Investigating Information Geometry in Classical and Quantum Systems through Information Length


Abstract
:1. Introduction
2. Information Length
3. Attractor Structure
3.1. Linear vs. Cubic Forces
3.2. Chaotic Attractor
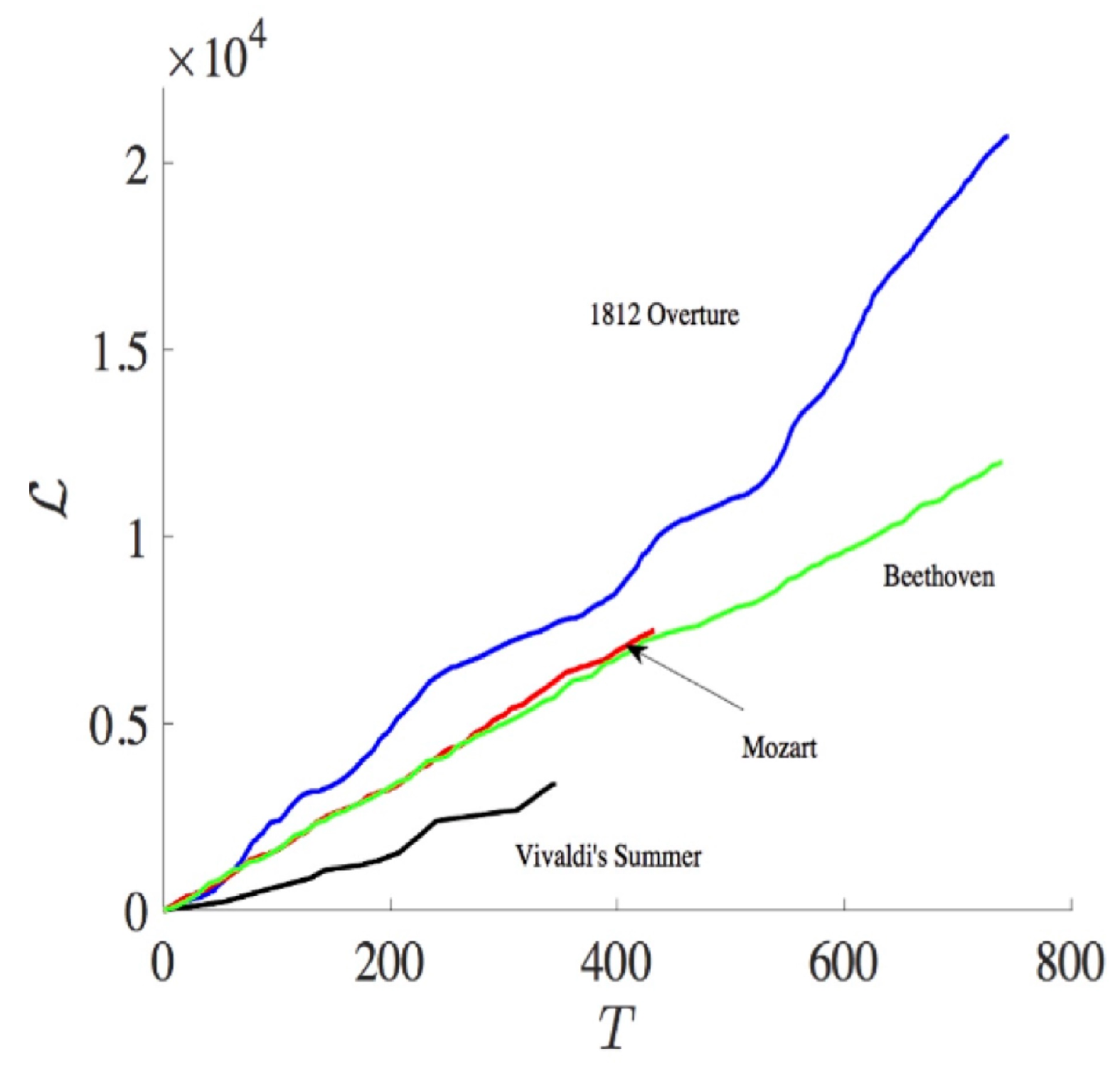
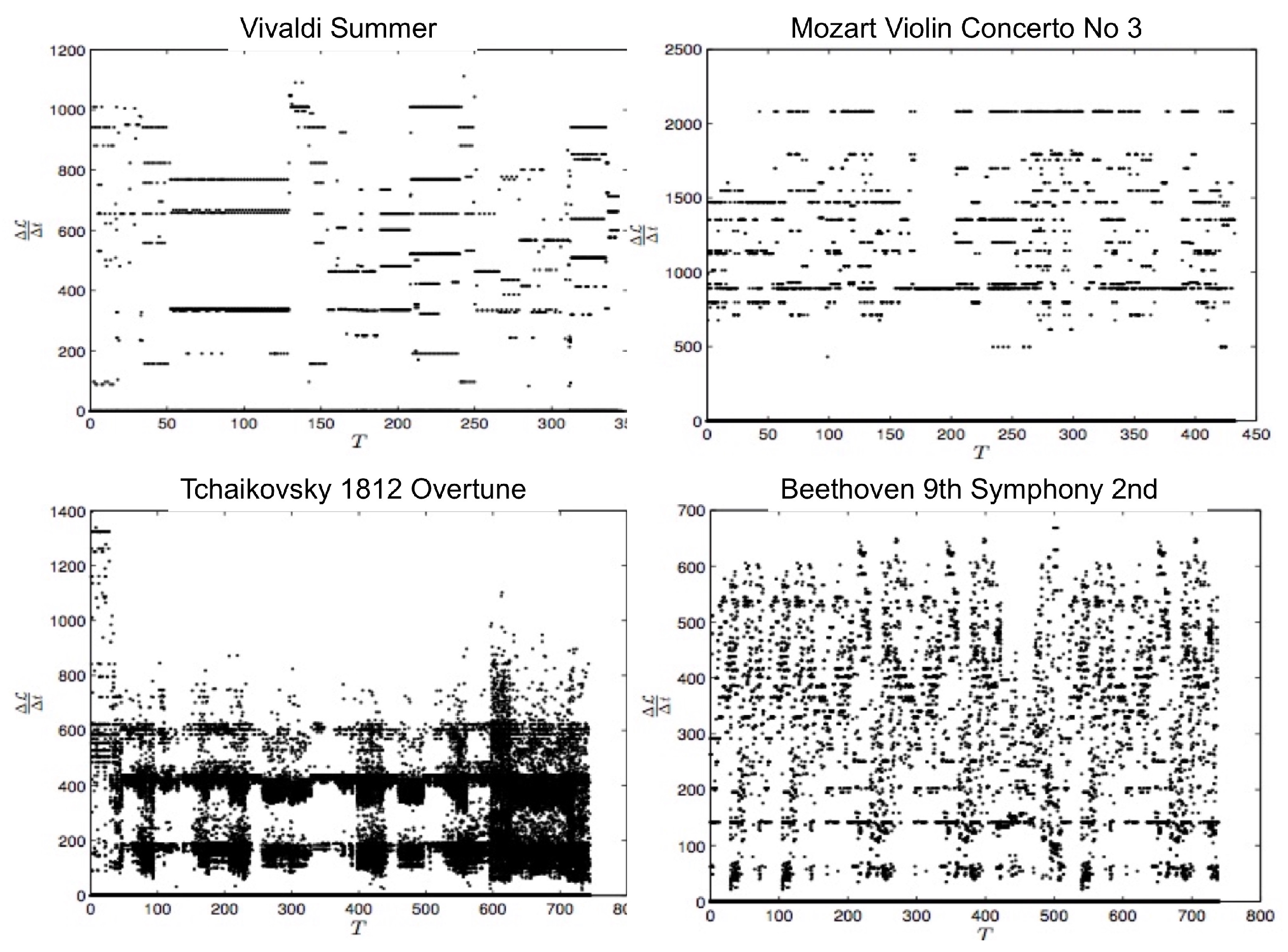
4. Music: Can We See the Music?
5. Quantum Systems
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. for the O-U Process
References
- Gibbs, A.L.; Su, F.E. On choosing and bounding probability metrics. Int. Stat. Rev. 2002, 70, 419–435. [Google Scholar] [CrossRef]
- Wootters, W.K. Statistical distance and Hilbert space. Phys. Rev. D 1981, 23, 357. [Google Scholar] [CrossRef]
- Frieden, B.R. Science from Fisher Information; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Braunstein, S.L.; Caves, C.M. Statistical distance and the geometry of quantum states. Phys. Rev. Lett. 1994, 72, 3439. [Google Scholar] [CrossRef] [PubMed]
- Feng, E.H.; Crooks, G.E. Far-from-equilibrium measurements of thermodynamic length. Phys. Rev. E 2009, 79, 012104. [Google Scholar] [CrossRef] [PubMed]
- Ruppeiner, G. Thermodynamics: A Riemannian geometric model. Phys. Rev. A 1979, 20, 1608–1613. [Google Scholar] [CrossRef]
- Schlögl, F. Thermodynamic metric and stochastic measures. Z. Phys. B Condens. Matter 1985, 59, 449–454. [Google Scholar] [CrossRef]
- Nulton, J.; Salamon, P.; Andresen, B.; Anmin, Q. Quasistatic processes as step equilibrations. J. Chem. Phys. 1985, 83, 334–338. [Google Scholar] [CrossRef]
- Sivak, D.A.; Crooks, G.E. Thermodynamic metrics and optimal paths. Phys. Rev. Lett. 2012, 8, 190602. [Google Scholar] [CrossRef] [PubMed]
