Predictive and Learning Control in Engineering Applications
Share This Topical Collection
Editors
 Dr. Moad Kissai
Dr. Moad Kissai
Dr. Moad Kissai
E-Mail
Website
Collection Editor
Autonomous Systems and Robotics Lab, Computer Science and System Engineering Department (U2IS), École Nationale Supérieure de Techniques Avancées (ENSTA Paris), Institut Polytechnique de Paris (IP Paris), 828 Boulevard des Maréchaux, 91120 Palaiseau, France
Interests: H∞ control; gain scheduling; control allocation; vehicle dynamics; co-simulation; robust control; model predictive control; optimal control
Special Issues, Collections and Topics in MDPI journals
 Prof. Dr. Bruno Monsuez
Prof. Dr. Bruno Monsuez
Prof. Dr. Bruno Monsuez
E-Mail
Website
Collection Editor
Autonomous Systems and Robotics Lab, Computer Science and System Engineering Department (U2IS), École Nationale Supérieure de Techniques Avancées (ENSTA Paris), Institut Polytechnique de Paris (IP Paris), 828 Boulevard des Maréchaux, 91120 Palaiseau, France
Topical Collection Information
Dear Colleagues,
In many control design problems, a model-based approach is chosen. This approach has proven its effectiveness in several engineering applications as long as the dynamics involved are known and analytically describable. Nevertheless, even if the dynamics are uncertain, robust controllers can be designed to ensure the stability of the studied system in spite of the uncertainty. The problem is that classic robust control design suffers from conservatism, which reduces the performance of the controller.
Since the limitation comes from uncertainty, if the dynamics could be known precisely, the problem would be solved. Thanks to learning-based identification, the modeling of the dynamics can be improved. Once the modeling is improved, a predictive control could be applied to achieve an optimal solution.
This Topical Collection focuses on recent advances in the design, validation, and implementation of predictive and learning-based control strategies. This Topical Collection is not limited to a specific application, and all engineering applications are welcome.
Dr. Moad Kissai
Prof. Dr. Bruno Monsuez
Dr. Barys Shyrokau
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Electronics is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2400 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- predictive control
- learning-based identification
- learning-based control
- optimal control
- adaptive control
Published Papers (27 papers)
Open AccessFeature PaperArticle
LEVIOSA: Natural Language-Based Uncrewed Aerial Vehicle Trajectory Generation
by
Godwyll Aikins, Mawaba Pascal Dao, Koboyo Josias Moukpe, Thomas C. Eskridge and Kim-Doang Nguyen
Viewed by 412
Abstract
This paper presents LEVIOSA, a novel framework for text- and speech-based uncrewed aerial vehicle (UAV) trajectory generation. By leveraging multimodal large language models (LLMs) to interpret natural language commands, the system converts text and audio inputs into executable flight paths for UAV swarms.
[...] Read more.
This paper presents LEVIOSA, a novel framework for text- and speech-based uncrewed aerial vehicle (UAV) trajectory generation. By leveraging multimodal large language models (LLMs) to interpret natural language commands, the system converts text and audio inputs into executable flight paths for UAV swarms. The approach aims to simplify the complex task of multi-UAV trajectory generation, which has significant applications in fields such as search and rescue, agriculture, infrastructure inspection, and entertainment. The framework involves two key innovations: a multi-critic consensus mechanism to evaluate trajectory quality and a hierarchical prompt structuring for improved task execution. The innovations ensure fidelity to user goals. The framework integrates several multimodal LLMs for high-level planning, converting natural language inputs into 3D waypoints that guide UAV movements and per-UAV low-level controllers to control each UAV in executing its assigned 3D waypoint path based on the high-level plan. The methodology was tested on various trajectory types with promising accuracy, synchronization, and collision avoidance results. The findings pave the way for more intuitive human–robot interactions and advanced multi-UAV coordination.
Full article
►▼
Show Figures
Open AccessArticle
MPC-Based Dynamic Velocity Adaptation in Nonlinear Vehicle Systems: A Real-World Case Study
by
Georgiana-Sinziana Pauca and Constantin-Florin Caruntu
Viewed by 747
Abstract
Technological advancements have positively impacted the automotive industry, leading to the development of autonomous cars, which aim to minimize human intervention during driving, and thus reduce the likelihood of human error and accidents. These cars are distinguished by their advanced driving systems and
[...] Read more.
Technological advancements have positively impacted the automotive industry, leading to the development of autonomous cars, which aim to minimize human intervention during driving, and thus reduce the likelihood of human error and accidents. These cars are distinguished by their advanced driving systems and environmental benefits due to their integration of cutting-edge autonomous technology and electric powertrains. This combination of safety, efficiency, and sustainability positions autonomous vehicles as a transformational solution for modern transportation challenges. Optimizing vehicle speed is essential in the development of these vehicles, particularly in minimizing energy consumption. Thus, in this paper, a method to generate the maximum velocity profile of a vehicle on a real road, extracted using online mapping platforms while ensuring compliance with maximum legal speed limits, is proposed. A nonlinear model, closely aligned with real-world conditions, captures and describes vehicle dynamics. Further, a nonlinear model predictive control strategy is proposed for optimizing the vehicle’s performance and safety in dynamic driving conditions, yielding satisfactory results that demonstrate the effectiveness of the method.
Full article
►▼
Show Figures
Open AccessArticle
Augmenting Knowledge for Individual NVR Prediction in Different Spatial and Temporal Cross-Building Environments
by
Mintai Kim and Sungju Lee
Viewed by 579
Abstract
Natural ventilation is a critical method for reducing energy consumption for heating, cooling, and ventilating buildings. Recent research has focused on utilizing environmental IoT data from both inside and outside buildings for NVR prediction based on a deep learning model. To design an
[...] Read more.
Natural ventilation is a critical method for reducing energy consumption for heating, cooling, and ventilating buildings. Recent research has focused on utilizing environmental IoT data from both inside and outside buildings for NVR prediction based on a deep learning model. To design an accurate NVR prediction model while considering individual building environments, various knowledge-sharing methods can be applied, such as transfer learning and ensemble models for cross-building prediction. However, the characteristics of learning data and model parameters should be considered when applying transfer learning and ensemble models to predict NVR with different spatial and temporal domains. In this paper, we propose a way to design an NVR prediction model for a cross-building environment by normalizing the training data, selecting transfer learning layers that are well-suited to the data environment, and augmenting NVR knowledge via ensemble methods. Based on the experimental results, we confirm that the proposed knowledge-sharing deep learning approach, while considering the normalizing of training data, the selecting transfer learning layers, and augmenting the NVR knowledge approach, can improve the accuracy up to 11.8% in the two different offices and seasons.
Full article
►▼
Show Figures
Open AccessArticle
Neural Network Iterative Learning for SISO Non-Affine Control Systems
by
Christos Vlachos, Fotios Tolis, George C. Karras and Charalampos P. Bechlioulis
Viewed by 964
Abstract
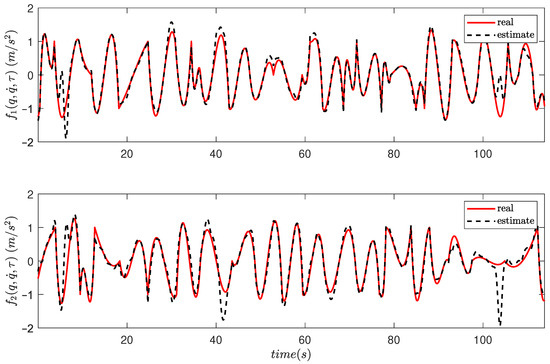
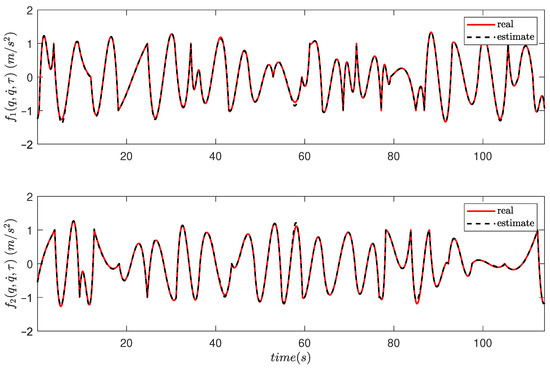
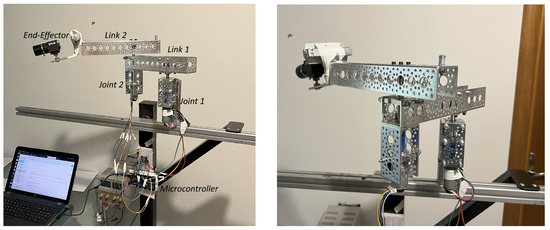
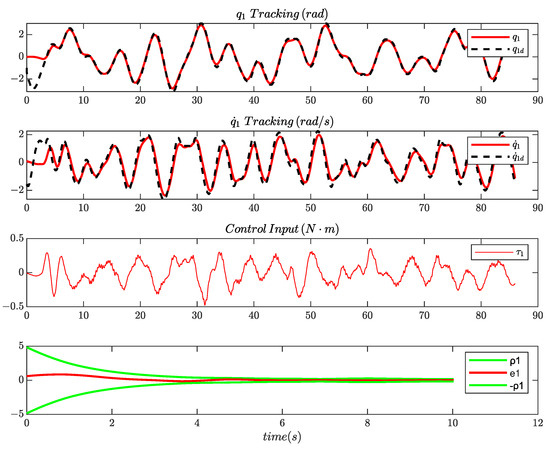
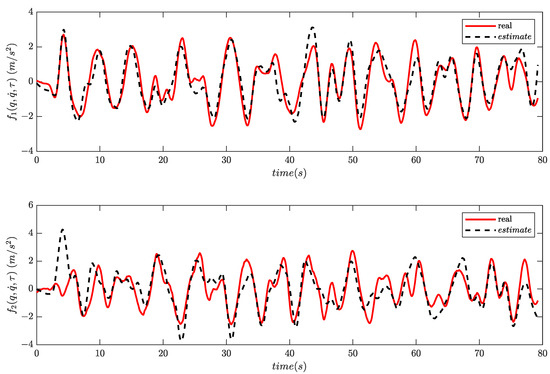
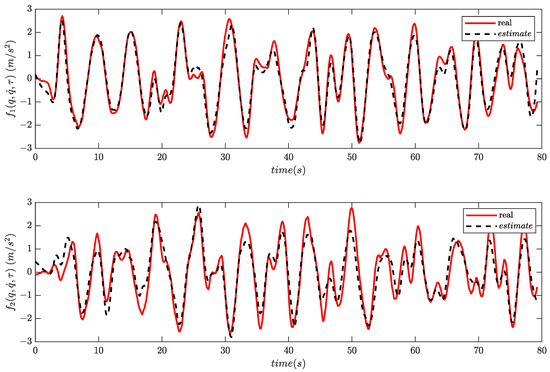
This work introduces an identification scheme capable of obtaining the unknown dynamics of a nonlinear plant process. The proposed method employs an iterative algorithm that prevents confinement to a sole trajectory by fitting a neural network over a series of trajectories that span
[...] Read more.
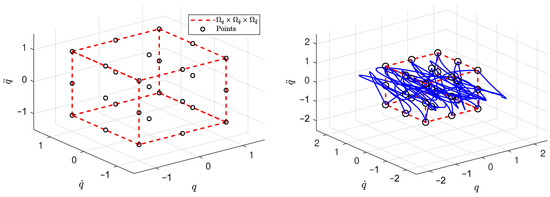
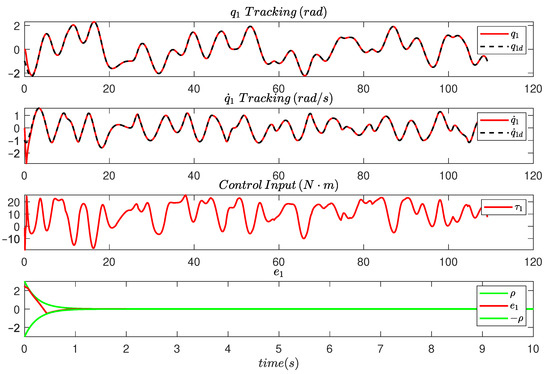
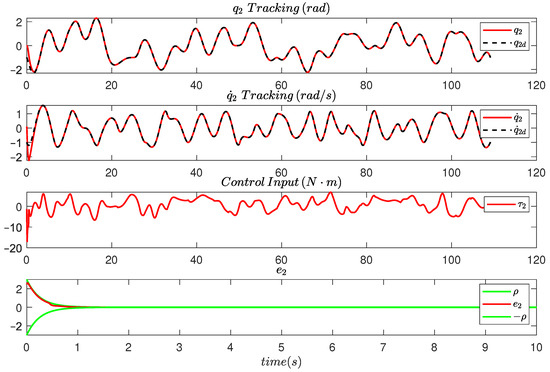
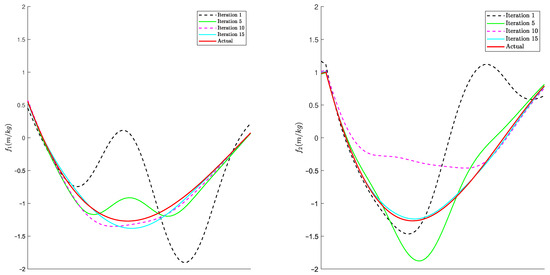
This work introduces an identification scheme capable of obtaining the unknown dynamics of a nonlinear plant process. The proposed method employs an iterative algorithm that prevents confinement to a sole trajectory by fitting a neural network over a series of trajectories that span the desired subset of the state space. At the core of our contributions lie the applicability of our method to open-loop unstable systems and a novel way of generating the system’s reference trajectories, which aim at sufficiently stimulating the underlying dynamics. Following this, the prescribed performance control (PPC) technique is utilized to ensure accurate tracking of the aforementioned trajectories. The effectiveness of our approach is showcased through successful identification of the dynamics of a two-degree of freedom (DOF) robotic manipulator in both a simulation study and a real-life experiment.
Full article
►▼
Show Figures
Open AccessFeature PaperArticle
Coalitional Distributed Model Predictive Control Strategy with Switching Topologies for Multi-Agent Systems
by
Anca Maxim, Ovidiu Pauca and Constantin F. Caruntu
Viewed by 1049
Abstract
Controlling multi-agent systems (MASs) has attracted increased interest within the control community. Since the control challenge consists of the fact that each agent has limited local capabilities, our adopted solution is tailored so that a group of such entities works together and shares
[...] Read more.
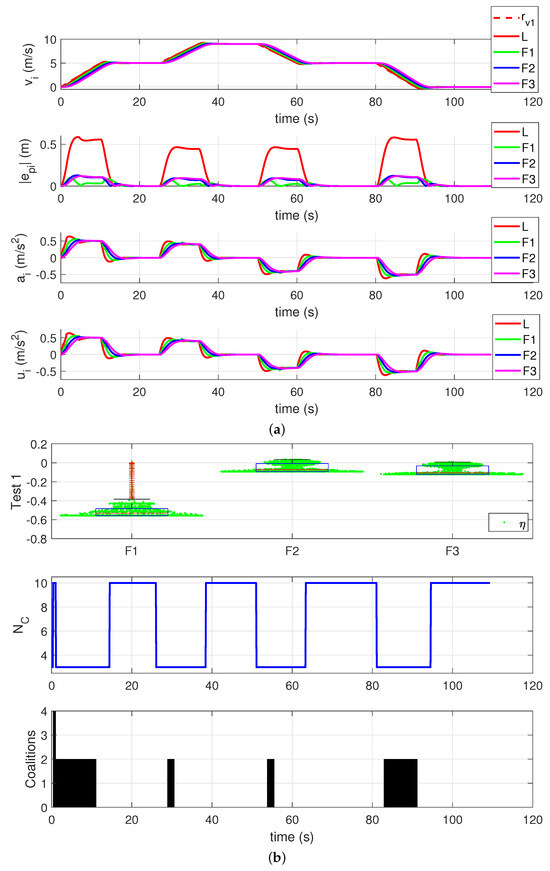
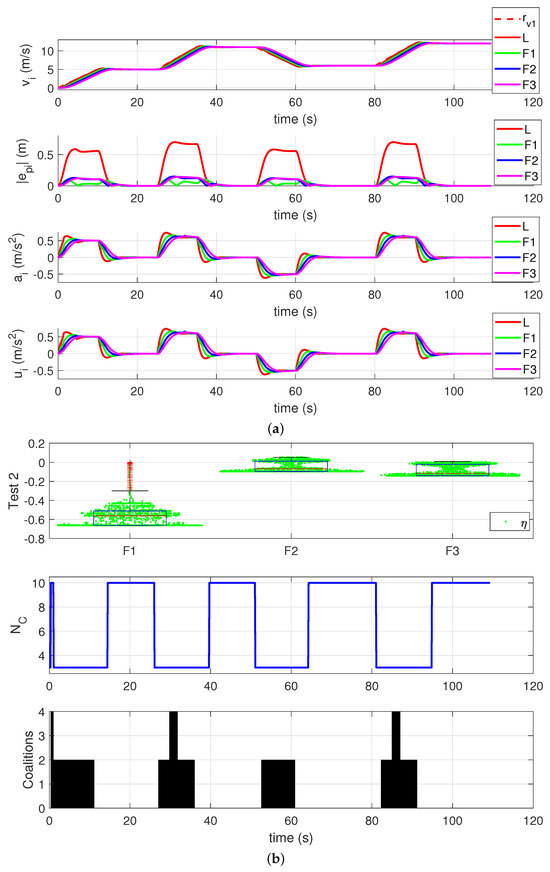
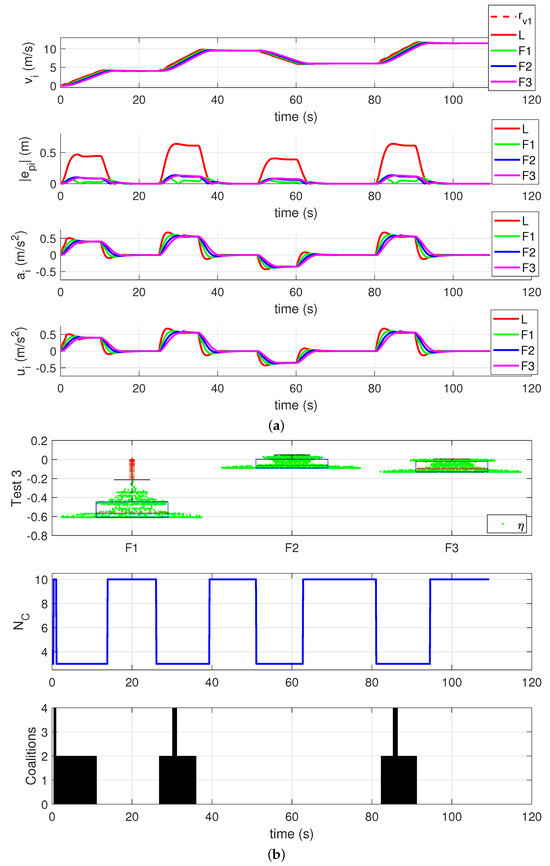
Controlling multi-agent systems (MASs) has attracted increased interest within the control community. Since the control challenge consists of the fact that each agent has limited local capabilities, our adopted solution is tailored so that a group of such entities works together and shares resources and information to fulfill a given task. In this work, we propose a coalitional control solution using the distributed model predictive control (DMPC) framework, suitable for a multi-agent system. The methodology has a switching mechanism that selects the best communication topology for the overall system. The proposed control algorithm was validated in simulation using a homogeneous vehicle platooning application with longitudinal dynamics. The available communication topologies were specifically tailored taking into account the information flow between adjacent vehicles. The obtained results show that when the platoon’s string stability is risked, the algorithm switches between different communication topologies. The resulting coalitions between vehicles ensure an increase in the overall stability of the entire system and prove the efficacy of our proposed methodology.
Full article
►▼
Show Figures
Open AccessArticle
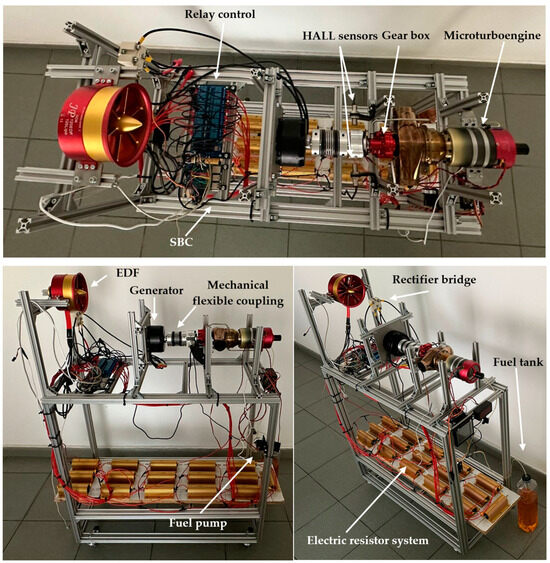
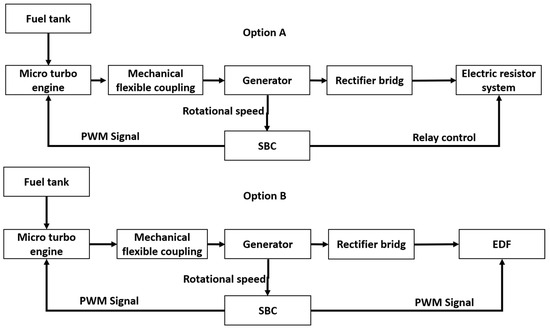
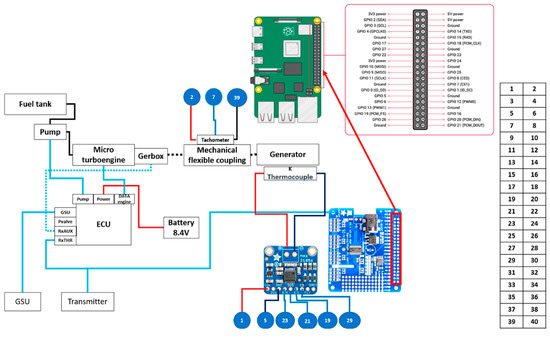
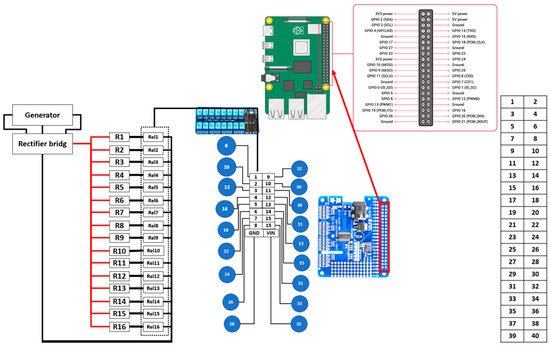
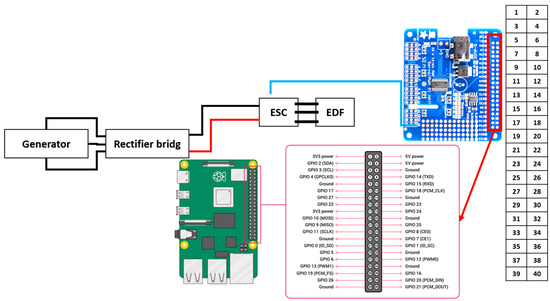
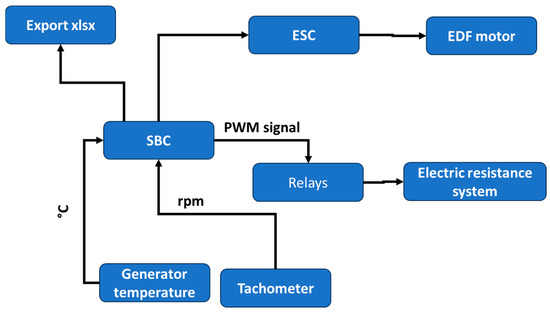
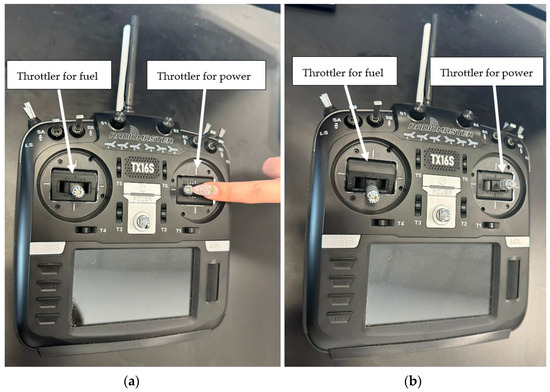
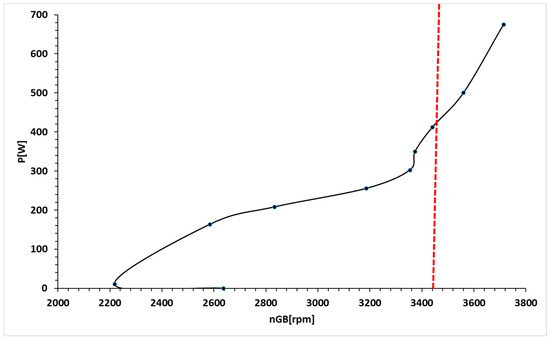
The Design and Development of a UAV’s Micro-Turbogenerator System and the Associated Control Testing Bench
by
Tiberius-Florian Frigioescu, Gabriel Petre Badea, Mădălin Dombrovschi, Mihaela Raluca Condruz, Daniel-Eugeniu Crunțeanu and Grigore Cican
Cited by 1 | Viewed by 1436
Abstract
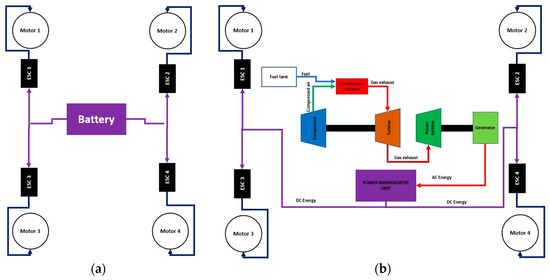
A study on the possibility of integrating a micro-turbogenerator system into a multi-rotor UAV platform was performed along with a performance evaluation of the result. This paper presents the design and development of a micro-turbogenerator system constructed from commercially available components and the
[...] Read more.
