
Measurement on the Complexity Entropy of Dynamic Game Models for Innovative Enterprises under Two Kinds of Government Subsidies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Government Financial Subsidies for Enterprises’ Innovation Investment
2.1. Model Analysis
2.2. Model Solving
2.2.1. The Stage of Price Decision
2.2.2. The Stage of Innovation Output Decision
2.3. Analysis of the Equilibrium Point and the Stability of the System
- ;
- ;
- ;
- ;
2.4. Numerical Simulation
2.4.1. The Influence of the Decision Parameters on the Stability and the Entropy of the System
2.4.2. The Influence of Government Innovation Subsidy Rate on the Stability Region
2.4.3. The Effect of the Government Innovation Subsidy Rate on Firms’ Innovation Activities
2.4.4. The Effect of the Innovation Input Parameter on Firms’ Innovation Activities
3. Government Financial Subsidies Based on Enterprises’ Innovation Outputs
3.1. The Model
3.2. Model Solving
3.3. Analysis of the Equilibrium Point and the Stability of the System
3.4. Numerical Simulation
3.4.1. The Influence of the Decision Parameters on the Stability and the Entropy of the System
3.4.2. The Influence of the Subsidy Coefficient of Innovation Outputs to the Stability Region
3.4.3. The Effect of the Subsidy Coefficient of Innovation Outputs on Firms’ Innovation Activities
3.4.4. The Effect of the Innovation Input Parameter on Firms’ Innovation Activities
4. Comparison of the Effects of the Two Kinds of Subsidy Policies on Innovation
- (1)
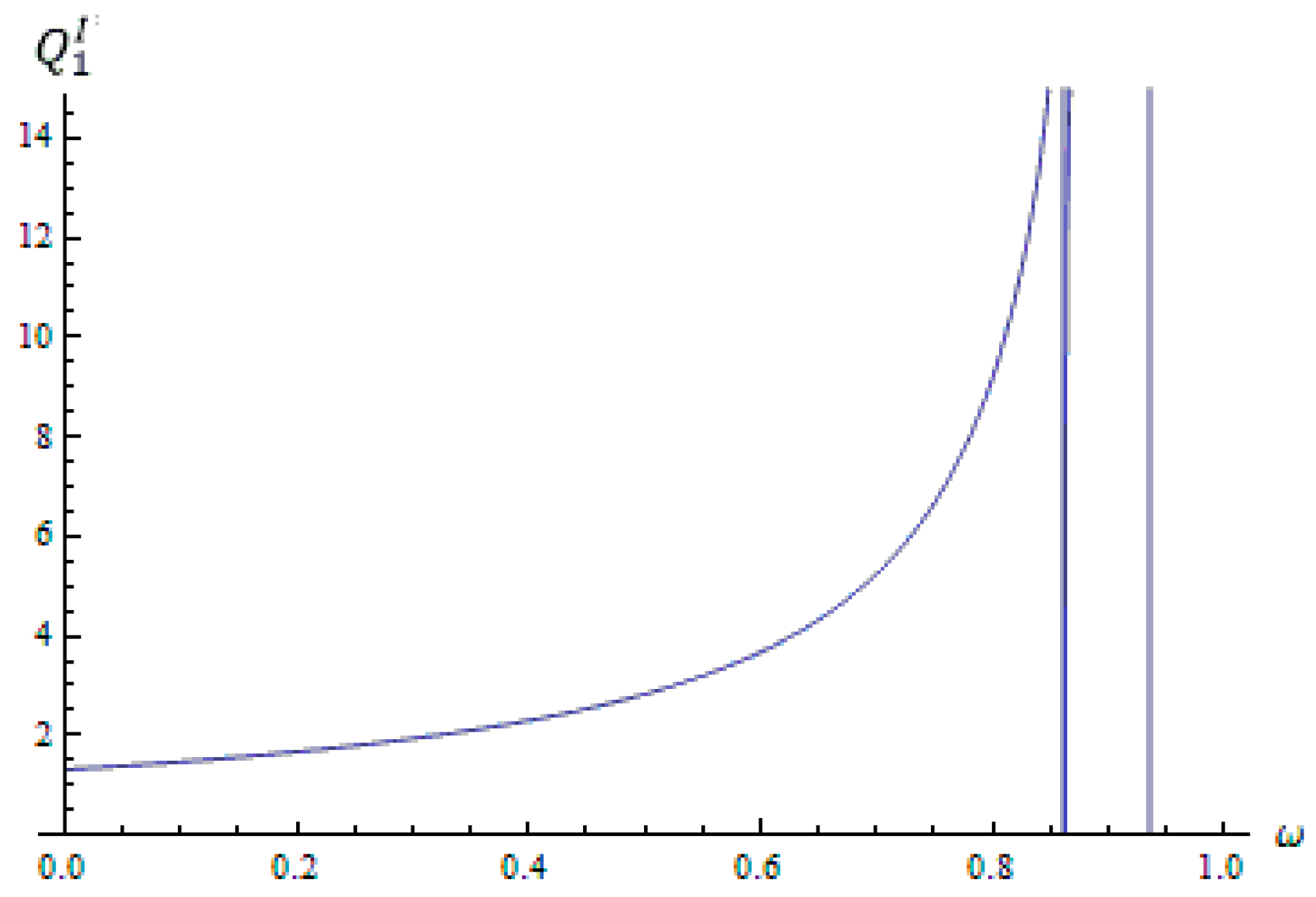
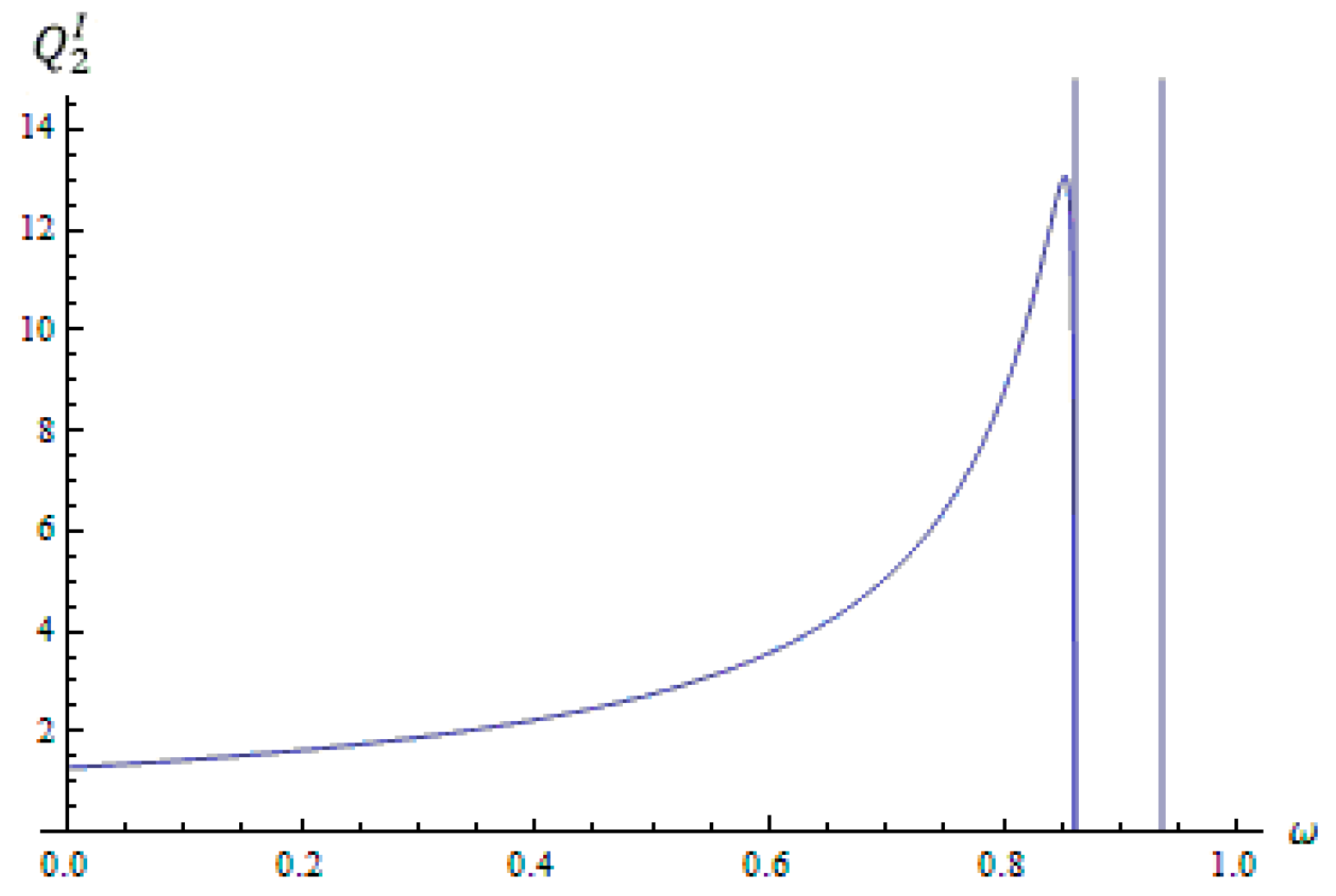
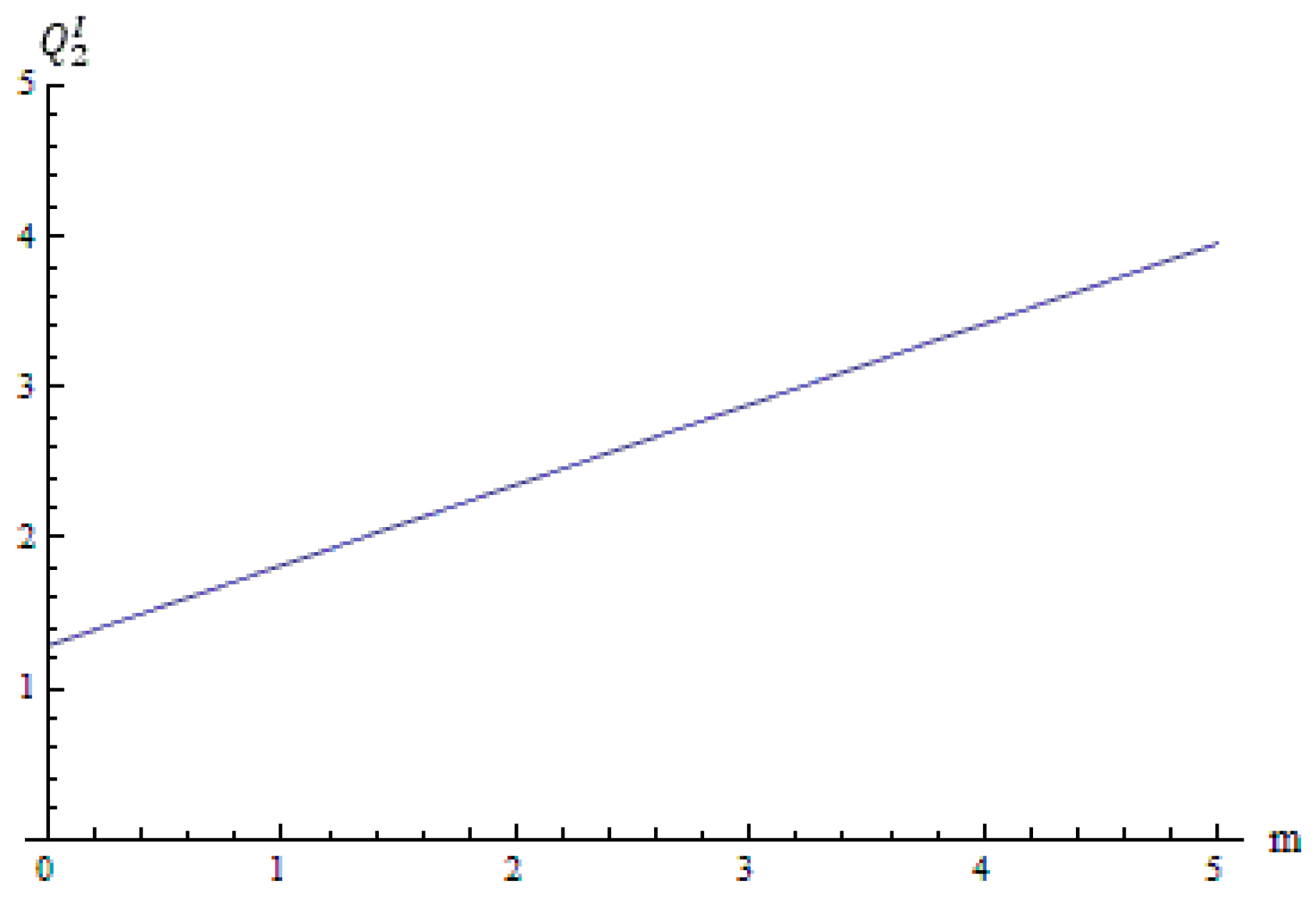
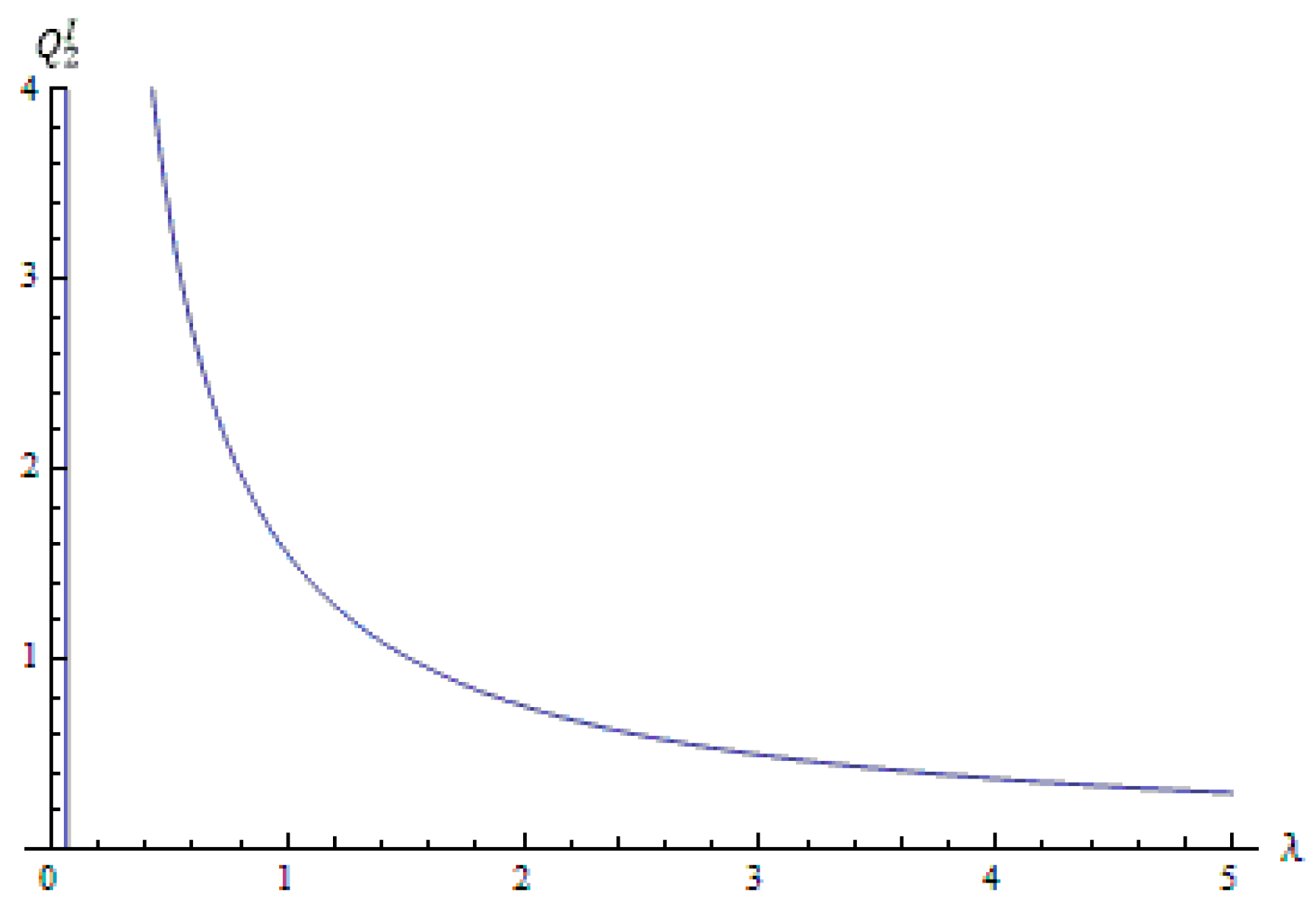
- In the aspect of stimulating firms’ innovation activities, the two kinds of subsidy policies both play a positive role, so the government can encourage firms’ innovation activities by increasing the subsidy rate or increasing the subsidy coefficient of innovation outputs . What is different is that under the first policy, the relationship of the innovation output decision and the subsidy rate has a marginal increasing character, while under the second policy, firms’ innovation outputs decision is proportional to the subsidy coefficient. This means that the first policy, which is based on the innovation inputs, has a more significant incentive effect on innovation activities than the second policy, which is based on the innovation outputs.
