
A Study of 3D Digitisation Modalities for Crime Scene Investigation

 ,
,  , , , and
, , , and 
Abstract
:1. Introduction
- The prevention and study of a scene prior to and during an event;
- Analysis and documentation of a scene after an event;
- THe provision of 3D content in educational simulations that are based on Extended Reality technologies (i.e., Virtual Reality).
2. Related Work
3. Scanning Modalities
3.1. Laser Scanner
3.2. Photogrammetry
3.2.1. Aerial Photogrammetry
3.2.2. Terrestrial Photogrammetry
- A lack of sufficient illumination.
- A lack of visual texture often encountered on walls and ceilings. This is a problem because photogrammetric algorithms are based on the detection and establishment of point correspondences across the acquired images. When there is a lack of texture, no key points exist in the acquired images, making the results of photogrammetry unreliable.
- Surfaces of high reflectance, which exhibit illumination specularities when directly illuminated, such as metallic and glass objects, often found in indoor environments.
- A large number of occlusions due to the structure of human-made indoor rooms and furniture.
3.2.3. Photogrammetry Using Mobile Phones
3.2.4. Discussion
3.3. RGB-D Scanning
3.4. Hand-Held Optical and Inertial Scanning, with Real-Time Feedback
3.5. Discussion
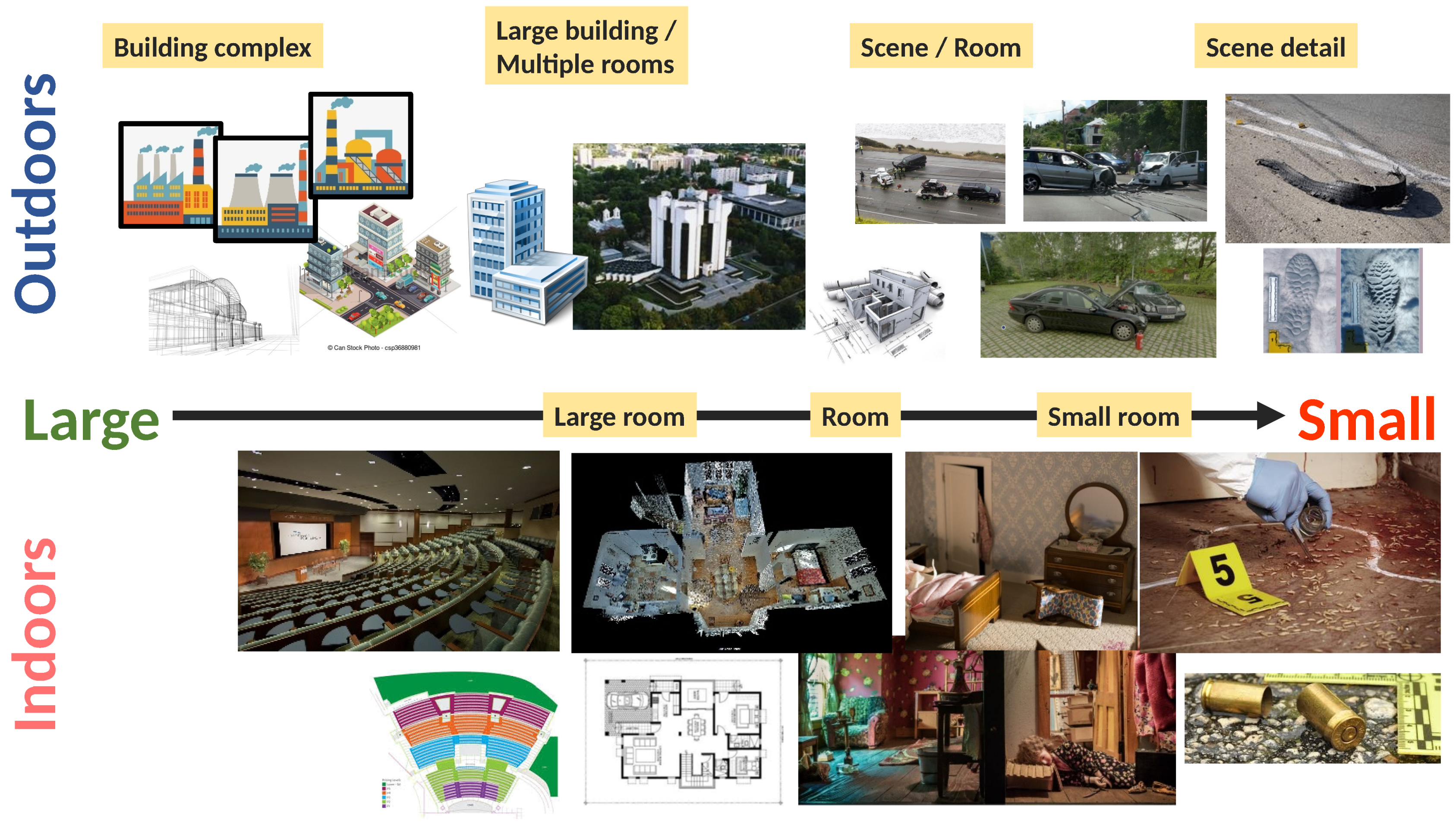
4. Guidelines for Each Use Case
4.1. Prevention of a Crime
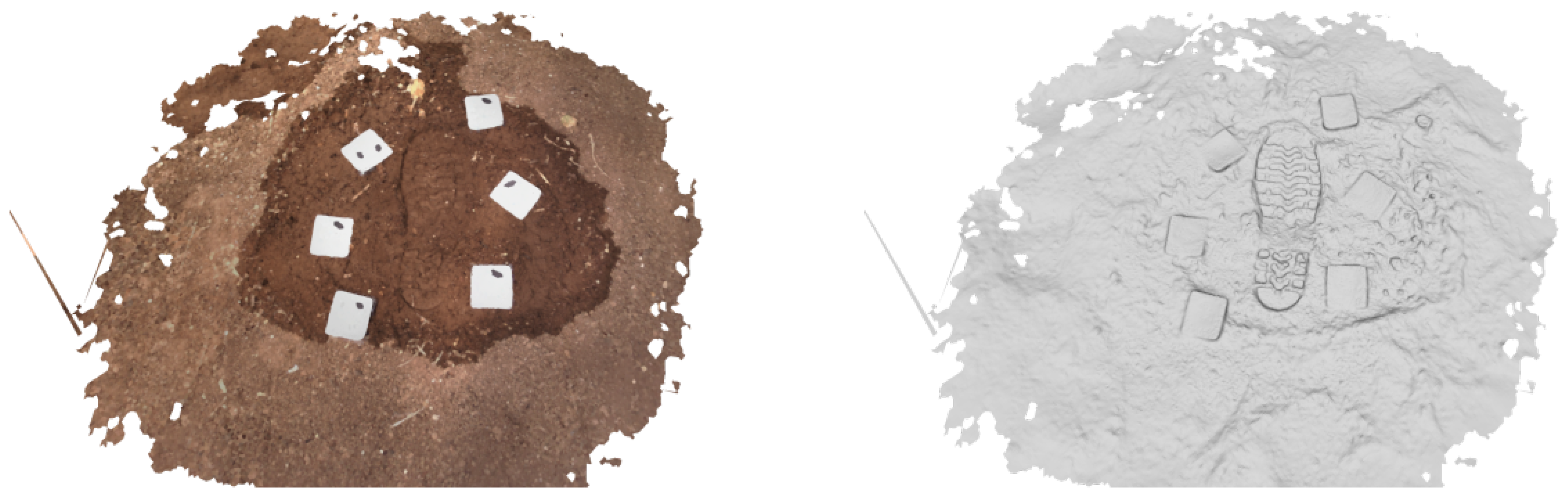
4.2. Analysis of a Crime Scene
- contains surfaces that are poor in structure, e.g., white walls;
- is cluttered, giving rise to occlusions and increasing the difficulty of the scanning process;
- contains shiny surfaces, e.g., the floor and polished surfaces.