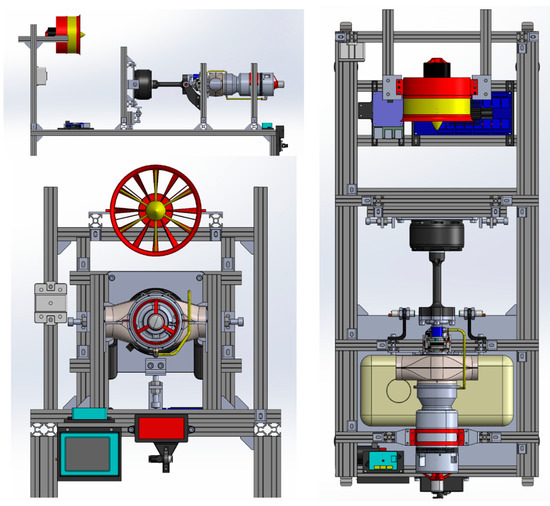
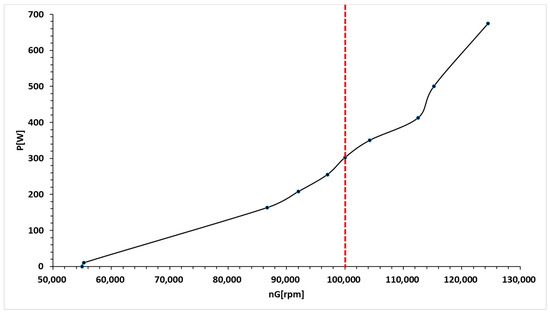
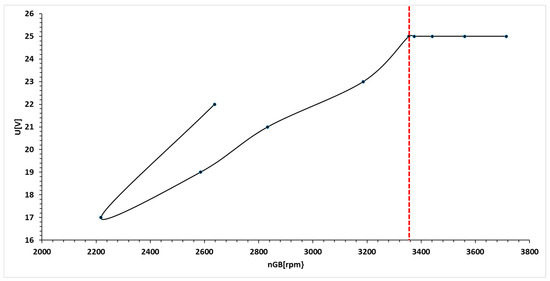
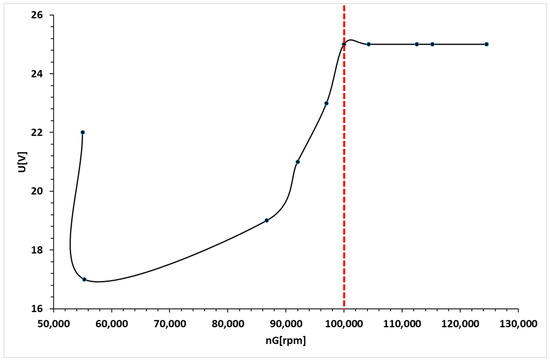
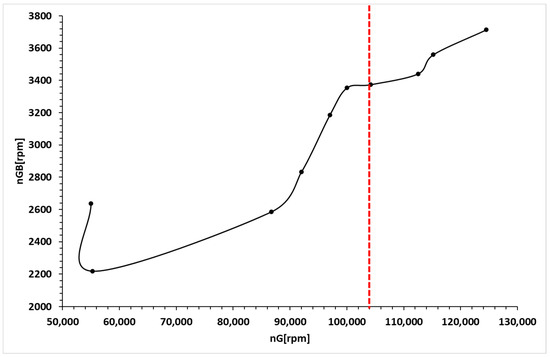
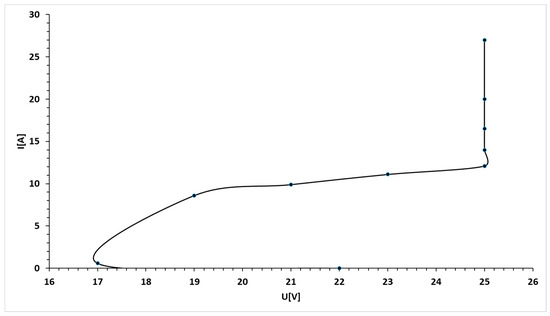
A study on the possibility of integrating a micro-turbogenerator system into a multi-rotor UAV platform was performed along with a performance evaluation of the result. This paper presents the design and development of a micro-turbogenerator system constructed from commercially available components and the associated test bench that was needed to validate the system. The goal of the micro-turbogenerator system was to replace the electrical power source (the batteries) of an experimental UAV. Substituting the electrical power source with a hybrid propulsion system has the potential to enhance the UAV’s endurance and functionality, rendering it more versatile and efficient. The hybrid propulsion system involves the use of a commercially available micro-gas turbine that propels an electric generator, supplying the required electrical power for the UAV’s electric propulsion system. Integrating this micro-turbogenerator system ensures a substantial increase in UAV endurance. The test bench was used to assess the performance of the micro-turbogenerator system and formulate a control law necessary for maintaining a balance between the power generated by the system and the power consumed by the UAV. The developed test bench yielded crucial data, including electric power, generated voltage, generator speed, and power consumption (simulating the UAV in this case). During the testing campaign, the variation in the main physical quantities involved in the command and control of the hybrid propulsion system was registered and analyzed. A total power of 700 W was obtained during the tests, which is the maximum that can be registered for maintaining a power of 25 V.
Full article
►▼
Show Figures
Open AccessArticle
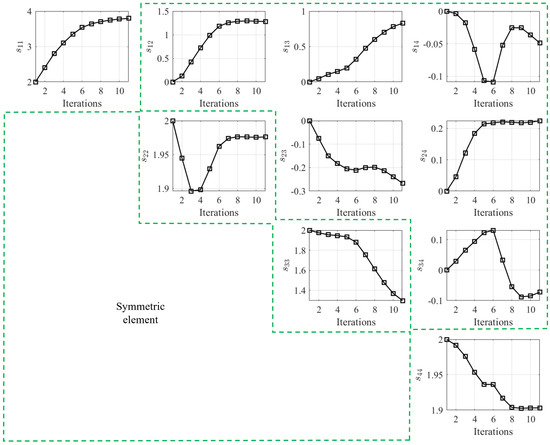
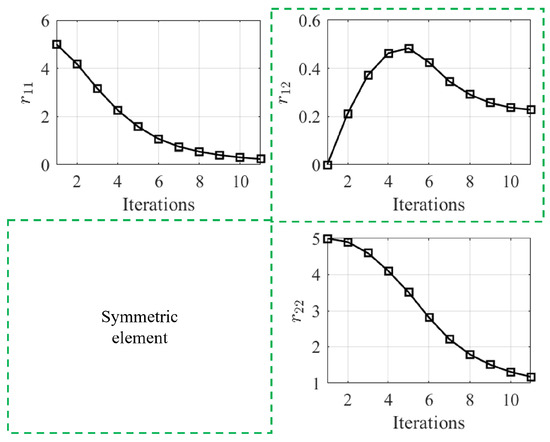
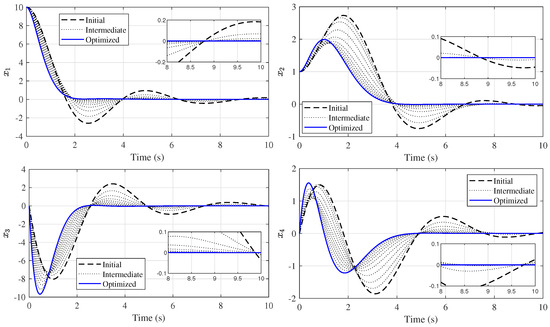
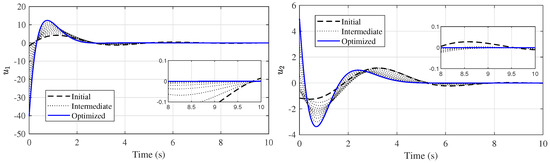
Optimization of Weight Matrices for the Linear Quadratic Regulator Problem Using Algebraic Closed-Form Solutions
by
Daegyun Choi, Donghoon Kim and James D. Turner
Cited by 1 | Viewed by 1131
Abstract
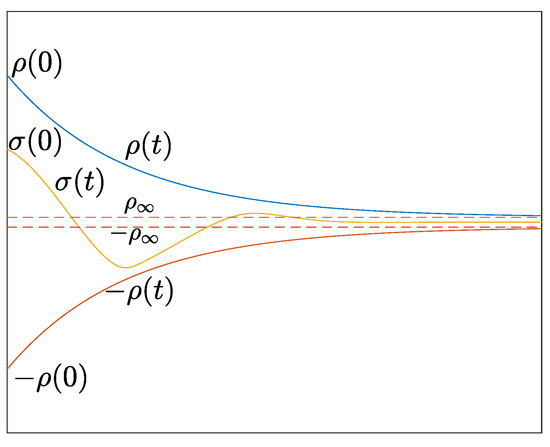
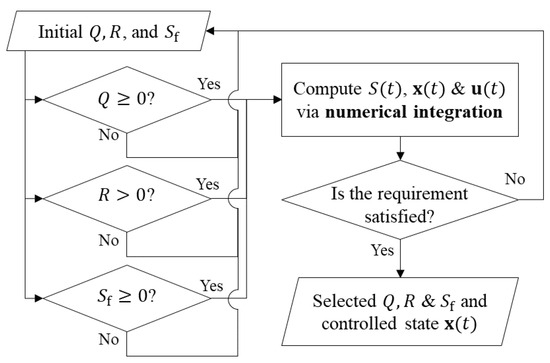
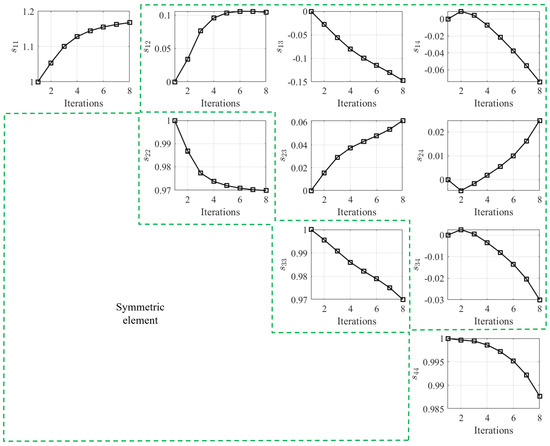
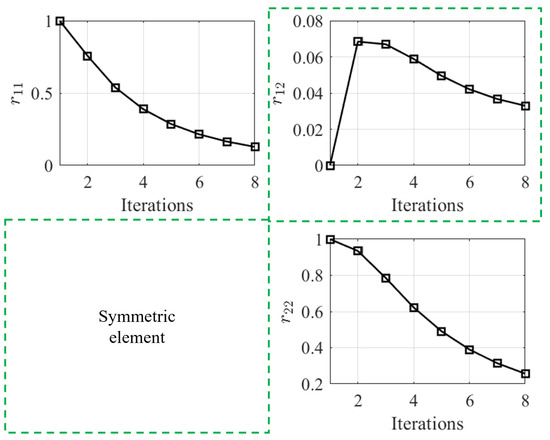
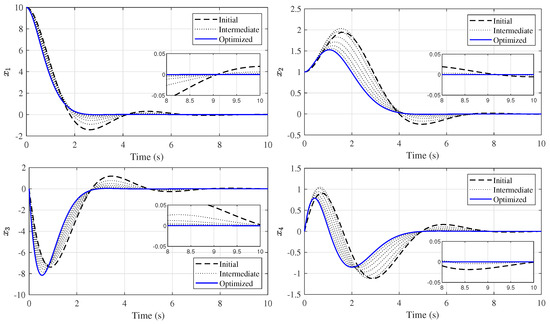
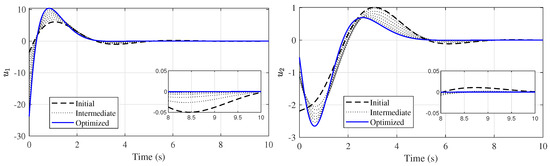
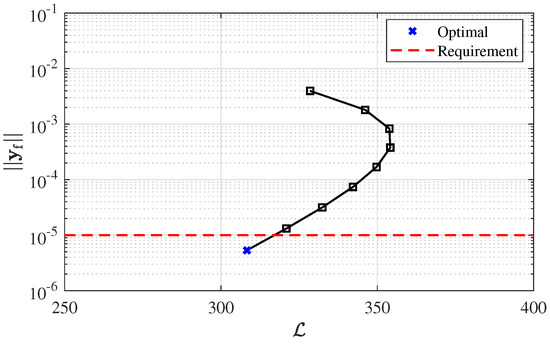
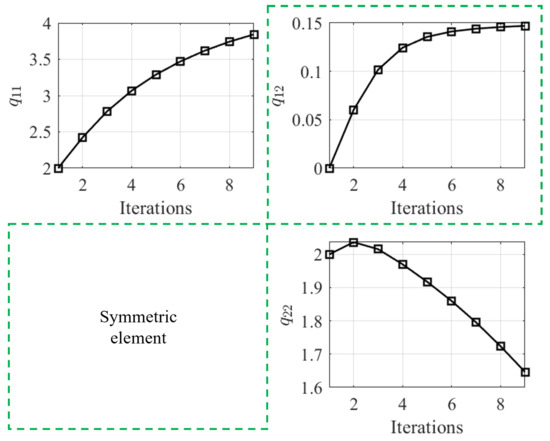
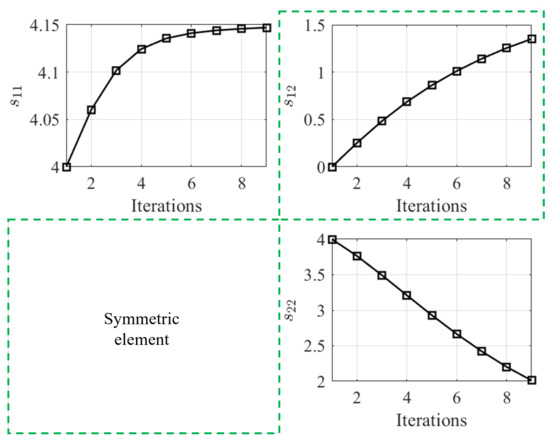
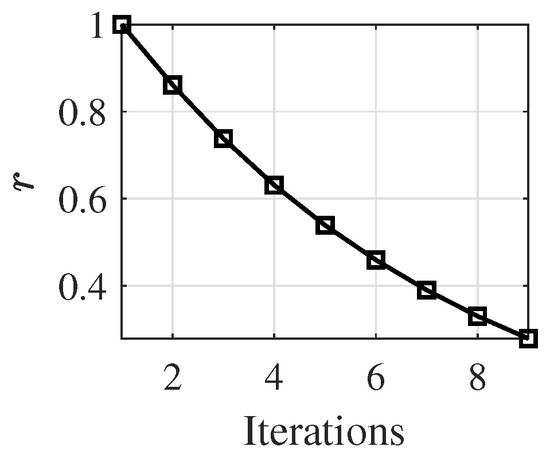
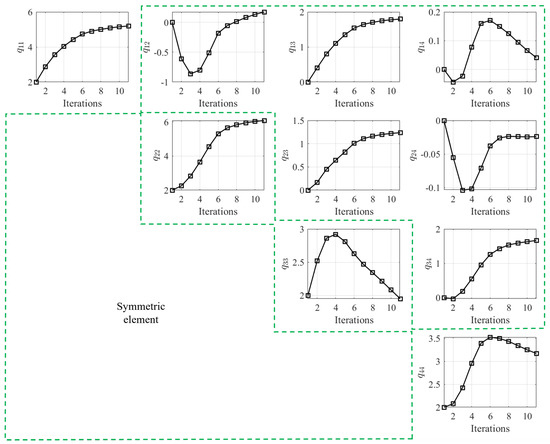
This work proposes an analytical gradient-based optimization approach to determine the optimal weight matrices that make the state and control input at the final time close to zero for the linear quadratic regulator problem. Most existing methodologies focused on regulating the diagonal elements
[...] Read more.
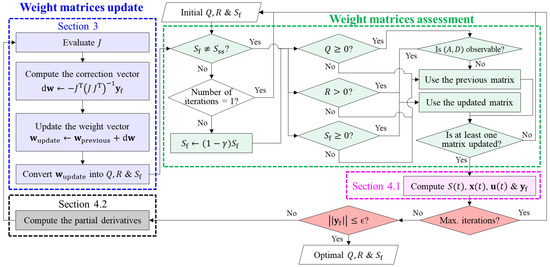
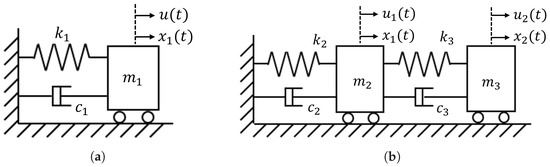
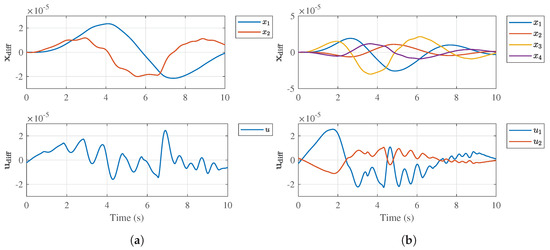
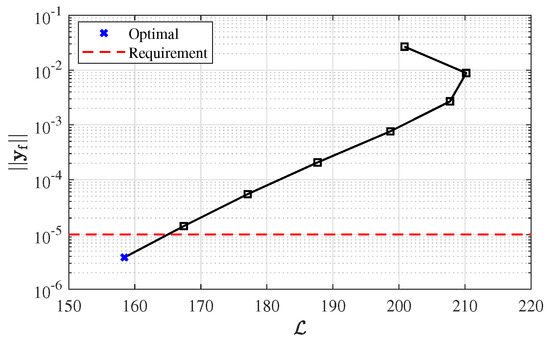
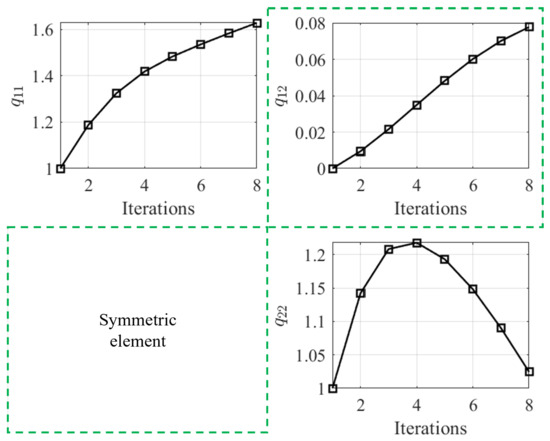
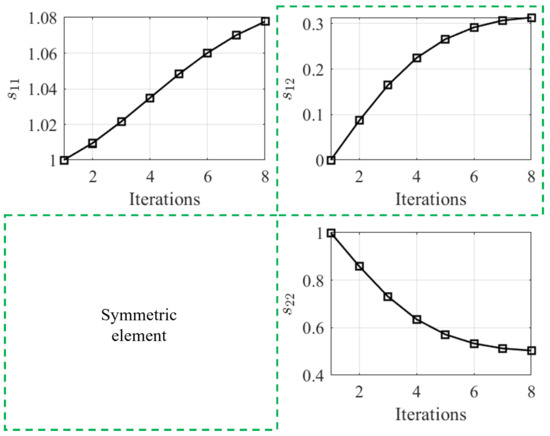
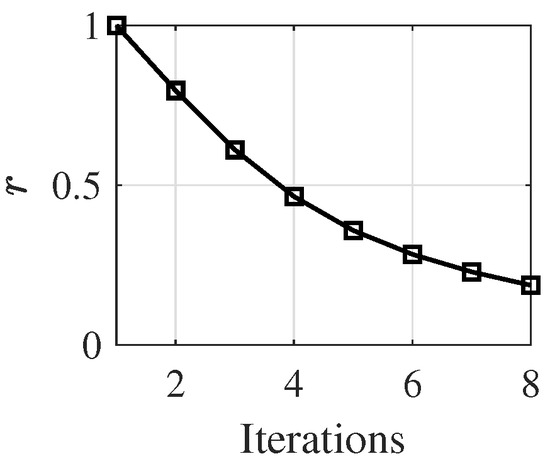
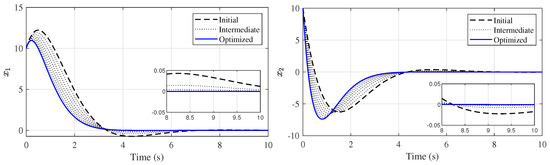
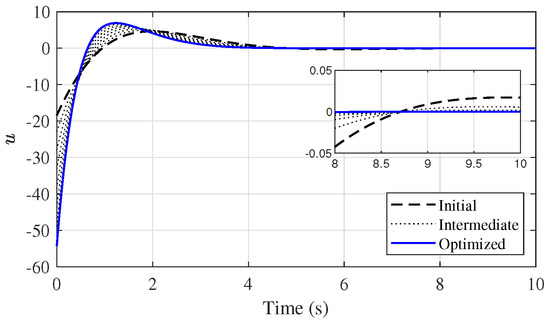
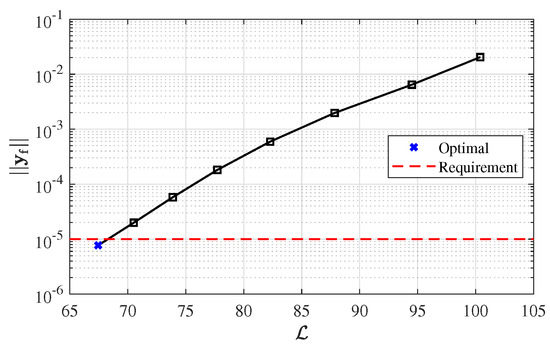
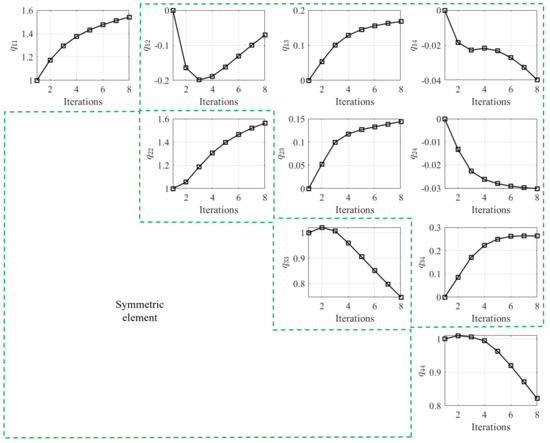
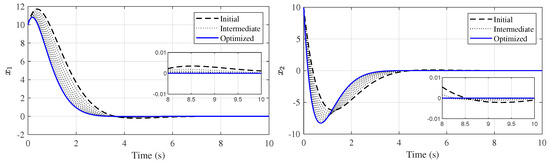
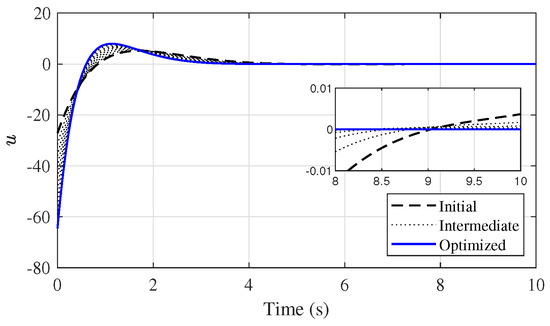
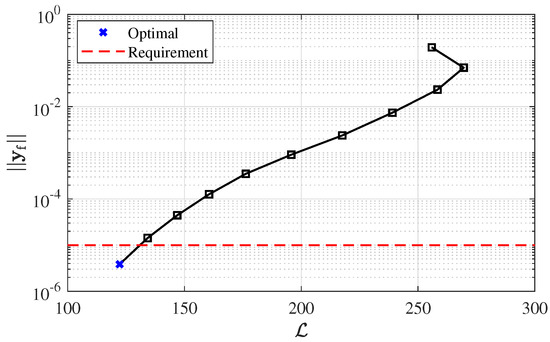
This work proposes an analytical gradient-based optimization approach to determine the optimal weight matrices that make the state and control input at the final time close to zero for the linear quadratic regulator problem. Most existing methodologies focused on regulating the diagonal elements using only bio-inspired approaches or analytical approaches. The method proposed, contrarily, optimizes both diagonal and off-diagonal matrix elements based on the gradient. Moreover, by introducing a new variable composed of the steady-state and time-varying terms for the Riccati matrix and using the coordinate transformation for the state, one develops algebraic equationsbased closed-form solutions to generate the required states and numerical partial derivatives for an optimization strategy that does not require the computationally intensive numerical integration process. The authors test the algorithm with one- and two-degrees-of-freedom linear plant models, and it yields the weight matrices that successfully satisfy the pre-defined requirement, which is the norm of the augmented states less than 10
−5. The results suggest the broad applicability of the proposed algorithm in science and engineering.
Full article
►▼
Show Figures
Open AccessArticle
Slip Risk Prediction Using Intelligent Insoles and a Slip Simulator
by
Shuo Xu, Md Javed Imtiaze Khan, Meysam Khaleghian and Anahita Emami
Viewed by 1139
Abstract
Slip and fall accidents are the leading cause of injuries for all ages, and for fatal injuries in adults over 65 years. Various factors, such as floor surface conditions and contaminants, shoe tread patterns, and gait behavior, affect the slip risk. Moreover, the
[...] Read more.
