1. Introduction
The term microplastic (MPs) is used to indicate the plastic particles spread in the environment, with sizes ranging from 5 mm to 0.1 µm. They can already be manufactured as small particles (pharmaceutical, detergent and cosmetics products) and are called primary MPs, or they can be derived from the disintegration of larger plastic waste and in this case, they are called secondary MPs.
Millions of tons of MPs are released yearly in the marine environment, especially in closed seas, such as the Mediterranean Sea, and considering their small sizes, the amount of them per cubic meter of sea water is significant. Currently, the procedures adopted to measure the MPs concentration at sea are very expensive for logistic aspects, human resources and laboratory analysis instrumentation to be involved. Moreover, these procedures are very time-consuming; about one month is necessary to obtain results from a short mission campaign related to a surface transept of one nautical mile. For these reasons, MP monitoring is performed occasionally over very large areas and consequently, the data available in the specialized literature are poor.
In this paper, a simple solution to plan periodical in situ measurements of MPs at sea and to obtain related results in less than 24 h is proposed. The solution was tested in the project NET4mPLASTIC aimed at monitoring the MPs in the Adriatic Sea and it confirmed the difficulties involved in measuring this phenomenon, but it demonstrated that it is possible to find a sub-optimal solution to obtain data in near real-time. Indications of future optimization are also indicated using combined in situ instrumentation and laboratory water sample analysis methods.
2. Classical MP Detection Methods
The classical methodology used to identify and analyze the MPs on the sea surface is well described in ref. [
1,
2], where each measurement campaign entails the following steps:
Execution of a transept of about 1–2 nautical miles with a 200–300 µm manta net;
In the laboratory, the samples collected in the manta net bottle are treated with hydrogen peroxide H2O2 to remove the biological debris;
Plastic particles are hand-picked using laboratory tweezers and transferred to glass jars;
All particles are then counted, weighed, dried and classified according to their shape and color using a microscope and Fourier transform infrared (FTIR) spectroscopy to identify the type of polymers.
The step 4 described above is very time-demanding to obtain reliable and complete data; usually, a full month is necessary to obtain the results for a single monitoring transept. In the last decade, many image processing software tools have been implemented and tested to support scientists in their laboratory analysis, but the process remains complex and is not able to provide results within 24 h from the execution of the sample collection at sea.
The significant delay in the sample collection process and the availability of the results makes it difficult to implement an efficient monitoring strategy of MPs at sea to gain a continuous (e.g., monthly) understanding of the situation of the MP distribution and typology in a specific area.
The method currently adopted and the related evolutions with FTIR hardware and software, improving their performance year by year, can be used to obtain detailed MPs data, including detailed size distribution, shape classification and type of polymers, but it can be combined with a rapid method to immediately (within a few hours from the collection of the samples) obtain raw information regarding the concentration of MPs and related size distribution.
The implementation of this rapid method is possible by directly using in situ instrumentation to immediately obtain data to be processed, avoiding the laboratory analysis steps that introduce a long time delay to obtain the results; the next section provides an overview of the instrumentation currently available on the market.
3. State of the Art of MP In Situ Instrumentation
In the last ten years, many measurement principles have been identified and tested in laboratories in controlled conditions, but most of them have not been engineered to produce a reliable instrument that is available on the market. Probably, the development of MP in situ detection devices is not considered a profitable business for the main suppliers of marine instrumentation for chemical and physical properties of water, such as CTD and similar probes (pH, turbidity, dissolved oxygen, chlorophyll, etc.). We think that now and in the coming years, the problem of measuring MPs at sea is becoming so vital that it is necessary to define strategies for the implementation of continuous measurement campaigns of this phenomenon in order to understand it better and, consequently, to be able to implement effective actions to mitigate it. The actuation of these campaigns will need the availability of off-the-shelf dedicated instrumentation that is focused on the detection of MPs because the current methods are ex situ methods, time-consuming and require expensive laboratory equipment.
To define the current state of the art of the instrumentation used to measure directly at sea the presence of MPs is not easy; if we consider all the measurement principles and prototypes in the development phase, there are many proposals with supporting scientific literature, but no instrument manufacturers have proposed a device that solves the problem of MP measurement at sea. There are solutions that rely on polarized light scattering [
3] and others adopt resonance microwave spectroscopy [
4]. In ref. [
5], a summary of the results obtained with the following different technologies is reported:
Chemical Measurements
Mechanical Measurements
- d.
Acoustophoresis
- e.
Ultrasound
Electrical Measurements
- f.
Impedance spectroscopy
- g.
Dielectrophoresis
These results demonstrate the capability of the proposed methods to in situ detect the MPs in water, which may lead to their application in water quality sensing and monitoring. However, none of the instruments that rely on these technologies are currently available on the market.
In order to describe the real current status, in this paper, we will describe only the instrumentation available on the market with clear and formal technical specifications and not prototypes of similar solutions.
After interviews with the main worldwide suppliers of marine instrumentation, we have identified an instrument that is suitable for in situ detection of MPs at sea and this is the LISST-Holo2 Submersible Digital Holographic Camera. We predicted in advance that it is not the optimal solution in term of performance and functionalities, but it is a good starting point for the development of a reliable and efficient in situ device for the measurement of MP parameters.
