
Lag Synchronization of Complex Lorenz System with Applications to Communication

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The LS Controller of Complex Lorenz Systems
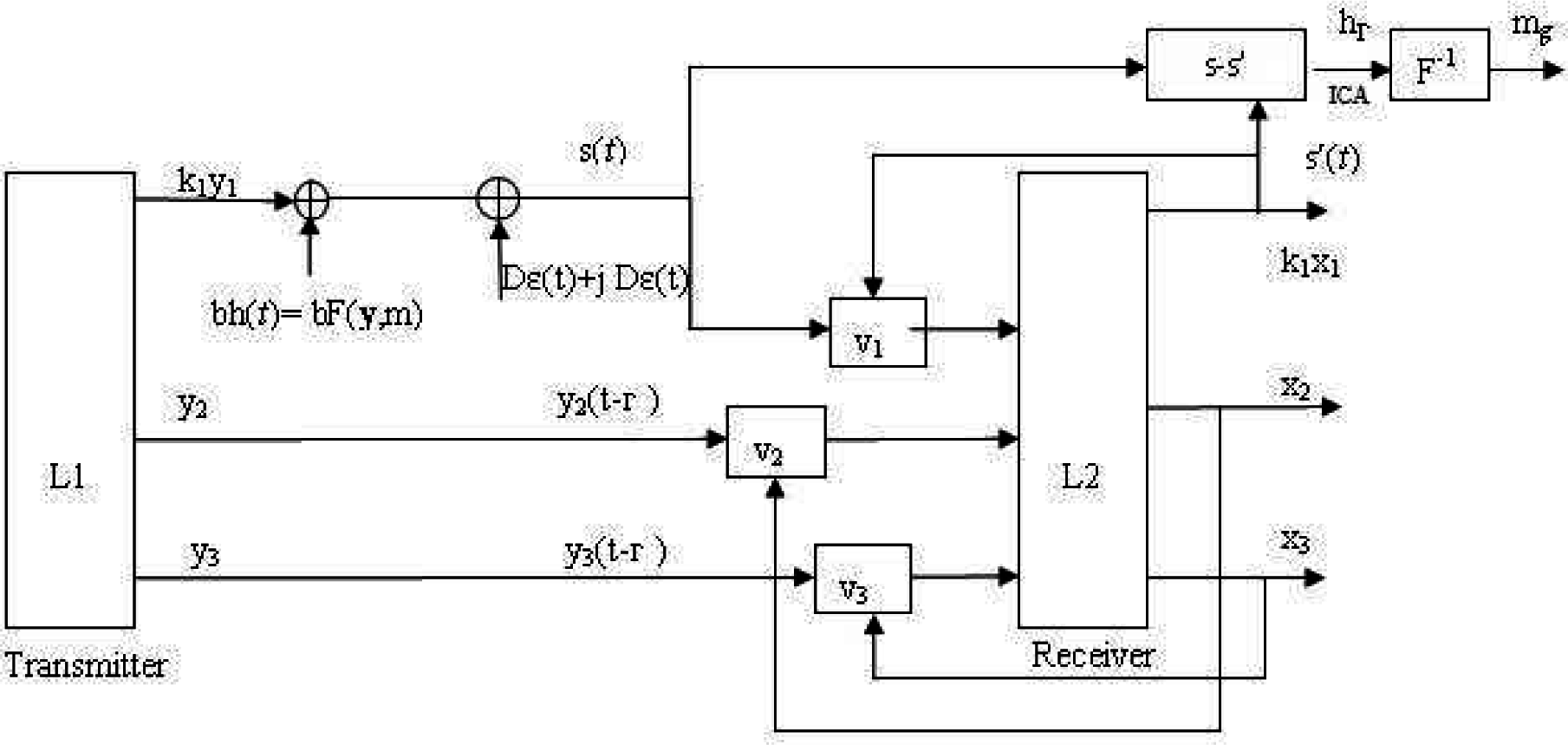
3. A Communication Scheme Based on LS
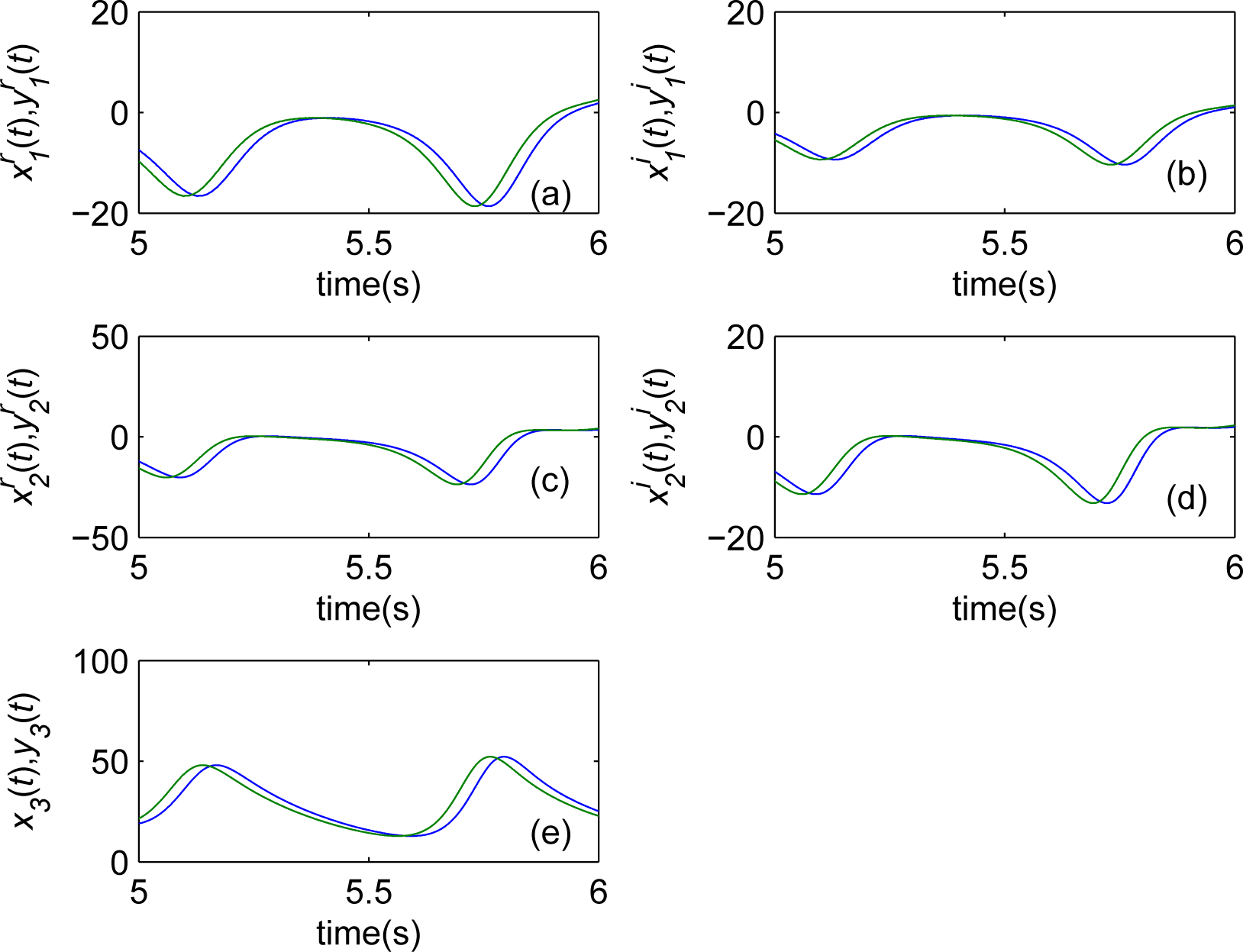
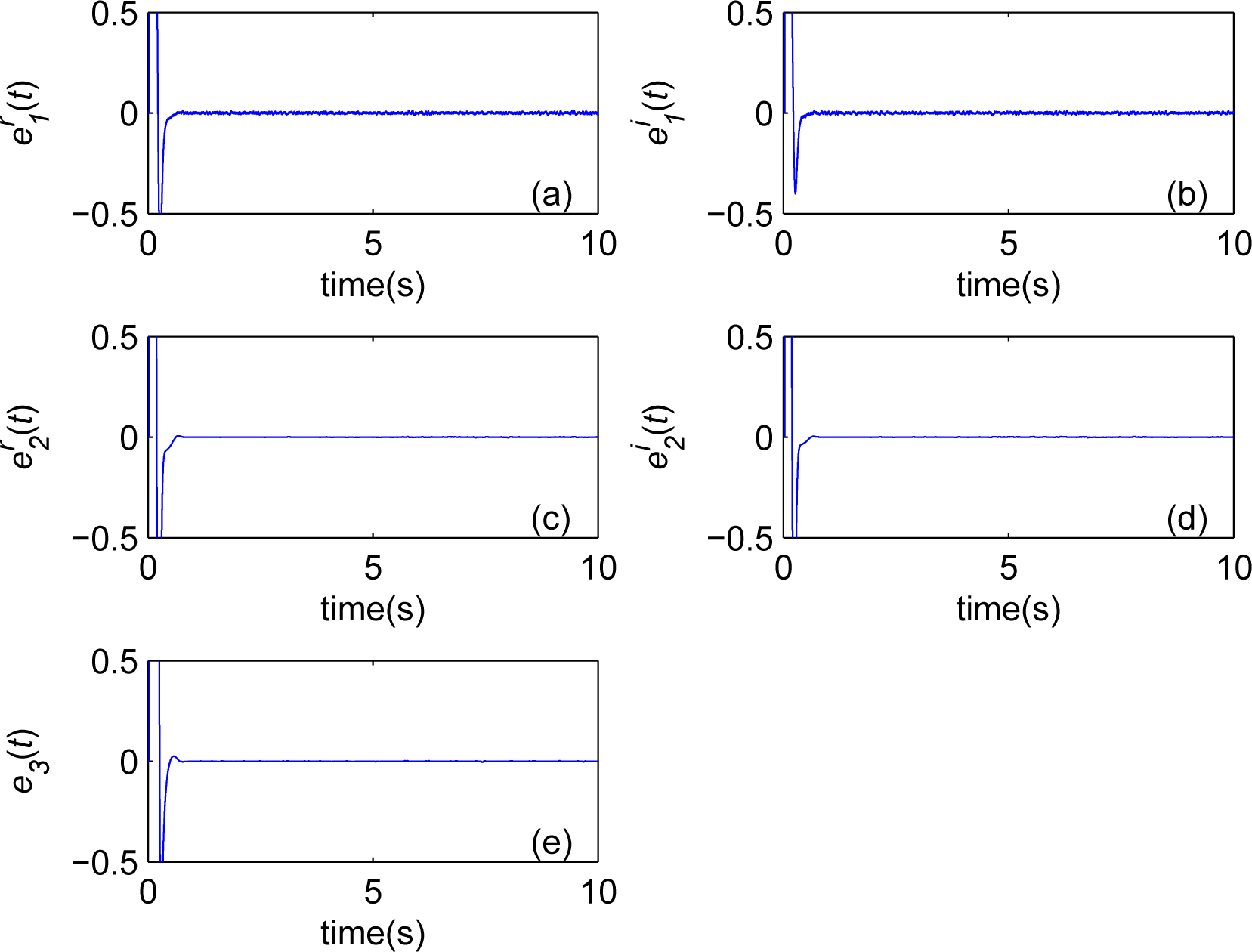
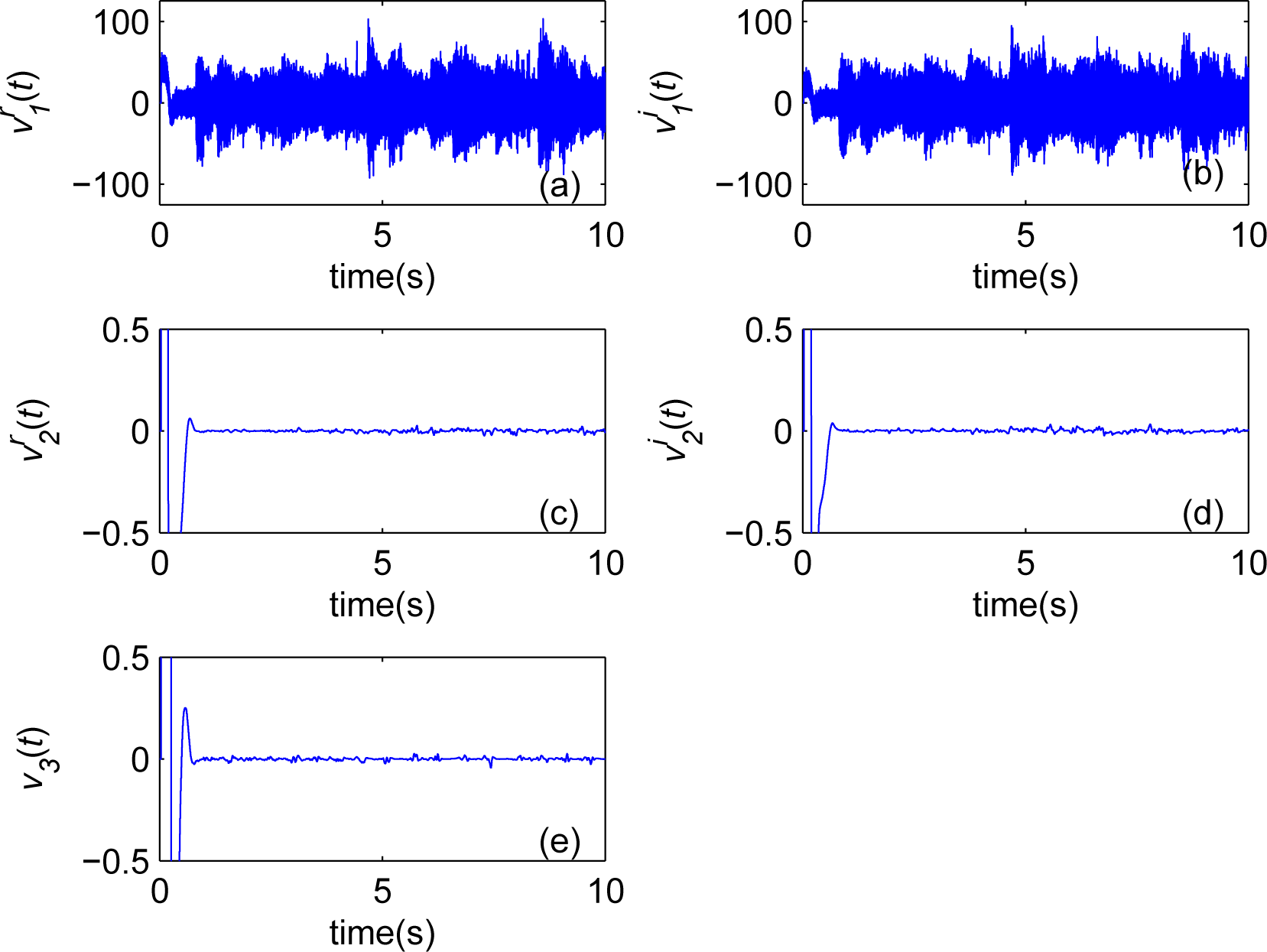
4. Simulations, Results and Discussion
- As the time delay of transmission, it is much closer to the real situation and more accurate to describe the synchronization between the transmitter and the receiver based on LS. It is more accurate and much closer to the real situation. This is one natural advantage in theory.
- It has double capacity of transmitted signals.
- Using the method of ICA, this communication scheme has a strong ability of anti-noise and robustness.
- Finally, we add the parameter b to regulate the amplitude of information signals, thus this scheme can transmit multiple messages with all kinds of amplitudes.
5. Conclusion
Acknowledgments
Conflicts of Interest
References
- Shahverdiev, E.M.; Sivaprakasam, S.; Shore, K.A. Lag synchronization in time-delayed systems. Phys. Lett. A 2002, 292, 320–324. [Google Scholar]
- Taherion, S.; Lai, Y.C. Observability of lag synchronization of coupled chaotic oscillators. Phys. Rev. E 1999, 59, 6247–6250. [Google Scholar]
- Mahmoud, E.E. Lag synchronization of hyperchaotic complex nonlinear systems via passive control. Appl. Math. Inf. Sci. 2013, 7, 1429–1436. [Google Scholar]