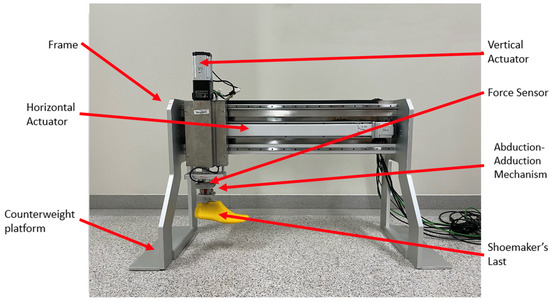
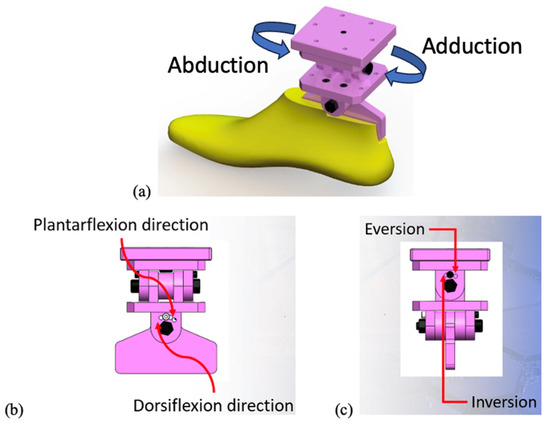
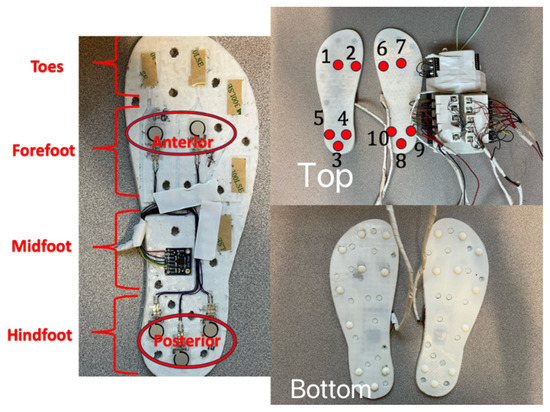
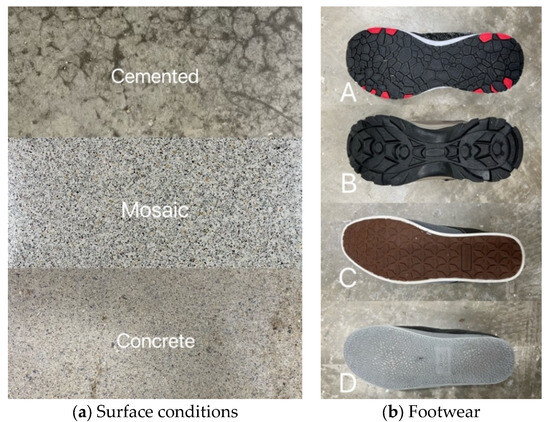
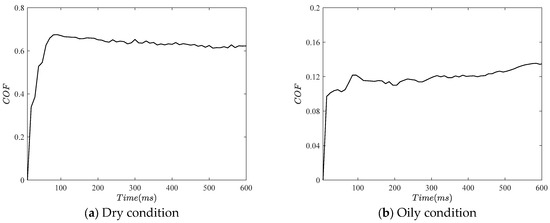
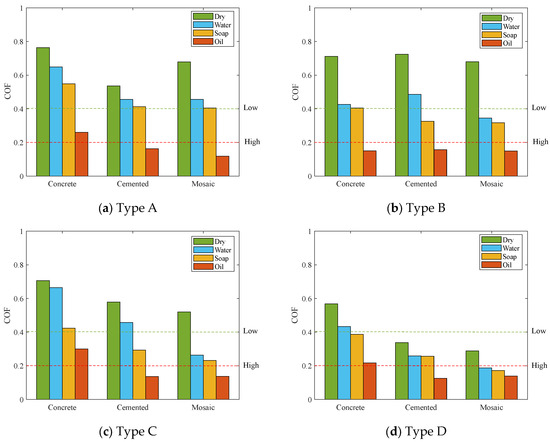
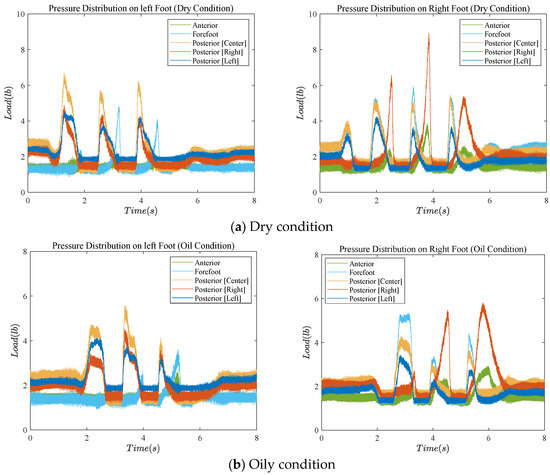
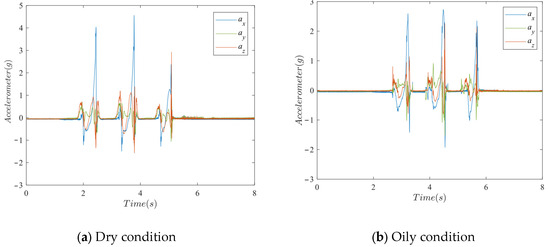
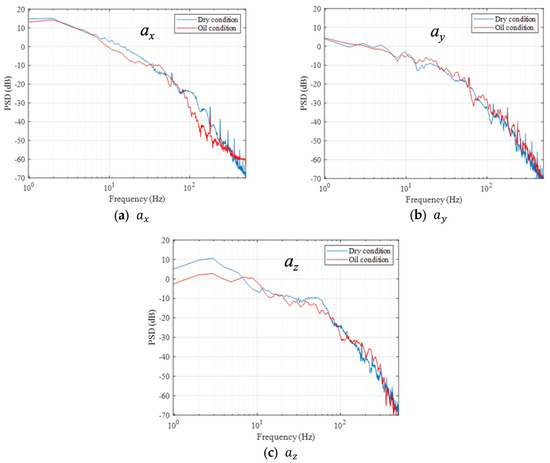
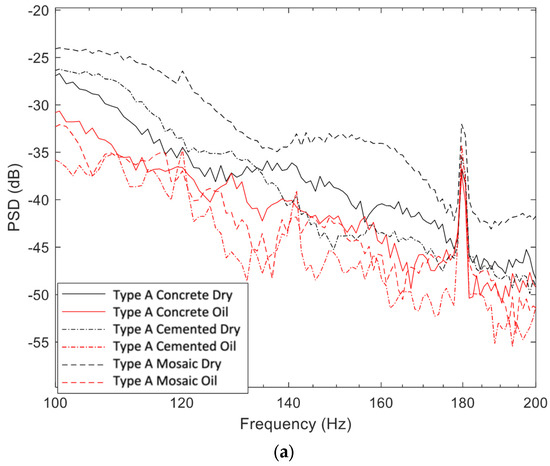
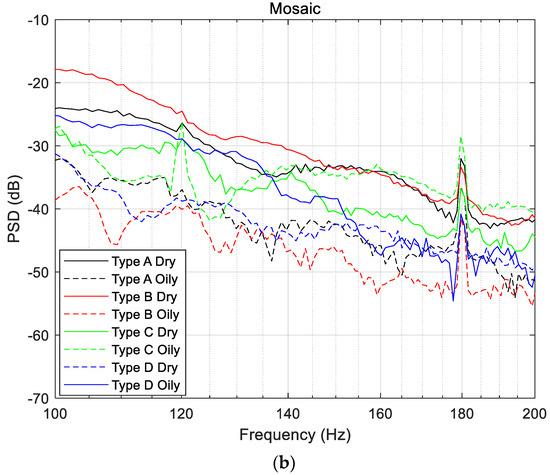
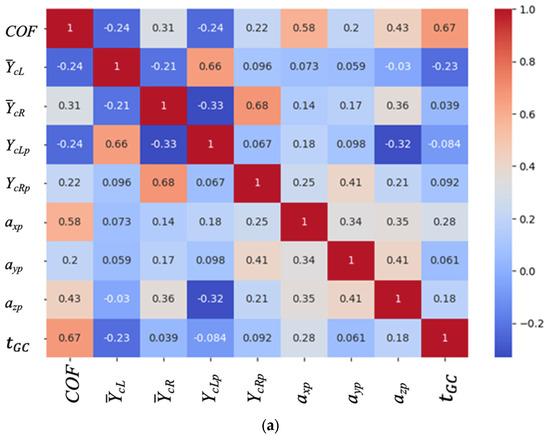
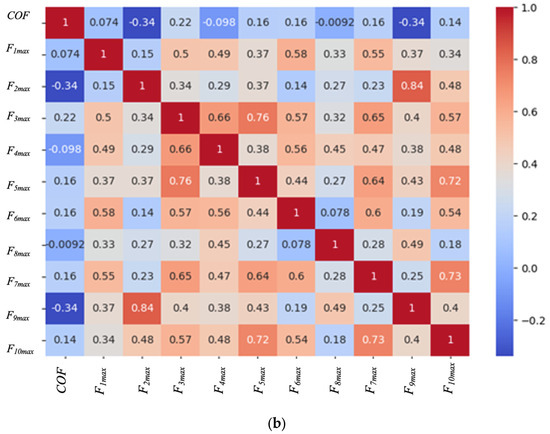
Slip and fall accidents are the leading cause of injuries for all ages, and for fatal injuries in adults over 65 years. Various factors, such as floor surface conditions and contaminants, shoe tread patterns, and gait behavior, affect the slip risk. Moreover, the friction between the shoe outsoles and the floor continuously changes as their surfaces undergo normal wear over time. However, continuous assessment of slip resistance is very challenging with conventional measurement techniques. This study addresses this challenge by introducing a novel approach that combines sensor fusion technology and machine learning techniques to create intelligent insoles designed for fall risk prediction. In addition, a state-of-the-art slip simulator, capable of mimicking the foot’s motion during a slip, was developed and utilized for the assessment of slipperiness between various shoes and floor surfaces. Data acquisition involved the collection of pressure data and three-axial accelerations using instrumented shoe insoles, complemented by friction coefficient measurements via the slip simulator. The collected dataset includes four types of shoes, three floor surfaces, and four surface conditions, including dry, wet, soapy, and oily. After preprocessing of the collected dataset, the simulator was used to train five different machine learning algorithms for slip risk classification. The trained algorithms provided promising results for slip risk prediction for different conditions, offering the potential to be employed in real-time slip risk prediction and safety enhancement.
Full article
►▼
Show Figures
Open AccessArticle
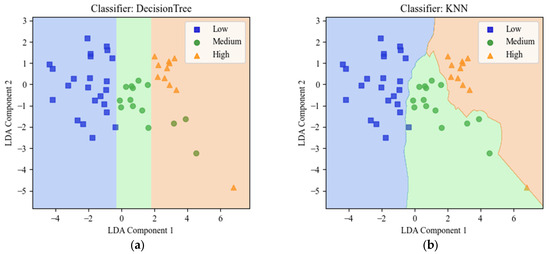
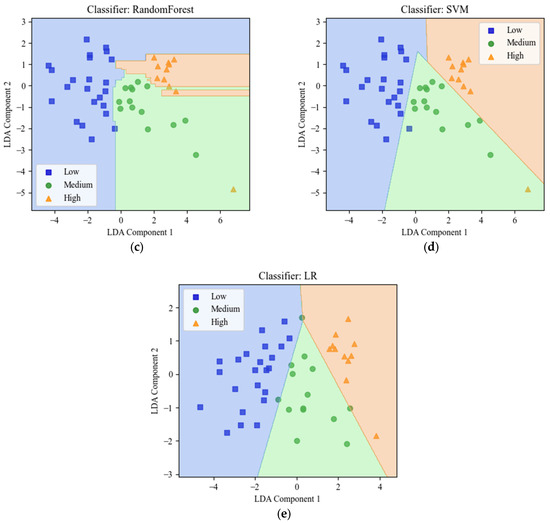
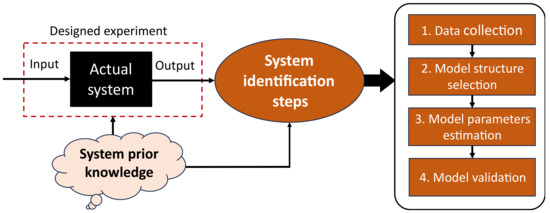
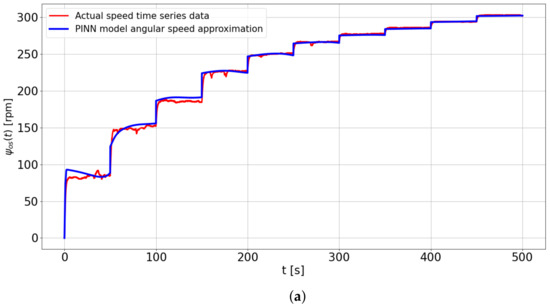
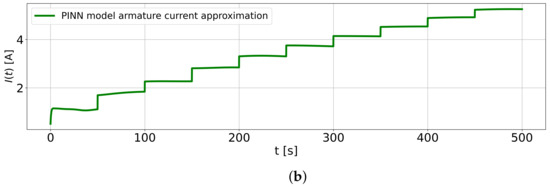
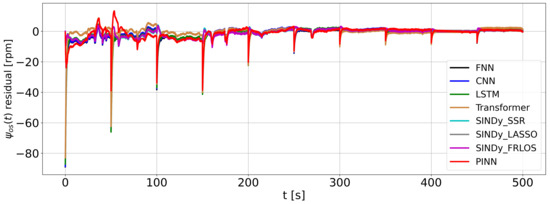
Time-Series Machine Learning Techniques for Modeling and Identification of Mechatronic Systems with Friction: A Review and Real Application
by
Samuel Ayankoso and Paweł Olejnik
Cited by 6 | Viewed by 3336
Abstract
Developing accurate dynamic models for various systems is crucial for optimization, control, fault diagnosis, and prognosis. Recent advancements in information technologies and computing platforms enable the acquisition of input–output data from dynamical systems, resulting in a shift from physics-based methods to data-driven techniques
[...] Read more.
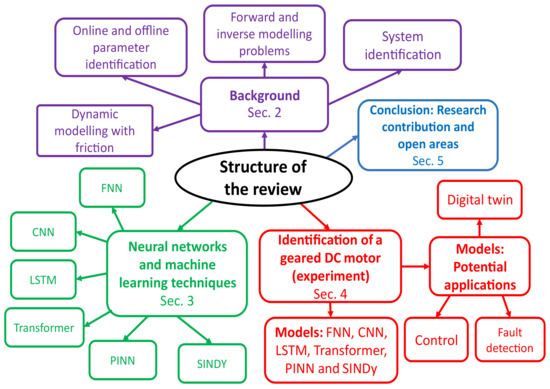
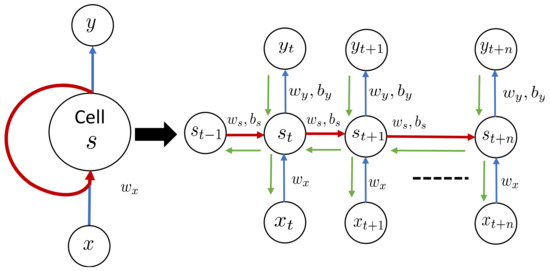
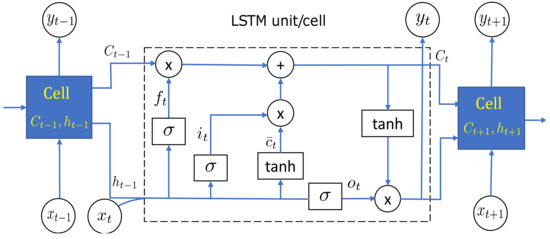
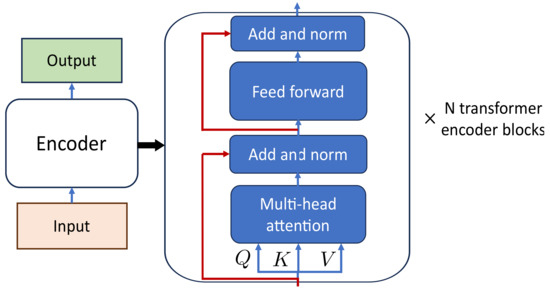
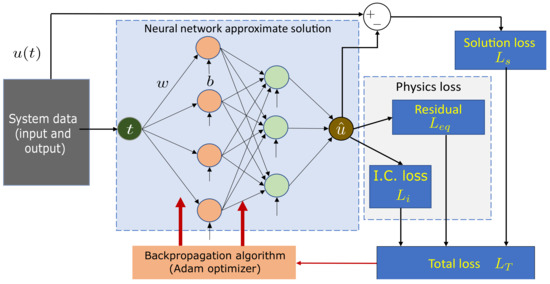
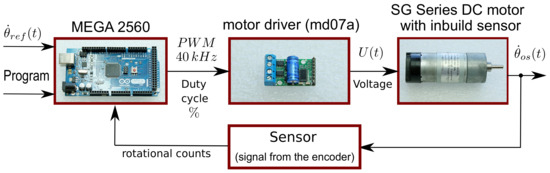
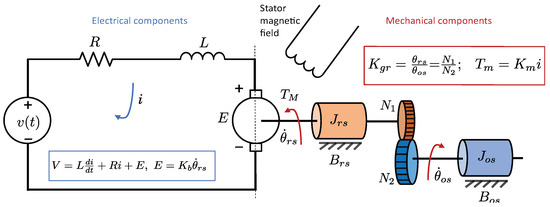
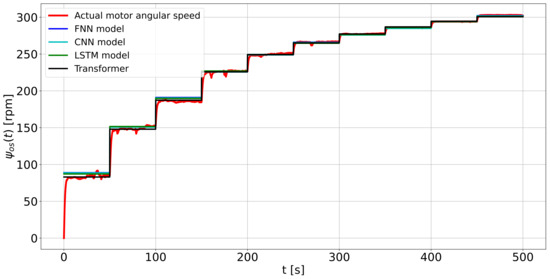
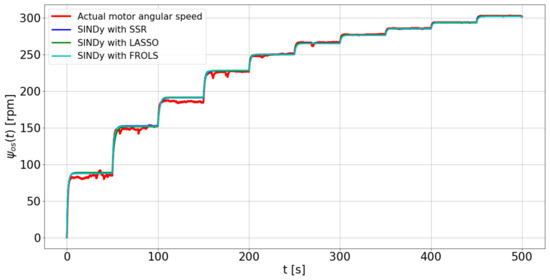
Developing accurate dynamic models for various systems is crucial for optimization, control, fault diagnosis, and prognosis. Recent advancements in information technologies and computing platforms enable the acquisition of input–output data from dynamical systems, resulting in a shift from physics-based methods to data-driven techniques in science and engineering. This review examines different data-driven modeling approaches applied to the identification of mechanical and electronic systems. The approaches encompass various neural networks (NNs), like the feedforward neural network (FNN), convolutional neural network (CNN), long short-term memory (LSTM), transformer, and emerging machine learning (ML) techniques, such as the physics-informed neural network (PINN) and sparse identification of nonlinear dynamics (SINDy). The main focus is placed on applying these techniques to real-world problems. A real application is presented to demonstrate the effectiveness of different machine learning techniques, namely, FNN, CNN, LSTM, transformer, SINDy, and PINN, in data-driven modeling and the identification of a geared DC motor. The results show that the considered ML techniques (traditional and state-of-the-art methods) perform well in predicting the behavior of such a classic dynamical system. Furthermore, SINDy and PINN models stand out for their interpretability compared to the other data-driven models examined. Our findings explicitly show the satisfactory predictive performance of six different ML models while also highlighting their pros and cons, such as interpretability and computational complexity, using a real-world case study. The developed models have various applications and potential research areas are discussed.
Full article
►▼
Show Figures
Open AccessArticle
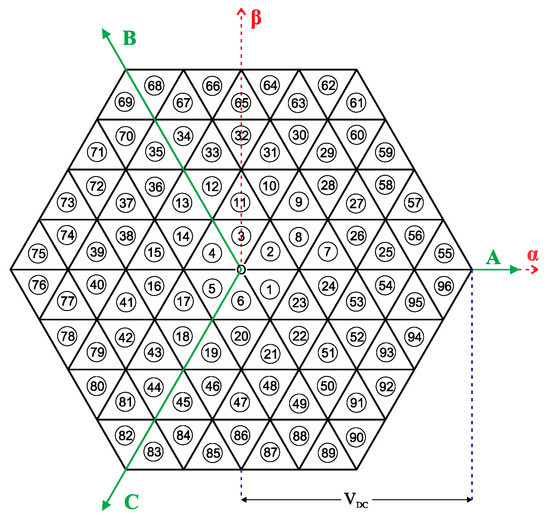
A Predictive Current Control Strategy for a Medium-Voltage Open-End Winding Machine Drive
by
Patricio Cataldo, Werner Jara, Javier Riedemann, Cristian Pesce, Iván Andrade and Rubén Pena
Cited by 3 | Viewed by 1829
Abstract
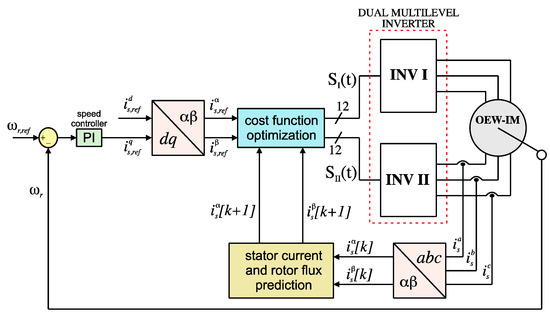
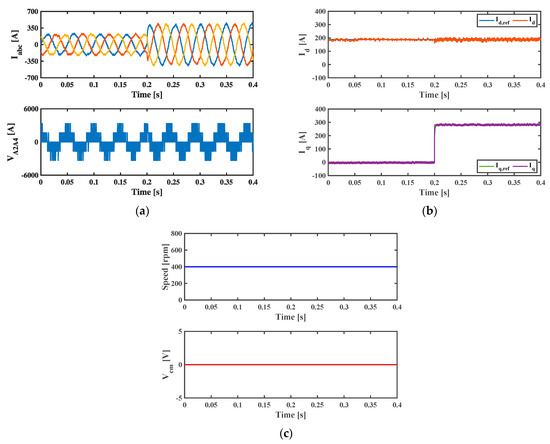
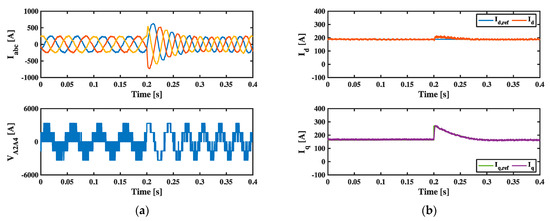
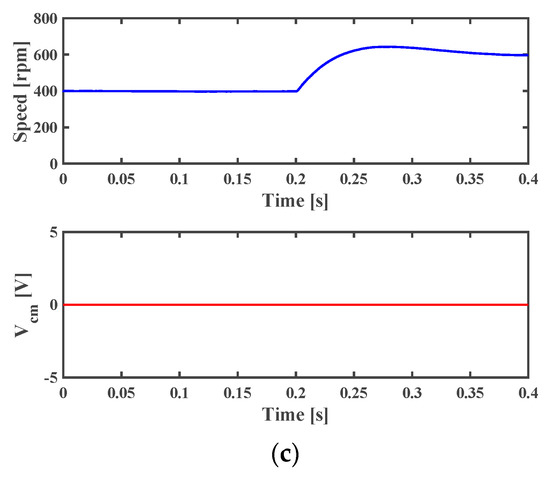
This paper presents a medium-voltage drive based on an open-end winding induction machine supplied by a multilevel power converter topology. The power converter consists of cascaded two-level three-phase voltage source inverters (VSI) connected to each side of the machine windings and each VSI
[...] Read more.
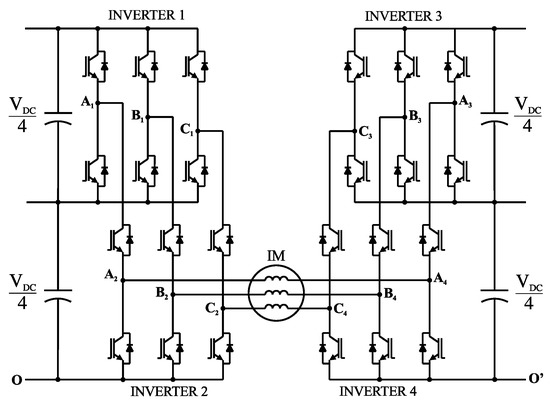
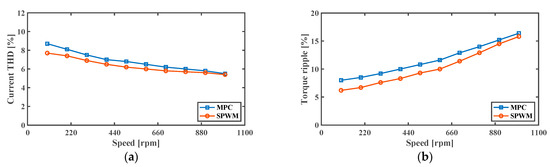
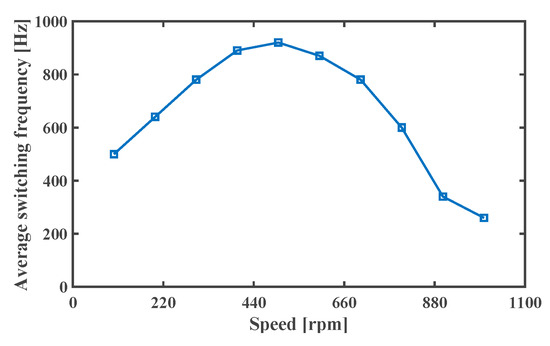
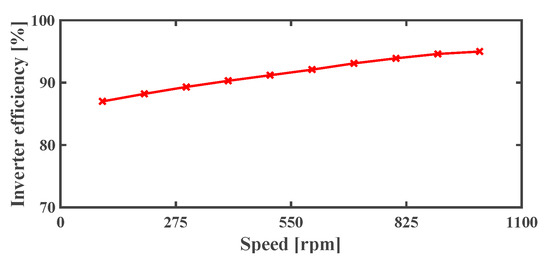
This paper presents a medium-voltage drive based on an open-end winding induction machine supplied by a multilevel power converter topology. The power converter consists of cascaded two-level three-phase voltage source inverters (VSI) connected to each side of the machine windings and each VSI is fed by an isolated DC supply. The topology has been previously reported in the literature as a sinusoidal pulse-width modulation operating in an open loop. In this work, a closed-loop model predictive control (MPC) strategy is proposed. MPC offers a much simpler method to control the power switches of the inverter compared to complex modulation strategies that are typically used in multilevel converters. Moreover, the advantage of reducing the common-mode voltage offered by the open-end winding configuration is fully exploited in this work. Simulation results are presented to validate the performance of the proposed topology and control method.
Full article
►▼
Show Figures
Open AccessArticle
Clarifying Optimum Setting Temperatures for In-Flight Personal Air Conditioning System Considering Individual Thermal Sensitivity Characteristics
by
Yuna Matsumoto, Manami Kanamaru, Phan Xuan Tan and Eiji Kamioka
Viewed by 1825
Abstract
The number of people who use airplanes has increased year by year. However, most passengers have a feeling of discomfort during a long-distance flight. One of the factors is the lack of temperature control in the cabin. If air conditioning control can be
[...] Read more.
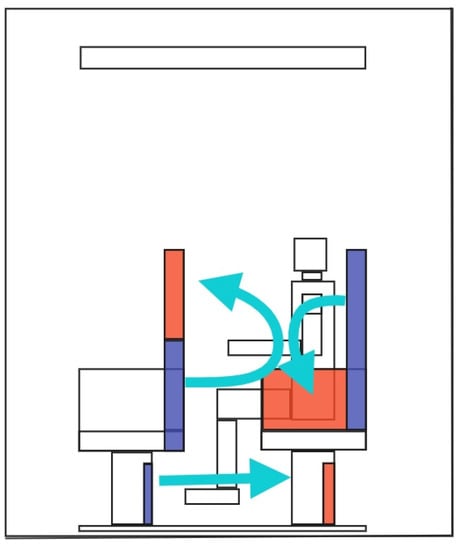
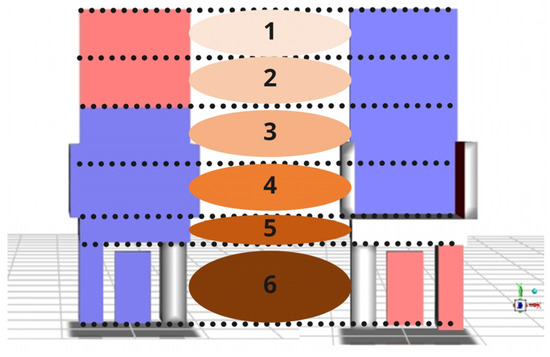
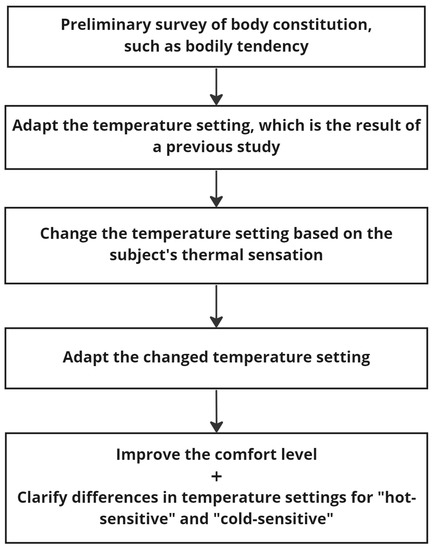
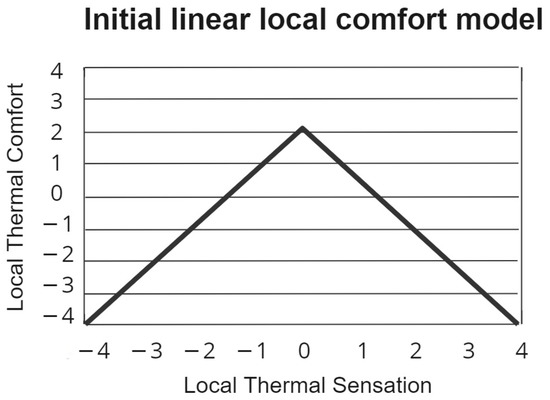
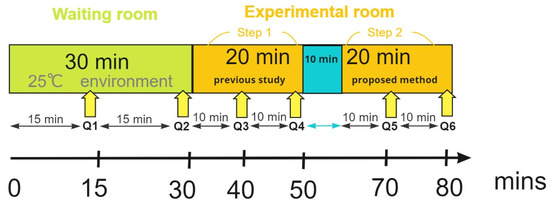
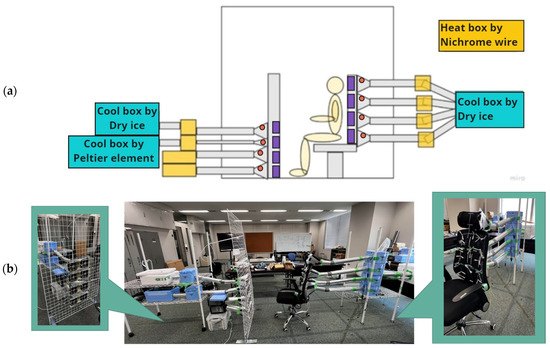
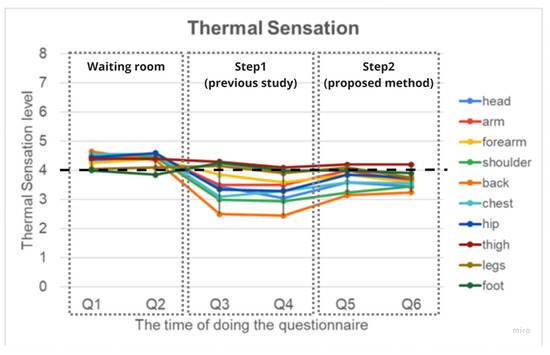
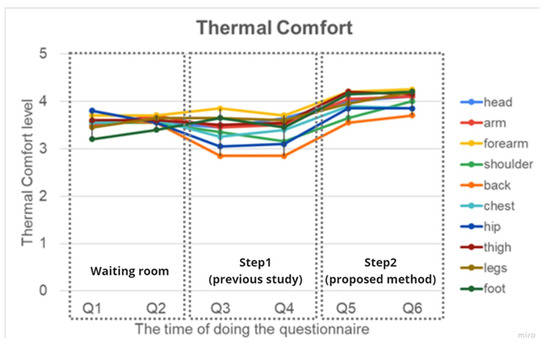
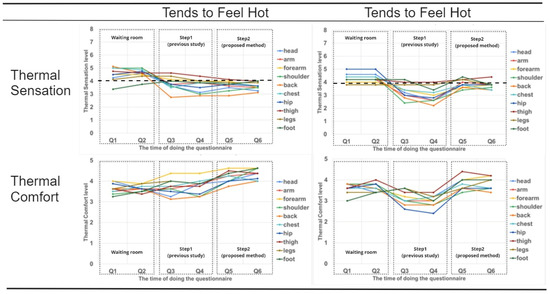
The number of people who use airplanes has increased year by year. However, most passengers have a feeling of discomfort during a long-distance flight. One of the factors is the lack of temperature control in the cabin. If air conditioning control can be adjusted to each passenger’s thermal sensation, the whole comfort in the cabin would be improved. Therefore, a personal air conditioning control method is required for airplanes. In order to implement personal air conditioning adapted to individual thermal sensation, this study proposes a seat-type air conditioning system that adjusts the temperature to each part of the body and aims to clarify the appropriate temperature setting in consideration of individual thermal sensation. As a result, the appropriate degree of temperature setting change was clarified based on the thermal sensation index. It was found that changing the temperature setting by 2.5 °C per scale of the thermal sensation improved the passenger’s comfort. Furthermore, people who tend to feel cold were found to be more sensitive to temperature changes. It is concluded that personalized air conditioning is possible based on individual thermal sensitivity characteristics. For prospects, it is desirable to study a system that automatically predicts the thermal sensation taking into account individual thermal sensitivity characteristics.
