Sensors and Actuators for Intelligent Vehicles
A topical collection in Sensors (ISSN 1424-8220). This collection belongs to the section "Vehicular Sensing".
Viewed by 21458
Share This Topical Collection
Editors
 Dr. Adam Idzkowski
Dr. Adam Idzkowski
Dr. Adam Idzkowski
E-Mail
Website
Collection Editor
Department of Electrical Engineering, Bialystok University of Technology, 15-351 Bialystok, Poland
Interests: robotic sensors; applications of sensors in transportation; wireless sensor networks; signal processing; renewable energy; energy harvesting; metrology; measurement uncertainty
Special Issues, Collections and Topics in MDPI journals
 Prof. Dr. Vytautas Bucinskas
Prof. Dr. Vytautas Bucinskas
Prof. Dr. Vytautas Bucinskas
E-Mail
Website
Collection Editor
Department of Mechatronics, Robotics, and Digital Manufacturing, Vilnius Gediminas Technical University, LT-10105 Vilnius, Lithuania
Interests: biodegradable material; fexible strain sensors; robotic process automation; artificial intelligence in robotics; virtual and augmented reality in industry; smart sensors and systems
Special Issues, Collections and Topics in MDPI journals
 Dr. Damian Grzechca
Dr. Damian Grzechca
Dr. Damian Grzechca
E-Mail
Website
Collection Editor
Department of Electronics, Electrical Engineering and Microelectronics, Faculty of Automatic Control, Electronics and Computer Science, Silesian University of Technology, 16 Akademicka Street, 44-100 Gliwice, Poland
Interests: predictive maintenance of electronic sensors/systems; failure analysis; ADAS methodology; signal processing and data analysis; positioning and localization systems
Special Issues, Collections and Topics in MDPI journals
 Prof. Dr. Reza Malekian
Prof. Dr. Reza Malekian
Prof. Dr. Reza Malekian
E-Mail
Website
Collection Editor
Department of Computer Science and Media Technology, Malmö University, SE-211 19 Malmö, Sweden
Interests: Internet of things; connectivity; advanced sensor networks; intelligent transportation systems; vehicular networks
Special Issues, Collections and Topics in MDPI journals
 Dr. Andrius Dzedzickis
Dr. Andrius Dzedzickis
Dr. Andrius Dzedzickis
E-Mail
Website
Collection Editor
Department of Mechatronics, Robotics, and Digital Manufacturing, Vilnius Gediminas Technical University, LT-10105 Vilnius, Lithuania
Interests: robotic process automation; artificial intelligence in robotics; virtual and augmented reality in industry; digital twins of industrial systems
Special Issues, Collections and Topics in MDPI journals
Topical Collection Information
Dear Colleagues,
The aim of this topical collection is to contribute to the state of the art and to introduce current developments concerning modern vehicles, i.e., sensors and actuators, as well as applications in measuring and automation control systems, power management systems, and artificial intelligence-based systems. We encourage potential authors to submit contributions of original research, novel developments, and substantial experimental works concerning intelligent vehicles.
Possible topics include (but are not limited to):
- Robotic and automotive sensors
- External sensors (radar, LiDAR, camera) and information fusion
- Sensor technologies for Intelligent Transportation Systems
- Sensing systems for traffic monitoring
- Advanced driver-assistance systems (ADAS)
- Predictive maintenance of vehicles in smart cities
- Artificial intelligence and autonomous vehicles
- Intelligent systems in agricultural vehicles and machinery
- Energy harvesting for automotive applications
- Vehicle vibration measurement and analysis
Dr. Adam Idzkowski
Prof. Dr. Vytautas Bucinskas
Dr. Damian Grzechca
Prof. Dr. Reza Malekian
Dr. Andrius Dzedzickis
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Sensors is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2600 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- vehicle
- control systems
- power systems
- energy harvesting
- robotic vehicles
- road vehicles
- agricultural vehicles
- autonomous vehicles
- multisensor data fusion
- artificial intelligence
- machine learning
- ADAS
- vibration analysis
Published Papers (7 papers)
Open AccessArticle
Validation of Multi-Frequency Inductive-Loop Measurement System for Parameters of Moving Vehicle Based on Laboratory Model
by
Zbigniew Marszalek and Krzysztof Duda
Viewed by 720
Abstract
The paper presents research on a system for measuring the parameters of a vehicle in motion and the process of validating it under laboratory conditions. The measurement system uses four inductive-loop (IL) sensors, two slim ILs and two wide ILs. The vehicle speed,
[...] Read more.
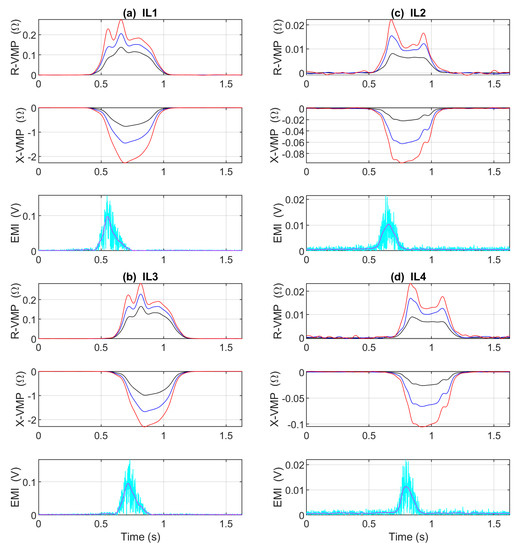
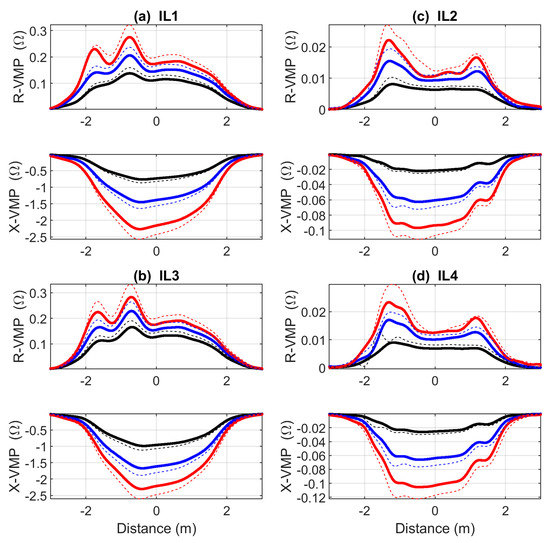
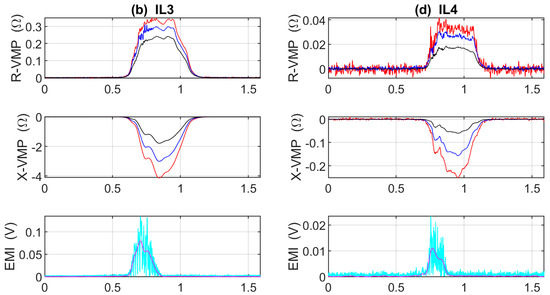
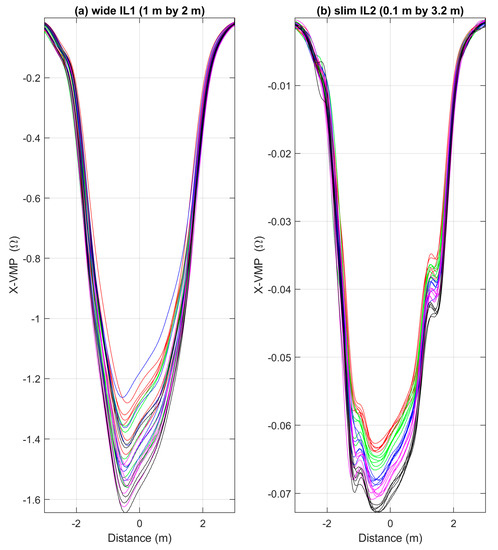
The paper presents research on a system for measuring the parameters of a vehicle in motion and the process of validating it under laboratory conditions. The measurement system uses four inductive-loop (IL) sensors, two slim ILs and two wide ILs. The vehicle speed, wheelbase, length, and overhangs are all determined on the basis of a vehicle magnetic profile (VMP) waveform. VMPs are captured from the continuous IL-based impedance measurement. The impedance measurement for a single IL is performed simultaneously at three carrier frequencies. The uncontrolled measurement conditions in the field on a real road test bed (RTB), including the speed of passing vehicles, motivated the development of a laboratory test bed (LTB). This LTB serves as a model of an existing measurement setup installed on the road, i.e., the RTB. The LTB includes IL sensors and a movable model of the vehicle made in 1:50 scale. The LTB enables validation of the whole measurement system in the vehicle speed range from 10 km/h up to 150 km/h in 5 km/h increments in fully controlled conditions. The measurement results are presented in the distance domain, calculated from the VMPs and the measured speed. The largest errors in estimating vehicle-model body parameters, on a natural scale, do not exceed 4.3 cm.