- (2)
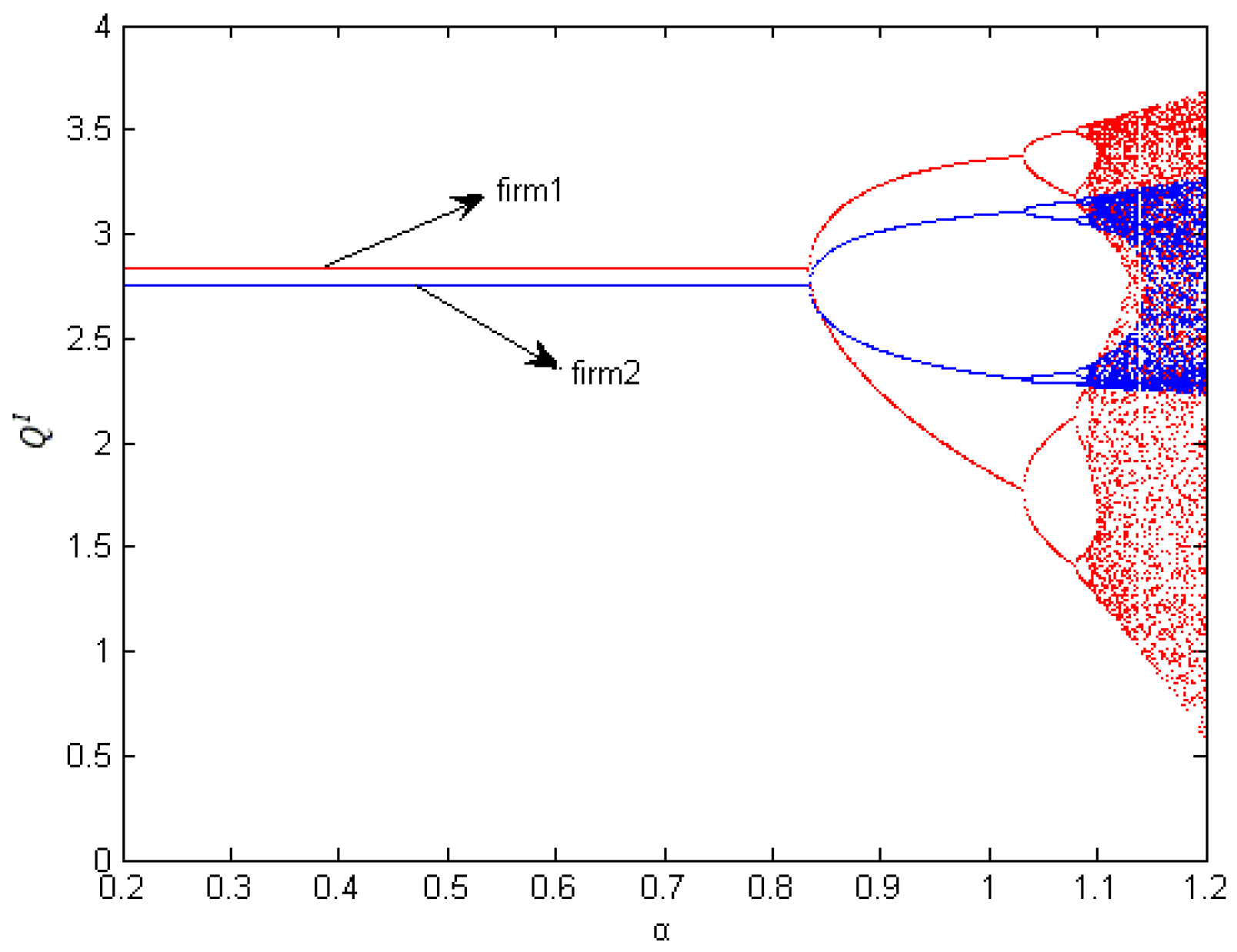
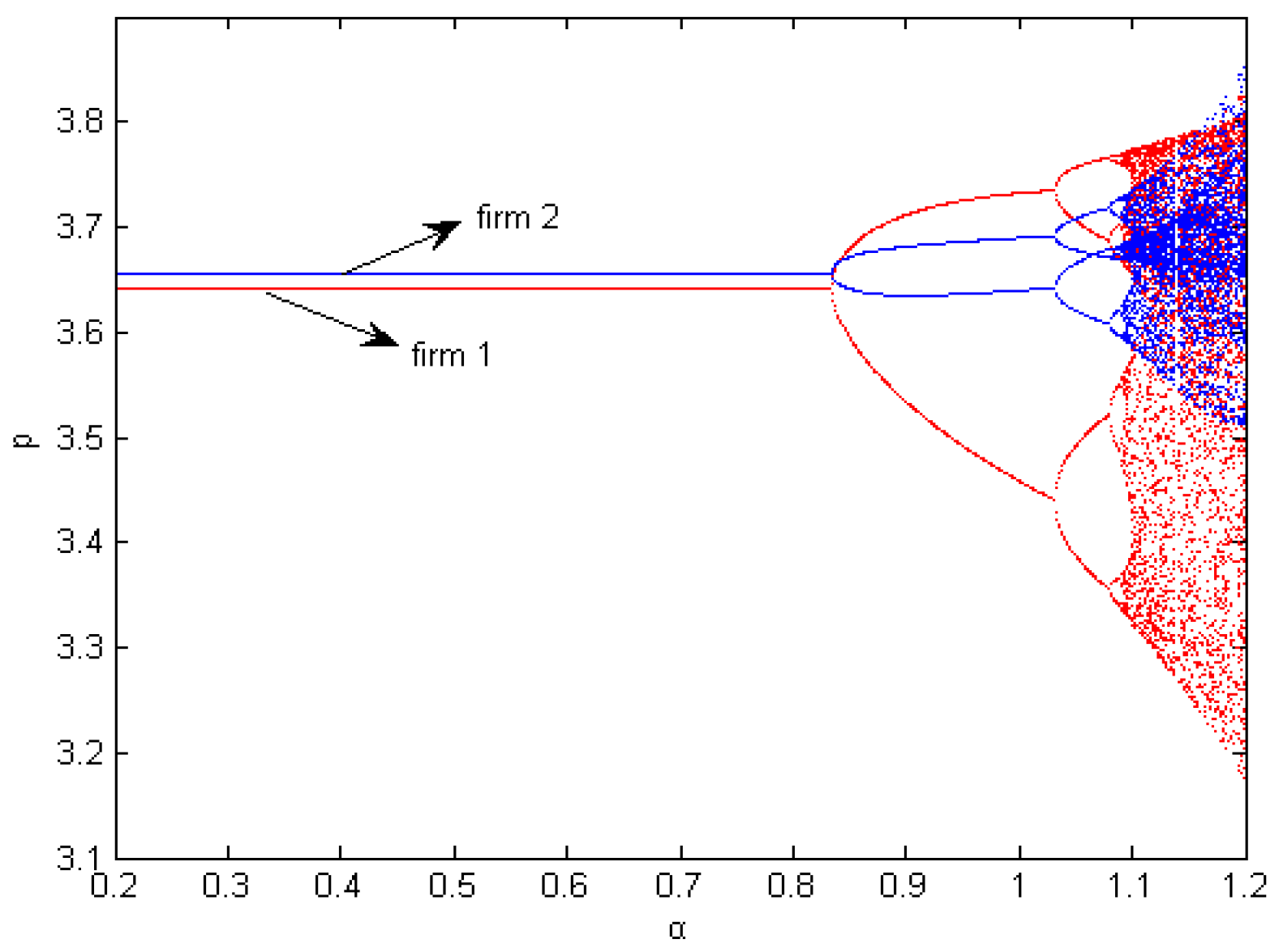
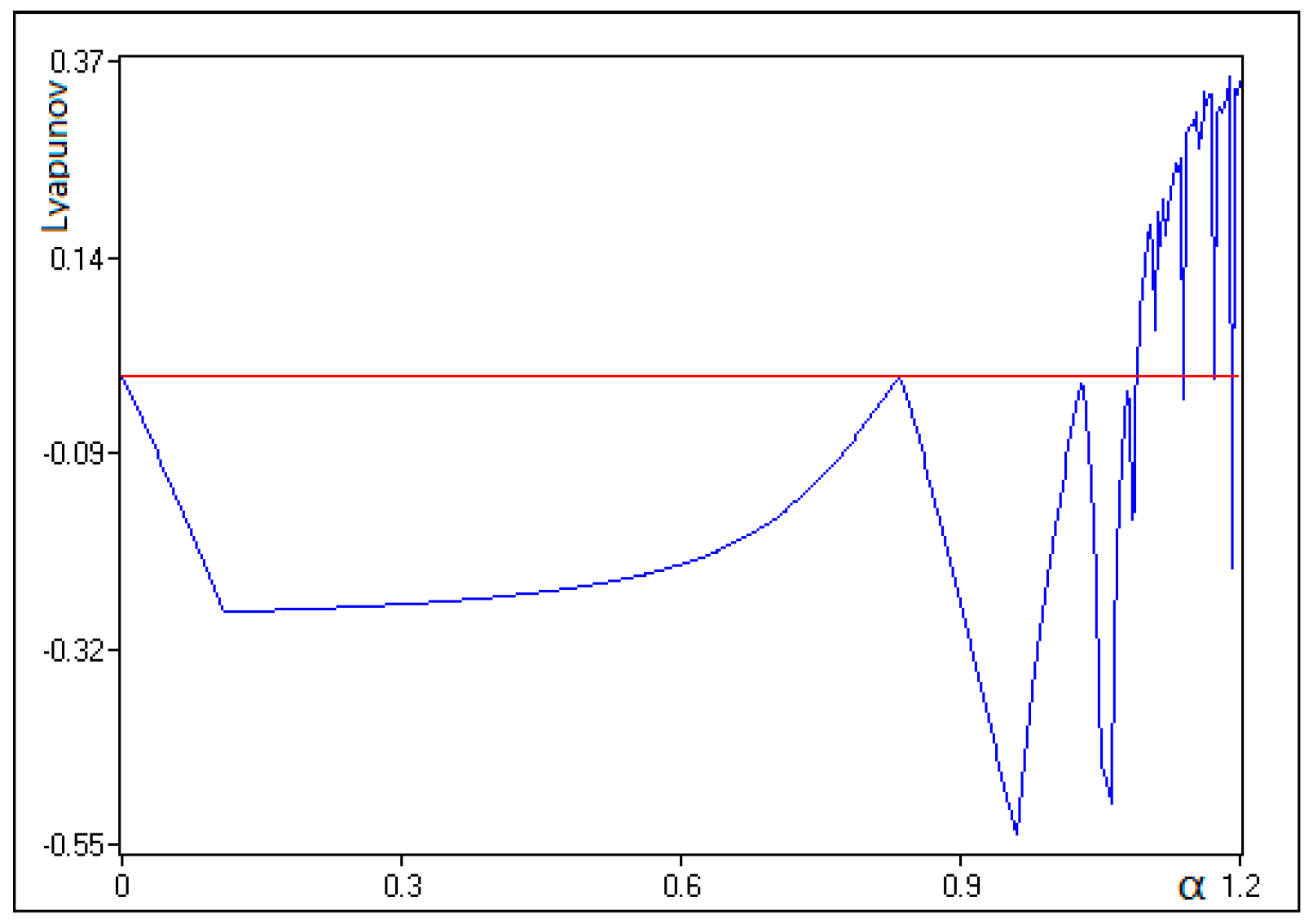
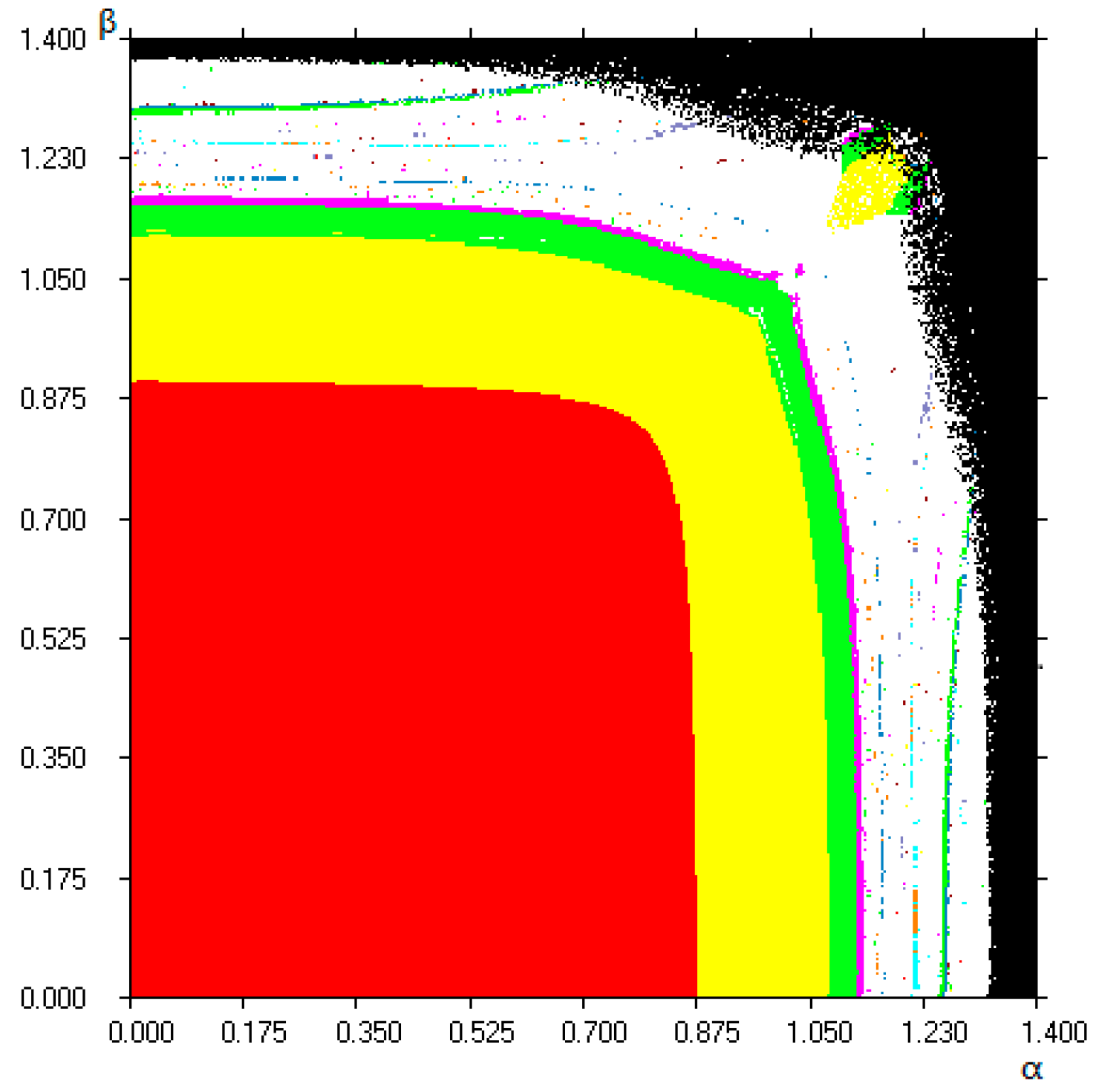
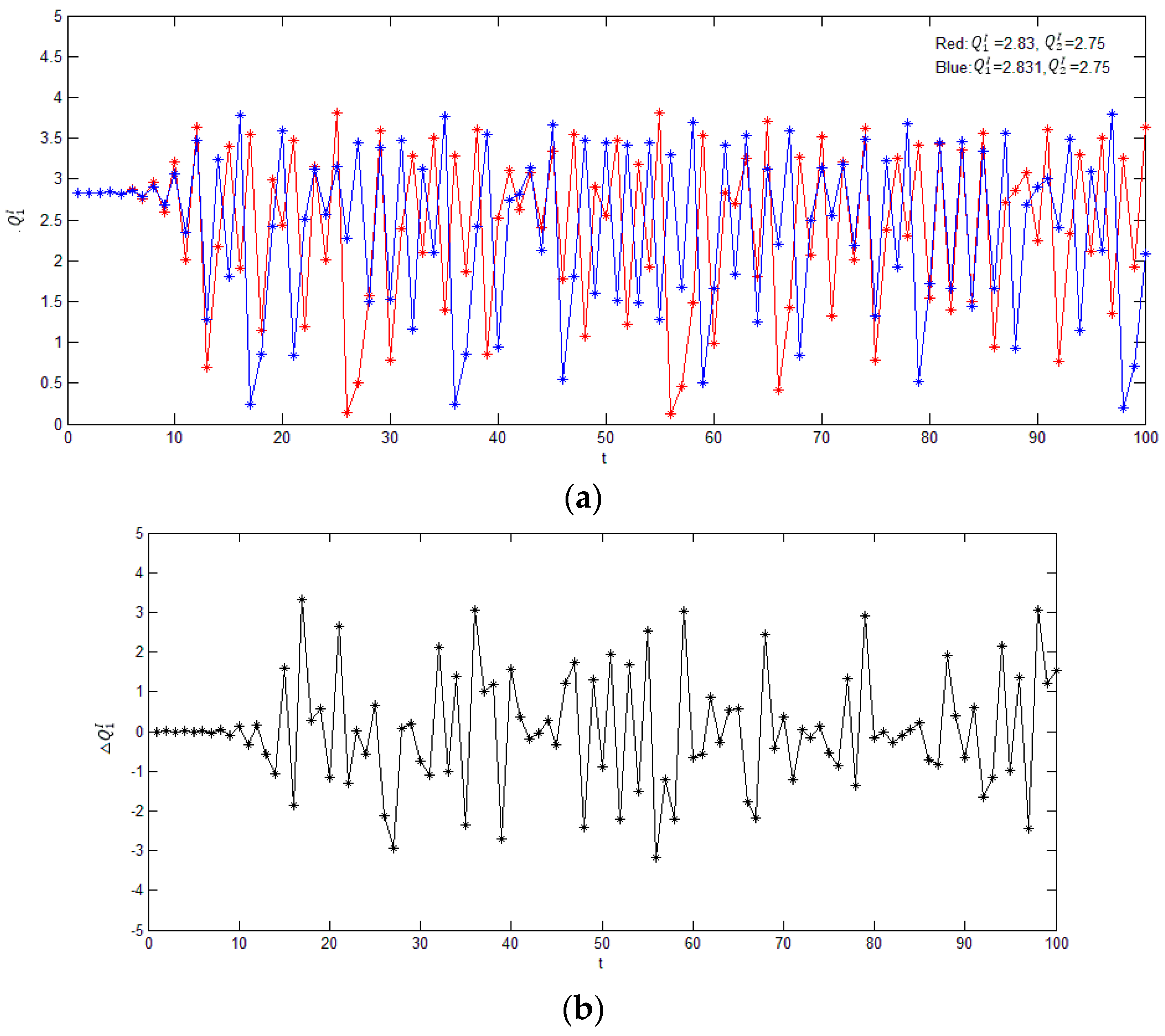
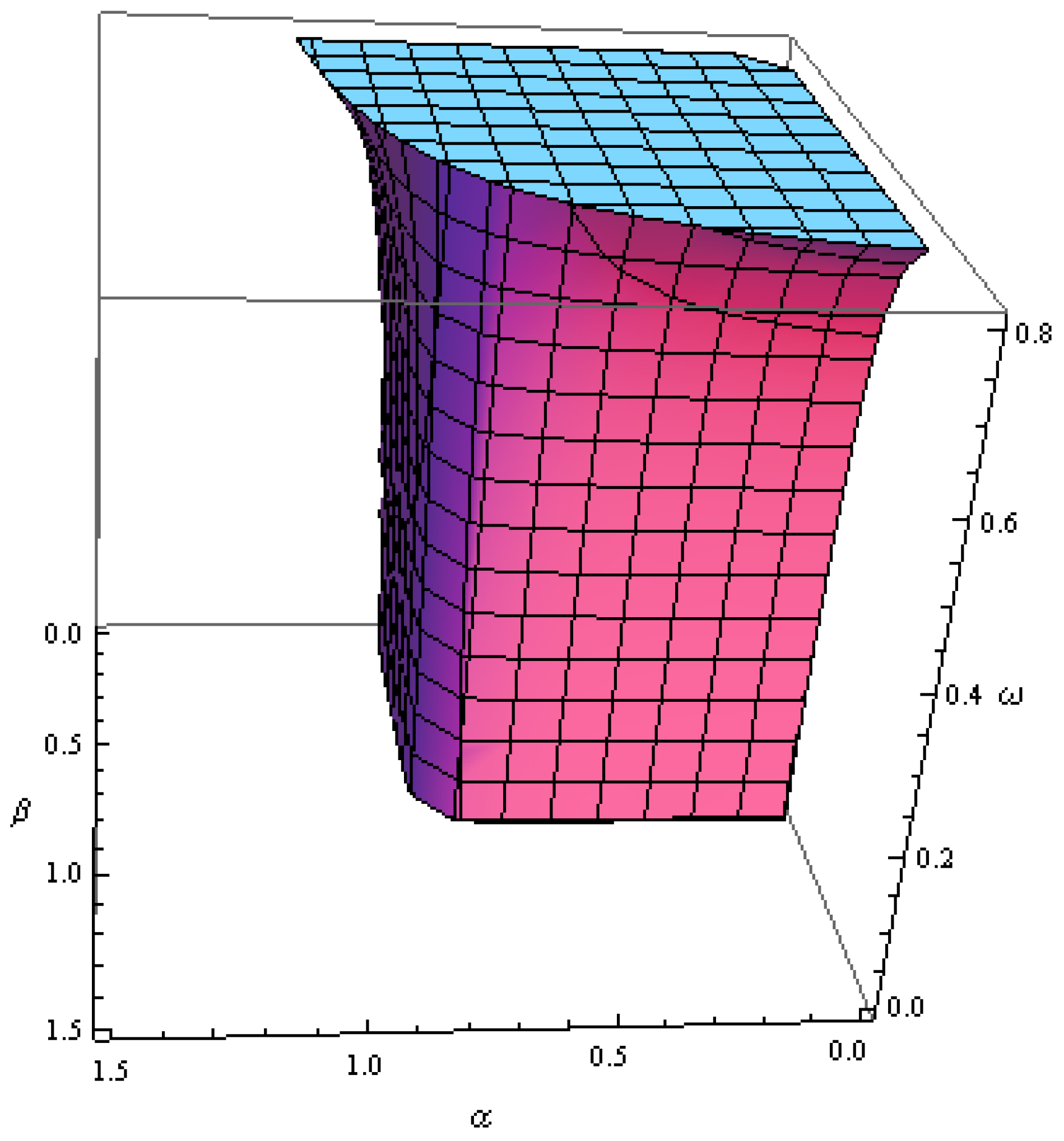
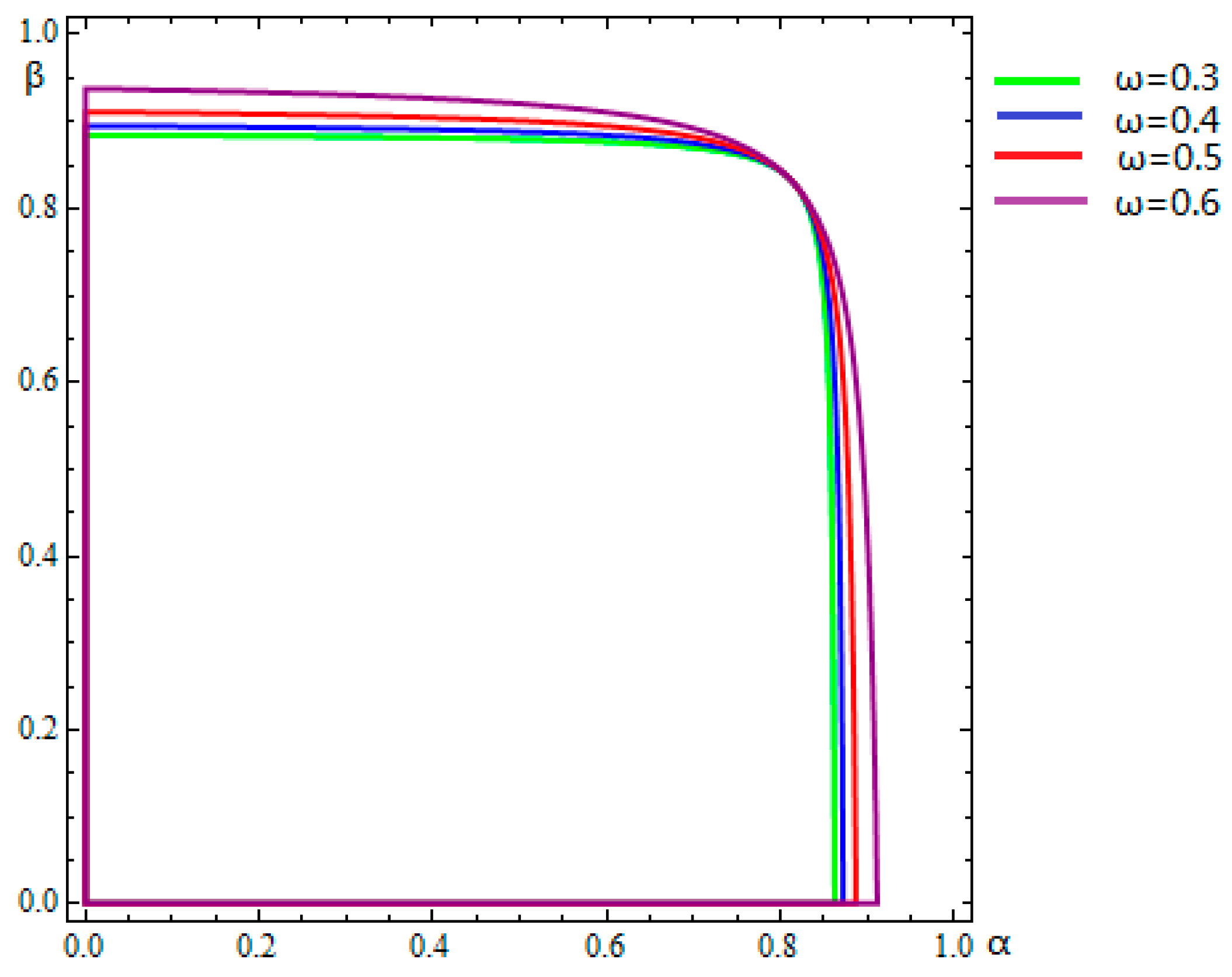
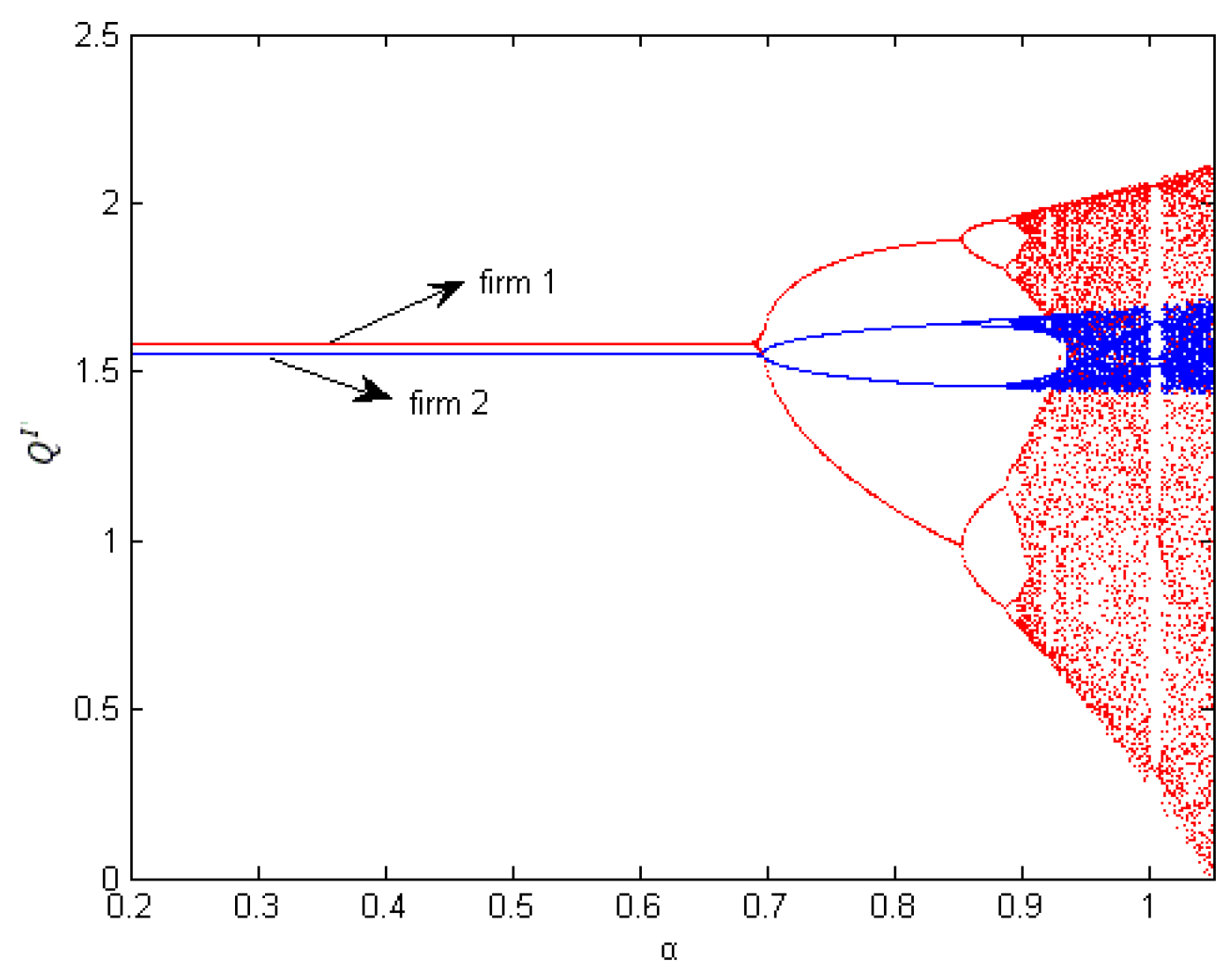
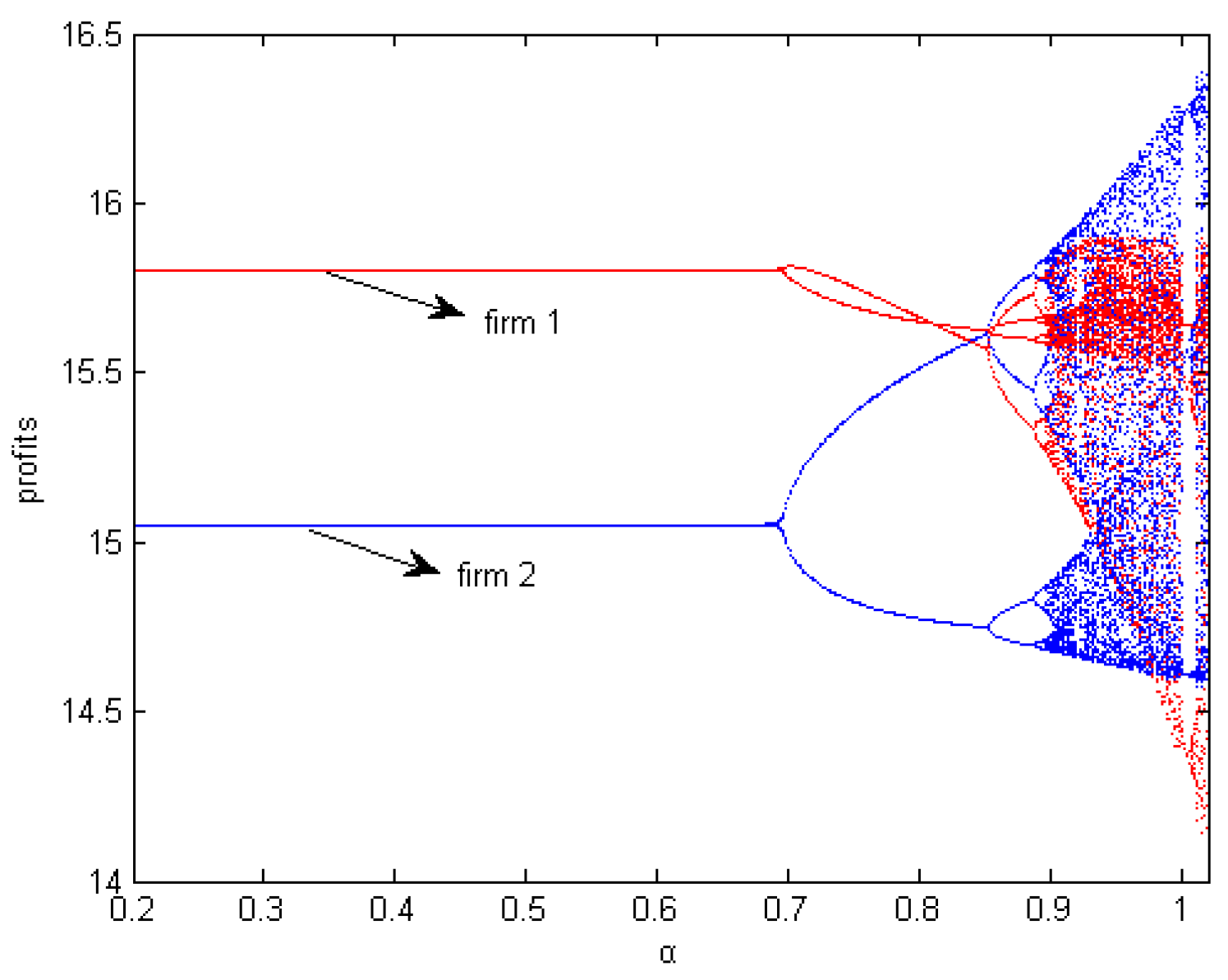
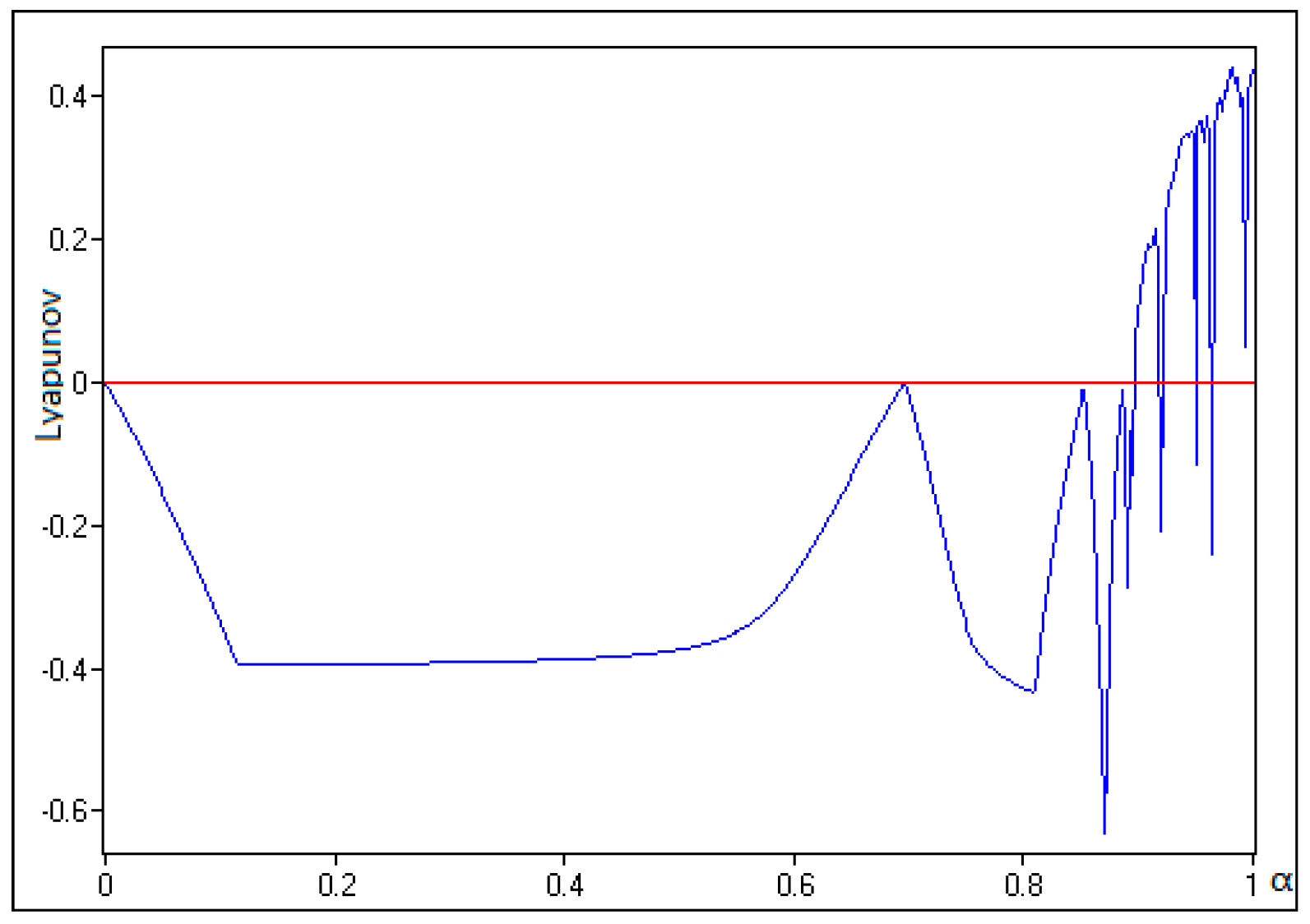
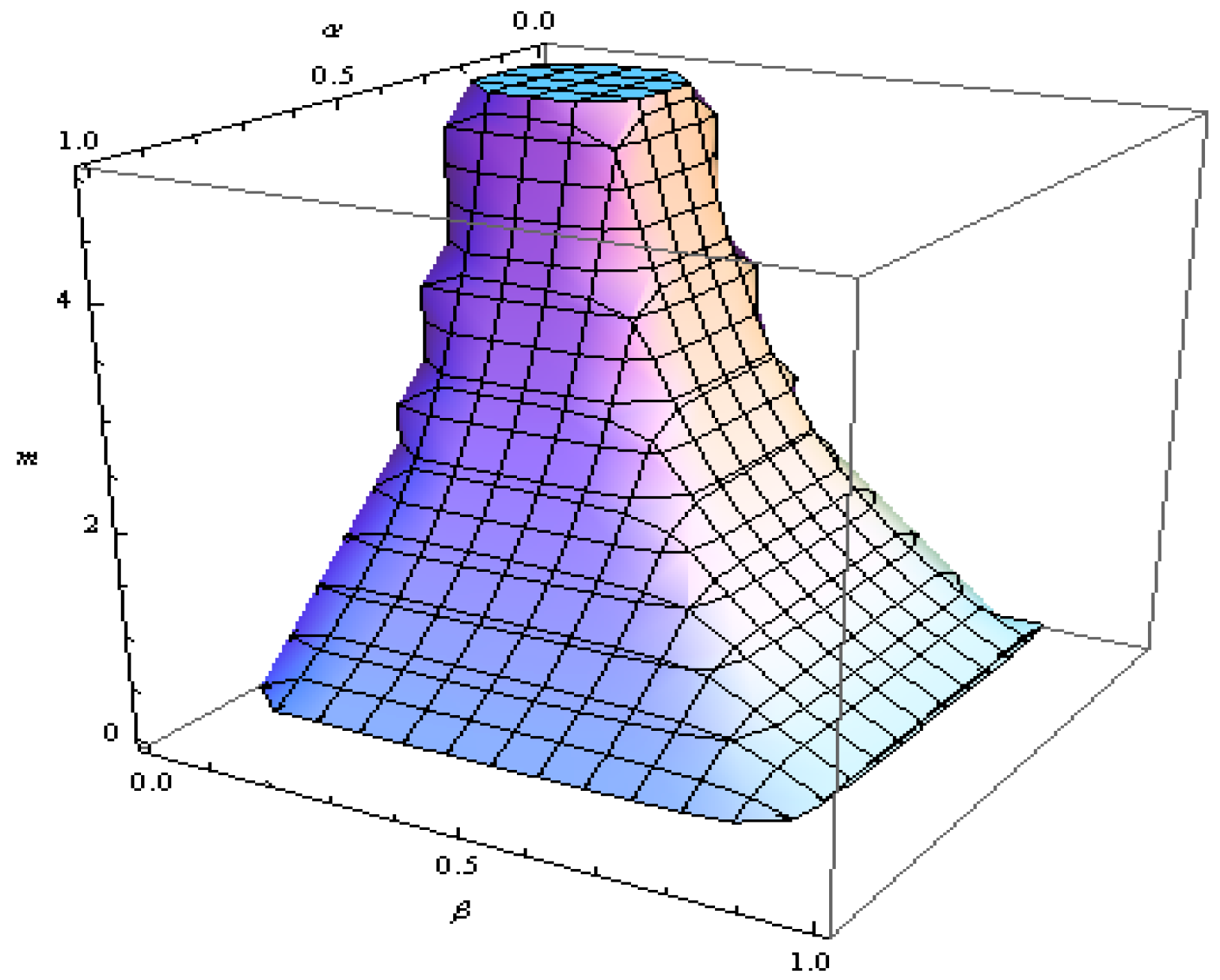
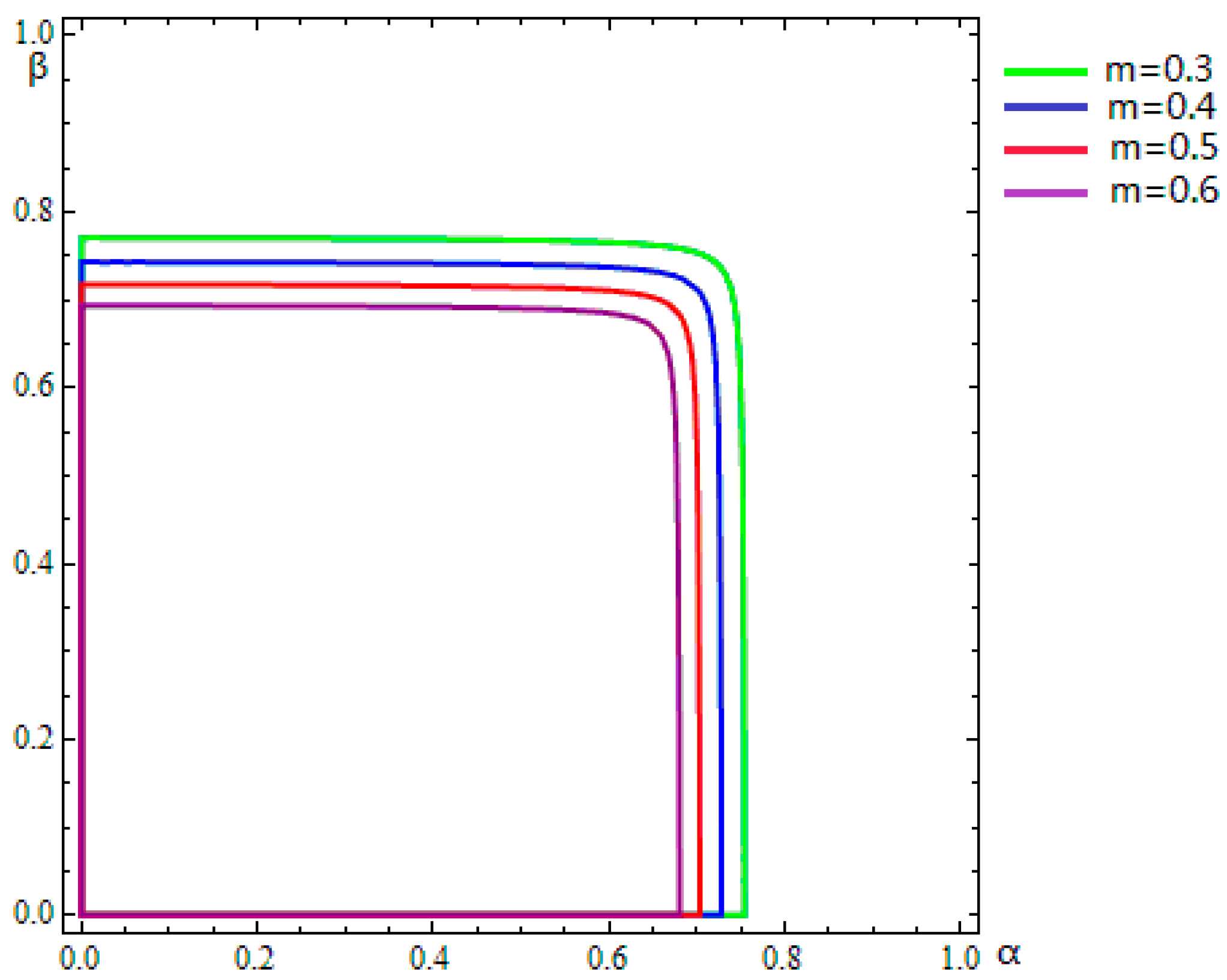
