
Optimum Path Planning Using Dragonfly-Fuzzy Hybrid Controller for Autonomous Vehicle



Abstract
:1. Introduction
2. Path-Planning Algorithms
2.1. Dragonfly Algorithm
- The dragonfly algorithm’s segregation principle pertains to the internal avoidance of collisions with other individuals within the algorithm’s proximity. This concept is expressed mathematically in Equation (2).
- 2.
- The concept of alignment () in the given context signifies the synchronization of velocities among neighboring individuals within the same group. This mathematical representation is given in Equation (3).
- 3.
- Cohesion in this context signifies the inclination of individuals to move towards the center of the mass within their neighborhood. This tendency is expressed mathematically, as illustrated in Equation (4).
- 4.
- Attraction in this context signifies the food source, which is mathematically represented in Equation (5).
- 5.
- Distraction represents the distraction from the enemy as shown in the Equation (6).
| Algorithm 1 Dragonfly Algorithm |
| # Dragonfly algorithm # Complexity analysis: O(N), where N is the number of iterations def dragonfly_algorithm(): # Initialization population = initialize_population() step_vectors = initialize_step_vectors() # Iterative optimization loop while not end_condition_satisfied(): # Objective value calculation calculate_objective_values(population) # Update food source and enemy update_food_source_and_enemy() # Update factors: separation, alignment, cohesion, food, and enemy update_factors() # Calculate and update vectors using equations calculate_and_update_vectors() # Update neighboring radius update_neighboring_radius() # Update position and velocity vectors based on neighbors for dragonfly in population: if dragonfly_has_neighboring_dragonflies(dragonfly): update_velocity_and_position(dragonfly) else: update_position_levy_flight(dragonfly) # Check and correct new positions based on variable boundaries check_and_correct_positions(dragonfly) # End of the algorithm # Time complexity: O(N), where N is the number of iterations |