- Zhang, Q.J.; Zhao, J.C. Projective and lag synchronization between general complex networks via impulsive control. Nonlinear Dyn. 2012, 67, 2519–2525. [Google Scholar]
- Fowler, A.C.; Gibbon, J.D. The complex Lorenz equations. Physica D 1982, 4, 139–163. [Google Scholar]
- Ning, C.Z.; Haken, H. Detuned lasers and the complex Lorenz equations: Subcritical and supercritical Hopf bifurcations. Phys. Rev. A 1990, 41, 3826–3837. [Google Scholar]
- Mahmoud, G.M.; Bountis, T.; Mahmoud, E.E. Active control and global synchronization for complex Chen and Lü systems. Int. J. Bifurc. Chaos. 2007, 17, 4295–4308. [Google Scholar]
- Luo, C.; Wang, X.Y. Chaos generated from the fractional-order complex Chen system and its application to digital secure communication. Int. J. Mod. Phys. C 2013, 24, 1350025. [Google Scholar]
- Mahmoud, G.M.; Mahmoud, E.E. Phase and antiphase synchronization of two identical hyperchaotic complex nonlinear systems. Nonlinear Dyn. 2010, 61, 141–152. [Google Scholar]
- Mahmoud, G.M.; Mahmoud, E.E. Complete synchronization of chaotic complex nonlinear systems with uncertain parameters. Nonlinear Dyn. 2010, 62, 875–882. [Google Scholar]
- Mahmoud, G.M.; Mahmoud, E.E. Synchronization and control of hyperchaotic complex Lorenz system. Math. Comput. Simul. 2010, 80, 2286–2296. [Google Scholar]
- Liu, S.T.; Liu, P. Adaptive anti-synchronization of chaotic complex nonlinear systems with unknown parameters. Nonlinear Anal. Real World Appl. 2011, 12, 3046–3055. [Google Scholar]
- Liu, P.; Liu, S.T. Anti-synchronization between different chaotic complex systems. Phys. Scr. 2011, 83, 065006. [Google Scholar]