The optimal solution should be a sensor that satisfies the following main requirements:
Suitable to be deployed in water for transept navigation;
Able to collect data directly in water during the navigation;
The collected data with a post-processing time of a few hours shall provide the following parameters for the MPs detected:
- h.
Whole concentration;
- i.
Size distribution;
- j.
Shapes;
- k.
Type of polymer.
Portable and battery powered;
Reliable;
Durable;
Cost effective.
The LISST-Holo2 is able to provide the parameters a, b and c, but with some degree of uncertainty that will be described in the next sections of the present paper.
4. Material and Methods: Innovative Quick MP Detection Solution
The LISST-Holo2 can be used on board of a boat to execute the monitoring along coastal transepts, but to dramatically reduce the logistic costs, it is possible also to fix it below the hull of a remote-controlled surface marine drone. This is the solution we adopted within the project NET4mPLASTIC that aimed to demonstrate the existence of technologies on the market that can be used to develop autonomous systems that are able to carry out quick and cost-effective monitoring campaigns for coastal MP measurement.
In the project NET4mPLASTIC, a suitable and cost-effective marine drone was identified on the market and it was equipped with the
LISST-Holo2, as shown in the
Figure 1,
Figure 2 and
Figure 3 below.
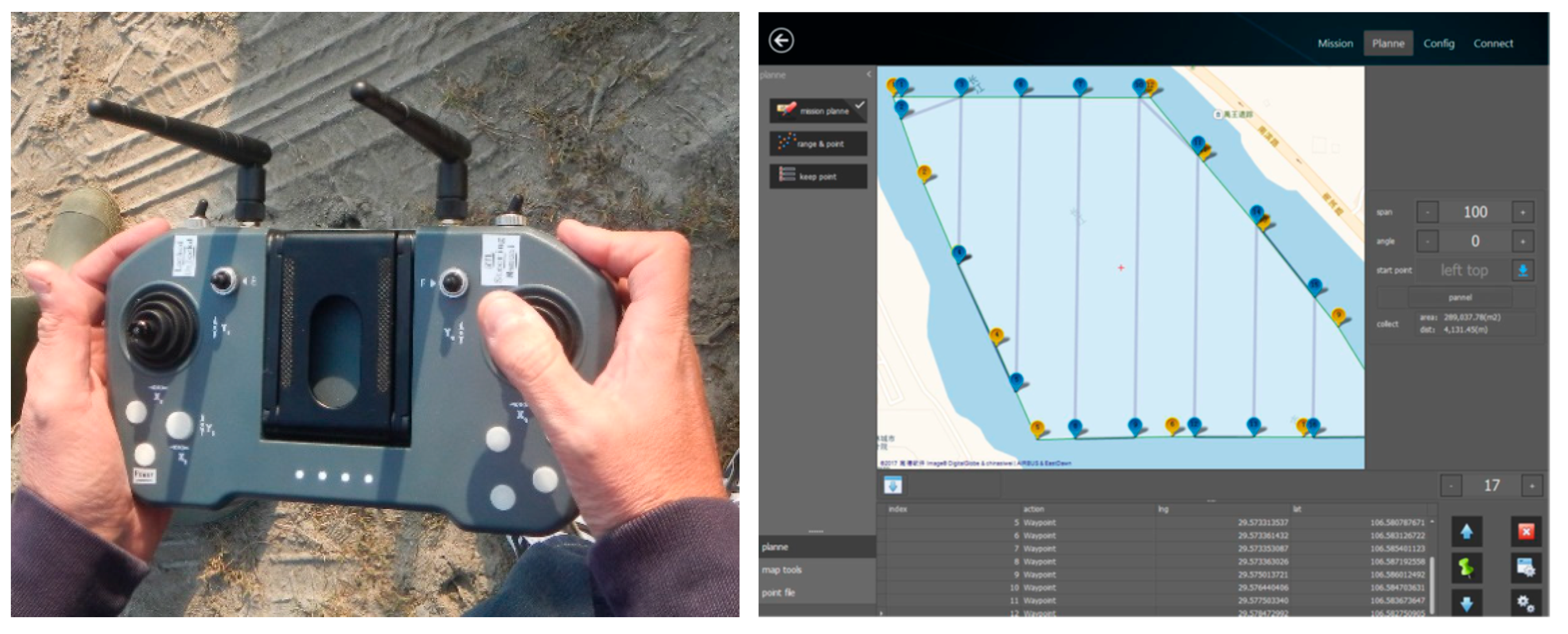
The marine drone is 1100 × 560 × 800 mm in size and has a weight of 20 kg, which includes the battery, propellers and navigation equipment. It is powered by two lithium rechargeable battery packs with a capacity of 40Ah@30VDC each to supply 2 brushless DC propellers that allow a max speed of 3 m/s. A GNSS receiver and INS allows accurate remote control via WiFi or a UHF radio link with a console or a PC software module to plan the monitoring mission route. The battery allows it to operate continuously for about 3 h to execute at least one mission of six nautical miles. The drone is very simple to use and no specific training is necessary.
