
A Hybrid Rao-NM Algorithm for Image Template Matching





Abstract
:1. Introduction
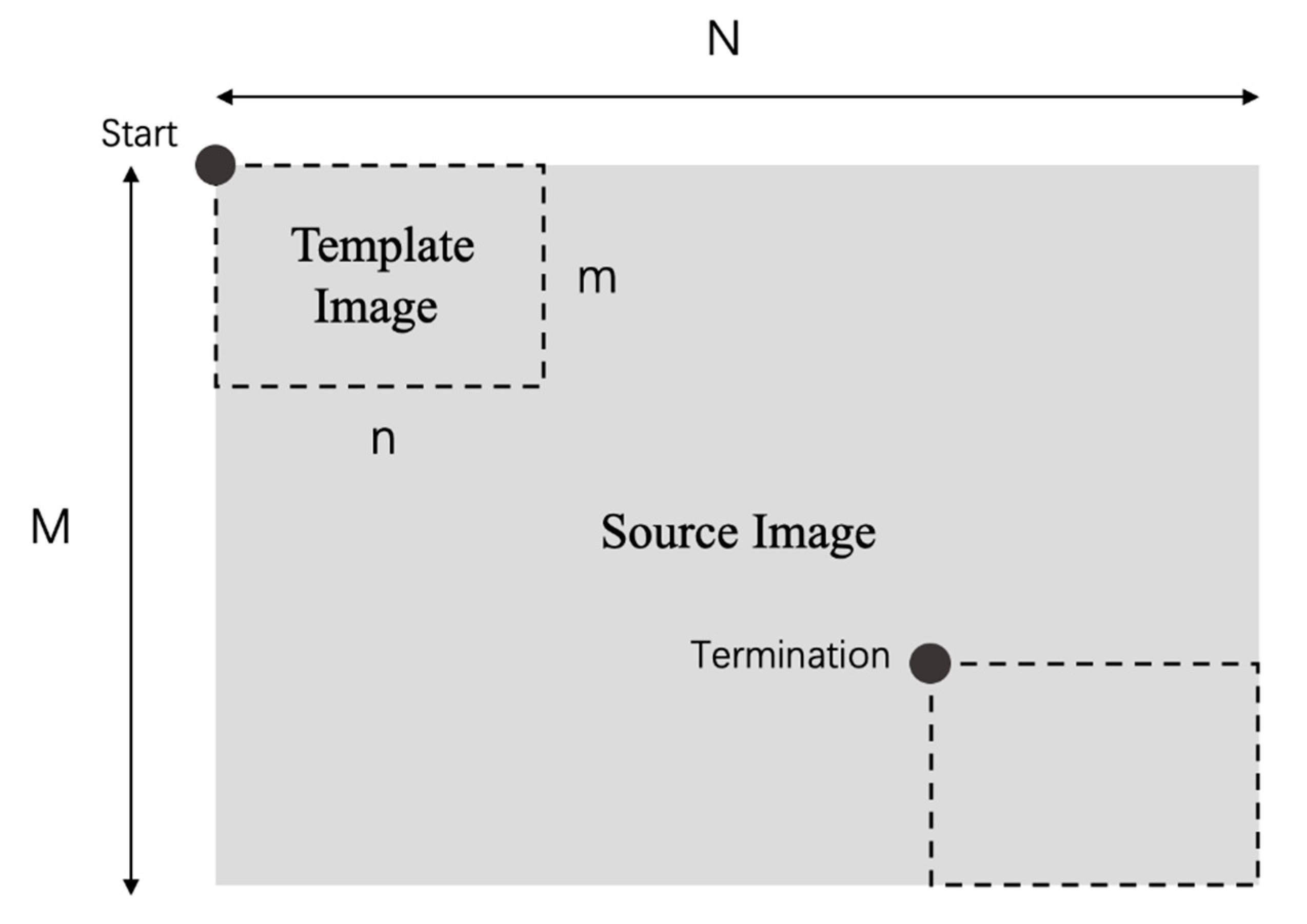
2. Problem Formulation
3. The Proposed Hybrid Rao-NM Algorithm
3.1. Rao-1 Algorithm
- Initialize the common controlling parameters, population size, number of design variables, and termination criteria.
- Determine the best and worst solutions in the population.
- Update the current solution based on the best, worst, and candidate solutions, random interaction according to (2)
- Computer the objective function value for every updated solution. Next, the updated solution will be selected according to (3).
- If the termination conditions are satisfied, the optimization process will stop. Otherwise, the process skips to Step 2.
3.2. NM Method
- Initialization:
- 2.
- Reflection:
- 3.
- Expansion:
- 4.
- Contraction:
- 5.
- Shrinkage:
- 6.
- If the termination condition is met, the computation is stopped and terminates the iteration. Otherwise, return Step 1 to start a new iteration.