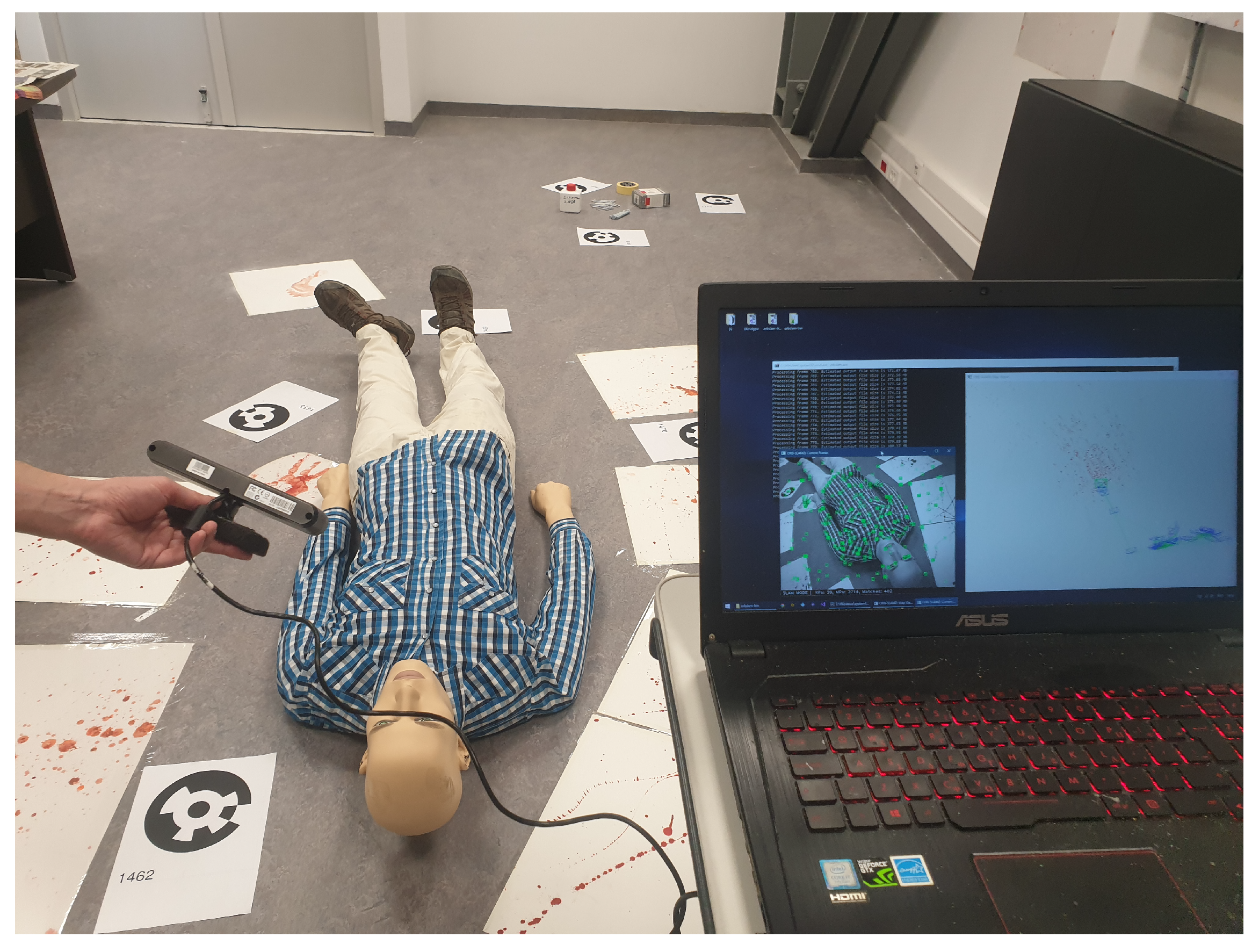
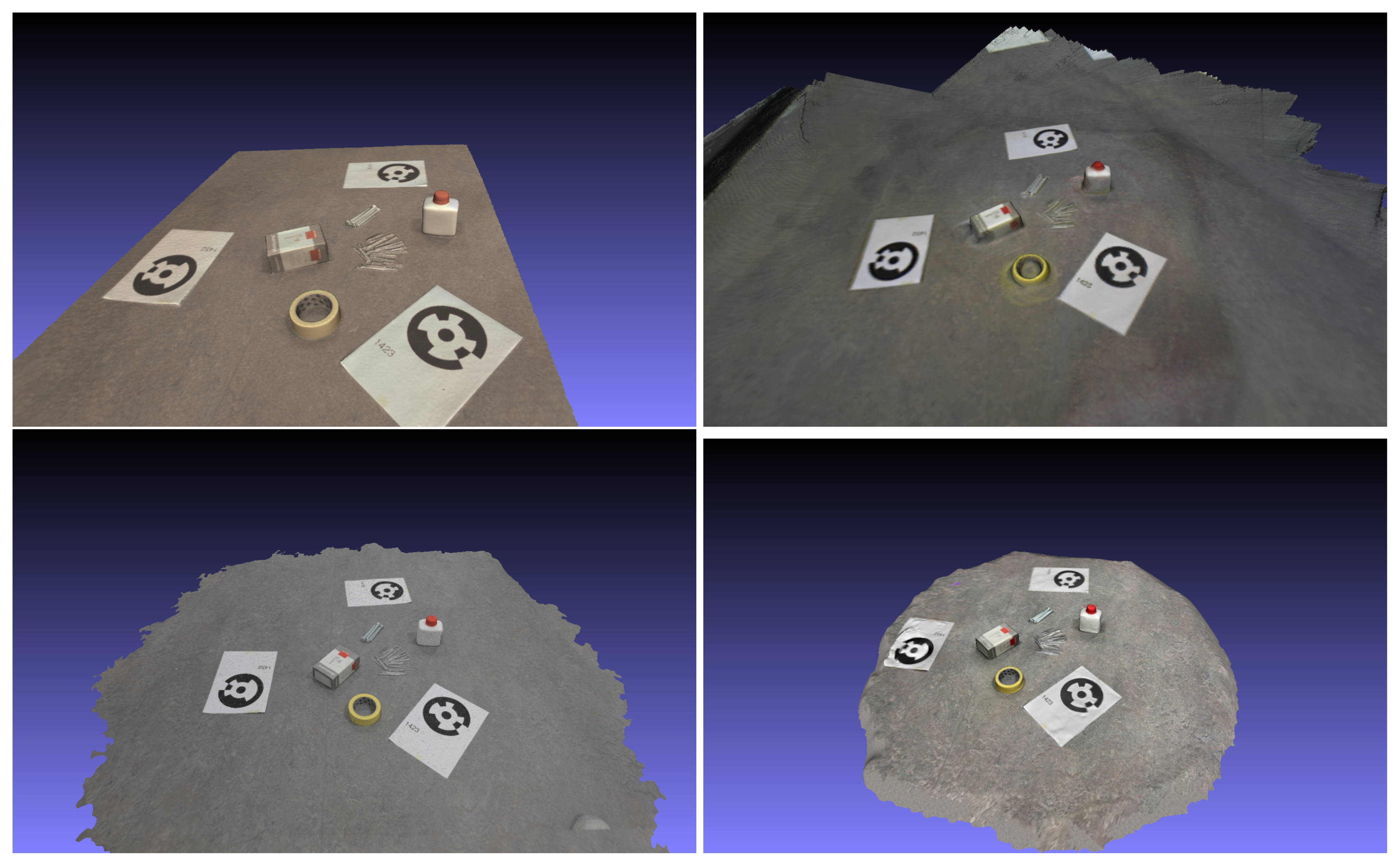
Special Case: Indoor Crime Scene
- Terrestrial laser scanner (FARO Focus M70)
- Handheld laser scanner (Faro Freestyle 3D X)
- Custom RGB-D scanner based on Asus XTION structured-light sensor
- DSLR for obtaining photos and Pix4D photogrammetry software
- iPhone 12 Pro Max and Trnio 3D Scanner application
4.3. Education of Stakeholders through VR Representation
- Reconstruct an empty scene;
- Separately scan items to be inserted in the scene;
- Assemble individual scans into a curated educational scene.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AR | Augmented reality |
| CAD | Computer-aided design |
| CSI | Crime scene investigation |
| DSLR | Digital single-lens reflex camera |
| IMU | Inertial measurement unit |
| FOV | Field of view |
| GCP | Ground control point |
| GIS | Geographic information system |
| GNSS | Global navigation satellite system |
| GPS | Global positioning system |
| LEA | Law enforcement agency |
| RGB | RGB color model (from red, green and blue components) |
| SLAM | Simultaneous localization and mapping |
| VR | Virtual reality |
References
- Osman, M.R.; Tahar, K.N. 3D accident reconstruction using low-cost imaging technique. Adv. Eng. Softw. 2016, 100, 231–237. [Google Scholar] [CrossRef]