Full article
►▼
Show Figures
Open AccessArticle
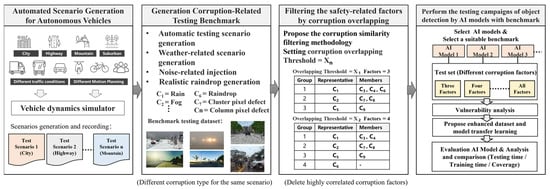
Development of an Effective Corruption-Related Scenario-Based Testing Approach for Robustness Verification and Enhancement of Perception Systems in Autonomous Driving
by
Huang Hsiang and Yung-Yuan Chen
Viewed by 1644
Abstract
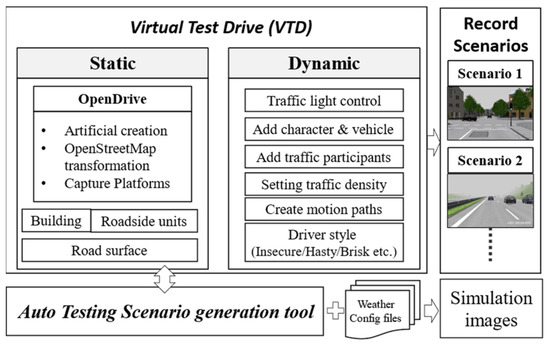
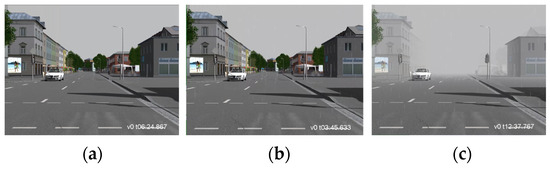
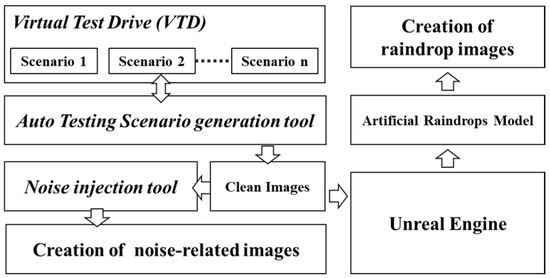
Given that sensor-based perception systems are utilized in autonomous vehicle applications, it is essential to validate such systems to ensure their robustness before they are deployed. In this study, we propose a comprehensive simulation-based process to verify and enhance the robustness of sensor-based
[...] Read more.
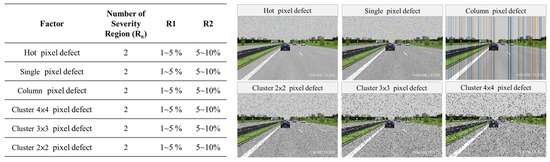
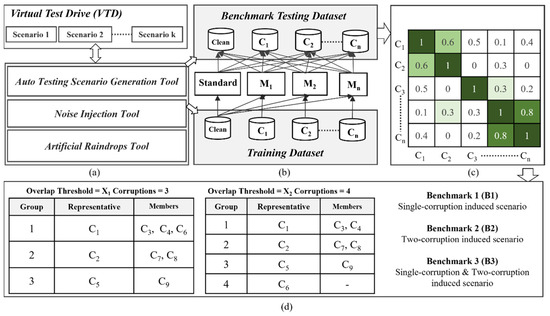
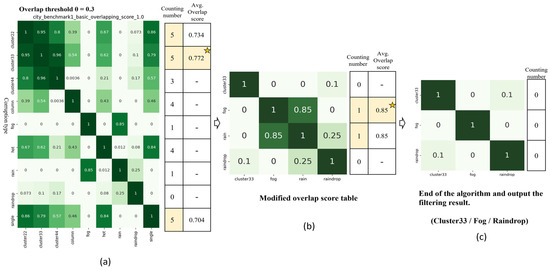
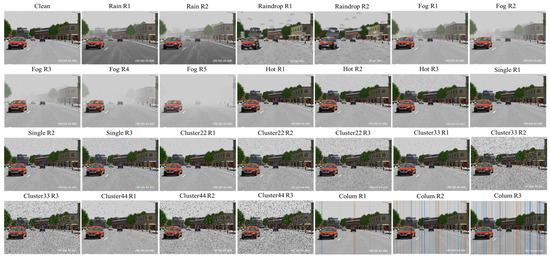
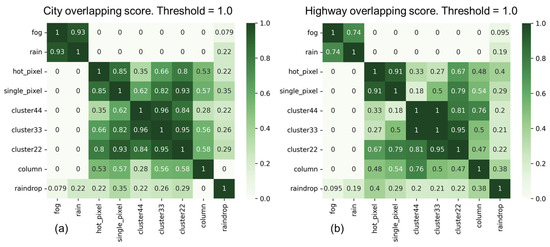
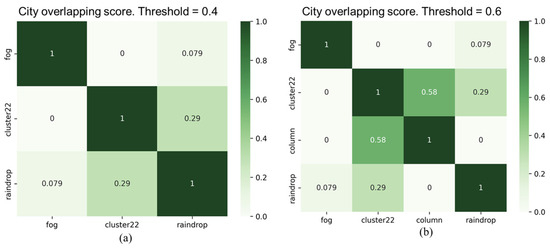
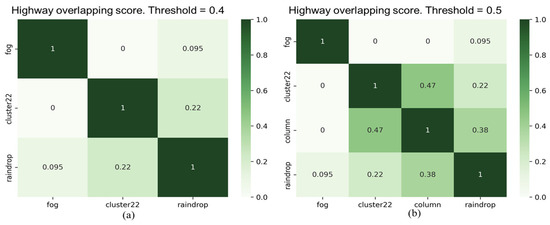
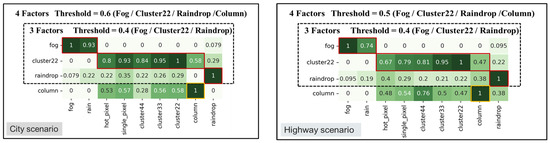
Given that sensor-based perception systems are utilized in autonomous vehicle applications, it is essential to validate such systems to ensure their robustness before they are deployed. In this study, we propose a comprehensive simulation-based process to verify and enhance the robustness of sensor-based perception systems in relation to corruption. Firstly, we introduce a methodology and scenario-based corruption generation tool for creating a variety of simulated test scenarios. These scenarios can effectively mimic real-world traffic environments, with a focus on corruption types that are related to safety concerns. An effective corruption similarity filtering algorithm is then proposed to eliminate corruption types with high similarity and identify representative corruption types that encompass all considered corruption types. As a result, we can create efficient test scenarios for corruption-related robustness with reduced testing time and comprehensive scenario coverage. Subsequently, we conduct vulnerability analysis on object detection models to identify weaknesses and create an effective training dataset for enhancing model vulnerability. This improves the object detection models’ tolerance to weather and noise-related corruptions, ultimately enhancing the robustness of the perception system. We use case studies to demonstrate the feasibility and effectiveness of the proposed procedures for verifying and enhancing robustness. Furthermore, we investigate the impact of various “similarity overlap threshold” parameter settings on scenario coverage, effectiveness, scenario complexity (size of training and testing datasets), and time costs.
