
Review of Fiber- or Yarn-Based Wearable Resistive Strain Sensors: Structural Design, Fabrication Technologies and Applications



Abstract
:1. Introduction
2. Conductive Materials
2.1. Conducting Polymer
2.2. Carbon-Based Materials
2.3. Metal-Based Materials
2.4. MXene
3. Fabrication and Structure Design
3.1. Conductive Composite Fibers
3.1.1. Uniform Mixing of Conductive Materials
3.1.2. Selective Localization of Conductive Materials

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Substrate | Sensitive Materials | Breaking Stress and Strain | Conductivity | Strain Range | GF | Repeatability | Linearity | Response Time | Ref. |
|---|---|---|---|---|---|---|---|---|---|---|
| Monofilament | SBS | Gr | 10.16 MPa; 910.83% | N/A | 100% | 10,083.98 (73–100%) | 2500 (20%) | N/A | N/A | [70] |
| Monofilament | TPU | MWCNTs | 28 MPa; 320% | N/A | 100% | 2800 (5–100%) | N/A | N/A | N/A | [71] |
| Monofilament | SIBS | P3HT | 11.4 MPa; 975% | 0.38 S/cm | 770% | 20 (12.25%) | N/A | N/A | N/A | [86] |
| Monofilament | TPU | MWCNTs/ AgNWs | 32.49 MPa | 0.803 S/cm | 250% | 13 (50–150%) | N/A | N/A | N/A | [73] |
| Ribbon and coaxial | TPE | SWCNTs | N/A | N/A | 100% | 425 (100%) | 3250 (20–100%) | R2 = 0.98 (20–100%) | N/A | [38] |
| Core–sheath | Ecoflex | CNTs | N/A | N/A | 330% | 1378 (330%) | >10,000 (100%) | N/A | >300 ms (100%) | [74] |
| Porous | TPU | CB | 2.15 MPa | N/A | 380% | 28,084 (204%) | 11,000 (60%) | N/A | 200 ms | [87] |
| Coaxial | PU | MXene | 20.3 GPa | N/A | 152% | 238 (50%) | 1000 (50%) | N/A | N/A | [75] |
| Hollow | TPU | CNTs | 2.92 MPa; 476% | N/A | >350% | 1344.1 (200%) | 10,000 (100%) | N/A | 167 ms | [76] |
3.2. Conductive Coated Fibers
3.2.1. Microcrack Structure
3.2.2. Wrinkle Structure
3.2.3. Multilayer Structure
| Method | Structure | Substrate | Adhesive | Sensitive Materials | Breaking Stress and Strain | Conductivity | Strain Range | GF | Repeatability | Linearity | Response Time | Ref. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| In site reduction | Multifilament | PU | N/A | AgNPs | N/A | 0.16 Ω/cm | 200% | 659 (150–200%) | 10,000 (10%) | N/A | N/A | [45] |
| In situ polymerization | Multifilament | PS | N/A | PEDOT | 0.813 ± 0.057 GPa | 600 Ω/cm | 70% | 0.244 (70%) | 1000 (20%) | N/A | N/A | [36] |
| deposition | Beaded | PDMS | N/A | Au/CNTs | N/A | N/A | 125% | low | 5000 (30%) | R2 = 0.96 | N/A | [88] |
| Spraying | Double sheath buckle | SBS | SGE | NTS | N/A | N/A | 600% | 0.14 (200–600%) | 5000 (100%) | N/A | 80 ms | [89] |
| Dip coating | Wrinkle assisted | PU | N/A | CNTs | N/A | N/A | 200% | 1344.1 (200%) | 10,000 (30%) | R2 = 0.99 (0–50%) | <88 ms (1%) | [90] |
| Roller transfer | Core–sheath | PU | PU | AgNWs | 38.24 MPa; 980% | 240.36 S/cm | 60% | 5~9557 | 10,000 (10%) | N/A | 120 ms (0.5%) | [91] |
| In situ polymerization and reduction | Core–sheath | PF | PDA | AgNPs | 300 cN; 405.9% | 4.5 Ω/cm | N/A | N/A | N/A | nonlinear error < 29.3% | N/A | [92] |
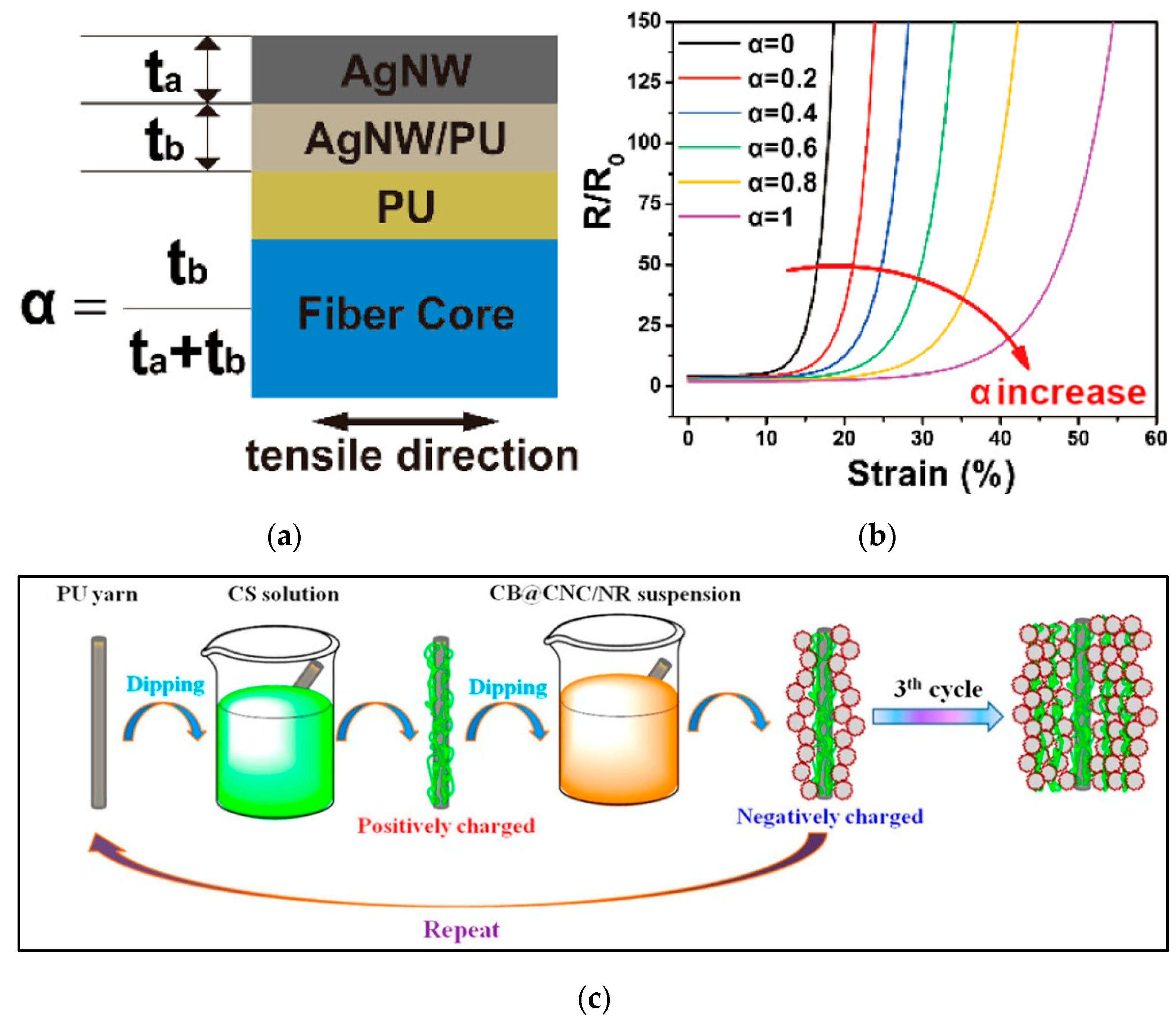
| LBL | Core–sheath | PU | CS | CB/CNC/NR | N/A | 4.1 MΩ/cm | 1% | 38.9 (1%) | 10,000 (1%) | Good linearity | N/A | [34] |
| LBL and sputtering | Core–sheath | PU | PVA | GNSs/Au/GNSs | N/A | N/A | 75% | 661.59 (50%) | 10,000 (50%) | R2 = 0.983 (0–50%) | N/A | [42] |
3.3. Conductive Composite Yarns
3.3.1. Wrapped Structure
3.3.2. Braided Structure
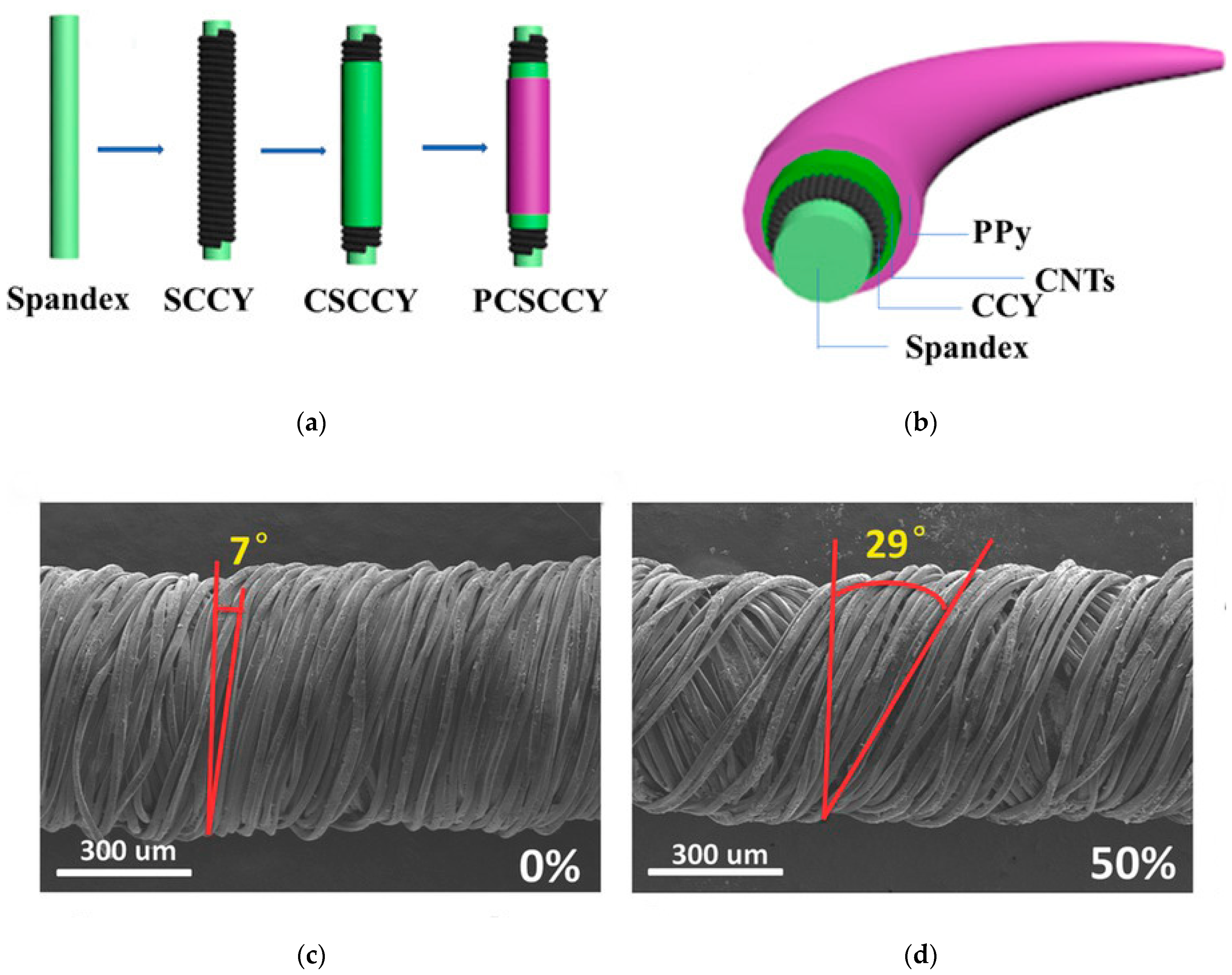
3.3.3. Helical and Winding Structure
| Method | Structure | Substrate | Sensitive Materials | Breaking Stress and Strain | Conductivity | Strain Range | GF | Repeatability | Linearity | Response Time | Ref. |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Dip coating and in situ polymerization | Core-spun yarn | PU/cotton | CNT/PPy | >7 N; >300% | 310 Ω/cm | 350 | 5.11 (0–50%); 3.41 (50–100%) | N/A | Linearity at 0–50% and 50–350% strain, respectively | N/A | [95] |
| Dip coating | Wrapped yarn | PU/PE | Gr | 29.14 MPa; 676% | 0.012 S/m | 0.2–100% | 3.7 (50%) | 10,000 (30% and 50%) | N/A | <100 ms | [96] |
| ELD | Wrapped yarn | PU | Cu | N/A | 0.2 Ω/cm | 50% | N/A | 5000 (50%) | Good linearity | N/A | [46] |
| Dip coating | Braided yarn | PU/PET | AgNWs | N/A | 0.5 Ω/cm | 108.92% | 767.50 (97.28–108.92%) | 4000 (30%) | R2 = 0.975 (97.28–108.92%) | <100 ms (0.5%) | [97] |
| Coating | Braided yarn | Rubber/PET | AgNWs | N/A | 3 Ω/cm | 100% | 11.4 (100%) | 1700 (30%) | N/A | N/A | [98] |
| Dip coating | Braided yarn | Rubber/PET | CNT | 44N; 350% | 0.12 kΩ/cm | 44% | 980 (29–44%) | 1000 (20%) | N/A | 200 ms | [35] |
| Spraying | Helical coil | PU | CNT | 50.2 MPa; 1700% | N/A | 900% | N/A | 100 (200%) | N/A | N/A | [99] |
| Spraying | Helical layer | TPU | SWCNT/RGO | 40.0 MPa; 1237% | 821.8 S/m | 620% | 2160.4 (550–620%) | 1000 (50%) | N/A | N/A | [100] |
4. Interconnection and Packaging
5. Application
5.1. Human Motion Monitoring
5.2. Human–Computer Interaction
6. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Y.T.; Yan, T.; Pan, Z.J. Wearable carbon-based resistive sensors for strain detection: A review. IEEE Sens. J. 2020, 21, 4030–4041. [Google Scholar] [CrossRef]
- Zheng, M.Y.; Li, W.Y.; Xu, M.J.; Xu, N.; Chen, P.; Han, M.; Xie, B. Strain sensors based on chromium nanoparticle arrays. Nanoscale 2014, 6, 3930–3933. [Google Scholar] [CrossRef]
