Conformity, Anticonformity and Polarization of Opinions: Insights from a Mathematical Model of Opinion Dynamics


Abstract
:1. Introduction
2. Materials and Methods
2.1. Basic Assumptions
2.2. The “Old” (Quenched Disorder) Model
- Pick a target spinson at random (uniformly from nodes).
- Build its influence group by randomly choosing q neighboring agents.
- Convert the states of the neighbors into signals that may be received by the target. Assume that the signals of the neighbors from the target’s clique are equal to their states. Invert the states when from the other clique.
- Calculate the total signal of the influence group by summing up individual signals of its members.
- If the total signal is equal to (i.e., all group members emit the same signal), the target changes its opinion accordingly. Otherwise, nothing happens.
2.3. New (“Annealed”) Version of the Model
- Pick a target spinson at random (uniformly from nodes).
- Build its influence group by randomly choosing q agents. In the quenched disorder model, we simply followed 4 randomly-chosen links of the target to achieve that. Due to the setup of that model, some targets usually had no cross-connections, some others-multiple ones. Now, the situation is different: each target has the same probability of being cross-connected, and the actual links to other agents have to be built first. Thus, for each member of the influence group, we decide first which clique it will belong to (with probability to the target’s clique, with p to the other one). Then, we choose the member randomly from the appropriate clique (see Figure 3).
