Application of ICEEMDAN Energy Entropy and AFSA-SVM for Fault Diagnosis of Hoist Sheave Bearing


Abstract
:1. Introduction
2. Feature Extraction of Bearing Vibration Signals Based on ICEEMDAN Energy Entropy
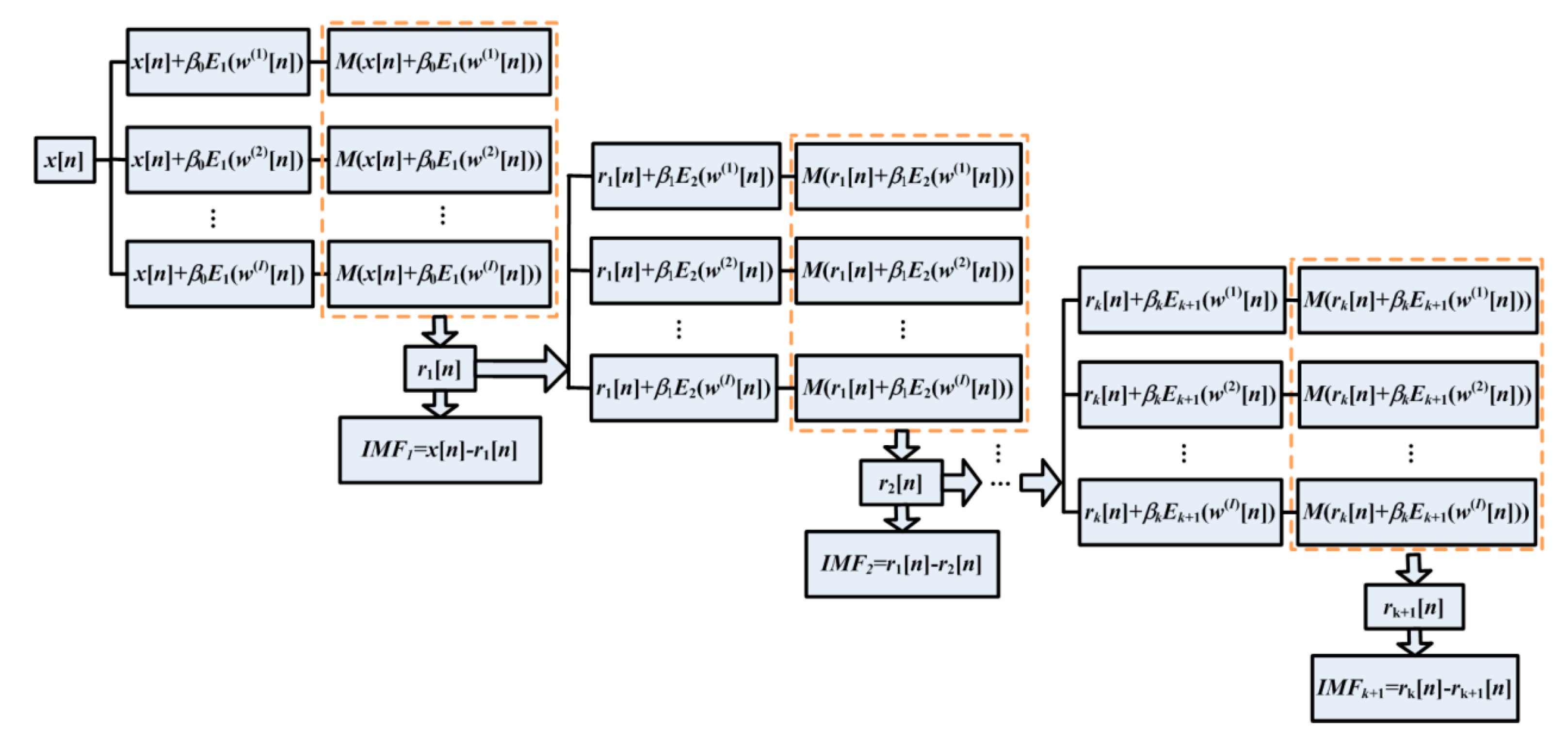
2.1. Improved Complete Ensemble EMD
2.2. ICEEMDAN Energy Entropy
3. SVM Fault-Diagnosis Model Based on AFSA Optimization
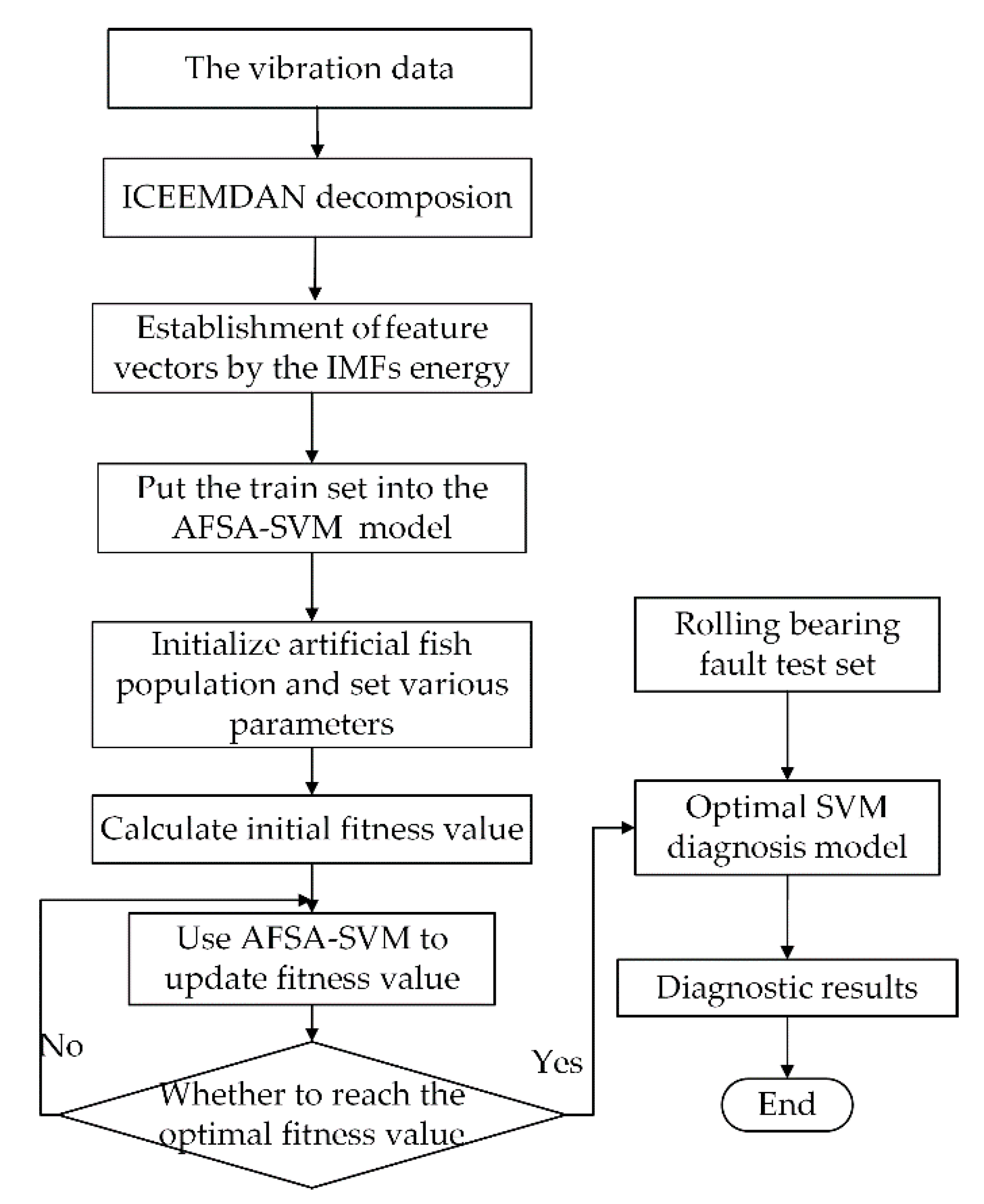
- Step 1
- Collect vibration data of various faults of bearings, extract fault characteristics of the data, construct train sets and test sets to test the generalized performance;
- Step 2