- Plastino, A.R.; Casas, M.; Plastino, A. Fisher’s information, Kullback’s measure, and H-theorems. Phys. Lett. A 1998, 246, 498–504. [Google Scholar] [CrossRef]
- Polettini, M.; Esposito, M. Nonconvexity of the relative entropy for Markov dynamics: A Fisher information approach. Phys. Rev. E. 2013, 88, 012112. [Google Scholar] [CrossRef] [PubMed]
- Naudts, J. Quantum statistical manifolds. Entropy 2018, 20, 472. [Google Scholar] [CrossRef]
- Nicholson, S.B.; Kim, E. Investigation of the statistical distance to reach stationary distributions. Phys. Lett. A 2015, 379, 83–88. [Google Scholar] [CrossRef]
- Nicholson, S.B.; Kim, E. Structures in sound: Analysis of classical music using the information length. Entropy 2016, 18, 258. [Google Scholar] [CrossRef]
- Heseltine, J.; Kim, E. Novel mapping in non-equilibrium stochastic processes. J. Phys. A Math. Theor. 2016, 49, 175002. [Google Scholar] [CrossRef]
- Kim, E.; Lee, U.; Heseltine, J.; Hollerbach, R. Geometric structure and geodesic in a solvable model of nonequilibrium process. Phys. Rev. E 2016, 93, 062127. [Google Scholar] [CrossRef] [PubMed]
- Kim, E.; Hollerbach, R. Signature of nonlinear damping in geometric structure of a nonequilibrium process. Phys. Rev. E 2017, 95, 022137. [Google Scholar] [CrossRef] [PubMed]
- Hollerbach, R.; Kim, E. Information geometry of non-equilibrium processes in a bistable system with a cubic damping. Entropy 2017, 19, 268. [Google Scholar] [CrossRef]
- Kim, E.; Tenkès, L.M.; Hollerbach, R.; Radulescu, O. Far-from-equilibrium time evolution between two gamma distributions. Entropy 2017, 19, 511. [Google Scholar] [CrossRef]