- Barlian, A.A.; Park, W.T.; Mallon, J.R.; Rastegar, A.J.; Pruitt, B.L. Review: Semiconductor piezoresistance for microsystems. Proc IEEE Inst. Electr. Electron Eng. 2009, 97, 513–552. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Ouyang, Z.; Wang, F.; Liu, Y. A review on graphene strain sensors based on fiber assemblies. SN Appl. Sci. 2020, 2, 862. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Facchetti, A. Mechanically flexible conductors for stretchable and wearable E-skin and E-textile devices. Adv. Mater. 2019, 31, 1901408. [Google Scholar] [CrossRef]
- Lee, J.; Zambrano, B.L.; Woo, J.; Yoon, K.; Lee, T. Recent advances in 1D stretchable electrodes and devices for textile and wearable electronics: Materials, fabrications, and applications. Adv. Mater. 2020, 32, 1902532. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Y.N.; Huang, Y.; Hu, W.; Guo, X.H.; Wang, Y.; Liu, P.; Liu, C.X.; Zhang, Y.G. Highly sensitive flexible strain sensor based on threadlike spandex substrate coating with conductive nanocomposites for wearable electronic skin. Smart Mater. Struct. 2019, 28, 035004. [Google Scholar] [CrossRef]
- Quan, Y.N.; Hu, J.Y.; Yang, X.D.; Lu, Z. Preparation and characterization of resistive strain sensor based on braided skin-core rope. J. Donghua Univ. 2019, 36, 458–465. [Google Scholar]
- Dong, X.L.; Wang, T.T.; Hu, J.Y.; Dong, H.Q.; Lu, Z.; Yang, X.D. Effect of dip coating process on the performance of graphene/spandex yarn strain sensor. J. Donghua Univ. 2019, 36, 451–457. [Google Scholar]
- Wang, X.; Sparkman, J.; Gou, J.H. Strain sensing of printed carbon nanotube sensors on polyurethane substrate with spray deposition modeling. Compos. Commun. 2017, 3, 1–6. [Google Scholar] [CrossRef]
- Yu, Y.; Luo, Y.F.; Guo, A.; Yan, L.J.; Wu, Y.; Jiang, K.L.; Li, Q.Q.; Fan, S.S.; Wang, J.P. Flexible and transparent strain sensors based on super-aligned carbon nanotube films. Nanoscale 2017, 9, 6716–6723. [Google Scholar] [CrossRef] [PubMed]
- Amjadi, M.; Turan, M.; Clementson, C.P.; Sitti, M. Parallel microcracks-based ultrasensitive and highly stretchable strain sensors. ACS Appl. Mater. Interfaces 2016, 8, 5618–5626. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.L.; Hao, J.; Huang, Z.Q.; Zheng, G.Q.; Dai, K.; Liu, C.T.; Shen, C.Y. Flexible electrically resistive-type strain sensors based on reduced graphene oxide-decorated electrospun polymer fibrous mats for human motion monitoring. Carbon 2018, 126, 360–371. [Google Scholar] [CrossRef]
- Lin, L.; Wang, L.; Li, B.; Luo, J.; Huang, X.; Gao, Q.; Xue, H.; Gao, J. Dual conductive network enabled superhydrophobic and high performance strain sensors with outstanding electro-thermal performance and extremely high gauge factors. Chem. Eng. J. 2020, 385, 123391. [Google Scholar] [CrossRef]
- Seyedin, S.; Zhang, P.; Naebe, M.; Qin, S.; Chen, J.; Wang, X.A.; Razal, J.M. Textile strain sensors: A review of the fabrication technologies, performance evaluation and applications. Mater. Horiz. 2019, 6, 219–249. [Google Scholar] [CrossRef]
- Luo, J.C.; Gao, S.J.; Luo, H.; Wang, L.; Huang, X.W.; Guo, Z.; Lai, X.J.; Lin, L.W.; Li, R.K.Y.; Gao, J.F. Superhydrophobic and breathable smart MXene-based textile for multifunctional wearable sensing electronics. Chem. Eng. J. 2021, 406, 126898. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, S.; Shi, J.; Zhang, H.; Zhu, F.; Yang, X. Determinants of electrical resistance change of in situ PPy-polymerized stretch plain woven fabric under uniaxial tensile strain. J. Text. Inst. 2017, 108, 1545–1551. [Google Scholar] [CrossRef]
- Jiyong, H.; Xiaofeng, Z.; Guohao, L.; Xudong, Y.; Xin, D. Electrical properties of PPy-coated conductive fabrics for human joint motion monitoring. Nephron Clin. Pract. 2016, 16, 7–12. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhang, M.; Yang, B.; Tan, J.; Ding, X. Highly compressible, thermally stable, light-weight, and robust aramid nanofibers/Ti3AlC2 MXene composite aerogel for sensitive pressure sensor. ACS Nano 2020, 14, 10633–10647. [Google Scholar] [CrossRef]
- Bi, L.; Yang, Z.; Chen, L.; Wu, Z.; Ye, C. Compressible AgNWs/Ti3C2Tx MXene aerogel-based highly sensitive piezoresistive pressure sensor as versatile electronic skins. J. Mater. Chem. A 2020, 8, 20030–20036. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, J.; Chen, S.; Varley, R.J.; Pan, K. 1D/2D nanomaterials synergistic, compressible, and response rapidly 3D graphene aerogel for piezoresistive sensor. Adv. Funct. Mater. 2020, 30, 2003618. [Google Scholar] [CrossRef]
- Wei, X.D.; Cao, X.H.; Wang, Y.L.; Zheng, G.Q.; Dai, K.; Liu, C.T.; Shen, C.Y. Conductive herringbone structure carbon nanotube/thermoplastic polyurethane porous foam tuned by epoxy for high performance flexible piezoresistive sensor. Compos. Sci. Technol. 2017, 149, 166–177. [Google Scholar] [CrossRef]
- Li, Q.; Li, J.; Tran, D.Q.; Luo, C.Q.; Gao, Y.; Yu, C.J.; Xuan, F.Z. Engineering of carbon nanotube/polydimethylsiloxane nanocomposites with enhanced sensitivity for wearable motion sensors. J. Mater. Chem. C 2017, 5, 11092–11099. [Google Scholar] [CrossRef]
- Geng, W.H.Y.; Cuthbert, T.J.; Menon, C. Conductive thermoplastic elastomer composite capacitive strain sensors and their application in a wearable device for quantitative joint angle prediction. ACS Appl. Polym. 2021, 3, 122–129. [Google Scholar] [CrossRef]