- Kreul, D.; Thali, M.; Schweitzer, W. Case report: Forensic 3D-match of hair brush and scalp abrasions revealing dynamic brush deformation. J. Forensic Radiol. Imaging 2019, 16, 34–37. [Google Scholar] [CrossRef]
- Amamra, A.; Amara, Y.; Boumaza, K.; Benayad, A. Crime Scene Reconstruction with RGB-D Sensors. In Proceedings of the 2019 Federated Conference on Computer Science and Information Systems (FedCSIS), Leipzig, Germany, 1–4 September 2019; pp. 391–396. [Google Scholar]
- Le, Q.; Liscio, E. A comparative study between FARO Scene and FARO Zone 3D for area of origin analysis. Forensic Sci. Int. 2019, 301, 166–173. [Google Scholar] [CrossRef]
- Liscio, E.; Le, Q.; Guryn, H. Accuracy and reproducibility of bullet trajectories in FARO zone 3D. J. Forensic Sci. 2020, 65, 214–220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fahrni, S.; Delémont, O.; Campana, L.; Grabherr, S. An exploratory study toward the contribution of 3D surface scanning for association of an injury with its causing instrument. Int. J. Leg. Med. 2019, 133, 1167–1176. [Google Scholar] [CrossRef] [PubMed]
- Forensic Technology Center of Excellence. In Success Story: Advancing 3D Virtual Microscopy for Firearm Forensics; Forensic Technology Center of Excellence: Research Triangle Park, NC, USA, 2019.
