
A Flexible Particle Model for Rock Fracture: Validation and Assessment of the Influence of Deformability on the Macroscopic Response




Abstract
:1. Introduction
2. Flexible Particle Model
2.1. Main Characterisitics
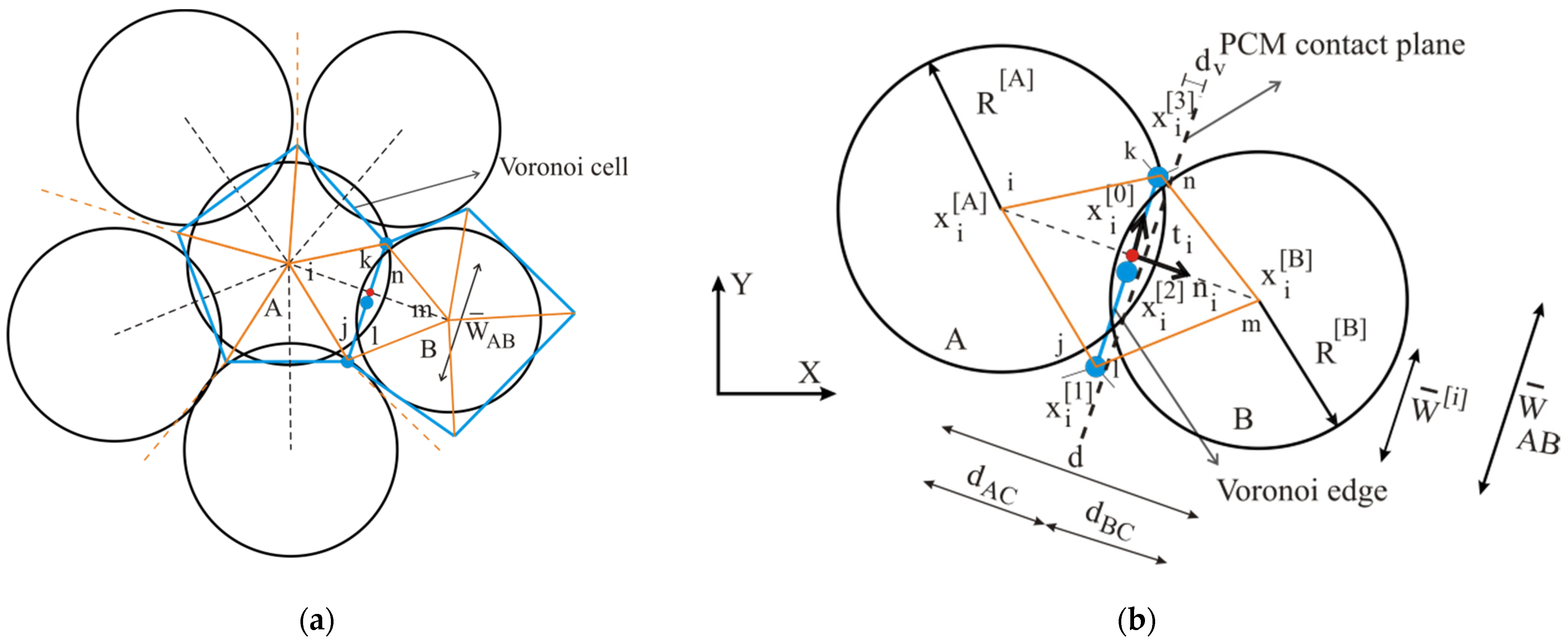
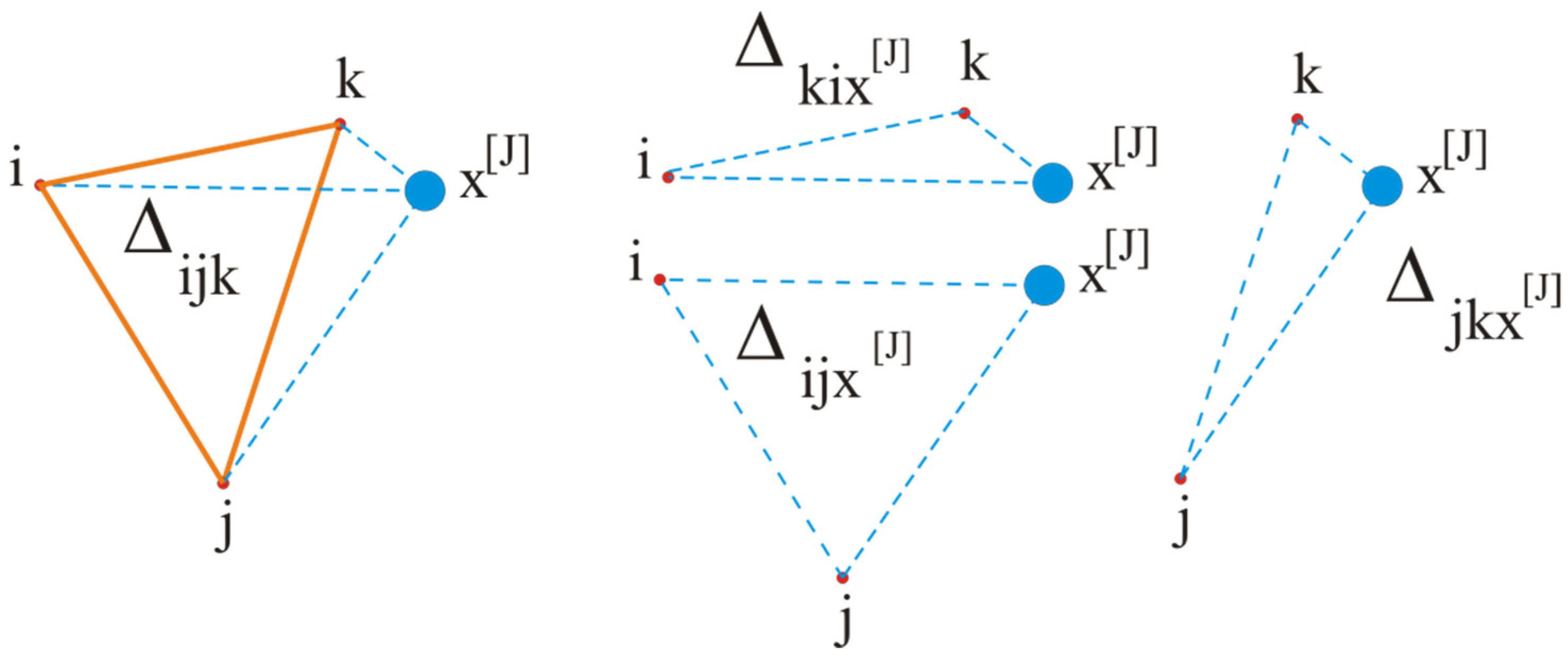
2.2. Fundamentals
2.3. Flexible Contact Model
2.4. Numerical Stability
2.5. Local Contact Stiffness and Local Contact Strength
2.6. Local Contact Constitutive Model
3. Simulation of Rock Specimens
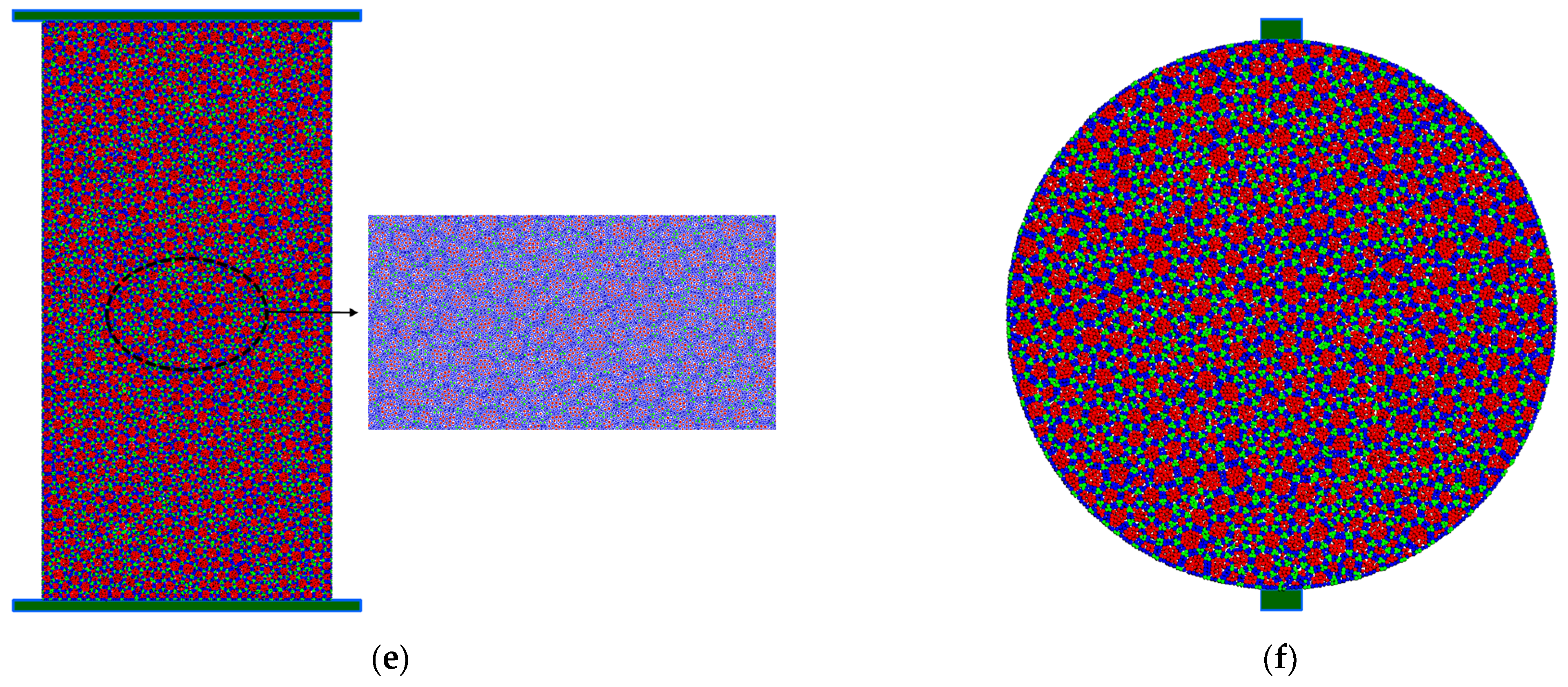
3.1. Model Generation
3.2. Model Parameters
4. Biaxial and Brazilian Tests in a Granite Rock
4.1. Numerical Setup
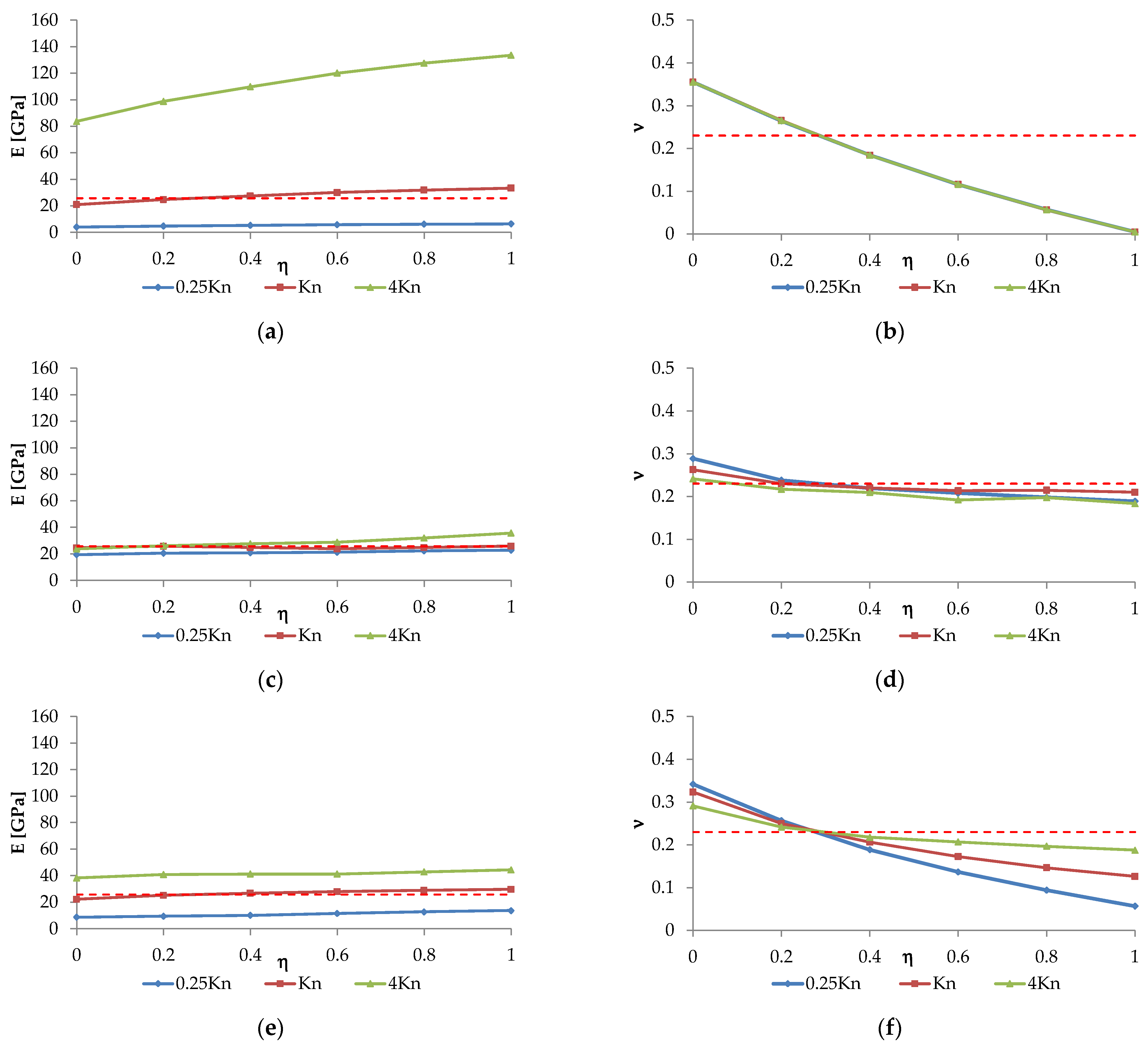
4.2. Elastic Macroscopic Response
4.3. Strength Macroscopic Response
4.3.1. FEM versus DEM Based Deformability
4.3.2. Strength Envelope
4.3.3. Influence of Strength Contact Parameters
4.3.4. Calibrated Response (Bilinear Constitutive Model)
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Potyondy, D.; Cundall, P.; Lee, C. Modelling rock using bonded assemblies of circular particles. In Proceedings of the 2nd North American Rock Mechanics Symposium, Montreal, QC, Canada, 19–21 June 1996; pp. 1937–1944. [Google Scholar]
- Potyondy, D.O.; Cundall, P.A. A bonded-particle model for rock. Int. J. Rock Mech. Min. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Cho, N.; Martin, C.D.; Sego, D. A clumped particle model for rock. Int. J. Rock Mech. Min. 2004, 44, 997–1010. [Google Scholar] [CrossRef]
