
Multidimensional Separation by Magnetic Seeded Filtration: Theoretical Study


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Models
2.1. Discrete PBE
2.2. Monte Carlo
2.3. Magnetic Separation
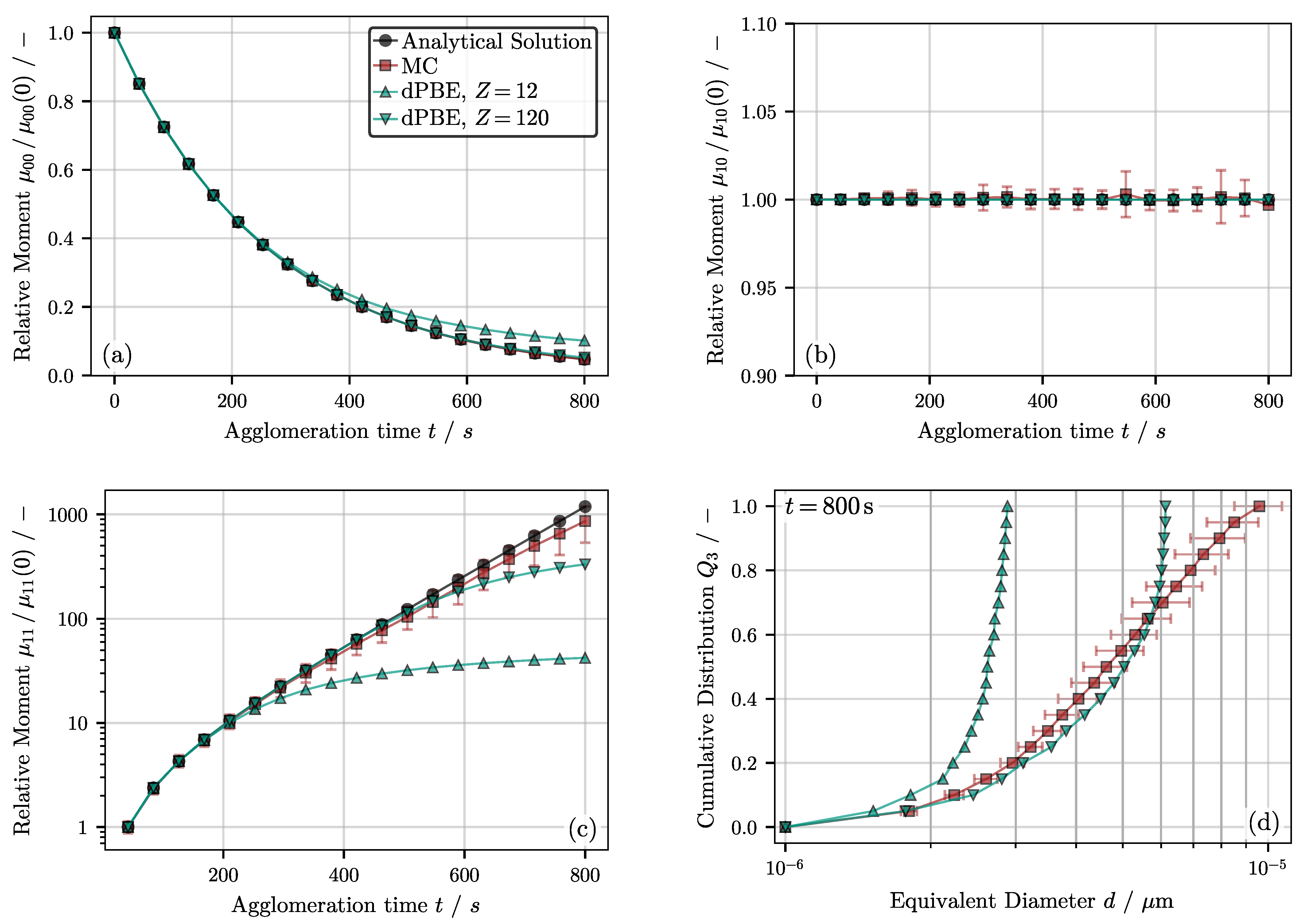
3. Validation and Grid Study
3.1. Validation
3.2. Grid Study
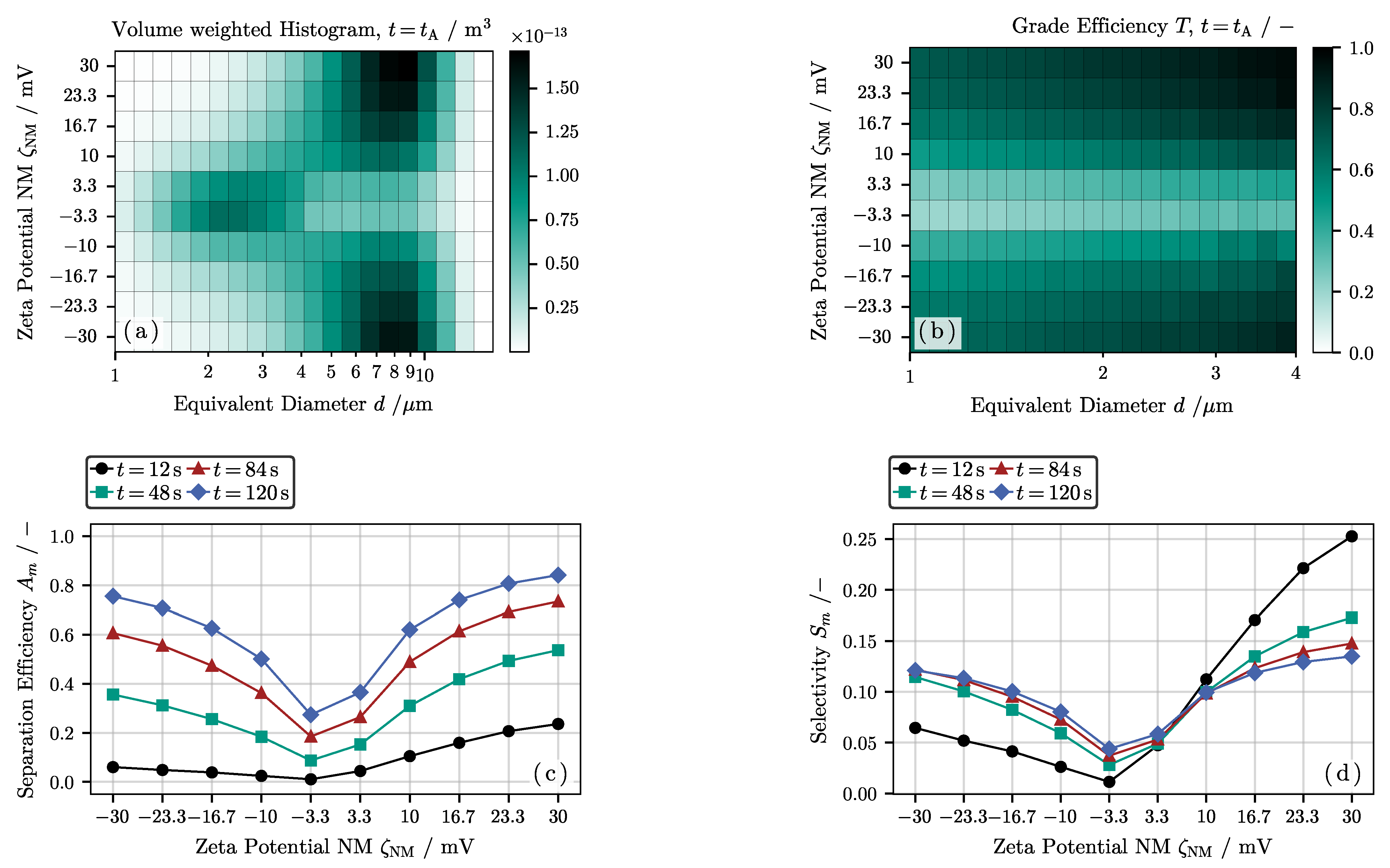
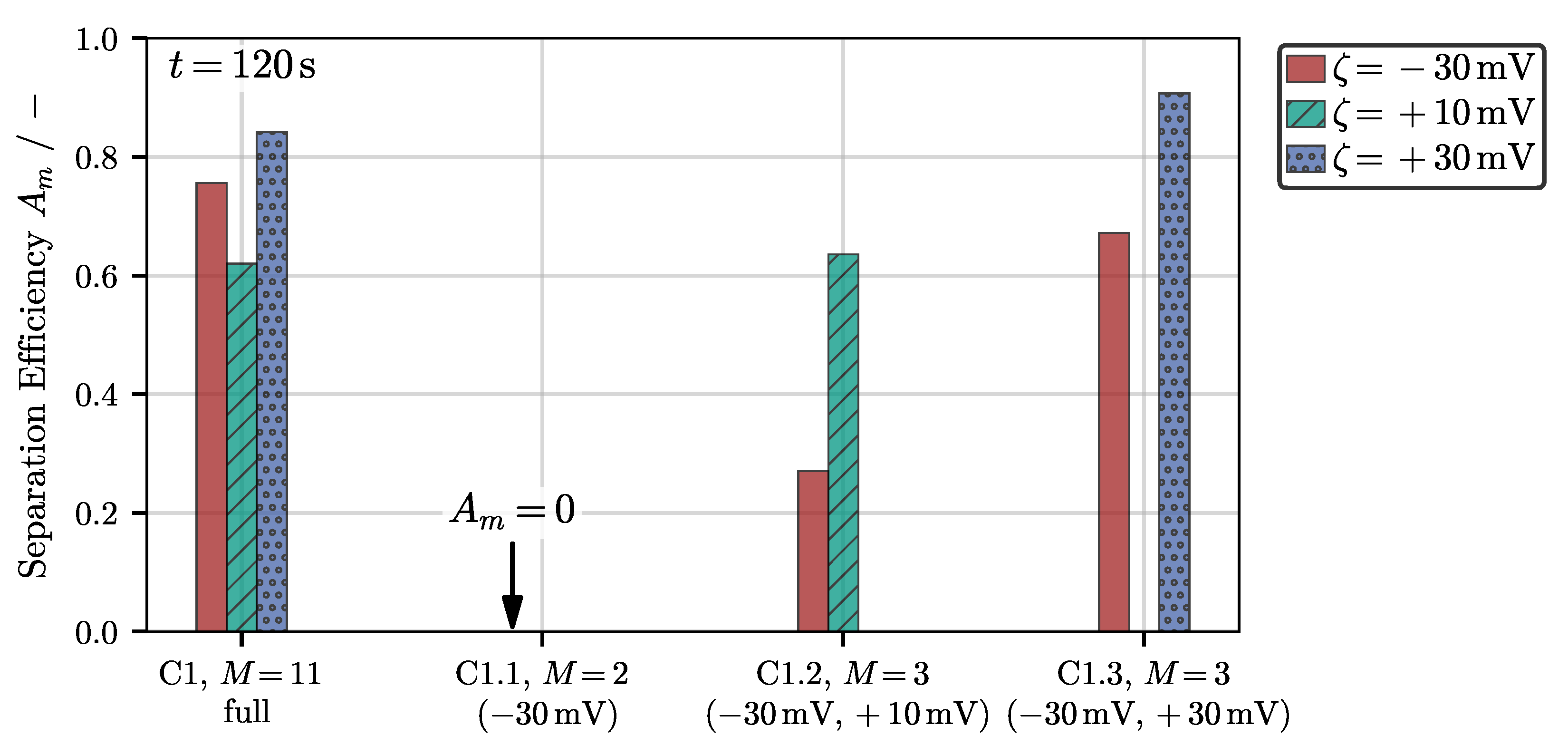
4. Case Studies
4.1. Study Structure
4.2. Results Case 1: Charge-Based Separation
4.3. Results Case 2: Hydrophobicity-Based Separation
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 1D, 2D, 3D | 1-, 2-, 3-dimensional |
| dPBE | Discrete population balance equations |
| MC | Monte Carlo |
| MSF | Magnetic seeded filtration |
| ODE | Ordinary differential equation |
| PBE | Population balance equations |
| RH | Relative hydrophobicity |
References
- Bell, T.A. Challenges in the scale-up of particulate processes—An industrial perspective. Powder Technol. 2005, 150, 60–71. [Google Scholar] [CrossRef]
- Merrow, E.W. Linking R&D to Problems Experienced in Solids Processing; Report; RAND Corp.: Santa Monica, CA, USA, 1984. [Google Scholar]
- Buchwald, T.; Schach, E.; Peuker, U.A. A framework for the description of multidimensional particle separation processes. Powder Technol. 2024, 433, 119165. [Google Scholar] [CrossRef]
- Bachmann, K.; Furat, O.; Gutzmer, J.; Leißner, T.; Peuker, U.; Schmidt, V. Stochastic Modeling of Multidimensional Particle Properties Using Parametric Copulas. Microsc. Microanal. 2019, 25, 720–734. [Google Scholar] [CrossRef]
- Giesler, J.; Weirauch, L.; Thöming, J.; Baune, M.; Pesch, G.R. Separating microparticles by material and size using dielectrophoretic chromatography with frequency modulation. Sci. Rep. 2021, 11, 16861. [Google Scholar] [CrossRef] [PubMed]