- Convert the states of the group members into signals.
- Calculate the total signal of the influence group.
- If the total signal is equal to (i.e., all group members emit the same signal), the target changes its opinion accordingly. Otherwise, nothing happens.
- : positive consensus in clique X, i.e., all agents in that clique are in state ,
- : partial positive ordering in clique X, i.e., the majority of agents is in state ,
- : no ordering in clique X, i.e., the numbers of agents in state and are equal,
- : partial negative ordering in clique X, i.e., the majority of agents are in state ,
- : negative consensus in clique X, i.e., all agents in that clique are in state .
2.3.1. Transition Probabilities
- a target from clique A is chosen (probability ),
- the target is in state (probability ),
- it flips, i.e., an influence group emitting signal is chosen.
- a target from clique A is chosen (probability ),
- the target is in state (probability ),
- it flips, i.e., an influence group emitting signal is chosen.
2.3.2. Asymptotic Dynamical System
2.3.3. Annealed Model as a Birth-Death Process
3. Results
3.1. Direction Fields and Stationary Points
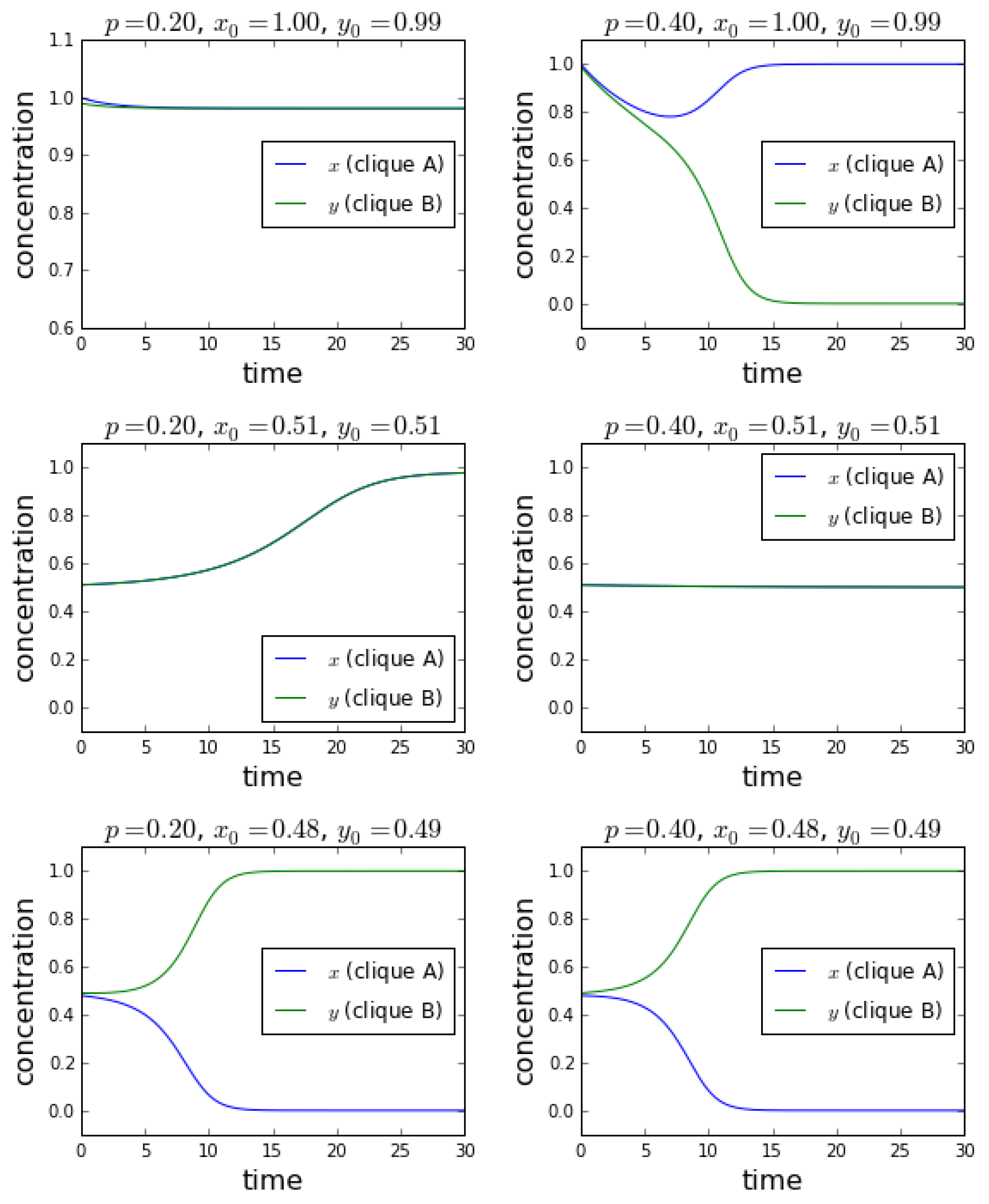
3.2. Time Evolution of the Asymptotic System
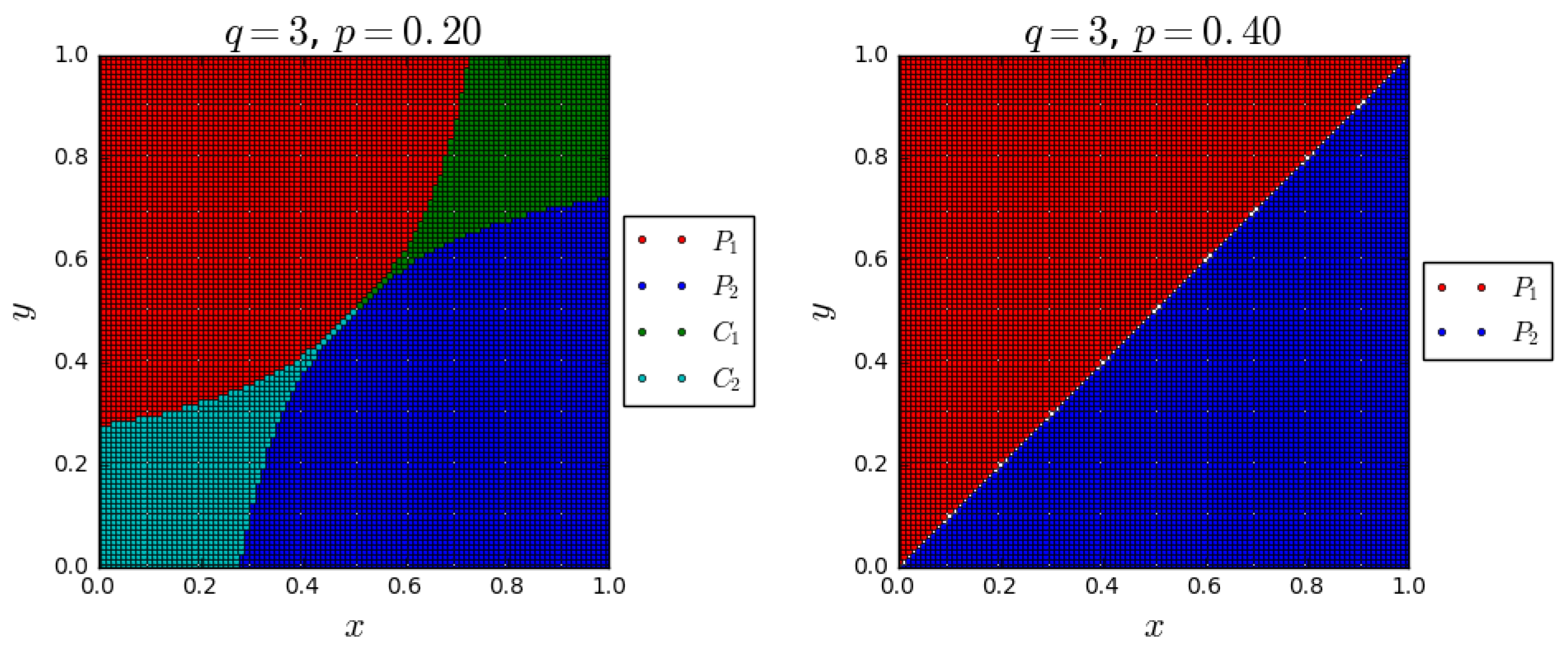
3.3. Basins of Attraction