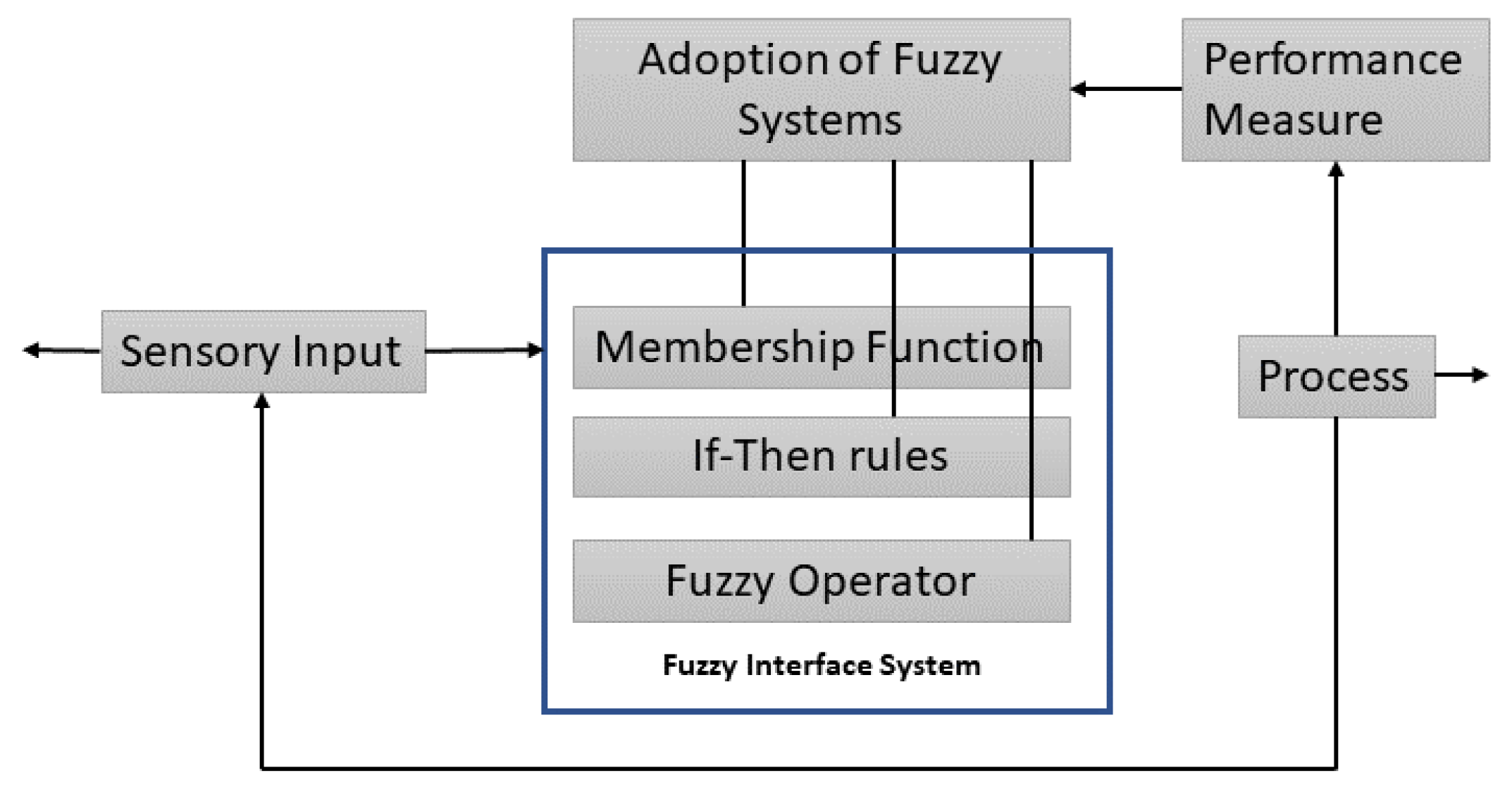
2.2. Fuzzy Logic Concept
- •
- Fuzzification: This involves employing membership functions to delineate input variables.
- •
- Inference and aggregation: This factor determines the final output resulting from fuzzy rules, accomplished through a process of inference and aggregation.
- •
- Defuzzification: The transformation of fuzzy-based output into a precise value is achieved through the process of defuzzification.
3. Dragonfly–Fuzzy Hybrid Controller
- If the front obstacle distance (FOD) is negative (N), the left obstacle distance (LOD) is negative (N), and the right obstacle distance (ROD) is positive (F), then the heading angle (HA) is positive, the left velocity (LV) is slow, and the right velocity (RV) is fast.
- If the FOD is medium (M), the LOD is negative (N), and the ROD is positive (F), then the HA is zero, the LV is medium, and the RV is medium.
- If the FOD is positive (F), the LOD is negative (N), and the ROD is positive (F), then the HA is negative, the LV is fast, and the RV is slow.
- If the FOD is negative (N), the LOD is medium (M), and the ROD is positive (F), then the HA is positive, the LV is slow, and the RV is fast.
- If the FOD is medium (M), the LOD is medium (M), and the ROD is positive (F), then the HA is zero, the LV is medium, and the RV is medium.
- If the FOD is positive (F), the LOD is medium (M), and the ROD is positive (F), then the HA is negative, the LV is fast, and the RV is slow.
- If the FOD is negative (N), the LOD is negative (N), and the ROD is negative (N), then the HA is positive, the LV is slow, and the RV is fast.
- If the FOD is medium (M), the LOD is negative (N), and the ROD is negative (N), then the HA is zero, the LV is medium, and the RV is medium.
- If the FOD is positive (F), the LOD is negative (N), and the ROD is negative (N), then the HA is negative, the LV is Fast, and the RV is slow.
- If the FOD is negative (N), the LOD is medium (M), and the ROD is negative (N), then the HA is positive, the LV is slow, and the RV is fast.
