Figure 1.
The flow chart of complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN).
Figure 1.
The flow chart of complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN).
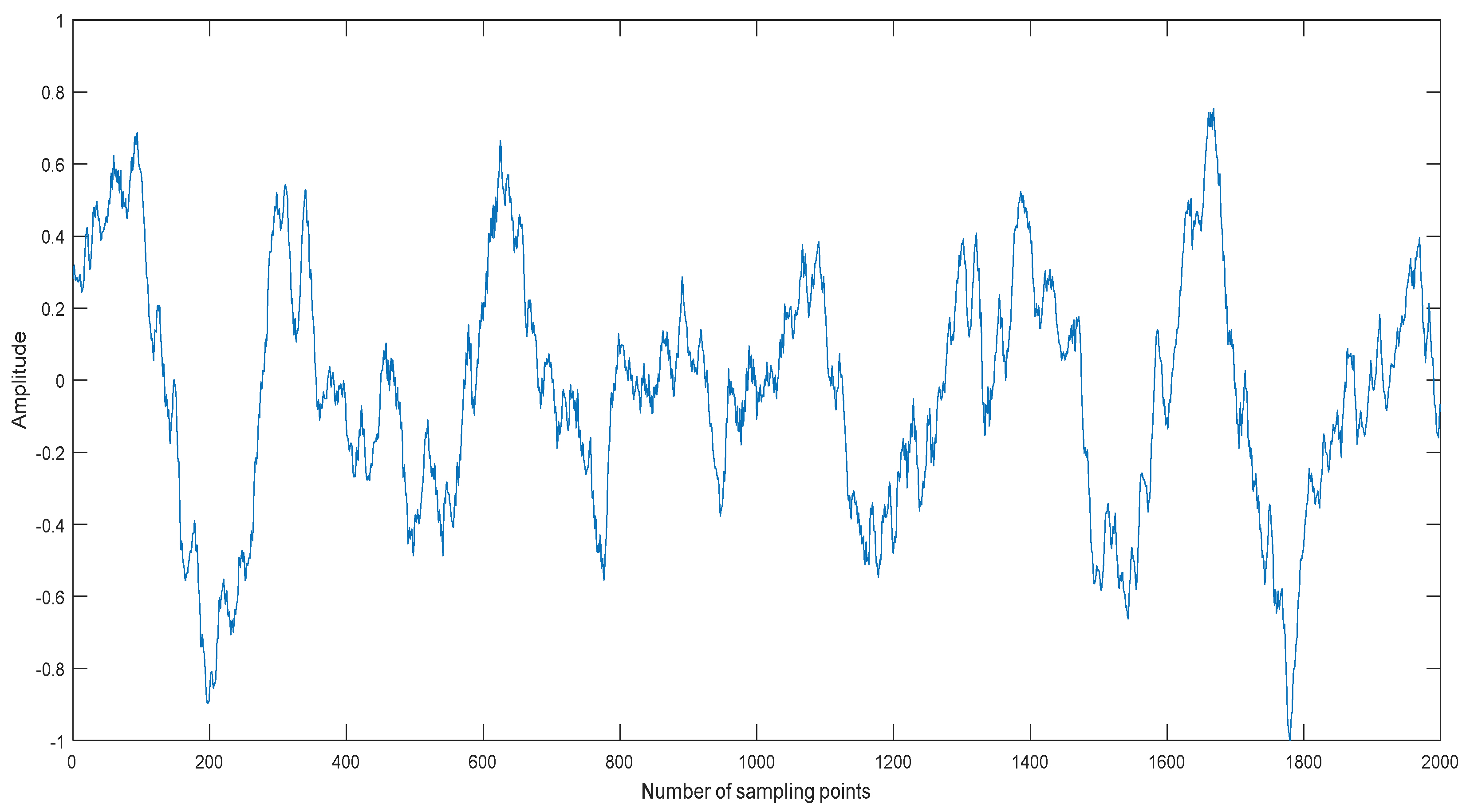
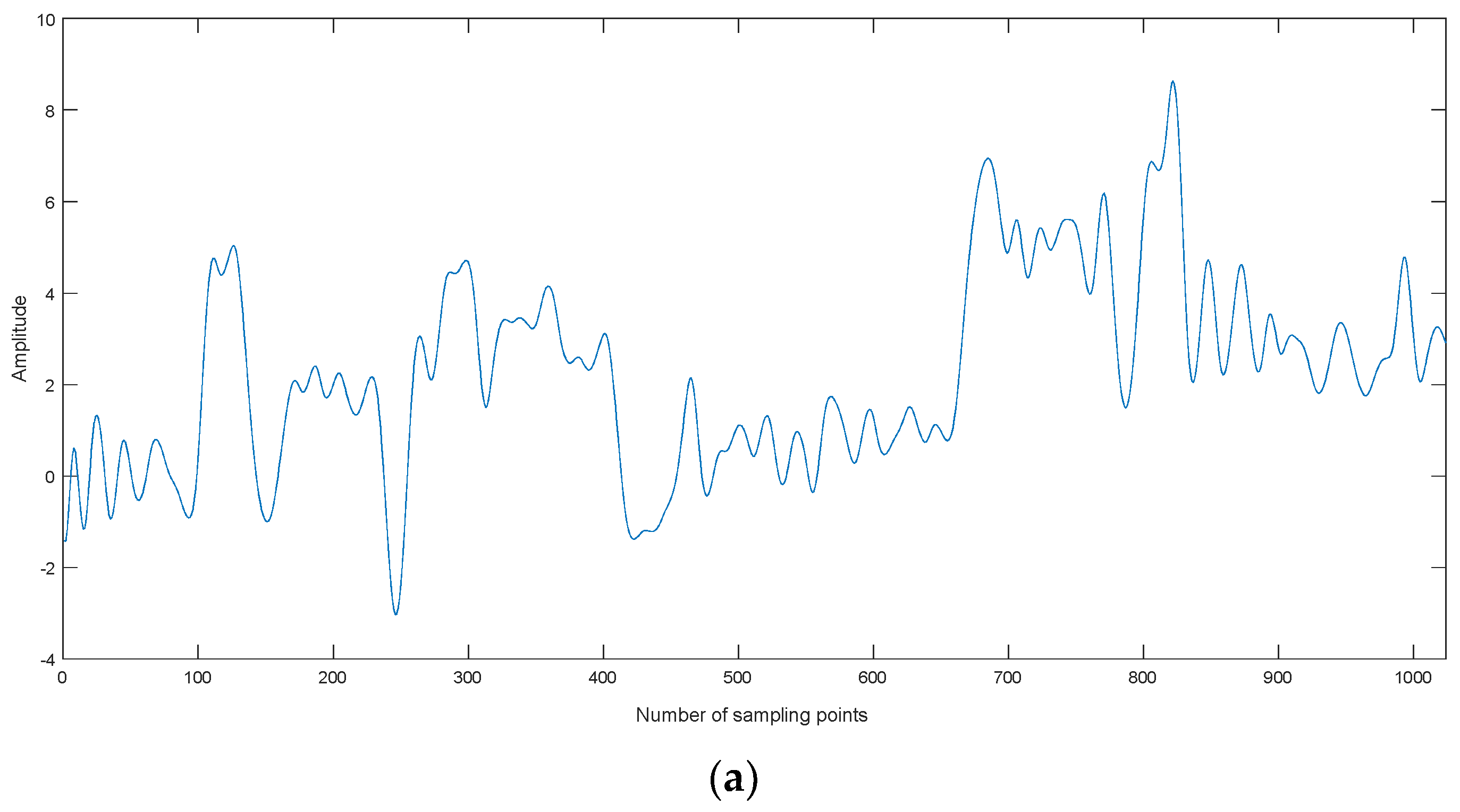
Figure 2.