- Choi, C.; Lee, J.M.; Kim, S.H.; Kim, S.J.; Di, J.T.; Baughman, R.H. Twistable and stretchable sandwich structured fiber for wearable sensors and supercapacitors. Nano Lett. 2016, 16, 7677–7684. [Google Scholar] [CrossRef] [PubMed]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch fabrication of customizable silicone-textile composite capacitive strain sensors for human motion tracking. Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar] [CrossRef] [Green Version]
- Cooper, C.B.; Arutselvan, K.; Liu, Y.; Armstrong, D.; Lin, Y.L.; Khan, M.R.; Genzer, J.; Dickey, M.D. Stretchable capacitive sensors of torsion, strain, and touch using double helix liquid metal fibers. Adv. Funct. Mater. 2017, 27, 1605630. [Google Scholar] [CrossRef]
- Chen, H. Application of precipitate free zone growth kinetics to the beta-phase depletion behavior in a CoNiCrAlY coating alloy: An analytical approach. Metall. Mater Trans. A 2018, 49A, 2551–2560. [Google Scholar] [CrossRef]
- Persano, L.; Dagdeviren, C.; Su, Y.W.; Zhang, Y.H.; Girardo, S.; Pisignano, D.; Huang, Y.G.; Rogers, J.A. High performance piezoelectric devices based on aligned arrays of nanofibers of poly(vinylidenefluoride-co-trifluoroethylene). Nat. Commun. 2013, 4, 1633. [Google Scholar] [CrossRef]
- Wu, R.; Ma, L.; Liu, S.; Patil, A.B.; Hou, C.; Zhang, Y.; Zhang, W.; Yu, R.; Yu, W.; Guo, W.; et al. Fibrous inductance strain sensors for passive inductance textile sensing. Mater. Today Phys. 2020, 15, 100243. [Google Scholar] [CrossRef]
- Xing, Z.G.; Lin, J.; McCoul, D.; Zhang, D.P.; Zhao, J.W. Inductive strain sensor with high repeatability and ultra-low hysteresis based on mechanical spring. IEEE Sens. J. 2020, 20, 14670–14675. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, G.; Yang, W.Q.; Jing, Q.S.; Bai, P.; Yang, Y.; Hou, T.C.; Wang, Z.L. Harmonic-resonator-based triboelectric nanogenerator as a sustainable power source and a self-powered active vibration sensor. Adv. Mater. 2013, 25, 6094–6099. [Google Scholar] [CrossRef]
- Hsieh, H.H.; Hsu, F.C.; Chen, Y.F. Energetically autonomous, wearable, and multifunctional sensor. ACS Sens. 2018, 3, 113–120. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, X.; Han, Y.; Zhang, X.; Lu, C. Highly sensitive, stretchable, and wash-durable strain sensor based on ultrathin conductive layer@polyurethane yarn for tiny motion monitoring. ACS Appl. Mater. Interfaces 2016, 8, 9936–9945. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.J.; Hao, B.W.; Song, W.F.; Chen, S.X.; Li, D.Q.; Luo, L.; Xia, Z.G.; Cheng, D.S.; Xu, A.C.; Cai, G.M.; et al. Highly sensitive and durable wearable strain sensors from a core-sheath nanocomposite yarn. Compos. B Eng. 2020, 183, 107683. [Google Scholar] [CrossRef]
- Eom, J.; Jaisutti, R.; Lee, H.; Lee, W.; Heo, J.S.; Lee, J.Y.; Park, S.K.; Kim, Y.H. Highly sensitive textile strain sensors and wireless user-interface devices using all-polymeric conducting fibers. ACS Appl. Mater. Interfaces 2017, 9, 10190–10197. [Google Scholar] [CrossRef]
- Yue, X.; Jia, Y.; Wang, X.; Zhou, K.; Zhai, W.; Zheng, G.; Dai, K.; Mi, L.; Liu, C.; Shen, C. Highly stretchable and durable fiber-shaped strain sensor with porous core-sheath structure for human motion monitoring. Compos. Sci. Technol. 2020, 189, 108038. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, X.Z.; Xin, Y.Y.; Lubineau, G. Coaxial thermoplastic elastomer-wrapped carbon nanotube fibers for deformable and wearable strain sensors. Adv. Funct. Mater. 2018, 28, 1705591. [Google Scholar] [CrossRef]
- Wang, X.; Sun, H.; Yue, X.; Yu, Y.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. A highly stretchable carbon nanotubes/thermoplastic polyurethane fiber-shaped strain sensor with porous structure for human motion monitoring. Compos. Sci. Technol. 2018, 168, 126–132. [Google Scholar] [CrossRef]
- Li, Y.H.; Zhou, B.; Zheng, G.Q.; Liu, X.H.; Li, T.X.; Yan, C.; Cheng, C.B.; Dai, K.; Liu, C.T.; Shen, C.Y.; et al. Continuously prepared highly conductive and stretchable SWNT/MWNT synergistically composited electrospun thermoplastic polyurethane yarns for wearable sensing. J. Mater. Chem. C 2018, 6, 2258–2269. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, C.; Wang, Q.; Jian, M.; Zhang, Y. Sheath-core graphite/silk fiber made by dry-meyer-rod-coating for wearable strain sensors. ACS Appl. Mater. Interfaces 2016, 8, 20894–20899. [Google Scholar] [CrossRef]
- Li, X.T.; Koh, K.H.; Farhan, M.; Lai, K.W.C. An ultraflexible polyurethane yarn-based wearable strain sensor with a polydimethylsiloxane infiltrated multilayer sheath for smart textiles. Nanoscale 2020, 12, 4110–4118. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Jiang, J.W.; Yoon, S.; Kim, K.S.; Kim, J.H.; Park, S.; Kim, S.H.; Piao, L.H. High-performance stretchable conductive composite fibers from surface-modified silver nanowires and thermoplastic polyurethane by wet spinning. ACS Appl. Mater. Interfaces 2018, 10, 2093–2104. [Google Scholar] [CrossRef] [PubMed]