- Mahmoud, G.M.; Mahmoud, E.E. Lag synchronization of hyperchaotic complex nonlinear systems. Nonlinear Dyn. 2012, 67, 1613–1622. [Google Scholar]
- Liu, P.; Liu, S.T. Adaptive modified function projective synchronization of general uncertain chaotic complex systems. Phys. Scr. 2012, 85, 035005. [Google Scholar]
- Liu, P.; Liu, S.T. Robust adaptive full state hybrid synchronization of chaotic complex systems with unknown parameters and external disturbances. Nonlinear Dyn. 2012, 70, 585–599. [Google Scholar]
- Mahmoud, E.E. Modified projective phase synchronization of chaotic complex nonlinear systems. Math. Comput. Simul. 2013, 89, 69–85. [Google Scholar]
- Zhang, F.F.; Liu, S.T.; Yu, W.Y. Modified projective synchronization with complex scaling factors of uncertain real chaos and complex chaos. Chin. Phys. B. 2013, 22, 120505. [Google Scholar]
- Zhang, F.F.; Liu, S.T. Full State Hybrid Projective Synchronization and Parameter Identification for Uncertain Chaotic (Hyperchaotic) Complex Systems. J. Comput. Nonlin. Dyn. 2013, 9, 021009. [Google Scholar]
- Li, Z.G.; Xu, D.L. A secure communication scheme using projective chaos synchronization. Chaos Soliton. Fractals. 2004, 22, 477–481. [Google Scholar]
- Chee, C.Y.; Xu, D.L. Secure digital communication using controlled projective synchronisation of chaos. Chaos Soliton Fractals. 2005, 23, 1063–1070. [Google Scholar]
- Hoang, T.M.; Nakagawa, M. A secure communication system using projective-lag and/or projective-anticipating synchronizations of coupled multidelay feedback systems. Chaos Soliton Fractals. 2008, 38, 1423–1438. [Google Scholar]