Full article
►▼
Show Figures
Open AccessArticle
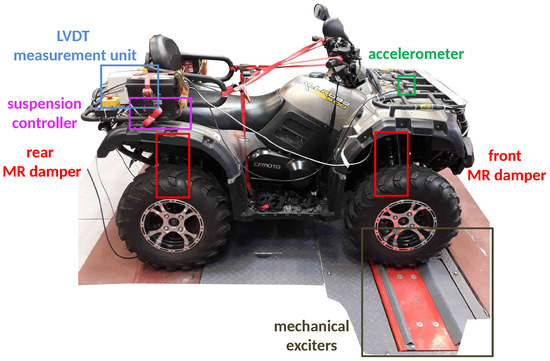
Identification of Control-Related Signal Path for Semi-Active Vehicle Suspension with Magnetorheological Dampers
by
Piotr Krauze
Cited by 3 | Viewed by 2381
Abstract
This paper presents a method for the identification of control-related signal paths dedicated to a semi-active suspension with MR (magnetorheological) dampers, which are installed in place of standard shock absorbers. The main challenge comes from the fact that the semi-active suspension needs to
[...] Read more.
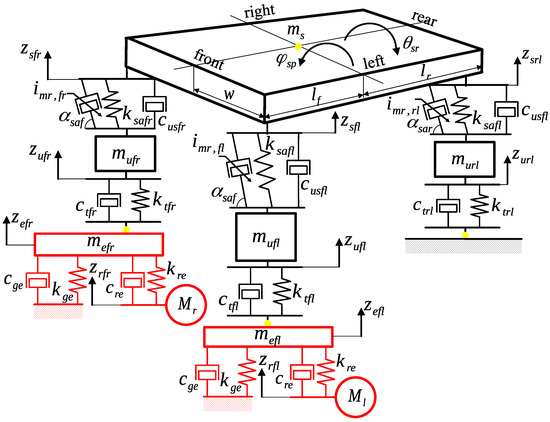
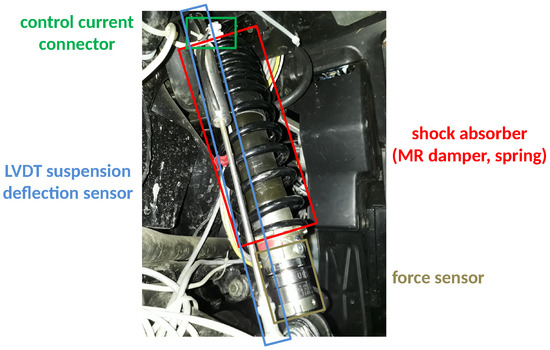
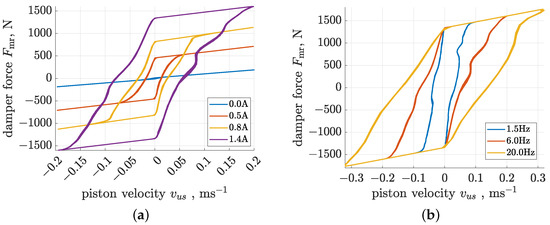
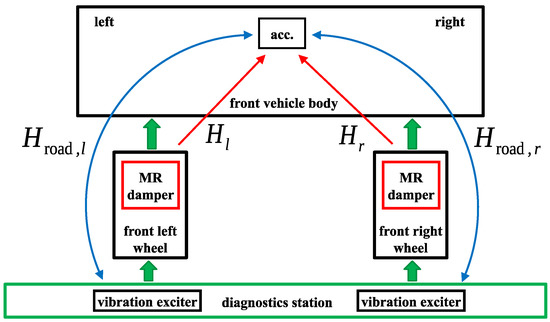
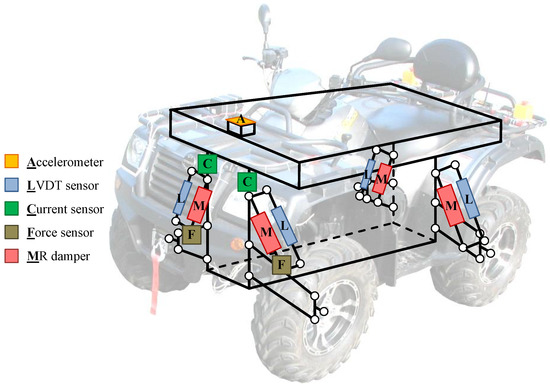
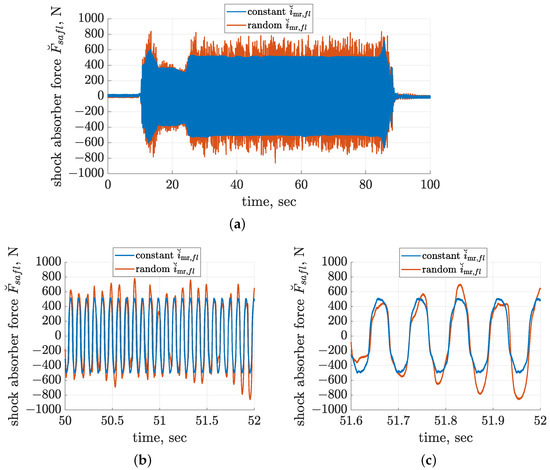
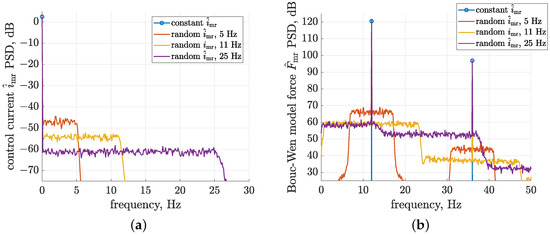
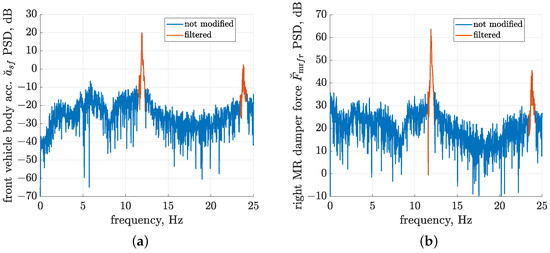
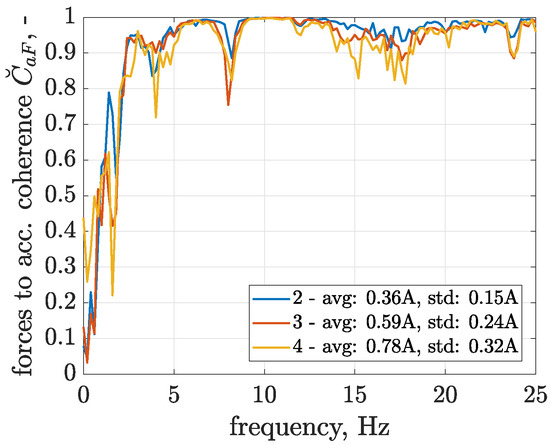
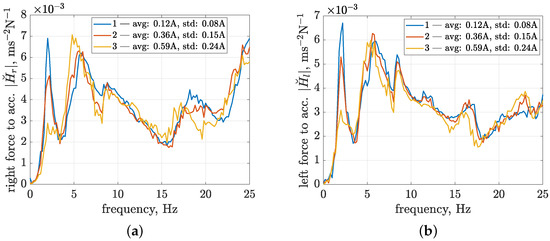
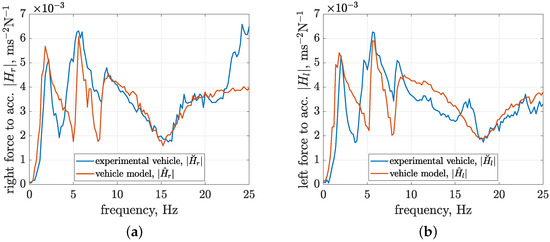
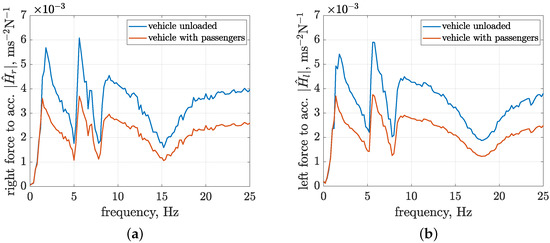
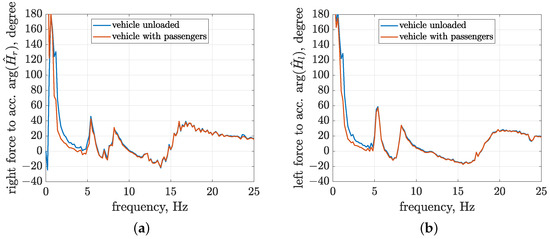
This paper presents a method for the identification of control-related signal paths dedicated to a semi-active suspension with MR (magnetorheological) dampers, which are installed in place of standard shock absorbers. The main challenge comes from the fact that the semi-active suspension needs to be simultaneously subjected to road-induced excitation and electric currents supplied to the suspension MR dampers, while a response signal needs to be decomposed into road-related and control-related components. During experiments, the front wheels of an all-terrain vehicle were subjected to sinusoidal vibration excitation at a frequency equal to 12 Hz using a dedicated diagnostic station and specialised mechanical exciters. The harmonic type of road-related excitation allowed for its straightforward filtering from identification signals. Additionally, front suspension MR dampers were controlled using a wideband random signal with a 25 Hz bandwidth, different realisations, and several configurations, which differed in the average values and deviations of control currents. The simultaneous control of the right and left suspension MR dampers made it necessary to decompose the vehicle vibration response, i.e., the front vehicle body acceleration signal, into components related to the forces generated by different MR dampers. Measurement signals used for identification were taken from numerous sensors available in the vehicle, e.g., accelerometers, suspension force and deflection sensors, and sensors of electric currents, which control the instantaneous damping parameters of MR dampers. The final identification was carried out for control-related models evaluated in the frequency domain and revealed several resonances of the vehicle response and their dependence on the configurations of control currents. In addition, the parameters of the vehicle model with MR dampers and the diagnostic station were estimated based on the identification results. The analysis of the simulation results of the implemented vehicle model carried out in the frequency domain showed the influence of the vehicle load on the absolute values and phase shifts of control-related signal paths. The potential future application of the identified models lies in the synthesis and implementation of adaptive suspension control algorithms such as FxLMS (filtered-x least mean square). Adaptive vehicle suspensions are especially preferred for their ability to quickly adapt to varying road conditions and vehicle parameters.
