
Delay-Sensitive NOMA-HARQ for Short Packet Communications


Abstract
:1. Introduction
2. System Model and Preliminaries
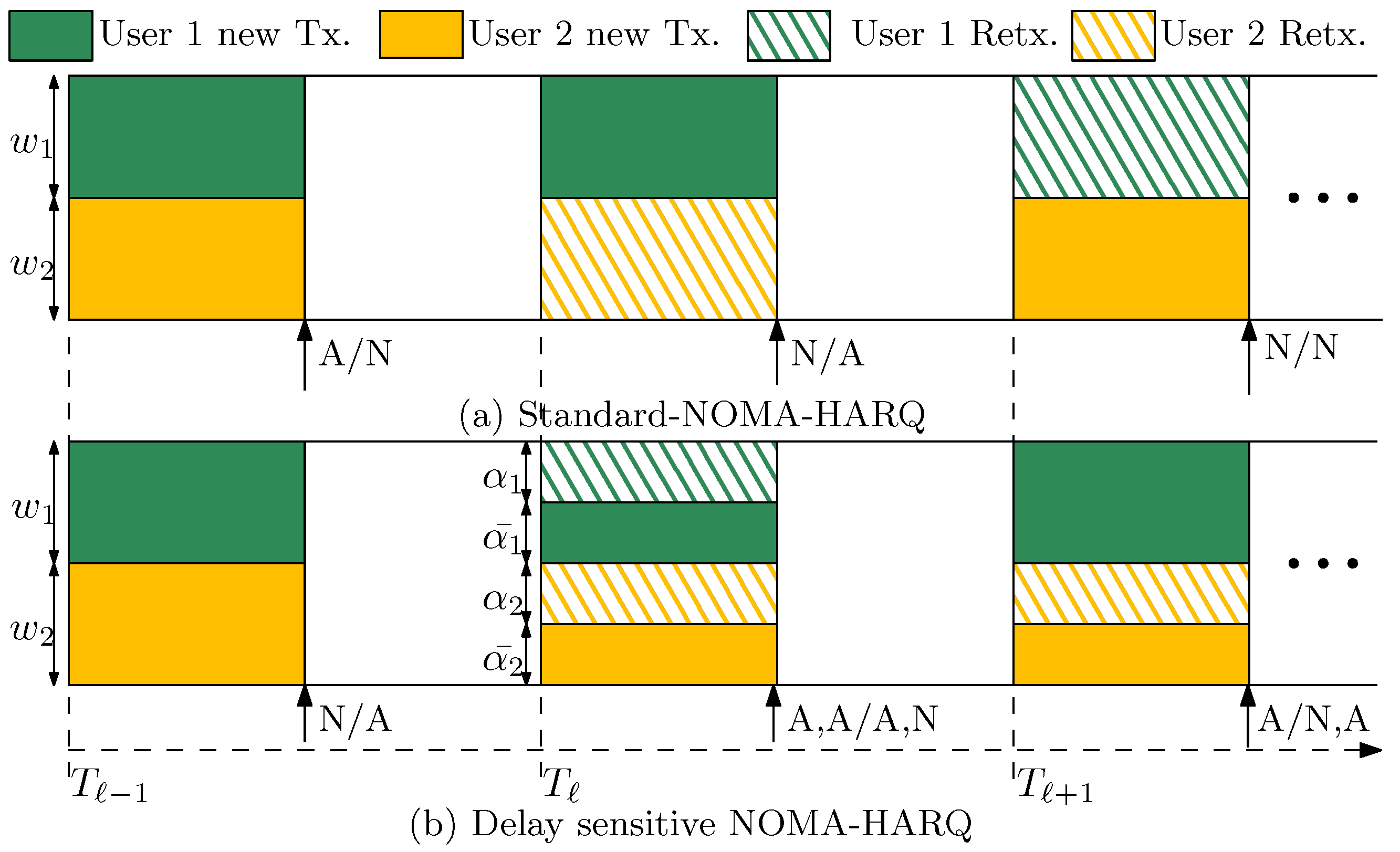
3. Delay-Sensitive NOMA-HARQ
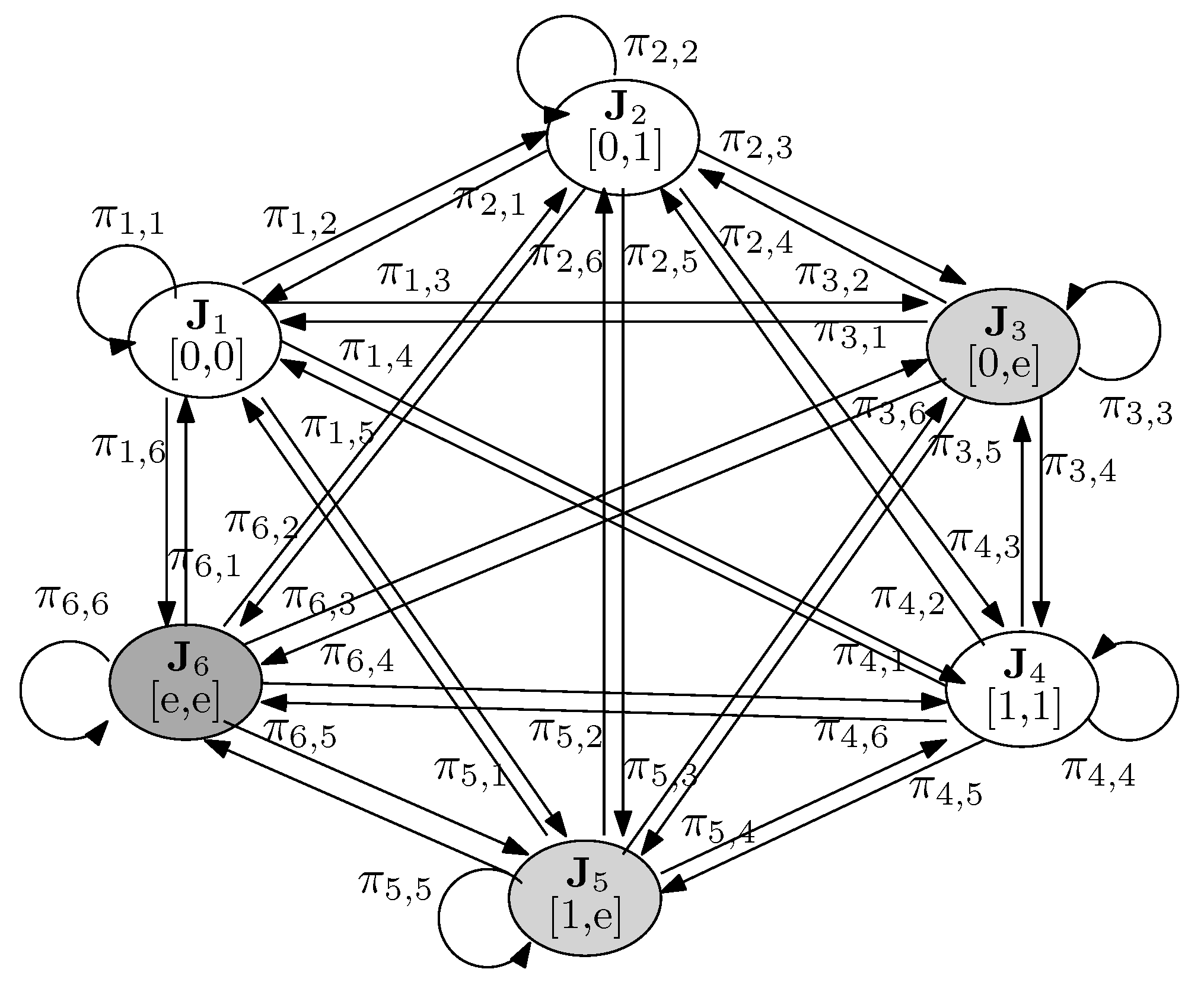
