
Distributed Consensus of Nonlinear Multi-Agent Systems on State-Controlled Switching Topologies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Statement
3. Main Results
3.1. Switching Law Design
- (1)
- (2)
- (3)
- (4)
3.2. Consensus Analysis
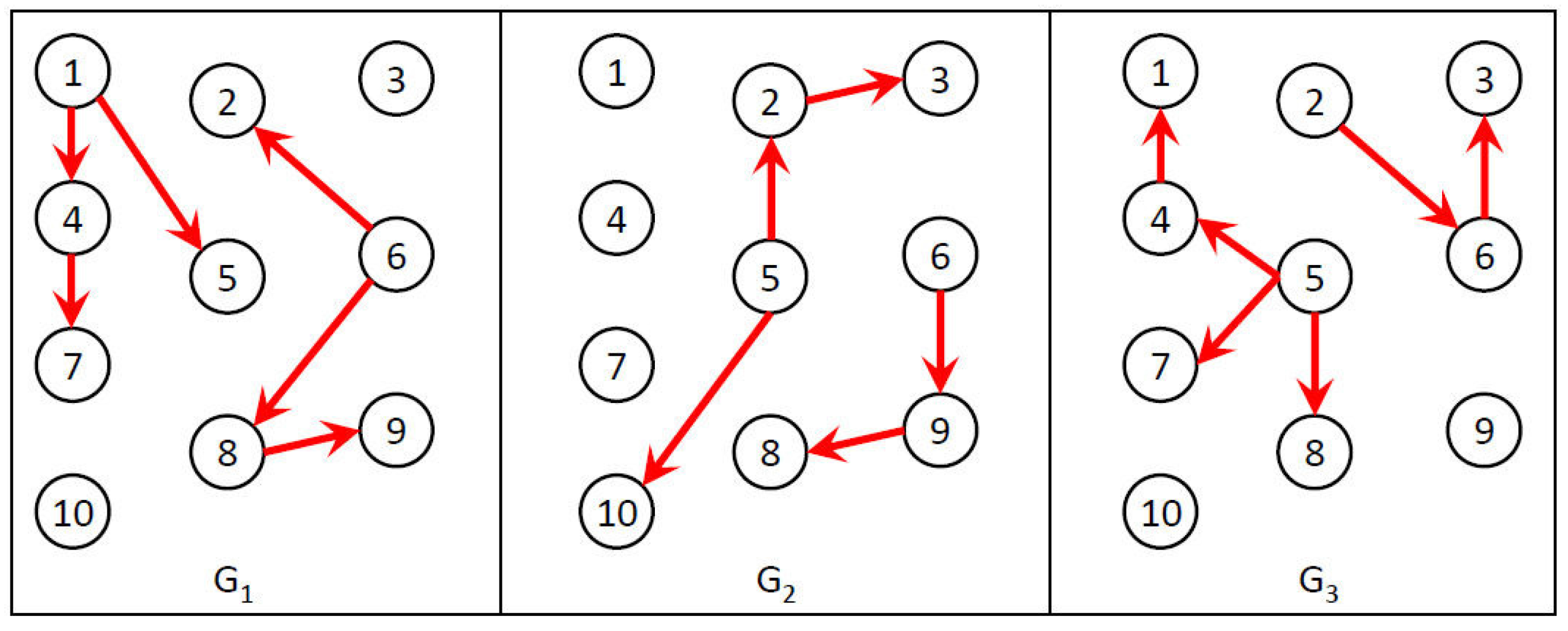
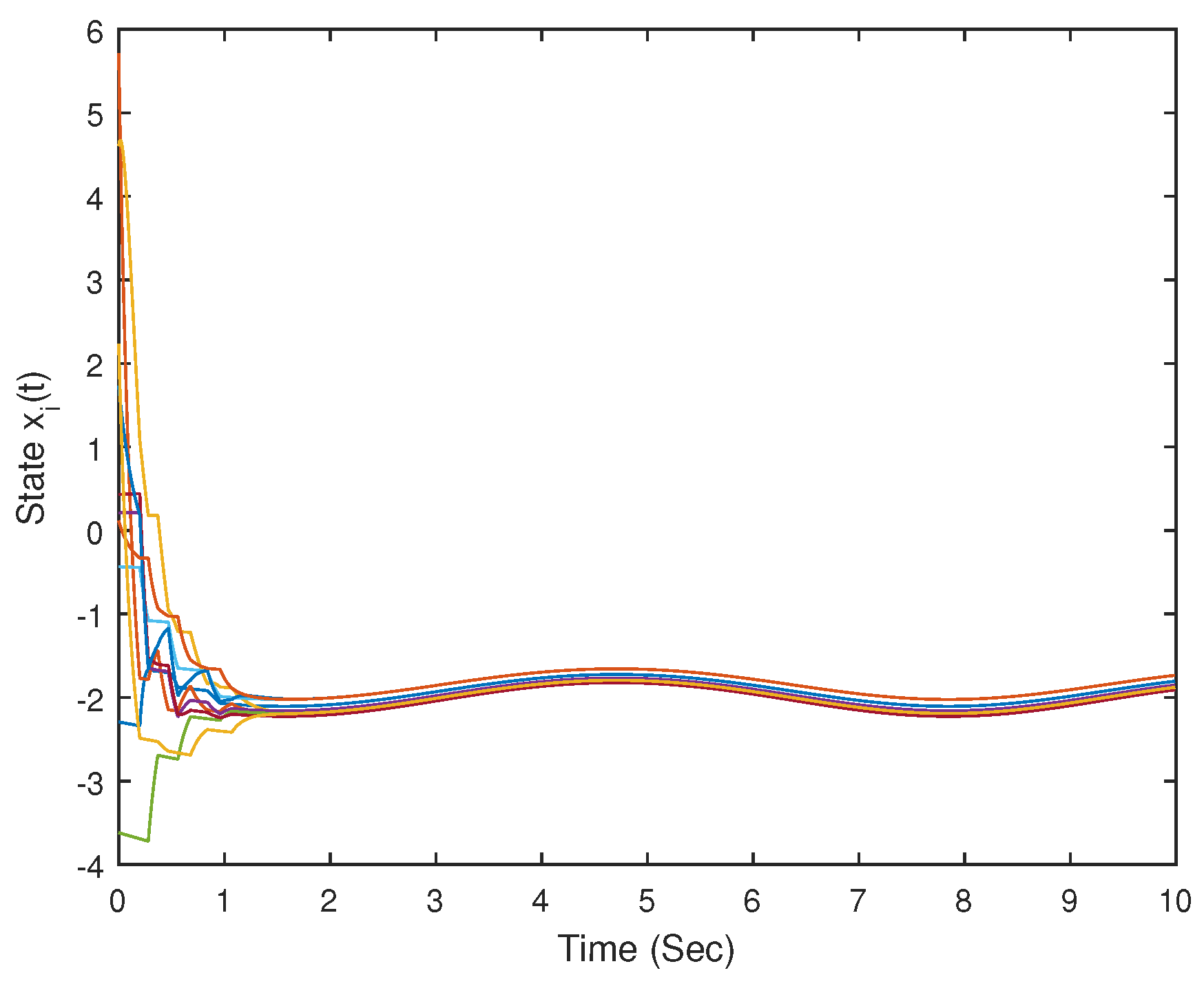
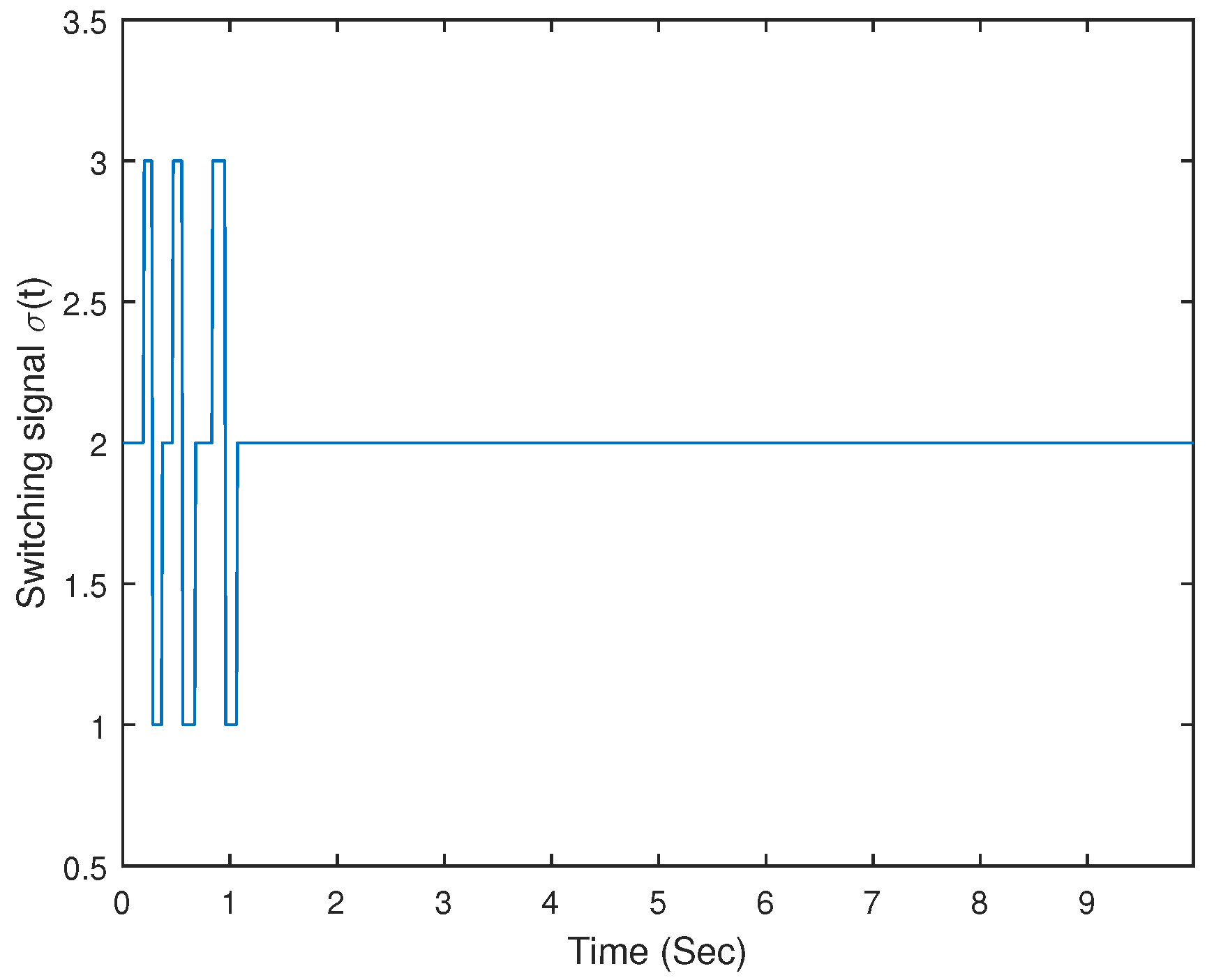
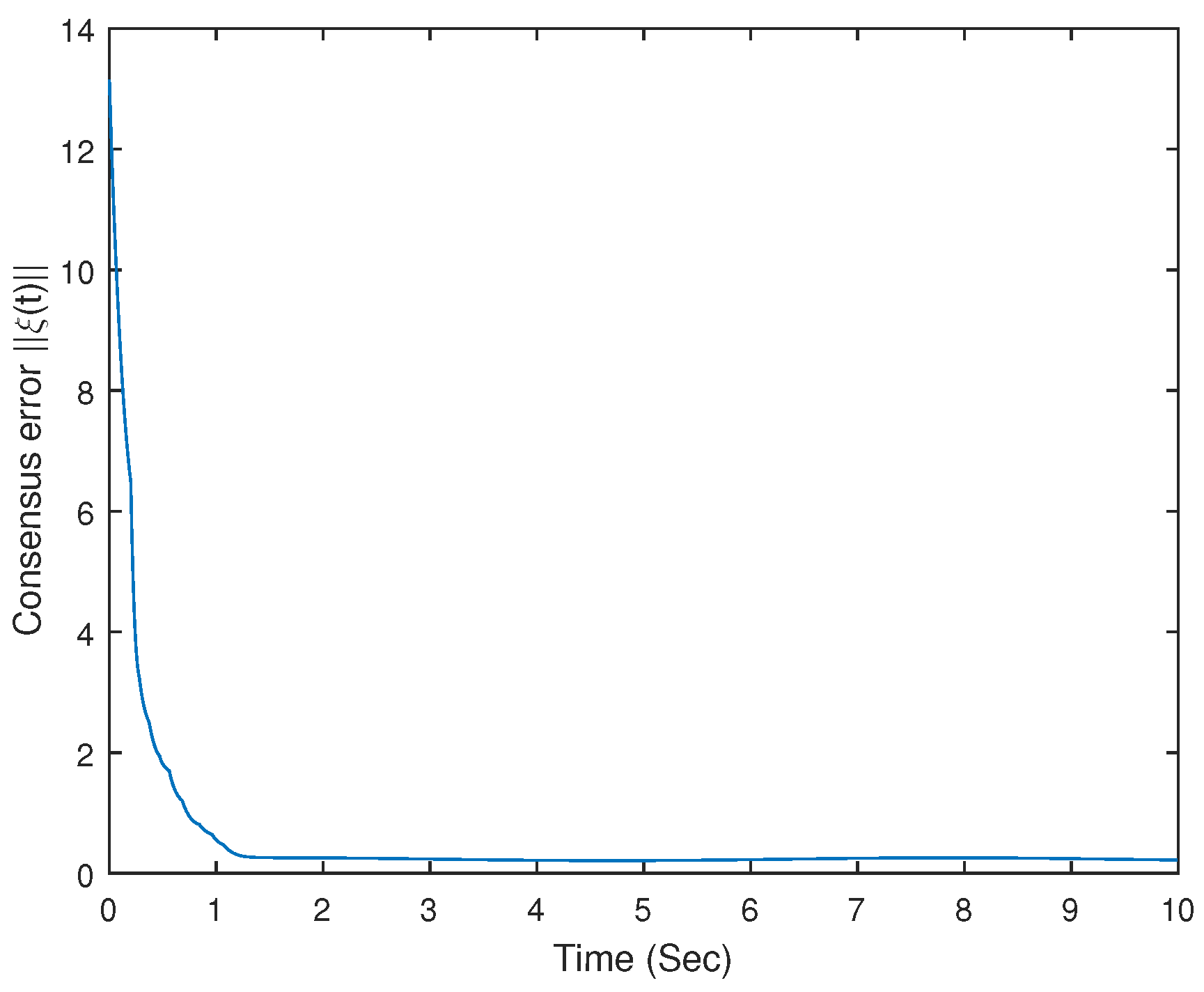
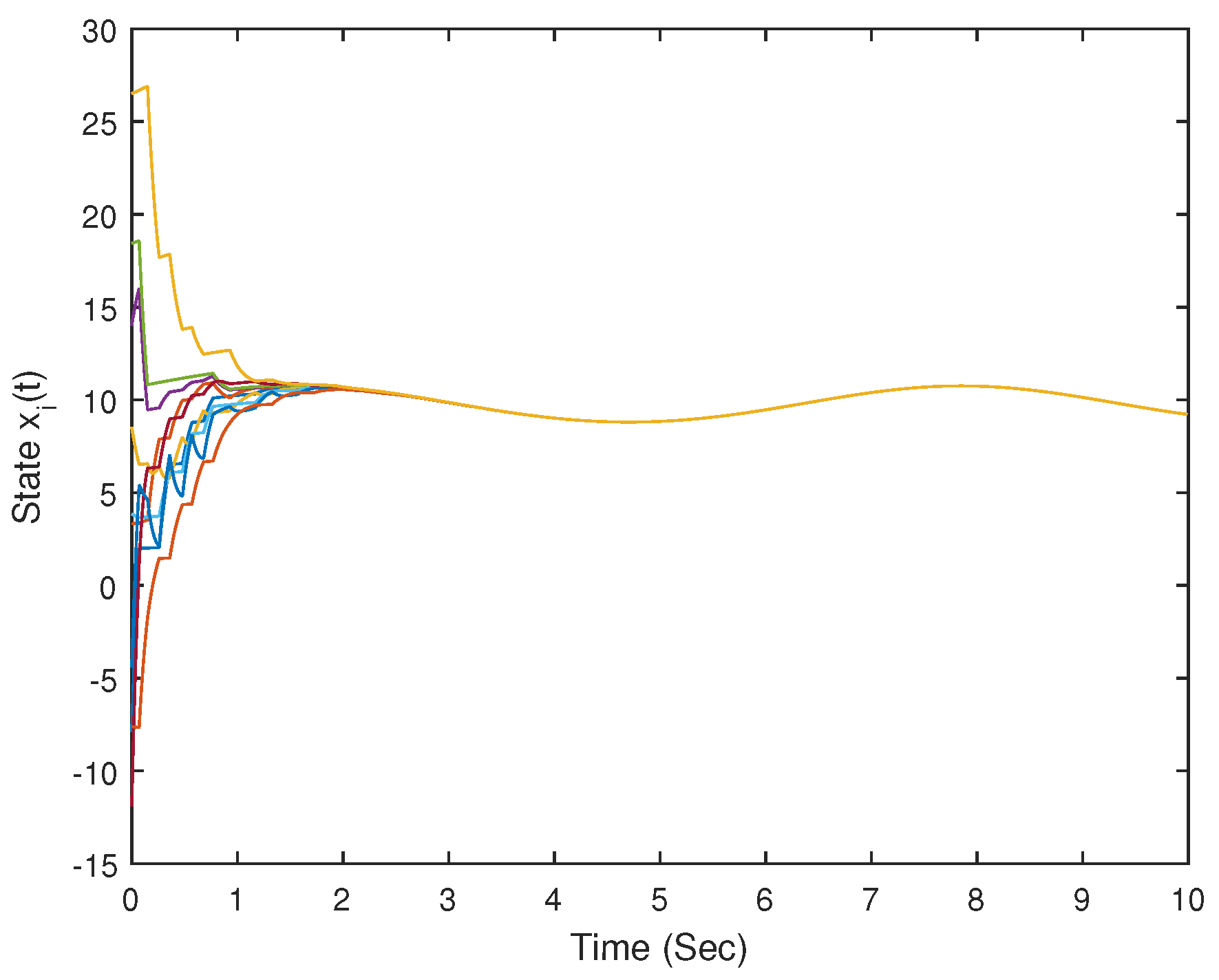
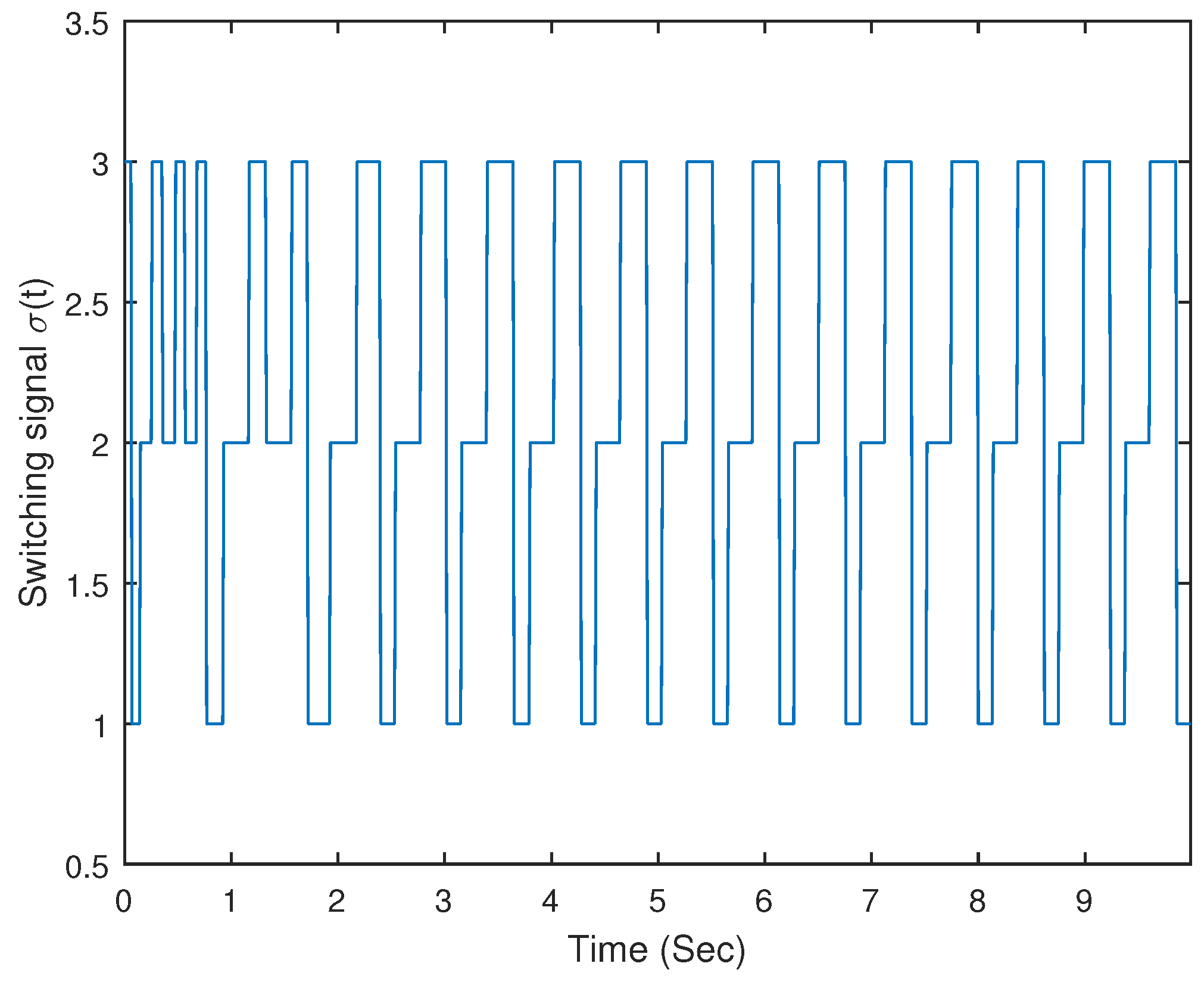
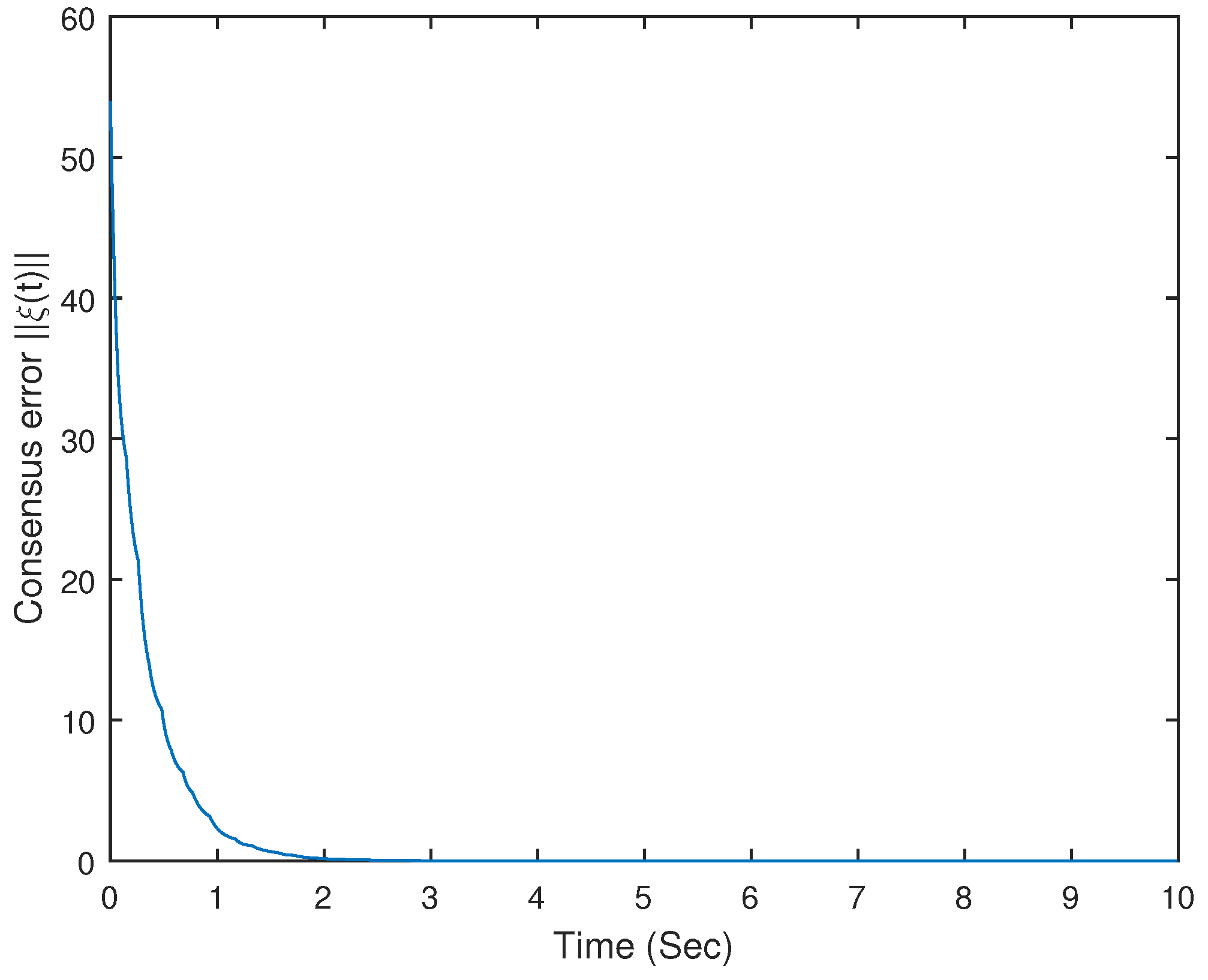
4. Numerical Simulations







5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Olfati-Saber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Moreau, L. Stability of multiagent systems with timedependent communication links. IEEE Trans. Autom. Control 2005, 50, 169–182. [Google Scholar] [CrossRef]
