
Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System


Abstract
:1. Introduction
2. Materials and Methods
2.1. Electric Car and Battery Pack
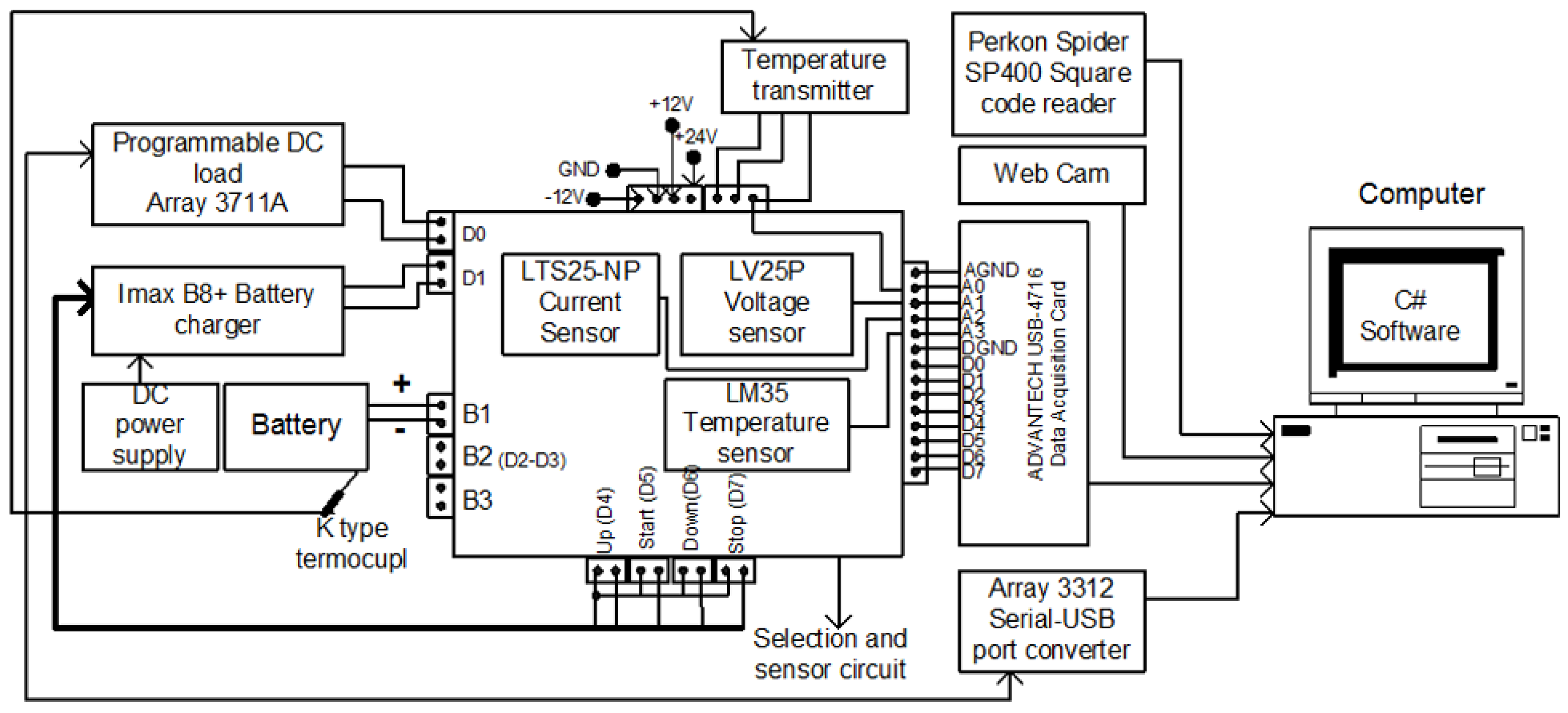
2.2. Experimental Setup
2.3. Graphical User Interface
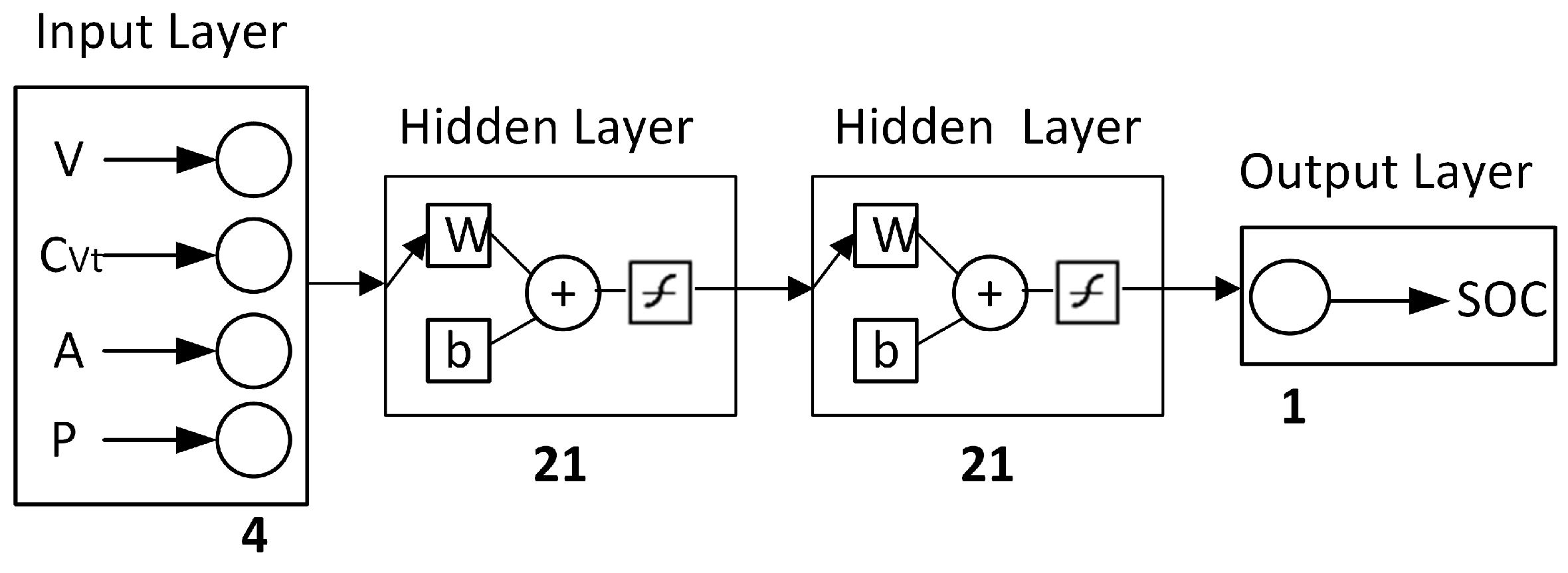
2.4. Artificial Neural Network
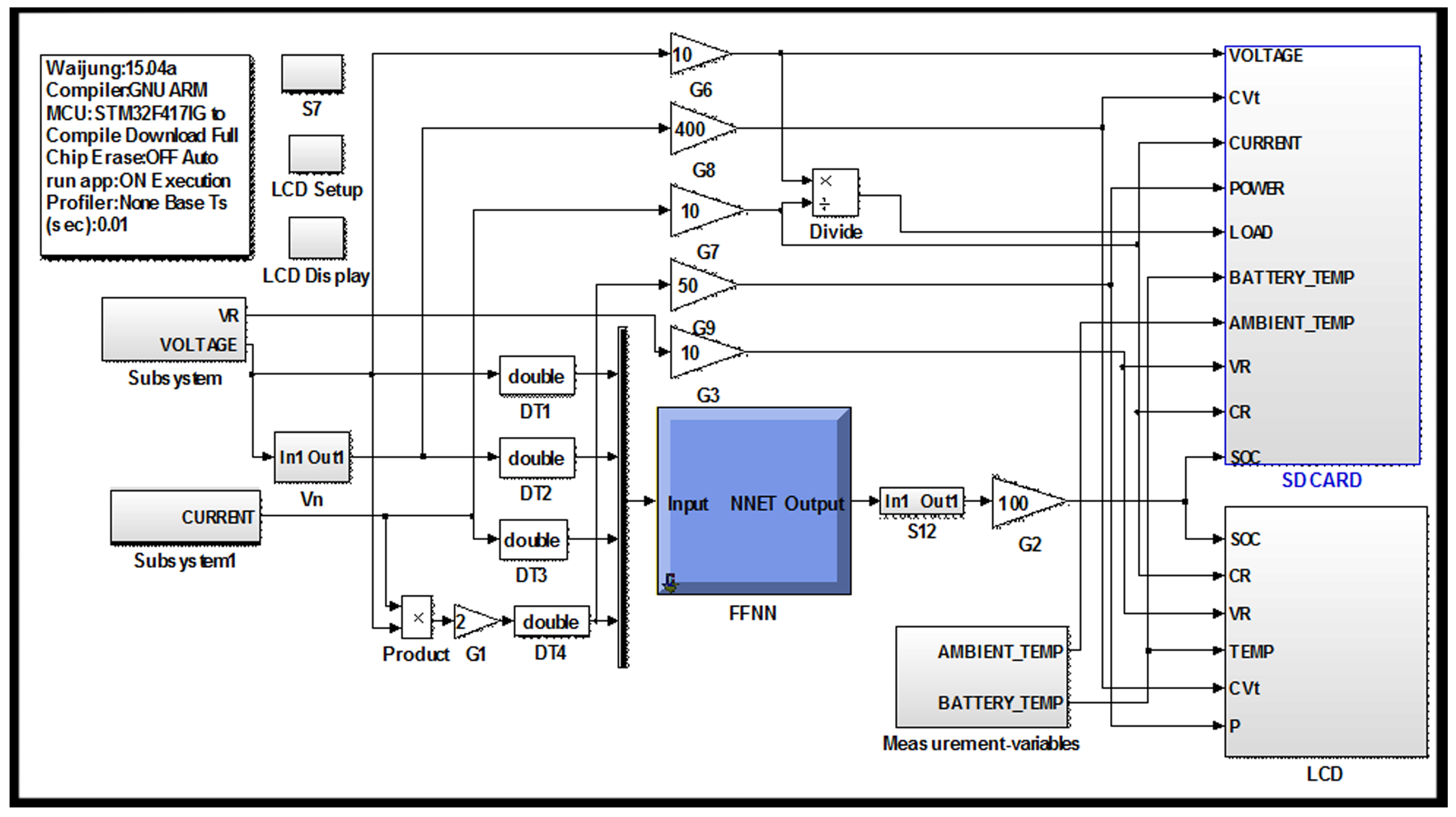
2.5. Embedded System Based SOC Prediction
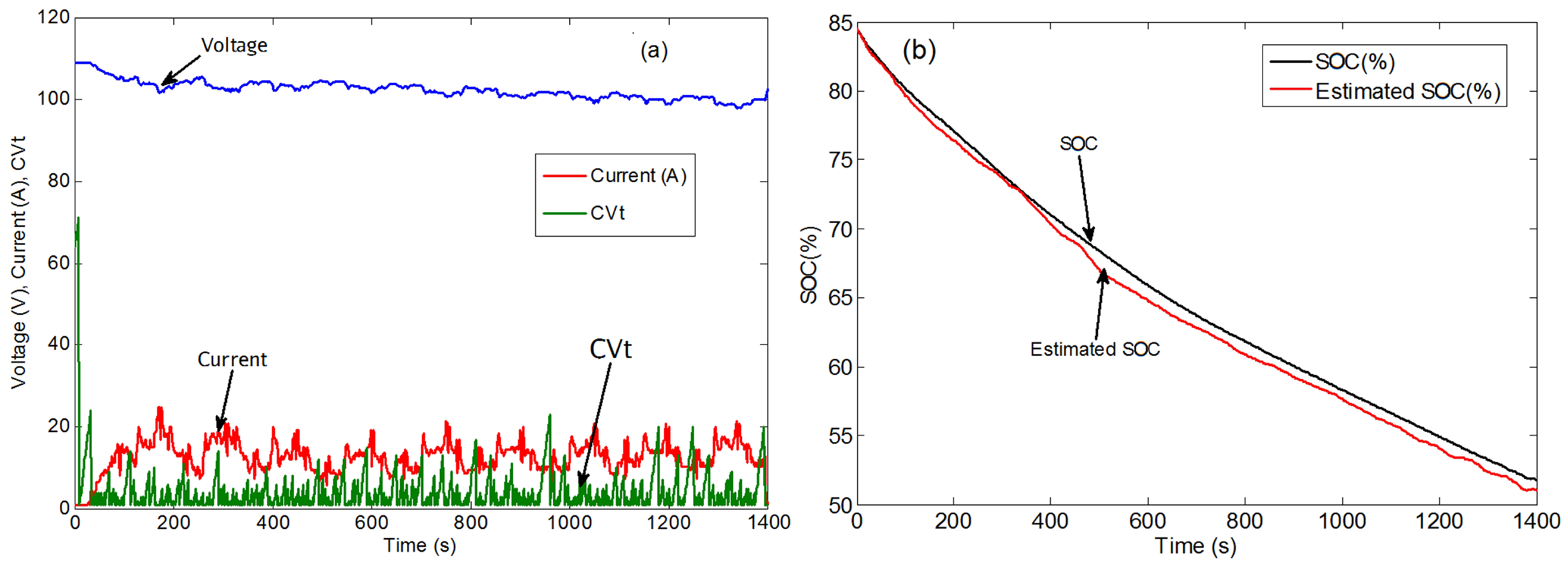
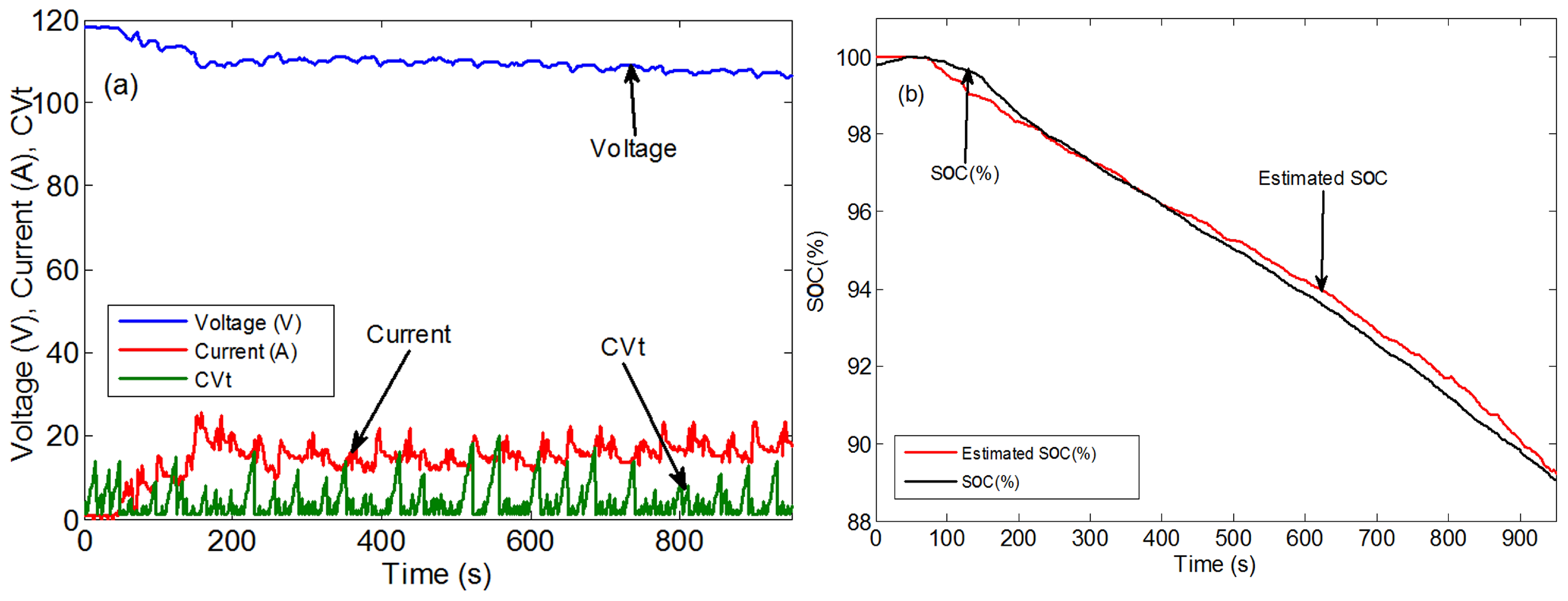
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| VRLA | Valve regulated lead acid |
| BMS | Battery management system |
| SOC | State of charge |
| FFNN | Feed forward neural network |
| DAQ | Data acquisition card |
| NN | Neural network |
| LCD | Liquid crystal display |
| ANN | Artificial neural network |
| AC | Alternative current |
| DC | Direct current |
| LCD | Liquid Crystal Display |
| SD | Secure Digital |
References
- Dhameja, S. Electric Vehicle Battery Systems; Newnes: Boston, MA, USA, 2002; pp. 1–21. [Google Scholar]
- Wakihara, M. Recent developments in lithium ion batteries. Mater. Sci. Eng. R Rep. 2001, 33, 109–134. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- He, H.; Zhang, X.; Xiong, R.; Xu, Y.; Guo, H. Online model-based estimation of state-of-charge and open-circuit voltage of lithium-ion batteries in electric vehicles. Energy 2012, 39, 310–318. [Google Scholar] [CrossRef]
- Bhangu, B.S.; Bentley, P.; Stone, D.A.; Bingham, C.M. Nonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehicles. IEEE Trans. Veh. Technol. 2005, 54, 783–794. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Divakar, B.P.; Wu, H.; Ding, K.; Ho, H.F. Battery-management system (BMS) and SOC development for electrical vehicles. IEEE Trans. Veh. Technol. 2011, 60, 76–88. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Sato, S.; Kawamura, A. A new estimation method of state of charge using terminal voltage and internal resistance for lead acid battery. In Proceedings of the Power Conversion Conference (PCC-Osaka 2002), Osaka, Japan, 2–5 April 2002; Volume 2, pp. 565–570. [Google Scholar]
- Rodrigues, S.; Munichandraiah, N.; Shukla, A.K. A review of state-of-charge indication of batteries by means of a.c. impedance measurements. J. Power Sources 2000, 87, 12–20. [Google Scholar] [CrossRef]
- Hammouche, A.; Karden, E.; Doncker, R.W. De Monitoring state-of-charge of Ni–MH and Ni–Cd batteries using impedance spectroscopy. J. Power Sources 2004, 127, 105–111. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Cai, C.; Du, D.; Liu, Z.; Ge, J. State-of-charge (SOC) estimation of high power Ni-MH rechargeable battery with artificial neural network. In Proceedings of the 9th International Conference on Neural Information Processing (ICONIP ’02), Singapore, 18–22 November 2002; Volume 2, pp. 824–828. [Google Scholar]
- Peng, J.; Chen, Y.; Eberhart, R. Battery pack state of charge estimator design using computational intelligence approaches. In Proceedings of the Fifteenth Annual Battery Conference on Applications and Advances, Beach, CA, USA, 11–14 January 2000; pp. 173–177. [Google Scholar]
- Shen, Y. Adaptive online state-of-charge determination based on neuro-controller and neural network. Energy Convers. Manag. 2010, 51, 1093–1098. [Google Scholar] [CrossRef]
- Hansen, T.; Wang, C.-J. Support vector based battery state of charge estimator. J. Power Sources 2005, 141, 351–358. [Google Scholar] [CrossRef]