3.3. The Hybrid Rao-NM Algorithm
| Algorithm 1. Rao-NM Algorithm. |
|
1: Input: Population Size: N, Number of Iterations: M, Tolerance: e, The ith individual solution at the jth iteration: Ii,j 2: Output: Optimal Solution: I*best 3: for each j: = 1 to N do 4: Initialize Ii,1; 5: end 6: Let j = 1; 7: While (e or j value is satisfied) 8: Update solutions Ii,j based on (2); 9: Obtain the best solution Ibest; 10: Let e = j(Ibest); 11: Let m = m + 1. 12: Update Ibest via NM algorithm to I*best; 13: Return I*best; |
4. Experiment and Analysis
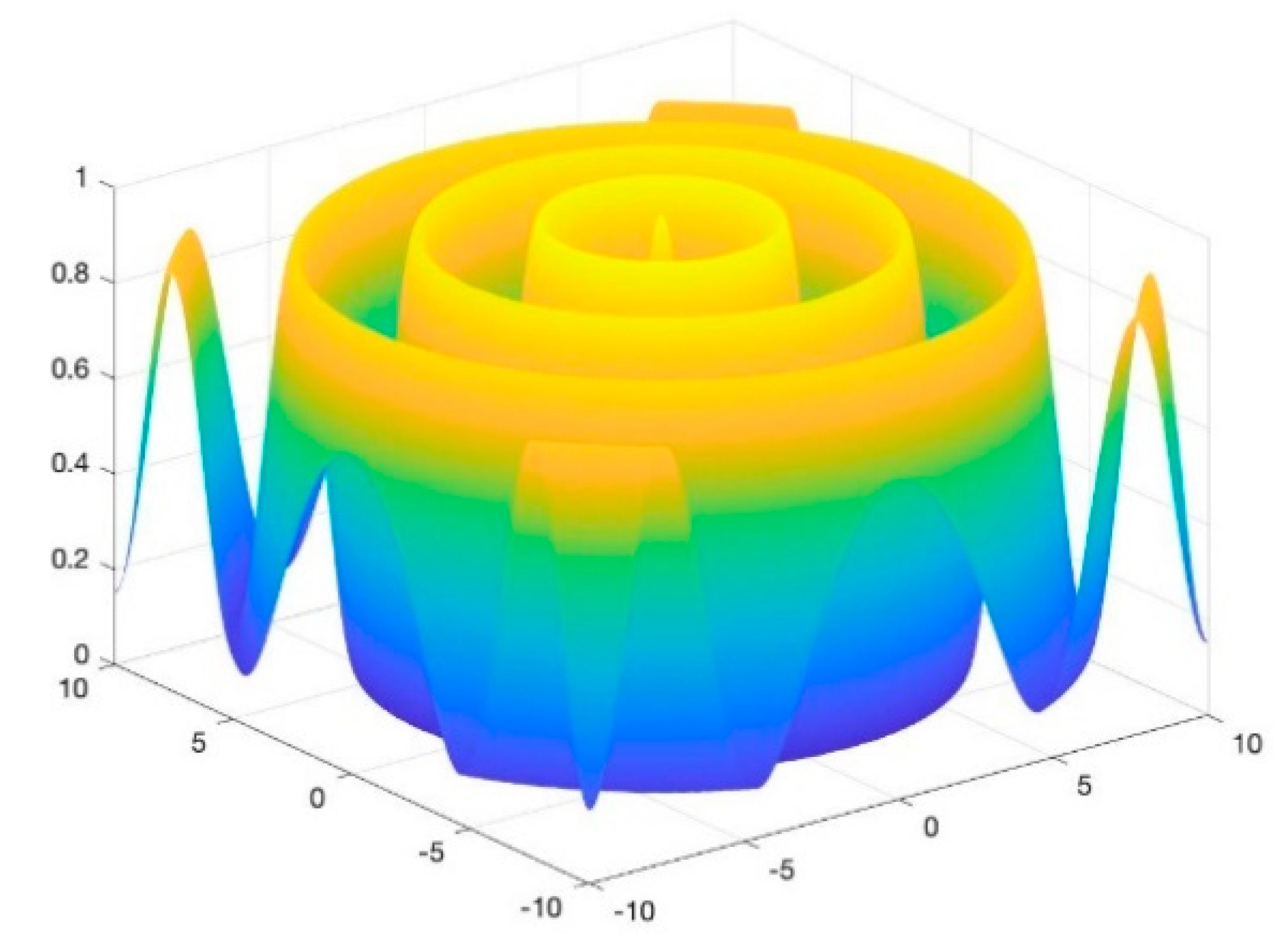
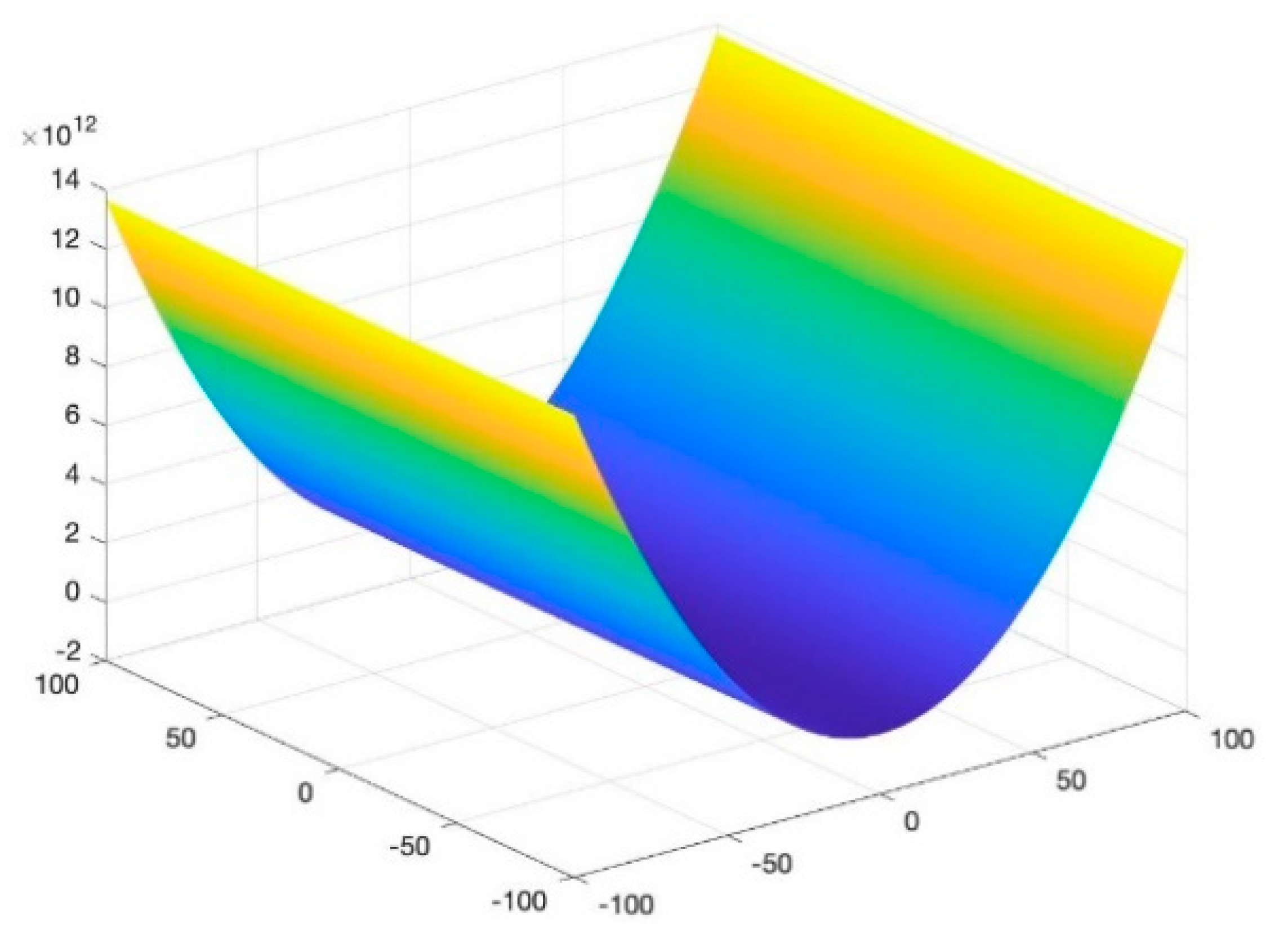
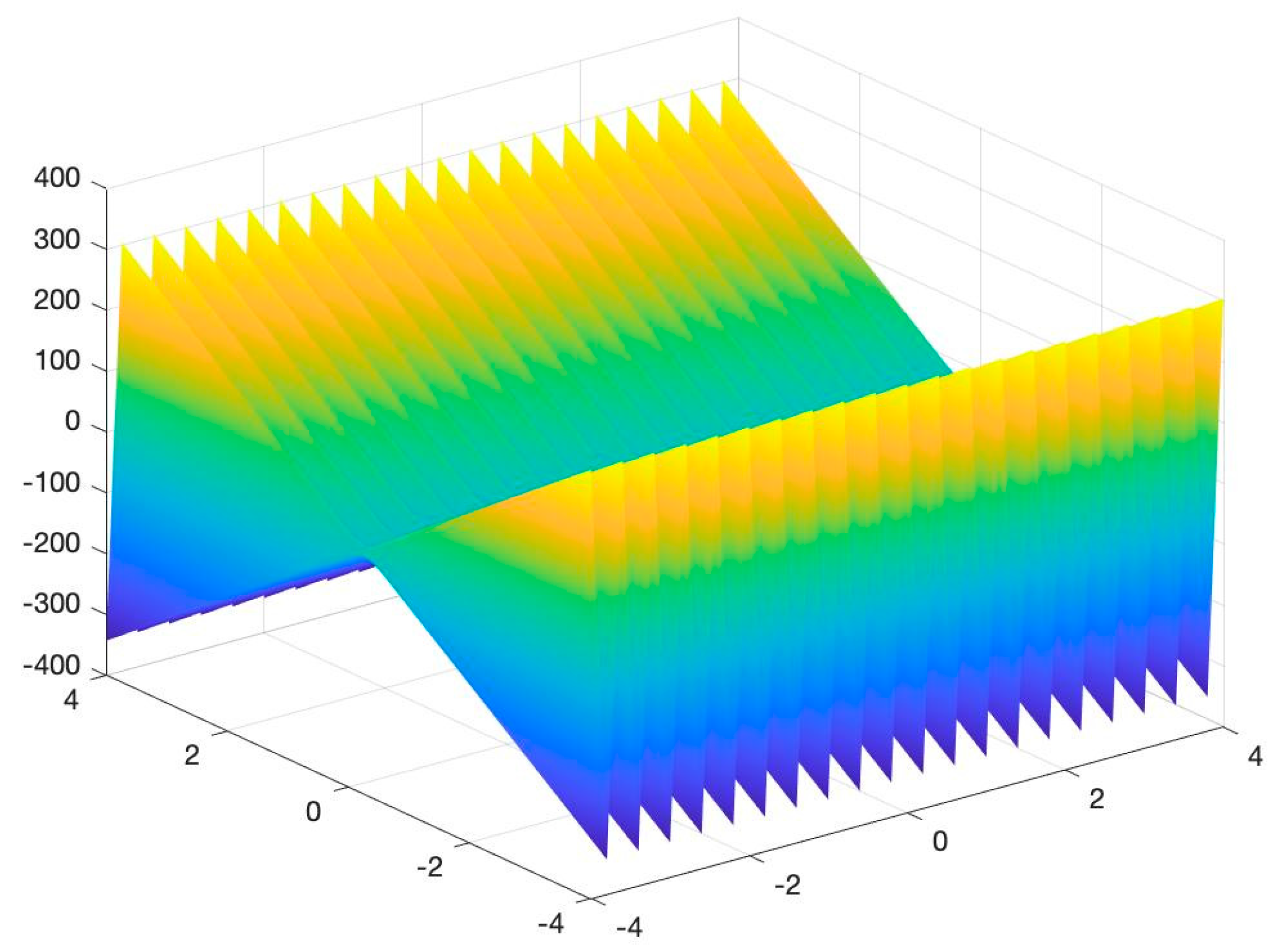
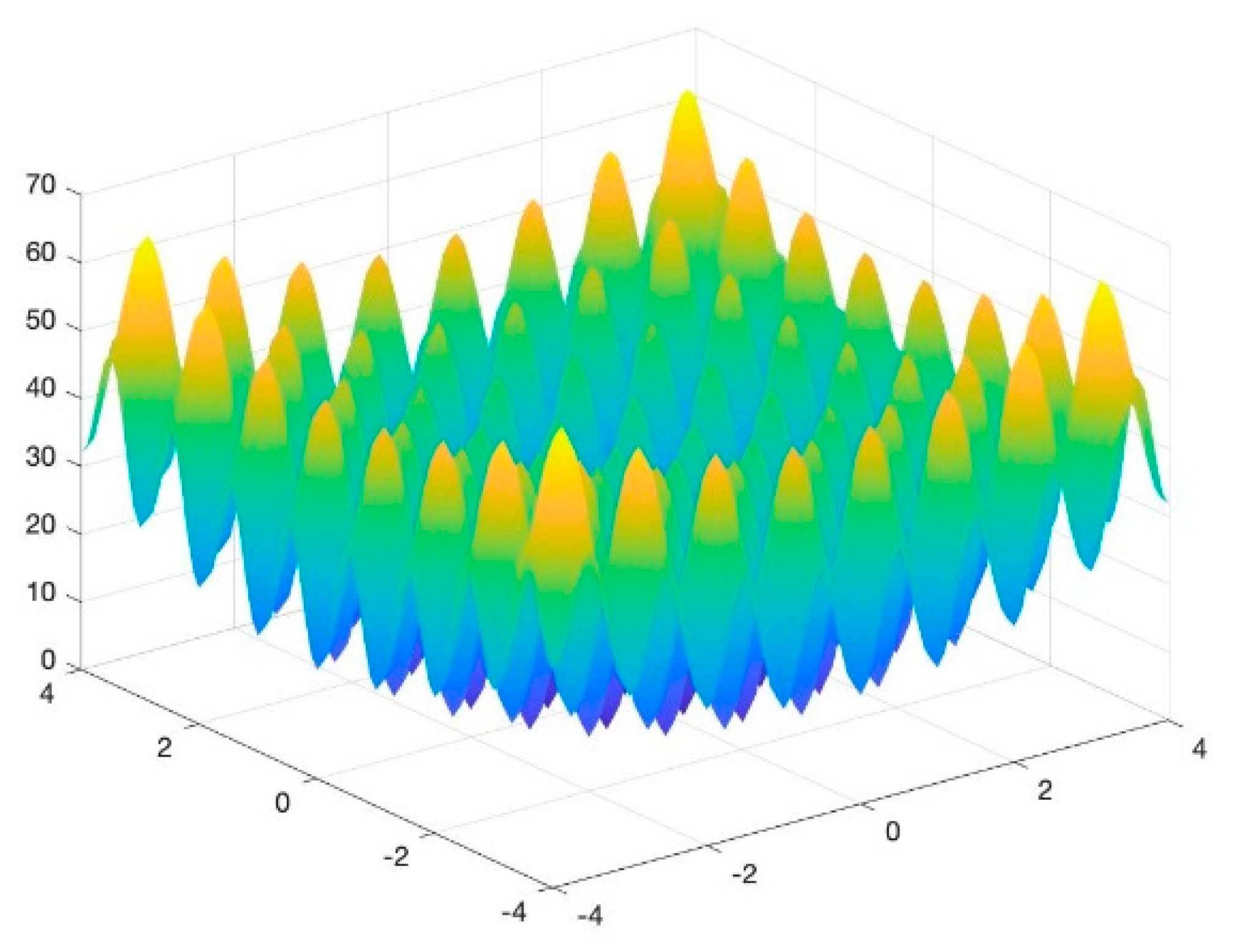
4.1. Benchmarking Test Functions
4.2. Sensitivity Analysis on Controlling Parameters
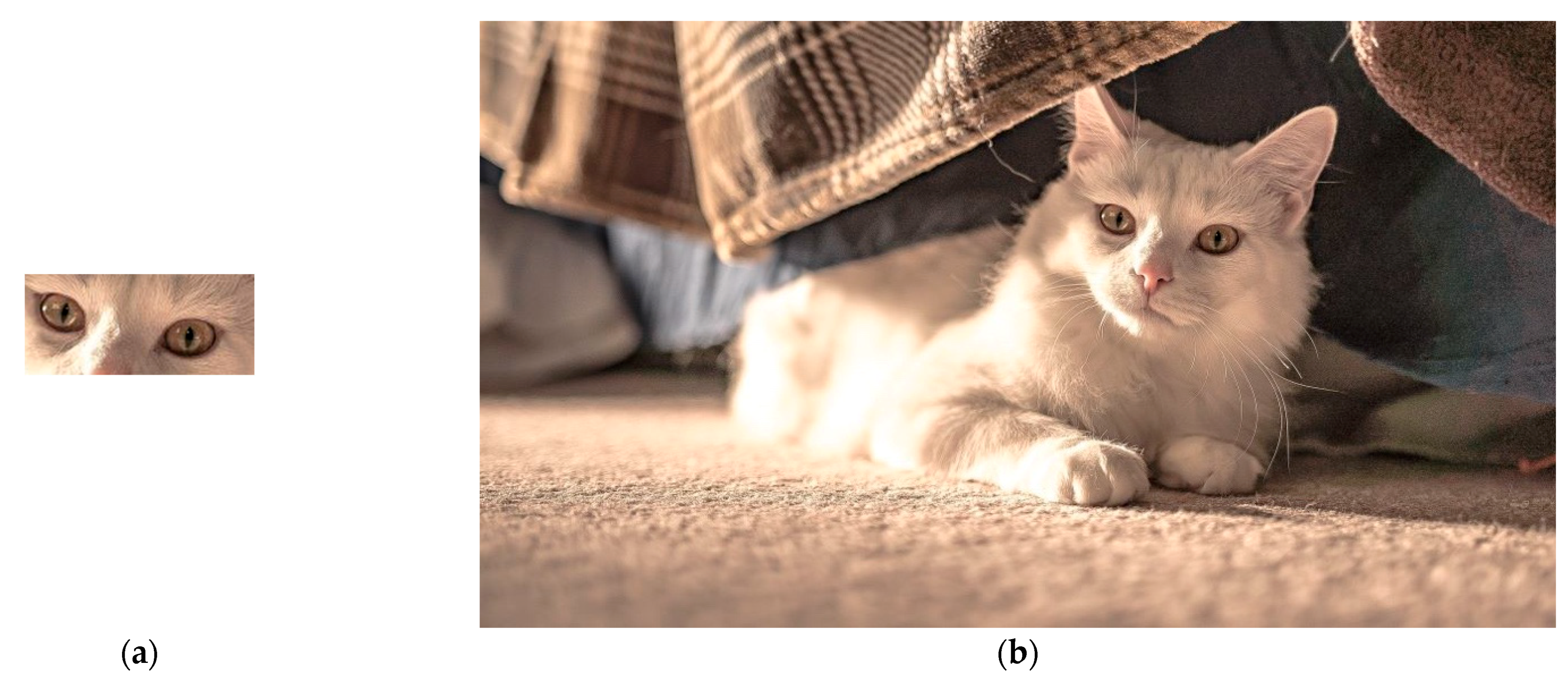
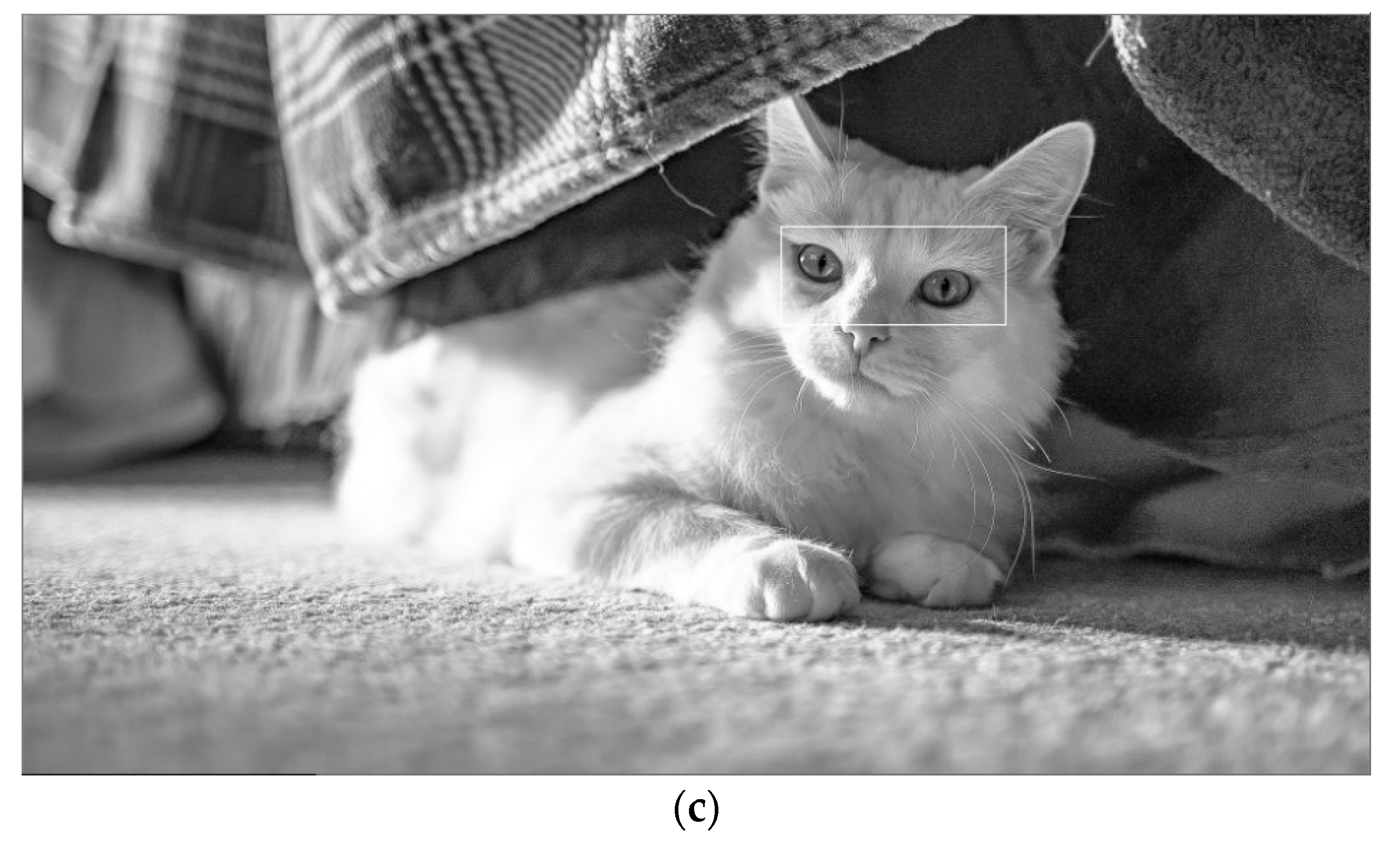
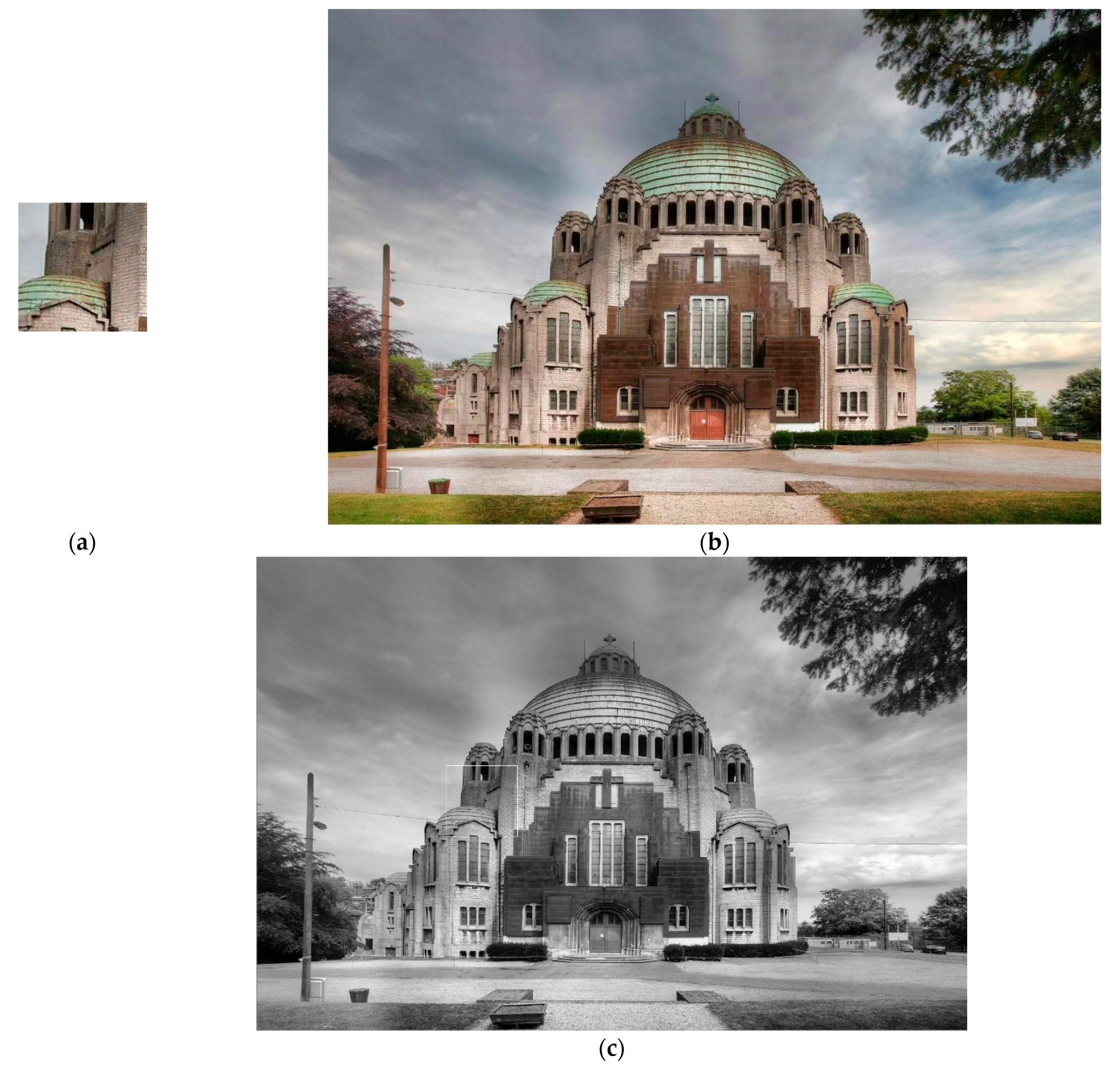
4.3. Template Matching Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Goshtasby, A. Template Matching in Rotated Images. IEEE Trans. Pattern Anal. Mach. Intell. 1985, PAMI-7, 338–344. [Google Scholar] [CrossRef]
- Brunelli, R.; Poggio, T. Face recognition: Features versus templates. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 1042–1052. [Google Scholar] [CrossRef]
- An, L.; Zou, C.; Zhang, L.; Denney, B. Scalable attribute-driven face image retrieval. Neurocomputing 2016, 172, 215–224. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z. Automatic Detection of Wind Turbine Blade Surface Cracks Based on UAV-Taken Images. IEEE Trans. Ind. Electron. 2017, 64, 7293–7303. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z.; Xu, J.; Liu, R. Wind Turbine Blade Breakage Monitoring With Deep Autoencoders. IEEE Trans. Smart Grid 2018, 9, 2824–2833. [Google Scholar] [CrossRef]