- Cao, M.; Morse, A.S.; Anderson, B.D. Reaching a consensus in a dynamically changing environment: A graphical approach. SIAM J. Control Optim. 2008, 47, 575–600. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, L. Consensus of multi-agent systems in directed networks with nonuniform time-varying delays. IEEE Trans. Autom. Control 2009, 54, 1607–1613. [Google Scholar]
- Proskurnikov, A.V. Average consensus in networks with nonlinearly delayed couplings and switching topology. Automatica 2013, 49, 2928–2932. [Google Scholar] [CrossRef]
- Wang, J.; Chen, K.; Ma, Q. Adaptive leader-following consensus of multi-agent systems with unknown nonlinear dynamics. Entropy 2014, 16, 5020–5031. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y. Consensus analysis of heterogeneous multi-agent systems with time-varying delay. Entropy 2015, 17, 3631–3644. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems. Automatica 2010, 46, 1089–1095. [Google Scholar] [CrossRef]
- Liu, C.; Liu, F. Delayed-compensation algorithm for second-order leader-following consensus seeking under communication delay. Entropy 2015, 17, 3752–3765. [Google Scholar] [CrossRef]
- Hou, Z.; Cheng, L.; Tan, M. Decentralized robust adaptive control for the multiagent system consensus problem using neural networks. IEEE Trans. Syst. Man Cybern. 2009, 39, 636–647. [Google Scholar]
- Peng, Z.; Wang, D.; Zhang, H.W.; Sun, G. Distributed neural network control for adaptive synchronization of uncertain dynamical multiagent systems. IEEE Trans. Neural Netw. 2014, 25, 1508–1519. [Google Scholar] [CrossRef] [PubMed]
- Shang, Y. Consensus of noisy multiagent systems with Markovian switching topologies and time-varying delays. Math. Probl. Eng. 2015, 2015, 453072. [Google Scholar] [CrossRef]