3.1. Reliability and Throughput Analysis of Two-User D-NOMA-HARQ
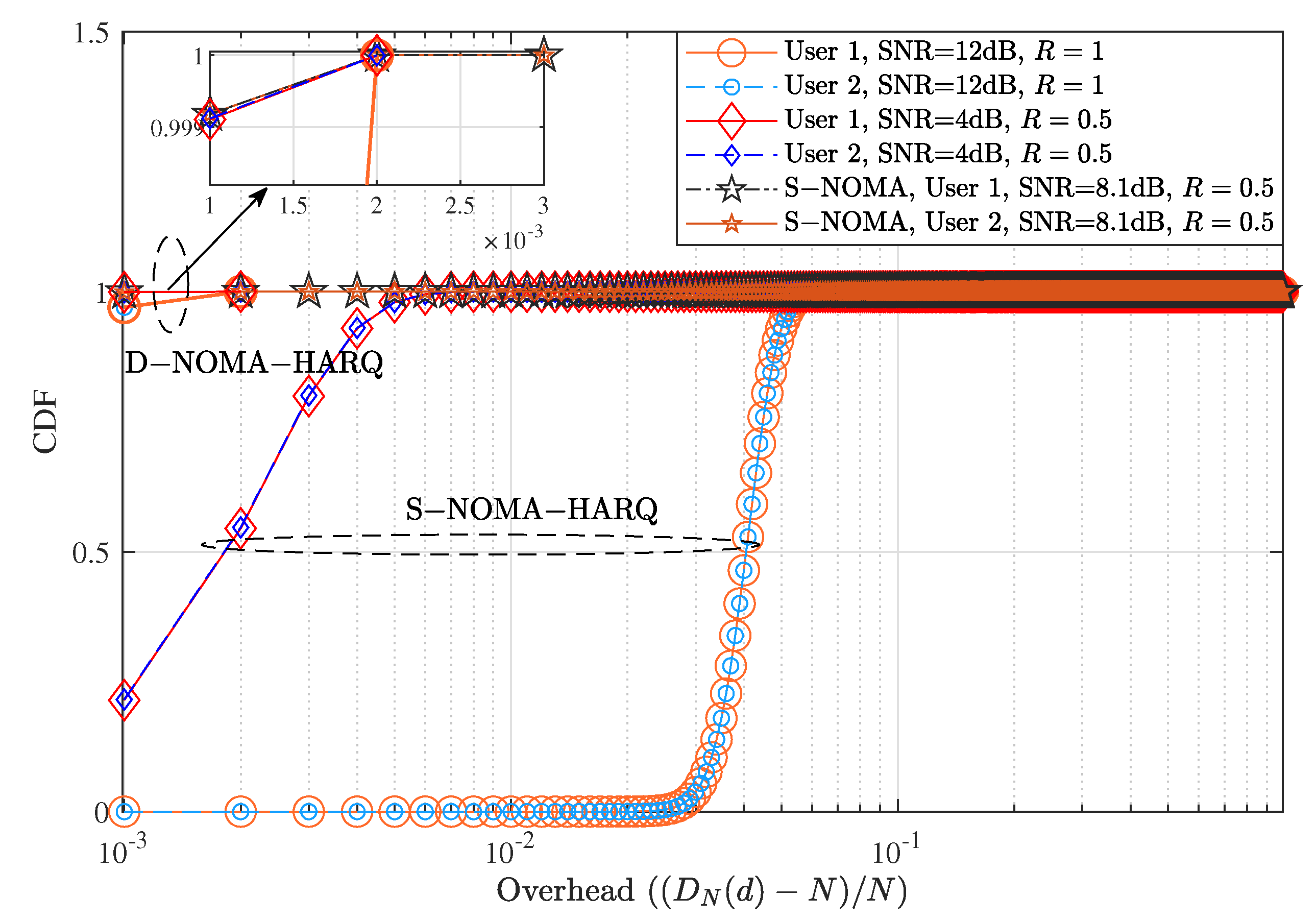