- Ma, R.; Kang, B.; Cho, S.; Choi, M.; Baik, S. Extraordinarily high conductivity of stretchable fibers of polyurethane and silver nanoflowers. ACS Nano 2015, 9, 10876–10886. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Shin, S.; Lee, S.; Song, J.; Kang, S.; Han, H.; Kim, S.; Kim, S.; Seo, J.; Kim, D.; et al. Highly sensitive multifilament fiber strain sensors with ultrabroad sensing range for textile electronics. ACS Nano 2018, 12, 4259–4268. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Li, R.; Chen, X.; Chalmers, E.; Liu, X.; Wang, Y.; Xu, B.B.; Liu, X. Ultraelastic yarns from curcumin-assisted ELD toward wearable human-machine interface textiles. Adv. Sci. 2020, 7, 2002009. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.F.; Han, F.; Li, J.H.; Meng, X.Y.; Huang, W.P.; Cao, D.X.; Zhang, G.P.; Sun, R.; Wong, C.P. Advancements in copper nanowires: Synthesis, purification, assemblies, surface modification, and applications. Small 2018, 14, 1800047. [Google Scholar] [CrossRef]
- Zhu, S.; So, J.H.; Mays, R.; Desai, S.; Barnes, W.R.; Pourdeyhimi, B.; Dickey, M.D. Ultrastretchable fibers with metallic conductivity using a liquid metal alloy core. Adv. Funct. Mater. 2013, 23, 2308–2314. [Google Scholar] [CrossRef]
- Ahmed, A.; Hossain, M.M.; Adak, B.; Mukhopadhyay, S. Recent advances in 2D MXene integrated smart-textile interfaces for multifunctional applications. Chem. Mat. 2020, 32, 10296–10320. [Google Scholar] [CrossRef]
- Huang, Y.; Ellingford, C.; Bowen, C.; McNally, T.; Wu, D.; Wan, C. Tailoring the electrical and thermal conductivity of multi-component and multi-phase polymer composites. Int. Mater. Rev. 2019, 65, 129–163. [Google Scholar] [CrossRef]
- Tseghai, G.B.; Mengistie, D.A.; Malengier, B.; Fante, K.A.; Van Langenhove, L. PEDOT:PSS-based conductive textiles and their applications. Sensors 2020, 20, 1881. [Google Scholar] [CrossRef] [Green Version]
- Qi, G.J.; Huang, L.Y.; Wang, H.L. Highly conductive free standing polypyrrole films prepared by freezing interfacial polymerization. Chem. Commun. 2012, 48, 8246–8248. [Google Scholar] [CrossRef] [PubMed]
- Worfolk, B.J.; Andrews, S.C.; Park, S.; Reinspach, J.; Liu, N.; Toney, M.F.; Mannsfeld, S.C.B.; Bao, Z.N. Ultrahigh electrical conductivity in solution-sheared polymeric transparent films. Proc. Natl. Acad. Sci. USA 2015, 112, 14138–14143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.K.; Li, M.J.; Zong, L.; Wu, X.C.; You, J.; Du, P.K.; Li, C.X. Liquid metal droplets wrapped with polysaccharide microgel as biocompatible aqueous ink for flexible conductive devices. Adv. Funct. Mater. 2018, 28, 1804197. [Google Scholar] [CrossRef]
- Pan, Z.Y.; Ma, J.Z.; Zhang, W.B.; Wei, L.F. Flexible conductive polymer composites in strain sensors. Prog. Chem. 2020, 32, 1592–1607. [Google Scholar]
- Seyedin, M.Z.; Razal, J.M.; Innis, P.C.; Wallace, G.G. Strain-responsive polyurethane/PEDOT:PSS elastomeric composite fibers with high electrical conductivity. Adv. Funct. Mater. 2014, 24, 2957–2966. [Google Scholar] [CrossRef] [Green Version]
- Meer, S.; Kausar, A.; Iqbal, T. Trends in conducting polymer and hybrids of conducting polymer/carbon nanotube: A review. Polym. Plast. Technol. Eng. 2016, 55, 1416–1440. [Google Scholar] [CrossRef]
- Li, L.; Shi, P.; Hua, L.; An, J.; Gong, Y.; Chen, R.; Yu, C.; Hua, W.; Xiu, F.; Zhou, J.; et al. Design of a wearable and shape-memory fibriform sensor for the detection of multimodal deformation. Nanoscale 2017, 10, 118–123. [Google Scholar] [CrossRef]
- Wu, H.; Liu, Q.; Chen, H.; Shi, G.; Li, C. Fibrous strain sensor with ultra-sensitivity, wide sensing range, and large linearity for full-range detection of human motion. Nanoscale 2018, 10, 17512–17519. [Google Scholar] [CrossRef]
- Seyedin, S.; Razal, J.M.; Innis, P.C.; Wallace, G.G. A facile approach to spinning multifunctional conductive elastomer fibres with nanocarbon fillers. Smart Mater. Struct. 2016, 25, 035015. [Google Scholar] [CrossRef]
- Zhang, R.; Pan, P.; Dai, Q.; Yang, X.; Yang, Z.; Wei, J.; Liu, J.; Yuan, Q. Sensitive and wearable carbon nanotubes/carbon black strain sensors with wide linear ranges for human motion monitoring. J. Mater. Sci. Mater. Electron. 2018, 29, 5589–5596. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Liu, Q.; Chen, P. Flexible strain sensor based on carbon black/silver nanoparticles composite for human motion detection. Materials 2018, 11, 1836. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Li, Y.; Dai, K.; Liu, M.; Zhou, K.; Zheng, G.; Liu, C.; Shen, C. Conductive thermoplastic polyurethane composites with tunable piezoresistivity by modulating the filler dimensionality for flexible strain sensors. Compos. Part A Appl. Sci. Manuf. 2017, 101, 41–49. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Li, Y.L.; Li, Z.Y.; Wang, Y.L.; Dai, K.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y. The effect of filler dimensionality on the electromechanical performance of polydimethylsiloxane based conductive nanocomposites for flexible strain sensors. Compos. Sci. Technol. 2017, 139, 64–73. [Google Scholar] [CrossRef]
- Heo, J.S.; Hossain, M.F.; Kim, I. Challenges in design and fabrication of flexible/stretchable carbon- and textile-based wearable sensors for health monitoring: A critical review. Sensors 2020, 20, 3927. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Wang, Z.; Pan, Z.-J. Flexible strain sensors fabricated using carbon-based nanomaterials: A review. Curr. Opin. Solid State Mater. Sci. 2018, 22, 213–228. [Google Scholar] [CrossRef]
- Ojstrsek, A.; Plohl, O.; Gorgieva, S.; Kurecic, M.; Jancic, U.; Hribernik, S.; Fakin, D. Metallisation of textiles and protection of conductive layers: An overview of application techniques. Sensors 2021, 21, 3508. [Google Scholar] [CrossRef]
