Cam and Roller
5.3. Contact Point between Lower Cam and Roller
5.4. Locus of Instantaneous Pole (Centrode)
6. Implementation of the New Concept to Automotive Differentials
6.1. General Remark
6.2. Application to Automotive Differentials
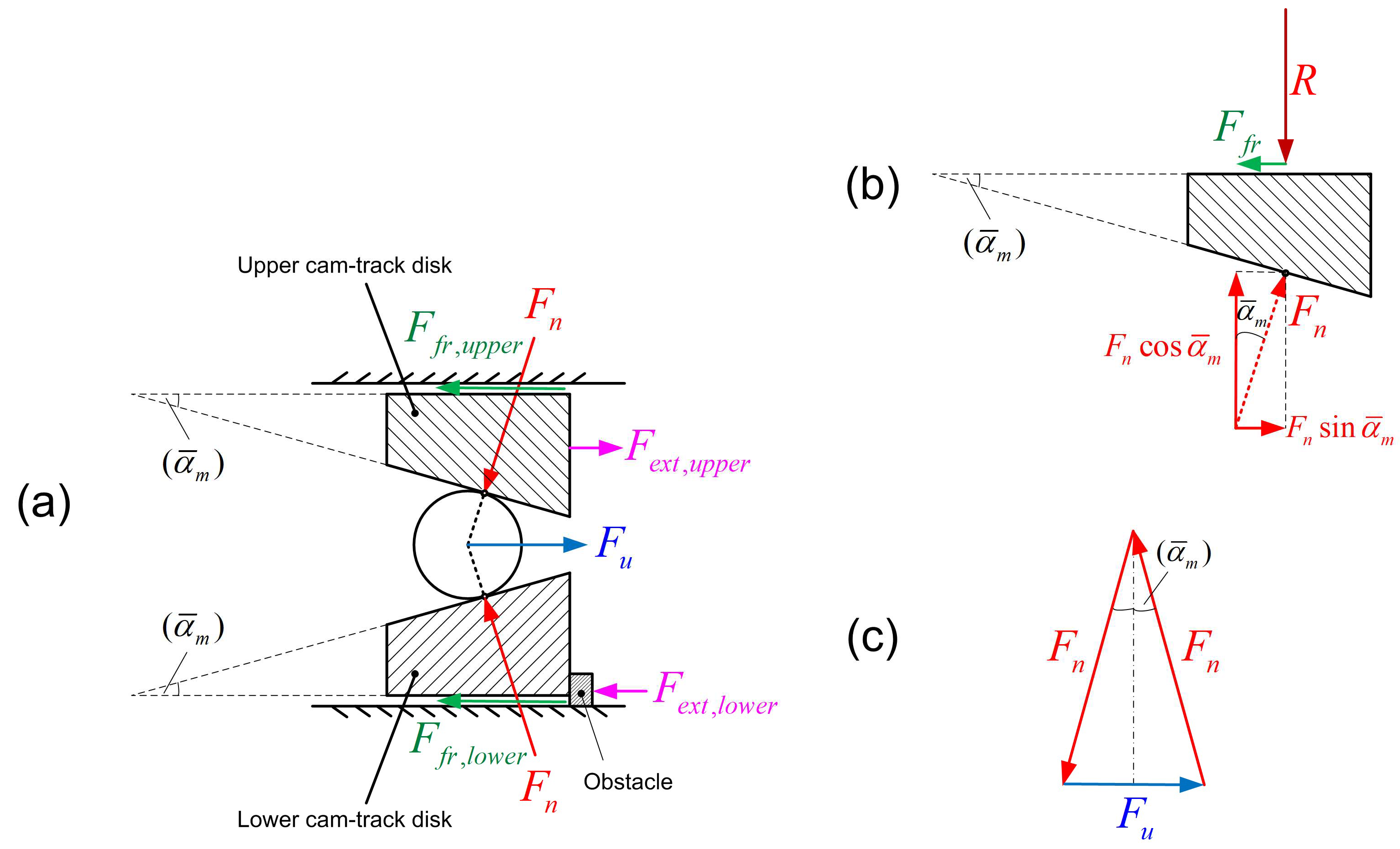