3.2. Packet Delivery Delay Profile of D-NOMA-HARQ
3.3. Packet Delivery Delay Profile of S-NOMA-HARQ
3.4. Generalized User Setup
4. Numerical Results
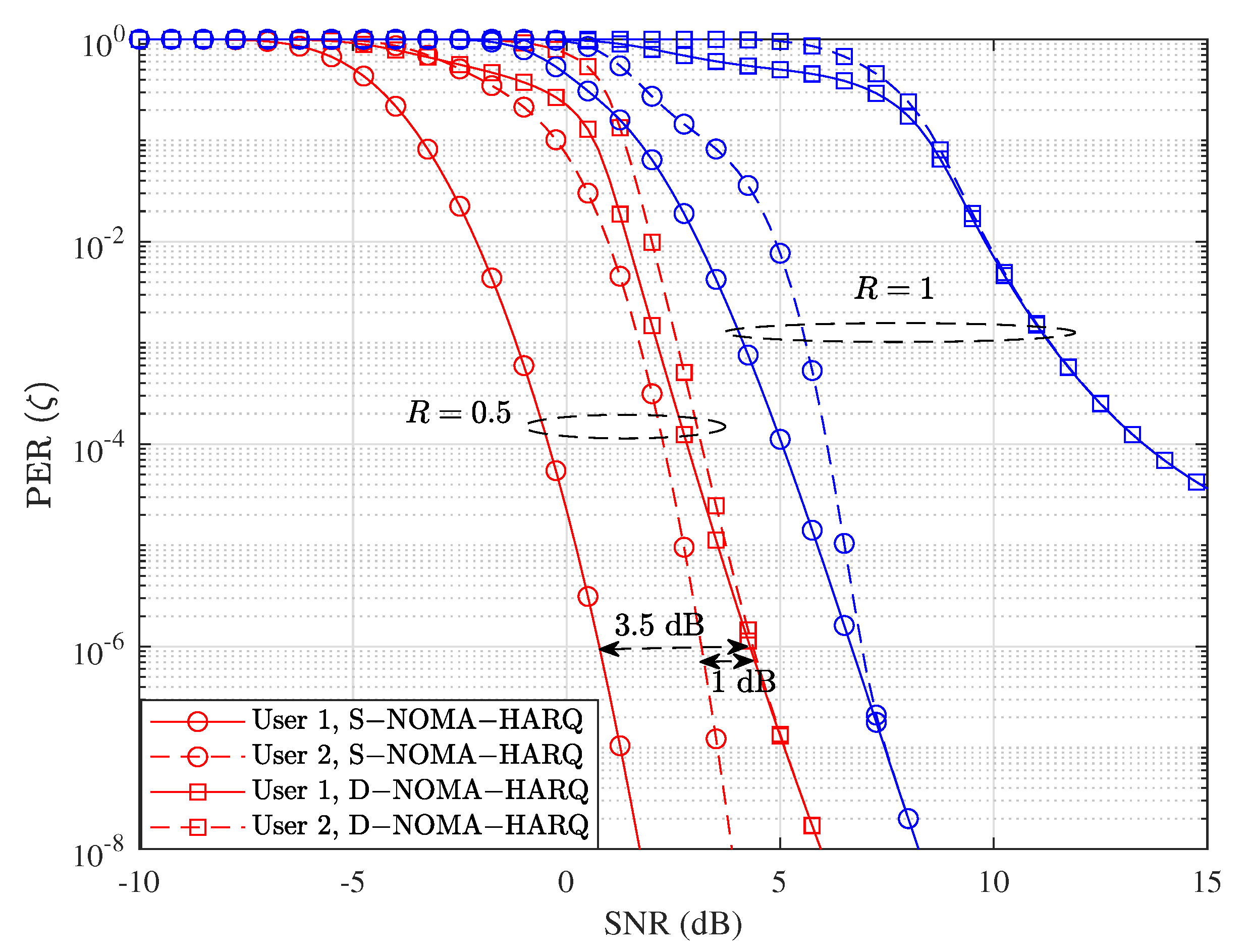
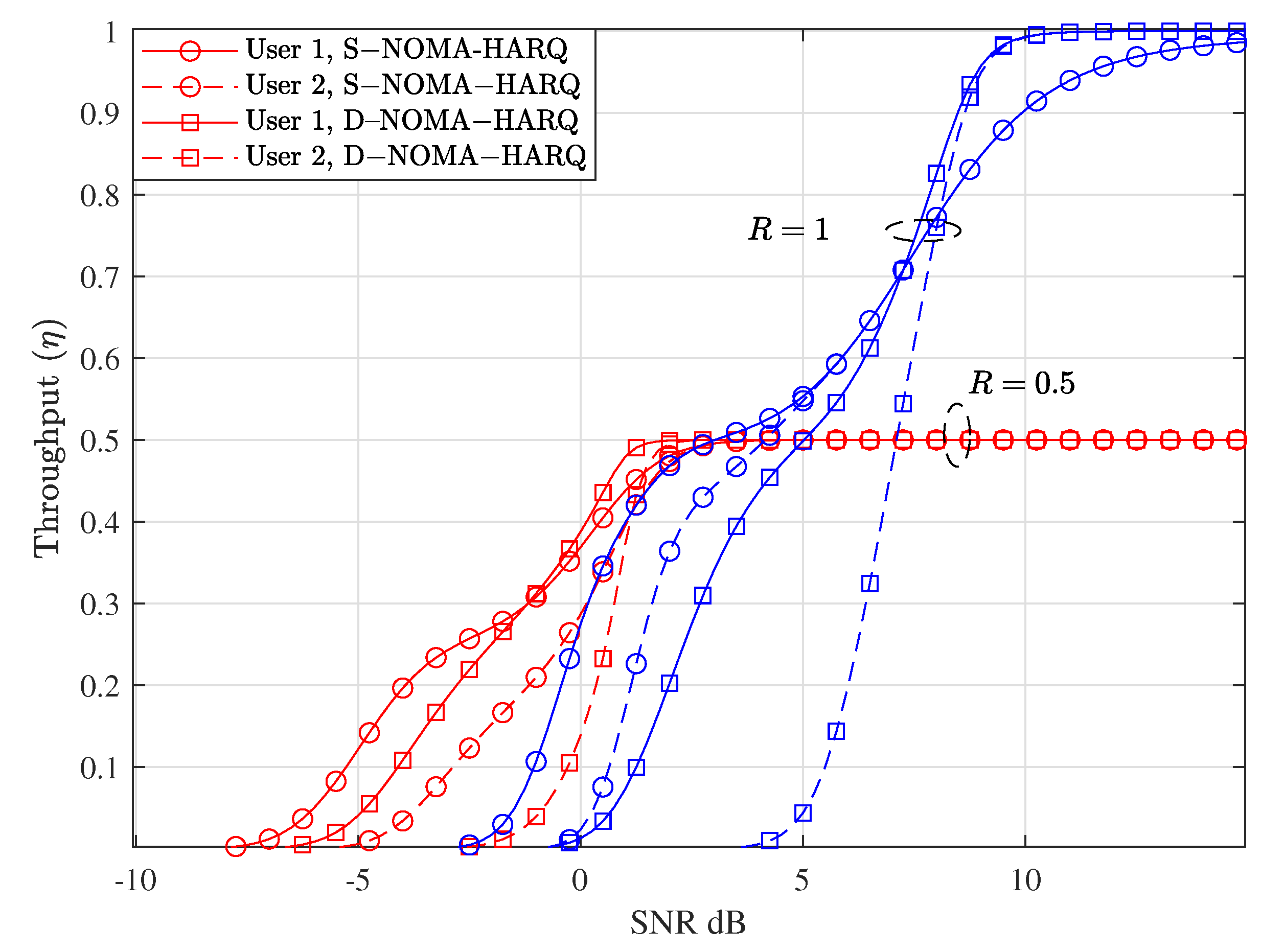