- Initialize the fish swarm. Since there are two adjustable parameters, each fish is composed of two dimensions, and the parameters of the algorithm are set;
- Step 3
- Initially set the value range of the penalty factor γ and the radial basis kernel parameter σ2 to be optimized in the SVM;
- Step 4
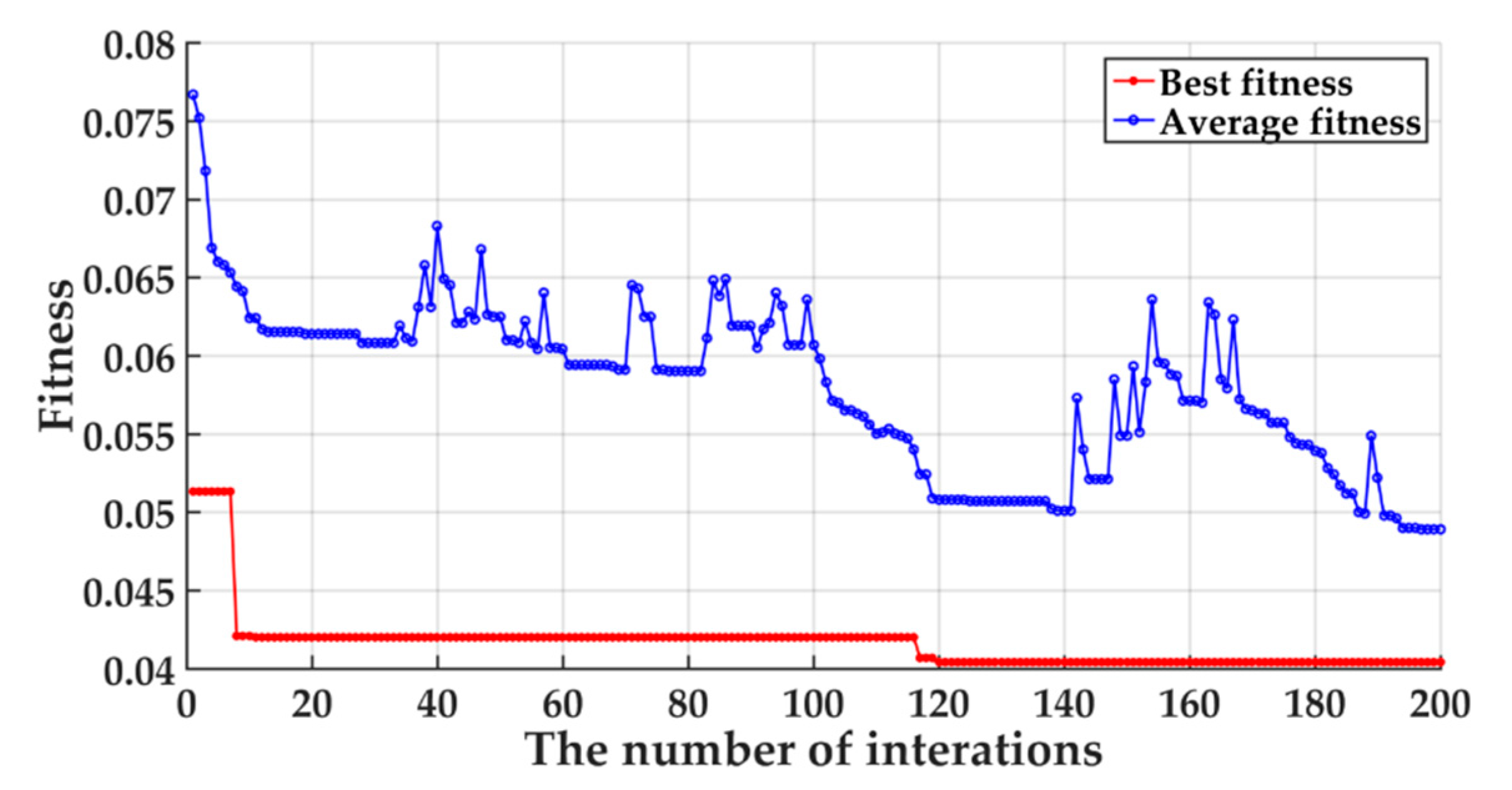
- After the parameters are initialized, the train samples are used to iteratively optimize the parameters (γ and σ2). Take the mean square error (MSE) of the known fault categories and train results as the fitness function. The optimal SVM model is obtained when the fitness value is the smallest.