- Yang, J.; Liu, J.; Dai, Q. An improved Bag-of-Words framework for remote sensing image retrieval in large-scale image databases. Int. J. Digit. Earth 2015, 8, 273–292. [Google Scholar] [CrossRef]
- Pisek, J.; Lang, M.; Kuusk, J. A note on suitable viewing configuration for retrieval of forest understory reflectance from multi-angle remote sensing data. Remote Sens. Environ. 2015, 156, 242–246. [Google Scholar] [CrossRef]
- Ionescu, B.; Popescu, A.; Radu, A.-L.; Müller, H. Result diversification in social image retrieval: A benchmarking framework. Multimed. Tools Appl. 2016, 75, 1301–1331. [Google Scholar] [CrossRef]
- Liu, Q.; Li, Z. Projective nonnegative matrix factorization for social image retrieval. Neurocomputing 2016, 172, 19–26. [Google Scholar] [CrossRef]
- Kalpathy-Cramer, J.; de Herrera, A.G.S.; Demner-Fushman, D.; Antani, S.; Bedrick, S.; Müller, H. Evaluating performance of biomedical image retrieval systems—An overview of the medical image retrieval task at ImageCLEF 2004–2013. Comput. Med. Imaging Graph. 2015, 39, 55–61. [Google Scholar] [CrossRef] [Green Version]
- Dimitrovski, I.; Kocev, D.; Kitanovski, I.; Loskovska, S.; Džeroski, S. Improved medical image modality classification using a combination of visual and textual features. Comput. Med. Imaging Graph. 2015, 39, 14–26. [Google Scholar] [CrossRef]
- Trojacanec, K.; Kitanovski, I.; Dimitrovski, I.; Loshkovska, S. Medical Image Retrieval for Alzheimer’s Disease Using Data from Multiple Time Points. In Advances in Intelligent Systems and Computing; Loshkovska, S., Koceski, S., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 215–224. [Google Scholar]
- Minaee, S.; Abdolrashidi, A. Highly accurate palmprint recognition using statistical and wavelet features. In Proceedings of the 2015 IEEE Signal Processing and Signal Processing Education Workshop (SP/SPE), Salt Lake City, UT, USA, 9–12 August 2015; pp. 31–36. [Google Scholar]