4.1. Effect of SNR and Rate on PER, Throughput, and Delay
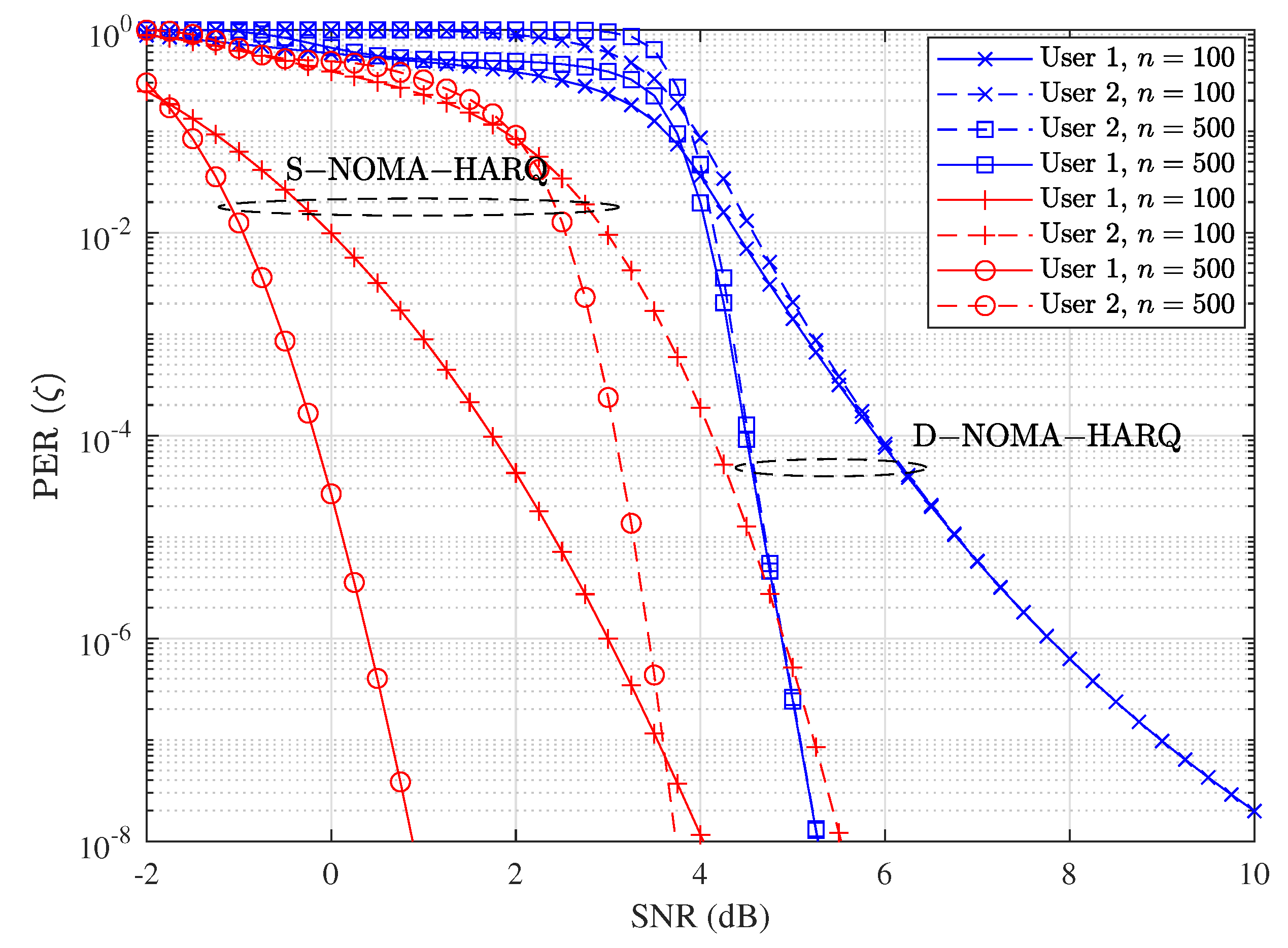