7. Force Analysis in a Simplified Model
7.1. Mechanical Model
7.2. Normal Forces
7.3. Axial Forces
8. Results
8.1. Experiments
8.2. Rough Estimation of the Inclination
8.3. Calculated Stresses
8.4. Interpretation of the Experiments
8.5. Typical Screenshots during the Operation of the Gearless Mechanism
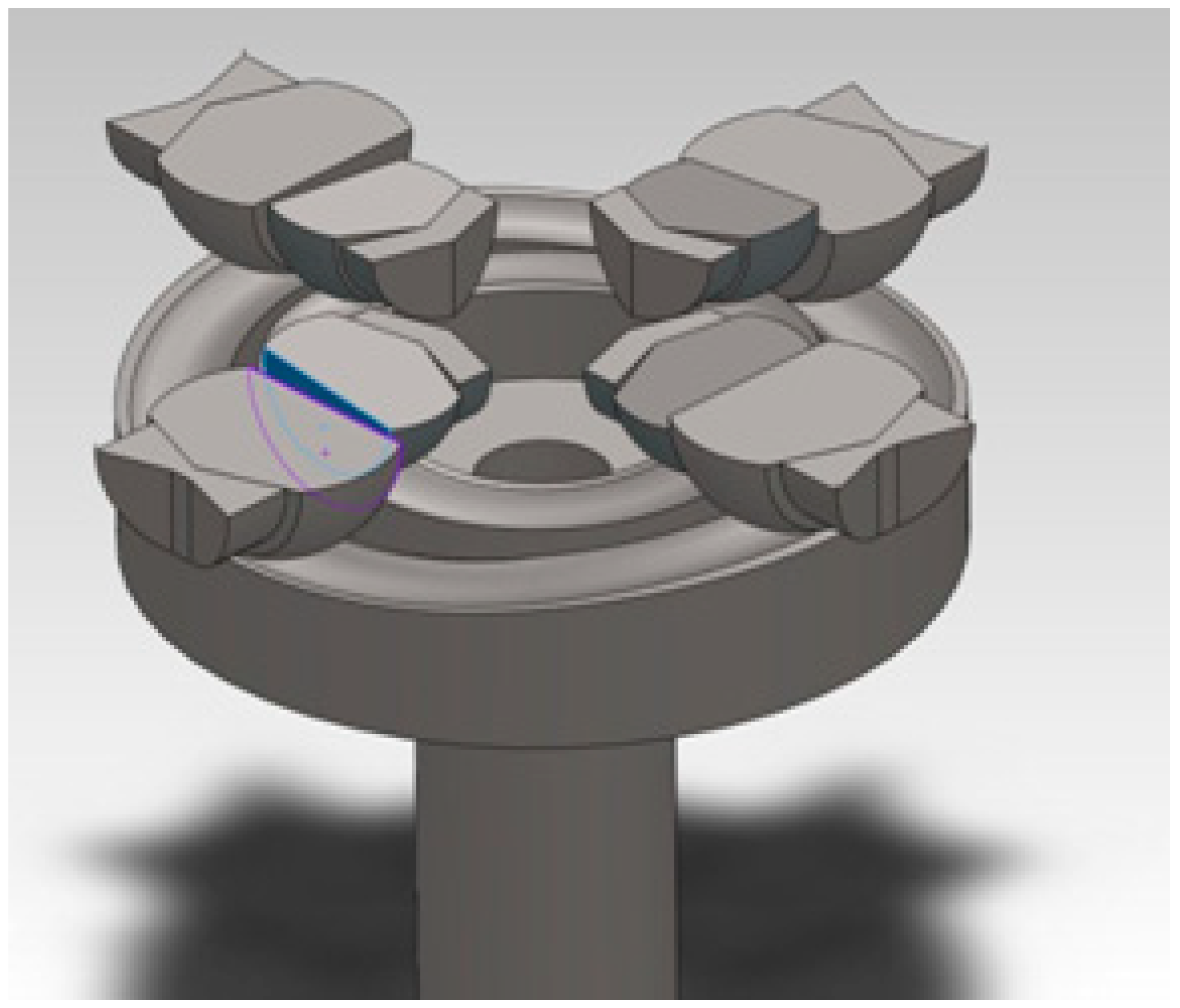
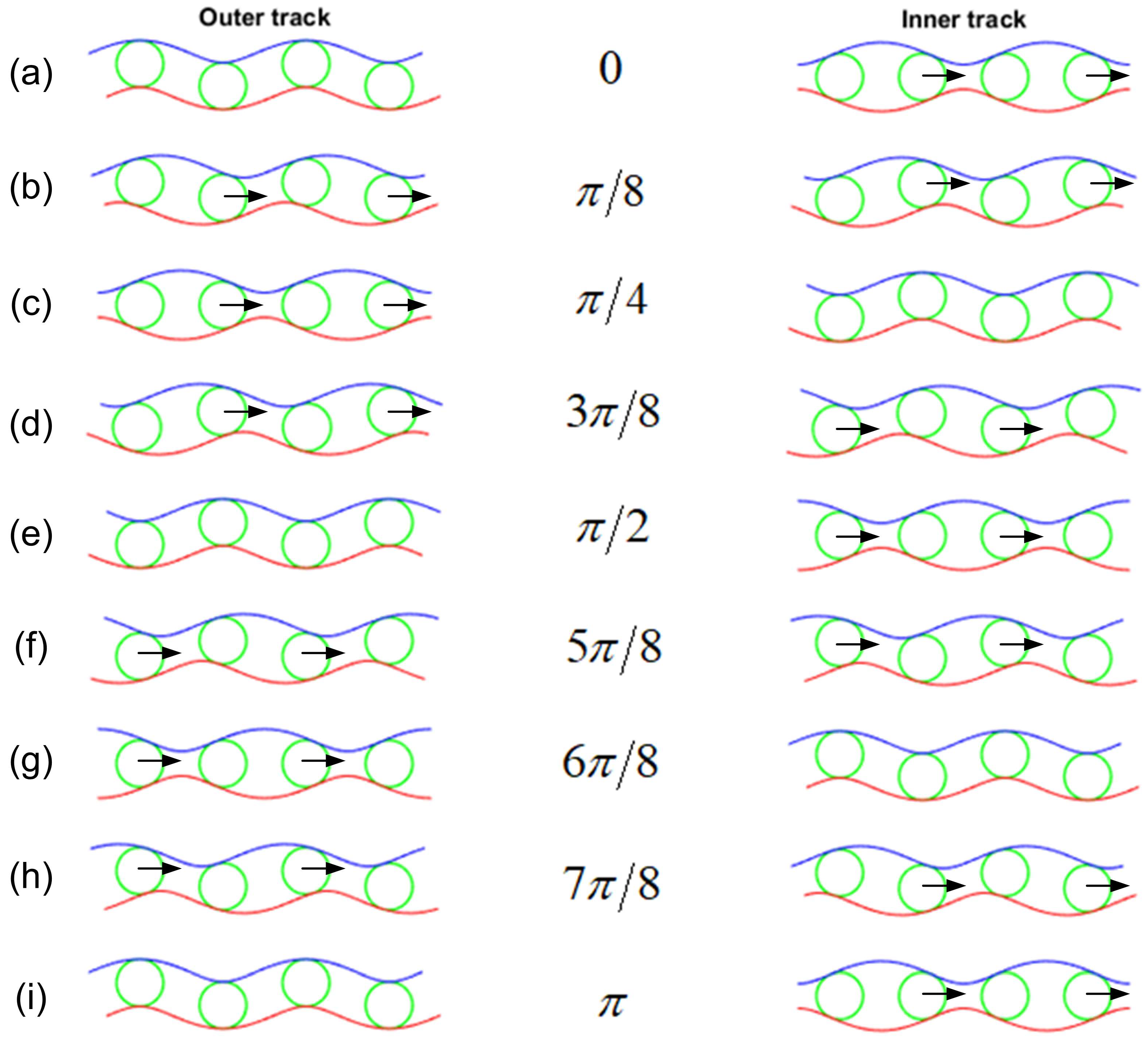
- At the angle 0°, all four rollers of the outer track hit the tops of the cam profiles (see also Figure 8), while those of the inner track do not.