4. Experimental and Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oleari, F.; Magnani, M.; Ronzoni, D.; Sabattini, L. Industrial AGVs: Toward a pervasive diffusion in modern factory warehouses. In Proceedings of the 2014 IEEE 10th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 4–6 September 2014; pp. 233–238. [Google Scholar]
- Monios, J.; Bergqvist, R. Logistics and the networked society: A conceptual framework for smart network business models using electric autonomous vehicles (EAVs). Technol. Forecast. Soc. Chang. 2020, 151, 119824. [Google Scholar] [CrossRef]
- Nakhaeinia, D.; Tang, S.H.; Noor, S.M.; Motlagh, O. A review of control architectures for autonomous navigation of mobile robots. Int. J. Phys. Sci. 2011, 6, 169–174. [Google Scholar]
- Sudhakara, P.; Ganapathy, V.; Priyadharshini, B.; Sundaran, K. Obstacle avoidance and navigation planning of a wheeled mobile robot using amended artificial potential field method. Procedia Comput. Sci. 2018, 133, 998–1004. [Google Scholar] [CrossRef]
- Yazici, A.; Kirlik, G.; Parlaktuna, O.; Sipahioglu, A. A dynamic path planning approach for multirobot sensor-based coverage considering energy constraints. IEEE Trans. Cybern. 2013, 44, 305–314. [Google Scholar] [CrossRef]
- Patle, B.; Patel, B.; Jha, A. Rule-Based Fuzzy Decision Path Planning Approach for Mobile Robot. In Proceedings of the 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 16–18 August 2018; pp. 1–7. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Karaman, S.; Walter, M.R.; Perez, A.; Frazzoli, E.; Teller, S. Anytime motion planning using the RRT. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1478–1483. [Google Scholar]
- Hauer, F.; Tsiotras, P. Deformable Rapidly-Exploring Random Trees. In Proceedings of the Robotics: Science and Systems, Cambridge, MA, USA, 12–16 July 2017. [Google Scholar]
- Kavraki, L.; Latombe, J. Probabilistic roadmaps for robot path planning. In Pratical Motion Planning in Robotics: Current Aproaches and Future Challenges; Wiley: Hoboken, NJ, USA, 1998; pp. 33–53. [Google Scholar]
- Sun, Z.; Wu, J.; Yang, J.; Huang, Y.; Li, C.; Li, D. Path planning for GEO-UAV bistatic SAR using constrained adaptive multiobjective differential evolution. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6444–6457. [Google Scholar] [CrossRef]
- Dujari, R.; Patel, B.; Patle, B. Adaptive Mayfly Algorithm for UAV Path Planning and Obstacle Avoidance in Indoor Environment. In Proceedings of the 2023 International Conference on Network, Multimedia and Information Technology (NMITCON), Bengaluru, India, 1–2 September 2023; pp. 1–7. [Google Scholar]
- Yi, X.; Zhu, A.; Yang, S. MPPTM: A Bio-Inspired Approach for Online Path Planning and High-Accuracy Tracking of UAVs. Front. Neurorobot. 2022, 15, 798428. [Google Scholar] [CrossRef] [PubMed]
- Ganapathy, V.; Sudhakara, P.; Jie, T.J.; Parasuraman, S. Mobile robot navigation using amended ant colony optimization algorithm. Indian J. Sci. Technol. 2016, 9, 1–10. [Google Scholar] [CrossRef]
- Xin, J.; Li, S.; Sheng, J.; Zhang, Y.; Cui, Y. Application of improved particle swarm optimization for navigation of unmanned surface vehicles. Sensors 2019, 19, 3096. [Google Scholar] [CrossRef] [PubMed]
- Patel, B.; Patle, B. Analysis of firefly–fuzzy hybrid algorithm for navigation of quad-rotor unmanned aerial vehicle. Inventions 2020, 5, 48. [Google Scholar] [CrossRef]
- Xing, B.; Gao, W.-J.; Xing, B.; Gao, W.-J. Fruit fly optimization algorithm. In Innovative Computational Intelligence: A Rough Guide to 134 Clever Algorithms; Springer: Cham, Switzerland, 2014; pp. 167–170. [Google Scholar]
- Wang, G.-G.; Chu, H.E.; Mirjalili, S. Three-dimensional path planning for UCAV using an improved bat algorithm. Aerosp. Sci. Technol. 2016, 49, 231–238. [Google Scholar] [CrossRef]
- Liu, J.; Wei, X.; Huang, H. An improved grey wolf optimization algorithm and its application in path planning. IEEE Access 2021, 9, 121944–121956. [Google Scholar] [CrossRef]
- Meraihi, Y.; Gabis, A.B.; Mirjalili, S.; Ramdane-Cherif, A. Grasshopper optimization algorithm: Theory, variants, and applications. IEEE Access 2021, 9, 50001–50024. [Google Scholar] [CrossRef]