The normalized ship signal.
Figure 2.
The normalized ship signal.
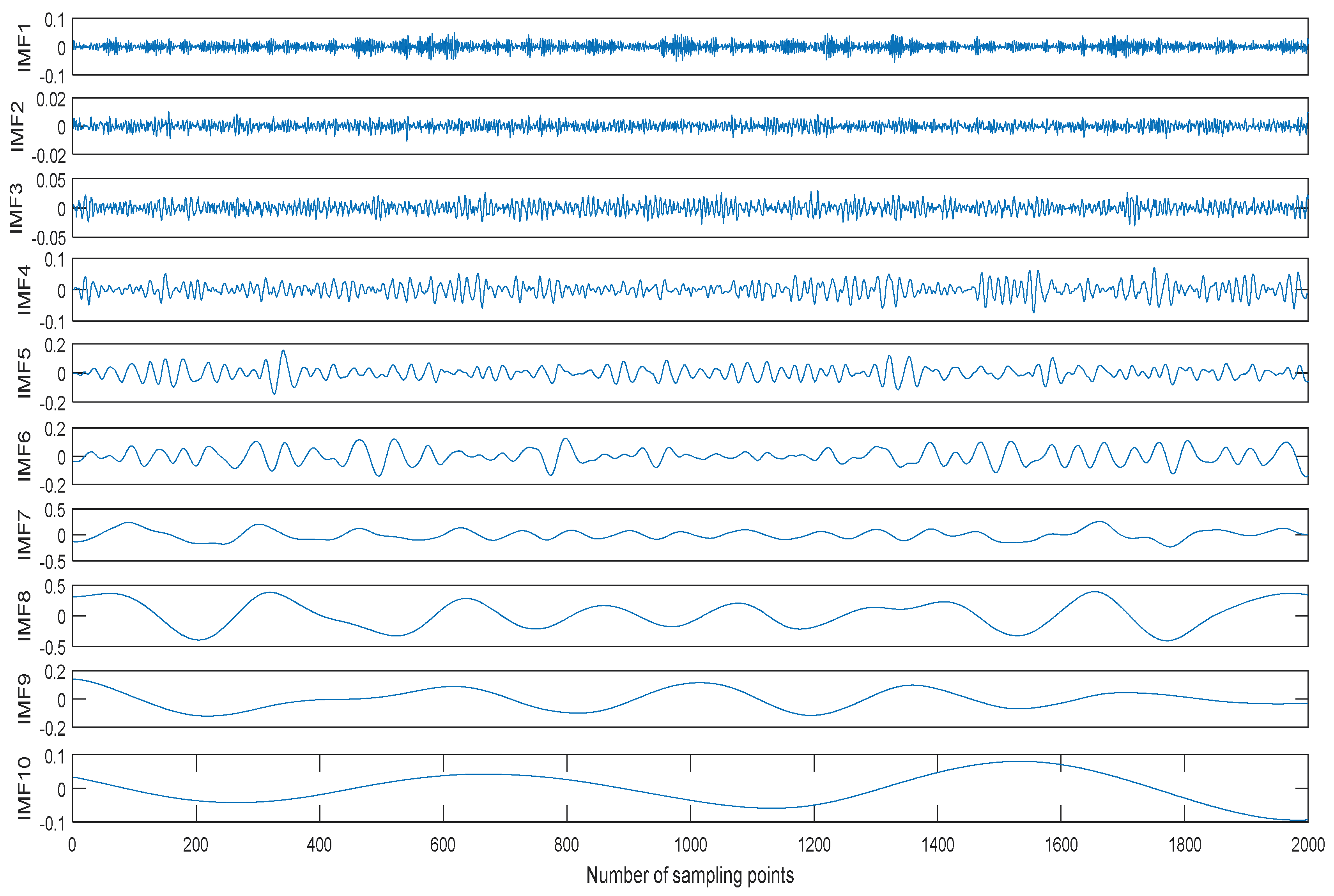
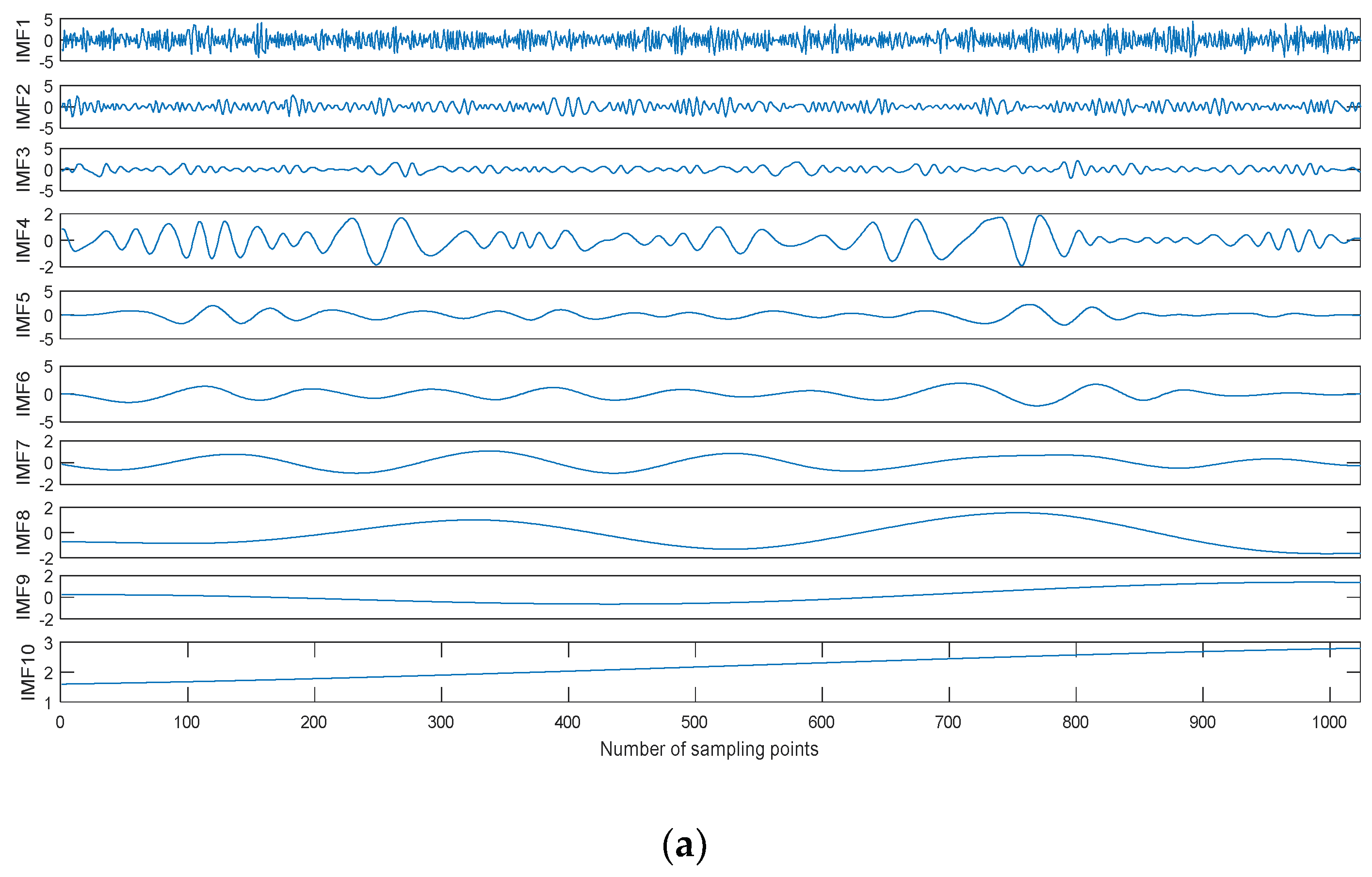
Figure 3.