- Wieczorek, T.; Przyłucki, R.; Lisok, J.; Smagór, A. Analysis of the Accuracy of Crime Scene Mapping Using 3D Laser Scanners. In International Workshop on Modeling Social Media; Springer: Cham, Swizerland, 2018; pp. 406–415. [Google Scholar]
- Zhang, W.; Kosiorek, D.A.; Brodeur, A.N. Application of Structured-Light 3-D Scanning to the Documentation of Plastic Fingerprint Impressions: A Quality Comparison with Traditional Photography. J. Forensic Sci. 2019, 65, 784–790. [Google Scholar] [CrossRef]
- Whelan, D.; Weggel, D.; Moss, J.; Howe, A. Post-Blast Investigative Tools for Structural Forensics by 3D Scene Reconstruction and Advanced Simulation. Natl. Crim. Justice Ref. Serv. 2019, 19, 252954. [Google Scholar]
- Cerreta, J.S.; Burgess, S.S.; Coleman, J. UAS for Public Safety Operations: A Comparison of UAS Point Clouds to Terrestrial LIDAR Point Cloud Data using a FARO Scanner. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 6. [Google Scholar] [CrossRef]
- Villa, C.; Jacobsen, C. The Application of Photogrammetry for Forensic 3D Recording of Crime Scenes, Evidence and People. In Essentials of Autopsy Practice: Reviews, Updates and Advances; Springer International Publishing: Cham, Swizerland, 2019; pp. 1–18. [Google Scholar] [CrossRef]
- Luchowski, L.; Pojda, D.; Tomaka, A.A.; Skabek, K.; Kowalski, P. Multimodal Imagery in Forensic Incident Scene Documentation. Sensors 2021, 21, 1407. [Google Scholar] [CrossRef]
- Le, Q.; Liscio, E. FARO Zone 3D Area of Origin Tools with Handheld 3D Data. J. Assoc. Crime Scene Reconstr. 2019, 23, 1–10. [Google Scholar]
- Esaias, O.; Noonan, G.W.; Everist, S.; Roberts, M.; Thompson, C.; Krosch, M.N. Improved Area of Origin Estimation for Bloodstain Pattern Analysis Using 3D Scanning. J. Forensic Sci. 2019, 65, 722–728. [Google Scholar] [CrossRef]
- Liscio, E.; Bozek, P.; Guryn, H.; Le, Q. Observations and 3D Analysis of Controlled Cast-Off Stains. J. Forensic Sci. 2020, 65, 1128–1140. [Google Scholar] [CrossRef]
- Süncksen, M.; Teistler, M.; Hamester, F.; Ebert, L.C. Preparing and guiding forensic crime scene inspections in virtual reality. In Proceedings of the Mensch und Computer, Hamburg, Germany, 8–11 September 2019; pp. 755–758. [Google Scholar]
- Mach, V.; Valouch, J.; Adámek, M.; Ševčík, J. Virtual reality–level of immersion within the crime investigation. In MATEC Web of Conferences; EDP Sciences: Les Ulis Cedex A, France, 2019; Volume 292, p. 01031. [Google Scholar]
- Sieberth, T.; Dobay, A.; Affolter, R.; Ebert, L.C. Applying virtual reality in forensics–a virtual scene walkthrough. Forensic Sci. Med. Pathol. 2019, 15, 41–47. [Google Scholar] [CrossRef]
- Sieberth, T.; Dobay, A.; Affolter, R.; Ebert, L. A toolbox for the rapid prototyping of crime scene reconstructions in virtual reality. Forensic Sci. Int. 2019, 305, 110006. [Google Scholar] [CrossRef] [PubMed]
- Ebert, L.C.; Ptacek, W.; Breitbeck, R.; Fürst, M.; Kronreif, G.; Martinez, R.M.; Thali, M.; Flach, P.M. Virtobot 2.0: The future of automated surface documentation and CT-guided needle placement in forensic medicine. Forensic Sci. Med. Pathol. 2014, 10, 179–186. [Google Scholar] [CrossRef] [PubMed]
- Norman, D.G.; Wade, K.A.; Williams, M.A.; Watson, D.G. Caught Virtually Lying—Crime Scenes in Virtual Reality Help to Expose Suspects’ Concealed Recognition. J. Appl. Res. Mem. Cogn. 2020, 9, 118–127. [Google Scholar] [CrossRef]
- Wang, J.; Li, Z.; Hu, W.; Shao, Y.; Wang, L.; Wu, R.; Ma, K.; Zou, D.; Chen, Y. Virtual reality and integrated crime scene scanning for immersive and heterogeneous crime scene reconstruction. Forensic Sci. Int. 2019, 303, 109943. [Google Scholar] [CrossRef]
- Tredinnick, R.; Smith, S.; Ponto, K. A cost-benefit analysis of 3D scanning technology for crime scene investigation. Forensic Sci. Int. Rep. 2019, 1, 100025. [Google Scholar] [CrossRef]
- Liu, S. Three-dimension Point Cloud Technology and Intelligent Extraction of Trace Evidence at the Scene of Crime. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1237, p. 042027. [Google Scholar]
- Johnson, A.; Pandey, A. Three-dimensional scanning-A futuristic technology in forensic anthropology. J. Indian Acad. Forensic Med. 2019, 41, 128–131. [Google Scholar] [CrossRef]
- Bahirat, K.; Prabhakaran, B. A study on lidar data forensics. In Proceedings of the 2017 IEEE International Conference on Multimedia and Expo (ICME), Hong Kong, China, 10–14 July 2017; pp. 679–684. [Google Scholar]
- Berezowski, V.; Mallett, X.; Moffat, I. Geomatic techniques in forensic science: A review. Sci. Justice 2020, 60, 99–107. [Google Scholar] [CrossRef]
- Artec Europe. Artec Ray Laser Scanner. Available online: https://www.artec3d.com/portable-3d-scanners/laser-ray-v2 (accessed on 6 July 2021).