- Minaee, S.; Luo, P.; Lin, Z.; Bowyer, K. Going Deeper Into Face Detection: A Survey. arXiv 2021, arXiv:2103.14983. [Google Scholar]
- Gao, C.; Chen, Y.; Yu, J.-G.; Sang, N. Pose-guided spatiotemporal alignment for video-based person Re-identification. Inf. Sci. 2020, 527, 176–190. [Google Scholar] [CrossRef]
- Cuevas, E.; Echavarría, A.; Zaldivar-Navarro, D.; Pérez-Cisneros, M. A novel evolutionary algorithm inspired by the states of matter for template matching. Expert Syst. Appl. 2013, 40, 6359–6373. [Google Scholar] [CrossRef]
- Li, B.; Gong, L.-G.; Li, Y. A Novel Artificial Bee Colony Algorithm Based on Internal-Feedback Strategy for Image Template Matching. Sci. World J. 2014, 2014, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Grailu, H.; Lotfizad, M.; Sadoghi-Yazdi, H. An improved pattern matching technique for lossy/lossless compression of binary printed Farsi and Arabic textual images. Int. J. Intell. Comput. Cybern. 2009, 2, 120–147. [Google Scholar] [CrossRef]
- Koutaki, G.; Yata, K.; Uchimura, K.; Kan, M.; Asai, D.; Takeba, M.; Kan, M. Fast and high accuracy pattern matching using multi-stage refining eigen template. In Proceedings of the 19th Korea-Japan Joint Workshop on Frontiers of Computer Vision, Incheon, Korea, 30 January–1 February 2013; pp. 58–63. [Google Scholar] [CrossRef]
- Yang, H.; Huang, C.; Wang, F.; Song, K.; Yin, Z. Robust Semantic Template Matching Using a Superpixel Region Binary Descriptor. IEEE Trans. Image Process. 2019, 28, 3061–3074. [Google Scholar] [CrossRef]
- Buniatyan, D.; Macrina, T.; Ih, D.; Zung, J.; Seung, H.S. Deep Learning Improves Template Matching by Normalized Cross Correlation. arXiv 2017, arXiv:1705.08593. [Google Scholar]
- Brunelli, R. Template Matching Techniques in Computer Vision: Theory and Practice; Wiley: Hoboken, NJ, USA, 2009; ISBN 978-0-470-51706-2. [Google Scholar]