- Ye, Y.; Thoeni, K.; Zeng, Y.; Buzzi, O.; Giacomini, A. A novel 3D clumped particle method to simulate the complex behaviour of rock. Int. J. Rock Mech. Min. 2019, 120, 1–16. [Google Scholar] [CrossRef]
- Potyondy, D.O. A grain-based model for rock approaching the true microstructure. In Proceedings of the Rock Mechanics in the Nordic Countries, Kingsber, Norway, 9–12 June 2010. [Google Scholar]
- Potyondy, D.O. A flat-jointed bonded-particle material for hard rock. In Proceedings of the 46th US Rock Mechanics/Geomechanics Symposium American Rock Mechanics Association, Chicago, IL, USA, 24–27 June 2012. [Google Scholar]
- Zhou, J.; Lan, H.; Zhang, L.; Yang, D.; Song, J.; Wang, S. Novel grain-based model for simulation of brittle failure of Alxa porphyritic granite. Eng. Geol. 2019, 251, 100–114. [Google Scholar] [CrossRef]
- Wang, Y.; Tonon, F. Modeling Lac du Bonnet granite using a discrete element model. Int. J. Rock Mech. Min. Sci. 2009, 46, 1124–1135. [Google Scholar] [CrossRef]
- Azevedo, N.M.; Lemos, J.V. A 3D generalized rigid particle contact model for rock fracture. Eng. Comput. 2013, 30, 277–300. [Google Scholar] [CrossRef] [Green Version]
- Scholtès, L.; Donzé, F.-V. A DEM model for soft and hard rocks: Role of grain interlocking on strength. J. Mech. Phys. Solids 2013, 61, 352–369. [Google Scholar] [CrossRef]