3.4. Correlation between Cliques
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Critical Values of p in Case q = 2
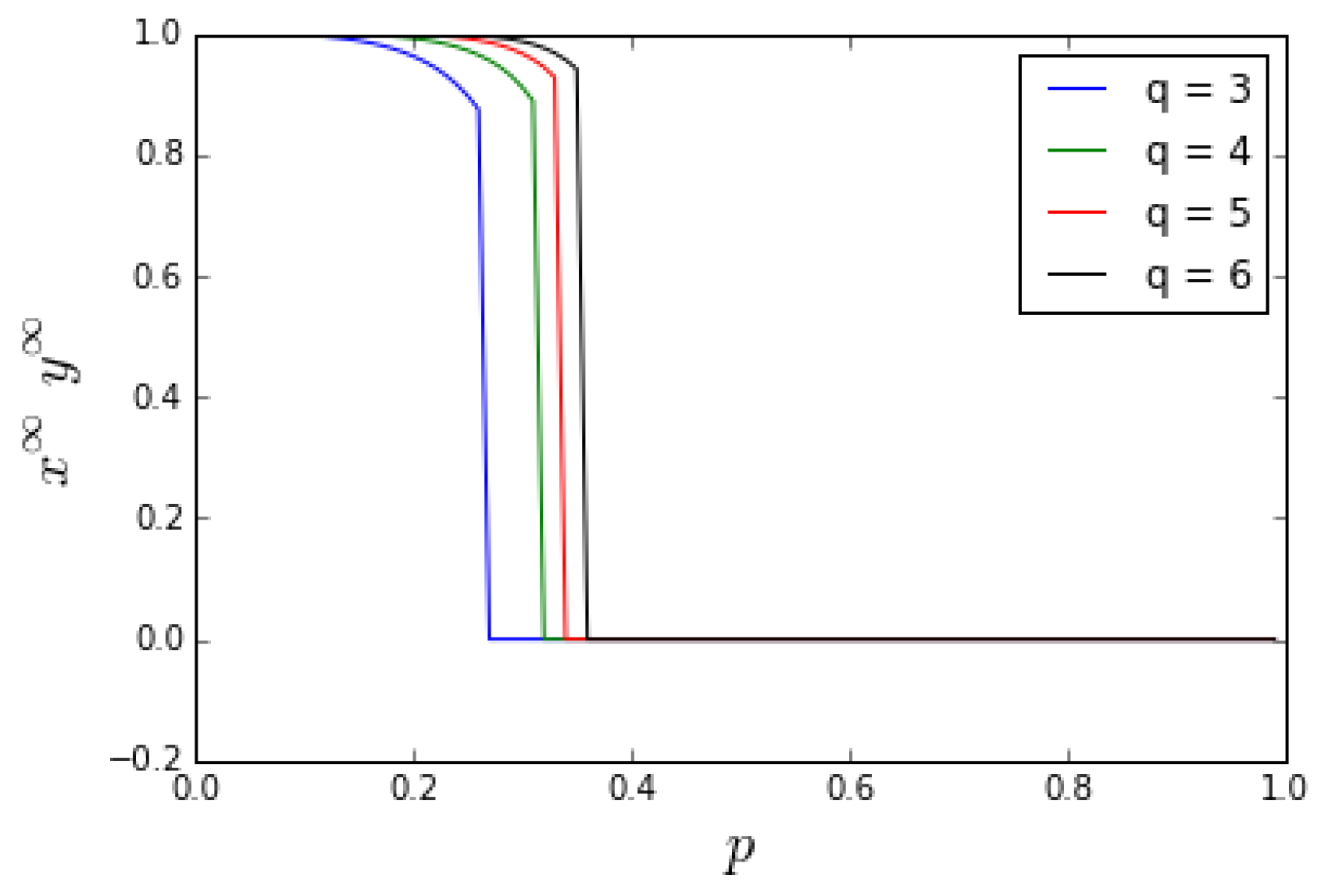
Appendix B. Second Critical Value of p for General q
Appendix C. Supplementary Materials
References
- Taber, C.S.; Lodge, M. Motivated Skepticism in the Evaluation of Political Beliefs. Am. J. Political Sci. 2006, 50, 755–769. [Google Scholar] [CrossRef]
- Wojcieszak, M.; Price, V. Bridging the Divide or Intensifying the Conflict? How Disagreement Affects Strong Predilections about Sexual Minorities. Political Psychol. 2010, 31, 315–339. [Google Scholar] [CrossRef]
- Mouw, T.; Sobel, M. Culture Wars and Opinion Polarization: The Case of Abortion. Am. J. Sociol. 2001, 106, 913–943. [Google Scholar] [CrossRef]
- Binder, A.R.; Dalrymple, K.E.; Brossard, D.; Scheufele, D.A. The Soul of a Polarized Democracy. Commun. Res. 2009, 36, 315–340. [Google Scholar] [CrossRef]
- McCright, A.M.; Dunlap, R.E. The politization of climate change and polarization in the American public’s views of global warming. Sociol. Quart. 2011, 52, 2001–2010. [Google Scholar]
- Meffert, M.F.; Chung, S.; Joiner, A.J.; Waks, L.; Garst, J. The Effects of Negativity and Motivated Information Processing During a Political Campaign. J. Commun. 2006, 56, 27–51. [Google Scholar] [CrossRef]
- Seeberg, P. Strategic Patience and EU Reform-Support. EU and the ‘Arab Spring’: The State of Play after Three Years. Eur. Foreign Aff. Rev. 2014, 19, 453–470. [Google Scholar]