- Papachristodoulou, A.; Jadbabaie, A.; Munz, U. Effects of delay in multi-agent consensus and oscillator synchronization. IEEE Trans. Autom. Control 2010, 55, 1471–1477. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Q.; Wang, Y.; Yu, D. Quantized consensus on first-order integrator networks. Syst. Control Lett. 2012, 61, 1145–1150. [Google Scholar] [CrossRef]
- Yang, T.; Meng, Z.; Dimarogonas, D.V.; Johansson, K.H. Global consensus for discretetime multi-agent systems with input saturation constraints. Automatica 2014, 50, 499–506. [Google Scholar] [CrossRef]
- Shang, Y. Group pinning consensus under fixed and randomly switching topologies with acyclic partition. Netw. Heterogen. Media 2014, 9, 553–573. [Google Scholar] [CrossRef]
- Wen, G.; Yu, W.; Hu, G.; Cao, J.; Yu, X. Pinning synchronization of directed networks with switching topologies: A multiple Lyapunov functions approach. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 3239–3250. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Qu, Z. Distributed finite-time consensus of nonlinear systems under switching topologies. Automatica 2014, 50, 1626–1631. [Google Scholar] [CrossRef]
- Ren, W. Synchronization of coupled harmonic oscillators with local interaction. Automatica 2008, 44, 3195–3200. [Google Scholar] [CrossRef]
- Qin, J.; Gao, H.; Zheng, W. Second-order consensus for multi-agent systems with switching topology and communication delay. Syst. Control Lett. 2011, 60, 390–397. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M. Consensus in directed networks of agents with nonlinear dynamics. IEEE Trans. Autom. Control 2011, 56, 1436–1441. [Google Scholar] [CrossRef]
- Liu, K.; Xie, G.; Ren, W.; Wang, L. Consensus for multiagent systems with inherent nonlinear dynamics under directed topologies. Syst. Control Lett. 2013, 62, 152–162. [Google Scholar] [CrossRef]