- Tenkès, L.M.; Hollerbach, R.; Kim, E. Time-dependent probability density functions and information geometry in stochastic logistic and Gompertz models. J. Stat. Mech. Theory Exp. 2017, 2017, 123201. [Google Scholar] [CrossRef] [Green Version]
- Kim, E.; Lewis, P. Information length in quantum system. J. Stat. Mech. Theory Exp. 2018, 2018, 043106. [Google Scholar] [CrossRef]
- Risken, H. The Fokker–Planck Equation: Methods of Solutions and Applications; Springer: Berlin, Germany, 2013. [Google Scholar]
- Klebaner, F. Introduction to Stochastic Calculus with Applications; Imperial College Press: London, UK, 2012. [Google Scholar]
- Kim, E.; Hollerbach, R. Time-dependent probability density function in cubic stochastic processes. Phys. Rev. E 2016, 94, 052118. [Google Scholar] [CrossRef] [PubMed]
- Ott, E. Chaos in Dynamical Systems; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Kern Scores. Available online: http://kernscores.stanford.edu/ (accessed on 12 July 2016).
- Andrews, M. Quantum mechanics with uniform forces. Am. J. Phys. 2018, 78, 1361–1364. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E.-j. Investigating Information Geometry in Classical and Quantum Systems through Information Length. Entropy 2018, 20, 574. https://doi.org/10.3390/e20080574
Kim E-j. Investigating Information Geometry in Classical and Quantum Systems through Information Length. Entropy. 2018; 20(8):574. https://doi.org/10.3390/e20080574
Chicago/Turabian StyleKim, Eun-jin. 2018. "Investigating Information Geometry in Classical and Quantum Systems through Information Length" Entropy 20, no. 8: 574. https://doi.org/10.3390/e20080574
APA StyleKim, E. -j. (2018). Investigating Information Geometry in Classical and Quantum Systems through Information Length. Entropy, 20(8), 574. https://doi.org/10.3390/e20080574