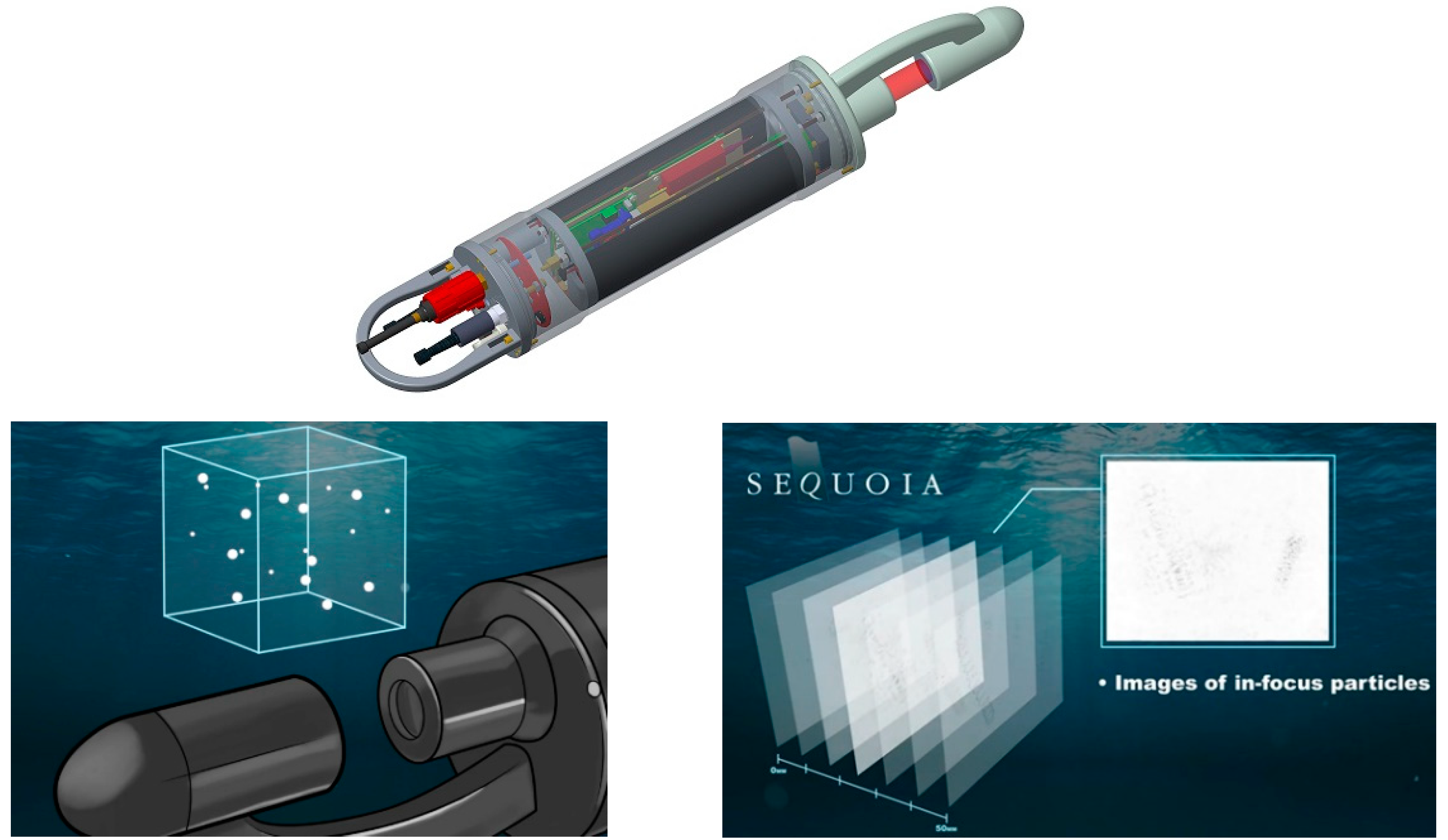
The
LISST-Holo2 is fixed below the drone hull to detect the MPs in the first layer of about 30–40 cm below the sea surface. This instrument captures holograms, i.e., 3D images, of suspended particles as shown in
Figure 4.
Holography permits a photograph-like view of particles in water. Photography suffers from a small depth of focus, so that only a small volume of water can be studied with each photo. In contrast, holography has a high total depth-of-field and, therefore, allows us to view particles in a larger volume with each image. Holography also achieves finer resolution, revealing features as small as a few microns in some cases. Thus, in addition to measuring what particles are present in water, one can also measure the particle size distribution (PSD) as equivalent spheres. Finally, because holography uses micro-second laser pulses (roughly 1000 times faster than photography), the images are frozen even at high relative water velocities and in our case, a drone in navigation at about 2 knots along a transept was used.