- Guruji, A.K.; Agarwal, H.; Parsediya, D. Time-efficient A* algorithm for robot path planning. Procedia Technol. 2016, 23, 144–149. [Google Scholar] [CrossRef]
- Antonelli, G.; Chiaverini, S.; Fusco, G. A fuzzy-logic-based approach for mobile robot path tracking. IEEE Trans. Fuzzy Syst. 2007, 15, 211–221. [Google Scholar] [CrossRef]
- Dubey, V.; Barde, S.; Patel, B. Obstacle Finding and Path Planning of Unmanned Vehicle by Hybrid Techniques. In Information Systems and Management Science, Proceedings of the 4th International Conference on Information Systems and Management Science (ISMS) 2021, Msida, Malta, 14–15 December 2021; Springer: Cham, Switzerland, 2022; pp. 28–36. [Google Scholar]
- Kanoon, Z.E.; Araji, A.; Abdullah, M.N. Enhancement of Cell Decomposition Path-Planning Algorithm for Autonomous Mobile Robot Based on an Intelligent Hybrid Optimization Method. Int. J. Intell. Eng. Syst. 2022, 15, 161–175. [Google Scholar]
- Murofushi, T.; Sugeno, M. Fuzzy control of model car. J. Robot. Soc. Jpn. 1988, 6, 536–541. [Google Scholar] [CrossRef]
- Langari, R. Past, present and future of fuzzy control: A case for application of fuzzy logic in hierarchical control. In Proceedings of the 18th International Conference of the North American Fuzzy Information Processing Society-NAFIPS (Cat. No. 99TH8397), New York, NY, USA, 10–12 June 1999; pp. 760–765. [Google Scholar]
- Berisha, J.; Bajrami, X.; Shala, A.; Likaj, R. Application of Fuzzy Logic Controller for obstacle detection and avoidance on real autonomous mobile robot. In Proceedings of the 2016 5th Mediterranean Conference on Embedded Computing (MECO), Bar, Montenegro, 12–16 June 2016; pp. 200–205. [Google Scholar]
- Fernando, T.; Gammulle, H.; Walgampaya, C. Fuzzy logic based mobile robot target tracking in dynamic hostile environment. In Proceedings of the 2015 IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), Shenzhen, China, 12–14 June 2015; pp. 1–6. [Google Scholar]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Luo, Q.; Miao, F.; Zhou, Y. Solving 0–1 knapsack problems by binary dragonfly algorithm. In Intelligent Computing Methodologies, Proceedings of the 13th International Conference, ICIC 2017, Liverpool, UK, 7–10 August 2017; Proceedings, Part III 13; Springer: Cham, Switzerland, 2017; pp. 491–502. [Google Scholar]
- Sawhney, R.; Jain, R. Modified binary dragonfly algorithm for feature selection in human papillomavirus-mediated disease treatment. In Proceedings of the 2018 International Conference on Communication, Computing and Internet of Things (IC3IoT), Chennai, India, 15–17 February 2018; pp. 91–95. [Google Scholar]
- Mafarja, M.; Aljarah, I.; Heidari, A.A.; Faris, H.; Fournier-Viger, P.; Li, X.; Mirjalili, S. Binary dragonfly optimization for feature selection using time-varying transfer functions. Knowl.-Based Syst. 2018, 161, 185–204. [Google Scholar] [CrossRef]
- Abuomar, L.; Al-Aubidy, K. Cooperative search and rescue with swarm of robots using binary dragonfly algoritlnn. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals & Devices (SSD), Yassmine Hammamet, Tunisia, 19–22 March 2018; pp. 653–659. [Google Scholar]
- Sayed, G.I.; Tharwat, A.; Hassanien, A.E. Chaotic dragonfly algorithm: An improved metaheuristic algorithm for feature selection. Appl. Intell. 2019, 49, 188–205. [Google Scholar] [CrossRef]
- Sambandam, R.K.; Jayaraman, S. Self-adaptive dragonfly based optimal thresholding for multilevel segmentation of digital images. J. King Saud Univ.-Comput. Inf. Sci. 2018, 30, 449–461. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W.; Huang, Y. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints. IEEE Trans. Veh. Technol. 2016, 66, 952–964. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Nguyen, A.-T.; Lauber, J.; Boada, M.J.L.; Boada, B.L. Event-triggered robust path tracking control considering roll stability under network-induced delays for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 48–58. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles. IEEE Trans. Veh. Technol. 2015, 65, 4033–4043. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Sun, X. Simultaneous path following and lateral stability control of 4WD-4WS autonomous electric vehicles with actuator saturation. Adv. Eng. Softw. 2019, 128, 46–54. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Joshi, M.M.; Zaveri, M.A. Reactive navigation of autonomous mobile robot using neuro-fuzzy system. Int. J. Robot. Autom. (IJRA) 2011, 2, 128. [Google Scholar]