Full article
►▼
Show Figures
Open AccessArticle
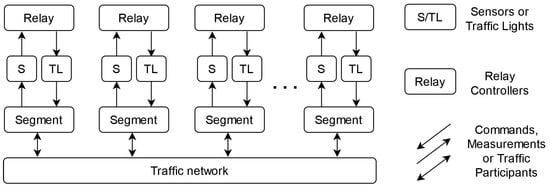
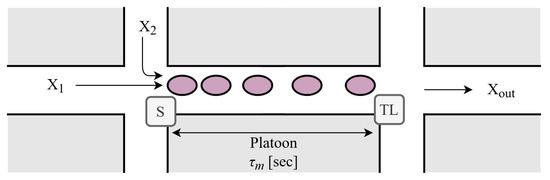
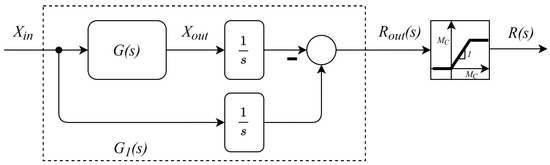
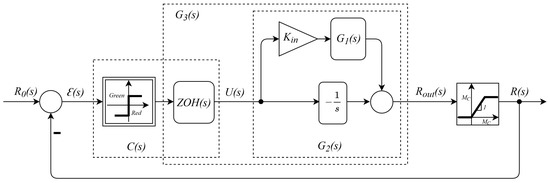
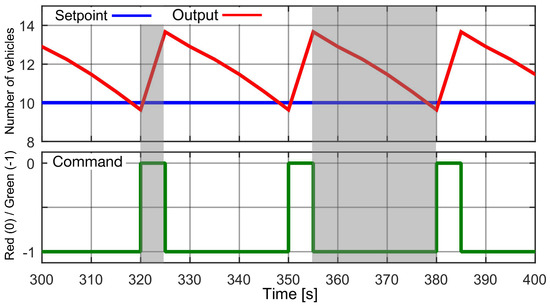
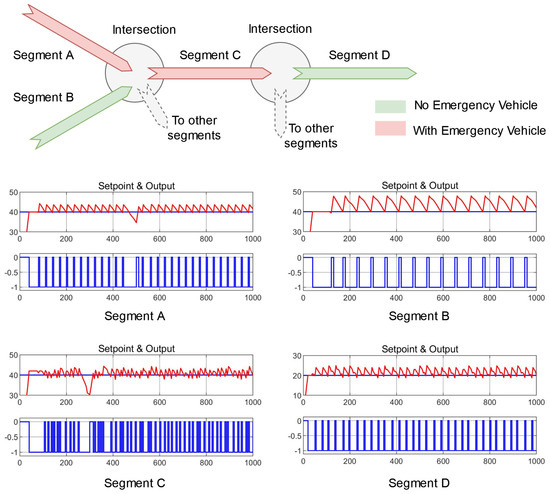
Stability Analysis for Single-Lane Traffic with a Relay Controller in a Closed Loop
by
Monica Patrascu and Vlad Constantinescu
Cited by 1 | Viewed by 1981
Abstract
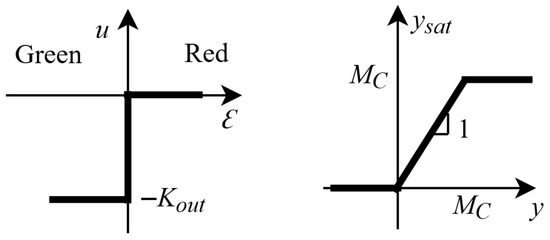
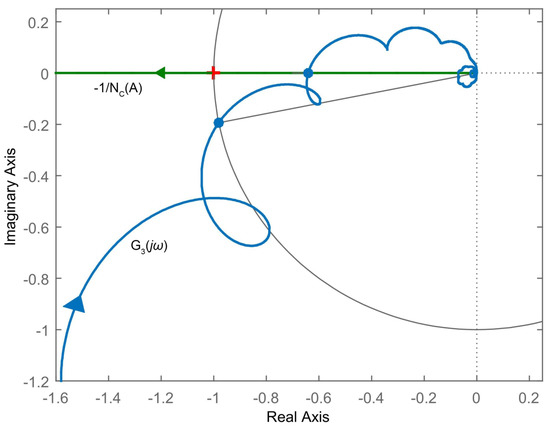
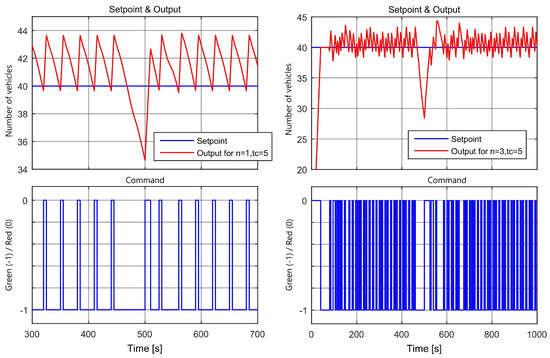
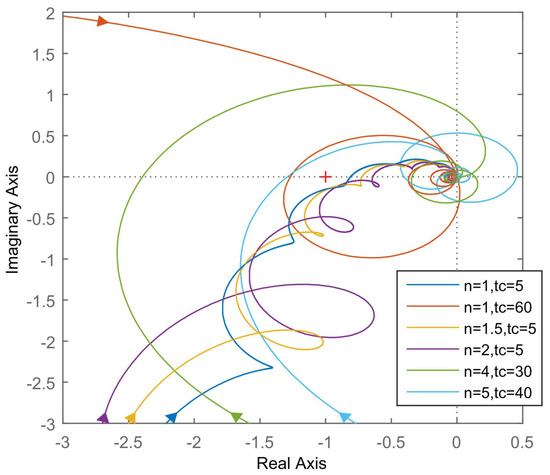
Rule-based relay controllers are common in single-lane urban traffic control systems and introduce significant nonlinearity. In this paper, we analyze the closed-loop stability for a traffic process with a relay controller and negative feedback, with respect to several time delays present in the
[...] Read more.
Rule-based relay controllers are common in single-lane urban traffic control systems and introduce significant nonlinearity. In this paper, we analyze the closed-loop stability for a traffic process with a relay controller and negative feedback, with respect to several time delays present in the plant. First, we derive models for the road segment and the controller. Second, we investigate the system stability based on describing the function analysis. Finally, we present the numerical results.
Full article
►▼
Show Figures
Open AccessArticle
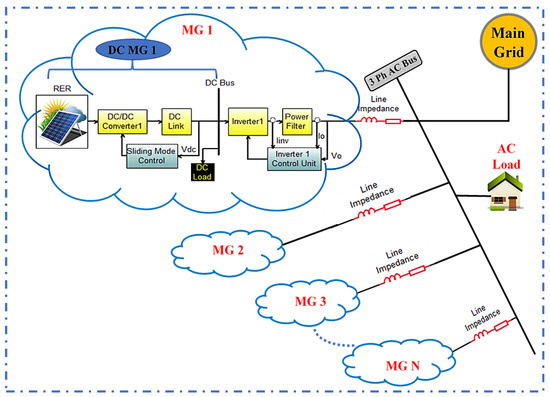
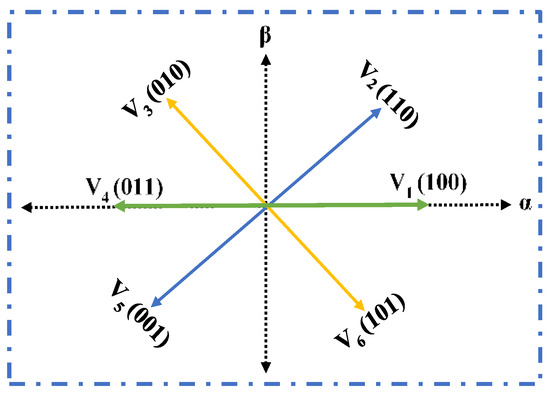
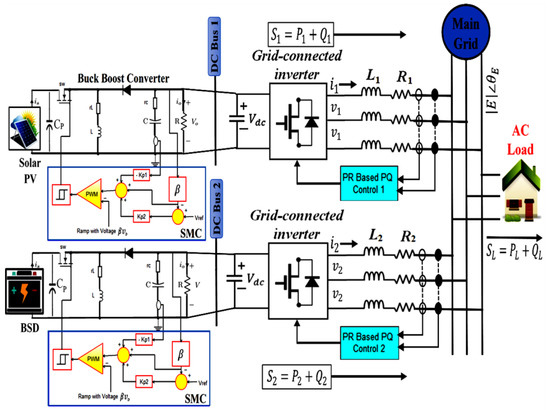
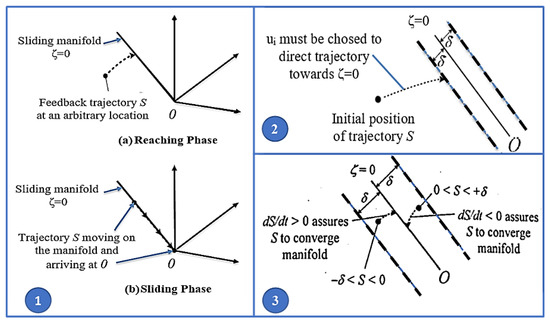
A New Decentralized PQ Control for Parallel Inverters in Grid-Tied Microgrids Propelled by SMC-Based Buck–Boost Converters
by
Ali M. Jasim, Basil H. Jasim and Bogdan-Constantin Neagu
Cited by 16 | Viewed by 2945
Abstract
Nowadays, the microgrid (MG) concept is regarded as an efficient approach to incorporating renewable generation resources into distribution networks. However, managing power flows to distribute load power among distribution generators (DGs) remains a critical focus, particularly during peak demand. The purpose of this
[...] Read more.
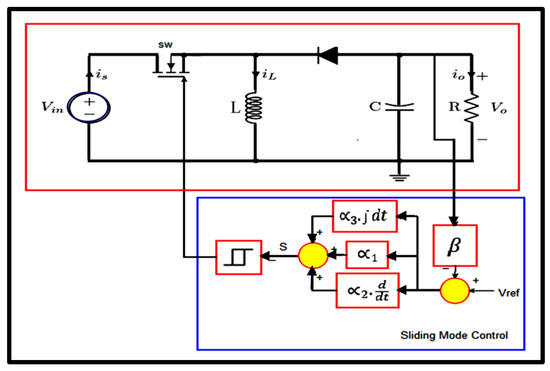
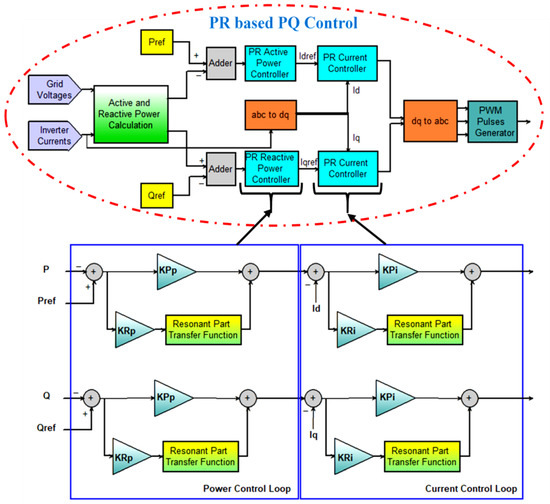
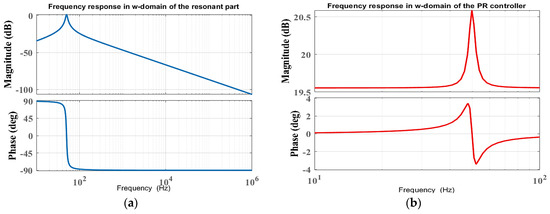
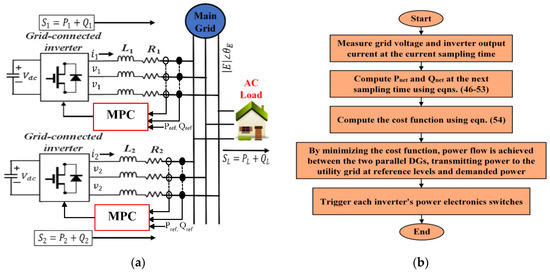
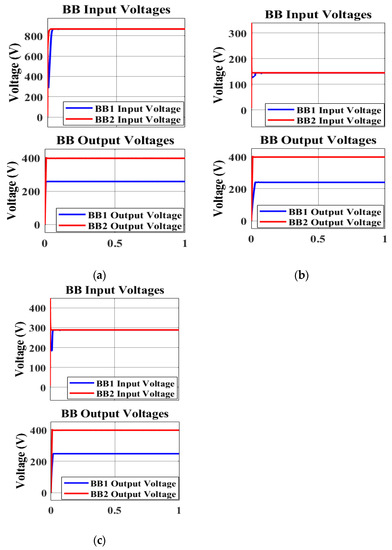
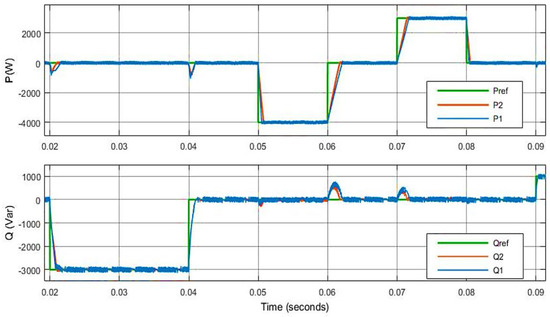
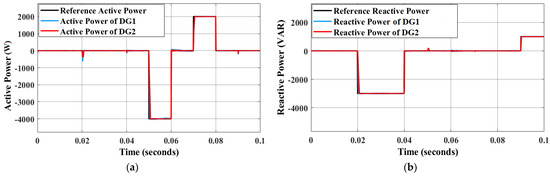
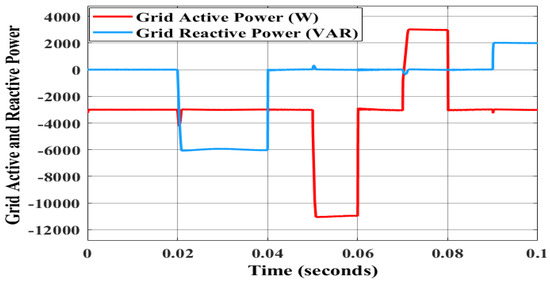
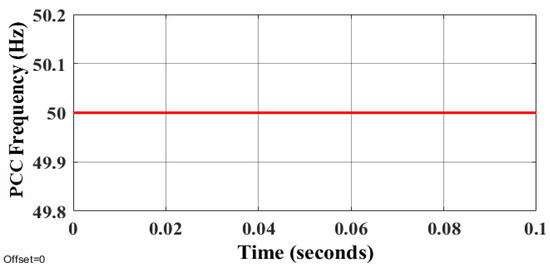
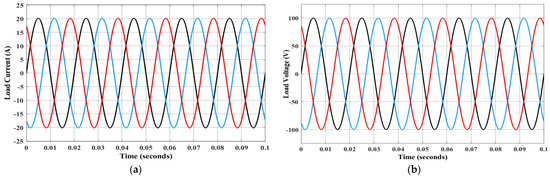
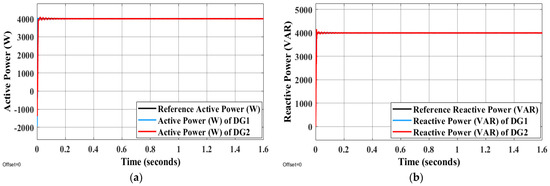
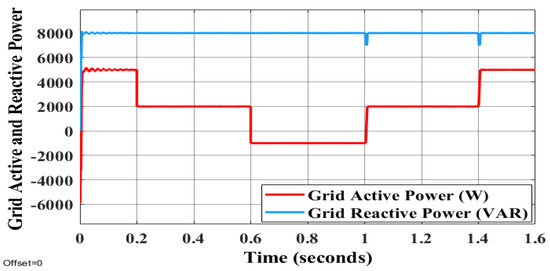
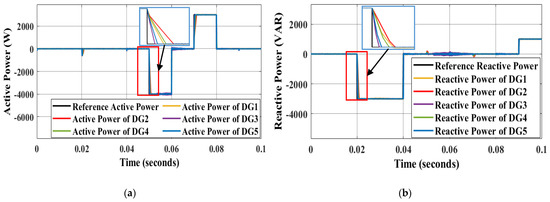
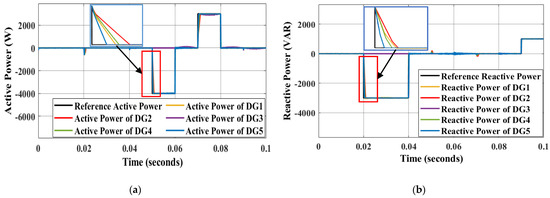
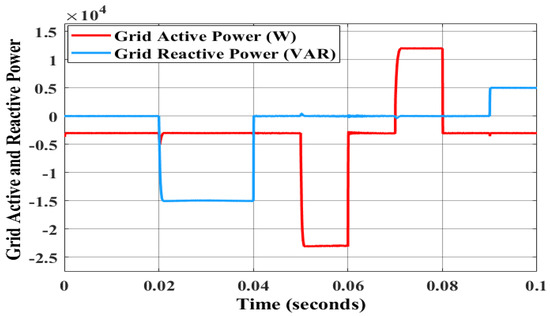
Nowadays, the microgrid (MG) concept is regarded as an efficient approach to incorporating renewable generation resources into distribution networks. However, managing power flows to distribute load power among distribution generators (DGs) remains a critical focus, particularly during peak demand. The purpose of this paper is to control the adopted grid-tied MG performance and manage the power flow from/to the parallel DGs and the main grid using discrete-time active/reactive power (PQ) control based on digital proportional resonant (PR) controllers. The PR controller is used to eliminate harmonics by acting as a digital infinite-impulse response (IIR) filter with a high gain at the resonant frequency. Additionally, the applied PR controller has fast reference signal tracking, responsiveness to grid frequency drift, and no steady-state error. Moreover, this paper describes the application of robust nonlinear sliding mode control (SMC)-technique-based buck–boost (BB) converters. The sliding adaptive control scheme is applied to prevent the output voltage error that occurs during DG failure, load variations, or system parameter changes. This paper deals with two distinct case studies. The first one focuses on applying the proposed control for two parallel DGs with and without load-changing conditions. In the latter case, the MG is expanded to include five DGs (with and without DG failure). The proposed control technique has been compared with the droop control and model predictive control (MPC) techniques. As demonstrated by the simulation results in MATLAB software, the proposed method outperformed the others in terms of both performance analysis and the ability to properly share power between parallel DGs and the utility grid.
Full article
►▼
Show Figures
Open AccessArticle
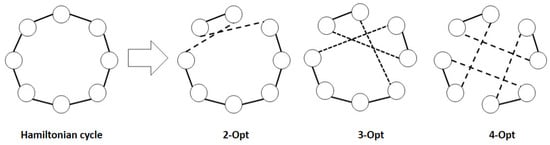
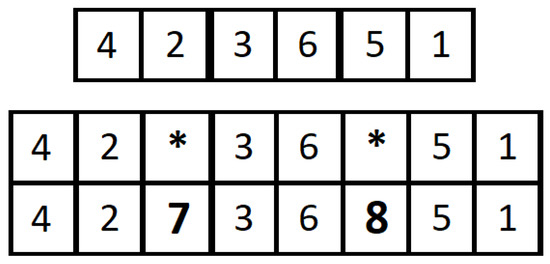
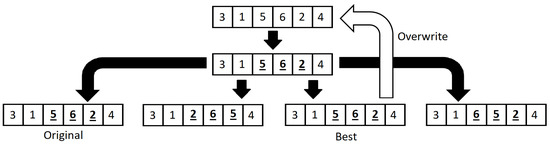
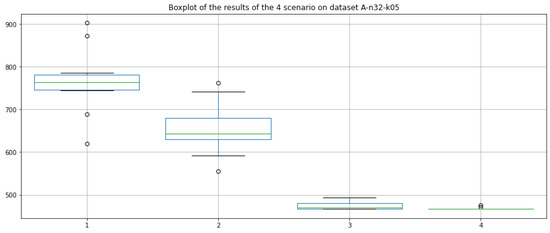
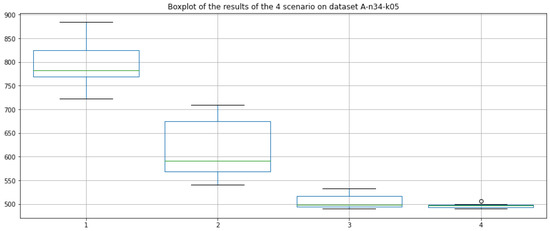
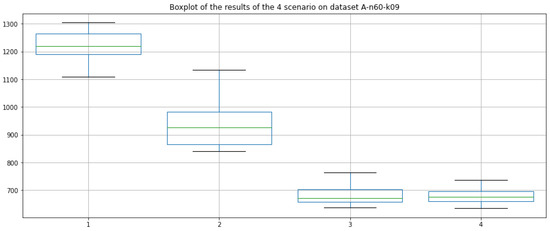
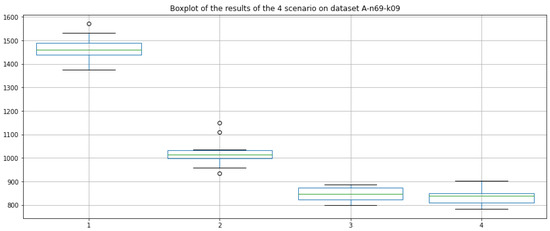
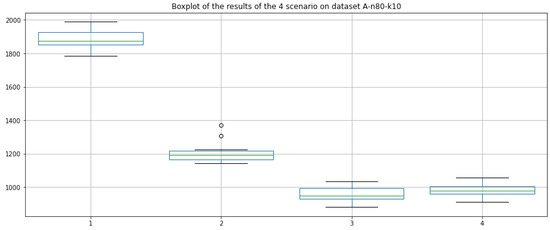
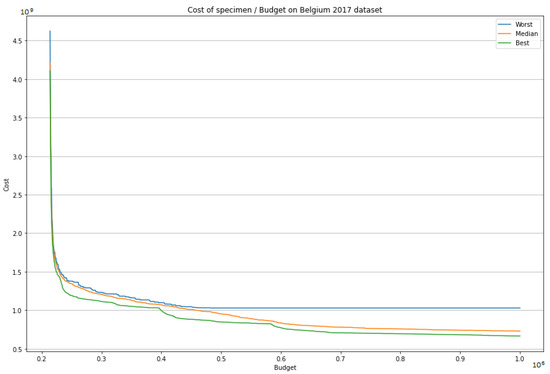
Bacterial Memetic Algorithm for Asymmetric Capacitated Vehicle-Routing Problem
by
Ákos Holló-Szabó and János Botzheim
Cited by 3 | Viewed by 1705
Abstract
The vehicle-routing problem (VRP) has many variants, including the most accurate models of real-life transportation tasks, making it one of the most important mathematical problems in the field of logistics. Our goal was to design an algorithm that can race against the most
[...] Read more.
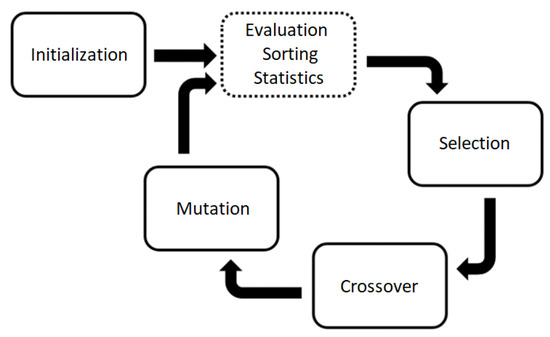
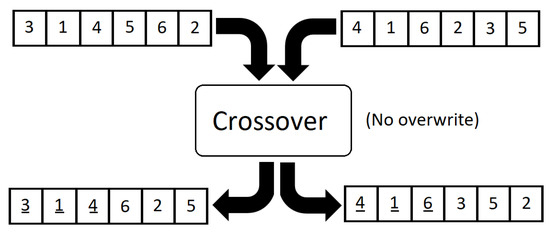
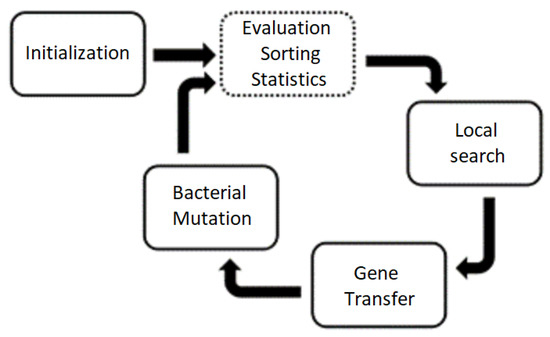
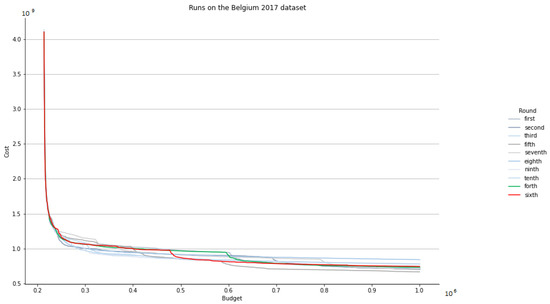
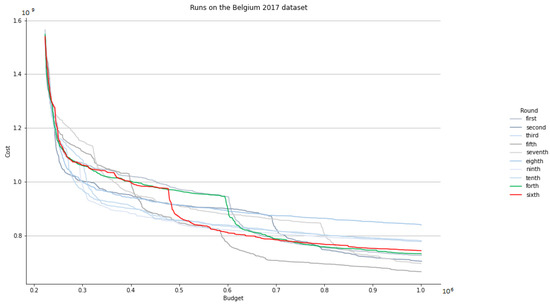
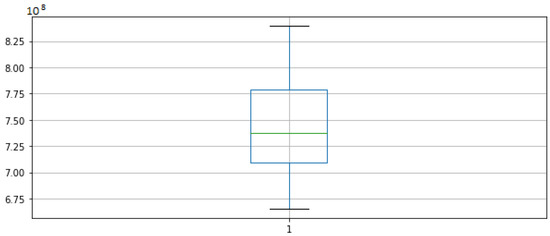
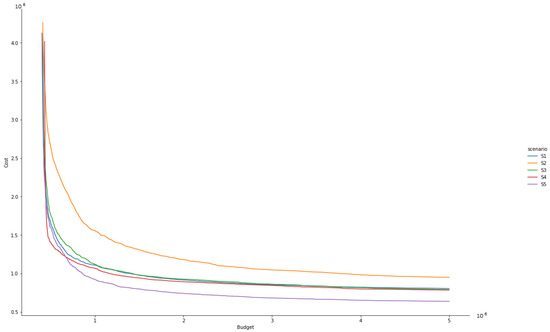
The vehicle-routing problem (VRP) has many variants, including the most accurate models of real-life transportation tasks, making it one of the most important mathematical problems in the field of logistics. Our goal was to design an algorithm that can race against the most recent solutions for VRP and capacitated VRP (CVRP), while also being applicable to real-life models with simulations of real transports. Our algorithm is a variant of the bacterial memetic algorithm (BMA), which we improve upon with novel operators and better methods for manual parameter optimization. The key to our performance is a balanced mixture of the global search of evolutionary algorithms, local search of 2-OPT variants, and the pseudo-global search of probabilistic construction algorithms. Our algorithm benefits from the advantages of all three methods resulting in fast convergence and avoidance of global minima. This is the first time BMA is applied for VRP, meaning that we had to adapt the method for the new problem. We compare our method with some of the most-used methods for VRP on the ABEFMP 1995 dataset. We provide comparison results with the coronavirus herd immunity optimizer, genetic algorithm, hybridization of genetic algorithm with neighborhood search, firefly algorithm, enhanced firefly algorithm, ant colony optimization, and variable neighborhood search. Our algorithm performed better on all data instances, yielding at least a
improvement. We present our best result on the Belgium 2017 dataset for future reference. Finally, we show that our algorithm is capable of handling real-life models. Here we are also illustrating the significance of the different parameters.