Full article
►▼
Show Figures
Open AccessArticle
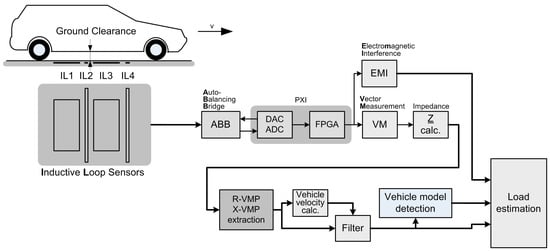
Load Estimation of Moving Passenger Cars Using Inductive-Loop Technology
by
Zbigniew Marszalek, Krzysztof Duda, Piotr Piwowar, Marek Stencel, Tadeusz Zeglen and Jacek Izydorczyk
Cited by 4 | Viewed by 2145
Abstract
Due to their lack of driving controllability, overweight vehicles are a big threat to road safety. The proposed method for a moving passenger car load estimation is capable of detecting an overweight vehicle, and thus it finds its application in road safety improvement.
[...] Read more.
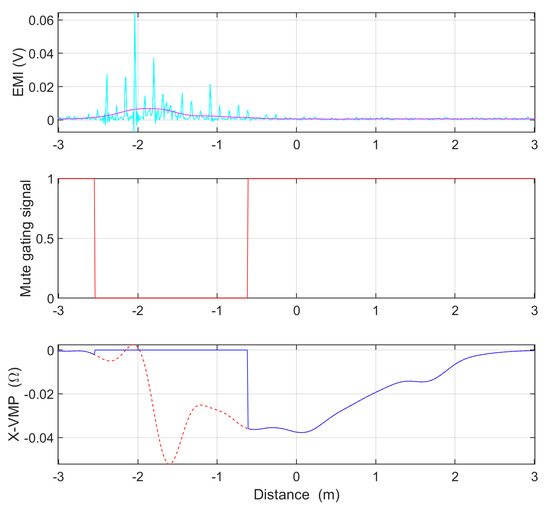
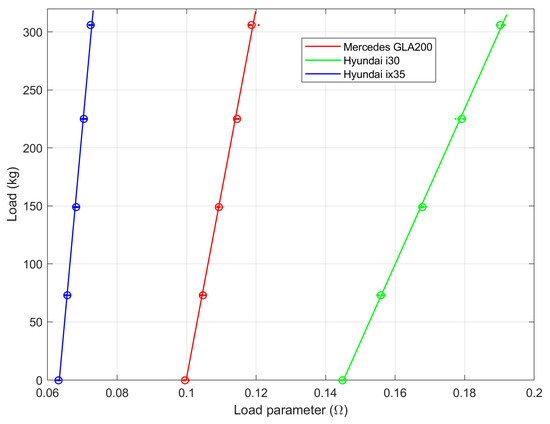
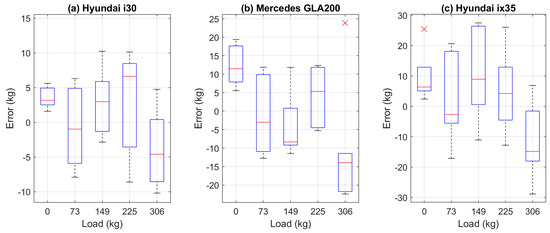
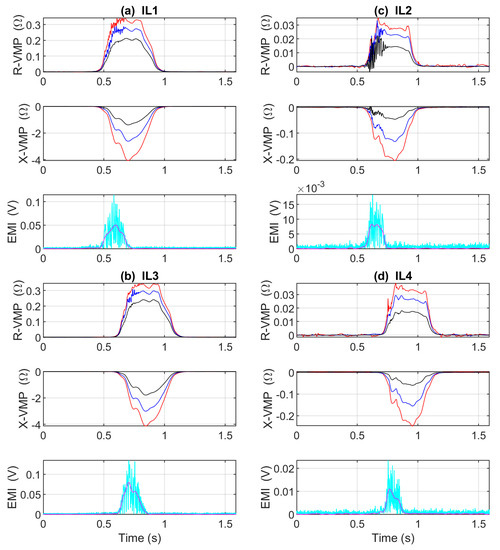
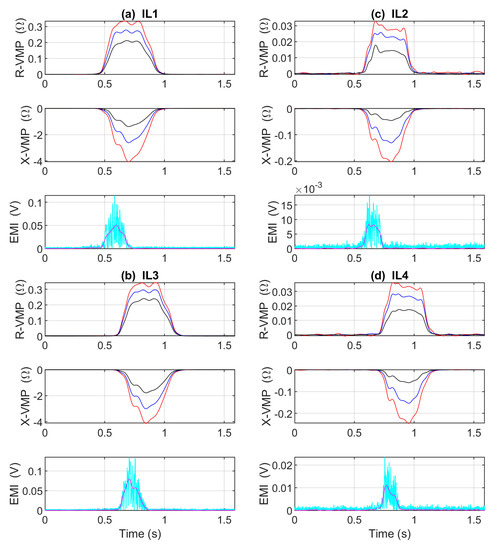
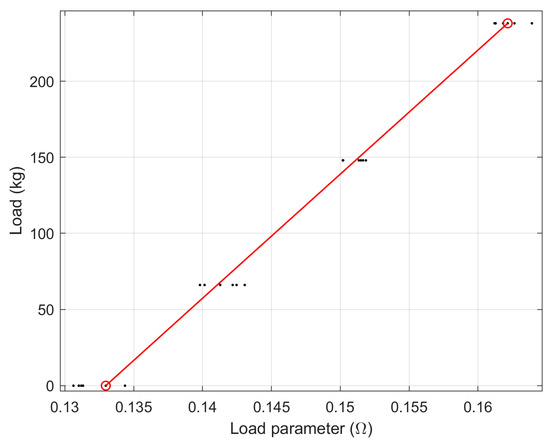
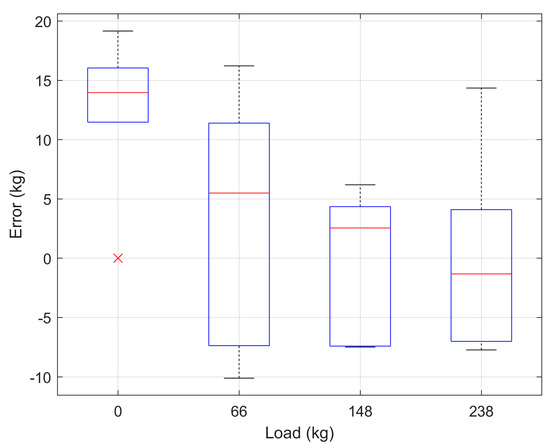
Due to their lack of driving controllability, overweight vehicles are a big threat to road safety. The proposed method for a moving passenger car load estimation is capable of detecting an overweight vehicle, and thus it finds its application in road safety improvement. The weight of a car’s load entering or leaving a considered zone, e.g., industrial facility, a state, etc., is also of concern in many applications, e.g., surveillance. Dedicated vehicle weight-in-motion measurement systems generally use expensive load sensors that also require deep intervention in the road while being installed and also are calibrated only for heavy trucks. In this paper, a vehicle magnetic profile (VMP) is used for defining a load parameter proportional to the passenger vehicle load. The usefulness of the proposed load parameter is experimentally demonstrated in field tests. The sensitivity of the VMP to the load change results from the fact that the higher load decreases the vehicle clearance value which in turn increases the VMP. It is also shown that a slim inductive-loop sensors allows the building of a load estimation system, with a maximum error around 30 kg, which allows approximate determination of the number of passengers in the car. The presented proof of concept extends the functionality of inductive loops, already installed in the road, for acquiring other traffic parameters, e.g., moving vehicle axle-to-axle distance measurement, to road safety and surveillance related applications.