- DiMaggio, P.; Evans, J.; Bryson, B. Have American’s Social Attitudes Become More Polarized? Am. J. Sociol. 1996, 102, 690–755. [Google Scholar] [CrossRef]
- Mäs, M.; Flache, A. Differentiation without Distancing. Explaining Bi-Polarization of Opinions without Negative Influence. PLoS ONE 2013, 8, e74516. [Google Scholar] [CrossRef] [PubMed]
- Isenberg, D.J. Group polarization: A critical review and meta-analysis. J. Personal. Soc. Psychol. 1986, 50, 1141–1151. [Google Scholar] [CrossRef]
- Sunstein, C.R. The Law of Group Polarization. J. Political Philos. 2002, 10, 175–195. [Google Scholar] [CrossRef]
- Walton, D. Bias, critical doubt, and fallacies. Argum. Advocacy 1991, 28, 1–22. [Google Scholar]
- French, J.R.P. A formal theory of social power. Psychol. Rev. 1956, 68, 181–194. [Google Scholar] [CrossRef]
- Harary, F. A Criterion for Unanimity in French’s Theory of Social Power. In Studies in Social Power; Cartwright, D., Ed.; Institute for Social Research: Ann Arbor, MI, USA, 1959; pp. 168–182. [Google Scholar]
- Axelrod, R. The Dissemination of Culture. A Model with Local Convergence and Global Polarization. J. Confl. Resolut. 1997, 41, 203–226. [Google Scholar] [CrossRef]
- Hegselmann, R.; Krause, U. Opinion dynamics and bounded confidence: Models, analysis and simulation. J. Artif. Soc. Soc. Simul. 2002. Available online: http://jasss.soc.surrey.ac.uk/5/3/2/2.pdf (accessed on 18 July 2017).