- Step 5
- Finally, the diagnosis result is obtained when the test set is input into the optimized SVM diagnostic model.
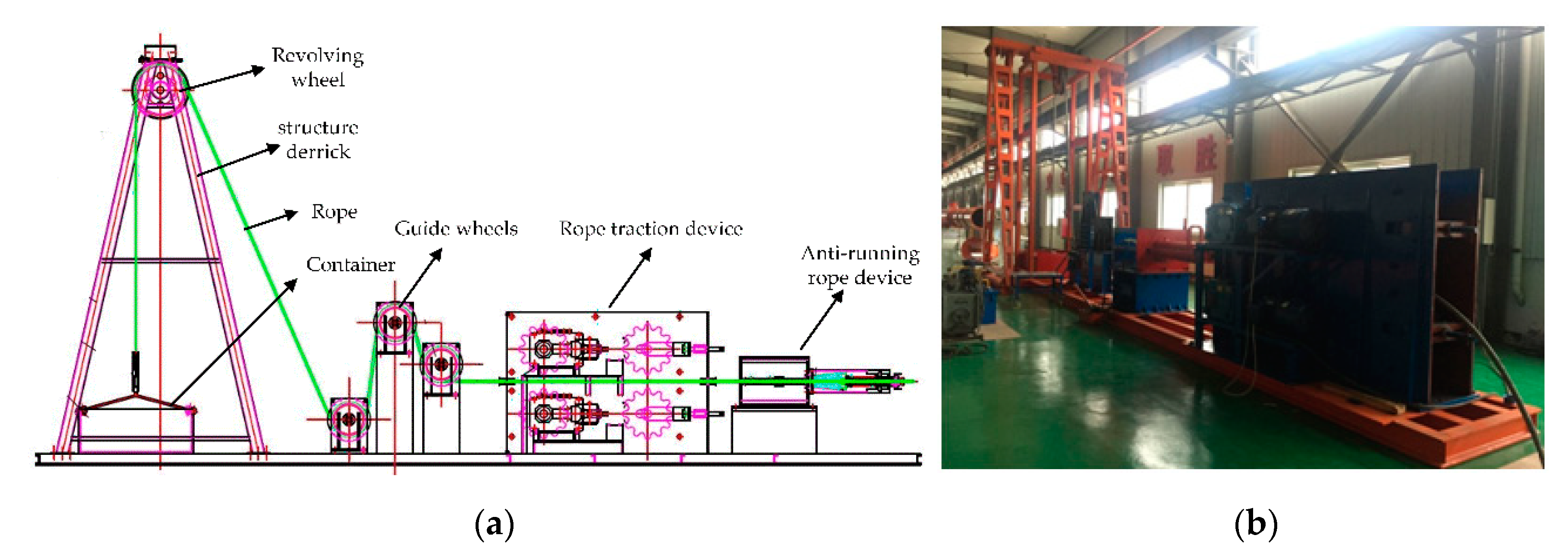
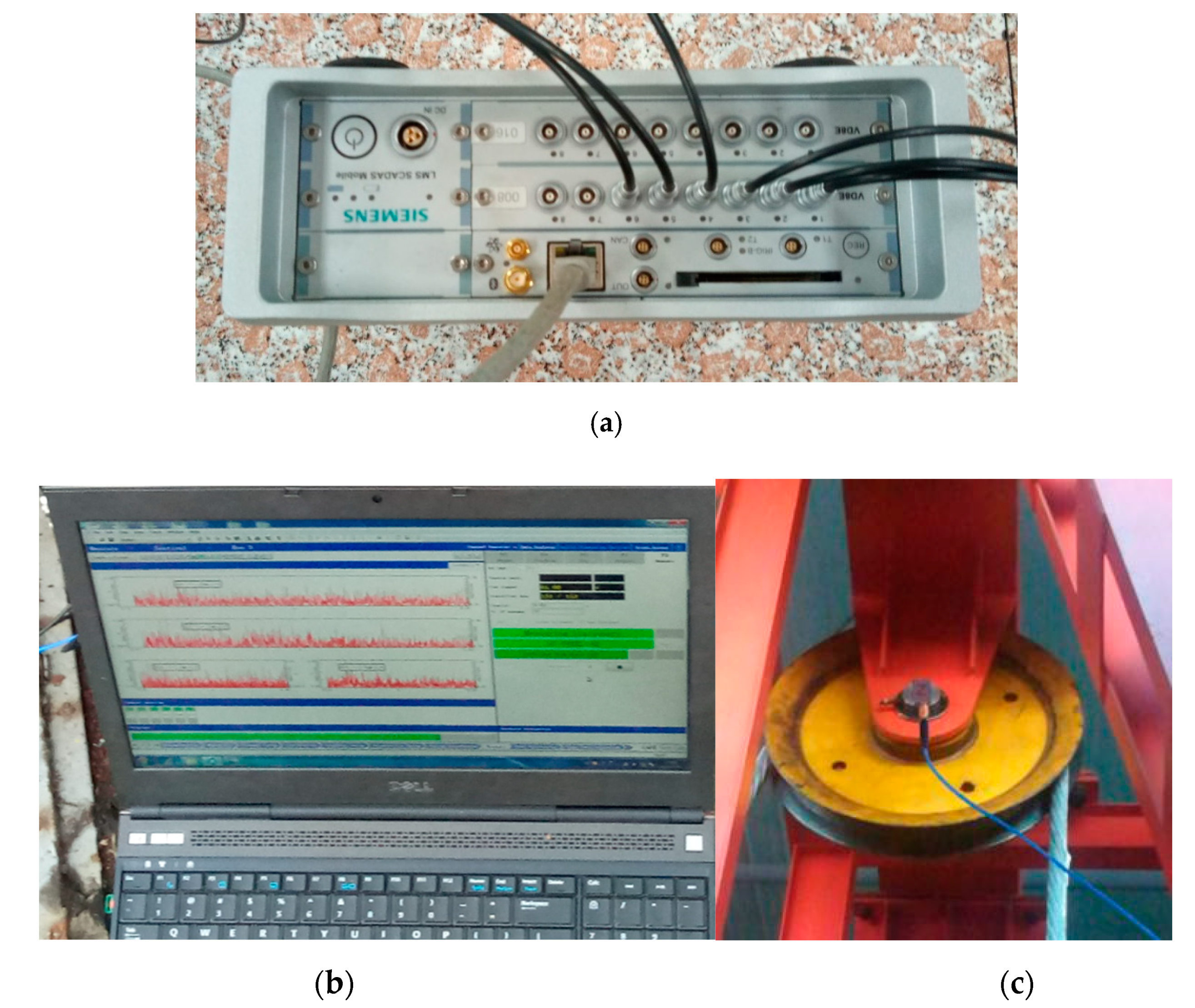
4. Experiment
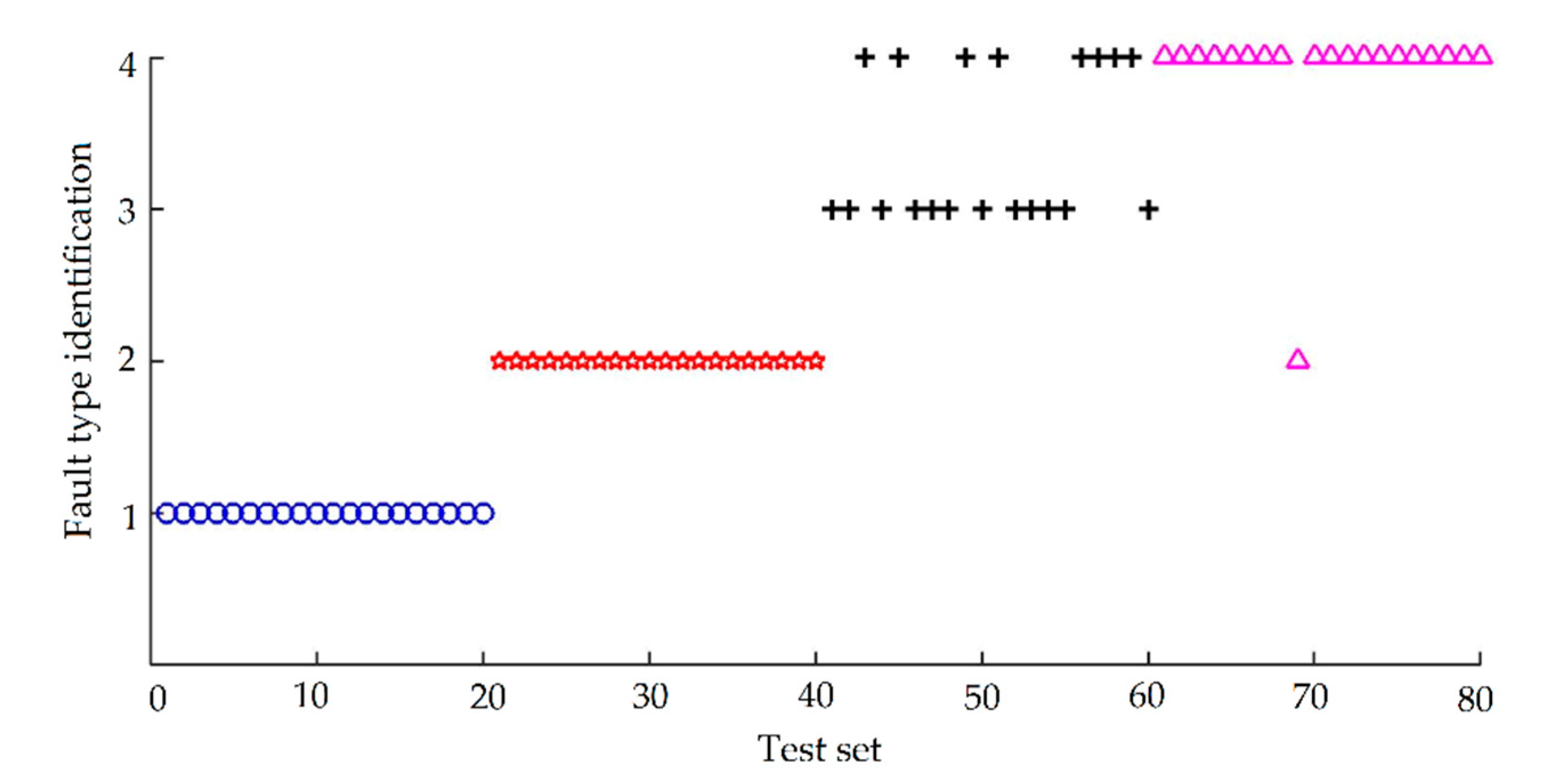
5. Fault-Diagnosis Results
5.1. Fault Diagnosis Result without Optimization
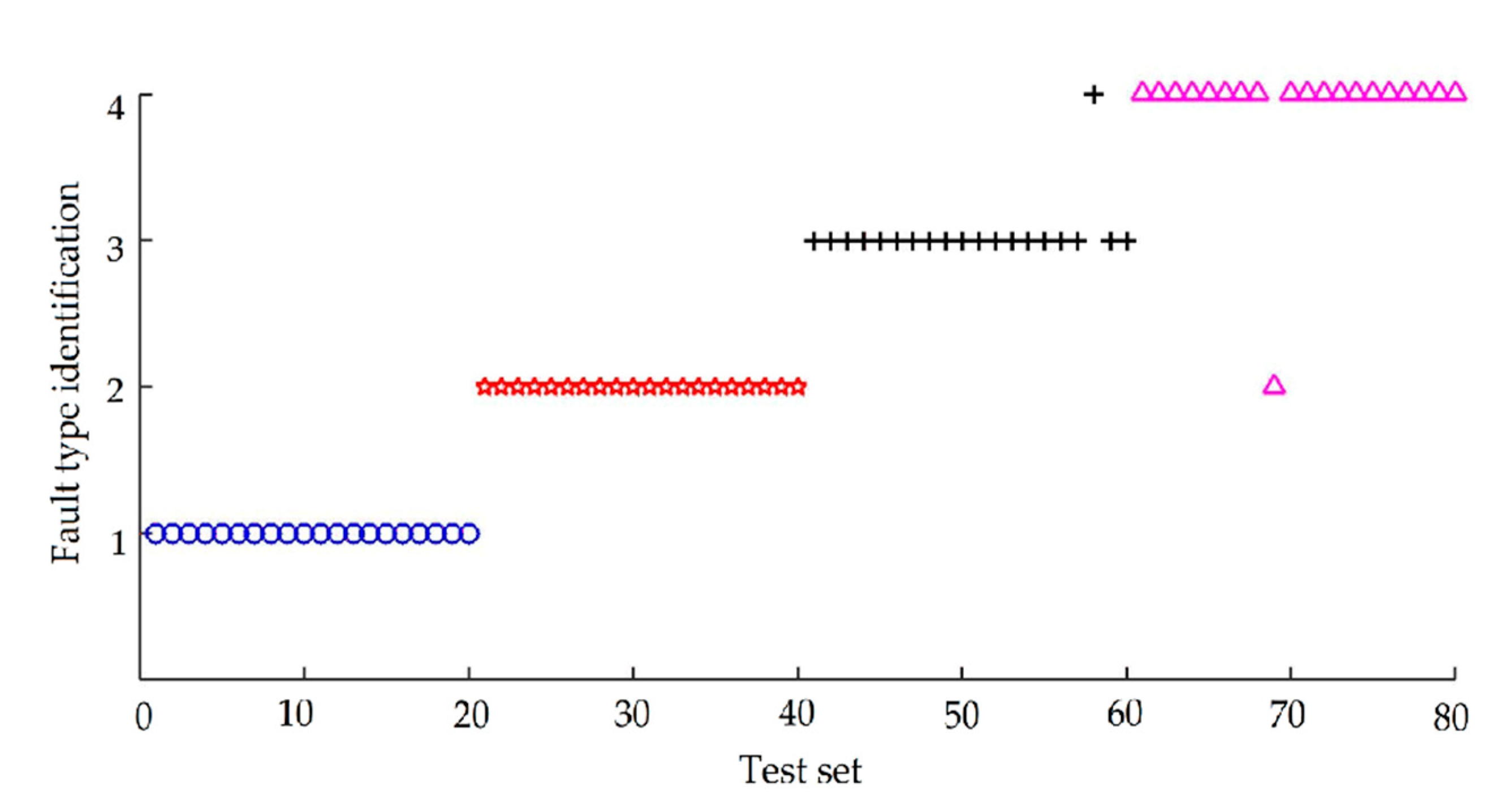
5.2. Fault-Diagnosis Result of AFSA-SVM
6. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mishra, C.; Samantaray, A.K.; Chakraborty, G. Rolling element bearing fault diagnosis under slow speed operation using wavelet de-noising. Measurement 2017, 103, 77–86. [Google Scholar] [CrossRef]
- Bin, G.F.; Gao, J.J.; Li, X.J.; Dhillon, B.S. Early fault diagnosis of rotating machinery based on wavelet packets—Empirical mode decomposition feature extraction and neural network. Mech. Syst. Signal Process. 2012, 27, 696–711. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Zhang, C.H.; Sun, J.B.; Guo, J. Improved wind speed prediction using empirical mode decomposition. Adv. Electr. Comput. Eng. 2018, 18, 3–10. [Google Scholar] [CrossRef]
- Zhang, Z.; Entezami, M.; Stewart, E.; Roberts, C. Enhanced fault diagnosis of roller bearing elements using a combination of empirical mode decomposition and minimum entropy deconvolution. Proc. Inst. Mech. Eng. Part C-J. Eng. Mech. Eng. Sci. 2015, 231, 655–671. [Google Scholar] [CrossRef]