- Lagarias, J.C.; Reeds, J.A.; Wright, M.H.; Wright, P.E. Convergence Properties of the Nelder--Mead Simplex Method in Low Dimensions. SIAM J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; He, Z.; Lee, D.-H.; Kim, K.-J.; Zhang, L.; Yang, X. Robust fuzzy programming method for MRO problems considering location effect, dispersion effect and model uncertainty. Comput. Ind. Eng. 2017, 105, 76–83. [Google Scholar] [CrossRef]
- Chen, X.; Li, X.; Li, P. Toward Communication Efficient Adaptive Gradient Method. In Proceedings of the 2020 ACM-IMS on Foundations of Data Science Conference, ACM, Seattle, WA, USA, 18–20 October 2020; pp. 119–128. [Google Scholar]
- Tang, J.; Egiazarian, K.; Golbabaee, M.; Davies, M. The Practicality of Stochastic Optimization in Imaging Inverse Problems. IEEE Trans. Comput. Imaging 2020, 6, 1471–1485. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Z.; Liang, H.; Huang, C. Parameter estimation of photovoltaic cell model with Rao-1 algorithm. Optik 2020, 210, 163846. [Google Scholar] [CrossRef]
- Liu, M.; Cao, Z.; Zhang, J.; Wang, L.; Huang, C.; Luo, X. Short-term wind speed forecasting based on the Jaya-SVM model. Int. J. Electr. Power Energy Syst. 2020, 121, 106056. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, L.; Huang, C.; Zhang, Z.; Luo, X. Soil Moisture Sensor-based Automated Soil Water Content Cycle Classification with a Hybrid Symbolic Aggregate Approximation Algorithm. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Yan, X.; Song, T.; Wu, Q. An improved cultural algorithm and its application in image matching. Multimed. Tools Appl. 2017, 76, 14951–14968. [Google Scholar] [CrossRef]
- Liu, F.; Duan, H.; Deng, Y. A chaotic quantum-behaved particle swarm optimization based on lateral inhibition for image matching. Optik 2012, 123, 1955–1960. [Google Scholar] [CrossRef]