- At the angle 45°, all four rollers of the inner track hit the tops of the cam profiles, while those of the outer track do not.
- At the angle 90°, all four rollers of the outer track hit the tops of the cam profiles, while those of the inner track do not.
- At the angle 135°, all four rollers of the inner track hit the tops of the cam profiles, while those of the outer track do not.
- At the angle 180°, all four rollers of the outer track hit the tops of the cam profiles (see also Figure 8), while those of the inner track do not.
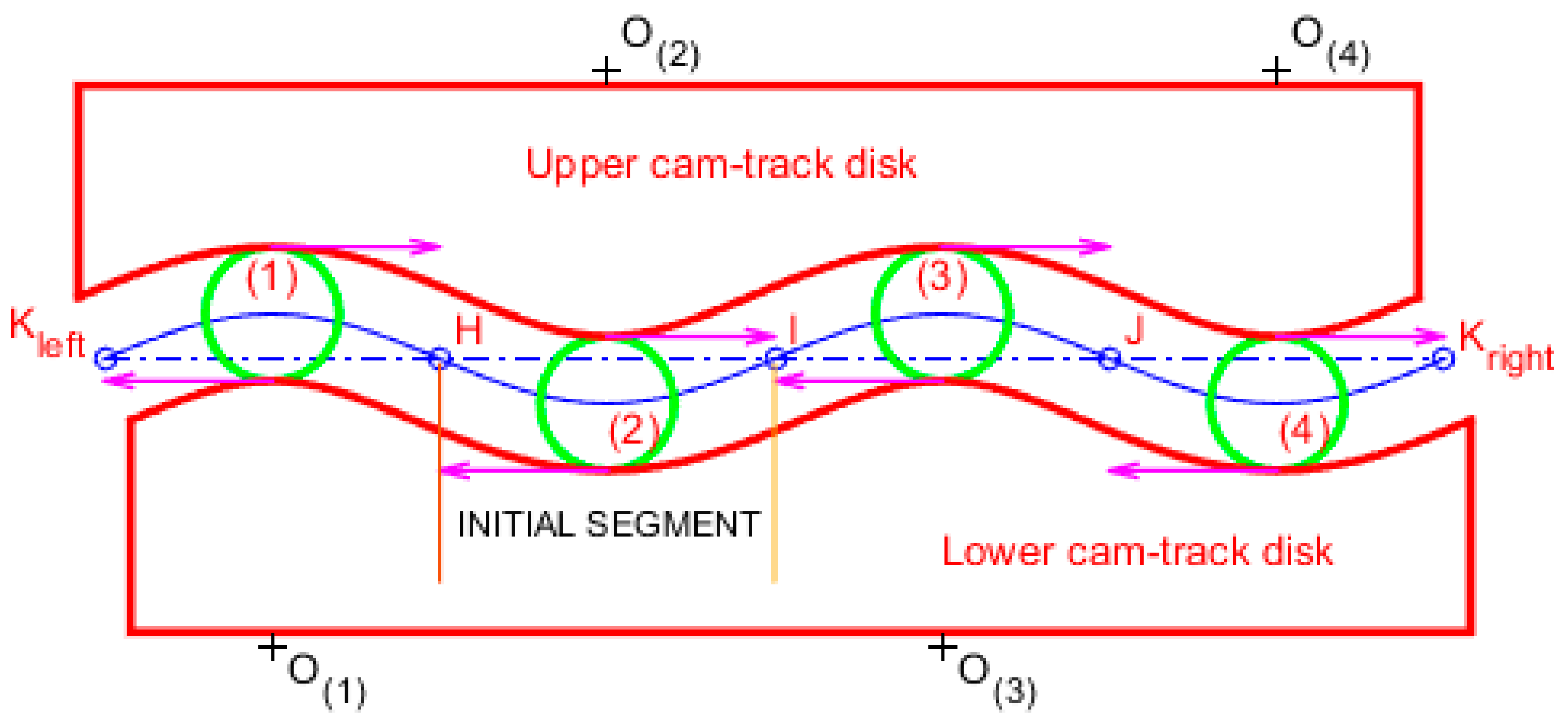
- Two out of the four rollers in the outer tracks are active, pushing them in the circumferential direction (thus transferring part of the power).