- Patle, B.; Patel, B.; Pandey, A.; Sahu, O.; Parhi, D. Analysis of Firefly-Fuzzy Hybrid Controller for Wheeled Mobile Robot. In Proceedings of the 2019 3rd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 21–22 February 2019; pp. 187–194. [Google Scholar]
- Xiang, D.; Lin, H.; Ouyang, J.; Huang, D. Combined improved A* and greedy algorithm for path planning of multi-objective mobile robot. Sci. Rep. 2022, 12, 13273. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Linguistic Variable | Too Close (TC) | Very Close (VC) | Close (C) | Far (F) | Very Far (VF) | Too Far (TF) |
|---|---|---|---|---|---|---|
| LOD | 0.0 | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 |
| ROD | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 |
| FOD | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 | 0.0 |
| Linguistic Variable | Highly Negative (HN) | Negetive (N) | Zero (Z) | Positive (P) | Highly Postitive (HP) |
|---|---|---|---|---|---|
| Target heading angle (THA) | −180 | −120 | −10 | 10 | 60 |
| −120 | −60 | 0.0 | 60 | 60 | |
| −60 | 0 | 10 | 120 | 180 |
| Symbol | Description | Value |
|---|---|---|
| N | Dragonfly population size | 30 |
| T | Iteration count | 350 |
| s | Separation weight | 0.1 |
| a | Alignment weight | 0.1 |
| c | Cohesion weight | 0.7 |
| f | Food factor | 1 |
| e | Enemy factor | 1 |
| w | Inertia weight | 0.9–0.4 |
| r1, r2 | Random values | [0, 1] |
| C1 | Controlling parameter 1 | 1 |
| C2 | Controlling parameter 2 | 1 × 10−6 |
| S. No. | Controller | Simulation Path Length (cm) | Simulation Path Time (seconds) |
|---|---|---|---|
| 1 | Dragonfly | 120.4 | 11.8 |
| 2 | Fuzzy logic | 169.8 | 13.2 |
| 3 | DA–FL hybrid | 113.0 | 10.9 |
| S. No. | Controller | Experimental Path Length (cm) | Experimental Path Time (seconds) |
|---|---|---|---|
| 1 | Dragonfly | 126.22 | 12.6 |
| 2 | Fuzzy logic | 136.68 | 14 |
| 3 | DA–FL hybrid | 118.66 | 11.5 |
| Controller | Experimental Path Length (cm) | Simulation Path Length (cm) | % Error |
|---|---|---|---|
| Dragonfly | 126.3 | 120.4 | 4.58 |
| Fuzzy logic | 136.7 | 169.8 | 5.10 |
| DA–FL hybrid | 118.6 | 113.0 | 4.40 |
| Controller | Experimental Path Time (s) | Simulation Path Time (s) | % Error |
|---|---|---|---|
| Dragonfly | 12.6 | 11.8 | 5.80 |
| Fuzzy logic | 14 | 13.2 | 5.76 |
| DA–FL hybrid | 11.5 | 10.9 | 5.20 |
| Controller | Simulation Path Time (s) | Simulation Path Length (cm) | % Change Length with Dragonfly–Fuzzy | % Change Time with Dragonfly–Fuzzy |
|---|---|---|---|---|
Dragonfly–fuzzy (Figure 13b) | 20.8 | 143.0 | ---------- | -------- |
Neurofuzzy logic (Figure 13a) | 22.2 | 156.5 | +8.62 | +6.30 |
Dragonfly–fuzzy (Figure 14b) | 15.3 | 113.05 | ---------- | -------- |
Firefly–fuzzy (Figure 14a) | 17.2 | 118.0 | +4.2 | +11.04 |
Dragonfly–fuzzy (Figure 15b) | 16.3 | 126.0 | ---------- | -------- |
| A*–greedy (Figure 15a) | 18.2 | 131.0 | +3.9 | +11.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patel, B.; Dubey, V.; Barde, S.; Sharma, N. Optimum Path Planning Using Dragonfly-Fuzzy Hybrid Controller for Autonomous Vehicle. Eng 2024, 5, 246-265. https://doi.org/10.3390/eng5010013
Patel B, Dubey V, Barde S, Sharma N. Optimum Path Planning Using Dragonfly-Fuzzy Hybrid Controller for Autonomous Vehicle. Eng. 2024; 5(1):246-265. https://doi.org/10.3390/eng5010013
Chicago/Turabian StylePatel, Brijesh, Varsha Dubey, Snehlata Barde, and Nidhi Sharma. 2024. "Optimum Path Planning Using Dragonfly-Fuzzy Hybrid Controller for Autonomous Vehicle" Eng 5, no. 1: 246-265. https://doi.org/10.3390/eng5010013
APA StylePatel, B., Dubey, V., Barde, S., & Sharma, N. (2024). Optimum Path Planning Using Dragonfly-Fuzzy Hybrid Controller for Autonomous Vehicle. Eng, 5(1), 246-265. https://doi.org/10.3390/eng5010013