Full article
►▼
Show Figures
Open AccessArticle
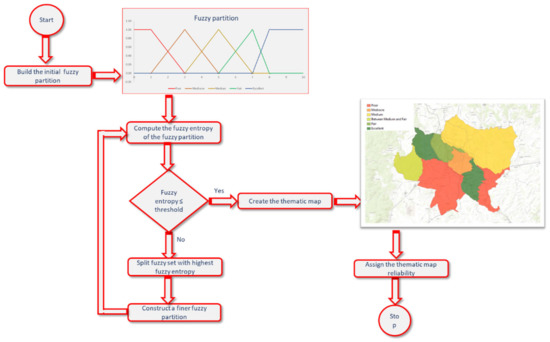
A Fuzzy Entropy-Based Thematic Classification Method Aimed at Improving the Reliability of Thematic Maps in GIS Environments
by
Barbara Cardone and Ferdinando Di Martino
Cited by 3 | Viewed by 1345
Abstract
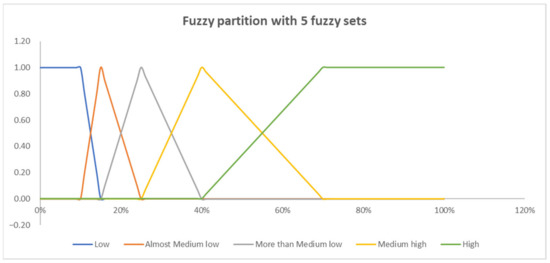
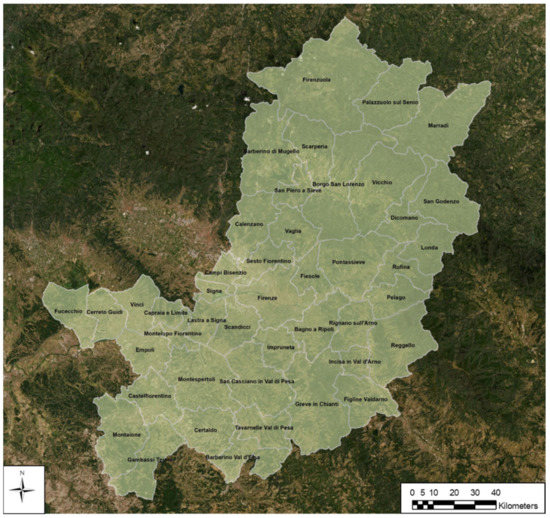
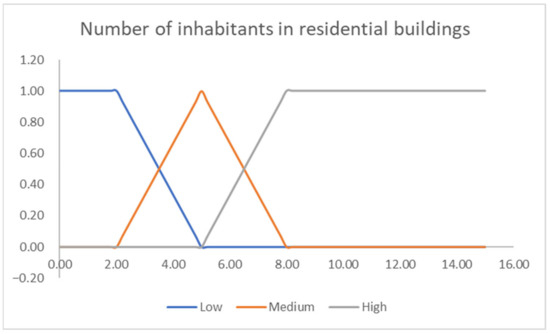
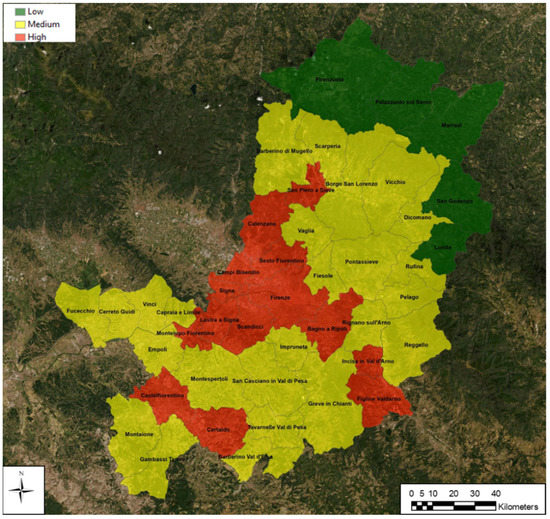
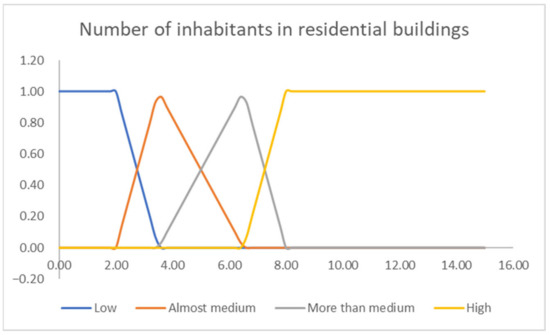
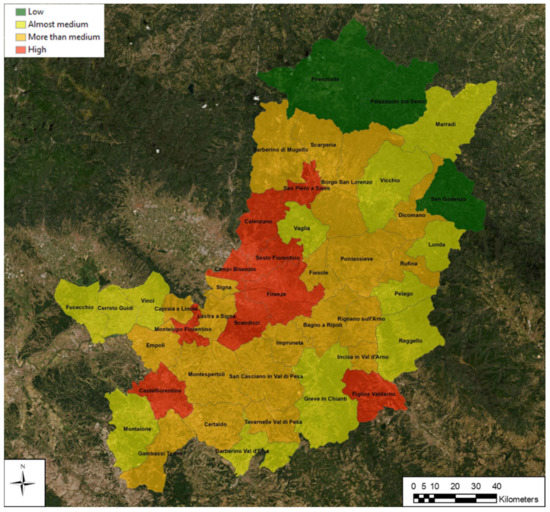
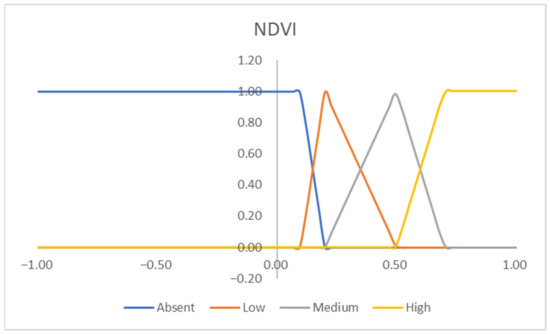
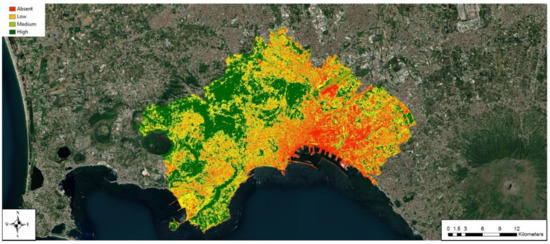
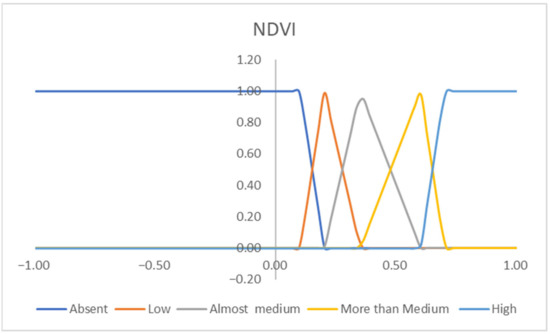
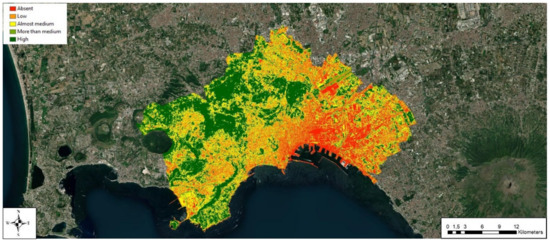
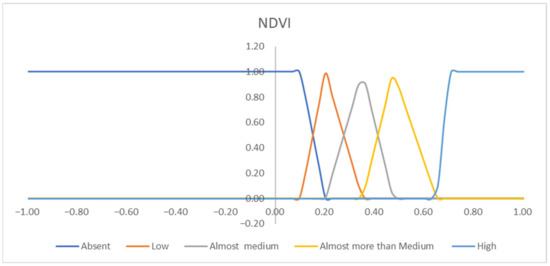
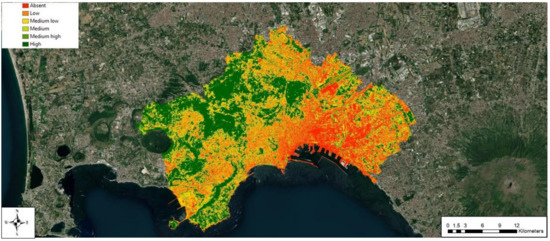
Thematic maps of spatial data are constructed by using standard thematic classification methods that do not allow management of the uncertainty of classification and, consequently, evaluation of the reliability of the resulting thematic map. We propose a novel fuzzy-based thematic classification method applied
[...] Read more.
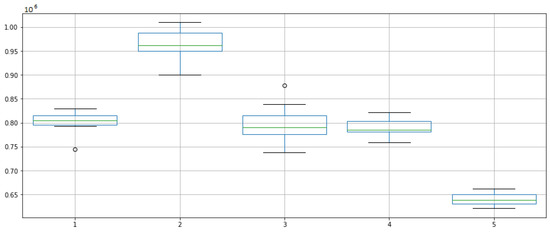
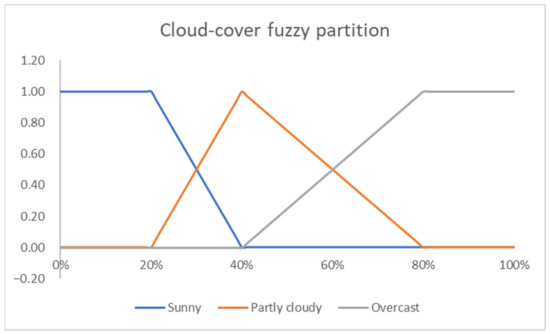
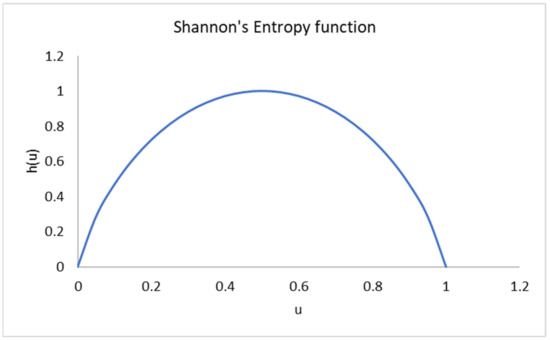
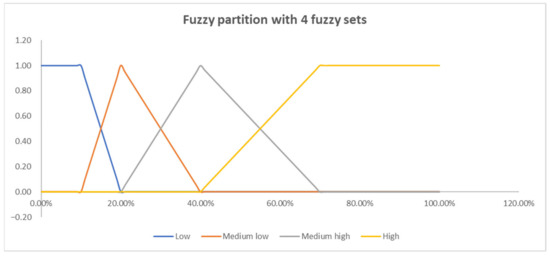
Thematic maps of spatial data are constructed by using standard thematic classification methods that do not allow management of the uncertainty of classification and, consequently, evaluation of the reliability of the resulting thematic map. We propose a novel fuzzy-based thematic classification method applied to construct thematic maps in Geographical Information Systems. An initial fuzzy partition of the domain of the features of the spatial dataset is constructed using triangular fuzzy numbers; our method finds an optimal fuzzy partition evaluating the fuzziness of the fuzzy sets by using a fuzzy entropy measure. An assessment of the reliability of the final thematic map is performed according to the fuzziness of the fuzzy sets. We implement our method on a GIS framework, testing it on various vector and image spatial datasets. The results of these tests confirm that our thematic classification method provide thematic maps with a higher reliability with respect to that obtained through fuzzy partitions constructed by expert users.
Full article
►▼
Show Figures
Open AccessArticle
Trend Prediction Based on Multi-Modal Affective Analysis from Social Networking Posts
by
Kazuyuki Matsumoto, Reishi Amitani, Minoru Yoshida and Kenji Kita
Cited by 2 | Viewed by 1592
Abstract
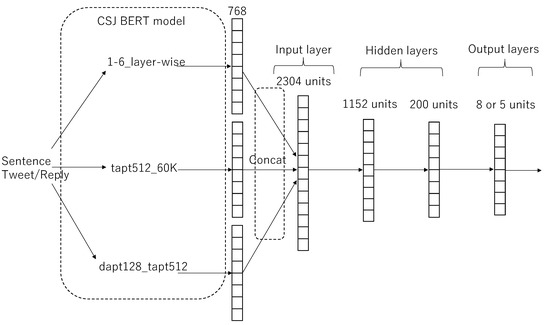
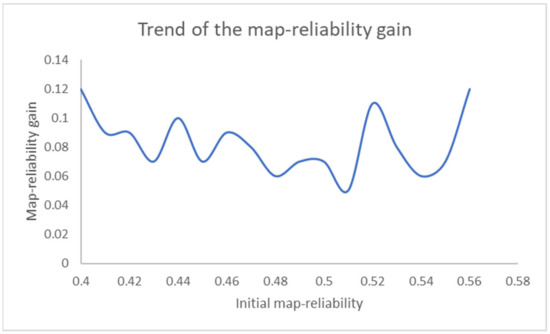
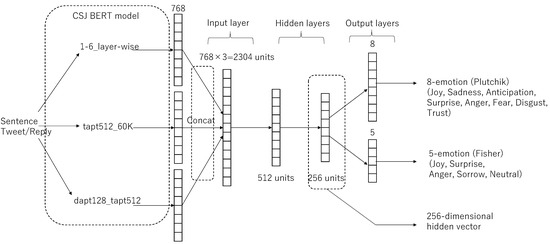
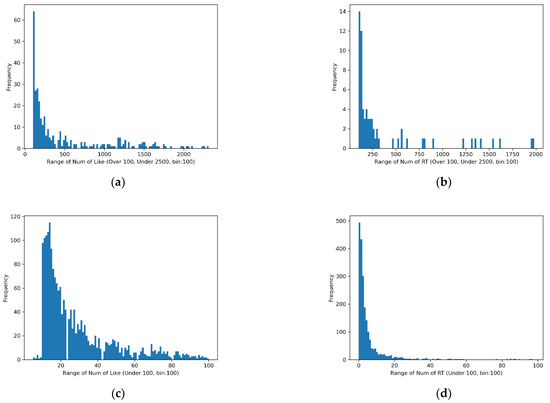
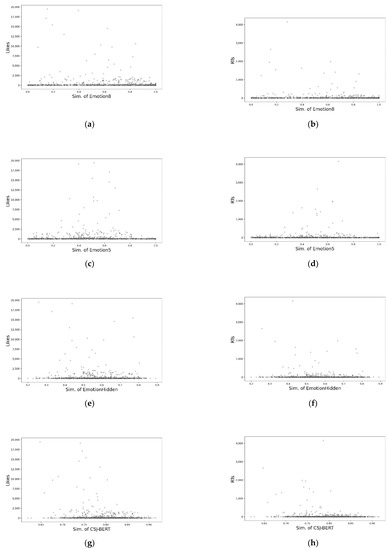
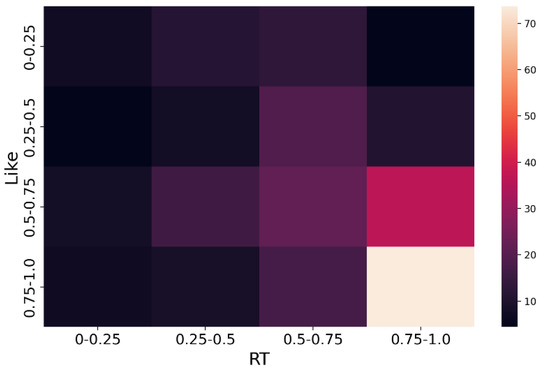
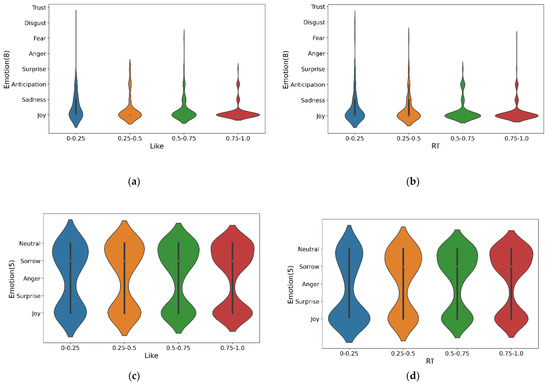
This paper propose a method to predict the stage of buzz-trend generation by analyzing the emotional information posted on social networking services for multimodal information, such as posted text and attached images, based on the content of the posts. The proposed method can
[...] Read more.
This paper propose a method to predict the stage of buzz-trend generation by analyzing the emotional information posted on social networking services for multimodal information, such as posted text and attached images, based on the content of the posts. The proposed method can analyze the diffusion scale from various angles, using only the information at the time of posting, when predicting in advance and the information of time error, when used for posterior analysis. Specifically, tweets and reply tweets were converted into vectors using the BERT general-purpose language model that was trained in advance, and the attached images were converted into feature vectors using a trained neural network model for image recognition. In addition, to analyze the emotional information of the posted content, we used a proprietary emotional analysis model to estimate emotions from tweets, reply tweets, and image features, which were then added to the input as emotional features. The results of the evaluation experiments showed that the proposed method, which added linguistic features (BERT vectors) and image features to tweets, achieved higher performance than the method using only a single feature. Although we could not observe the effectiveness of the emotional features, the more emotions a tweet and its reply match had, the more empathy action occurred and the larger the like and RT values tended to be, which could ultimately increase the likelihood of a tweet going viral.
Full article
►▼
Show Figures
Open AccessArticle
Methods for Model Complexity Reduction for the Nonlinear Calibration of Amplifiers Using Volterra Kernels
by
Francesco Centurelli, Pietro Monsurrò, Giuseppe Scotti, Pasquale Tommasino and Alessandro Trifiletti
Cited by 1 | Viewed by 1611
Abstract
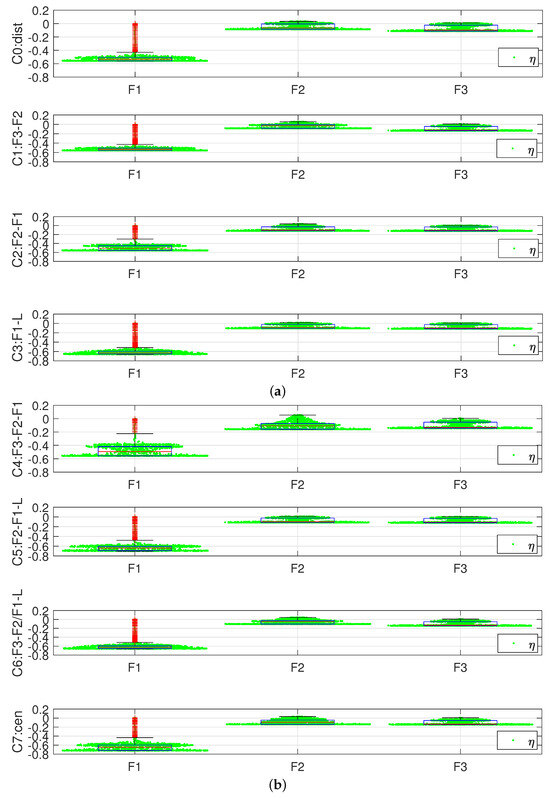
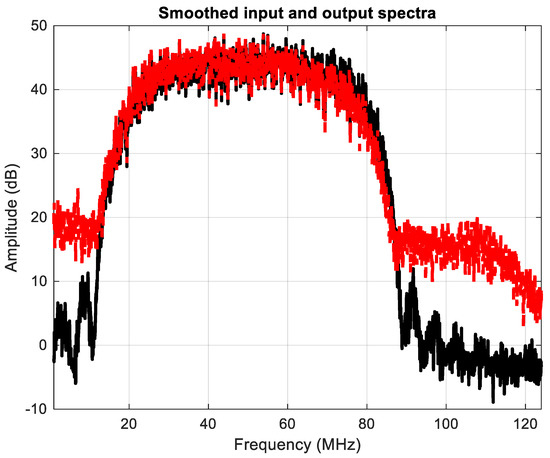
Volterra models allow modeling nonlinear dynamical systems, even though they require the estimation of a large number of parameters and have, consequently, potentially large computational costs. The pruning of Volterra models is thus of fundamental importance to reduce the computational costs of nonlinear
[...] Read more.
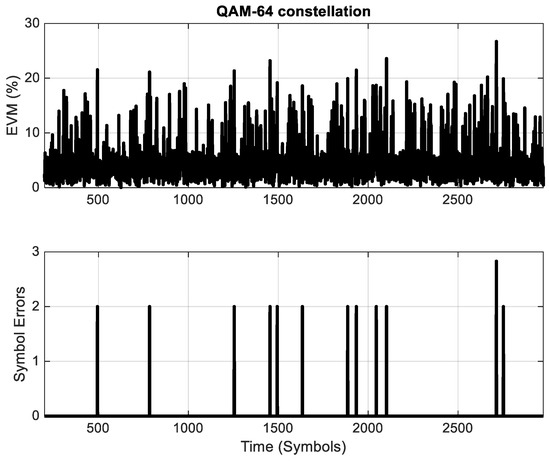
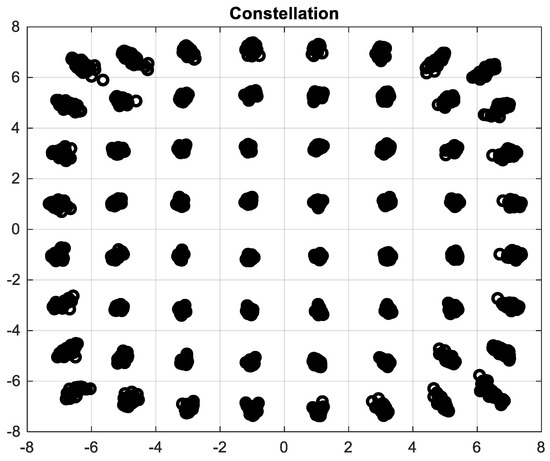
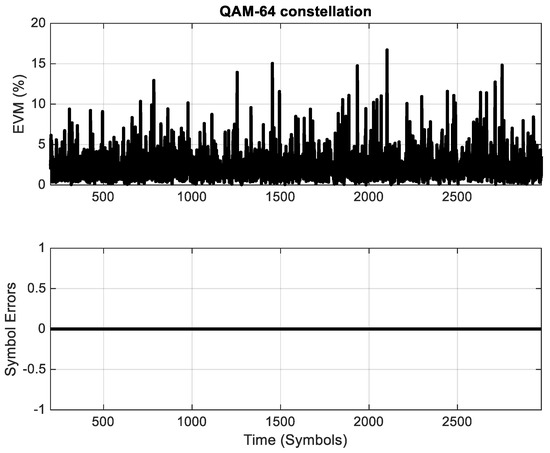
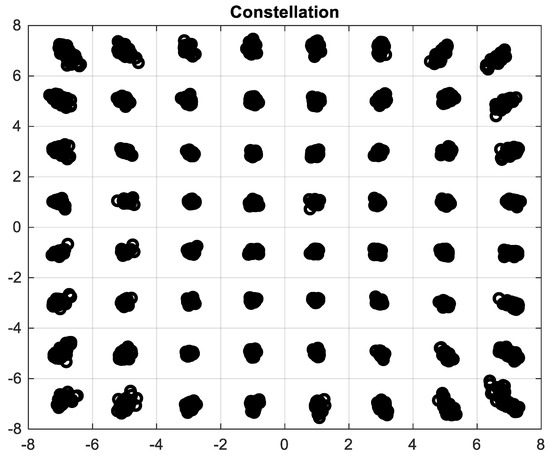
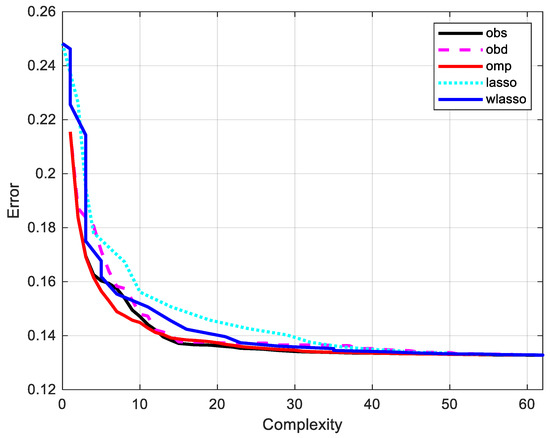
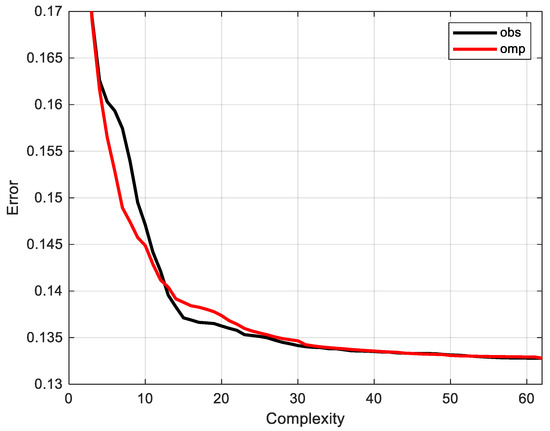
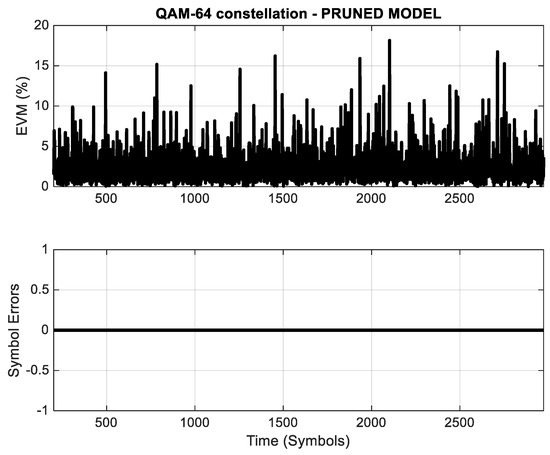
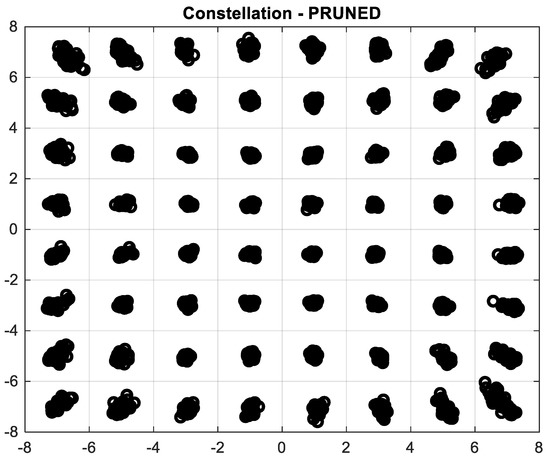
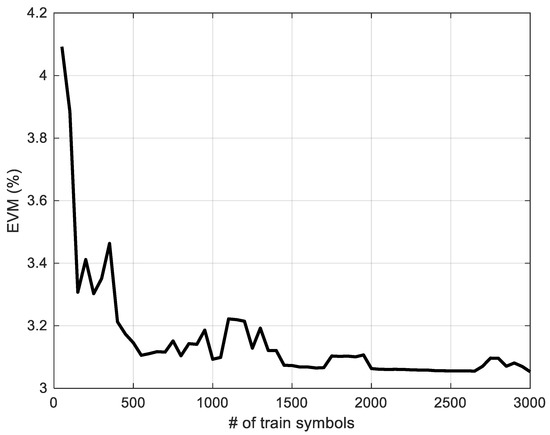
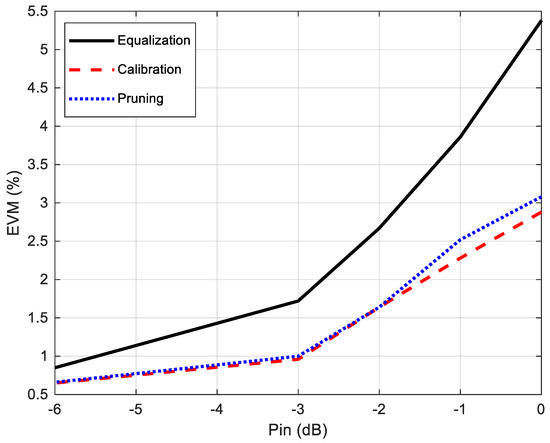
Volterra models allow modeling nonlinear dynamical systems, even though they require the estimation of a large number of parameters and have, consequently, potentially large computational costs. The pruning of Volterra models is thus of fundamental importance to reduce the computational costs of nonlinear calibration, and improve stability and speed, while preserving accuracy. Several techniques (LASSO, DOMP and OBS) and their variants (WLASSO and OBD) are compared in this paper for the experimental calibration of an IF amplifier. The results show that Volterra models can be simplified, yielding models that are 4–5 times sparser, with a limited impact on accuracy. About 6 dB of improved Error Vector Magnitude (EVM) is obtained, improving the dynamic range of the amplifiers. The Symbol Error Rate (SER) is greatly reduced by calibration at a large input power, and pruning reduces the model complexity without hindering SER. Hence, pruning allows improving the dynamic range of the amplifier, with almost an order of magnitude reduction in model complexity. We propose the OBS technique, used in the neural network field, in conjunction with the better known DOMP technique, to prune the model with the best accuracy. The simulations show, in fact, that the OBS and DOMP techniques outperform the others, and OBD, LASSO and WLASSO are, in turn, less efficient. A methodology for pruning in the complex domain is described, based on the Frisch–Waugh–Lovell (FWL) theorem, to separate the linear and nonlinear sections of the model. This is essential because linear models are used for equalization and cannot be pruned to preserve model generality vis-a-vis channel variations, whereas nonlinear models must be pruned as much as possible to minimize the computational overhead. This methodology can be extended to models other than the Volterra one, as the only conditions we impose on the nonlinear model are that it is feedforward and linear in the parameters.