- Li, I.-H.; Wang, W.-Y.; Su, S.-F.; Lee, Y.-S. A Merged Fuzzy Neural Network and Its Applications in Battery State-of-Charge Estimation. IEEE Trans. Energy Convers. 2007, 22, 697–708. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of Li-ion batteries based on multi-model switching strategy. Appl Energy 2015, 137, 427–434. [Google Scholar] [CrossRef]
- Chang, W.-Y. The State of Charge Estimating Methods for Battery: A Review. ISRN Appl. Math. 2013, 2013, 1–7. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, X.; Zhang, C.; Chen, Z. A method for state of energy estimation of lithium-ion batteries based on neural network model. Energy 2015, 90, 879–888. [Google Scholar] [CrossRef]
- Chang, W.Y. State of charge estimation for LiFePO4 battery using artificial neural network. Int. Rev. Electr. Eng. 2012, 7, 5874–5880. [Google Scholar]
- Aurbach, D.; Talyosef, Y.; Markovsky, B.; Markevich, E.; Zinigrad, E.; Asraf, L.; Gnanaraj, J.S.; Kim, H.-J. Design of electrolyte solutions for Li and Li-ion batteries: A review. Electrochim. Acta 2004, 50, 247–254. [Google Scholar] [CrossRef]
- Besenhard, J.O.; Yang, J.; Winter, M. Will advanced lithium-alloy anodes have a chance in lithium-ion batteries? J. Power Sources 1997, 68, 87–90. [Google Scholar] [CrossRef]
- Zhang, S.S. A review on electrolyte additives for lithium-ion batteries. J. Power Sources 2006, 162, 1379–1394. [Google Scholar] [CrossRef]