- Zheng, G.; Boutat, D.; Floquet, T.; Barbot, J.P. Secure communication based on multi-input multi-output chaotic system with large message amplitude. Chaos Soliton Fractals. 2008, 41, 1510–1517. [Google Scholar]
- Moskalenko, O.I.; Koronovskii, A.A.; Hramov, A.E. Generalized synchronization of chaos for secure communication: remarkable stability to noise. Phys. Lett. A 2010, 374, 2925–2931. [Google Scholar]
- Wang, X.Y.; Gao, Y.F. A switch-modulated method for chaos digital secure communication based on user-defined protocol. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 99–104. [Google Scholar]
- Wang, X.Y.; Xu, B.; Zhang, H.G. A multi-ary number communication system based on hyperchaotic system of 6th-order cellular neural network. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 124–133. [Google Scholar]
- Liu, H.J.; Wang, X.Y.; Zhu, Q.L. Asynchronous anti-noise hyper chaotic secure communication system based on dynamic delay and state variables switching. Phys. Lett. A 2011, 375, 2828–2835. [Google Scholar]
- Zhang, Y.Q.; Wang, X.Y. A parameter modulation chaotic secure communication scheme with channel noises. Chin. Phys. Lett. 2011, 28, 020505. [Google Scholar]
- Eisencraft, M.; Fanganiello, R.D.; Grzybowski, J.M.V.; Soriano, D.C.; Attux, R.; Batista, A.M.; Macau, E.E.N.; Monteiro, L.H.A.; Romano, J.M.T.; Suyama, R.; et al. Chaos-based communication systems in non-ideal channels. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4707–4718. [Google Scholar]