- FARO Technologies. FARO Focus Laser Scanners. Available online: https://www.faro.com/en/Products/Hardware/Focus-Laser-Scanners (accessed on 6 July 2021).
- Leica Geosystems AG. Leica ScanStation P40/P30—High-Definition 3D Laser Scanning Solution. Available online: https://leica-geosystems.com/products/laser-scanners/scanners/leica-scanstation-p40–p30 (accessed on 6 July 2021).
- Leica Geosystems AG. Leica ScanStation P50—Long Range 3D Terrestrial Laser Scanner. Available online: https://leica-geosystems.com/products/laser-scanners/scanners/leica-scanstation-p50 (accessed on 6 July 2021).
- Leica Geosystems AG. Leica RTC360 3D Laser Scanner. Available online: https://leica-geosystems.com/products/laser-scanners/scanners/leica-rtc360 (accessed on 6 July 2021).
- Zoller + Fröhlich GmbH. Z + F IMAGER® 5010X, 3D Laser Scanner. Available online: https://www.zf-laser.com/Z-F-IMAGER-R-5010X.3d_laser_scanner.0.html?&L=1 (accessed on 6 July 2021).
- Teledyne Optech. Polaris Terrestrial Laser Scanner (TLS) Series. Available online: https://www.teledyneoptech.com/en/products/static-3d-survey/polaris/ (accessed on 6 July 2021).
- Trimble Inc. Trimble Laser Scanning Solutions. Available online: https://geospatial.trimble.com/products-and-solutions/laser-scanning (accessed on 6 July 2021).
- RIEGL Laser Measurement Systems GmbH. RIEGL Terrestrial Laser Scanners. Available online: http://www.riegl.com/nc/products/terrestrial-scanning/ (accessed on 6 July 2021).
- Aniwaa Pte. Ltd. Aniwaa 3D Scanner Comparison Engine. Available online: https://www.aniwaa.com/comparison/3d-scanners (accessed on 6 July 2021).
- AliceVision. Meshroom: A 3D Reconstruction Software. Available online: https://github.com/alicevision/meshroom (accessed on 25 May 2021).
- PhotoModeler Technologies. PhotoModeler Photogrammetry Software. Available online: https://www.photomodeler.com (accessed on 6 July 2021).
- Agisoft LLC. Agisoft Metashape. Available online: https://www.agisoft.com (accessed on 6 July 2021).
- Pix4D SA. PIX4Dmapper. Available online: https://www.pix4d.com/product/pix4dmapper-photogrammetry-software (accessed on 6 July 2021).
- Autodesk Inc. Recap Pro. Available online: https://www.autodesk.com/products/recap (accessed on 6 July 2021).
- 3Dflow SRL. 3DF Zephyr. Available online: https://www.3dflow.net/3df-zephyr-photogrammetry-software (accessed on 6 July 2021).
- OpenDroneMap Authors. ODM—A Command Line Toolkit to Generate Maps, Point Clouds, 3D Models and DEMs from Drone, Balloon or Kite Images. Available online: https://opendronemap.org (accessed on 6 July 2021).
- SimActive Inc. Correlator3D. Available online: https://www.simactive.com/correlator3d-mapping-software-features.html (accessed on 6 July 2021).
- PMS AG. Elcovision 10. Available online: https://en.elcovision.com/ (accessed on 6 July 2021).
- DroneDeploy. DroneDeploy. Available online: https://www.dronedeploy.com (accessed on 6 July 2021).