- Liu, W.; Zhou, S.; Qi, Y.; Wu, X. Leaderless consensus of multi-agent systems with Lipschitz nonlinear dynamics and switching topologies. Neurocomputing 2016, 173, 1322–1329. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirók, A.; Jacob, E.B.; Cohen, I.; Schochet, O. Novel type of phase transitions in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Hong, Y.; Gao, L.; Cheng, D.; Hu, J. Lyapunov-based approach to multiagent systems with switching jointly connected interconnection. IEEE Trans. Autom. Control 2007, 52, 943–948. [Google Scholar] [CrossRef]
- Shang, Y. Couple-group consensus of continuous-time multi-agent systems under Markovian switching topologies. J. Frankl. Inst. 2015, 352, 4826–4844. [Google Scholar] [CrossRef]
- Miao, G.; Xu, S.; Zou, Y. Necessary and sufficient conditions for mean square consensus under Markov switching topologies. Int. J. Syst. Sci. 2013, 44, 178–186. [Google Scholar] [CrossRef]
- Shang, Y. Consensus seeking over Markovian switching networks with time-varying delays and uncertain topologies. Appl. Math. Comput. 2016, 273, 1234–1245. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y. Consensus of a class of second-order multiagent systems with time-delay and jointly-connected topologies. IEEE Trans. Autom. Control 2010, 55, 778–784. [Google Scholar]
- Lin, P.; Jia, Y. Multi-agent consensus with diverse time-delays and jointly-connected topologies. Automatica 2011, 47, 848–856. [Google Scholar] [CrossRef]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Zhu, W. Consensus of multiagent systems with switching jointly reachable interconnection and time delays. IEEE Trans. Syst. Man Cybern. 2012, 42, 348–358. [Google Scholar] [CrossRef]
- Sun, Z. Switched Linear Systems: Control and Design; Springer: London, UK, 2006. [Google Scholar]
- Wu, C. Synchronization in arrays of coupled nonlinear systems with delay and nonreciprocal time-varying coupling. IEEE Trans. Circuits Syst. II 2005, 52, 282–286. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Wang, J.; Zhang, Y. Distributed Consensus of Nonlinear Multi-Agent Systems on State-Controlled Switching Topologies. Entropy 2016, 18, 29. https://doi.org/10.3390/e18010029
Chen K, Wang J, Zhang Y. Distributed Consensus of Nonlinear Multi-Agent Systems on State-Controlled Switching Topologies. Entropy. 2016; 18(1):29. https://doi.org/10.3390/e18010029
Chicago/Turabian StyleChen, Kairui, Junwei Wang, and Yun Zhang. 2016. "Distributed Consensus of Nonlinear Multi-Agent Systems on State-Controlled Switching Topologies" Entropy 18, no. 1: 29. https://doi.org/10.3390/e18010029
APA StyleChen, K., Wang, J., & Zhang, Y. (2016). Distributed Consensus of Nonlinear Multi-Agent Systems on State-Controlled Switching Topologies. Entropy, 18(1), 29. https://doi.org/10.3390/e18010029