- Kazerani, T.; Zhao, J. Micromechanical parameters in bonded particle method for modelling of brittle material failure. Int. J. Numer. Anal. Methods Géoméch. 2010, 34, 1877–1895. [Google Scholar] [CrossRef]
- Lan, H.; Martin, C.; Hu, B. Effect of heterogeneity of brittle rock on micromechanical extensile behaviour during compression loading. J. Geophys. Res. 2010, 115, 1–14. [Google Scholar] [CrossRef]
- Itasca UDEC. Distinct-Element Modeling of JOINTED and Blocky Material in 2D, version 7.0; Itasca Consulting Group Inc.: Minneapolis, MN, USA, 2018. [Google Scholar]
- Azevedo, N.M.; Candeias, M.; Gouveia, F. A Rigid Particle Model for Rock Fracture Following the Voronoi Tessellation of the Grain Structure: Formulation and Validation. Rock Mech. Rock Eng. 2015, 48, 535–557. [Google Scholar] [CrossRef]
- Kazerani, T.; Zhao, J. A Microstructure-Based Model to Characterize Micromechanical Parameters Controlling Compressive and Tensile Failure in Crystallized Rock. Rock Mech. Rock Eng. 2014, 47, 435–452. [Google Scholar] [CrossRef]
- Gao, F.; Stead, D. The application of a modified Voronoi logic to brittle fracture modelling at the laboratory and field scale. Int. J. Rock Mech. Min. 2014, 68, 1–14. [Google Scholar] [CrossRef]
- Ghazvinian, E.; Diederichs, M.; Quey, R. 3D random Voronoi grain-based models for simulation of brittle rock damage and fabric-guided micro-fracturing. J. Rock Mech. Geotech. Eng. 2014, 6, 506–521. [Google Scholar] [CrossRef] [Green Version]