- Yang, F.; Kou, Z.; Wu, J.; Li, T. Application of mutual information-sample entropy based MED-ICEEMDAN de-noising scheme for weak fault diagnosis of hoist bearing. Entropy 2018, 20, 667. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Lin, J.; Liu, Z.; Huang, C. A morphological filtering method based on particle swarm optimization for railway vehicle bearing fault diagnosis. Shock Vib. 2019, 2019, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.; Chen, B.; Zhang, W. Adaptive multipoint optimal minimum entropy deconvolution adjusted and application to fault diagnosis of rolling element bearings. IEEE Sens. J. 2019, 19, 12153–12164. [Google Scholar] [CrossRef]
- Zheng, K.; Yang, D.; Zhang, B.; Xiong, J.; Luo, J.; Dong, Y. A group sparse representation method in frequency domain with adaptive parameters optimization of detecting incipient rolling bearing fault. J. Sound Vibr. 2019, 462, 114931. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, Z.; Gao, X.; Luo, L. A fault diagnosis method of train wheelset rolling bearing combined with improved LMD and FK. J. Sens. 2019, 2019, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Acoustic fault analysis of three commutator motors. Mech. Syst. Signal Process. 2019, 133, 106226. [Google Scholar] [CrossRef]
- Glowacz, A. Recognition of acoustic signals of commutator motors. Appl. Sci. 2018, 8, 2630. [Google Scholar] [CrossRef] [Green Version]
- Baser, F.; Demirhan, H. A fuzzy regression with support vector machine approach to the estimation of horizontal global solar radiation. Energy 2017, 123, 229–240. [Google Scholar] [CrossRef]
- Marnerides, A.K.; Malinowski, S.; Morla, R.; Kim, H.S. Fault diagnosis in DSL networks using support vector machines. Comput. Commun. 2015, 62, 72–84. [Google Scholar] [CrossRef] [Green Version]