- Qin, R.; Shan, G.; Hu, M.; Huang, W. Two-dimensional transition metal carbides and/or nitrides (MXenes) and their applications in sensors. Mater. Today Phys. 2021, 21, 100527. [Google Scholar] [CrossRef]
- Gong, M.; Yue, L.C.; Kong, J.Y.; Lin, X.; Zhang, L.; Wang, J.P.; Wang, D.R. Knittable and sewable spandex yarn with nacre-mimetic composite coating for wearable health monitoring and thermo- and antibacterial therapies. ACS Appl. Mater. Interfaces 2021, 13, 9053–9063. [Google Scholar] [CrossRef]
- Li, W.Y.; Zhou, Y.F.; Wang, Y.H.; Li, Y.; Jiang, L.; Ma, J.W.; Chen, S.J. Highly stretchable and sensitive SBS/graphene composite fiber for strain sensors. Macromol. Mater. Eng. 2020, 305, 1900736. [Google Scholar] [CrossRef]
- He, Z.; Zhou, G.; Byun, J.H.; Lee, S.K.; Um, M.K.; Park, B.; Kim, T.; Lee, S.B.; Chou, T.W. Highly stretchable multi-walled carbon nanotube/thermoplastic polyurethane composite fibers for ultrasensitive, wearable strain sensors. Nanoscale 2019, 11, 5884–5890. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Byun, J.H.; Zhou, G.; Park, B.J.; Kim, T.H.; Lee, S.B.; Yi, J.W.; Um, M.K.; Chou, T.W. Effect of MWCNT content on the mechanical and strain-sensing performance of thermoplastic polyurethane composite fibers. Carbon 2019, 146, 701–708. [Google Scholar] [CrossRef]
- Zhang, S.; He, Z.; Zhou, G.; Jung, B.-M.; Kim, T.-H.; Park, B.-J.; Byun, J.-H.; Chou, T.-W. High conductive free-written thermoplastic polyurethane composite fibers utilized as weight-strain sensors. Compos. Sci. Technol. 2020, 189, 108011. [Google Scholar] [CrossRef]
- Tang, Z.; Jia, S.; Wang, F.; Bian, C.; Chen, Y.; Wang, Y.; Li, B. Highly stretchable core-sheath fibers via wet-spinning for wearable strain sensors. ACS Appl. Mater. Interfaces 2018, 10, 6624–6635. [Google Scholar] [CrossRef] [PubMed]
- Seyedin, S.; Uzun, S.; Levitt, A.; Anasori, B.; Dion, G.; Gogotsi, Y.; Razal, J.M. MXene composite and coaxial fibers with high stretchability and conductivity for wearable strain sensing textiles. Adv. Funct. Mater. 2020, 30, 1910504. [Google Scholar] [CrossRef]
- Gao, J.C.; Wang, X.Z.; Zhai, W.; Liu, H.; Zheng, G.Q.; Dai, K.; Mi, L.W.; Liu, C.T.; Shen, C.Y. Ultrastretchable multilayered fiber with a hollow-monolith structure for high-performance strain sensor. ACS Appl. Mater. Interfaces 2018, 10, 34592–34603. [Google Scholar] [CrossRef]
- Marsden, A.J.; Papageorgiou, D.G.; Valles, C.; Liscio, A.; Palermo, V.; Bissett, M.A.; Young, R.J.; Kinloch, I.A. Electrical percolation in graphene-polymer composites. 2D Mater. 2018, 5, 032003. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.B.; Zheng, W.G.; Yan, Q.; Yang, Y.; Wang, J.W.; Lu, Z.H.; Ji, G.Y.; Yu, Z.Z. Electrically conductive polyethylene terephthalate/graphene nanocomposites prepared by melt compounding. Polymer 2010, 51, 1191–1196. [Google Scholar] [CrossRef]
- Babinec, S.J.; Mussell, R.D.; Lundgard, R.L.; Cieslinski, R. Electroactive thermoplastics. Adv. Mater. 2000, 12, 1823–1834. [Google Scholar] [CrossRef]
- Janssen, H.K.; Tauber, U.C. The field theory approach to percolation processes. Ann. Phys. 2005, 315, 147–192. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Li, Y.L.; Dai, K.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y.; Yan, X.R.; Guo, J.; Guo, Z.H. Electrically conductive thermoplastic elastomer nanocomposites at ultralow graphene loading levels for strain sensor applications. J. Mater. Chem. C 2016, 4, 157–166. [Google Scholar] [CrossRef]
- Balberg, I. Tunneling and nonuniversal conductivity in composite-materials. Phys. Rev. Lett. 1987, 59, 1305–1308. [Google Scholar] [CrossRef]
- Pang, H.; Xu, L.; Yan, D.X.; Li, Z.M. Conductive polymer composites with segregated structures. Prog. Polym. Sci. 2014, 39, 1908–1933. [Google Scholar] [CrossRef]
- Xu, Y.T.; Wang, Y.; Zhou, C.G.; Sun, W.J.; Dai, K.; Tang, J.H.; Lei, J.; Yan, D.X.; Li, Z.M. An electrically conductive polymer composite with a co-continuous segregated structure for enhanced mechanical performance. J. Mater. Chem. C 2020, 8, 11546–11554. [Google Scholar] [CrossRef]
- Zhang, X.W.; Pan, Y.; Zheng, Q.; Yi, X.S. Time dependence of piezoresistance for the conductor-filled polymer composites. J Polym. Sci. B Polym. Phys. 2000, 38, 2739–2749. [Google Scholar] [CrossRef]
- Granero, A.J.; Wagner, P.; Wagner, K.; Razal, J.M.; Wallace, G.G.; in het Panhuis, M. Highly stretchable conducting SIBS-P3HT fibers. Adv. Funct. Mater. 2011, 21, 955–962. [Google Scholar] [CrossRef]
- Ren, M.N.; Zhou, Y.J.; Wang, Y.; Zheng, G.Q.; Dai, K.; Liu, C.T.; Shen, C.Y. Highly stretchable and durable strain sensor based on carbon nanotubes decorated thermoplastic polyurethane fibrous network with aligned wavelike structure. Chem. Eng. J. 2019, 360, 762–777. [Google Scholar] [CrossRef]
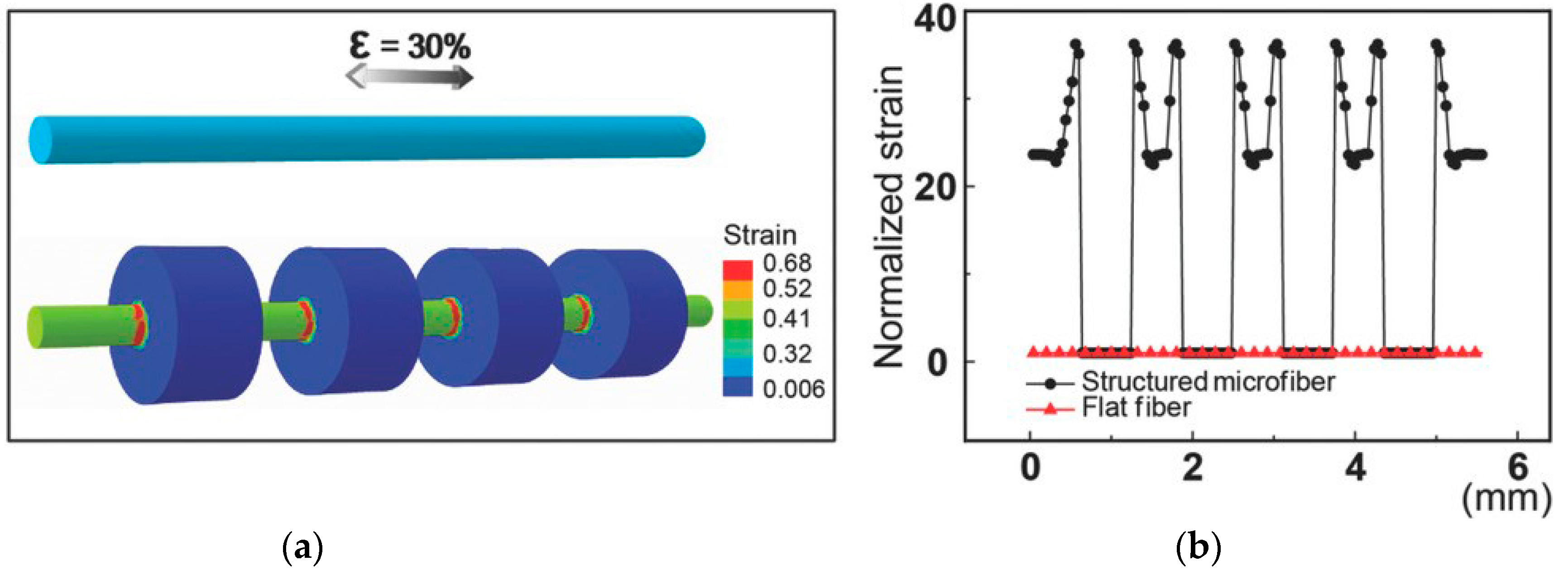
- Liu, Z.; Qi, D.; Hu, G.; Wang, H.; Jiang, Y.; Chen, G.; Luo, Y.; Loh, X.J.; Liedberg, B.; Chen, X. Surface strain redistribution on structured microfibers to enhance sensitivity of fiber-shaped stretchable strain sensors. Adv. Mater. 2018, 30, 1704229. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Jiang, N.; Su, J.; Yin, Q.; Zhang, Y.; Liu, Z.; Lin, H.; Moura, F.A.; Yuan, N.; Roth, S.; et al. A bi-sheath fiber sensor for giant tensile and torsional displacements. Adv. Funct. Mater. 2017, 27, 1702134. [Google Scholar] [CrossRef]