Upon processing, particle size, distribution, concentration and images of all particles in the beam are recovered. The LISST-Holo2 instrument is specifically designed to improve the measurement of particle shape and size using holography; this technique provides an in-focus image of every particle in the sample volume. Once a crisp image of the particle is obtained, the number of pixels it occupies can be converted to an equivalent spherical diameter (ESD), that is, the diameter of a circle that contains the same number of pixels. Thus, shape is accounted for in the calculation of particle size.
With a hologram rate of 20 frames per second, the probability of obtaining micro-litters with the holograms is very high and is also the case with a very low concentration of micro-particles. A transept of one nautical mile can be carried out in half an hour with a speed of 2 knots; thus, the amount of holograms generated to be post-processed is about 36,000.
The first post-processing step is to transfer the holograms from the instrument to the PC hard drive and this process takes about half an hour.
The second step is to discard the holograms with no particles detected; currently, this process is executed manually with a specific software tool and a time of about 2 h is required to process 36,000 holograms. In addition, in the case of a significant concentration of micro-litters, usually, only 1–2% of the holograms contain the micro-particles detected.
In the third step, only the holograms with detected micro-litters are processed by means of a custom MatlabTM software application to obtain, over a period of time ranging from 1 h to 3 h, the processing results with the whole micro-particle concentrations and related size distribution in the range from 25 µm to 5 mm.
The fourth step is a rapid manual check of all vignettes related to plankton, micro algae, fish eggs and other organic matters to discard them from the calculation of micro-litter concentration and side distribution. This final step can be executed in less than one hour; thus, the analysis results are available in less than 8 h. This time can be reduced to a couple of hours if the transept is reduced to 1 km and the sampling rate is reduced to 10 holograms per second. In addition, this optimization step can be introduced after the execution of several missions in the same area that have confirmed its typical micro-litter distribution parameters.
After the description of how to use the LISST-Holo2 sensor, the main question is the following: are we sure that all detected micro-litters are MPs? The answer is no, but the results from the classical analysis methods using water samples collected in the same monitored area show that about the 80% of particles are MPs, as described in the next section of the paper.
5. MP Detection Results in Net4mPlastic Project
The project NET4mPLASTIC (New Technologies for Macro and Microplastic Detection and Analysis in the Adriatic Basin) is an Interreg project in Italy and Croatia that ran from January 2019 to June 2022 and was aimed at improving the monitoring quality of marine waters through the use of an integrated approach for the identification of accumulation areas and for the implementation of mitigation strategies. This took place through the implementation of innovative systems that are capable of providing real-time monitoring, early warning bulletins and forecasts of the distribution of microplastics in the sea. The information produced also increases the possibility of better identification of the areas of origin of microplastics in the Adriatic Sea. As for the MP monitoring and data presentation results, the project achieved the following:
A Lagrangian monitoring node composed of a remote-controlled surface marine drone integrated with a LISST-Holo2 sensor, a CTD and a mini-manta;
A software platform that relied on database and Web-GIS technologies to integrate the visualization, in the form of a plot and table, of the following:
Mission collected data with related analysis results;
Model data showing the seasonal trend of MP distribution and meteo-marine parameters (surface temperature, conductibility, salinity and sea current);
Notification in real time (delay of one day) of the eventual hazard situations correlated to MP distribution in a specific area with particular meteo-marine conditions. The hazard level is stated considering the percentiles calculated with a mathematical model that estimates the MP seasonal distribution in the last 4 years.
In this paper, we will place a focus on the mission data results obtained with the Lagrangian node shown in the
Figure 5 below, where the marine drone is equipped below the hull with
LISST-HOLO2 and CTD sensors and tows a mini-manta to enable compared analysis with the classical MP detection methods adopted in the laboratory.
The missions were carried out in Adriatic coastal areas in Goro (Italy) and in Rijeka and Split (Croatia) in autumn 2021 and spring 2022 and a sample of the path is shown in the map below in
Figure 6.