Full article
►▼
Show Figures
Open AccessFeature PaperArticle
A Piece-Wise Linear Model-Based Algorithm for the Identification of Nonlinear Models in Real-World Applications
by
Claudio Carnevale, Lucia Sangiorgi, Renata Mansini and Roberto Zanotti
Cited by 2 | Viewed by 1549
Abstract
In this work, a data-driven approach for the identification of a piece-wise linear model for nitrogen oxide daily concentration simulation is presented and applied. The model has been identified by using daily measured concentrations, meteorological variables, and emission levels estimated starting from the
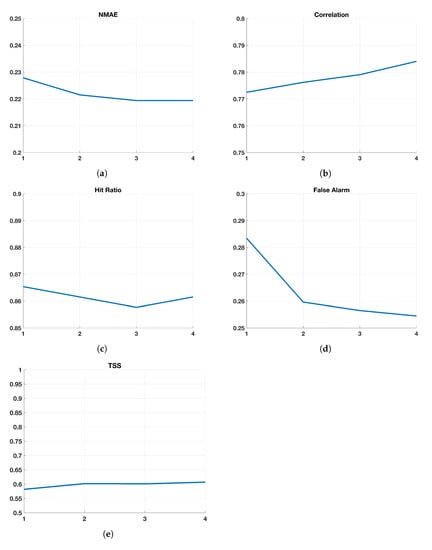
[...] Read more.
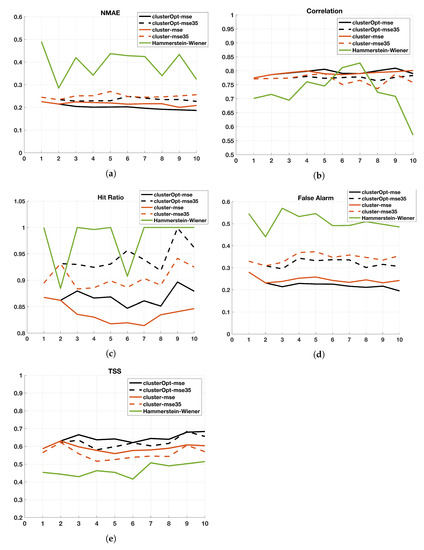
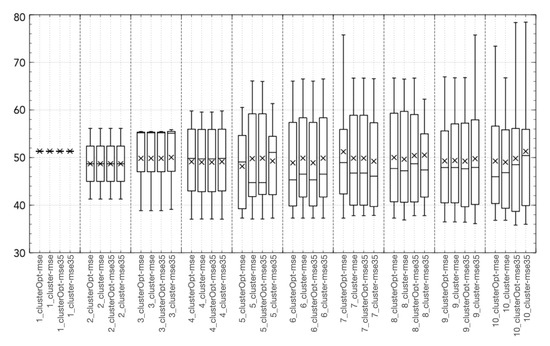
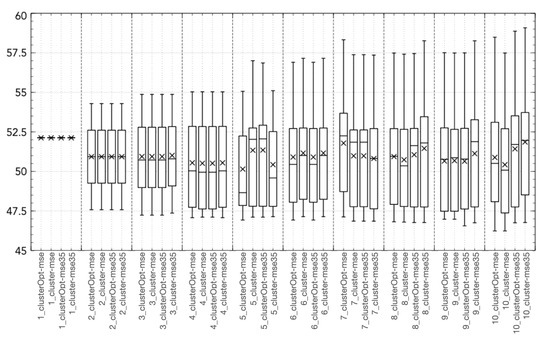
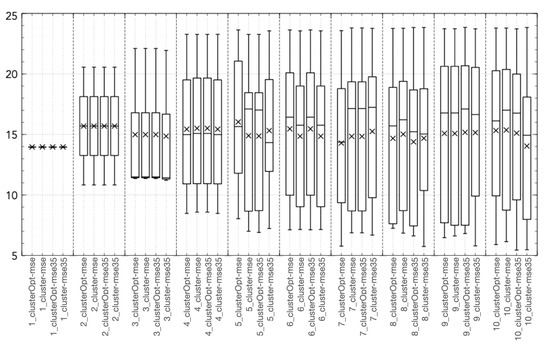
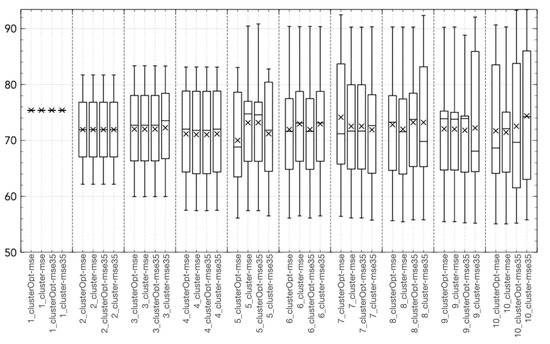
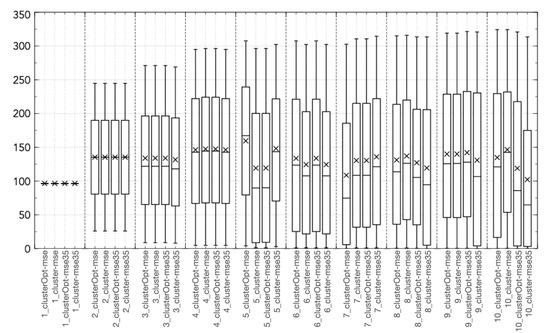
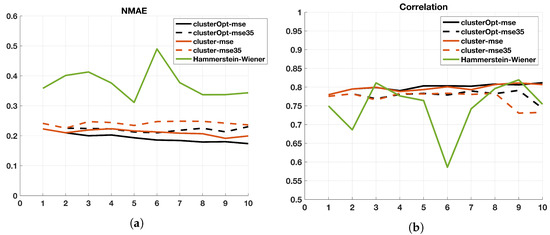
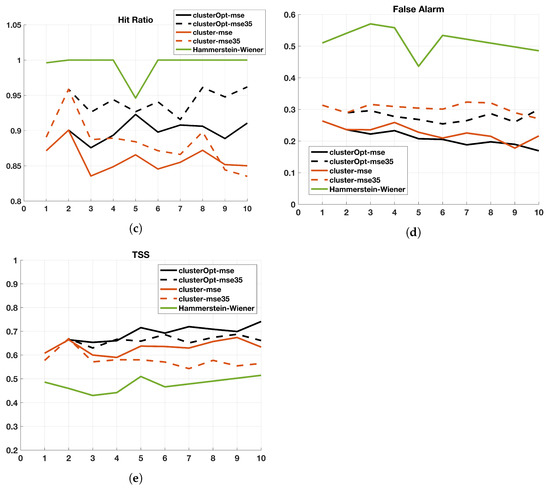
In this work, a data-driven approach for the identification of a piece-wise linear model for nitrogen oxide daily concentration simulation is presented and applied. The model has been identified by using daily measured concentrations, meteorological variables, and emission levels estimated starting from the results contained in suitable emission databases. We propose an innovative methodology that jointly optimizes clustering and parameter identification. The procedure has been applied considering data from the Milan (Italy) metropolitan area. The methodology has been compared with two state-of-the-art approaches based on a two-step, cluster-based algorithm and on Hammerstein–Wiener models. The results show how, in the presented application, the devised approach ensures better performance with respect to the two literature methods, both in terms of statistical indexes (correlation, normalized mean absolute error) and in terms of problem-specific metrics (hit ratio, false alarm). For this reason, the approach can be considered suitable to be used in the definition of optimal emission control strategies.
Full article
►▼
Show Figures
Open AccessArticle
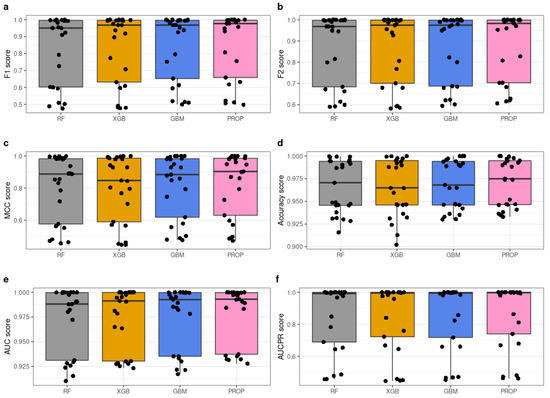
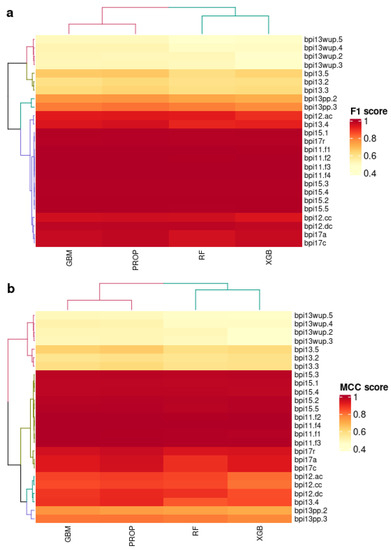
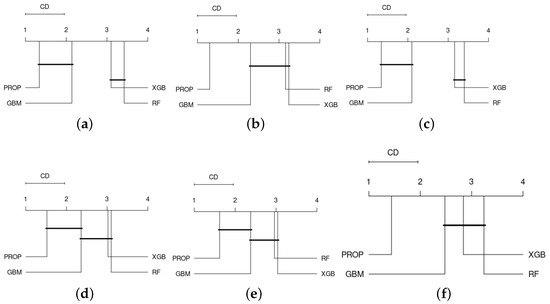
Leveraging a Heterogeneous Ensemble Learning for Outcome-Based Predictive Monitoring Using Business Process Event Logs
by
Bayu Adhi Tama and Marco Comuzzi
Cited by 1 | Viewed by 1487
Abstract
Outcome-based predictive process monitoring concerns predicting the outcome of a running process case using historical events stored as so-called process event logs. This prediction problem has been approached using different learning models in the literature. Ensemble learners have been shown to be particularly
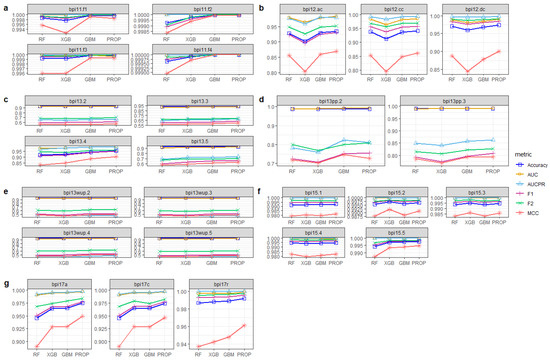
[...] Read more.
Outcome-based predictive process monitoring concerns predicting the outcome of a running process case using historical events stored as so-called process event logs. This prediction problem has been approached using different learning models in the literature. Ensemble learners have been shown to be particularly effective in outcome-based business process predictive monitoring, even when compared with learners exploiting complex deep learning architectures. However, the ensemble learners that have been used in the literature rely on weak base learners, such as decision trees. In this article, an advanced stacking ensemble technique for outcome-based predictive monitoring is introduced. The proposed stacking ensemble employs strong learners as base classifiers, i.e., other ensembles. More specifically, we consider stacking of random forests, extreme gradient boosting machines, and gradient boosting machines to train a process outcome prediction model. We evaluate the proposed approach using publicly available event logs. The results show that the proposed model is a promising approach for the outcome-based prediction task. We extensively compare the performance differences among the proposed methods and the base strong learners, using also statistical tests to prove the generalizability of the results obtained.
Full article
►▼
Show Figures
Open AccessArticle
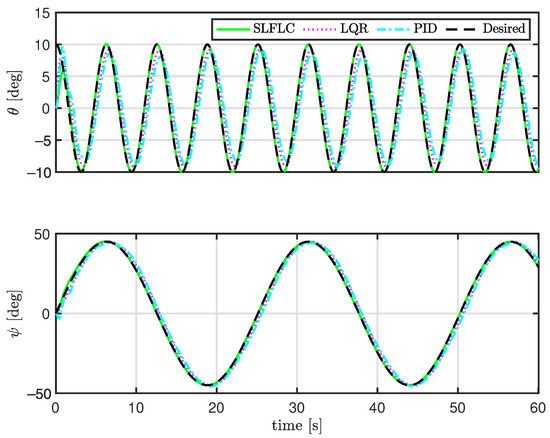
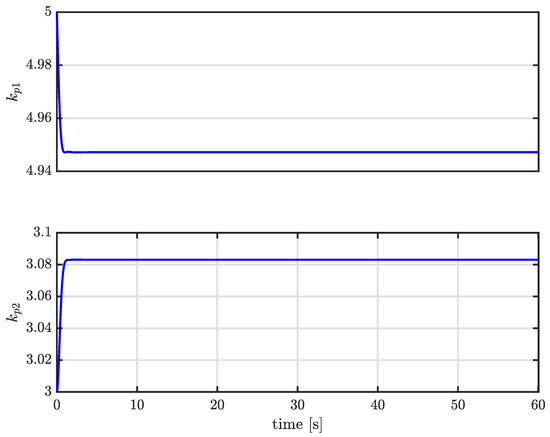
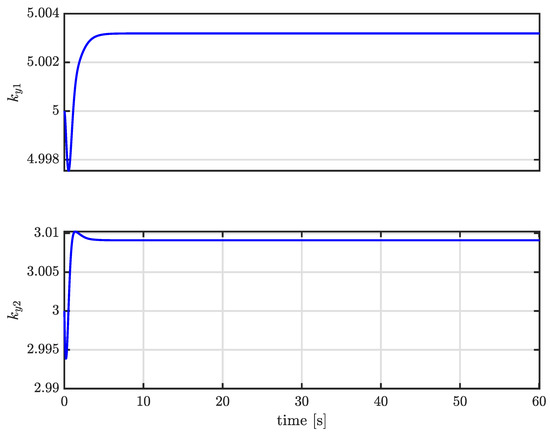
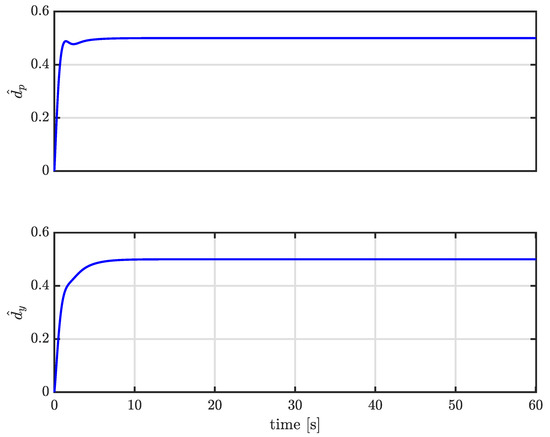
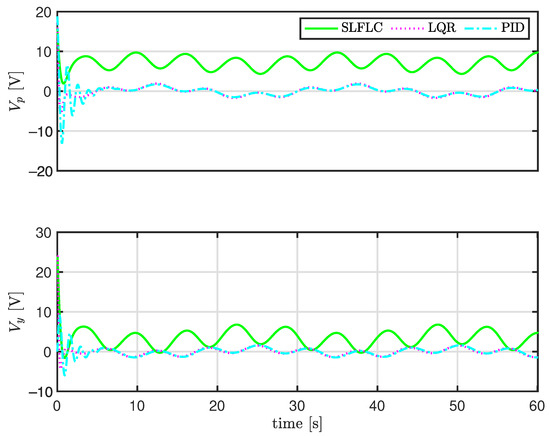
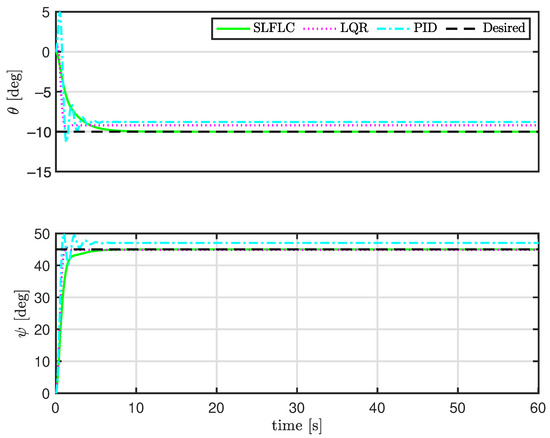
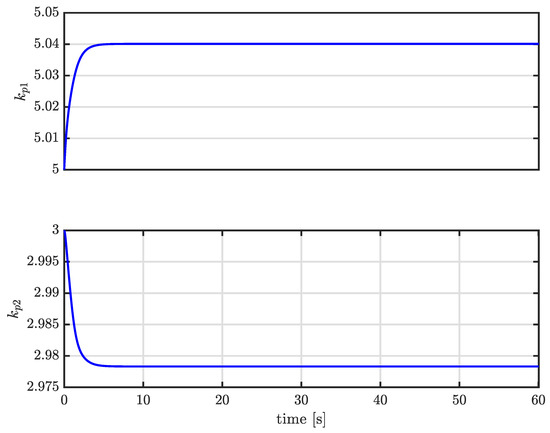
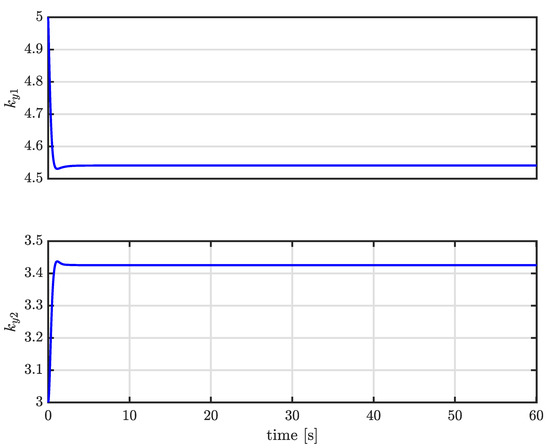
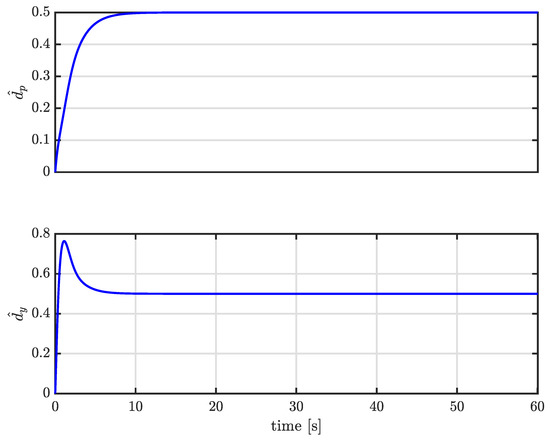
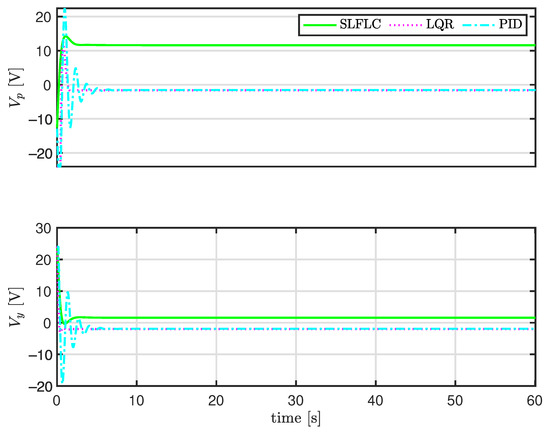
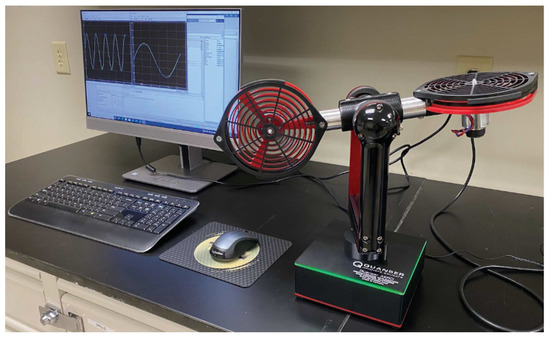
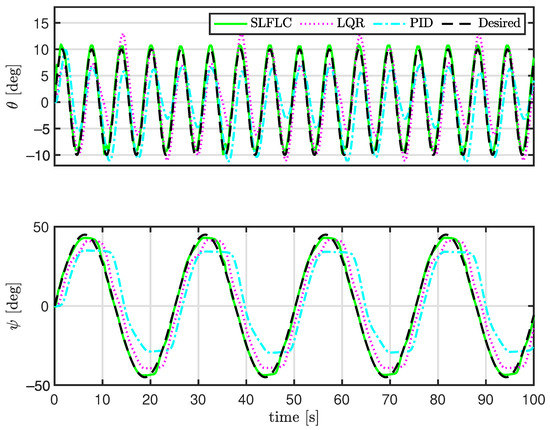
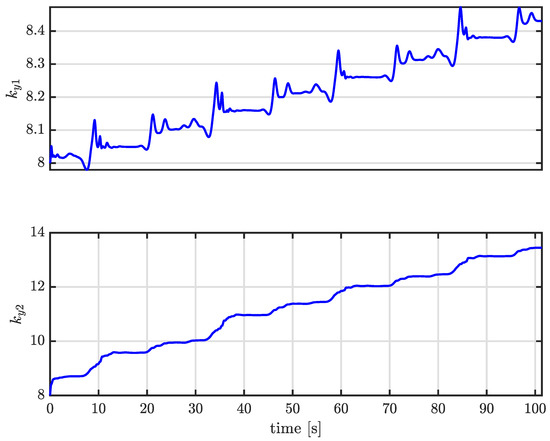
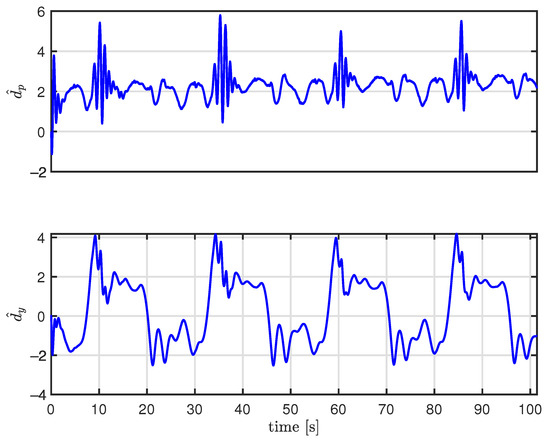
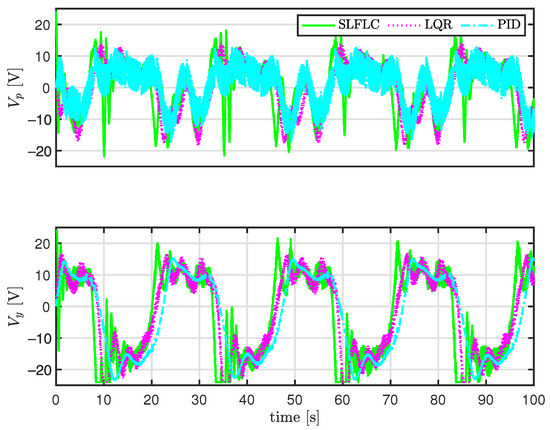
Simple Learning-Based Robust Trajectory Tracking Control of a 2-DOF Helicopter System
by
Mahmut Reyhanoglu, Mohammad Jafari and Muhammad Rehan
Cited by 11 | Viewed by 2415
Abstract
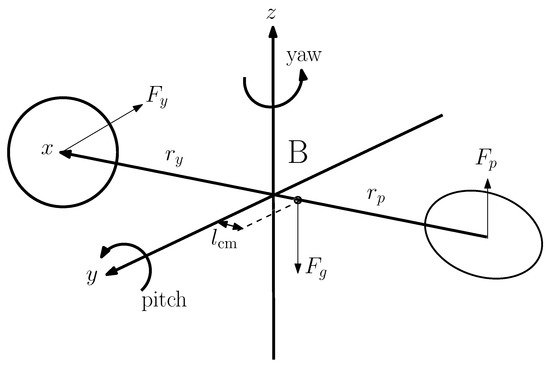
Stabilization and tracking control of Unmanned Aircraft Systems (UASs) such as helicopters in a complex environment with system uncertainties, unknown disturbances, and noise is a challenging task; therefore, to compensate for system uncertainties and unknown disturbances, this paper presents a trajectory tracking control
[...] Read more.
Stabilization and tracking control of Unmanned Aircraft Systems (UASs) such as helicopters in a complex environment with system uncertainties, unknown disturbances, and noise is a challenging task; therefore, to compensate for system uncertainties and unknown disturbances, this paper presents a trajectory tracking control strategy for a 2-DOF (degree of freedom) helicopter system testbed by employing a gradient descent-based simple learning control law that minimizes the cost function corresponding to desired closed-loop error dynamics of the nonlinear system under control. In addition, to ensure the stability of the closed-loop nonlinear system, further analysis is provided. The learning capability of the designed controller makes it suitable to take system uncertainties and unknown disturbances into account. The results of computer simulations and real-time experiment using the Quanser AERO helicopter are included to demonstrate the effectiveness of the designed control strategy.