- Li, X.F.; Li, H.B.; Zhao, J. 3D polycrystalline discrete element method (3PDEM) for simulation of crack initiation and propagation in granular rock. Comput. Geotech. 2017, 90, 96–112. [Google Scholar] [CrossRef]
- Zhou, W.; Ji, X.; Ma, G.; Chen, Y. FDEM Simulation of Rocks with Microstructure Generated by Voronoi Grain-Based Model with Particle Growth. Rock Mech. Rock Eng. 2020, 53, 1909–1921. [Google Scholar] [CrossRef]
- Tang, P.; Chen, G.-Q.; Huang, R.-Q.; Wang, D. Effect of the number of coplanar rock bridges on the shear strength and stability of slopes with the same discontinuity persistence. Bull. Eng. Geol. Environ. 2021, 80, 3675–3691. [Google Scholar] [CrossRef]
- Le, H.-K.; Huang, W.-C.; Chien, C.-C. Exploring micromechanical behaviors of soft rock joints through physical and DEM modeling. Bull. Eng. Geol. Environ. 2021, 80, 2433–2446. [Google Scholar] [CrossRef]
- Underwood, P. Dynamic relaxation. In Computation Methods for Transient Analysis; Belytschko, T., Hughes, T., Eds.; Elsevier Science Publishers B.V.: Oxford, UK, 1983; pp. 245–265. [Google Scholar]
- Cundall, P. Distinct element models for rock and soil structure. In Analytical and Computational Methods in Engineering Rock Mechanics; Brown, E.T., Ed.; Allen & Unwin: London, UK, 1987; Chapter 4; pp. 129–163. [Google Scholar]
- Lemos, J.V.; Cundall, P. Earthquake analysis of concrete gravity dams on jointed rock foundations. In Distinct Element Modelling in Geomechanics; A.A. Balkema: Rotterdam, The Netherlands, 1999; pp. 117–143. [Google Scholar]