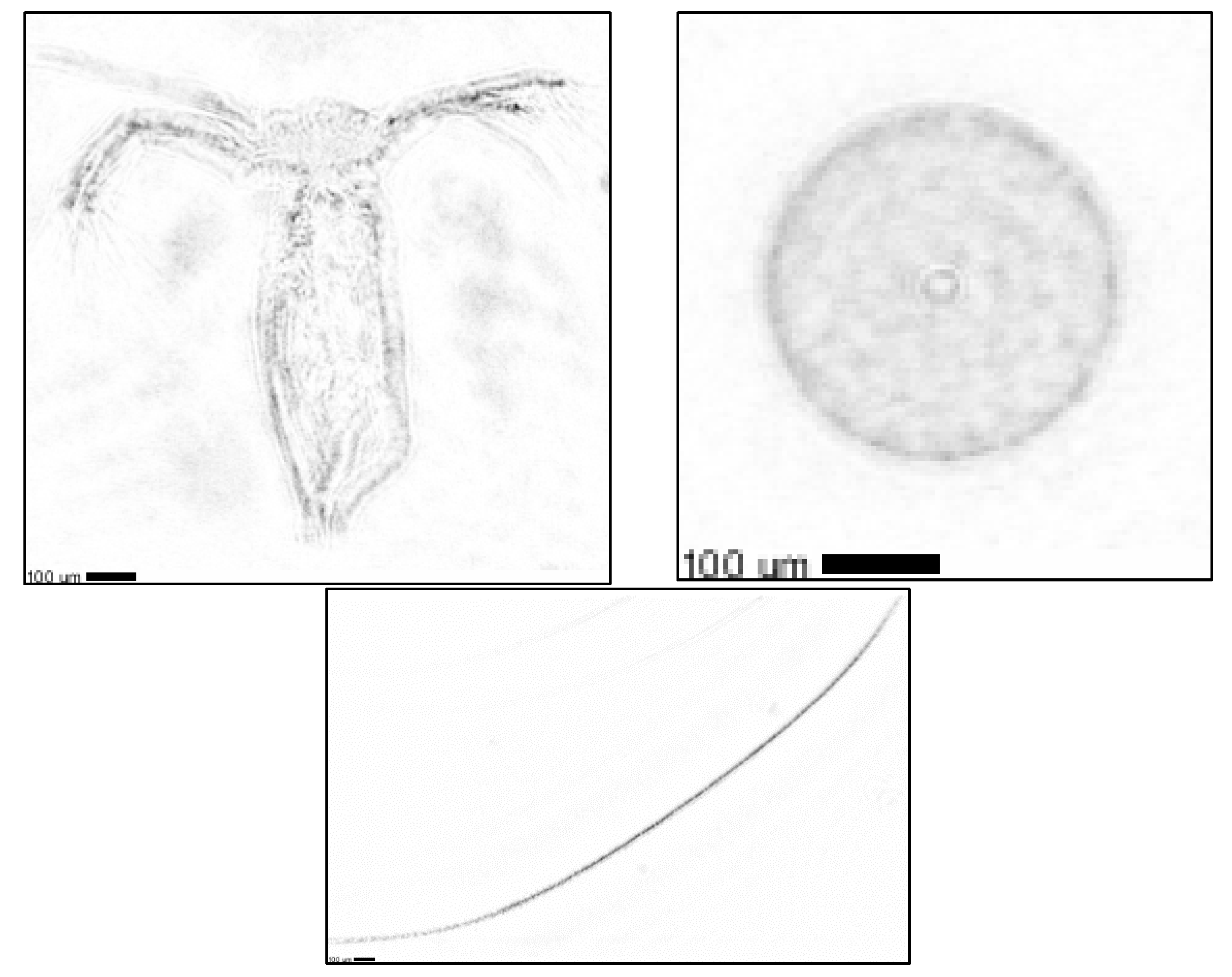
Some samples of the particle images collected are shown below in
Figure 7; two are clearly biological mattes and one is a plastic fiber.
With the missions carried out in the Croatia coast, the sea surface concentration of MPs measured is about 150 particles/km, whereas in the Po delta area, the concentration increases to about 2000 particles/km. These values are compliant with the results of other missions carried out 3–4 years ago with results of about 500 particles/km [