- Mezhenin, A.; Polyakov, V.; Prishhepa, A.; Izvozchikova, V.; Zykov, A. Using Virtual Scenes for Comparison of Photogrammetry Software. In Advances in Intelligent Systems, Computer Science and Digital Economics II; Hu, Z., Petoukhov, S., He, M., Eds.; Springer International Publishing: Cham, Swizerland, 2021; pp. 57–65. [Google Scholar]
- Kingsland, K. Comparative analysis of digital photogrammetry software for cultural heritage. Digit. Appl. Archaeol. Cult. Herit. 2020, 18, e00157. [Google Scholar] [CrossRef]
- DJI. Phantom 4 RTK. Available online: https://www.dji.com/gr/phantom-4-rtk (accessed on 25 May 2021).
- Trnio, Inc. Trnio 3D Scanner. Available online: https://www.trnio.com/ (accessed on 25 May 2021).
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.H.; Ha, H.; Dong, Y.; Tong, X.; Kim, M.H. Texturefusion: High-quality texture acquisition for real-time rgb-d scanning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1272–1280. [Google Scholar]
- Ha, H.; Lee, J.H.; Meuleman, A.; Kim, M.H. NormalFusion: Real-Time Acquisition of Surface Normals for High-Resolution RGB-D Scanning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 21–24 June 2021; pp. 15970–15979. [Google Scholar]
- Xu, Y.; Zhou, L.; Tang, H.; Wu, Q.; Xie, Q.; Chen, H.; Wang, J. Robust and Accurate RGB-D Reconstruction with Line Feature Constraints. IEEE Robot. Autom. Lett. 2021, 6, 6561–6568. [Google Scholar] [CrossRef]
- ImFusion GmbH. RecFusion Website. Available online: https://www.recfusion.net (accessed on 6 July 2021).
- DotProduct LLC. Dot3D Pro Website. Available online: https://www.dotproduct3d.com/dot3dpro.html (accessed on 6 July 2021).
- Artec Europe. Artec Spider Handheld Scanner. Available online: https://www.artec3d.com/portable-3d-scanners/artec-spider (accessed on 6 July 2021).
- Artec Europe. Artec Leo Handheld Scanner. Available online: https://www.artec3d.com/portable-3d-scanners/artec-leo (accessed on 6 July 2021).
- FARO Technologies. FARO Freestyle 2 Handheld Scanner. Available online: https://www.faro.com/en/Products/Hardware/Freestyle-2-Handheld-Scanner (accessed on 6 July 2021).
- Creaform. Go!SCAN SPARK Handheld Scanner. Available online: https://www.creaform3d.com/en/handheld-portable-3d-scanner-goscan-3d (accessed on 6 July 2021).
- Creaform. HandySCAN 3D Handheld Scanner, SILVER Series. Available online: https://www.creaform3d.com/en/handyscan-3d-silver-series-professional-3d (accessed on 6 July 2021).
- Scantech (Hangzhou) Co. Ltd. KSCAN-Magic Composite 3D Scanner. Available online: https://www.3d-scantech.com/product/kscan-magic-composite-3d-scanner (accessed on 6 July 2021).
- SHINING 3D. EinScan HX, Hybrid Blue Laser & LED Light Source Handheld 3D Scanner. Available online: https://www.einscan.com/handheld-3d-scanner/einscan-hx (accessed on 6 July 2021).
- Cignoni, P.; Corsini, M.; Ranzuglia, G. MeshLab: An Open-Source 3D Mesh Processing System. ERCIM News 2008, 2008, 129–136. [Google Scholar]
- Community, B.O. Blender—A 3D Modelling and Rendering Package; Blender Foundation, Stichting Blender Foundation: Amsterdam, The Netherlands, 2018. [Google Scholar]
- FARO Technologies. FARO SCENE Software Website. Available online: https://www.faro.com/en/Products/Software/SCENE-Software (accessed on 6 July 2021).
- Leica Geosystems AG. Leica Cyclone REGISTER. Available online: https://leica-geosystems.com/products/laser-scanners/software/leica-cyclone/leica-cyclone-register (accessed on 6 July 2021).