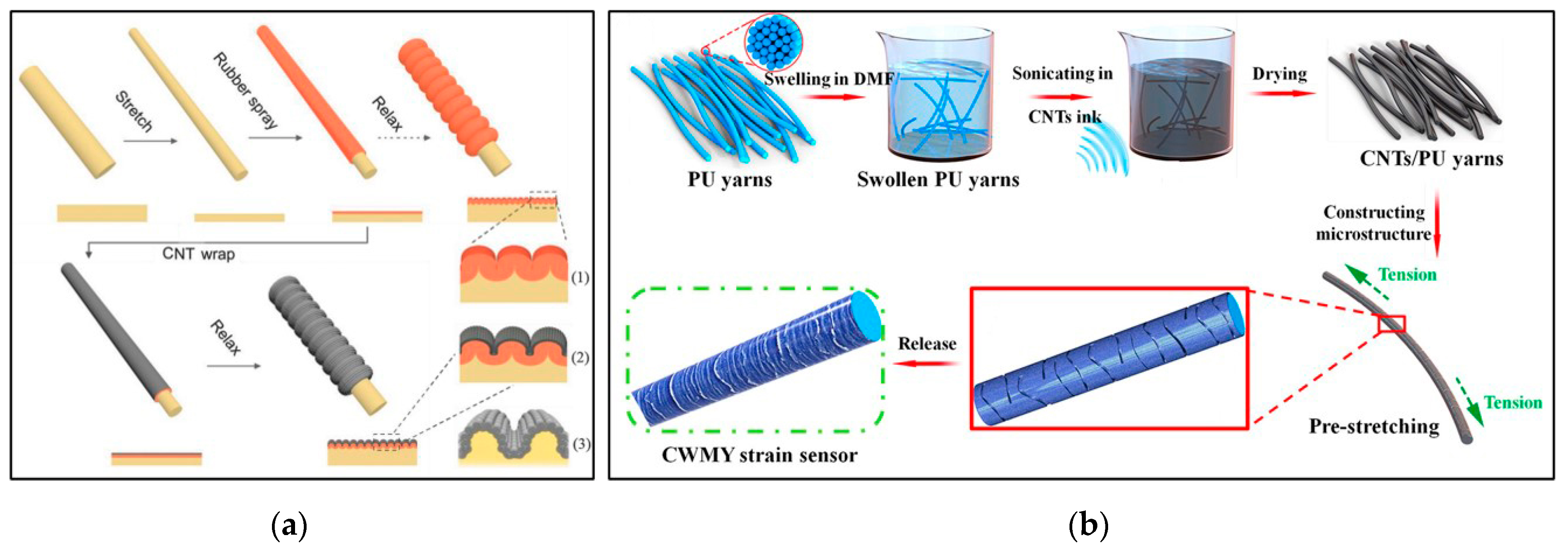
- Sun, H.; Dai, K.; Zhai, W.; Zhou, Y.; Li, J.; Zheng, G.; Li, B.; Liu, C.; Shen, C. A highly sensitive and stretchable yarn strain sensor for human motion tracking utilizing a wrinkle-assisted crack structure. ACS Appl. Mater. Interfaces 2019, 11, 36052–36062. [Google Scholar] [CrossRef]
- Cao, Z.R.; Wang, R.R.; He, T.Y.; Xu, F.F.; Sun, J. Interface-controlled conductive fibers for wearable strain sensors and stretchable conducting Wires. ACS Appl. Mater. Interfaces 2018, 10, 14087–14096. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, L.L.; He, Y.; Cheng, B.W. A novel method for fabricating elastic conductive polyurethane filaments by in-situ reduction of polydopamine and electroless silver plating. Mater. Design 2017, 113, 254–263. [Google Scholar] [CrossRef]
- Fu, L.; Yu, A.M. Carbon nanotubes based thin films: Fabrication, characterization and applications. Rev. Adv. Mater. Sci. 2014, 36, 40–61. [Google Scholar]
- Li, X.; Hua, T.; Xu, B. Electromechanical properties of a yarn strain sensor with graphene-sheath/polyurethane-core. Carbon 2017, 118, 686–698. [Google Scholar] [CrossRef]
- Cai, G.; Hao, B.; Luo, L.; Deng, Z.; Zhang, R.; Ran, J.; Tang, X.; Cheng, D.; Bi, S.; Wang, X.; et al. Highly stretchable sheath-core yarns for multifunctional wearable electronics. ACS Appl. Mater. Interfaces 2020, 12, 29717–29727. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, R.; Sun, J.; Gao, L. A stretchable and highly sensitive graphene-based fiber for sensing tensile strain, bending, and torsion. Adv. Mater. 2015, 27, 7365–7371. [Google Scholar] [CrossRef]
- Shi, B.; Wang, T.; Shi, L.; Li, J.; Wang, R.; Sun, J. Highly stretchable and strain sensitive fibers based on braid-like structure and sliver nanowires. Appl. Mater. Today 2020, 19, 100610. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, W.; Bi, L.; Chen, L.; Wang, G.; Chen, G.; Ye, C.; Pan, J. Wearable electronics for heating and sensing based on a multifunctional PET/silver nanowire/PDMS yarn. Nanoscale 2020, 12, 16562–16569. [Google Scholar] [CrossRef]
- Gao, Y.; Guo, F.Y.; Cao, P.; Liu, J.C.; Li, D.M.; Wu, J.; Wang, N.; Su, Y.W.; Zhao, Y. Winding-locked carbon nanotubes/polymer nanofibers helical yarn for ultrastretchable conductor and strain sensor. ACS Nano 2020, 14, 3442–3450. [Google Scholar] [CrossRef]
- Xie, X.X.; Huang, H.; Zhu, J.; Yu, J.R.; Wang, Y.; Hu, Z.M. A spirally layered carbon nanotube-graphene/polyurethane composite yarn for highly sensitive and stretchable strain sensor. Compos. Part A Appl. Sci. Manuf. 2020, 135, 105932. [Google Scholar] [CrossRef]
- de Mulatier, S.; Nasreldin, M.; Delattre, R.; Ramuz, M.; Djenizian, T. Electronic circuits integration in textiles for data processing in wearable technologies. Adv. Mater. Technol. 2018, 3, 1700320. [Google Scholar] [CrossRef]
- Simegnaw, A.A.; Malengier, B.; Rotich, G.; Tadesse, M.G.; Van Langenhove, L. Review on the integration of microelectronics for E-textile. Materials 2021, 14, 5113. [Google Scholar] [CrossRef]
- Linz, T.; Kallmayer, C.; Aschenbrenner, R.; Reichl, H. Embroidering electrical interconnects with conductive yarn for the integration of flexible electronic modules into fabric. In Proceedings of the Ninth IEEE International Symposium on Wearable Computers, Osaka, Japan, 18–21 October 2005; pp. 86–89. [Google Scholar]
- Trindade, I.G.; da Silva, J.M.; Miguel, R.; Pereira, M.; Lucas, J.; Oliveira, L.; Valentim, B.; Barreto, J.; Silva, M.S. Design and evaluation of novel textile wearable systems for the surveillance of vital signals. Sensors 2016, 16, 1573. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fang, Z.Q.; Mao, X.; Yang, J.L.; Yang, F.H. A wafer-level Sn-rich Au-Sn intermediate bonding technique with high strength. J Micromech. Microeng. 2013, 23, 095008. [Google Scholar] [CrossRef]
- Xu, Y.M.; Xie, X.X.; Huang, H.; Wang, Y.; Yu, J.R.; Hu, Z.M. Encapsulated core-sheath carbon nanotube-graphene/polyurethane composite fiber for highly stable, stretchable, and sensitive strain sensor. J. Mater. Sci. 2021, 56, 2296–2310. [Google Scholar] [CrossRef]
- Kwon, C.; Seong, D.; Ha, J.; Chun, D.; Bae, J.H.; Yoon, K.; Lee, M.; Woo, J.; Won, C.; Lee, S.; et al. Self-bondable and stretchable conductive composite fibers with spatially controlled percolated Ag nanoparticle networks: Novel integration strategy for wearable eectronics. Adv. Funct. Mater. 2020, 30, 2005447. [Google Scholar] [CrossRef]
- Bahadir, S.K.; Kalaoglu, F.; Jevsnik, S. The use of hot air welding technologies for manufacturing E-textile trasmission lines. Fibers Polym. 2015, 16, 1384–1394. [Google Scholar] [CrossRef] [Green Version]
- Nied, H.F. Mechanics of interface fracture with applications in electronic packaging. IEEE Trans. Device Mater Reliab. 2003, 3, 129–143. [Google Scholar] [CrossRef]
- Yang, C.-C.; Hsu, Y.-L. A review of accelerometry-based wearable motion detectors for physical activity monitoring. Sensors 2010, 10, 7772–7788. [Google Scholar] [CrossRef]
- Vu, C.C.; Kim, J. Highly sensitive E-textile strain sensors enhanced by geometrical treatment for human monitoring. Sensors 2020, 20, 2383. [Google Scholar] [CrossRef]