- Luo, Q.; Li, J.; Zhou, Y. Spotted hyena optimizer with lateral inhibition for image matching. Multimed. Tools Appl. 2019, 78, 34277–34296. [Google Scholar] [CrossRef]
- Huang, L.; Duan, H.; Wang, Y. Hybrid bio-inspired lateral inhibition and Imperialist Competitive Algorithm for complicated image matching. Optik 2014, 125, 414–418. [Google Scholar] [CrossRef]
- Rao, R.V. Rao algorithms: Three metaphor-less simple algorithms for solving optimization problems. Int. J. Ind. Eng. Comput. 2020, 107–130. [Google Scholar] [CrossRef]
- Zahara, E.; Kao, Y.-T. Hybrid Nelder–Mead simplex search and particle swarm optimization for constrained engineering design problems. Expert Syst. Appl. 2009, 36, 3880–3886. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Li, B. An evolutionary approach for image retrieval based on lateral inhibition. Optik 2016, 127, 5430–5438. [Google Scholar] [CrossRef]
- Ali, A.F.; Tawhid, M.A. A hybrid cuckoo search algorithm with Nelder Mead method for solving global optimization problems. SpringerPlus 2016, 5, 473. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Parkhi, O.M.; Vedaldi, A.; Zisserman, A.; Jawahar, C.V. Cats and dogs. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3498–3505. [Google Scholar]
- Liu, X.; Jiang, W.; Xie, J.; Jia, Y. An image template matching method using particle swarm optimization. In Proceedings of the 2009 Asia-Pacific Conference on Computational Intelligence and Industrial Applications (PACIIA), Wuhan, China, 28–29 November 2009; Volume 1, pp. 83–86. [Google Scholar]
- Dong, N.; Wu, C.-H.; Ip, W.-H.; Chen, Z.-Q.; Chan, C.-Y.; Yung, K.-L. An improved species based genetic algorithm and its application in multiple template matching for embroidered pattern inspection. Expert Syst. Appl. 2011, 38, 15172–15182. [Google Scholar] [CrossRef]