- In the aspect of stability of the system, the system will bifurcate and even fall into chaos with increasing entropy when taking large decision parameters in both models. Besides, the subsidy rate and subsidy coefficient can both affect the stability region of the system. What is different is that the increase of the subsidy rate can enhance the stability of the system while the increase of the subsidy coefficient will weaken the stability of the system and increase entropy.
5. Conclusions
- (1)
- Both kinds of innovation subsidy policies proposed in this paper have positive effects on firms’ innovation activities. Therefore, the government can increase firms’ enthusiasm for innovation by giving an appropriate government subsidy, which is beneficial to build a good innovative economic environment.
- (2)
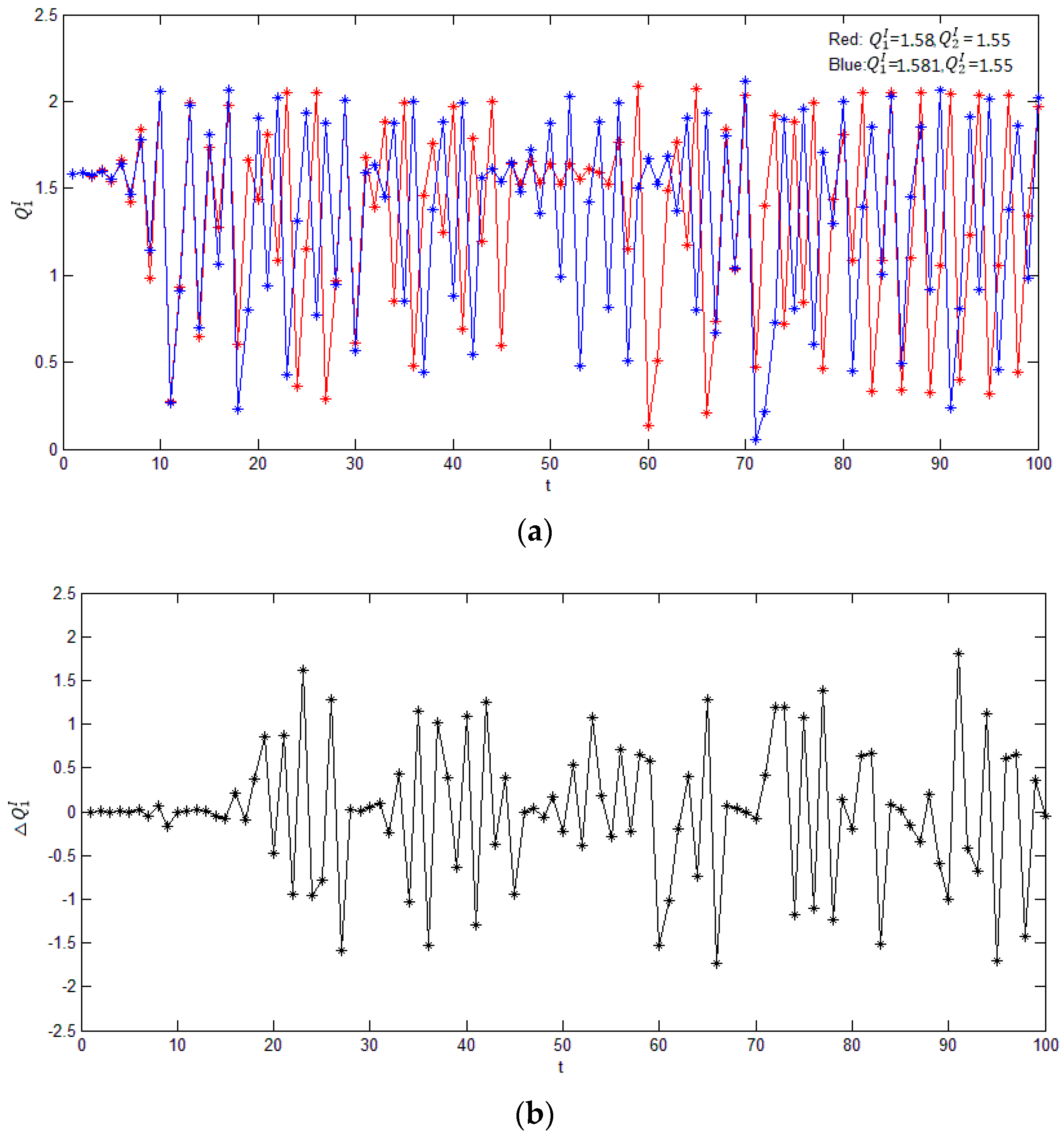
- Assumed to be bounded rationally, the two firms make decisions of innovation outputs according to the marginal profit effect, but in the decision making process, the decision parameters should not be too large, or the system will fall into the unstable state where decisions fluctuate disorderly and the entropy of the system will increase which means the companies will need more information to make an optimal decision.
- (3)
- The degree of the government innovation subsidies will impact the stability of the system. Under the subsidy policy based on the innovation inputs, the increase in subsidy rate can decrease the entropy and enhance the stability of the system, but under the subsidy policy based on the innovation outputs, the increase in the subsidy coefficient will increase the entropy and weaken the stability of the system, so the government should synthetically consider the effect of the innovation subsidy on innovation incentives, the stability of the system, the budget of fiscal expenditure and the social benefits, and then decide a rational subsidy rate or subsidy coefficient .