- Xanthopoulos, P.; Razzaghi, T. A weighted support vector machine method for control chart pattern recognition. Comput. Ind. Eng. 2014, 70, 134–149. [Google Scholar] [CrossRef]
- Jeong, K.; Choi, S. Model-based sensor fault diagnosis of vehicle suspensions with a support vector machine. Int. J. Automot. Technol. 2019, 20, 961–970. [Google Scholar] [CrossRef]
- Selvathi, D.; Suganya, K. Support vector machine based method for automatic detection of diabetic eye disease using thermal images. In Proceedings of the 2019 1st international conference on innovations in information and communication technology (ICIICT), Chennai, India, 25–26 April 2019. [Google Scholar]
- Wang, Z.; Shao, C.; Zhu, L. Soft-sensing modeling and intelligent optimal control strategy for distillation yield rate of atmospheric distillation oil refining process. Chin. J. Chem. Eng. 2019, 24, 1113–1124. [Google Scholar] [CrossRef]
- Gu, J.; Peng, Y.; Lu, H.; Cao, S.; Cao, B. Fault diagnosis of spindle device in hoist using variational mode decomposition and statistical features. Shock Vib. 2020, 2020, 8849513. [Google Scholar]
- Li, R.; Ran, C.; Zhang, B.; Han, L.; Feng, S. Rolling bearings fault diagnosis based on improved complete ensemble empirical mode decomposition with adaptive noise, nonlinear entropy, and ensemble SVM. Appl. Sci. 2020, 10, 5542. [Google Scholar] [CrossRef]