- Macy, M.W.; Kitts, J.; Flache, A.; Benard, S. Polarization and Dynamic Networks. A Hopfield Model of Emergent Structure. In Dynamic Social Network Modeling and Analysis: Workshop Summary and Papers; Breiger, R., Carley, K., Pattison, P., Eds.; The National Academies Press: Washington, DC, USA, 2003; pp. 162–173. [Google Scholar]
- Iyengar, S.; Hahn, K.S. Red Media, Blue Media: Evidence of Ideological Selectivity in Media Use. J. Commun. 2009, 59, 19–39. [Google Scholar] [CrossRef]
- Stroud, N.J. Media use and political predispositions: Revisiting the concept of selective exposure. Political Behav. 2008, 30, 341–366. [Google Scholar] [CrossRef]
- Stroud, N.J. Polarization and partisan selective exposure. J. Commun. 2010, 60, 556–576. [Google Scholar] [CrossRef]
- Knobloch-Westerwick, S.; Meng, J. Reinforcement of the political self through selective exposure to political messages. J. Commun. 2011, 61, 349–368. [Google Scholar] [CrossRef]
- Garrett, R.K. Politically motivated reinforcement seeking. J. Commun. 2009, 59, 676–699. [Google Scholar] [CrossRef]
- Garrett, R.K.; Carnahan, D.; Lynch, E. A turn toward avoidance? Selective exposure to online political information, 2004–2008. Political Behav. 2011, 35, 113–134. [Google Scholar] [CrossRef]
- Gentzkow, M.; Shapiro, J.M. Ideological segregation online and offline. Quart. J. Econ. 2011, 126, 1799–1839. [Google Scholar] [CrossRef]
- Mutz, D.C.; Mondak, J.J. The workplace as a context for cross-cutting political discourse. J. Politics 2006, 68, 140–155. [Google Scholar] [CrossRef]
- Price, V.; Cappella, J.N.; Nir, L. Does disagreement contribute to more deliberative opinion? Political Commun. 2002, 19, 95–112. [Google Scholar] [CrossRef]
- Castellano, C.; Fortunato, S.; Loreto, V. Statistical physics of social dynamics. Rev. Mod. Phys. 2009, 81, 591–646. [Google Scholar] [CrossRef]
- Gantert, N.; Löwe, M.; Steif, J.E. The voter model with anti-voter bonds. Ann. l’Inst. Henri Poincare B Probab. Stat. 2005, 41, 767–780. [Google Scholar] [CrossRef]
- Lorenz, J. A stabilization theorem for dynamics of continuous opinions. Phys. A Stat. Mech. Appl. 2005, 355, 217–223. [Google Scholar] [CrossRef]
- Toscani, G. Kinetic models of opinion formation. Commun. Math. Sci. 2006, 4, 481–496. [Google Scholar] [CrossRef]
- Brugna, C.; Toscani, G. Kinetic models of opinion formation in the presence of personal conviction. Phys. Rev. E 2015, 92, 052818. [Google Scholar] [CrossRef] [PubMed]
- Pareschi, L.; Vellucci, P.; Zanella, M. Kinetic models of collective decision making in the presence of equality bias. Phys. A Stat. Mech. Appl. 2017, 467, 201–217. [Google Scholar] [CrossRef]
- Albi, G.; Pareschi, L.; Zanella, M. Opinion dynamics over complex networks: Kinetic modeling and numerical methods. Kinet. Relat. Model. 2017, 10, 1–32. [Google Scholar] [CrossRef]
- Castellano, C.; Muñoz, M.A.; Pastor-Satorras, R. Nonlinear q-voter model. Phys. Rev. E 2009, 80, 041129. [Google Scholar] [CrossRef] [PubMed]
- Nyczka, P.; Sznajd-Weron, K. Anticonformity or Independence?—Insights from Statistical Physics. J. Stat. Phys. 2013, 151, 174–202. [Google Scholar] [CrossRef]