- Belytschko, T.; Yeh, I.S. The splitting pinball method for contact-impact problems. Comput. Method Appl. Mech. Eng. 1993, 105, 375–393. [Google Scholar] [CrossRef]
- Okabe, A.; Boots, B.; Sugihara, K. Spatial Tessellations: Concepts and Applications of Voronoi Diagrams; John Wiley & Sons: Hoboken, NJ, USA, 1992. [Google Scholar]
- Klanphumeesri, S. Direct Tension Tests of Rock Specimens. Master’s Thesis, Suranaree University of Technology, Nakhon Ratchasima, Thailand, 2010. [Google Scholar]
- Erarslan, N.; Williams, D. Experimental, numerical and analytical studies on tensile strength of rocks. Int. J. Rock Mech. Min. 2012, 49, 21–30. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Contact | ||
|---|---|---|
| Rigid PM [14] | 1.08 × 104 | 0.28 |
| Flexible PM FEM (E = 25.8) | 18.00 × 104 | 0.28 |
| Flexible PM DEM-inner contacts (E = 25.8) | 4.90 × 104 | 0.30 |
| Flexible PM FEM (E = 51.6) | 2.06 × 104 | 0.28 |
| Type of Contact | |||||
|---|---|---|---|---|---|
| Brittle | 13.70 | 48.80 | 0.40 | (-) | (-) |
| Bilinear | 11.5 | 33.25 | 0.5 | 66.1 | 2078.6 |
| Model | Uniaxial Compression | Brazilian Test |
|---|---|---|
| Rigid PM [14] | 1.14 | 0.75 |
| Proposed Flexible PM (FEM) | 9.29 | 3.59 |
| Flexible PM (DEM-inner contacts) | 28.15 | 4.34 |
| Case | |||||
|---|---|---|---|---|---|
| Gf1 | 11.5 | 11.5 | 0.5 | 66.1 | 2082.2 |
| 23.0 | |||||
| 34.5 | |||||
| 46.0 | |||||
| Gf2 | 11.5 | 33.1 | 1042.7 | ||
| 23.0 | |||||
| 34.5 | |||||
| 46.0 | |||||