- Van, M.; Hoang, D.T.; Kang, H.J. Bearing fault diagnosis using a particle swarm optimization-least squares wavelet support vector machine classifier. Sensors 2020, 20, 3422. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Kandukuri, S.T.; Khang, H.V.; Robbersmyr, K.G. Early detection and classification of bearing faults using support vector machine algorithm. In Proceedings of the 2017 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Nottingham, UK, 20–21 April 2017. [Google Scholar]
- Islam, M.M.M.; Kim, J.M. Reliable multiple combined fault diagnosis of bearings using heterogeneous feature models and multiclass support vector machines. Reliab. Eng. Syst. Safe 2018, 184, 55–66. [Google Scholar] [CrossRef]
- Ma, C.; Yao, J.; Xiao, X.; Zhang, X.; Jiang, Y. Fault diagnosis of head sheaves based on vibration measurement and data mining method. Adv. Mech. Eng. 2020, 12, 1–8. [Google Scholar] [CrossRef]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Shen, W.; Guo, X.; Wu, C.; Wu, D. Forecasting stock indices using radial basis function neural networks optimizedby artificial fish swarm algorithm. Knowl. Based Syst. 2011, 24, 378–385. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Condition | Normal Bearing | Outer Race Fault | Inner Race Fault | Ball Fault |
|---|---|---|---|---|
| Energy Entropy | 2.0511 | 0.4431 | 0.8033 | 1.2406 |
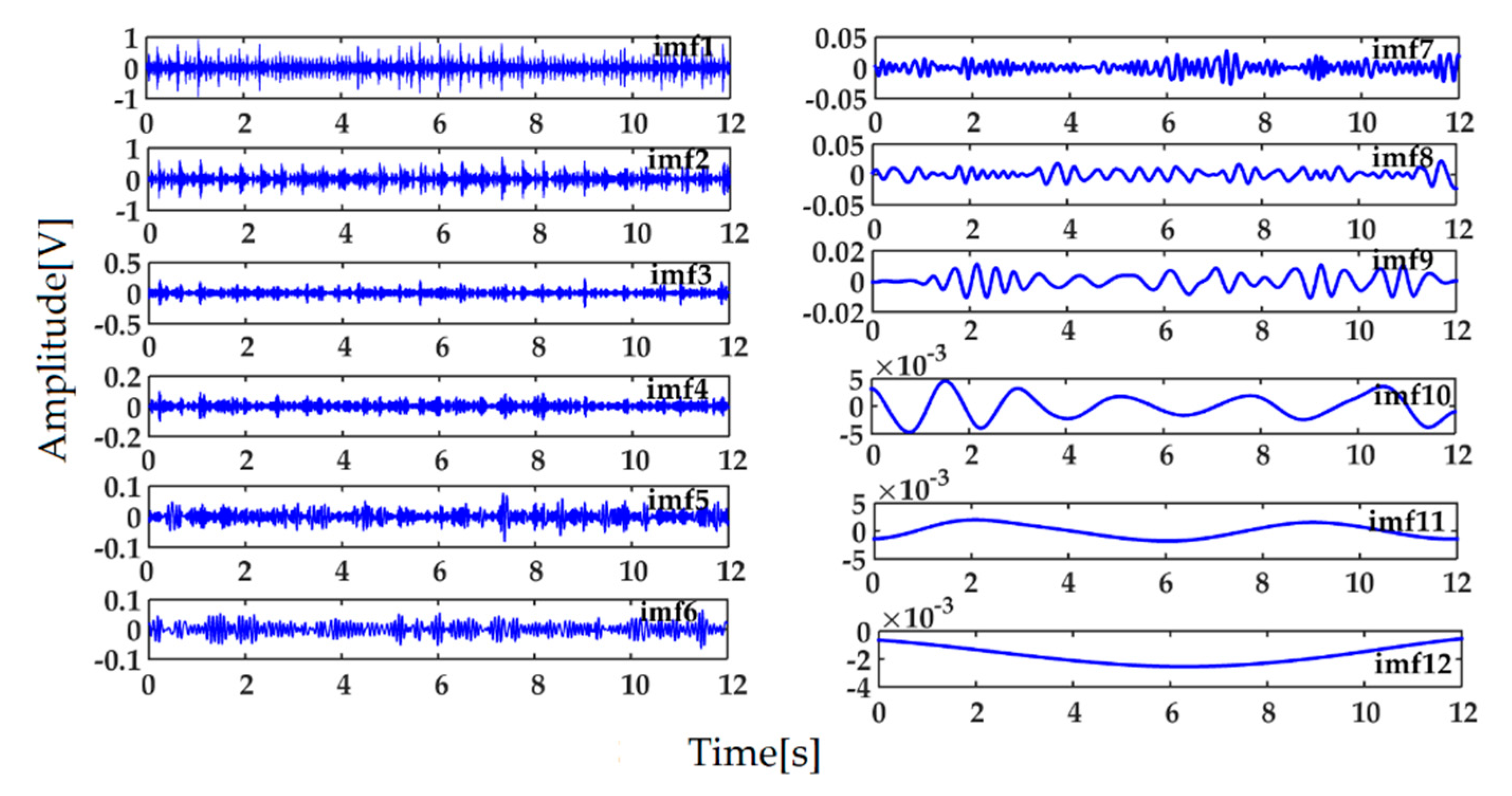
| IMF | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 |
|---|---|---|---|---|---|---|---|---|
| Energy (Ei/E) | 0.6512 | 0.2569 | 0.0620 | 0.0087 | 0.0026 | 0.0015 | 0.0008 | 0.0006 |
| Bearing State | Feature Vector | Fault Type Identification | |||
|---|---|---|---|---|---|