The decomposition result of the ship signal by CEEMDAN.
Figure 3.
The decomposition result of the ship signal by CEEMDAN.
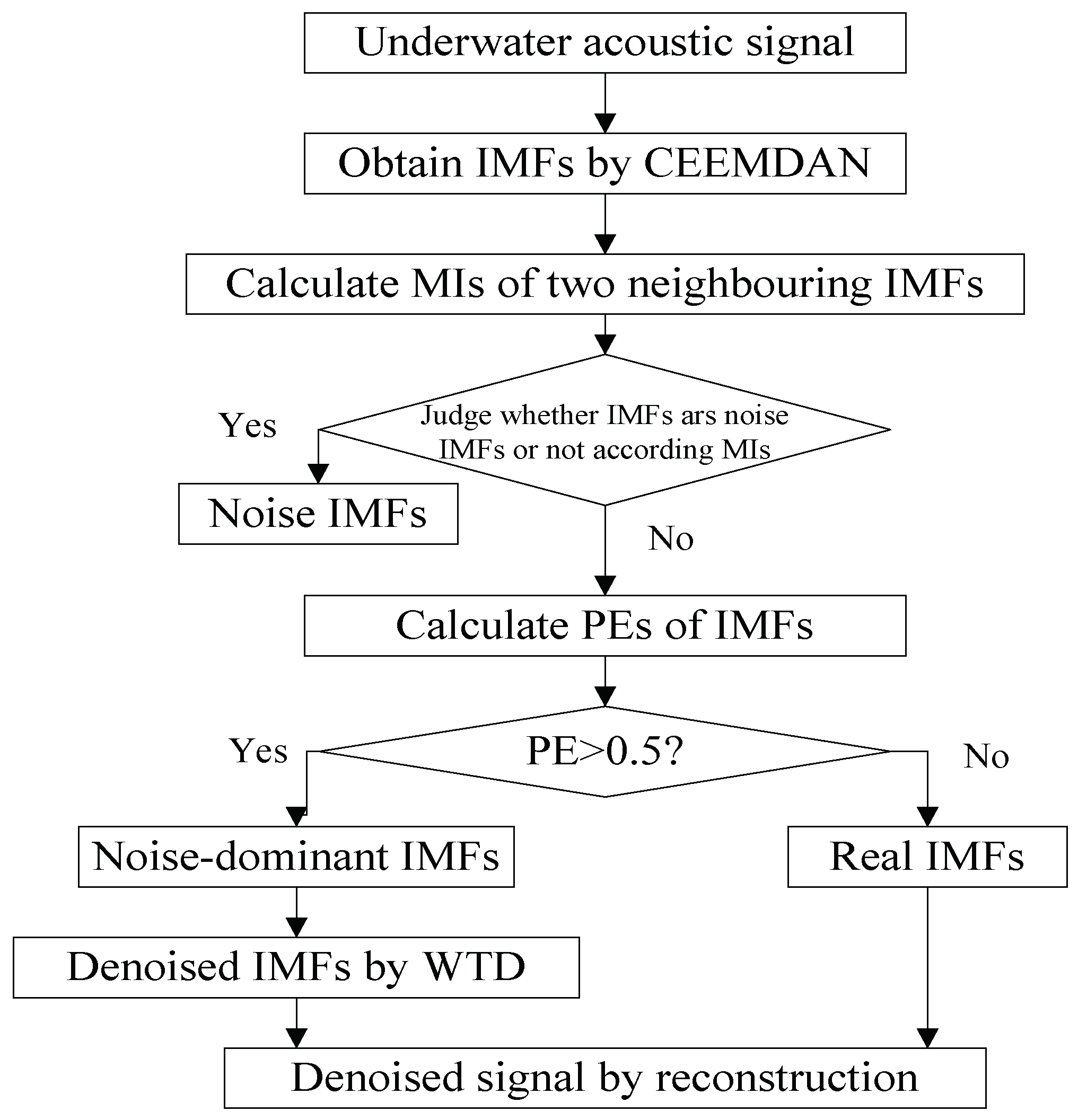
Figure 4.
The flow chart of the proposed denoising algorithm for underwater acoustic signal.
Figure 4.
The flow chart of the proposed denoising algorithm for underwater acoustic signal.