- Lösch, P.; Nikolaus, K.; Antonyuk, S. Fractionating of finest particles using cross-flow separation with superimposed electric field. Sep. Purif. Technol. 2021, 257, 117820. [Google Scholar] [CrossRef]
- Schach, E.; Buchmann, M.; Tolosana-Delgado, R.; Leißner, T.; Kern, M.; Gerald van den Boogaart, K.; Rudolph, M.; Peuker, U.A. Multidimensional characterization of separation processes—Part 1: Introducing kernel methods and entropy in the context of mineral processing using SEM-based image analysis. Miner. Eng. 2019, 137, 78–86. [Google Scholar] [CrossRef]
- Winkler, M.; Rhein, F.; Nirschl, H.; Gleiss, M. Real-Time Modeling of Volume and Form Dependent Nanoparticle Fractionation in Tubular Centrifuges. Nanomaterials 2022, 12, 3161. [Google Scholar] [CrossRef]
- Rhein, F.; Zhai, O.; Schmid, E.; Nirschl, H. Multidimensional Separation by Magnetic Seeded Filtration: Experimental Studies. Powders 2023, 2, 588–606. [Google Scholar] [CrossRef]
- Rhein, F.; Nirschl, H.; Kaegi, R. Separation of Microplastic Particles from Sewage Sludge Extracts Using Magnetic Seeded Filtration. Water Res. X 2022, 17, 100155. [Google Scholar] [CrossRef]
- Ramkrishna, D. Population Balances: Theory and Applications to Particulate Systems in Engineering; Academic Press: San Diego, CA, USA, 2000. [Google Scholar] [CrossRef]
- Briesen, H. Modeling of Suspension Crystallization Processes with Complex Particle Characterization, Habilitation. Postdoctoral Thesis, RWTH Aachen University, Aachen, Germany, 2008. [Google Scholar] [CrossRef]
- Rhein, F.; Ruß, F.; Nirschl, H. Collision case model for population balance equations in agglomerating heterogeneous colloidal systems: Theory and experiment. Colloids Surf. A Physicochem. Eng. Asp. 2019, 572, 67–78. [Google Scholar] [CrossRef]