| Normal bearing | 0.2619 | 0.2451 | 0.1781 | 0.0219 | 1 |
| 0.2641 | 0.2535 | 0.1739 | 0.0733 | ||
| 0.2594 … | 0.2464 … | 0.2049 … | 0.0779 … | ||
| 0.2593 | 0.2423 | 0.1882 | 0.0352 | ||
| 0.2567 | 0.2428 | 0.1969 | 0.0455 | ||
| Inner race defect | 0.3659 | 0.2513 | 0.1589 | 0.0140 | 2 |
| 0.3628 | 0.2418 | 0.1411 | 0.0159 | ||
| 0.3603 … | 0.2426 … | 0.1507 … | 0.0365 … | ||
| 0.3665 | 0.2507 | 0.1394 | 0.0365 | ||
| 0.3653 | 0.2459 | 0.1629 | 0.0412 | ||
| Outer race defect | 0.3668 | 0.2374 | 0.2029 | 0.0979 | 3 |
| 0.3678 | 0.2522 | 0.2479 | 0.1145 | ||
| 0.3569 … | 0.2489 … | 0.2639 … | 0.1112 … | ||
| 0.3610 | 0.2436 | 0.2389 | 0.1268 | ||
| 0.3675 | 0.2658 | 0.2507 | 0.1069 | ||
| Ball defect | 0.2401 | 0.2549 | 0.2309 | 0.1185 | 4 |
| 0.2545 | 0.2672 | 0.2606 | 0.1136 | ||
| 0.2017 … | 0.2967 … | 0.2245 … | 0.1042 … | ||
| 0.2386 | 0.2429 | 0.2354 | 0.0961 | ||
| 0.2247 | 0.2722 | 0.2274 | 0.0919 | ||
| Prediction Algorithm | Sample Number (Training + Prediction) | Accuracy for Training Data | Accuracy for Forecast Data | MSE | Running Time |
|---|---|---|---|---|---|
| SVM without optimization | 240 + 80 | 100% | 87.5% | 0.1625 | 0.323054 s |
| Prediction Algorithm | Sample Number (Training + Prediction) | Accuracy for Training Data | Accuracy for Forecast Data | MSE | Running Time |
|---|---|---|---|---|---|
| SVM | 240 + 80 | 92.5% | 87.5% | 0.1625 | 0.32305 s |
| AFSA-SVM | 240 + 80 | 100% | 97.5% | 0.041584 | 4.22307 s |
| Prediction Algorithm | Sample Number (Training + Prediction) | Accuracy for Training Data | Accuracy for Forecast Data | MSE | Running Time |