- Sznajd-Weron, K.; Szwabiński, J.; Weron, R. Is the Person-Situation Debate Important for Agent-Based Modeling and Vice-Versa? PLoS ONE 2014, 9, e112203. [Google Scholar] [CrossRef] [PubMed]
- Leifeld, P. Polarization of coalitions in an agent-based model of political discourse. Comput. Soc. Netw. 2014, 1, 1–22. [Google Scholar] [CrossRef]
- Abelson, R.P. Mathematical Models of the Distribution of Attitudes Under Controversy. In Contributions to Mathematical Psychology; Frederiksen, N., Gulliksen, H., Eds.; Rinehart Winston: New York, NY, USA, 1964; pp. 142–160. [Google Scholar]
- Marvel, S.A.; Kleinberg, J.; Kleinberg, R.D.; Strogatz, S.H. Continuous-time model of structural balance. Proc. Natl. Acad. Sci. USA 2011, 108, 1771–1776. [Google Scholar] [CrossRef] [PubMed]
- Traag, V.A.; Dooren, P.V.; Leenheer, P.D. Dynamical Models Explaining Social Balance and Evolution of Cooperation. PLoS ONE 2013, 8, e60063. [Google Scholar] [CrossRef] [PubMed]
- Salzarulo, L. A Continuous Opinion Dynamics Model Based on the Principle of Meta-Contrast. J. Artif. Soc. Soc. Simul. 2006, 9, 13. [Google Scholar]
- Shin, J.K.; Lorenz, J. Tipping diffusivity in information accumulation systems: More links, less consensus. J. Stat. Mech. Theory Exp. 2010, 2010, P06005. [Google Scholar] [CrossRef]
- Galam, S. Minority opinion spreading in random geometry. Eur. Phys. J. B 2002, 25, 403–406. [Google Scholar] [CrossRef]
- Mckeown, G.; Sheely, N. Mass Media and Polarisation Processes in the Bounded Confidence Model of Opinion Dynamics. J. Artif. Soc. Soc. Simul. 2006, 9, 11. [Google Scholar]
- Albi, G.; Pareschi, L.; Zanella, M. Boltzmann–type control of opinion consensus through leaders. Philos. Trans. R. Soc. Lond. A 2014, 372, 20140138. [Google Scholar] [CrossRef] [PubMed]
- Düring, B.; Wolfram, M.T. Opinion dynamics: Inhomogeneous Boltzmann–type equations modeling opinion leadership and political segregation. Proc. R. Soc. Lond. A 2015, 471, 20150345. [Google Scholar] [CrossRef]
- Lee, J.K.; Choi, J.; Kim, C.; Kim, Y. Social Media, Network Heterogeneity, and Opinion Polarization. J. Commun. 2014, 64, 702–722. [Google Scholar] [CrossRef]
- Sunstein, C.R. Republic.com; Princeton University Press: Princeton, NJ, USA, 2001. [Google Scholar]
- Van Alstyne, M.; Brynjolfsson, E. Global Village or Cyber-Balkans? Modeling and Measuring the Integration of Electronic Communities. Manag. Sci. 2005, 51, 851–868. [Google Scholar] [CrossRef]
- Bimber, B. The internet and political fragmentation. In Domestic Perspectives on Contemporary Democracy; Nardulli, P.F., Ed.; University of Illinois Press: Champaign, IL, USA, 2008; pp. 155–170. [Google Scholar]
- Papacharissi, Z. The virtual sphere. New Media Soc. 2002, 4, 9–27. [Google Scholar] [CrossRef]
- Festinger, L. A Theory of Cognitive Dissonance; Stanford University Press: Stanford, CA, USA, 1957. [Google Scholar]
- Klapper, J.T. The Effects of Mass Communication; Free Press: New York, NY, USA, 1960. [Google Scholar]
- Delli Carpini, M.; Cook, F.L.; Jacobs, L.R. Public deliberation, discursive participation, and citizen engagement: A review of the empirical literature. Annu. Rev. Political Sci. 2004, 7, 315–344. [Google Scholar] [CrossRef]