Full article
►▼
Show Figures
Open AccessArticle
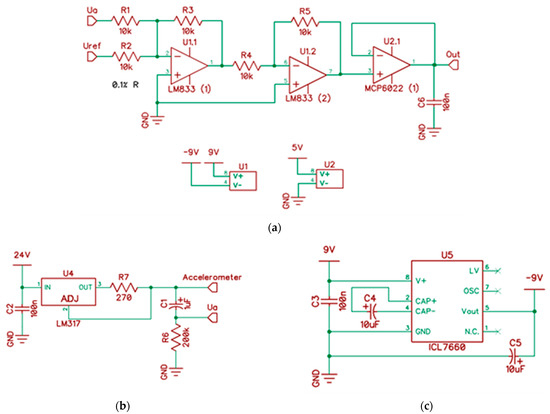
Design and Evaluation of Low-Cost Vibration-Based Machine Monitoring System for Hay Rotary Tedder
by
Arkadiusz Mystkowski, Rafał Kociszewski, Adam Kotowski, Maciej Ciężkowski, Wojciech Wojtkowski, Michał Ostaszewski, Zbigniew Kulesza, Adam Wolniakowski, Grzegorz Kraszewski and Adam Idzkowski
Cited by 11 | Viewed by 3940
Abstract
Vibration monitoring provides a good-quality source of information about the health condition of machines, and it is often based on the use of accelerometers. This article focuses on the use of accelerometer sensors in fabricating a low-cost system for monitoring vibrations in agricultural
[...] Read more.
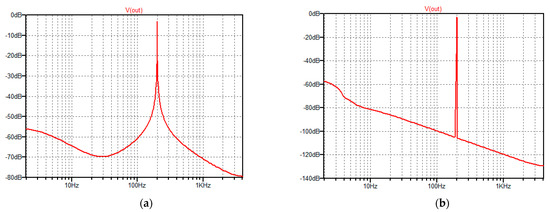
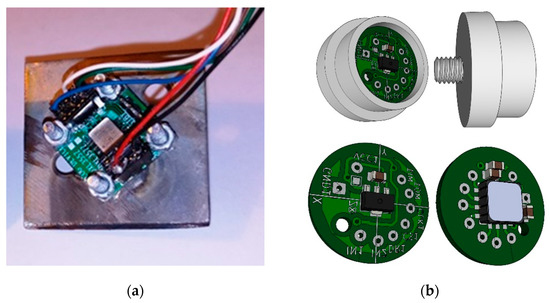
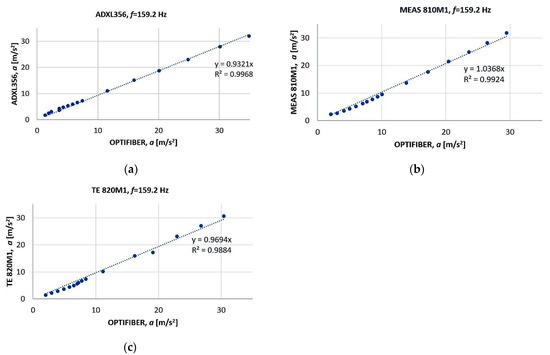
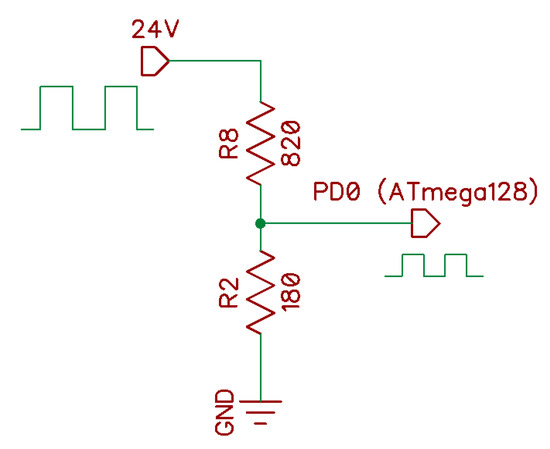
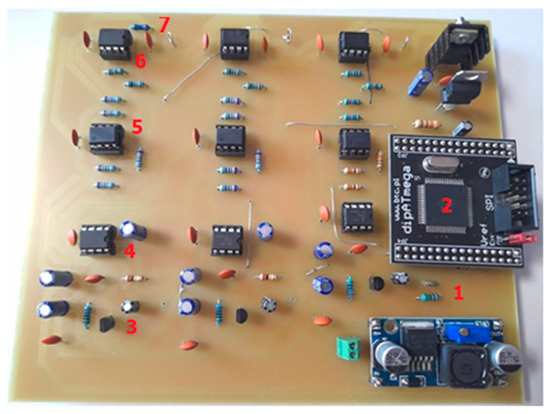
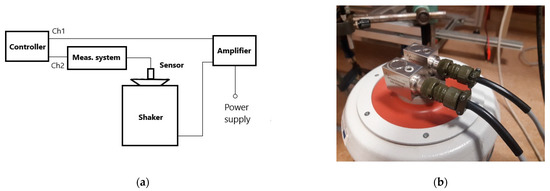
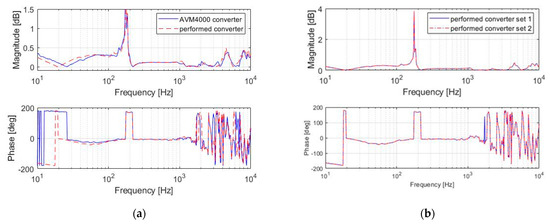
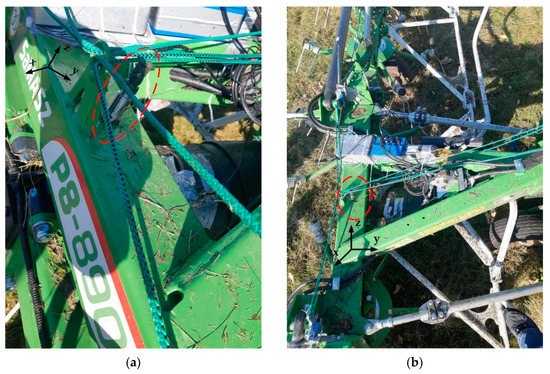
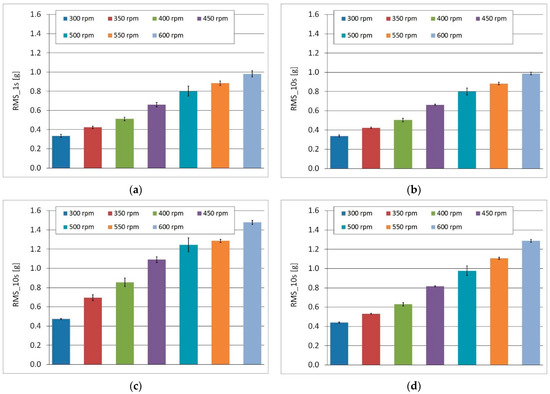
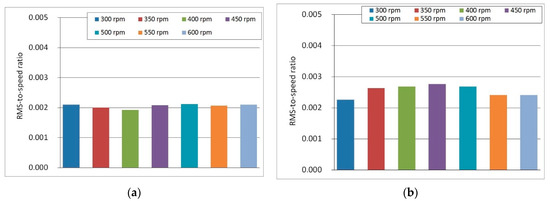
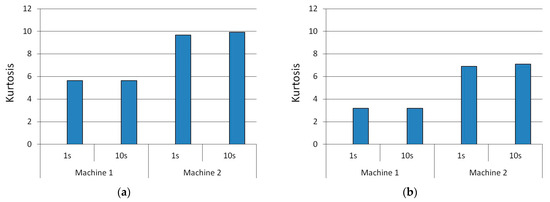
Vibration monitoring provides a good-quality source of information about the health condition of machines, and it is often based on the use of accelerometers. This article focuses on the use of accelerometer sensors in fabricating a low-cost system for monitoring vibrations in agricultural machines, such as rotary tedders. The aim of the study is to provide useful data on equipment health for improving the durability of such machinery. The electronic prototype, based on the low-cost AVR microcontroller ATmega128 with 10-bit ADC performing a 12-bit measurement, is able to acquire data from an accelerometer