- Canon. GPS Receiver GP-E2. Available online: https://www.usa.canon.com/internet/portal/us/home/products/details/cameras/gps-receivers/gps-receiver-gp-e2 (accessed on 6 July 2021).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Min. Distance | Max. Distance | Ranging Error/Accuracy |
|---|---|---|---|
| Artec Ray 3D Scanner [29] | 1 m | 110 m | <0.70 mm at 15 m |
| Faro Focus Series M and Series S [30] | 0.6 m | 70–350 m | ±1 mm (model M70), ±1 mm (rest models) at 10–25 m |
| Leica ScanStation P series [31,32] | 0.4 m | 80–1000+ m * | 1.2 mm |
| Leica RTC360 [33] | 0.5 m | 130 m | 1.0 mm |
| Z + F IMAGER 5010X [34] | 0.3 m | 187.3 m | ±1 mm |
| Teledyne Optech Polaris HD [35] | 1.5 m | 1700 m | 5 mm at 100 m |
| Trimble X7/TX6/TX8 [36] | 0.6 m | 80–340 m * | ≤2 mm * |
| Riegle VZ-Series [37] | 0.5–5 m * | 800–6000m * | 5–15 mm * |
| Model | Type | Maximum Scanning Area | Working Distance | Accuracy |
|---|---|---|---|---|
| Artec Space Spider [60] | SL | 180 × 140 mm | 0.2–0.3 m | 0.05 mm |
| Artec Leo [61] | SL | 838 × 488 mm | 0.35–1.2 m | 0.1 mm |
| Creaform Go!SCAN 20/50 | SL | 143 × 108/380 × 380 mm | n/a, optimal: 380/400 mm | 0.100 mm |
| Creaform Go!SCAN SPARK [63] | SL | 390 × 390 mm | n/a, optimal: 400 mm | 0.05 mm |
| Creaform HandySCAN 307 [64] | L | 225 × 250 mm | n/a, optimal: 300 mm | Up to 0.04 mm |
| Creaform HandySCAN 700 [64] | L | 275 × 250 mm | n/a, optimal: 300 mm | Up to 0.03 mm |
| FARO Freestyle 3DX | L | 2600 × 2900 mm | 0.5–3 m | <1 mm |
| FARO Freestyle 2 [62] | L | 4470 × 5150 mm | 0.5–5 m | 0.5 mm at 1 m, 5 mm at 5 m |
| ScanTech KSCAN-Magic [65] | L | 1440 × 860 mm | n/a, optimal: 300 mm | 0.02 mm |
| Shining 3D EinScan HX [66] | H | 420 × 440 mm (structured-light), 380 × 400 mm (laser) | n/a, optimal: 470 mm | Up to 0.05 mm (structured-light), Up to 0.04 mm (laser) |
| Indoors | Outdoors | |
|---|---|---|
| Building complex | N/A | Drone, Camera |
| Large building | N/A | Drone, Camera |
| Multiple rooms | Terrestrial laser scanner, RGB-D camera, Handheld scanner, Camera | N/A |
| Traffic scene | N/A | Terrestrial laser scanner, Drone, Camera |
| Large room | Terrestrial laser scanner | N/A |
| Room | Terrestrial laser scanner, RGB-D camera, Handheld scanner, Camera | N/A |
| Small room | Terrestrial laser scanner, RGB-D camera, Handheld scanner, Camera | N/A |
| Scene detail | RGB-D camera, Handheld scanner, Camera | Handheld scanner, Camera |
| Object (Dimension) | GT | Faro Focus M70 | FARO Freestyle 3DX | RGB-D | DSLR + Pix4D | iPhone + Trnio |
|---|---|---|---|---|---|---|
| Bomb tools/big screw (length) | 107.16 | n/a | 109.11 | n/a | 107.64 | 106.35 |
| Bomb tools/paper box (top cover length) | 95.32 | 90.01 | 94.48 | 88.39 | 94.36 | 92.55 |
| Victim/lips (length) | 50.55 | 43.42 | 51.58 | 46.60 | 49.23 | 47.69 |
| Victim/shirt button (diameter) | 11.75 | n/a | 11.59 | n/a | 11.67 | 11.16 |
| Tablet (width) | 134.67 | 135.25 | 133.29 | 134.56 | 132.61 | 133.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galanakis, G.; Zabulis, X.; Evdaimon, T.; Fikenscher, S.-E.; Allertseder, S.; Tsikrika, T.; Vrochidis, S. A Study of 3D Digitisation Modalities for Crime Scene Investigation. Forensic Sci. 2021, 1, 56-85. https://doi.org/10.3390/forensicsci1020008
Galanakis G, Zabulis X, Evdaimon T, Fikenscher S-E, Allertseder S, Tsikrika T, Vrochidis S. A Study of 3D Digitisation Modalities for Crime Scene Investigation. Forensic Sciences. 2021; 1(2):56-85. https://doi.org/10.3390/forensicsci1020008
Chicago/Turabian StyleGalanakis, George, Xenophon Zabulis, Theodore Evdaimon, Sven-Eric Fikenscher, Sebastian Allertseder, Theodora Tsikrika, and Stefanos Vrochidis. 2021. "A Study of 3D Digitisation Modalities for Crime Scene Investigation" Forensic Sciences 1, no. 2: 56-85. https://doi.org/10.3390/forensicsci1020008
APA StyleGalanakis, G., Zabulis, X., Evdaimon, T., Fikenscher, S. -E., Allertseder, S., Tsikrika, T., & Vrochidis, S. (2021). A Study of 3D Digitisation Modalities for Crime Scene Investigation. Forensic Sciences, 1(2), 56-85. https://doi.org/10.3390/forensicsci1020008