- Two out of the four rollers in the inner tracks are active, pushing them in the circumferential direction (thus transferring the rest part of the power).
9. Discussion
9.1. Other Patents on Gearless Differentials
9.2. Overall Advantages of the Proposed Concept
9.3. Design Aspects of the Present Concept
9.4. Other Applications
10. Conclusions
- (1)
- Ideal (pure) rolling (without sliding) of a roller on the two surfaces of cams (profiled plates) is achieved when the center of mass of the roller moves along a circular arc bounded by a given central angle.
- (2)
- If this design concept is applied to an automotive differential for an even number of repetitions, it leads to two identical cam-track disks (i.e., symmetrical differential), thereby saving manufacturing and storage costs.
- (3)
- If the central angle is small, self-regulation and blocking are achieved through the principle of the inclined plane.
- (4)
- The proper selection of particular dimensional parameters, such as double curvature, leads to mechanical stresses, which are within the usual allowable limits.
- (5)
- A weakness of this study is that elastic deformation of the cam-track disks has not been considered.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Quantity | Explanation |
| Diameter and radius of cam-track disks (outer and inner). | |
| Diameter ratio . | |
| Radius of rollers (outer and inner track). | |
| Diameters of friction disks (outer and inner). | |
| Equivalent diameter of frictions disks (with uniform pressure). | |
| Coefficient of friction on friction disks. | |
| Central angle (outer and inner track). | |
| Contact angle (outer and inner track). | |
| Torque transmitted from the geared crown to the totality of two cam-track disks. | |
| Torque transmitted to each cam-track disk. | |
| Circumferential force at each active roller (outer and inner track). | |
| Normal force on cam-track disk transmitted by active roller (outer and inner track). | |
| Circumferential force on cam-track disk transmitted by active roller (outer and inner track). | |
| Axial force on cam-track disk transmitted by active roller (outer and inner track). |
Appendix A
References
- Bahk, C.-J.; Parker, R.G. Analytical investigation of tooth profile modification effects on planetary gear dynamics. Mech. Mach. Theory 2013, 70, 298–319. [Google Scholar] [CrossRef]
- Huai, C.; Zhao, Y. Meshing theory and tooth profile geometry of toroidal surface enveloping conical worm drive. Mech. Mach. Theory 2019, 134, 476–498. [Google Scholar] [CrossRef]
- Ghosh, S.S.; Chakraborty, G. On optimal tooth profile modification for reduction of vibration and noise in spur gear pairs. Mech. Mach. Theory 2016, 105, 145–163. [Google Scholar] [CrossRef]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Sakaridis, E.; Spitas, V.; Spitas, C. Non-linear modeling of gear drive dynamics incorporating intermittent tooth contact analysis and tooth eigenvibrations. Mech. Mach. Theory 2019, 136, 307–333. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Feng, Z. Dynamic modeling of gearbox faults: A review. Mech. Syst. Signal Process. 2018, 98, 852–876. [Google Scholar] [CrossRef]
- Mihailidis, A.; Nerantzis, I. Recent Developments in Automotive Differential Design. In Power Transmissions, Mechanisms and Machine Science; Dobre, G., Ed.; Springer Science + Business Media: Dordrecht, The Netherlands, 2013; Volume 13, pp. 125–140. [Google Scholar] [CrossRef]
- Bai, S.; Angeles, J. The design of spherical multilobe-cam mechanisms. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 473–482. [Google Scholar] [CrossRef]