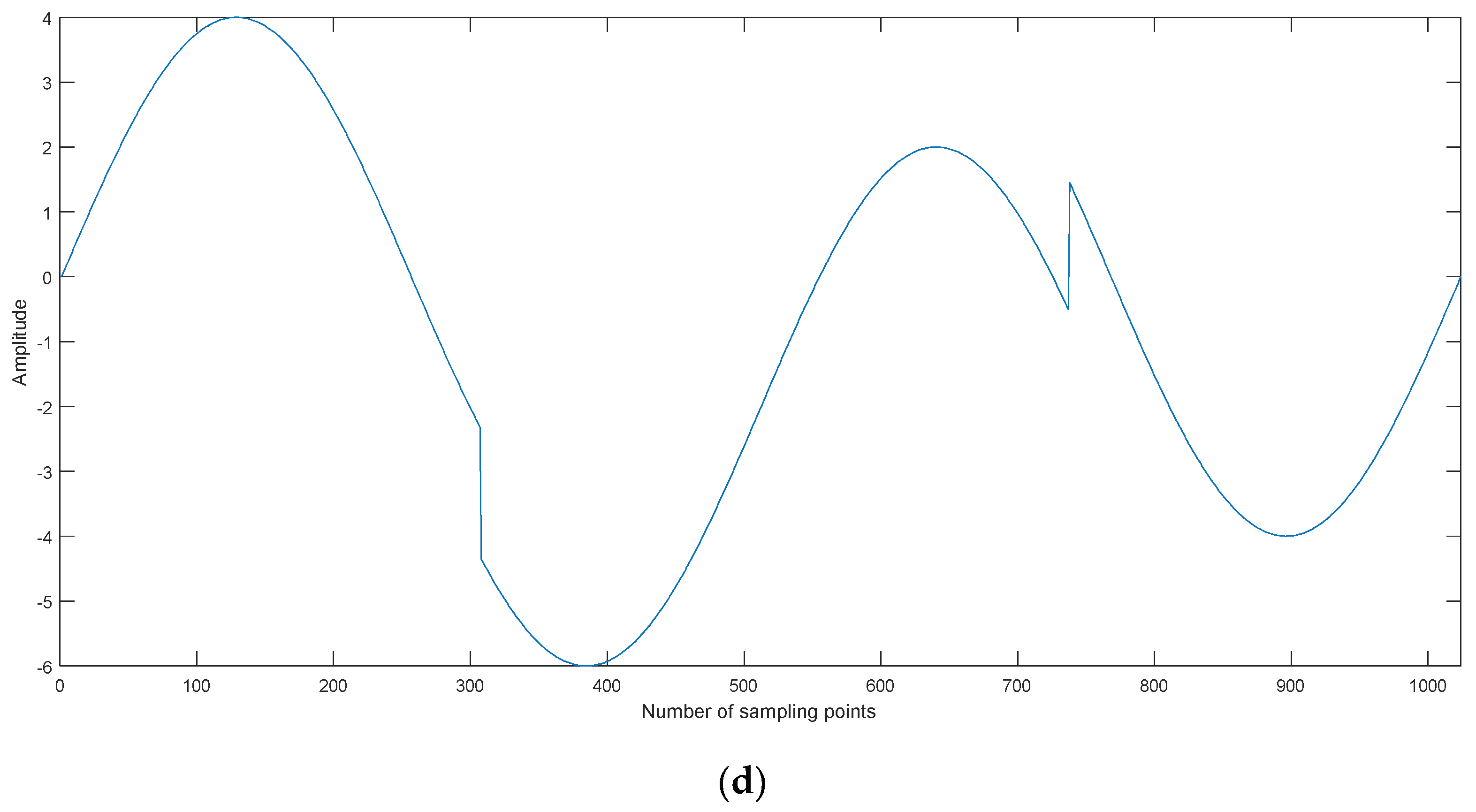
Figure 5.
The time-domain waveforms for simulation signals. (a) Blocks, (b) Bumps, (c) Doppler, and (d) Heavysine.
Figure 5.
The time-domain waveforms for simulation signals. (a) Blocks, (b) Bumps, (c) Doppler, and (d) Heavysine.
Figure 6.
The time-domain waveform of the noisy Blocks signal with 0 dB.
Figure 6.
The time-domain waveform of the noisy Blocks signal with 0 dB.
Figure 7.
The decomposition result of the noisy Blocks signal with 0 dB. (a) Empirical mode decomposition (EMD), (b) Ensemble EMD (EEMD), and (c) CEEMDAN.
Figure 7.
The decomposition result of the noisy Blocks signal with 0 dB. (a) Empirical mode decomposition (EMD), (b) Ensemble EMD (EEMD), and (c) CEEMDAN.
Figure 8.
The six kinds of reconstructed signals by different decomposition methods. (a) EMD, (b) EEMD, and (c) CEEMDAN.
Figure 8.
The six kinds of reconstructed signals by different decomposition methods. (a) EMD, (b) EEMD, and (c) CEEMDAN.
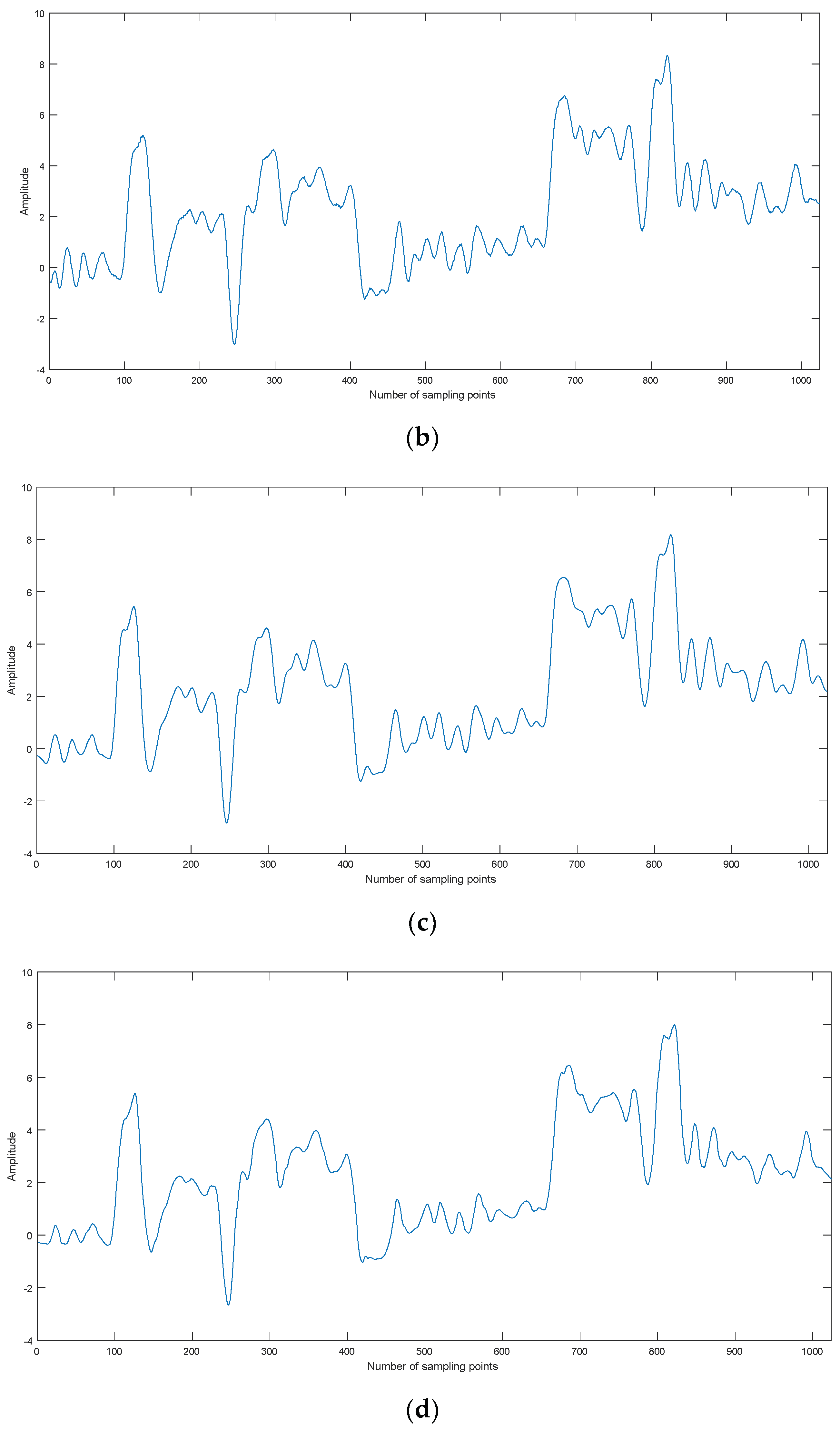
Figure 9.