| Gf3 | 11.5 | 16.5 | 519.8 | ||
| 23.0 | |||||
| 34.5 | |||||
| 46.0 |
| Case | |||||
|---|---|---|---|---|---|
| τ/σn.t=1 | 11.5 | 11.5 | 0.2 | 33.1 | 1042.7 |
| 0.5 | |||||
| 0.8 | |||||
| τ/σn.t=3 | 11.5 | 34.5 | 0.2 | ||
| 0.5 | |||||
| 0.8 |
| Type of Contact | |||||
|---|---|---|---|---|---|
| Bilinear | 8.5 | 29.75 | 0.40 | 20.0 | 800.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azevedo, N.M.; Farinha, M.L.B.; Oliveira, S. A Flexible Particle Model for Rock Fracture: Validation and Assessment of the Influence of Deformability on the Macroscopic Response. Geotechnics 2022, 2, 523-548. https://doi.org/10.3390/geotechnics2030026
Azevedo NM, Farinha MLB, Oliveira S. A Flexible Particle Model for Rock Fracture: Validation and Assessment of the Influence of Deformability on the Macroscopic Response. Geotechnics. 2022; 2(3):523-548. https://doi.org/10.3390/geotechnics2030026
Chicago/Turabian StyleAzevedo, Nuno Monteiro, Maria Luísa Braga Farinha, and Sérgio Oliveira. 2022. "A Flexible Particle Model for Rock Fracture: Validation and Assessment of the Influence of Deformability on the Macroscopic Response" Geotechnics 2, no. 3: 523-548. https://doi.org/10.3390/geotechnics2030026
APA StyleAzevedo, N. M., Farinha, M. L. B., & Oliveira, S. (2022). A Flexible Particle Model for Rock Fracture: Validation and Assessment of the Influence of Deformability on the Macroscopic Response. Geotechnics, 2(3), 523-548. https://doi.org/10.3390/geotechnics2030026