- Chaudhary, M.; Angeles, J.; Morozov, A. Design of a Spherical Cam-Roller Mechanism for an Automotive Differential. Trans. Can. Soc. Mech. Eng. 2016, 40, 243–252. [Google Scholar] [CrossRef]
- Butterfield, S.; Smith, J.; Petch, D.; Sullivan, B.; Smith, P.; Pierce, K. Advanced Gearless Drivetrain-Phase I Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2012. [Google Scholar] [CrossRef]
- Andersen, S.B. Design and Optimization of Gearless Drives Using Multi-Physics Approach. Ph.D. Thesis, Technical University of Denmark (DTU), Lyngby, Denmark, 2012. [Google Scholar]
- Chau, K.; Lee, C. Development of Reliable Gearless Motors for Electric Vehicles. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017. [Google Scholar] [CrossRef]
- Sheu, K.-B.; Chien, C.-W.; Chiou, S.-T.; Lai, T.-S. Kinetostatic analysis of a roller drive. Mech. Mach. Theory 2004, 39, 819–837. [Google Scholar] [CrossRef]
- de Price, D.S.J. Gears from the Greeks: The Antikythera mechanism—A calendar computer from ca. 80 BC. Trans. Am. Philos. Soc. New Ser. 1974, 64, 1–70. [Google Scholar] [CrossRef]
- Mooers, L.P. Power Transmitting Mechanism for Automobiles. USA Patent No. 832991, 9 October 1906. [Google Scholar]
- Patch, H.M. Differential Power Transmission Device. USA Patent No. 1283283, 29 October 1918. [Google Scholar]
- Ford, A.F. Gearless Differential. US Patent No. 1897555, 14 February 1933. [Google Scholar]
- Beucher, J.J. Ausgleichsgetriebe Besonders für Kraftfahrzeuge. Deutsches Patentschrift No. 741812, 12 March 1943. [Google Scholar]
- Randall, R.R. Gearless Differential. Patent No. 2651214, 8 September 1953. [Google Scholar]
- Altmann, W.E. Self-locking Differential Gear. USA Patent No. 296738, 10 January 1961. [Google Scholar]
- Tsiriggakis, T. Differential Gear. USA Patent No. 4509388, 9 April 1985. [Google Scholar]
- Tsiriggakis, T. Differential Getriebe. Europaisches Patentamt No. 0066122/B1, 15 May 1985. [Google Scholar]
- Provatidis, C.G.; Kalligeros, C.; Spitas, V. Design considerations and simulation of a rolling-contact gearless automotive differential. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023. [Google Scholar] [CrossRef]
- Dudley, D.W. Gear Handbook: The Design, Manufacture, and Application of Gears; McGraw-Hill: New York, NY, USA, 1962. [Google Scholar]
- Niemann, G.; Winter, H.; Höhn, B.-R.; Stahl, K. Maschienenelemente 1: Konstruktion und Berechnung von Verbindungen, Lagern, Wellen; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Freudenstein, F.; Soylemez, E. On the motion of spheres between two parallel planes. ASME J. Eng. Ind. 1975, 97, 294–302. [Google Scholar] [CrossRef]
- Koetsier, T. Mechanism and Machine Science: Its History and Its Identity. In International Symposium on History of Machines and Mechanisms-Proceedings HMM 2000; Ceccarelli, M., Ed.; Springer Science + Business Media: Dordrecht, The Netherlands, 2000; pp. 5–24. [Google Scholar]
- Kozhevnikov, S.N.; Antonyuk, E.Y. Synthesis of a Cam-Differential Mechanism with Periodic Dwell of the Output Link. Mech. Mach. Theory 1974, 9, 219–229. [Google Scholar] [CrossRef]
- Ghosh, A.; Yadav, R.P. Synthesis of cam-follower systems with rolling contact. Mech. Mach. Theory 1983, 18, 49–56. [Google Scholar] [CrossRef]
- Kerle, H.; Corves, B.; Hüsing, M. Getriebetechnik; Springer: Wiesbaden, Germany, 2015. [Google Scholar]
- Nagler, N.; Lohrengel, A. Improved design criterion for frictionally engaged contacts in overrunning clutches. Forsch. Ing. 2021, 85, 1053–1063. [Google Scholar] [CrossRef]