- Van Schalkwijk, W.; Bruno, S. Advances in Lithium Ion Batteries Introduction; Springer: Boston, MA, USA, 2002; pp. 1–5. [Google Scholar]
- Nishi, Y. Lithium ion secondary batteries; past 10 years and the future. J. Power Sources 2001, 100, 101–106. [Google Scholar] [CrossRef]
- Weigert, T.; Tian, Q.; Lian, K. State-of-charge prediction of batteries and battery–supercapacitor hybrids using artificial neural networks. J. Power Sources 2011, 196, 4061–4066. [Google Scholar] [CrossRef]
- Piller, S.; Perrin, M.; Jossen, A. Methods for state-of-charge determination and their applications. J. Power Sources 2001, 96, 113–120. [Google Scholar] [CrossRef]
- Soylu, E.; Bayir, R. Measurement of Electrical Conditions of Rechargeable Batteries. Meas. Control 2016, 49, 72–81. [Google Scholar] [CrossRef]
- Grewal, S.; Grant, D.A. A novel technique for modelling the state of charge of lithium ion batteries using artificial neural networks. In Proceedings of the Twenty-Third International Telecommunications Energy Conference (INTELEC 2001), London, UK, 14–18 October 2001; pp. 174–179. [Google Scholar]
- Uysal, A.; Bayir, R. Real-time condition monitoring and fault diagnosis in switched reluctance motors with Kohonen neural network. J. Zhejiang Univ. Sci. C 2013, 14, 941–952. [Google Scholar] [CrossRef]
- Shen, W.X.; Chan, C.C.; Lo, E.W.C.; Chau, K.T. A new battery available capacity indicator for electric vehicles using neural network. Energy Convers. Manag. 2002, 43, 817–826. [Google Scholar] [CrossRef]
- TÜBİTAK Efficiency Challenge Electric Vehicle. Available online: http://challenge.tubitak.gov.tr/ (accessed on 3 January 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Property | Specifications |
|---|---|---|
| 1 | Motor | Two permanent magnet brushless DC motors |
| 2 | Motor driver | Siemens S7 1200 (Siemens, Munich, Germany) programmable logic controller |
| 3 | Chassis | Aluminum chassis |
| 4 | Shell | Carbon fiber shell |
| 5 | Weight | 237 kg |
| 6 | Driving range | 100 km |
| 7 | Maximum speed | 97 km/h |
| 8 | Charging unit | 220V AC input and built-in the car. |
| 9 | Other | Electronic differential, a telemetry system, black box, the dynamic headlight system |
| Specifications | Single Cell | Battery Pack |
|---|---|---|
| Rated Capacity | 3.2 Ah | 25.6 Ah |
| Nominal voltage | 3.6 V | 100.8 |
| Charging voltage | 4.2 V | 117.6 |