|---|---|---|---|---|---|
| AFSA-SVM | 240 + 80 | 100% | 97.5% | 0.041584 | 4.22307 s |
| 240 + 160 | 100% | 98.2% | 0.036632 | 5.45123 s | |
| 480 + 80 | 100% | 99.1% | 0.025306 | 6.82108 s |
| Feature Vector Construction Methods | Sample Number (Training + Prediction) | Accuracy (%) | ||||
|---|---|---|---|---|---|---|
| Normal Bearing | Inner Race Defect | Outer Race Defect | Ball Defect | Overall Accuracy | ||
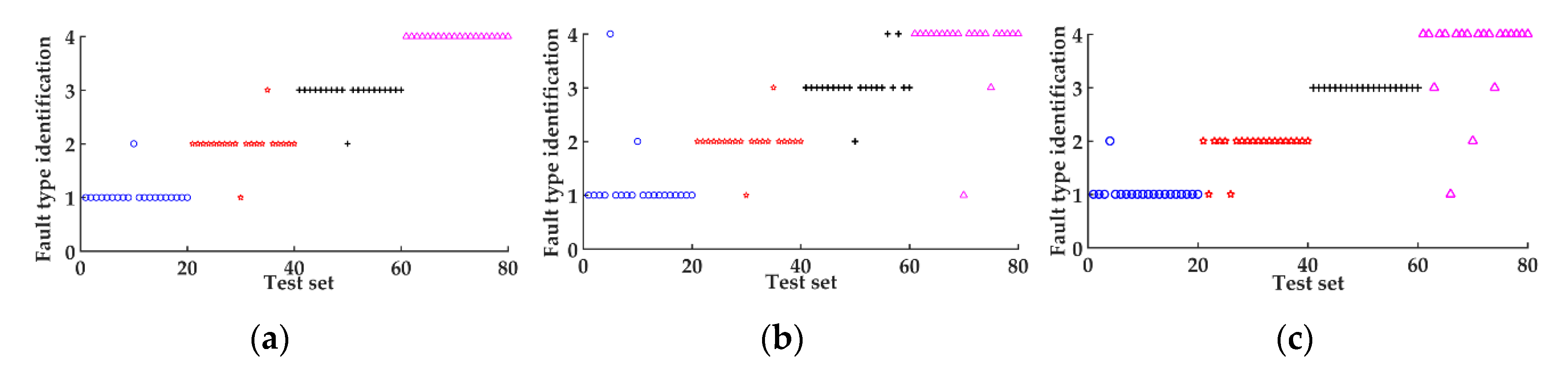
| EMD | 240 + 80 | 90 | 90 | 85 | 90 | 88.75 |
| energy entropy | ||||||
| EEMD | 240 + 80 | 95 | 90 | 100 | 80 | 91.25 |
| energy entropy | ||||||
| ICEEMDAN energy entropy | 240 + 80 | 100 | 100 | 95 | 95 | 97.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kou, Z.; Yang, F.; Wu, J.; Li, T. Application of ICEEMDAN Energy Entropy and AFSA-SVM for Fault Diagnosis of Hoist Sheave Bearing. Entropy 2020, 22, 1347. https://doi.org/10.3390/e22121347
Kou Z, Yang F, Wu J, Li T. Application of ICEEMDAN Energy Entropy and AFSA-SVM for Fault Diagnosis of Hoist Sheave Bearing. Entropy. 2020; 22(12):1347. https://doi.org/10.3390/e22121347
Chicago/Turabian StyleKou, Ziming, Fen Yang, Juan Wu, and Tengyu Li. 2020. "Application of ICEEMDAN Energy Entropy and AFSA-SVM for Fault Diagnosis of Hoist Sheave Bearing" Entropy 22, no. 12: 1347. https://doi.org/10.3390/e22121347
APA StyleKou, Z., Yang, F., Wu, J., & Li, T. (2020). Application of ICEEMDAN Energy Entropy and AFSA-SVM for Fault Diagnosis of Hoist Sheave Bearing. Entropy, 22(12), 1347. https://doi.org/10.3390/e22121347