- Mokhlespour Esfahani, M.I.; Zobeiri, O.; Moshiri, B.; Narimani, R.; Mehravar, M.; Rashedi, E.; Parnianpour, M. Trunk motion system (TMS) using printed body worn sensor (BWS) via data fusion approach. Sensors 2017, 17, 112. [Google Scholar] [CrossRef]
- Vu, C.; Kim, J. Human motion recognition using E-textile sensor and adaptive neuro-fuzzy inference system. Fiber Polym. 2018, 19, 2657–2666. [Google Scholar] [CrossRef]
- Mattmann, C.; Clemens, F.; Tröster, G. Sensor for measuring strain in textile. Sensors 2008, 8, 3719–3732. [Google Scholar] [CrossRef]
- Jiang, Y.W.; Sadeqi, A.; Miller, E.L.; Sonkusale, S. Head motion classification using thread-based sensor and machine learning algorithm. Sci. Rep. 2021, 11, 2646. [Google Scholar] [CrossRef]
- Choi, S.; Yoon, K.; Lee, S.; Lee, H.J.; Lee, J.; Kim, D.; Kim, M.S.; Lee, T.; Pang, C. Conductive hierarchical hairy fibers for highly sensitive, stretchable, and water-resistant multimodal gesture-distinguishable sensor, VR applications. Adv. Funct. Mater. 2019, 29, 1905808. [Google Scholar] [CrossRef]
- Chen, S.; Lou, Z.; Chen, D.; Jiang, K.; Shen, G.Z. Polymer-enhanced highly stretchable conductive fiber strain sensor used for electronic data gloves. Adv. Mater. Technol. 2016, 1, 1600136. [Google Scholar] [CrossRef]
- Pu, J.H.; Zhao, X.; Zha, X.J.; Li, W.D.; Ke, K.; Bao, R.Y.; Liu, Z.Y.; Yang, M.B.; Yang, W. A strain localization directed crack control strategy for designing MXene-based customizable sensitivity and sensing range strain sensors for full-range human motion monitoring. Nano Energy 2020, 74, 104814. [Google Scholar] [CrossRef]
- Huang, Y.; Hao, C.; Liu, J.; Guo, X.; Zhang, Y.; Liu, P.; Liu, C.; Zhang, Y.; Yang, X. Highly stretchable, rapid-response strain sensor based on SWCNTs/CB nanocomposites coated on rubber/latex polymer for human motion tracking. Sens. Rev. 2019, 39, 233–245. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, D.Y.; Pang, Y.; Li, Y.X.; Wang, Q.; Zhang, T.Y.; Wang, J.B.; Liu, X.; Yang, Y.Y.; Jian, J.M.; et al. Simultaneously detecting subtle and intensive human motions based on a silver nanoparticles bridged graphene strain sensor. ACS Appl. Mater. Interfaces 2018, 10, 3948–3954. [Google Scholar] [CrossRef]
- Reissner, L.; Fischer, G.; List, R.; Taylor, W.R.; Giovanoli, P.; Calcagni, M. Minimal detectable difference of the finger and wrist range of motion: Comparison of goniometry and 3D motion analysis. J. Orthop. Surg. Res. 2019, 14, 173. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, K.S.; Jung, M.C. Flexion and extension angles of resting fingers and wrist. Int. J. Occup. Saf. Ergo 2014, 20, 91–101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, W.Y.; Zhou, Y.F.; Wang, Y.H.; Jiang, L.; Ma, J.W.; Chen, S.J.; Zhou, F.L. Core-sheath fiber-based wearable strain sensor with high stretchability and sensitivity for detecting human motion. Adv. Electron. Mater. 2021, 7, 2000865. [Google Scholar] [CrossRef]
- Lee, S.; Shin, S.; Lee, S.; Seo, J.; Lee, J.; Son, S.; Cho, H.J.; Algadi, H.; Al-Sayari, S.; Kim, D.E.; et al. Ag nanowire reinforced highly stretchable conductive fibers for wearable electronics. Adv. Funct. Mater. 2015, 25, 3114–3121. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Li, X.Y.; Kim, J.; Tong, Y.X.; Thompson, E.G.; Jiang, S.; Feng, Z.; Yu, L.; Wang, J.H.; Ha, D.S.; et al. Thermally drawn stretchable electrical and optical fiber sensors for multimodal extreme deformation sensing. Adv. Opt. Mater. 2021, 9, 2001815. [Google Scholar] [CrossRef]
- Lin, Y.; Liu, S.Q.; Chen, S.; Wei, Y.; Dong, X.C.; Liu, L. A highly stretchable and sensitive strain sensor based on graphene-elastomer composites with a novel double-interconnected network. J. Mater. Chem. C 2016, 4, 6345–6352. [Google Scholar] [CrossRef]
- Hu, N.; Karube, Y.; Yan, C.; Masuda, Z.; Fukunaga, H. Tunneling effect in a polymer/carbon nanotube nanocomposite strain sensor. Acta Mater. 2008, 56, 2929–2936. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.; Kim, D.; Joo, Y.; Park, J.; Yoon, J.; Hong, Y. Crack propagation design in transparent polymeric conductive films via carbon nanotube fiber-reinforcement and its application for highly sensitive and mechanically durable strain sensors. Smart Mater. Struct. 2019, 28, 025008. [Google Scholar] [CrossRef]
- Zhang, B.; Lei, J.; Qi, D.; Liu, Z.; Wang, Y.; Xiao, G.; Wu, J.; Zhang, W.; Huo, F.; Chen, X. Stretchable conductive fibers based on a cracking control strategy for wearable electronics. Adv. Funct. Mater. 2018, 28, 1801683. [Google Scholar] [CrossRef]
- Zhang, H. Flexible textile-based strain sensor induced by contacts. Meas. Sci. Technol. 2015, 26, 105102. [Google Scholar] [CrossRef]
- Zhang, R.; Deng, H.; Valenca, R.; Jin, J.H.; Fu, Q.; Bilotti, E.; Peijs, T. Carbon nanotube polymer coatings for textile yarns with good strain sensing capability. Sens. Actuator A Phys. 2012, 179, 83–91. [Google Scholar] [CrossRef]
- Zhang, R.; Deng, H.; Valenca, R.; Jin, J.H.; Fu, Q.; Bilotti, E.; Peijs, T. Strain sensing behaviour of elastomeric composite films containing carbon nanotubes under cyclic loading. Compos. Sci. Technol. 2013, 74, 1–5. [Google Scholar] [CrossRef]
- Yang, H.; Yao, X.; Yuan, L.; Gong, L.; Liu, Y. Strain-sensitive electrical conductivity of carbon nanotube-graphene-filled rubber composites under cyclic loading. Nanoscale 2019, 11, 578–586. [Google Scholar] [CrossRef] [PubMed]