weighing up to 10 g. Three sensors were exposed to low accelerations with the use of an exciter, and their static characteristics were presented. Standard experimental tests were used to evaluate the constructed machine monitoring system. The self-contained prototype system was calibrated in a laboratory test rig, and sinusoidal and multisinusoidal excitations were used. Measurements in time and frequency domains were carried out. The amplitude characteristic of the preformed system differed by no more than 15% within a frequency range of 10 Hz–10 kHz, compared to the AVM4000 commercial product. Finally, the system was experimentally tested to measure acceleration at three characteristic points in a rotational tedder, i.e., the solid grease gearbox, the drive shaft bearing and the main frame. The RMS amplitude values of the shaft vibrations on the bearing in relation to the change in the drive shaft speed of two tedders of the same type were evaluated and compared. Additionally, the parameters of kurtosis and crest factor were compared to ascertain the bearing condition.
Full article
►▼
Show Figures
Open AccessArticle
Research on Clamping Force Control of CVT for Electric Vehicles Based on Slip Characteristics
by
Bing Fu, Taiping Zhu, Jingang Liu and Xiaolan Hu
Cited by 4 | Viewed by 6068
Abstract
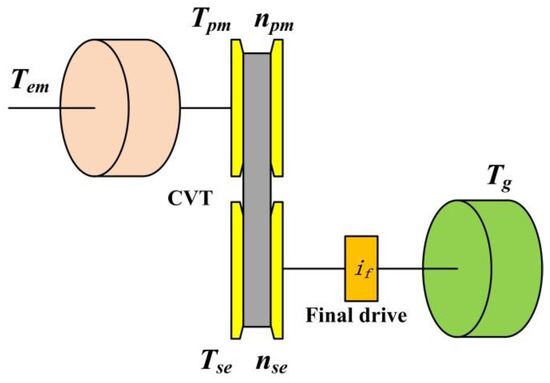
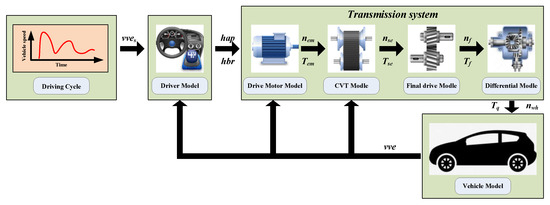
The low mechanical efficiency of metal belt’s continuously variable transmission (CVT) limits its application in new energy vehicles. To further improve CVT efficiency and reduce the energy consumption of electric vehicles (EVs) with CVT, this paper proposes a pure electric CVT configuration and
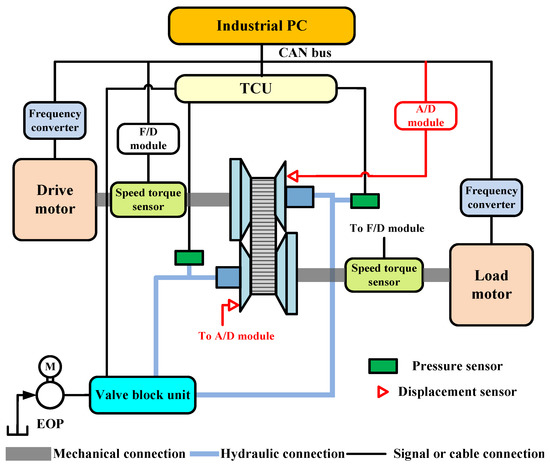
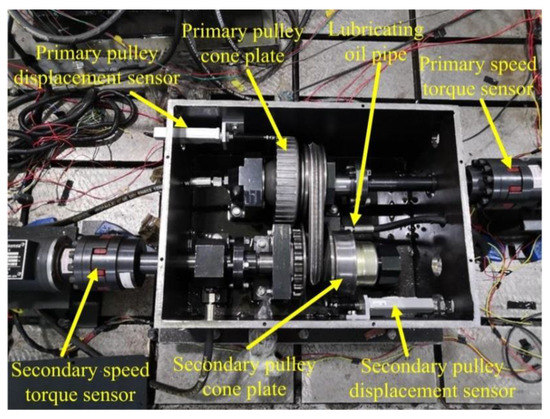
[...] Read more.