- Siedlecki, P.; Szwabiński, J.; Weron, T. The interplay between conformity and anticonformity and its polarizing effect on society. J. Artif. Soc. Soc. Simul. 2016, 19, 9. [Google Scholar] [CrossRef]
- Liu, T.; Bundschuh, R. Quantification of the differences between quenched and annealed averaging for RNA secondary structures. Phys. Rev. E 2005, 72, 061905. [Google Scholar] [CrossRef] [PubMed]
- Myers, D.G. Social Psychology, 11th ed.; Freeman Press: New York, NY, USA, 2013. [Google Scholar]
- Bond, R. Group size and conformity. Group Process. Intergr. Relat. 2005, 8, 331–354. [Google Scholar] [CrossRef]
- Asch, S.E. Opinions and Social Pressure. Sci. Am. 1955, 193, 31–35. [Google Scholar] [CrossRef]
- Conover, M.; Ratkiewicz, J.; Francisco, M.; Gonçalves, B.; Flammini, A.; Menczer, F. Political Polarization on Twitter. In Proceedings of the 5th International AAAI Conference on Weblogs and Social Media, Barcelona, Spain, 17–21 July 2011; pp. 89–96. [Google Scholar]
- Newman, M.E.J. Modularity and community structure in networks. Proc. Natl. Acad. Sci. USA 2006, 103, 8577–8582. [Google Scholar] [CrossRef] [PubMed]
- Zachary, W. An Information Flow Model for Conflict and Fission in Small Groups. J. Anthropol. Res. 1977, 33, 452–473. [Google Scholar] [CrossRef]
- Sood, V.; Antal, T.; Redner, S. Voter models on heterogeneous networks. Phys. Rev. E 2008, 77, 041121. [Google Scholar] [CrossRef] [PubMed]
- Willis, R.H. Two dimensions of conformity-nonconformity. Sociometry 1963, 1963, 499–513. [Google Scholar] [CrossRef]
- Nail, P.R. Toward an integration of some models and theories of social response. Psychol. Bull. 1986, 100, 190–206. [Google Scholar] [CrossRef]
- Nail, P.R.; MacDonald, G.; Levy, D.A. Proposal of a Four Dimensional Model of Social Response. Psychol. Bull. 2000, 126, 454–470. [Google Scholar] [CrossRef] [PubMed]
- Nail, P.R.; Domenico, S.I.; MacDonald, G. Proposal of a Double Diamond Model of Social Response. Rev. Gen. Psychol. 2013, 17, 1–19. [Google Scholar] [CrossRef]
- Galam, S. Contrarian deterministic effects on opinion dynamics: The hung elections scenario. Phys. A Stat. Mech. Appl. 2004, 333, 453–460. [Google Scholar] [CrossRef]
- Krizan, Z.; Baron, R.S. Group polarization and choice-dilemmas: How important is self-categorization? Eur. J. Soc. Psychol. 2007, 37, 191–201. [Google Scholar] [CrossRef]
- Lewenstein, M.; Nowak, A.; Latané, B. Statistical mechanics of social impact. Phys. Rev. A 1992, 45, 763–776. [Google Scholar] [CrossRef] [PubMed]
- Stouffer, S.; Guttman, L.; Suchman, E.A.; Lazarsfeld, P.; Star, S.; Clausen, J. Studies in Social Psychology in World War II; Princeton University Press: Princeton, NJ, USA, 1950. [Google Scholar]
- Guerra, P.H.C.; Meira, W., Jr.; Cardie, C.; Kleinberg, R. A Measure of Polarization on Social Media Networks Based on Community Boundaries. In Proceedings of the 7th International AAAI Conference on Web and Social Media, Cambridge, MA, USA, 8–11 July 2013; pp. 215–224. [Google Scholar]