| Cut-off voltage | 2.5 V | 70 V |
| Charging current | 1.625 A | 13 A |
| C Rate | 2 | 2 |
| Time (s) | Voltage (V) | Current (A) | Power (W) | SOC (%) | |
|---|---|---|---|---|---|
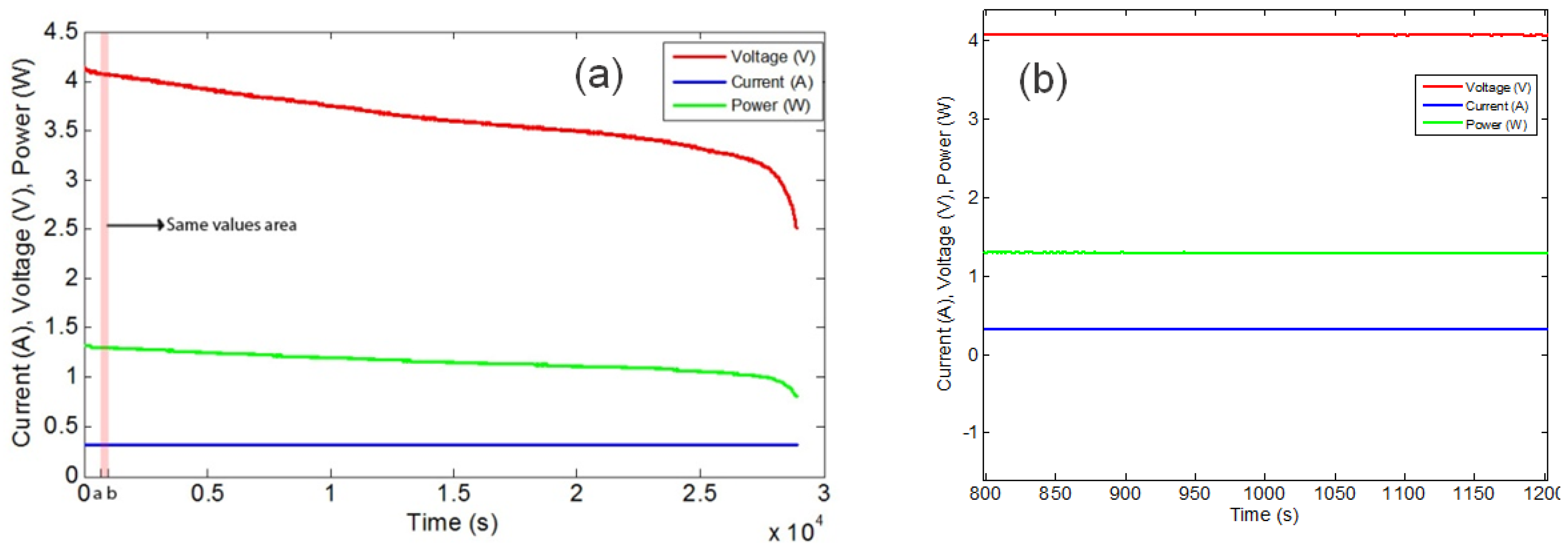
| 400 | 4.07 | 0.32 | 1.3 | 1 | 96.9 |
| 1200 | 4.07 | 0.32 | 1.3 | 400 | 95.3 |
| Training Parameters | Value |
|---|---|
| Training | Levenberg–Marquardt |
| Performance | Mean Squared Error |
| Epoch | 293 |
| Time | 1338 s |
| Performance | 7.06 × |
| Gradient | 9.45 × |
| Mu | 0.001 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soylu, E.; Soylu, T.; Bayir, R. Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System. Entropy 2017, 19, 146. https://doi.org/10.3390/e19040146
Soylu E, Soylu T, Bayir R. Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System. Entropy. 2017; 19(4):146. https://doi.org/10.3390/e19040146
Chicago/Turabian StyleSoylu, Emel, Tuncay Soylu, and Raif Bayir. 2017. "Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System" Entropy 19, no. 4: 146. https://doi.org/10.3390/e19040146
APA StyleSoylu, E., Soylu, T., & Bayir, R. (2017). Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System. Entropy, 19(4), 146. https://doi.org/10.3390/e19040146