The denoising results for different methods. (a) EMD-MI, (b) EEMD-MI, (c) CEEMDAN-MI, and (d) CEEMDAN-MI-PE.
Figure 9.
The denoising results for different methods. (a) EMD-MI, (b) EEMD-MI, (c) CEEMDAN-MI, and (d) CEEMDAN-MI-PE.
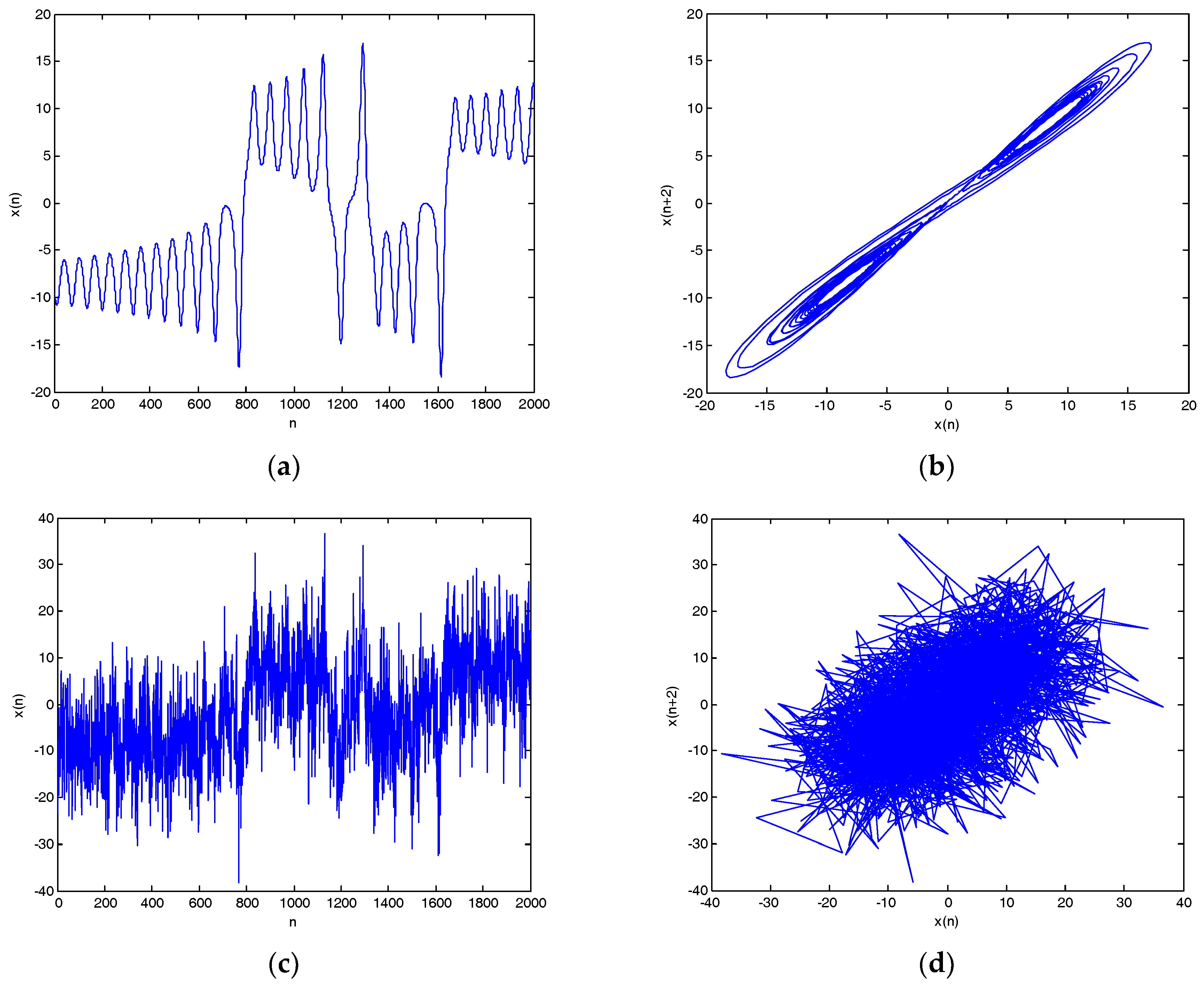
Figure 10.
Lorenz noisy and denoised signals with different SNRs and their attractor trajectories. (a) Lorenz signal, (b) Lorenz attractor trajectory, (c) Lorenz noisy signal with 0 dB, (d) Noisy attractor trajectory with 0 dB, (e) Lorenz noisy signal with 10 dB, (f) noisy attractor trajectory with 10 dB, (g) denoised Lorenz signal with 0 dB, (h) denoised attractor trajectory (0 dB), (i) denoised Lorenz signal with 10 dB, and(j) denoised attractor trajectory (10 dB).
Figure 10.
Lorenz noisy and denoised signals with different SNRs and their attractor trajectories. (a) Lorenz signal, (b) Lorenz attractor trajectory, (c) Lorenz noisy signal with 0 dB, (d) Noisy attractor trajectory with 0 dB, (e) Lorenz noisy signal with 10 dB, (f) noisy attractor trajectory with 10 dB, (g) denoised Lorenz signal with 0 dB, (h) denoised attractor trajectory (0 dB), (i) denoised Lorenz signal with 10 dB, and(j) denoised attractor trajectory (10 dB).