6].
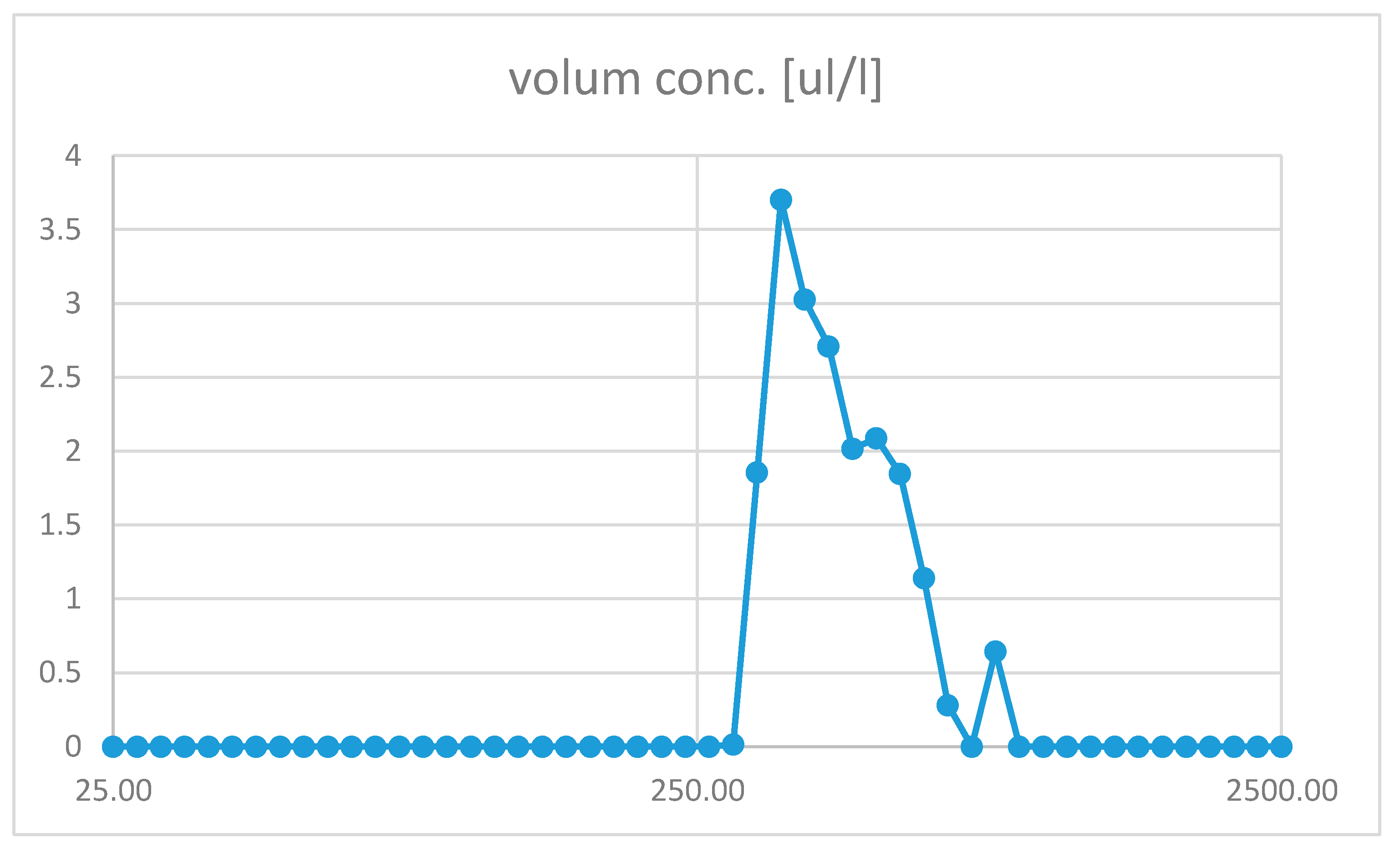
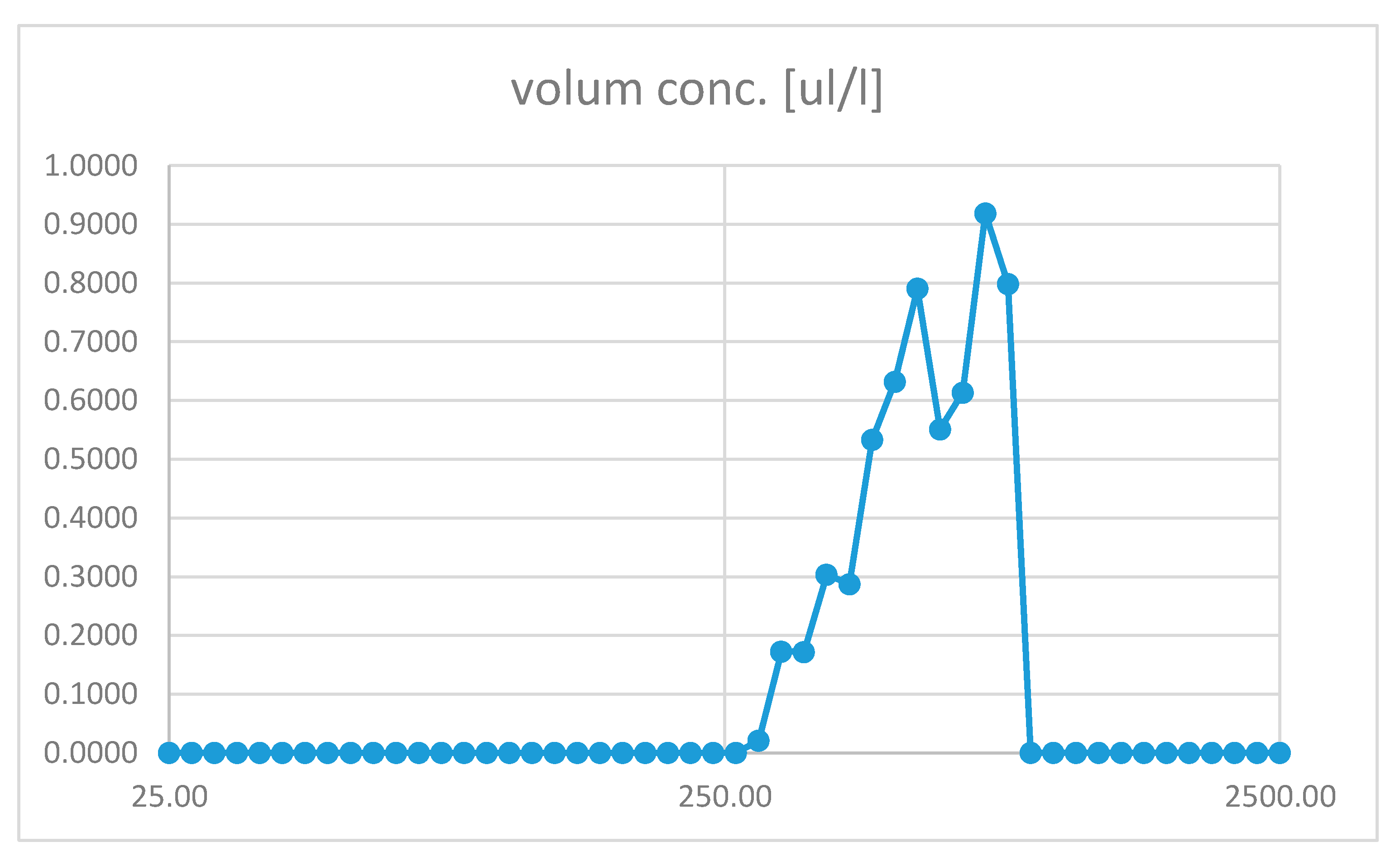
One of the main result of the NET4mPLASTIC project was the possibility to immediately obtain (in less than 1 day) concentration and the size distribution measurements, as shown in
Figure 8 and
Figure 9, but above all, it was verified that the largest amount of MP particles is concentrated in the size range from a few µm up to 100–200 