- Terada, H. The Development of gearless reducers with rolling balls. J. Mech. Sci. Technol. 2010, 24, 189–195. [Google Scholar] [CrossRef]
- Ding, J.; Wei, Y.; Liu, L.; Geng, T. Novel design method for constrained conjugate contact curves of line gears based on rolling-up of pitch pattern. J. Mech. Sci. Technol. 2022, 36, 4535–4548. [Google Scholar] [CrossRef]
- Lehman, M. Sinoiden Getriebe. Konstruktion 1981, 33, 109–112. [Google Scholar]
- Liu, D.; Ren, T.; Jin, X. Geometrical model and tooth analysis of undulating face gear. Mech. Mach. Theory 2015, 86, 140–155. [Google Scholar] [CrossRef]
- Uicker, J.E.; Pennock, G.R.; Shigley, J.E. Theory of Machines and Mechanisms, 5th ed.; Oxford University Press: New York, NY, USA, 2017; pp. 164–166. [Google Scholar]
- Bottema, O.; Roth, B. Theoretical Kinematics; Dover: Mineola, NY, USA, 1990; pp. 21+211–212. [Google Scholar]
- Wang, Q.J.; Zhu, D. Hertz Theory: Contact of Ellipsoidal Surfaces. In Encyclopedia of Tribology, 1st ed.; Wang, Q.J., Chung, Y.-W., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; p. 1650. [Google Scholar]
- Norton, R.L. Machine Design: An integrated Approach, 3rd ed.; Pearson International Edition: Upper Saddle River, NJ, USA, 2006; p. 887. [Google Scholar]
- Spotts, M.F.; Shaup, T.E. Design of Machine Elements. Prentice-Hall: Upper Saddle River, NJ, USA, 1998; p. 337. [Google Scholar]
- Roth, K. Konstruieren mit Konstruktions-Katalogen; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Input torque (applied to the crown attached to the cage/retainer) | 260 Nm |
| Number of rolling elements at each cam track | 4 |
| Phase-difference between outer and inner cam track | 45° |
| Diameter of outer cam track: | 85 mm |
| Diameter of inner cam track: | 50 mm |
| Radius of rolling element in the outer track: | 15 mm |
| Radius of rolling element in the inner track: | 12 mm |
| Outer diameter of friction disk: | 95 mm |
| Inner diameter of friction disk: | 45 mm |
| Coefficient of friction: | 0.066 |
| Inclination angle (half the central angle) of outer track: | 15° |
| Inclination angle (half the central angle) of inner track: | 27.25° |
| Simplified Model | Finite Element Analysis (Ref. [23]) | ||
|---|---|---|---|
| Outer Track | Inner Track | Outer Track | Inner Track |
| 1.6 | 1.2 | 1.3 | 0.8 |
| Simplified Model: Equation (30) | |||
|---|---|---|---|
| Outer Track | Inner Track | Outer Track | Inner Track |
| 1.57 | 1.20 | ||
| 1.52 | 1.16 | ||
| 1.46 | 1.12 | ||
| 1.40 | 1.07 | ||
| 1.34 | 1.02 | ||
| 1.26 | 0.96 | ||
| 1.18 | 0.90 | ||
| Simplified Model: Equation (30) | |||
|---|---|---|---|
| Outer Track | Inner Track | Outer Track | Inner Track |
| 1.5211 | 1.1611 | ||
| 1.5690 | 1.1953 | ||
| 1.6239 | 1.2351 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Provatidis, C.G. Power Transmission Using Circular Elements Bounded by Given Central Angle in Rolling Contact. Eng 2023, 4, 2309-2335. https://doi.org/10.3390/eng4030132
Provatidis CG. Power Transmission Using Circular Elements Bounded by Given Central Angle in Rolling Contact. Eng. 2023; 4(3):2309-2335. https://doi.org/10.3390/eng4030132
Chicago/Turabian StyleProvatidis, Christopher G. 2023. "Power Transmission Using Circular Elements Bounded by Given Central Angle in Rolling Contact" Eng 4, no. 3: 2309-2335. https://doi.org/10.3390/eng4030132
APA StyleProvatidis, C. G. (2023). Power Transmission Using Circular Elements Bounded by Given Central Angle in Rolling Contact. Eng, 4(3), 2309-2335. https://doi.org/10.3390/eng4030132