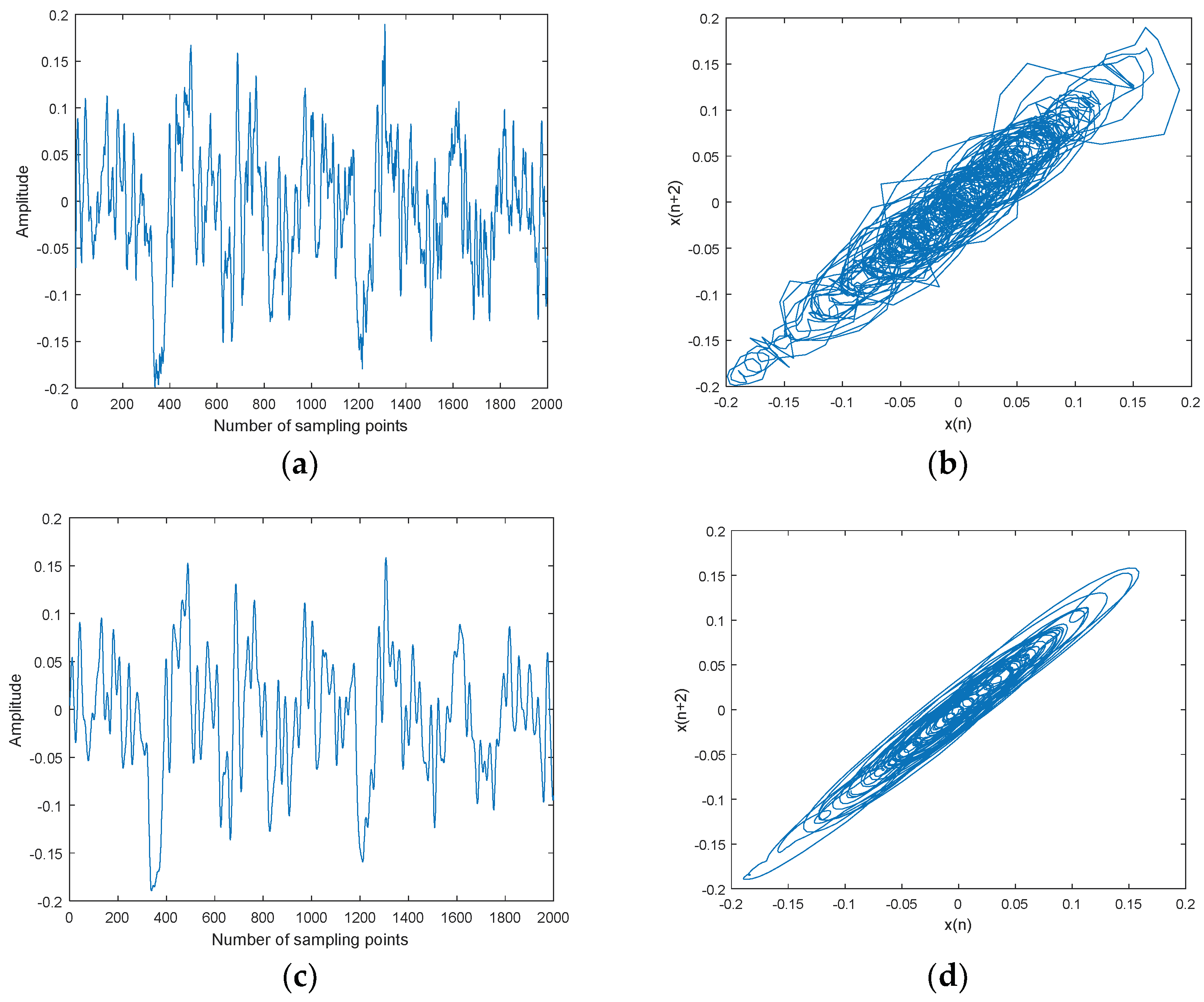
Figure 11.
Ship-1 and denoised Ship-1 signals and their attractor trajectories. (a) Ship-1, (b) attractor trajectory for ship-1, (c) denoised Ship-1, and (d) attractor trajectory for denoised ship-1.
Figure 11.
Ship-1 and denoised Ship-1 signals and their attractor trajectories. (a) Ship-1, (b) attractor trajectory for ship-1, (c) denoised Ship-1, and (d) attractor trajectory for denoised ship-1.
Figure 12.
Ship-2 and denoised Ship-2 signals and their attractor trajectories. (a) Ship-2, (b) attractor trajectory for ship-2, (c) denoised Ship-2, (d) attractor trajectory for denoised ship-2.
Figure 12.
Ship-2 and denoised Ship-2 signals and their attractor trajectories. (a) Ship-2, (b) attractor trajectory for ship-2, (c) denoised Ship-2, (d) attractor trajectory for denoised ship-2.
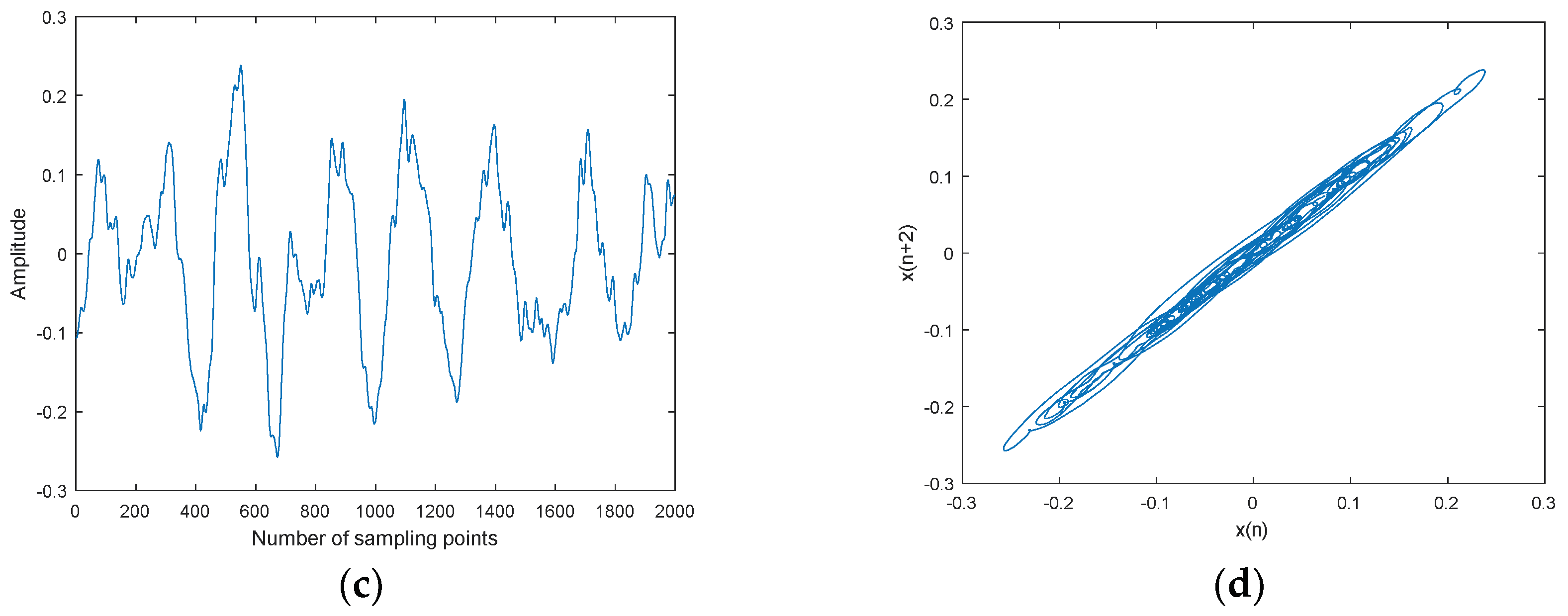
Figure 13.