- Rhein, F.; Hibbe, L.; Nirschl, H. Hybrid modeling of hetero-agglomeration processes: A framework for model selection and arrangement. Eng. Comput. 2023, 40, 583–604. [Google Scholar] [CrossRef]
- Jeldres, R.I.; Fawell, P.D.; Florio, B.J. Population balance modelling to describe the particle aggregation process: A review. Powder Technol. 2018, 326, 190–207. [Google Scholar] [CrossRef]
- Taboada-Serrano, P.; Chin, C.J.; Yiacoumi, S.; Tsouris, C. Modeling aggregation of colloidal particles. Curr. Opin. Colloid Interface Sci. 2005, 10, 123–132. [Google Scholar] [CrossRef]
- Elimelech, M. Particle Deposition and Aggregation: Measurement, Modelling and Simulation; Colloid and Surface Engineering Series; Butterworth-Heinemann: Woburn, MA, USA, 1998; pp. XV, 441 S. [Google Scholar] [CrossRef]
- Chin, C.J.; Yiacoumi, S.; Tsouris, C. Shear-Induced Flocculation of Colloidal Particles in Stirred Tanks. J. Colloid Interface Sci. 1998, 206, 532–545. [Google Scholar] [CrossRef] [PubMed]
- Liffman, K. A direct simulation Monte-Carlo method for cluster coagulation. J. Comput. Phys. 1992, 100, 116–127. [Google Scholar] [CrossRef]
- Scott, W.T. Analytic Studies of Cloud Droplet Coalescence I. J. Atmos. Sci. 1968, 25, 54–65. [Google Scholar] [CrossRef]
- Kumar, J.; Peglow, M.; Warnecke, G.; Heinrich, S. The cell average technique for solving multi-dimensional aggregation population balance equations. Comput. Chem. Eng. 2008, 32, 1810–1830. [Google Scholar] [CrossRef]