- Watts, D.J.; Dodds, P.S. Influentials, Networks, and Public Opinion Formation. J. Consum. Res. 2007, 34, 441–458. [Google Scholar] [CrossRef]
- Przybyła, P.; Sznajd-Weron, K.; Weron, R. Diffusion of innovation within an agent-based model: Spinsons, independence and advertising. Adv. Complex Syst. 2014, 17, 1450004. [Google Scholar] [CrossRef]
- Martín, P.V.; Bonachela, J.; Munoz, M.M. Quenched disorder forbids discontinuous transitions in nonequilibrium low-dimensional systems. Phys. Rev. E 2014, 89, 012145. [Google Scholar] [CrossRef] [PubMed]
- Malmi-Kakkada, A.N.; Valls, O.T.; Dasgupta, C. Ising model on a random network with annealed or quenched disorder. Phys. Rev. B 2014, 90, 024202. [Google Scholar] [CrossRef]
- Apriasz, R.; Krueger, T.; Marcjasz, G.; Sznajd-Weron, K. The hunt opinion model—An agent based approach to recurring fashion cycles. PLoS ONE 2016, 11, e0166323. [Google Scholar] [CrossRef] [PubMed]
- Knebel, J.; Weber, M.F.; Krüger, T.; Frey, E. Evolutionary games of condensates in coupled birth–death processes. Nat. Commun. 2015, 6. [Google Scholar] [CrossRef] [PubMed]
- Jones, E.; Oliphant, T.; Peterson, P. SciPy: Open Source Scientific Tools for Python. Available online: http://www.scipy.org/ (accessed 18 July 2017).
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; Addison-Wesley: Reading, MA, USA, 1994. [Google Scholar]
- Wise, K.; Alhabash, S.; Park, H. Emotional Responses during Social Information Seeking on Facebook. Cyberpsychol. Behav. Soc. Netw. 2010, 13, 555–562. [Google Scholar] [CrossRef] [PubMed]
- Bozdag, E. Bias in algorithmic filtering and personalization. Ethics Inf. Technol. 2013, 15, 209–227. [Google Scholar] [CrossRef]
- Klemm, K.; Eguíluz, V.M.; Toral, R.; Miguel, M.S. Nonequilibrium transitions in complex networks: A model of social interaction. Phys. Rev. E 2003, 67, 026120. [Google Scholar] [CrossRef] [PubMed]
- Krueger, T.; Szwabiński, J.; Weron, T. Conformity, anticonformity and polarization of opinions: Insights from a mathematical model of opinion dynamics. arXiv. 2016. Available online: https://doi.org/10.5281/zenodo.167817 (accessed on 18 July 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| q | 3 | 4 | 5 | 6 |
|---|---|---|---|---|
| 0.267 | 0.311 | 0.339 | 0.359 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krueger, T.; Szwabiński, J.; Weron, T. Conformity, Anticonformity and Polarization of Opinions: Insights from a Mathematical Model of Opinion Dynamics. Entropy 2017, 19, 371. https://doi.org/10.3390/e19070371
Krueger T, Szwabiński J, Weron T. Conformity, Anticonformity and Polarization of Opinions: Insights from a Mathematical Model of Opinion Dynamics. Entropy. 2017; 19(7):371. https://doi.org/10.3390/e19070371
Chicago/Turabian StyleKrueger, Tyll, Janusz Szwabiński, and Tomasz Weron. 2017. "Conformity, Anticonformity and Polarization of Opinions: Insights from a Mathematical Model of Opinion Dynamics" Entropy 19, no. 7: 371. https://doi.org/10.3390/e19070371
APA StyleKrueger, T., Szwabiński, J., & Weron, T. (2017). Conformity, Anticonformity and Polarization of Opinions: Insights from a Mathematical Model of Opinion Dynamics. Entropy, 19(7), 371. https://doi.org/10.3390/e19070371