- Wang, S.; Lewandowski, M.; Annesley, J.; Orwell, J. Re-identification of pedestrians with variable occlusion and scale. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 1876–1882. [Google Scholar]
- Yang, S.; Luo, P.; Loy, C.C.; Tang, X. WIDER FACE: A Face Detection Benchmark. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 5525–5533. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | F1 | F2 | F3 | F4 | |
|---|---|---|---|---|---|
| Theoretical Optimal Value | 0.0 | −1.0316 | −39.9450 | 0.0 | |
| Rao-1 | Average time | 6.9750 × 10−6 | 8.8250 × 10−6 | 0.0032 | 0.0033 |
| Actual optimal | 0.0610 | −0.1943 | −39.8498 | 0.0003 | |
| PSO | Average time | 0.2421 | 0.2767 | 0.3727 | 0.2229 |
| Actual optimal | 0.0048 | 57.6269 | −39.0897 | 2.6623 | |
| GA | Average time | 1.2741 | 1.2757 | 1.2739 | 1.2990 |
| Actual optimal | 0.0024 | −0.9549 | −39.4269 | 0.0032 | |
| Rao-NM | Average time | 4.1650 × 10−5 | 3.7300 × 10−5 | 0.0032 | 0.0033 |
| Actual optimal | 0.0025 | −1.0316 | −39.8500 | 5.2560 × 10−6 |
| Population Size | No. of Iterations | R | Time (s) |
|---|---|---|---|
| 50 | 50 | 77.71% | 71.42 |
| 50 | 100 | 80.70% | 140.23 |
| 50 | 200 | 84.51% | 277.56 |
| 100 | 50 | 85.32% | 138.61 |
| 100 | 100 | 89.13% | 274.53 |
| 100 | 200 | 87.77% | 546.94 |
| 200 | 50 | 88.58% | 273.82 |
| 200 | 100 | 91.84% | 544.45 |
| 200 | 200 | 95.10% | 1085.16 |
| Population Size | No. of Iterations | R | Time (s) |
|---|---|---|---|
| 50 | 50 | 24.45% | 99.38 |
| 50 | 100 | 29.89% | 196.78 |
| 50 | 200 | 41.57% | 371.76 |
| 100 | 50 | 32.06% | 197.40 |
| 100 | 100 | 48.36% | 311.62 |
| 100 | 200 | 61.68% | 622.31 |
| 200 | 50 | 52.44% | 372.62 |
| 200 | 100 | 66.03% | 624.34 |
| 200 | 200 | 77.44% | 1194.61 |
| Population Size | No. of Iterations | R | Time (s) |
|---|---|---|---|
| 50 | 50 | 15.48% | 196.89 |
| 50 | 100 | 34.51% | 394.18 |
| 50 | 200 | 58.96% | 776.82 |
| 100 | 50 | 35.05% | 399.27 |
| 100 | 100 | 66.03% | 792.42 |