- Kumar, J. Numerical Approximations of Population Balance Equations in Particulate Systems. Ph.D. Thesis, Otto-von-Guericke-Universität Magdeburg, Magdeburg, Germany, 2007. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, H.; Zheng, C. Accelerating population balance-Monte Carlo simulation for coagulation dynamics from the Markov jump model, stochastic algorithm and GPU parallel computing. J. Comput. Phys. 2015, 281, 844–863. [Google Scholar] [CrossRef]
- Kruis, F.E.; Maisels, A.; Fissan, H. Direct simulation Monte Carlo method for particle coagulation and aggregation. AIChE J. 2000, 46, 1735–1742. [Google Scholar] [CrossRef]
- Eibeck, A.; Wagner, W. An Efficient Stochastic Algorithm for Studying Coagulation Dynamics and Gelation Phenomena. SIAM J. Sci. Comput. 2000, 22, 802–821. [Google Scholar] [CrossRef]
- Goodson, M.; Kraft, M. An Efficient Stochastic Algorithm for Simulating Nano-particle Dynamics. J. Comput. Phys. 2002, 183, 210–232. [Google Scholar] [CrossRef]
- Kékicheff, P. The long-range attraction between hydrophobic macroscopic surfaces. Adv. Colloid Interface Sci. 2019, 270, 191–215. [Google Scholar] [CrossRef]
- Christenson, H.K.; Claesson, P.M. Direct measurements of the force between hydrophobic surfaces in water. Adv. Colloid Interface Sci. 2001, 91, 391–436. [Google Scholar] [CrossRef]
- Ishida, N.; Matsuo, K.; Imamura, K.; Craig, V.S.J. Hydrophobic Attraction Measured between Asymmetric Hydrophobic Surfaces. Langmuir 2018, 34, 3588–3596. [Google Scholar] [CrossRef]
- Ishida, N.; Sakamoto, M.; Miyahara, M.; Higashitani, K. Attraction between Hydrophobic Surfaces with and without Gas Phase. Langmuir 2000, 16, 5681–5687. [Google Scholar] [CrossRef]
- Zhang, X.H.; Quinn, A.; Ducker, W.A. Nanobubbles at the Interface between Water and a Hydrophobic Solid. Langmuir 2008, 24, 4756–4764. [Google Scholar] [CrossRef]