Full article
►▼
Show Figures
Open AccessArticle
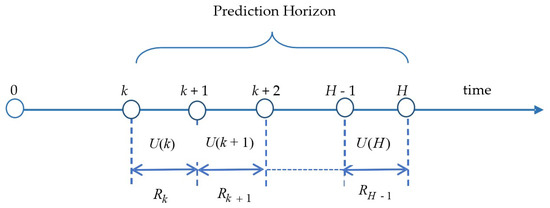
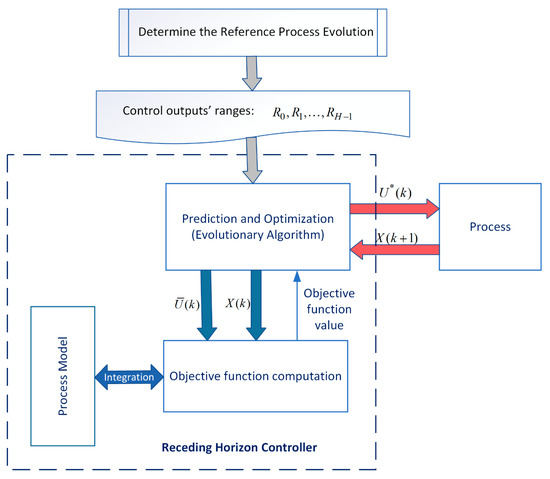
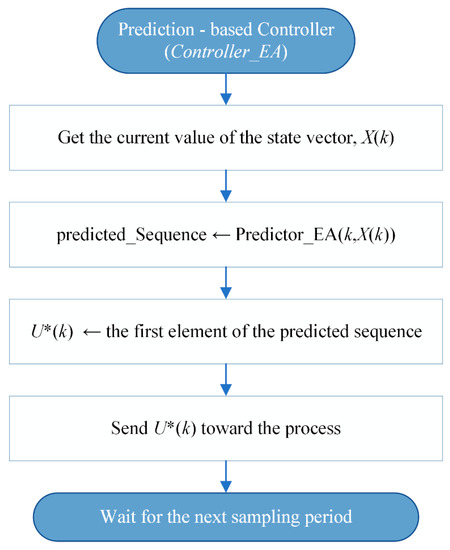
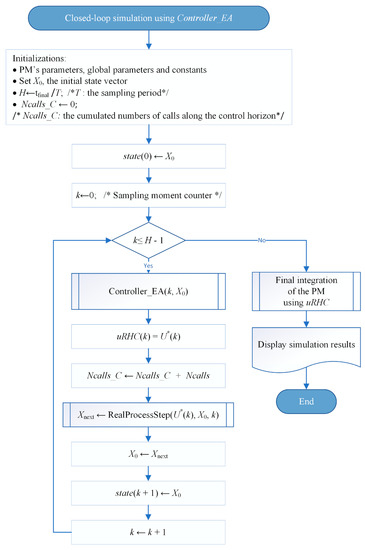
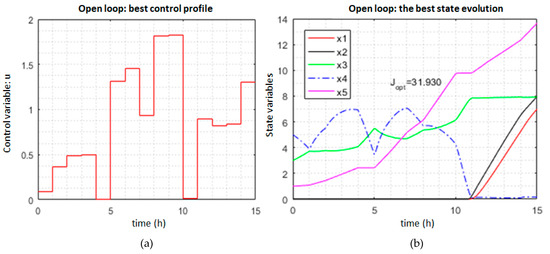
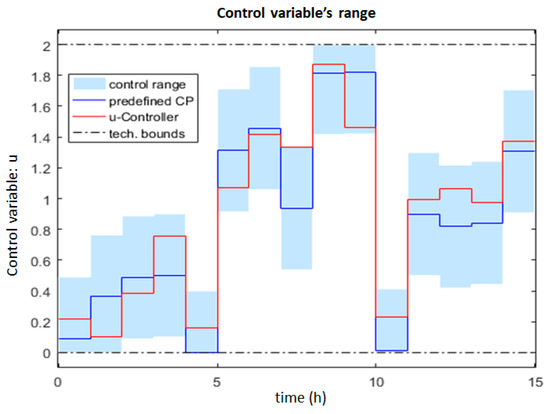
Predictions Based on Evolutionary Algorithms Using Predefined Control Profiles
by
Viorel Mînzu, Lucian Georgescu and Eugen Rusu
Cited by 5 | Viewed by 1585
Abstract
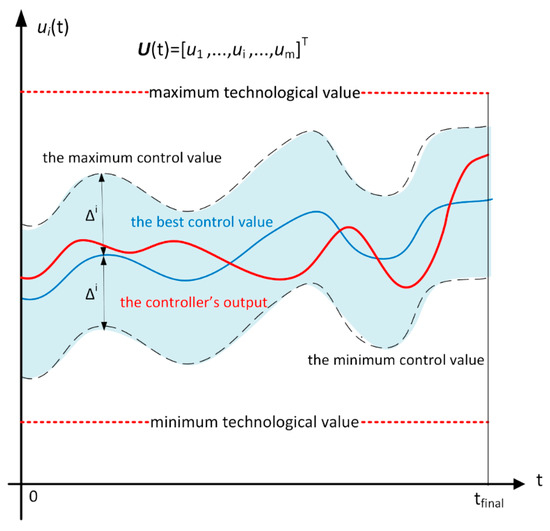
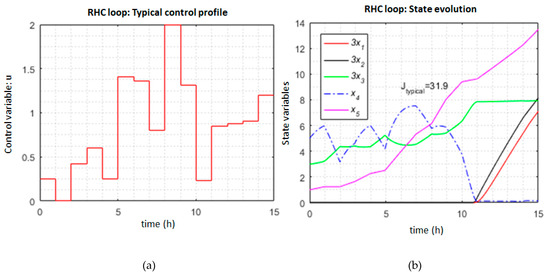
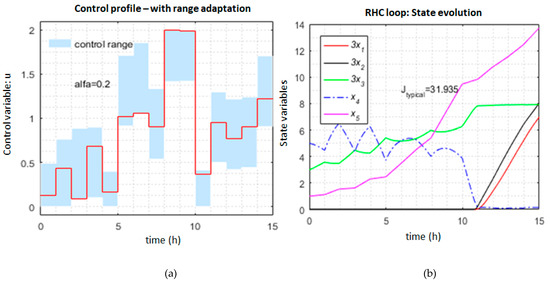
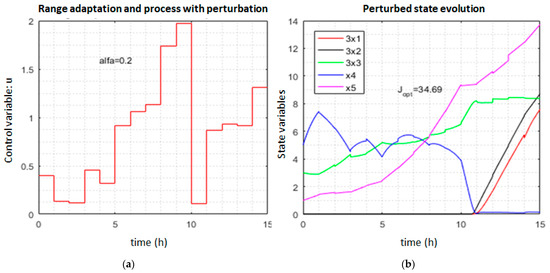
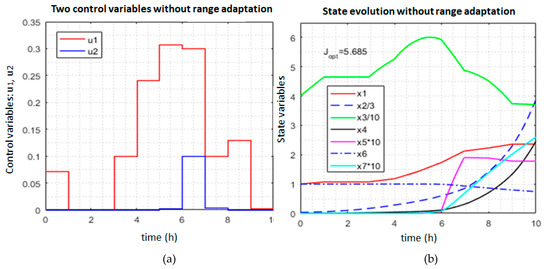
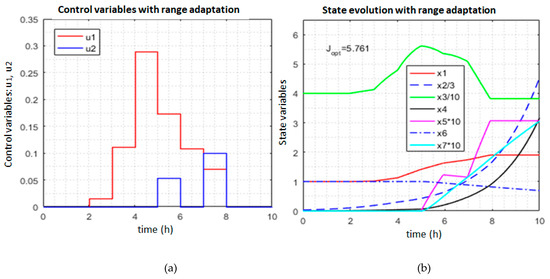
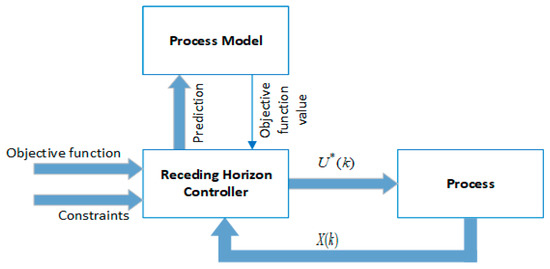
The general motivation of our work is to meet the main time constraint when implementing a control loop: the Controller’s execution time is less than the sampling period. This paper proposes a practical method to diminish the computational complexity of the controllers using
[...] Read more.
The general motivation of our work is to meet the main time constraint when implementing a control loop: the Controller’s execution time is less than the sampling period. This paper proposes a practical method to diminish the computational complexity of the controllers using predictions based on the Evolutionary Algorithm (EA). It is the case of Model Predictive Control or, more generally, Receding Horizon Control structures. The main drawback of the metaheuristic algorithms (including EAs) working in control structures is their great complexity. Usually, the control variables take values between minimum and maximum technological limits. This work’s main idea is to consider the control variables’ domain inside a predefined control profile’s neighbourhood. The Controller takes into account a smaller domain of the control variables without tracking the predefined control profile or a reference trajectory. The convergence of the EA under consideration is not affected; hence, the same best predictions are found. The predefined control profile is already known or can be determined by solving the optimal control problem without time constraints in open-loop and offline. This work also presents a simulation study applying the proposed technique that involves two benchmark control problems. The results prove that the computational complexity decreases significantly.
Full article
►▼
Show Figures
Open AccessArticle
Automatic Weight Prediction System for Korean Cattle Using Bayesian Ridge Algorithm on RGB-D Image
by
Myung Hwan Na, Wan Hyun Cho, Sang Kyoon Kim and In Seop Na
Cited by 18 | Viewed by 3425
Abstract
Weighting the Hanwoo (Korean cattle) is very important for Korean beef producers when selling the Hanwoo at the right time. Recently, research is being conducted on the automatic prediction of the weight of Hanwoo only through images with the achievement of research using
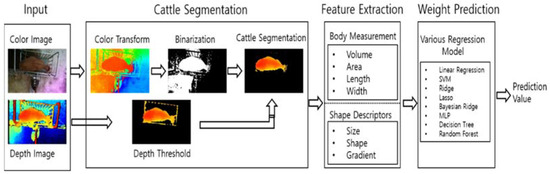
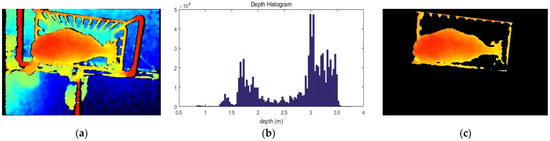
[...] Read more.
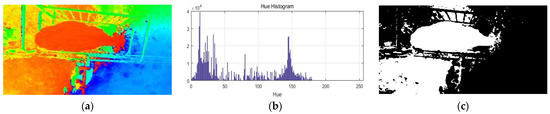
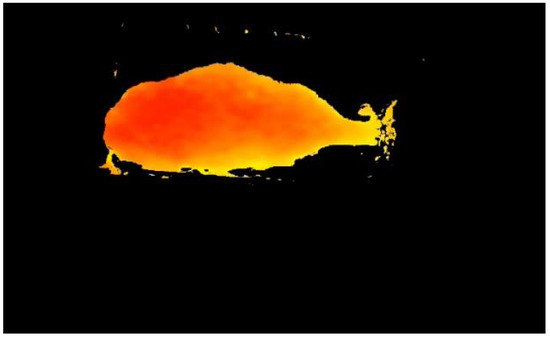
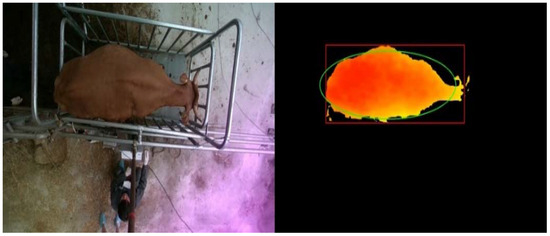
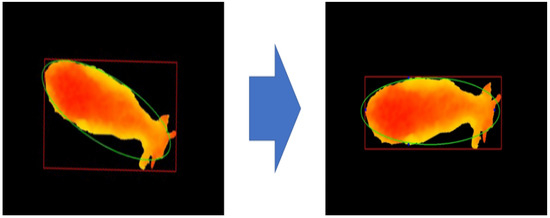
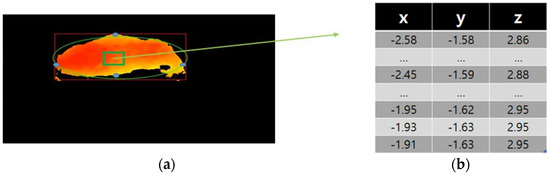
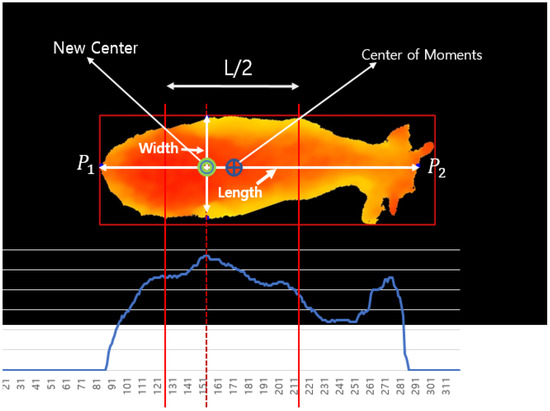
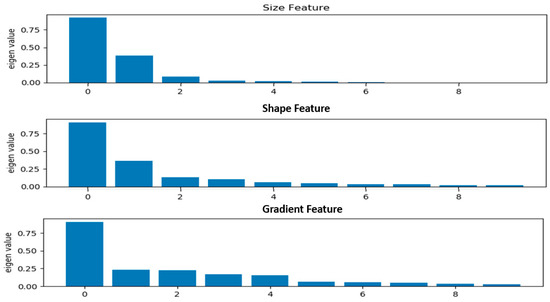
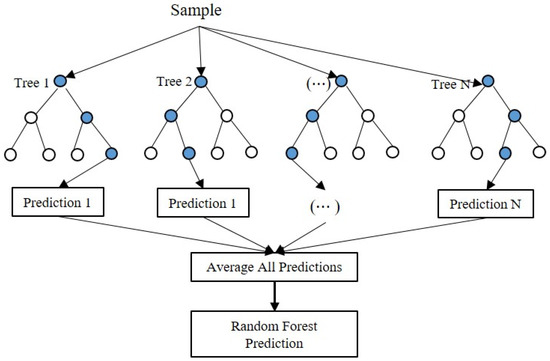
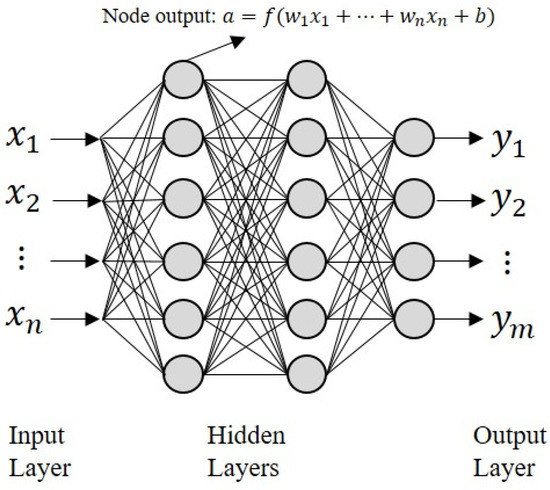
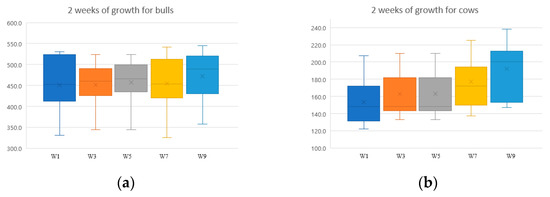
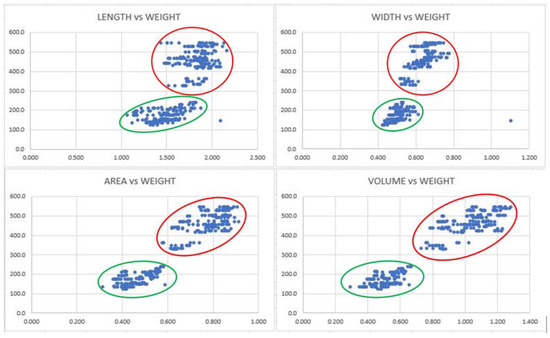
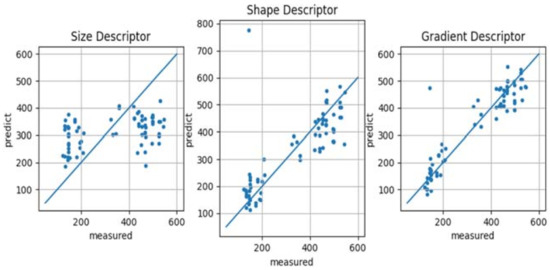
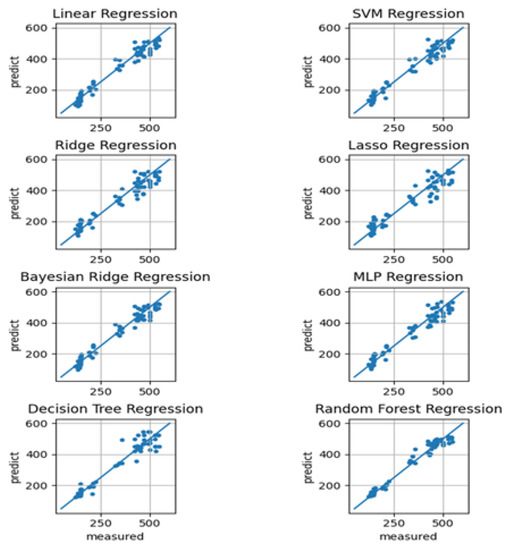
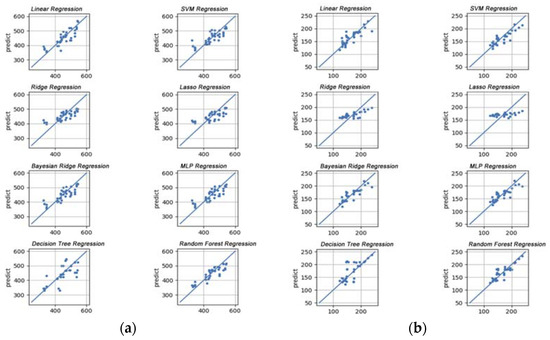
Weighting the Hanwoo (Korean cattle) is very important for Korean beef producers when selling the Hanwoo at the right time. Recently, research is being conducted on the automatic prediction of the weight of Hanwoo only through images with the achievement of research using deep learning and image recognition. In this paper, we propose a method for the automatic weight prediction of Hanwoo using the Bayesian ridge algorithm on RGB-D images. The proposed system consists of three parts: segmentation, extraction of features, and estimation of the weight of Korean cattle from a given RGB-D image. The first step is to segment the Hanwoo area from a given RGB-D image using depth information and color information, respectively, and then combine them to perform optimal segmentation. Additionally, we correct the posture using ellipse fitting on segmented body image. The second step is to extract features for weight prediction from the segmented Hanwoo image. We extracted three features: size, shape, and gradients. The third step is to find the optimal machine learning model by comparing eight types of well-known machine learning models. In this step, we compared each model with the aim of finding an efficient model that is lightweight and can be used in an embedded system in the real field. To evaluate the performance of the proposed weight prediction system, we collected 353 RGB-D images from livestock farms in Wonju, Gangwon-do in Korea. In the experimental results, random forest showed the best performance, and the Bayesian ridge model is the second best in MSE or the coefficient of determination. However, we suggest that the Bayesian ridge model is the most optimal model in the aspect of time complexity and space complexity. Finally, it is expected that the proposed system will be casually used to determine the shipping time of Hanwoo in wild farms for a portable commercial device.
Full article
►▼
Show Figures
Open AccessArticle
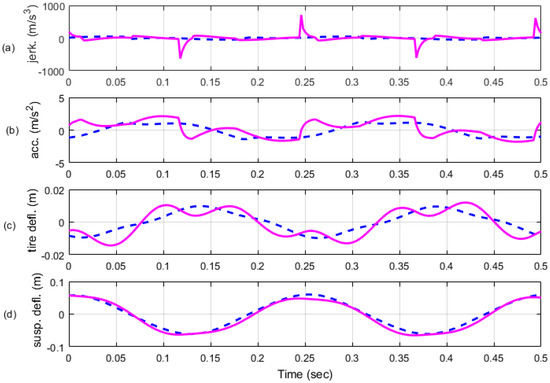
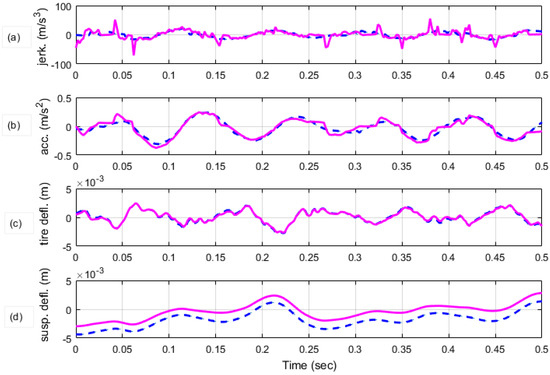
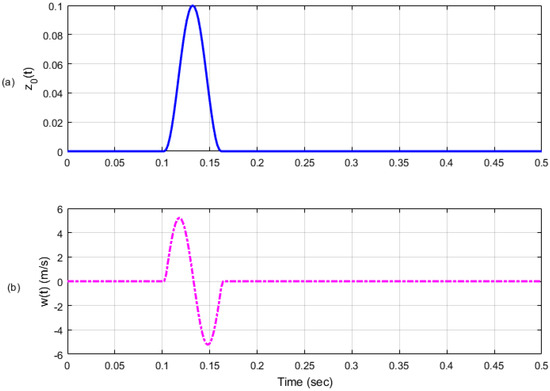
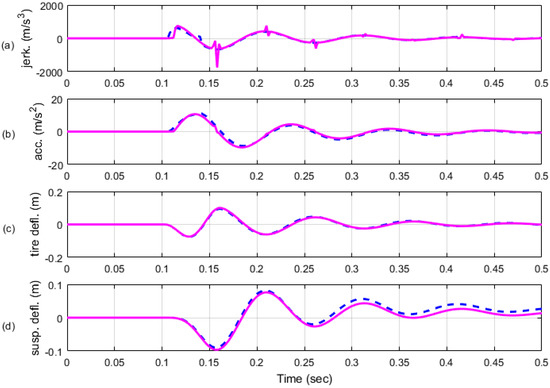
Anti-Jerk Optimal Preview Control Strategy to Enhance Performance of Active and Semi-Active Suspension Systems
by
Iljoong Youn and Ejaz Ahmad
Cited by 7 | Viewed by 2697
Abstract
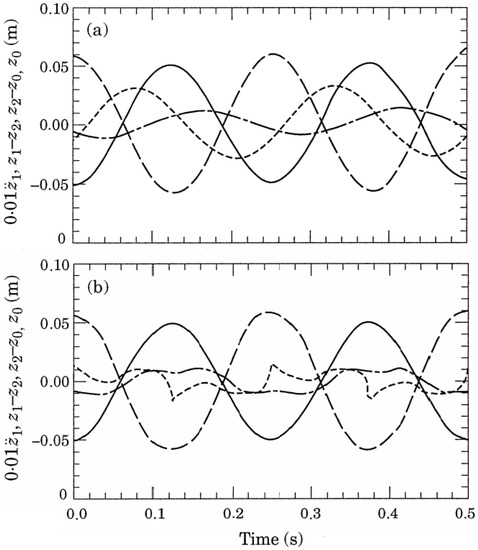
This study aims to demonstrate how to compute the damping coefficient of a continuously variable damper for semi-active preview control suspensions while considering the sprung-mass jerk and the controller’s performance advantage. Optimal control theory is used to derive and validate the proposed preview
[...] Read more.
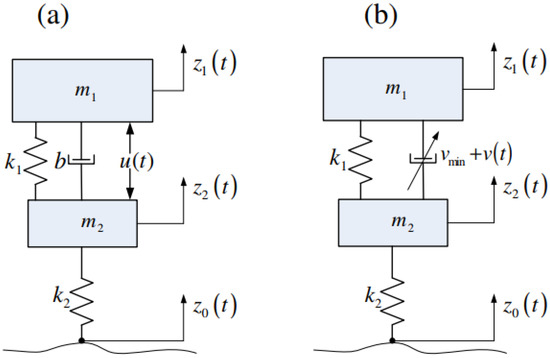
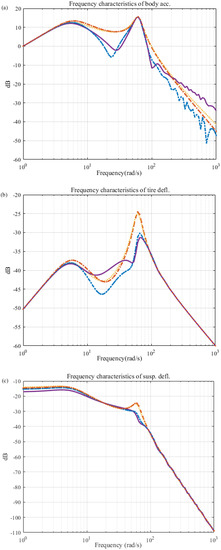
This study aims to demonstrate how to compute the damping coefficient of a continuously variable damper for semi-active preview control suspensions while considering the sprung-mass jerk and the controller’s performance advantage. Optimal control theory is used to derive and validate the proposed preview approach to future road disturbances. Despite reduced body acceleration, semi-active suspensions with preview control display an increase in body jerk, implying that ride comfort may not be improved in practice. The optimal preview jerk controller for a semi-active system, on the other hand, can improve ride comfort without degrading road holding by minimizing the performance index that comprises the RMS value of jerk in addition to the RMS values of other outputs. The anti-jerk preview control suspension simulations considering frequency characteristics reveal a difference between suspension systems that consider jerk and those that ignore jerk. The time-domain simulations suggest that the proposed preview control strategy effectively to reduce body jerk, which other controllers cannot.
Full article
►▼
Show Figures
Open AccessArticle
Combining Event-Based Maneuver Selection and MPC Based Trajectory Generation in Autonomous Driving
by
Ni Dang, Tim Brüdigam, Marion Leibold and Martin Buss
Cited by 3 | Viewed by 2361
Abstract
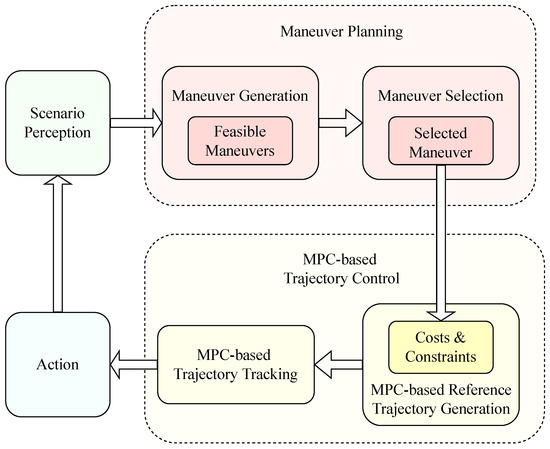
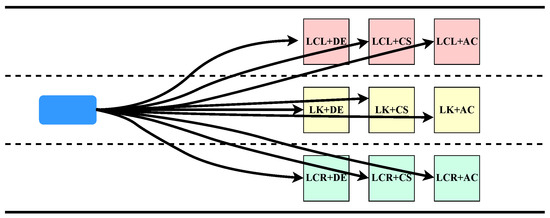
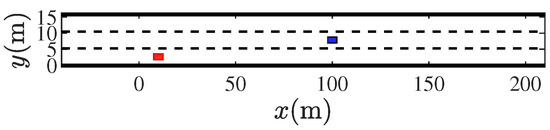
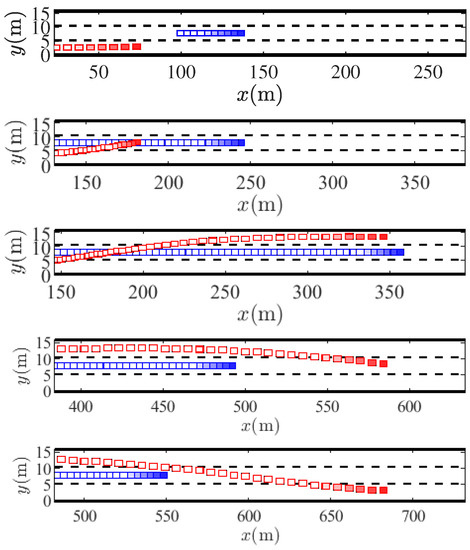
Maneuver planning, which plays a key role in selecting desired lanes and speeds, is an essential element of autonomous driving. Generally, for a vehicle driving on a multilane road, there are several potential maneuvers in both longitudinal and lateral directions. Selecting the best
[...] Read more.