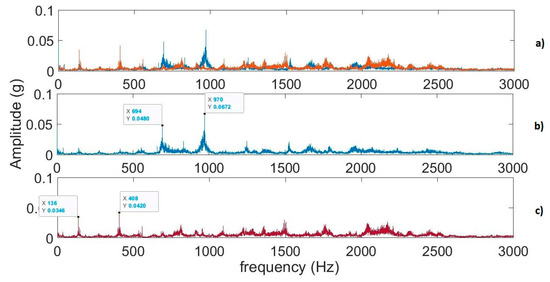
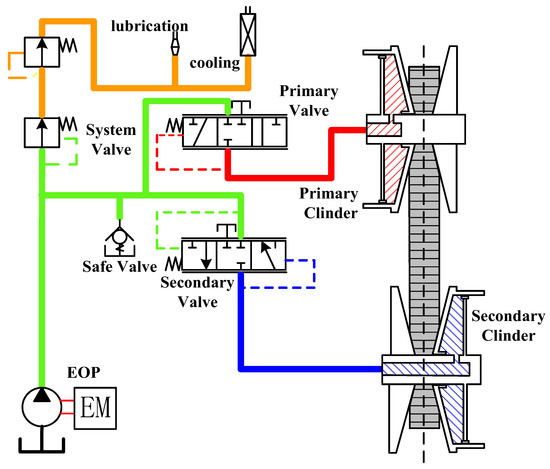
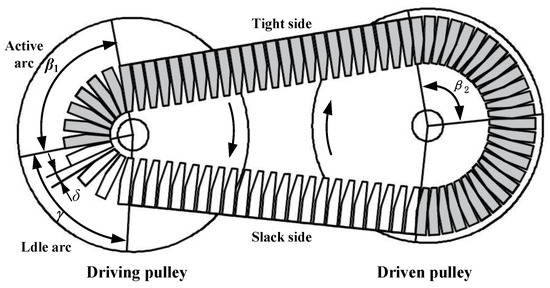
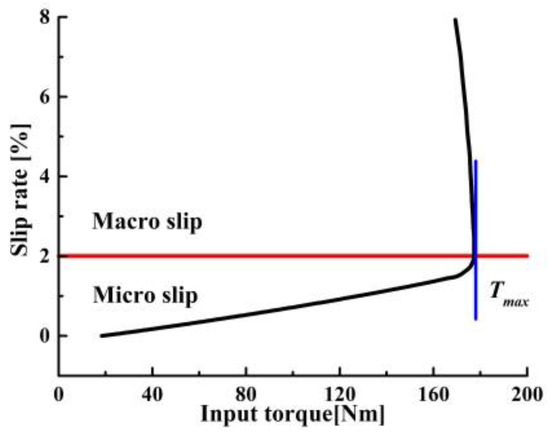
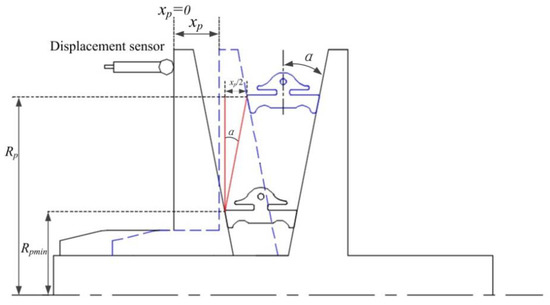
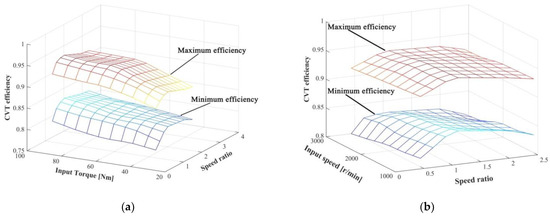
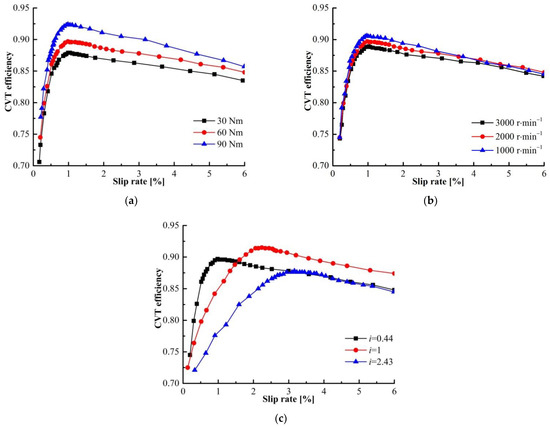
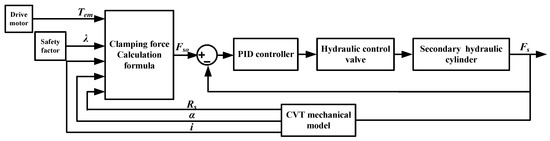
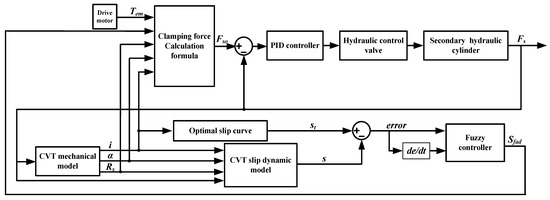
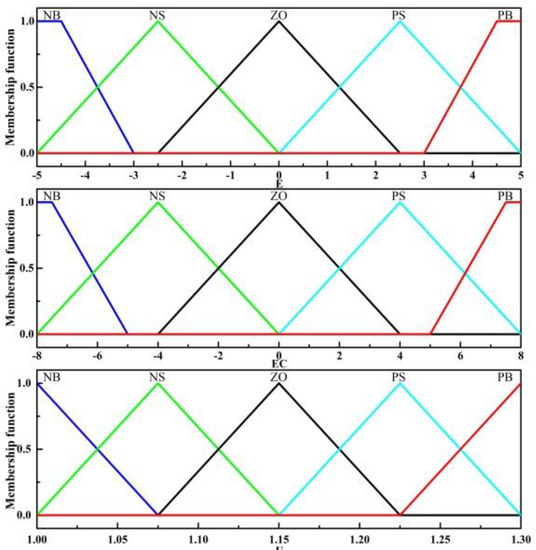
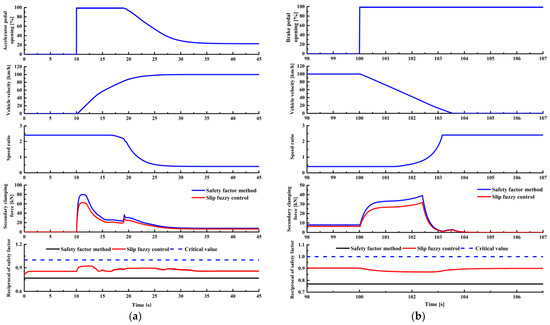
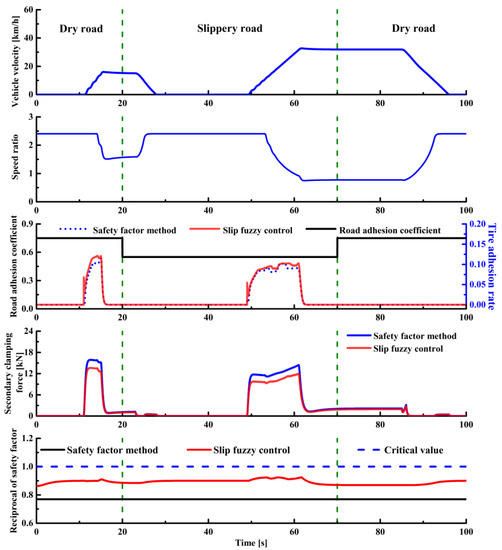
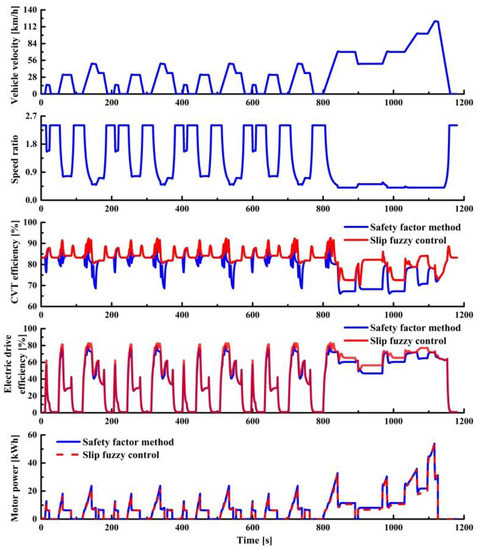
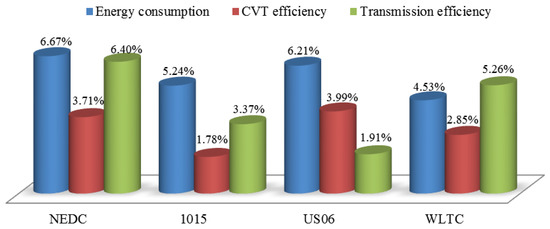
The low mechanical efficiency of metal belt’s continuously variable transmission (CVT) limits its application in new energy vehicles. To further improve CVT efficiency and reduce the energy consumption of electric vehicles (EVs) with CVT, this paper proposes a pure electric CVT configuration and a clamping force control strategy. The slip characteristics of CVT are obtained through a bench test, the dynamic model of CVT slip is established, and a clamping force fuzzy control strategy is designed. The strategy is studied by simulation under extreme conditions and standard driving cycles. The simulation results show that the proposed clamping force control strategy has good adaptability. Under extreme conditions, this strategy can ensure that CVT does not undergo macro slip, while reducing the clamping force by 12.86–21.65%. Energy consumption per 100 km is 14.90 kWh in NEDC, which is 6.67% lower compared with the traditional strategy. CVT average efficiency and average transmission efficiency increased by 3.71% and 6.40%. The research results demonstrate that adjusting the CVT clamping force through fuzzy control based on the slip rate can improve the CVT efficiency and energy economy of EVs, which provides a certain reference for CVT clamping force control strategy development and the application of CVT on EVs.