- (4)
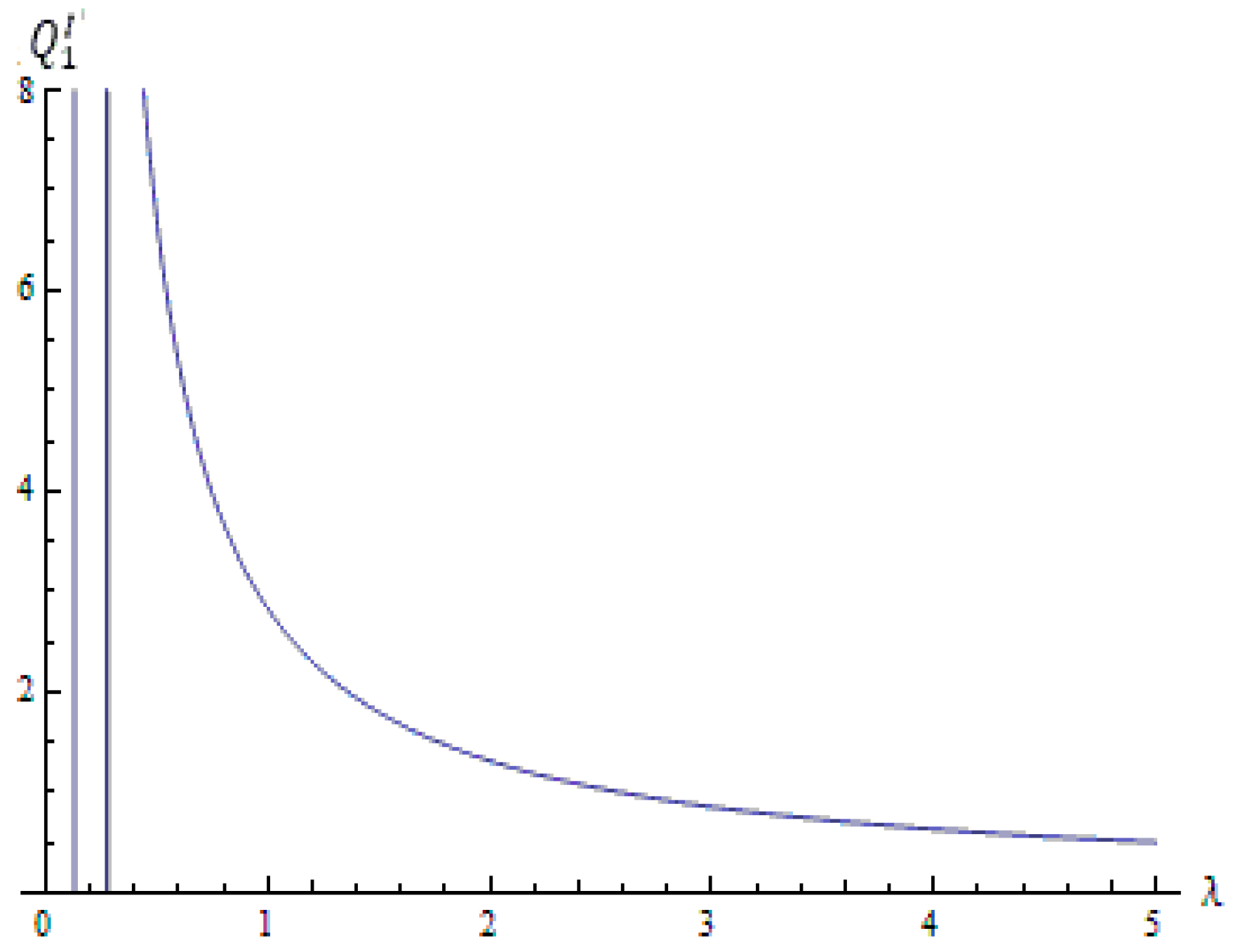
- The innovation input parameter measures the benefits brought by innovation acticities, and the smaller is , the more benefits firms will obtain from the same investment in innovation, which means a higher level of inovation. The results derived from both models in this paper indicate that firms are more willing to engage in innovation when is small, so we advise that countries should support the cultivation of innovative talents and firms can improve their innovation ability by introducing talents, which will improve the earning of innovation and the innovation level of the whole society.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- González, X.; Pazó, C. Firms’ R&D dilemma: To undertake or not to undertake R&D. Appl. Econ. Lett. 2004, 11, 55–59. [Google Scholar]
- Hasnas, I.; Lambertini, L.; Palestini, A. Open Innovation in a dynamic Cournot duopoly. Econ. Model. 2014, 36, 79–87. [Google Scholar] [CrossRef]
- Toivanen, O.; Stoneman, P.; Bosworth, D. Innovation and the market value of UK firms. 1989–1995. Oxf. Bull. Econ. Stat. 2002, 64, 39–61. [Google Scholar] [CrossRef]
- Li, T.; Ma, J. The complex dynamics of R&D competition models of three oligarchs with heterogeneous players. Nonlinear Dyn. 2013, 74, 45–54. [Google Scholar]
- Fontana, R.; Nesta, L. Product innovation and survival in a high-tech industry. Rev. Ind. Organ. 2009, 34, 287–306. [Google Scholar] [CrossRef]
- Lambertini, L.; Mantovani, A. Process and product innovation: A differential game approach to product life cycle. Int. J. Econ. Theory 2010, 6, 227–252. [Google Scholar] [CrossRef]
- Park, S. Evaluating the efficiency and productivity change within government subsidy recipients of a national technology innovation research and development program. R&D Manag. 2015, 45, 549–568. [Google Scholar]
- Catozzella, A.; Vivarelli, M. Beyond Additionality: Are Innovation Subsidies Counterproductive; Social Science Electronic Publishing: Rochester, NY, USA, 2011. [Google Scholar]
- Huang, Q.; Jiang, M.S.; Miao, J. Effect of government subsidization on Chinese industrial firms’ technological innovation efficiency: A stochastic frontier analysis. J. Bus. Econ. Manag. 2016, 17, 187–200. [Google Scholar] [CrossRef]
- Fölster, S. Do subsidies to cooperative R&D actually stimulate R&D investment and cooperation? Res. Policy 1995, 24, 403–417. [Google Scholar]
- Un, C.A.; Montoro-Sanchez, A. Public funding for product, process and organisational innovation in service industries. Serv. Ind. J. 2010, 30, 133–147. [Google Scholar] [CrossRef]
- Kang, K.N.; Park, H. Influence of government R&D support and inter-firm collaborations on innovation in Korean biotechnology SMEs. Technovation 2012, 32, 68–78. [Google Scholar]
- Guo, D.; Guo, Y.; Jiang, K. Government-subsidized R&D and firm innovation: Evidence from China. Res. Policy 2016, 45, 1129–1144. [Google Scholar]
- Hinloopen, J. Subsidizing cooperative and noncooperative R&D in duopoly with spillovers. J. Econ. 1997, 66, 151–175. [Google Scholar]
- Hinloopen, J. More on subsidizing cooperative and noncooperative R&D in duopoly with spillovers. J. Econ. 2000, 72, 295–308. [Google Scholar]
- Kleer, R. Government R&D subsidies as a signal for private investors. Res. Policy 2010, 39, 1361–1374. [Google Scholar]
- Lerner, J. The government as venture capitalist: The long-run impact of the SBIR program. J. Priv. Equity 2000, 3, 55–78. [Google Scholar] [CrossRef]
- Meuleman, M.; de Maeseneire, W. Do R&D subsidies affect SMEs’ access to external financing? Res. Policy 2012, 41, 580–591. [Google Scholar]
- Takalo, T.; Tanayama, T. Adverse selection and financing of innovation: Is there a need for R&D subsidies? J. Technol. Transf. 2010, 35, 16–41. [Google Scholar]
- Zapart, C.A. On entropy, financial markets and minority games. Phys. A Stat. Mech. Appl. 2009, 388, 1157–1172. [Google Scholar] [CrossRef]
- Han, Z.; Ma, J.; Si, F.; Ren, W. Entropy complexity and stability of a nonlinear dynamic game model with two delays. Entropy 2016, 18, 317. [Google Scholar] [CrossRef]
- D’Aspremont, C.; Jacquemin, A. Cooperative and noncooperative R&D in duopoly with spillovers. Am. Econ. Rev. 1988, 78, 1133–1137. [Google Scholar]
- Bischi, G.I.; Lamantia, F. A competition game with knowledge accumulation and spillovers. Int. Game Theory Rev. 2004, 6, 323–341. [Google Scholar] [CrossRef]
- López, M.C.; Naylor, R.A. The Cournot–Bertrand profit differential: A reversal result in a differentiated duopoly with wage bargaining. Eur. Econ. Rev. 2004, 48, 681–696. [Google Scholar] [CrossRef]
- Symeonidis, G. Downstream merger and welfare in a bilateral oligopoly. Int. J. Ind. Organ. 2010, 28, 230–243. [Google Scholar] [CrossRef]
























© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Sui, X.; Li, L. Measurement on the Complexity Entropy of Dynamic Game Models for Innovative Enterprises under Two Kinds of Government Subsidies. Entropy 2016, 18, 424. https://doi.org/10.3390/e18120424
Ma J, Sui X, Li L. Measurement on the Complexity Entropy of Dynamic Game Models for Innovative Enterprises under Two Kinds of Government Subsidies. Entropy. 2016; 18(12):424. https://doi.org/10.3390/e18120424
Chicago/Turabian StyleMa, Junhai, Xinyan Sui, and Lei Li. 2016. "Measurement on the Complexity Entropy of Dynamic Game Models for Innovative Enterprises under Two Kinds of Government Subsidies" Entropy 18, no. 12: 424. https://doi.org/10.3390/e18120424
APA StyleMa, J., Sui, X., & Li, L. (2016). Measurement on the Complexity Entropy of Dynamic Game Models for Innovative Enterprises under Two Kinds of Government Subsidies. Entropy, 18(12), 424. https://doi.org/10.3390/e18120424