| 100 | 200 | 82.06% | 1567.83 |
| 200 | 50 | 67.39% | 798.36 |
| 200 | 100 | 88.31% | 1570.10 |
| 200 | 200 | 94.29% | 2951.44 |
| Model | R (%) | Time (s) |
|---|---|---|
| PSO | 49.76 ± 0.84 | 2616.38 ± 9.29 |
| GA | 70.17 ± 0.82 | 4345.63 ± 151.69 |
| Rao-1 | 54.17 ± 0.59 | 1666.08 ± 25.15 |
| Proposed | 88.94 ± 0.64 | 1807.25 ± 30.69 |
| Model | R (%) | Time (s) |
|---|---|---|
| PSO | 16.91 ± 3.34 | 97.067 ± 0.61 |
| GA | 48.19 ± 3.54 | 151.736 ± 4.06 |
| Rao-1 | 19.68 ± 1.60 | 86.23 ± 0.55 |
| Proposed | 56.70 ± 3.13 | 89.11 ± 1.09 |
| Model | R (%) | Time (s) |
|---|---|---|
| PSO | 15.2 ± 2.03 | 126.533 ± 1.51 |
| GA | 44.3 ± 4.59 | 189.719 ± 2.26 |
| Rao-1 | 19.5 ± 1.50 | 116.022 ± 0.54 |
| Proposed | 67.1 ± 3.95 | 120.916 ± 0.67 |
| Image 1 | Image 2 | Image 3 | ||
|---|---|---|---|---|
| PSO | Average time | 5.64 | 24.44 | 27.86 |
| Accuracy | 34% | 28% | 50% | |
| GA | Average time | 9.33 | 14.75 | 24.59 |
| Accuracy | 82% | 84% | 50% | |
| Rao-1 | Average time | 4.27 | 13.86 | 11.72 |
| Accuracy | 34% | 2% | 52% | |
| Rao-NM | Average time | 4.28 | 13.87 | 11.73 |
| Accuracy | 96% | 86% | 86% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Wang, Z.; Wang, L.; Huang, C.; Luo, X. A Hybrid Rao-NM Algorithm for Image Template Matching. Entropy 2021, 23, 678. https://doi.org/10.3390/e23060678
Liu X, Wang Z, Wang L, Huang C, Luo X. A Hybrid Rao-NM Algorithm for Image Template Matching. Entropy. 2021; 23(6):678. https://doi.org/10.3390/e23060678
Chicago/Turabian StyleLiu, Xinran, Zhongju Wang, Long Wang, Chao Huang, and Xiong Luo. 2021. "A Hybrid Rao-NM Algorithm for Image Template Matching" Entropy 23, no. 6: 678. https://doi.org/10.3390/e23060678
APA StyleLiu, X., Wang, Z., Wang, L., Huang, C., & Luo, X. (2021). A Hybrid Rao-NM Algorithm for Image Template Matching. Entropy, 23(6), 678. https://doi.org/10.3390/e23060678