Ship-3 and denoised Ship-3 signals and their attractor trajectories. (a) Ship-3, (b) attractor trajectory for ship-3, (c) denoised Ship-3, (d) attractor trajectory for denoised ship-3.
Figure 13.
Ship-3 and denoised Ship-3 signals and their attractor trajectories. (a) Ship-3, (b) attractor trajectory for ship-3, (c) denoised Ship-3, (d) attractor trajectory for denoised ship-3.
Table 1.
The center frequency distribution of intrinsic mode functions (IMFs).
Table 1.
The center frequency distribution of intrinsic mode functions (IMFs).
| IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 |
|---|
| 12333 | 9068.1 | 6296.3 | 3065.5 | 1595.4 | 902.08 | 446.55 | 340.21 | 127.43 | 67.039 |
Table 2.
The mutual informations (MIs) of two neighboring IMFs.
Table 2.
The mutual informations (MIs) of two neighboring IMFs.
| MI1 | MI2 | MI3 | MI4 | MI5 | MI6 | MI7 | MI8 | MI9 |
|---|
| 0.0676 | 0.0501 | 0.0511 | 0.1279 | 0.1751 | 0.3437 | 0.8394 | 0.9998 | 1.6231 |
Table 3.
MIs of two neighboring IMFs by different decomposition methods.
Table 3.
MIs of two neighboring IMFs by different decomposition methods.
| Methods | | | | | | | | | |
|---|
| EMD | 0.0034 | 0.0113 | 0.0633 | 0.1805 | 0.4233 | 0.6419 | 1.332 | 2.1514 | 3.0829 |
| EEMD | 0.0014 | 0.0023 | 0.0475 | 0.1969 | 0.5045 | 0.8873 | 1.8319 | 1.5387 | 3.0034 |
| CEEMDAN | 0.0143 | 0.0419 | 0.0647 | 0.0803 | 0.2169 | 0.5376 | 0.8044 | 1.5476 | 2.3663 |
Table 4.
PEs of non-noise IMFs.
Table 4.
PEs of non-noise IMFs.
| IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 |
|---|
| 0.5869 | 0.4945 | 0.4547 | 0.4263 | 0.4038 | 0.3767 |
Table 5.
Comparison of the parameters of different denoising methods.
Table 5.
Comparison of the parameters of different denoising methods.
| Parameter | EMD-MI | EEMD-MI | CEEMDAN-MI | CEEMDAN-MI-PE |
|---|
| SNR/dB | 7.1052 | 8.6122 | 9.0433 | 9.3663 |
| RMSE | 0.8031 | 0.7496 | 0.7189 | 0.7078 |
Table 6.
(a) wavelet soft-threshold denoising (WSTD) results for Blocks signal. (b) WSTD results for Bumps signal. (c) WSTD results for Doppler signal. (d) WSTD results for Heavysine signal.
Table 6.
(a) wavelet soft-threshold denoising (WSTD) results for Blocks signal. (b) WSTD results for Bumps signal. (c) WSTD results for Doppler signal. (d) WSTD results for Heavysine signal.
| SNR | Parameter | Decomposition Level |
|---|
| 1 | 2 | 3 | 4 | 5 | 6 |
|---|
| (a) |
| −10 dB | SNR/db | −7.2271 | −4.8104 | −2.3898 | 0.2149 | 1.6290 | 1.0946 |
| RMSE | 3.6839 | 3.5798 | 3.5307 | 3.5614 | 3.3392 | 3.4362 |
| −5 dB | SNR/db | −2.3435 | 0.3025 | 3.1728 | 5.7484 | 6.3767 | 3.8336 |
| RMSE | 1.4457 | 1.5207 | 1.4748 | 1.6308 | 1.5565 | 1.2164 |
| 0 dB | SNR/db | 3.2235 | 6.2477 | 8.1067 | 8.4866 | 7.7998 | 5.8663 |
| RMSE | 0.8504 | 0.7895 | 0.8176 | 0.8341 | 0.7473 | 0.6417 |
| 5 dB | SNR/db | 7.6526 | 10.1584 | 11.4382 | 10.2663 | 9.6887 | 8.4297 |
| RMSE | 0.3915 | 0.4133 | 0.4045 | 0.4114 | 0.4347 | 0.4945 |
| (b) |
| −10 dB | SNR/db | −7.4756 | −4.5317 | −2.0528 | 0.3106 | 0.8154 | 0.5481 |
| RMSE | 1.6983 | 1.6584 | 1.7329 | 1.6642 | 1.3528 | 1.5681 |
| −5 dB | SNR/db | −3.2325 | −0.1944 | 2.3835 | 4.5283 | 4.3014 | 3.5033 |
| RMSE | 1.5826 | 1.5639 | 1.5729 | 1.4888 | 1.5554 | 1.9642 |
| 0 dB | SNR/db | 2.6556 | 5.1528 | 7.8573 | 8.3710 | 6.9682 | 6.3942 |
| RMSE | 0.3337 | 0.3153 | 0.3046 | 0.2942 | 0.3022 | 0.3025 |
| 5 dB | SNR/db | 7.4436 | 10.3617 | 11.2783 | 10.7887 | 9.1181 | 9.2302 |
| RMSE | 0.2211 | 0.2385 | 0.2360 | 0.2486 | 0.2182 | 0.2427 |
| (c) |
| −10 dB | SNR/db | −6.6660 | −4.3199 | −0.7130 | 1.4574 | 3.4092 | 3.2951 |
| RMSE | 0.9655 | 0.9220 | 0.9301 | 0.8570 | 0.9781 | 1.2149 |
| −5 dB | SNR/db | −1.8736 | 0.9657 | 4.1477 | 6.8774 | 7.0568 | 6.4521 |
| RMSE | 0.0502 | 0.0538 | 0.0511 | 0.0491 | 0.0342 | 0.0254 |
| 0 dB | SNR/db | 2.4724 | 4.5147 | 8.0985 | 8.8992 | 9.1371 | 8.8475 |
| RMSE | 0.0694 | 0.0756 | 0.0545 | 0.0445 | 0.0272 | 0.0284 |
| 5 dB | SNR/db | 8.1516 | 10.7101 | 11.0123 | 11.2306 | 11.5458 | 10.0998 |
| RMSE | 0.0324 | 0.0333 | 0.0338 | 0.0343 | 0.0285 | 0.0127 |
| (d) |
| −10 dB | SNR/db | −6.1624 | −3.3838 | −0.9295 | 1.7670 | 5.8097 | 4.1349 |
| RMSE | 2.8465 | 2.6462 | 2.5926 | 2.4760 | 2.6292 | 4.2984 |
| −5 dB | SNR/db | −2.3572 | 0.2426 | 3.1175 | 6.0666 | 7.3376 | 6.857 |
| RMSE | 0.8090 | 0.8554 | 0.8105 | 0.7434 | 0.7203 | 0.7268 |
| 0 dB | SNR/db | 2.9317 | 5.4369 | 8.9585 | 11.8276 | 14.4169 | 13.8013 |
| RMSE | 0.2792 | 0.1840 | 0.1973 | 0.1924 | 0.1682 | 0.3920 |
| 5 dB | SNR/db | 8.1963 | 10.8592 | 13.4744 | 15.5710 | 17.9746 | 17.6310 |
| RMSE | 0.2759 | 0.2346 | 0.2099 | 0.2277 | 0.1028 | 0.1503 |
Table 7.