µm. This range is not considered in pictures 8 and 9 because in the hologram post-processing software application, it was set to a range of 250–2500 µm, which was compatible with the mesh of the mini-manta (300 µm), in order to compare the results of the
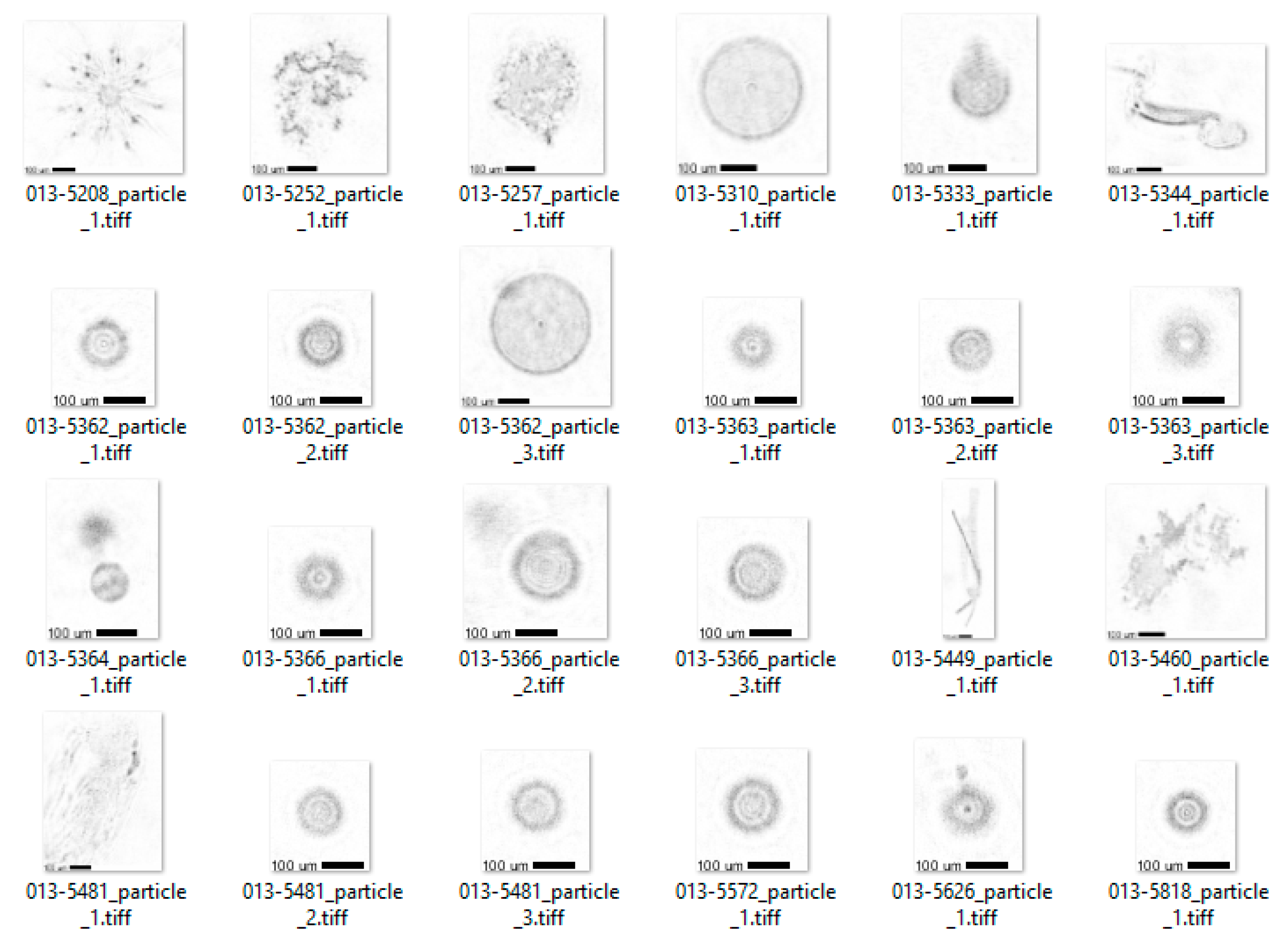
LISST-HOLO2 sensor and the results provided by the classical methods of laboratory analysis. Samples of particles images collected during a mission are shown in
Figure 10.