- Wang, X.Y.; Xu, Bing; Luo, C. An asynchronous communication system based on the hyperchaotic system of 6th-order cellular neural network. Opt. Commun. 2012, 285, 5401–5405. [Google Scholar]
- Wang, X.Y.; Luo, C. Hybrid Modulus-phase Synchronization of Hyperchaotic Complex Systems and its Application to Secure Communication. Int. J. Nonlinear Sci. Numer. Simul. 2013, 14, 533–542. [Google Scholar]
- Mahmoud, G.M.; Mahmoud, E.E.; Arafa, A.A. On projective synchronization of hyperchaotic complex nonlinear systems based on passive theory for secure communications. Phys. Scr. 2013, 87, 055002. [Google Scholar]
- Liu, S.T.; Zhang, F.F. Complex function projective synchronization of complex chaotic system and its applications in secure communication. Nonlinear Dyn. 2014, 76, 1087–1097. [Google Scholar]
- Zhang, F.F.; Liu, S.T. Self-time-delay synchronization of time-delay coupled complex chaotic system and its applications to communication. Int. J. Mod. Phys. C 2014, 25, 1350102. [Google Scholar]
- Liu, P.; Liu, S.T. Control and coupling synchronization of Julia sets in coupled map lattice. Indian J. Phys. 2012, 86, 455–462. [Google Scholar]
- Zhang, Y.P.; Qiao, W.; Sun, J. Control and synchronization of Julia sets of complex standard family. Indian J. Phys. 2013, 87, 271–274. [Google Scholar]
- Gibbon, J.D.; McGuinnes, M. The real and complex Lorenz equations in rotating fluids and laser. Physica D 1982, 5, 108–122. [Google Scholar]
- Rauh, A.; Hannibal, L.; Abraham, N.B. Global stability properties of the complex Lorenz model. Physica D 1996, 99, 45–58. [Google Scholar]
- Richter, H. Controlling the Lorenz system: Combining global and local schemes. Chaos Soliton Fractals 2001, 12, 2375–2380. [Google Scholar]