Full article
►▼
Show Figures
Open AccessArticle
Deep-Learning-Based Parking Area and Collision Risk Area Detection Using AVM in Autonomous Parking Situation
by
Sunwoo Lee, Dongkyu Lee and Seok-Cheol Kee
Cited by 6 | Viewed by 2810
Abstract
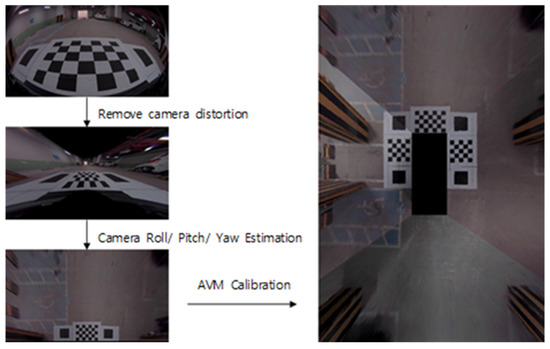
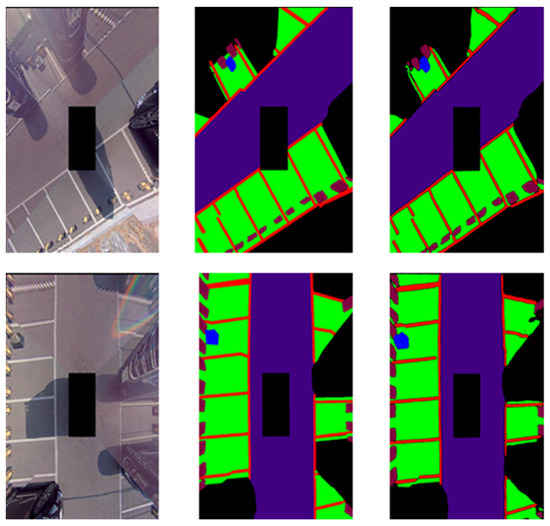
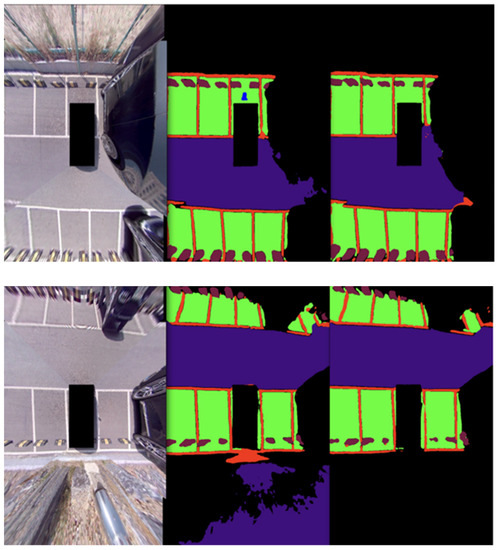
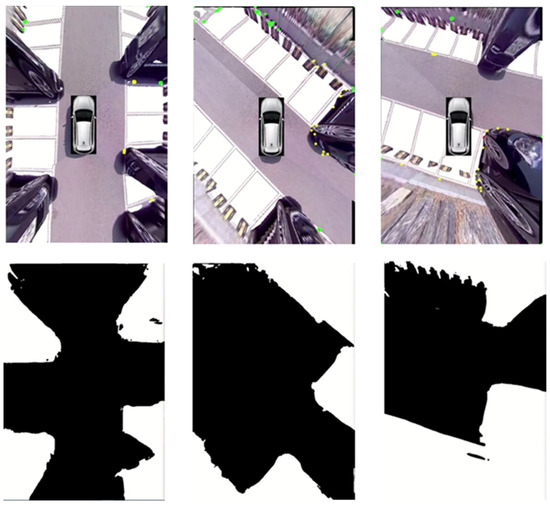
In this paper, I propose a bird eye view image detection method for parking areas and collision risk areas at the same time in parking situations. Deep learning algorithms using area detection and semantic segmentation were used. The main architecture of the method
[...] Read more.
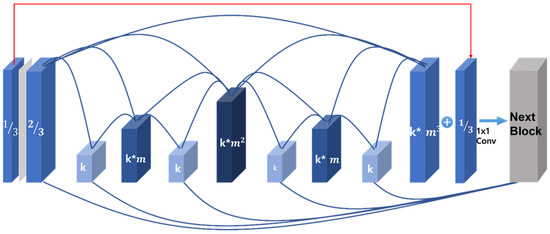
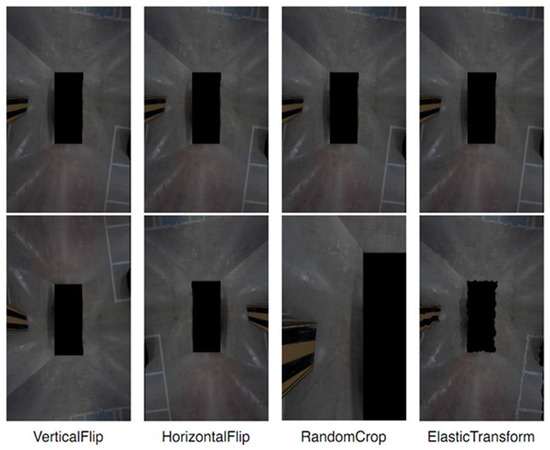
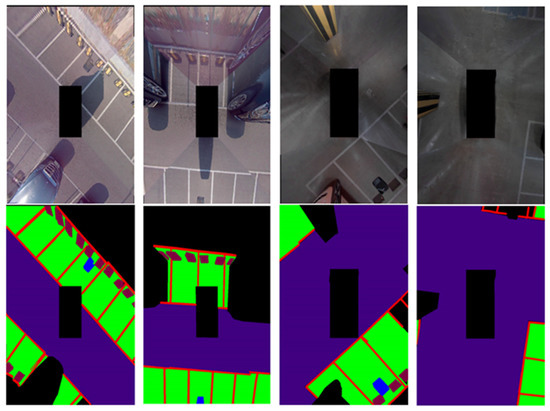
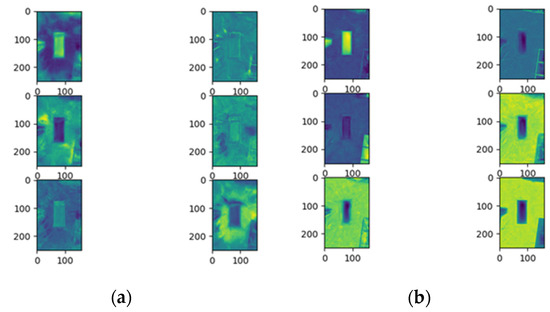
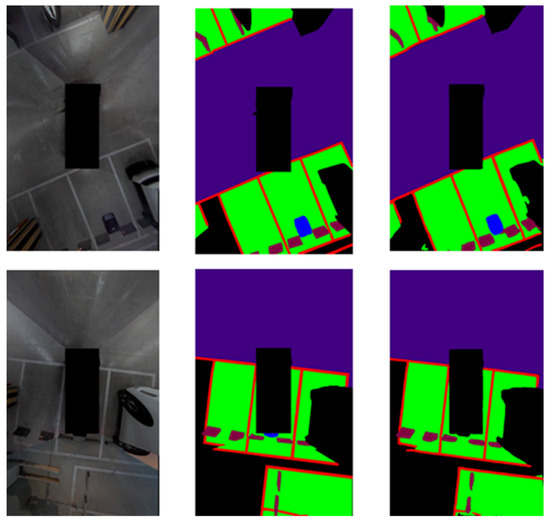
In this paper, I propose a bird eye view image detection method for parking areas and collision risk areas at the same time in parking situations. Deep learning algorithms using area detection and semantic segmentation were used. The main architecture of the method described in this paper is based on a harmonic densely connected network and a cross-stage partial network. The dataset used for training was calibrated to four 190° wide-angle cameras to generate around view monitor (AVM) images based on the Chungbuk National University parking lot, and an experiment was performed based on this dataset. In the experimental results, the available parking area was visualized by detecting the parking line, parking area, and available driving area in the AVM images. Furthermore, the undetected area in the semantic segmentation as a collision risk area was visualized in order to obtain the results. According to the proposed attention CSPHarDNet model, the experimental results were 81.89% mIoU and 18.36 FPS in a NVIDIA Xavier environment. The results of this experiment demonstrated that algorithms can be used in real time in a parking situation and have better performance results compared to the conventional HarDNet.
Full article
►▼
Show Figures





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}