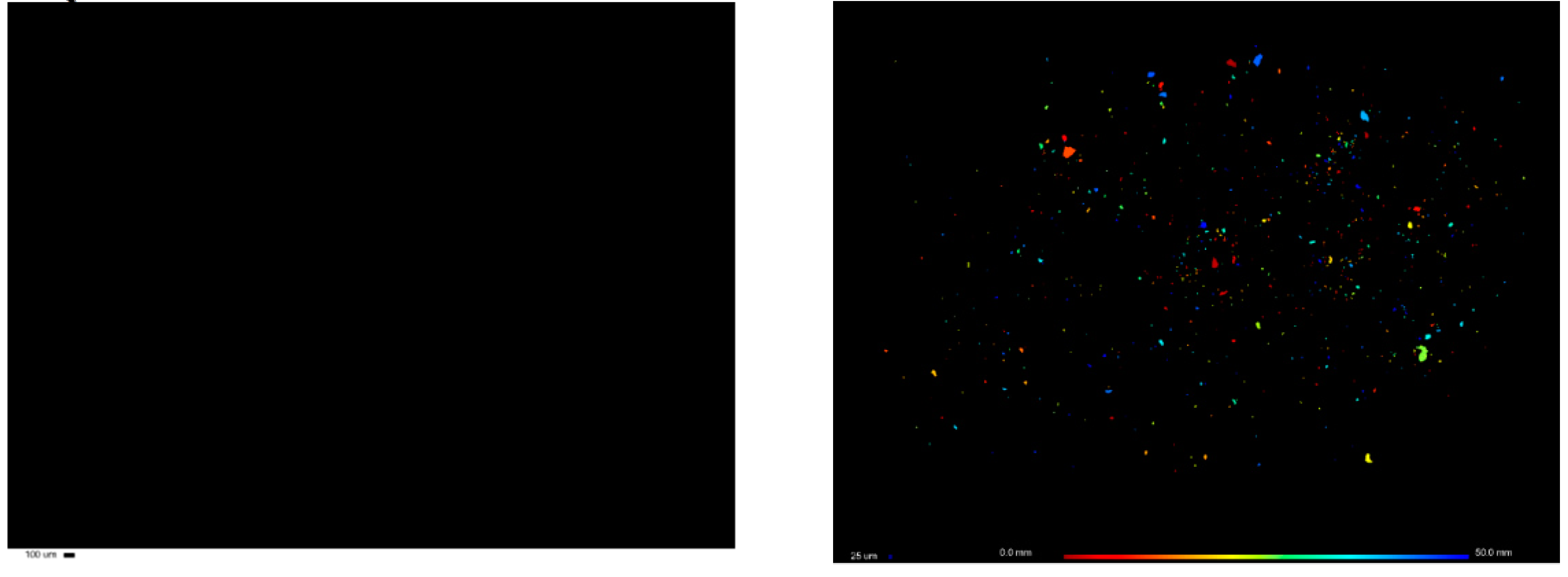
As shown in the sample in
Figure 11, a comparison between hologram processing with reduced size range (250–2500 µm) and extended range (25–2500 µm) software settings was carried out.
For any mission sites, the holograms show a significant quantity of MPs with very reduced sizes in the range from one to a few tens of µm. The limit of LISST-HOLO2 is imposed by its pixel resolution (1 pixel = 4 µm); thus, it is very difficult to identify particles with a size less than 25–50 µm. Moreover, the classical laboratory analysis methods are very time-demanding and require particular spectral instrumentation to obtain reliable results.
6. Conclusions
The method adopted in the project NET4mPLASTIC to monitor, in situ, the presence of MPs in a coastal area and to obtain rapid information regarding volume concentration and size distribution is not able to provide information concerning the material of the detected particles and can be characterized by some acceptable mistakes. However, this method is able to immediately provide (typically less than 24 hours) raw results concerning MP concentration and this information is very useful for the implementation of an “early warning system”, especially for the fish farms in coastal areas and for similar activities.
7. Near Future Development
In the few last years, the evolution related to the hardware and software of image processing has been impressive. The
LISST-HOLO2 that is able to quickly collect holograms at sea is a good starting point, especially because it can be easily integrated into a surface marine drone. An increase in its resolution could allow us to obtain more accurate images and better detect the MPs with a size of a few micrometers (the majority of MPs). Integrating a type of small bottle sampling revolver in the drone, together with
LISST-HOLO2, could be a solution to confirm the in situ measurements with other rapid optical laboratory analysis procedures that have emerged in the last few years, as indicated in [
7]. Thus, the autonomous Lagrangian node composed of a remote-controlled surface marine drone, integrated with
LISST-HOLO2 with improved resolution and a compact water sampler with about 10 bottles of 25cl each that are activated by a timer or on user command, can be a simple and cost-effective solution to rapidly obtain a row estimation of MP distribution and concentration. With a delay of a few days, additional details can be available using an innovative laboratory analysis procedure, such as the one reported in [
7,
8,
9,
10,
11,
12,
13], in samples of sea water time that correlate with the collected hologram images.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