- Rotzler, S.; Krshiwoblozki, M.V.; Schneider-Ramelow, M. Washability of E-textiles: Current testing practices and the need for standardization. Text. Res. J. 2021, 91, 2401–2417. [Google Scholar] [CrossRef]
- Yang, Z.H.; Zhai, Z.R.; Song, Z.M.; Wu, Y.Z.; Liang, J.H.; Shan, Y.F.; Zheng, J.R.; Liang, H.C.; Jiang, H.Q. Conductive and elastic 3D helical fibers for use in washable and wearable electronics. Adv. Mater. 2020, 32, 78. [Google Scholar] [CrossRef] [PubMed]















| Strain Sensors | Advantages | Disadvantages |
|---|---|---|
| Fibers or yarns | Good stretchability and flexibility, and easy to realize accurate detection of joint movement with a single direction. | Poor stability. |
| Fiber mats | Good stretchability and permeability. | Uneasy to integrate into clothing and realize the accurate detection of joint movement with single direction. |
| Fabrics | Easy to fabrication with various structures. | Poor stretchability, stability and durability. |
| Films | Good stretchability and easy-to-design patterns. | Poor permeability, difficult to integrate and unable to accurately detect joint movement with a single direction; poor comfort. |
| Aerogels or foams | Suitable for detect pressure. | Poor stretchability and hysteresis. |
| Strain Sensor | Principle | Gauge Factor | Benefits | Drawbacks |
|---|---|---|---|---|
| Resistive | Detection of resistance changes to achieve strain detection ). | [(R − R0)/R0]/ε | Easy to identify signals, wide working strain range, good frequency response characteristics, and high sensitivity. | Poor linearity, poor long-term cycle stability, and high hysteresis. |
| Capacitive | Detection of capacitance changes to achieve strain detection (C = ε0εrA/d). | [(C − C0)/C0]/ε | Good linearity, long-term cycle stability, and low hysteresis. | Limited to working strain range, susceptible to the surrounding environment, and small sensitivity. |
| Types | Conductive Materials | Conductivity (S/cm) | Characteristics |
|---|---|---|---|
| Conducting polymers | PPy | 2000 | Solution processability, low-temperature synthesis route. |
| PANI | 112 | ||
| PTh | 560 | ||
| PEDOT: PSS | 4700 | ||
| Carbon based | CB | 1000 | Light, good chemical and thermal stability, difficult to disperse. |
| CNT | 3.8 × 105 | ||
| Gr | 7200 | ||
| Metal | Au | 4.10 × 107 | Excellent electrical conductivity, brittle, heavy, poor interface compatibility. |
| Ag | 6.31 × 107 | ||
| Cu | 5.96 × 107 | ||
| EGaIn | 4.8 × 105 | ||
| Transition metal carbon/nitride material | MXene | 4600 | Hydrophilicity, good biocompatibility, but expensive, easy to oxidize. |
| Method | Merits | Demerits |
|---|---|---|
| Soldering | Tight connection and high conductivity. | Brittle fracture, high welding temperature and limited welding interface. |
| Mechanical clamping | Flexible connection and wide range of application. | Easy to break under large deformation. |
| Conductive adhesive | Simple operation and less limitation to materials. | Easily affected by temperature and humidity. |
| Type | Fabrication Method | Substrate | Sensitive Materials | Strain Range | GF | Applications | Ref. |
|---|---|---|---|---|---|---|---|
| Nanofibrous membrane | Dipping | TPU | RGO | 79% | 11 | Human motions | [13] |
| Nanofibrous membrane | Dipping and in situ reduction | TPU | ACNTs/AgNPs | 20 to 70% | 1.04 × 105 | Human motions | [14] |
| Fabric | Dipping and screen printing | PET/SP | SWCNT/Ag pastes | 20% | 71.5 | Glove and speaking | [111] |
| Fabric | Screen printing and chemical vapor deposition | Nylon/Lycra | PPy | 50% | N/A | Trunk motion | [112] |
| Fabric | Dipping | PET/SP | SWCNT | 0–50% | 2.1–4.8 | Human Motion Recognition | [113] |
| Fiber | Melting extrusion | TPE | CB | 80% | N/A | Upper body postures recognition | [114] |
| Fiber | Spinning | TPE | SWCNT | 100% | 425 | Wrist motion | [38] |
| Fiber | Deposition | PDMS | Au or CNT | 125% | N/A | Knee joint motin | [88] |
| Thread | Coating | 64% Polyester, 36% Polyurethane | Carbon Resistive Ink | 10% | N/A | Head motion | [115] |
| Fiber | Spinning | TPU | AgNWs/MWCNT | 50–150% | 13 | Monitor the weight and shape of an object | [73] |
| Fiber | Coating and imprinting technique | PU | AgNPs/AgNWs/CB | 200% | 1041 | Data glove | [116] |
| Thread | Dripping | Nanofibers cladded core-spun thread | AgNWs/ | 10–50% | 0.688 | Data glove | [117] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, F.; Hu, J.; Yan, X. Review of Fiber- or Yarn-Based Wearable Resistive Strain Sensors: Structural Design, Fabrication Technologies and Applications. Textiles 2022, 2, 81-111. https://doi.org/10.3390/textiles2010005
Huang F, Hu J, Yan X. Review of Fiber- or Yarn-Based Wearable Resistive Strain Sensors: Structural Design, Fabrication Technologies and Applications. Textiles. 2022; 2(1):81-111. https://doi.org/10.3390/textiles2010005
Chicago/Turabian StyleHuang, Fei, Jiyong Hu, and Xiong Yan. 2022. "Review of Fiber- or Yarn-Based Wearable Resistive Strain Sensors: Structural Design, Fabrication Technologies and Applications" Textiles 2, no. 1: 81-111. https://doi.org/10.3390/textiles2010005
APA StyleHuang, F., Hu, J., & Yan, X. (2022). Review of Fiber- or Yarn-Based Wearable Resistive Strain Sensors: Structural Design, Fabrication Technologies and Applications. Textiles, 2(1), 81-111. https://doi.org/10.3390/textiles2010005