- Sygusch, J.; Rudolph, M. A contribution to wettability and wetting characterisation of ultrafine particles with varying shape and degree of hydrophobization. Appl. Surf. Sci. 2021, 566, 150725. [Google Scholar] [CrossRef]
- Richardson, J.F.; Zaki, W.N. The sedimentation of a suspension of uniform spheres under conditions of viscous flow. Chem. Eng. Sci. 1954, 3, 65–73. [Google Scholar] [CrossRef]
- Michaels, A.S.; Bolger, J.C. Settling rates and sediment volumes of flocculated kaolin suspensions. Ind. Eng. Chem. Fundam. 1962, 1, 24–33. [Google Scholar] [CrossRef]
- Uttinger, M.J.; Walter, J.; Thajudeen, T.; Wawra, S.E.; Peukert, W. Brownian dynamics simulations of analytical ultracentrifugation experiments exhibiting hydrodynamic and thermodynamic non-ideality. Nanoscale 2017, 9, 17770–17780. [Google Scholar] [CrossRef]
- Anlauf, H. Wet Cake Filtration: Fundamentals, Equipment, and Strategies; Wiley-VCH: Weinheim, Germany, 2019. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rhein, F.; Ji, H.; Nirschl, H. Multidimensional Separation by Magnetic Seeded Filtration: Theoretical Study. Powders 2024, 3, 217-232. https://doi.org/10.3390/powders3020014
Rhein F, Ji H, Nirschl H. Multidimensional Separation by Magnetic Seeded Filtration: Theoretical Study. Powders. 2024; 3(2):217-232. https://doi.org/10.3390/powders3020014
Chicago/Turabian StyleRhein, Frank, Haoran Ji, and Hermann Nirschl. 2024. "Multidimensional Separation by Magnetic Seeded Filtration: Theoretical Study" Powders 3, no. 2: 217-232. https://doi.org/10.3390/powders3020014
APA StyleRhein, F., Ji, H., & Nirschl, H. (2024). Multidimensional Separation by Magnetic Seeded Filtration: Theoretical Study. Powders, 3(2), 217-232. https://doi.org/10.3390/powders3020014