(a) Denoising results of different methods for Blocks signal. (b) Denoising results of different methods for Bumps signal. (c) Denoising results of different methods for Doppler signal. (d) Denoising results of different methods for Heavysine signal.
Table 7.
(a) Denoising results of different methods for Blocks signal. (b) Denoising results of different methods for Bumps signal. (c) Denoising results of different methods for Doppler signal. (d) Denoising results of different methods for Heavysine signal.
| SNR | Parameter | Denoising Method |
|---|
| EMD-MI | EEMD-MI | CEEMDAN-MI | CEEMDAN-MI-PE | WSTD |
|---|
| (a) |
| −10 dB | SNR/db | 1.8632 | 2.0988 | 2.2803 | 2.5588 | 1.6290 |
| RMSE | 5.0621 | 3.3228 | 2.5753 | 2.4237 | 3.3392 |
| −5 dB | SNR/db | 4.8004 | 6.4972 | 6.6097 | 6.8239 | 6.3767 |
| RMSE | 1.6806 | 1.4843 | 1.3438 | 1.3401 | 1.5565 |
| 0 dB | SNR/db | 6.2426 | 8.4579 | 9.2502 | 9.8326 | 7.7998 |
| RMSE | 0.8261 | 0.7834 | 0.7651 | 0.7051 | 0.7473 |
| 5 dB | SNR/db | 11.3699 | 11.5903 | 11.7158 | 11.8733 | 11.4382 |
| RMSE | 0.6600 | 0.3917 | 0.4086 | 0.3489 | 0.4045 |
| (b) |
| −10 dB | SNR/db | −0.1258 | 0.4728 | 0.9903 | 1.2130 | 0.8154 |
| RMSE | 1.7652 | 1.4865 | 1.0045 | 1.0041 | 1.3528 |
| −5 dB | SNR/db | 3.4745 | 4.4220 | 4.6204 | 4.7355 | 4.5283 |
| RMSE | 1.8357 | 1.5325 | 1.5554 | 1.4859 | 1.5888 |
| 0 dB | SNR/db | 6.8187 | 7.7571 | 8.7208 | 9.0641 | 8.3710 |
| RMSE | 0.4253 | 0.3461 | 0.1969 | 0.1950 | 0.2942 |
| 5 dB | SNR/db | 9.5890 | 10.5161 | 11.4614 | 11.5623 | 11.2783 |
| RMSE | 0.3158 | 0.2058 | 0.1609 | 0.1513 | 0.2360 |
| (c) |
| −10 dB | SNR/db | 3.0361 | 3.3580 | 3.5508 | 4.1789 | 3.4092 |
| RMSE | 1.2158 | 0.5124 | 0.4747 | 0.4597 | 0.9781 |
| −5 dB | SNR/db | 5.7752 | 6.3432 | 7.2250 | 7.2939 | 7.0568 |
| RMSE | 0.0604 | 0.0463 | 0.0263 | 0.0213 | 0.0342 |
| 0 dB | SNR/db | 8.3418 | 8.6526 | 8.8555 | 9.5866 | 9.1371 |
| RMSE | 0.0235 | 0.0190 | 0.0182 | 0.0165 | 0.0272 |
| 5 dB | SNR/db | 11.2457 | 11.7545 | 11.8473 | 12.1583 | 11.5458 |
| RMSE | 0.0298 | 0.0025 | 0.0015 | 0.0013 | 0.0285 |
| (d) |
| −10 dB | SNR/db | 6.0781 | 6.236 | 6.4919 | 6.6696 | 5.8097 |
| RMSE | 1.8252 | 1.6397 | 1.5395 | 1.4666 | 2.6292 |
| −5 dB | SNR/db | 7.1830 | 8.1239 | 8.2463 | 8.3975 | 7.3376 |
| RMSE | 0.7325 | 0.6431 | 0.6324 | 0.6216 | 0.7203 |
| 0 dB | SNR/db | 14.896 | 15.128 | 15.2882 | 15.4476 | 14.4169 |
| RMSE | 0.1224 | 0.1158 | 0.1142 | 0.1139 | 0.1682 |
| 5 dB | SNR/db | 17.8843 | 19.5125 | 19.7096 | 19.7125 | 17.9746 |
| RMSE | 0.1052 | 0.0931 | 0.0925 | 0.0921 | 0.1028 |
Table 8.
Denoising results of different signal-to-noise ratio (SNR).
Table 8.
Denoising results of different signal-to-noise ratio (SNR).
| SNR | Parameter | CEEMDAN-MI-PE |
|---|
| 0 dB | SNR/db | 13.254 |
| RMSE | 1.8762 |
| 10 dB | SNR/db | 20.146 |
| RMSE | 0.3993 |
Table 9.
Denoising results of different ships by CEEMDAN-MI-PE.
Table 9.
Denoising results of different ships by CEEMDAN-MI-PE.
| Parameter | Ship-1 | Ship-2 | Ship-3 |
|---|
| Before denoising | PE | 0.8094 | 0.9231 | 0.8856 |
| NPE | 0.1227 | 0.0495 | 0.0739 |
| After denoising | PE | 0.5537 | 0.5381 | 0.5148 |
| NPE | 0.2680 | 0.2765 | 0.2861 |






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}