- Mahmoud, G.M.; Aly, S.A.; Farghaly, A.A. On chaos synchronization of a complex two coupled dynamos system. Chaos Soliton Fractals 2007, 33, 178–187. [Google Scholar]
- Mahmoud, G.M.; Al-Kashif, M.A.; Farghaly, A.A. Chaotic and hyperchaotic attractors of a complex nonlinear system. J. Phys. A 2008, 41, 055104. [Google Scholar]
- Mahmoud, G.M.; Ahmed, M.E.; Mahmoud, E.E. Analysis of hyperchaotic complex Lorenz systems. Int. J. Mod. Phys. C 2008, 19, 1477–1494. [Google Scholar]
- Mahmoud, G.M.; Bountis, T.; AbdEl-Latif, G.M.; Mahmoud, E.E. Chaos synchronization of two different complex Chen and Lü systems. Nonlinear Dyn. 2009, 55, 43–53. [Google Scholar]
- Fang, N.W. Eigenvalues of a class of diagonally dominant matrics and application. J. Anhui Univ. 1995, 1, 18–22, In Chinese. [Google Scholar]





© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F. Lag Synchronization of Complex Lorenz System with Applications to Communication. Entropy 2015, 17, 4974-4985. https://doi.org/10.3390/e17074974
Zhang F. Lag Synchronization of Complex Lorenz System with Applications to Communication. Entropy. 2015; 17(7):4974-4985. https://doi.org/10.3390/e17074974
Chicago/Turabian StyleZhang, Fangfang. 2015. "Lag Synchronization of Complex Lorenz System with Applications to Communication" Entropy 17, no. 7: 4974-4985. https://doi.org/10.3390/e17074974
APA StyleZhang, F. (2015). Lag Synchronization of Complex Lorenz System with Applications to Communication. Entropy, 17(7), 4974-4985. https://doi.org/10.3390/e17074974