Maneuver planning, which plays a key role in selecting desired lanes and speeds, is an essential element of autonomous driving. Generally, for a vehicle driving on a multilane road, there are several potential maneuvers in both longitudinal and lateral directions. Selecting the best maneuver from the various options represents a significant challenge. In this paper, we propose a maneuver selection algorithm and combine it with a trajectory generation algorithm, which is based on model predictive control (MPC). The maneuver selection method is a higher-level planner, which selects only one maneuver from all possible maneuvers based on the current situation and delivers it to a lower-level MPC-based trajectory tracking controller. The effectiveness of the proposed algorithm is validated by simulating an overtaking scenario on a multilane highway.
Full article
►▼
Show Figures
Open AccessArticle
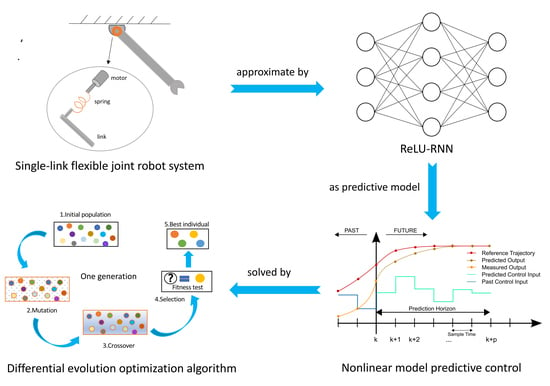
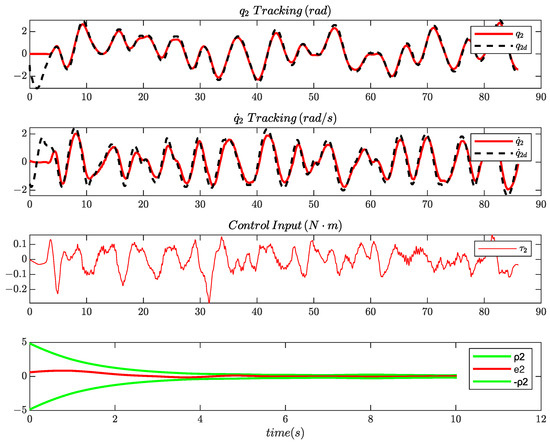
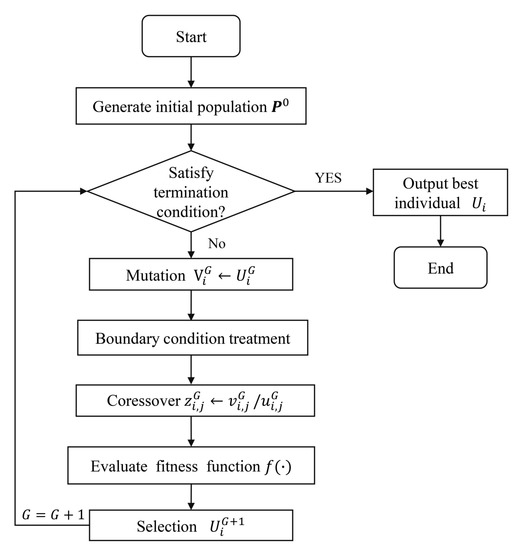
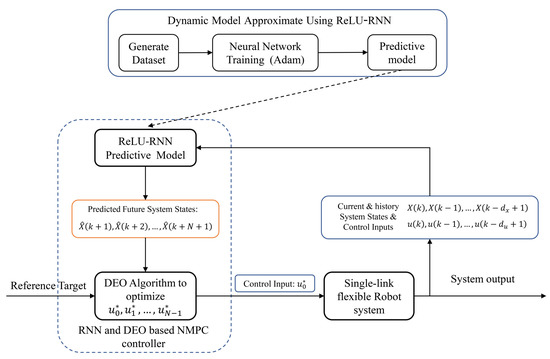
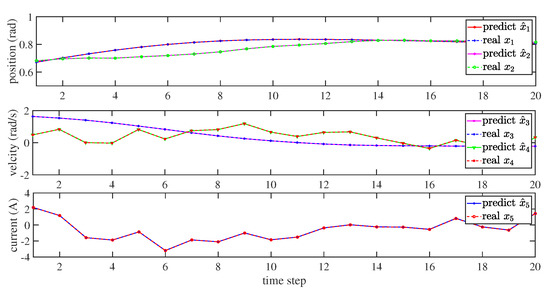
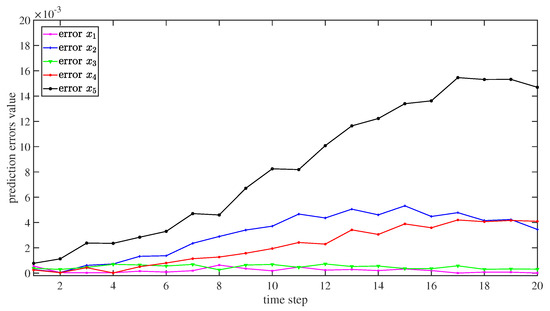
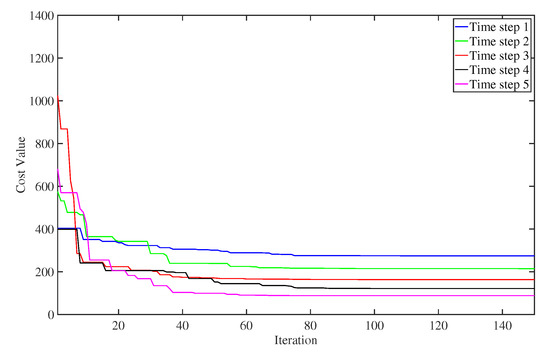
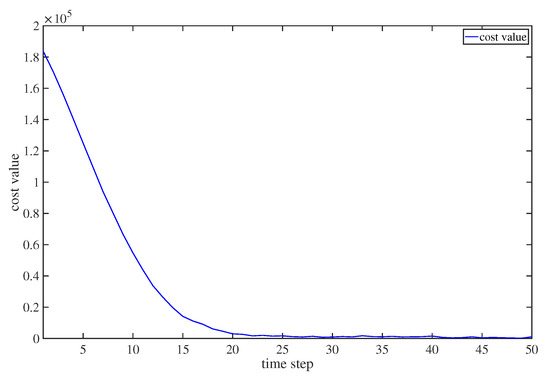
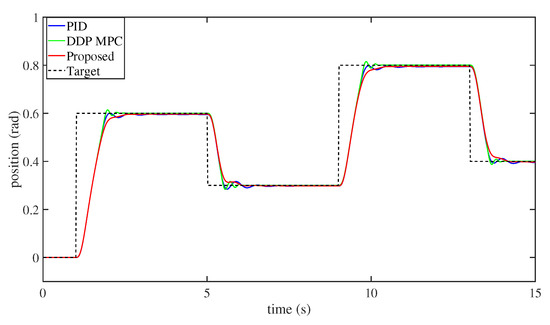
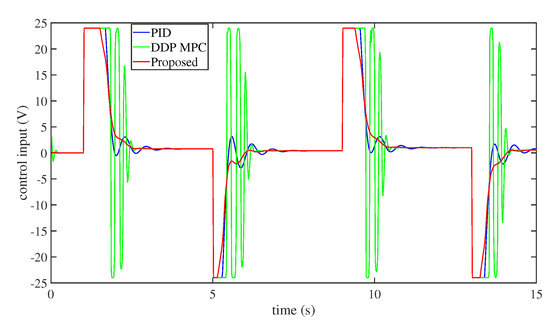
Nonlinear Model Predictive Control of Single-Link Flexible-Joint Robot Using Recurrent Neural Network and Differential Evolution Optimization
by
Anlong Zhang, Zhiyun Lin, Bo Wang and Zhimin Han
Cited by 14 | Viewed by 3444
Abstract
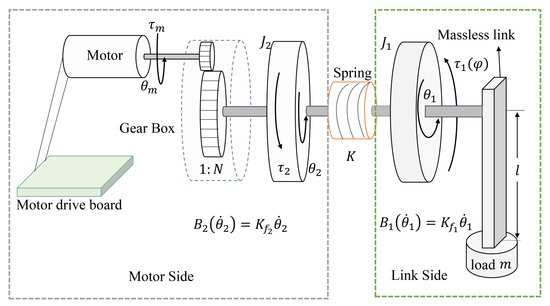
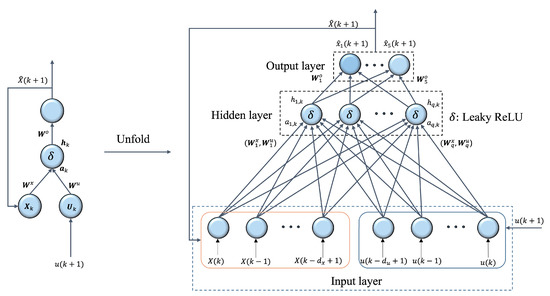
A recurrent neural network (RNN) and differential evolution optimization (DEO) based nonlinear model predictive control (NMPC) technique is proposed for position control of a single-link flexible-joint (FJ) robot. First, a simple three-layer recurrent neural network with rectified linear units as an activation function
[...] Read more.
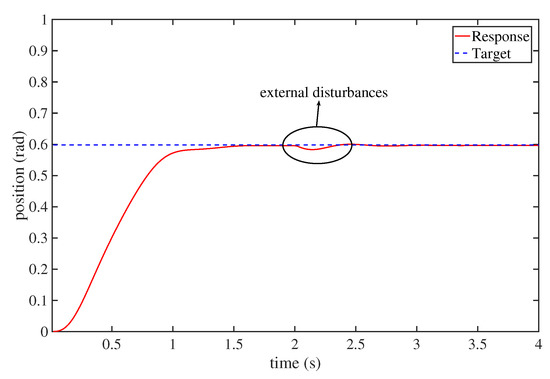
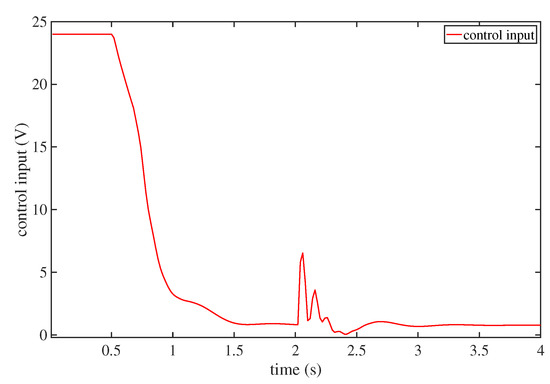
A recurrent neural network (RNN) and differential evolution optimization (DEO) based nonlinear model predictive control (NMPC) technique is proposed for position control of a single-link flexible-joint (FJ) robot. First, a simple three-layer recurrent neural network with rectified linear units as an activation function (ReLU-RNN) is employed for approximating the system dynamic model. Then, using the RNN predictive model and model predictive control (MPC) scheme, an RNN and DEO based NMPC controller is designed, and the DEO algorithm is used to solve the controller. Finally, comparing numerical simulation findings demonstrates the efficiency and performance of the proposed approach. The merit of this method is that not only is the control precision satisfied, but also the overshoots and the residual vibration are well suppressed.
Full article
►▼
Show Figures
Open AccessArticle
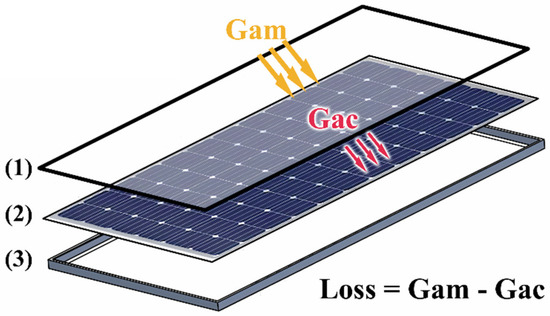
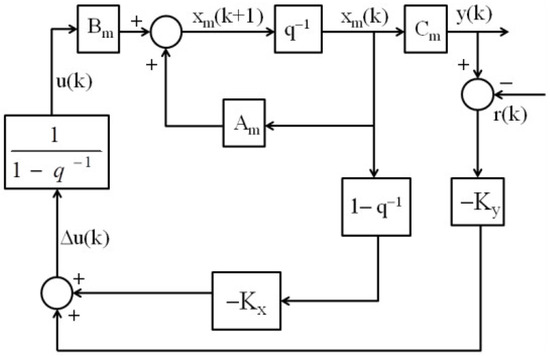
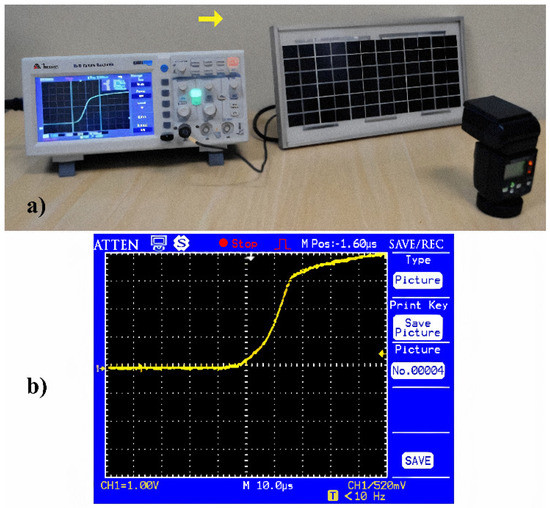
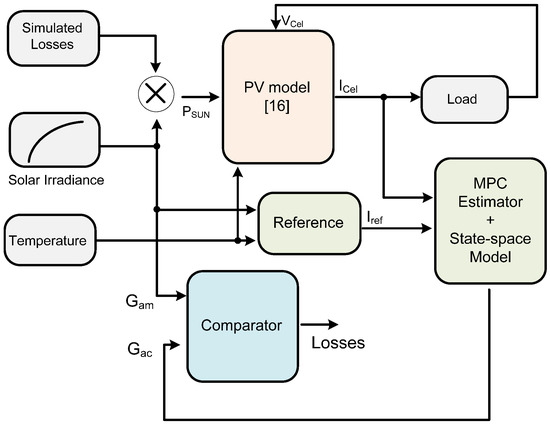
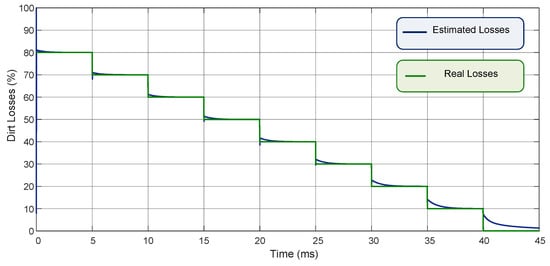
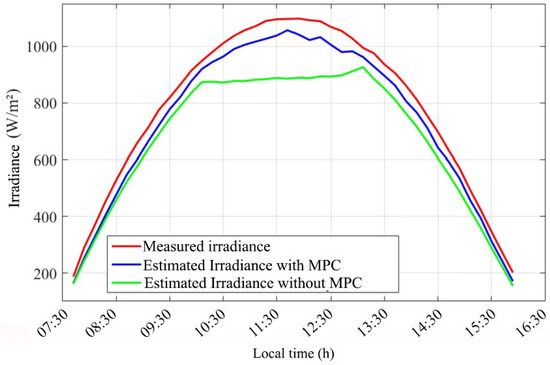
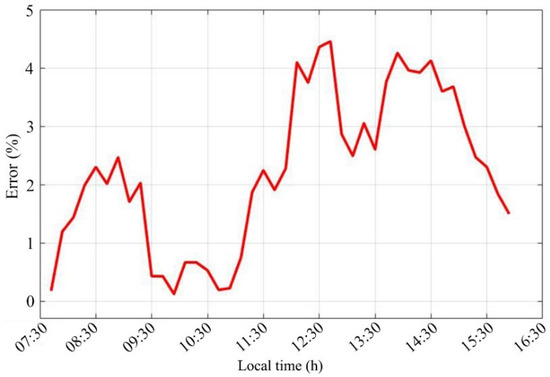
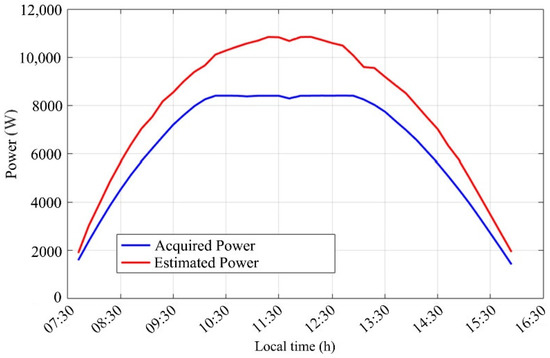
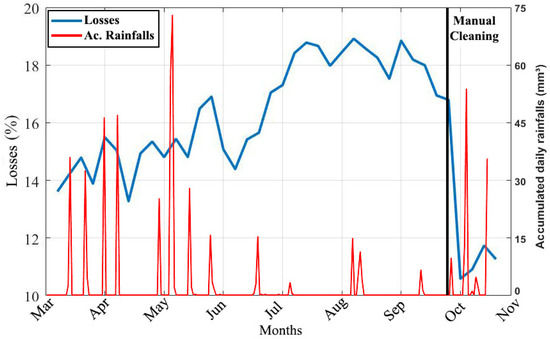
Dirt Loss Estimator for Photovoltaic Modules Using Model Predictive Control
by
Ricardo R. Santos, Edson A. Batista, Moacyr A. G. de Brito and David D. D. Quinelato
Cited by 4 | Viewed by 2099
Abstract
The central problem tackled in this article is the susceptibility of the solar modules to dirt that culminates in losses in energy generation or even physical damage. In this context, a solution is presented to enable the estimates of dirt losses in photovoltaic
[...] Read more.
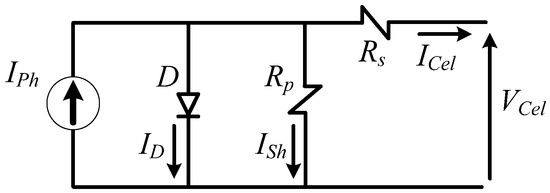
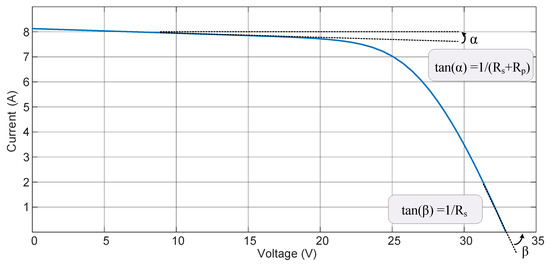
The central problem tackled in this article is the susceptibility of the solar modules to dirt that culminates in losses in energy generation or even physical damage. In this context, a solution is presented to enable the estimates of dirt losses in photovoltaic generation units. The proposed solution is based on the mathematical modeling of the solar cells and predictive modeling concepts. A device was designed and developed to acquire data from the photovoltaic unit; process them based on a predictive model, and send loss estimates in the generation unit to a web server to help in decision-making support. The results demonstrated the real applicability of the system to estimate losses due to dirt or electrical mismatches in photovoltaic plants.
Full article
►▼
Show Figures
Open AccessArticle
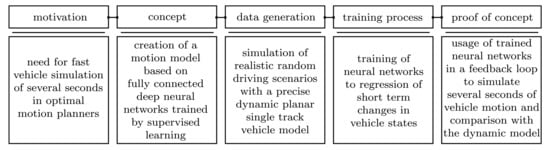
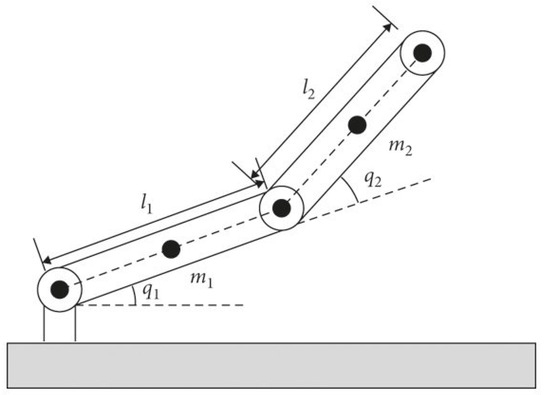
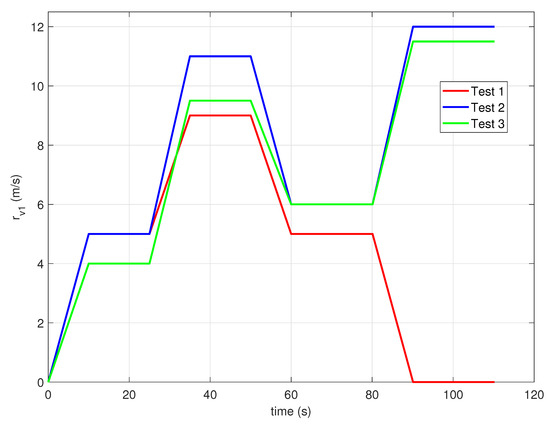
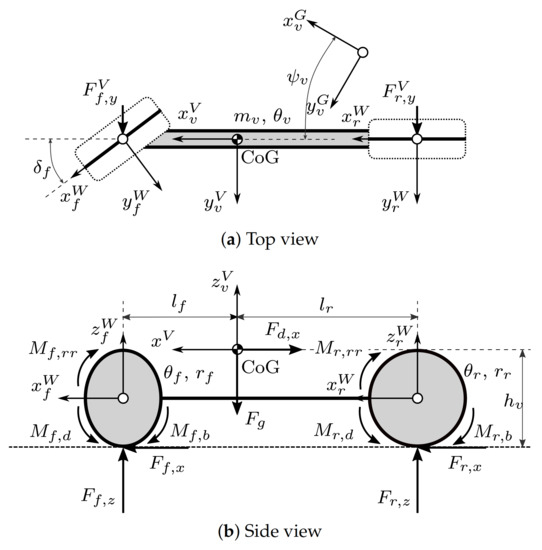
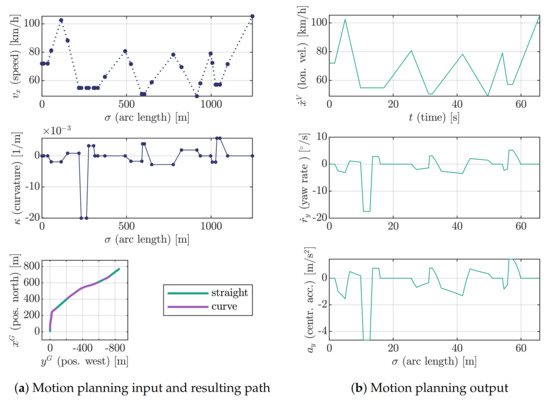
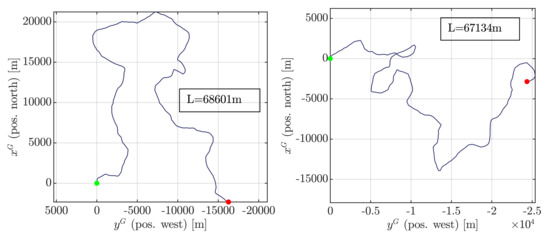
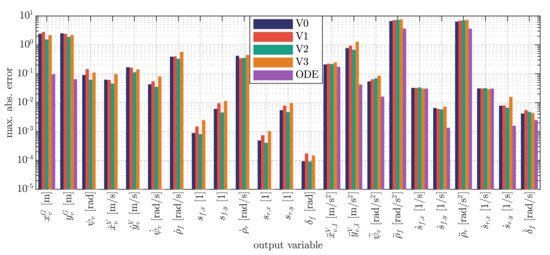
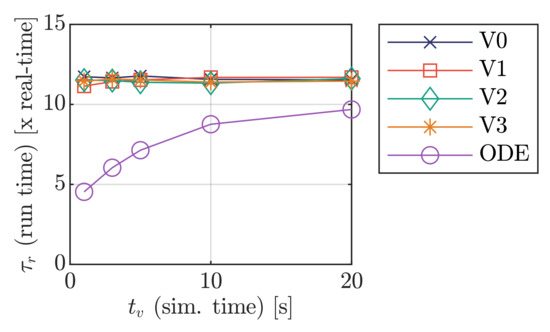
Fast Motion Model of Road Vehicles with Artificial Neural Networks
by
Ferenc Hegedüs, Péter Gáspár and Tamás Bécsi
Cited by 6 | Viewed by 3387
Abstract
Nonlinear optimization-based motion planning algorithms have been successfully used for dynamically feasible trajectory planning of road vehicles. However, the main drawback of these methods is their significant computational effort and thus high runtime, which makes real-time application a complex problem. Addressing this field,
[...] Read more.
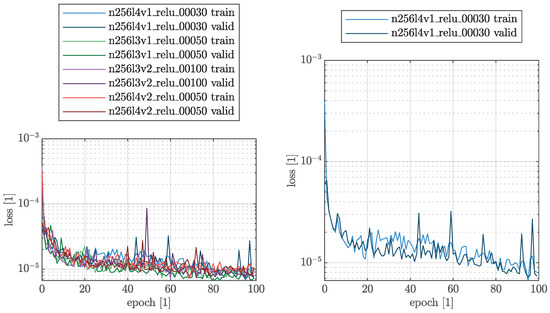
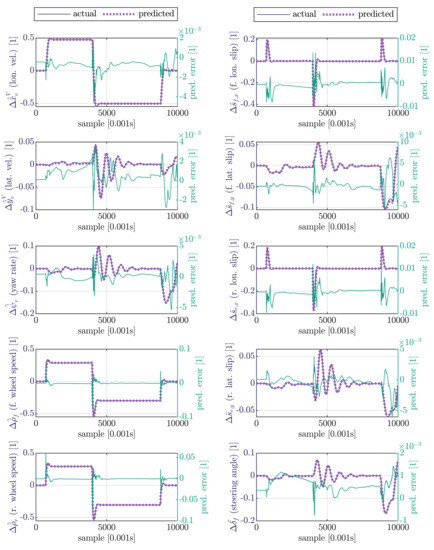
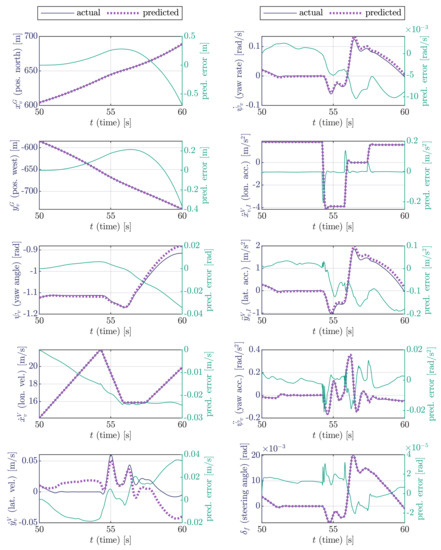
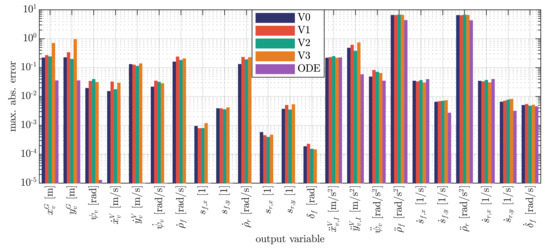
Nonlinear optimization-based motion planning algorithms have been successfully used for dynamically feasible trajectory planning of road vehicles. However, the main drawback of these methods is their significant computational effort and thus high runtime, which makes real-time application a complex problem. Addressing this field, this paper proposes an algorithm for fast simulation of road vehicle motion based on artificial neural networks that can be used in optimization-based trajectory planners. The neural networks are trained with supervised learning techniques to predict the future state of the vehicle based on its current state and driving inputs. Learning data is provided for a wide variety of randomly generated driving scenarios by simulation of a dynamic vehicle model. The realistic random driving maneuvers are created on the basis of piecewise linear travel velocity and road curvature profiles that are used for the planning of public roads. The trained neural networks are then used in a feedback loop with several variables being calculated by additional numerical integration to provide all the outputs of the original dynamic model. The presented model can be capable of short-term vehicle motion simulation with sufficient precision while having a considerably faster runtime than the original dynamic model.
Full article
►▼
Show Figures







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}