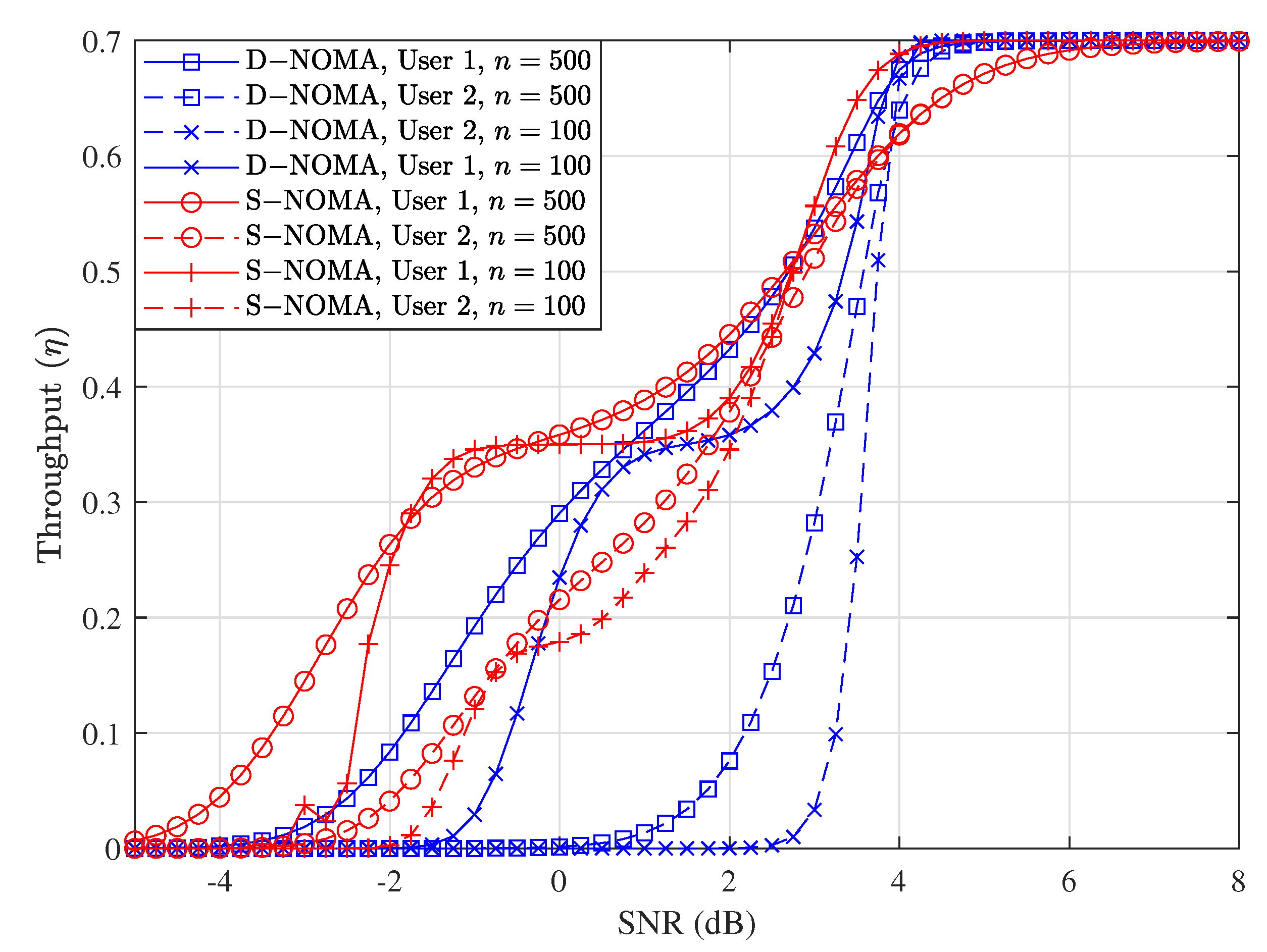
4.2. Effect of Packet Length n on PER and Throughput
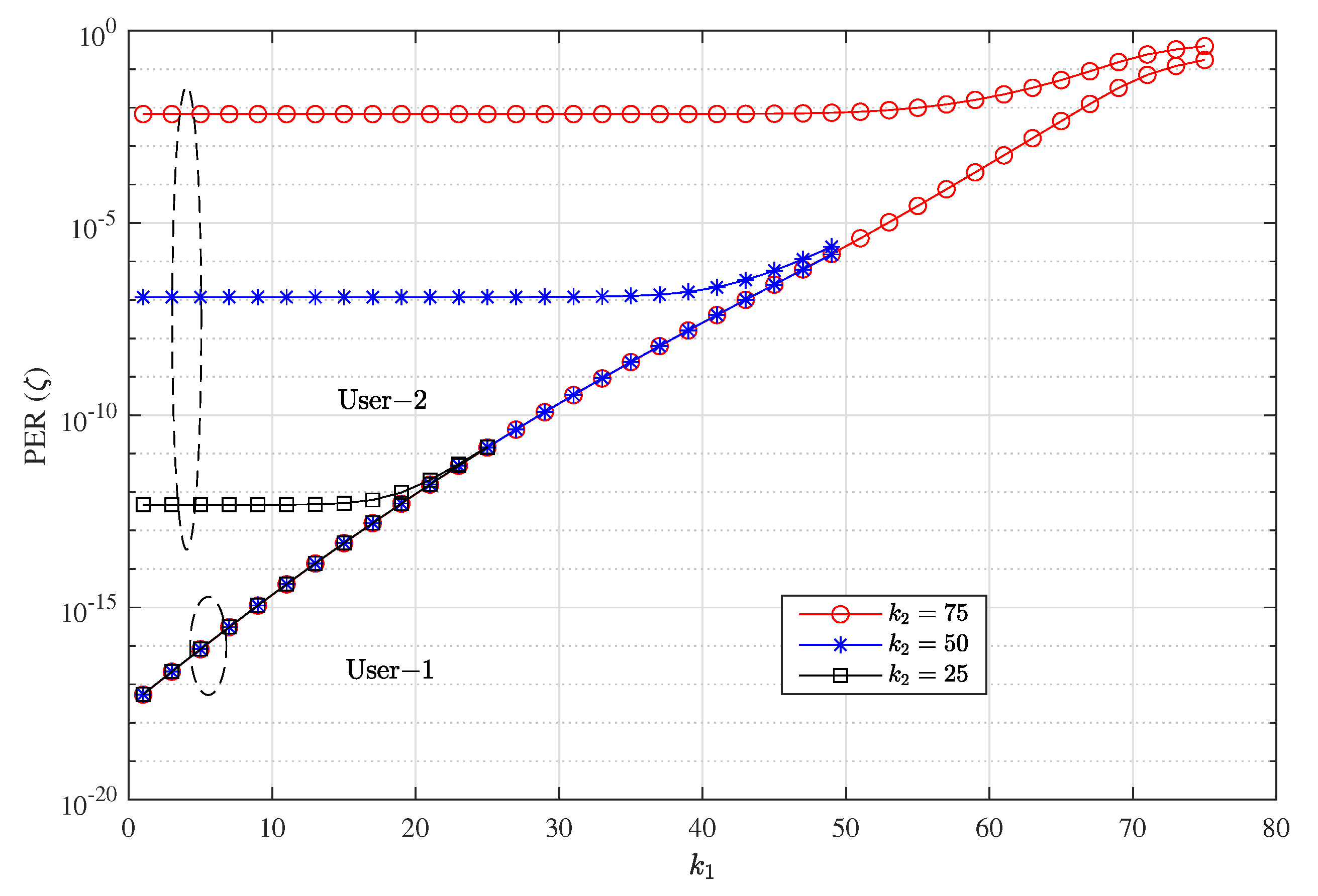
4.3. PER and Throughput Performance for different and
4.4. PER. Throughput, and Delay Performance When
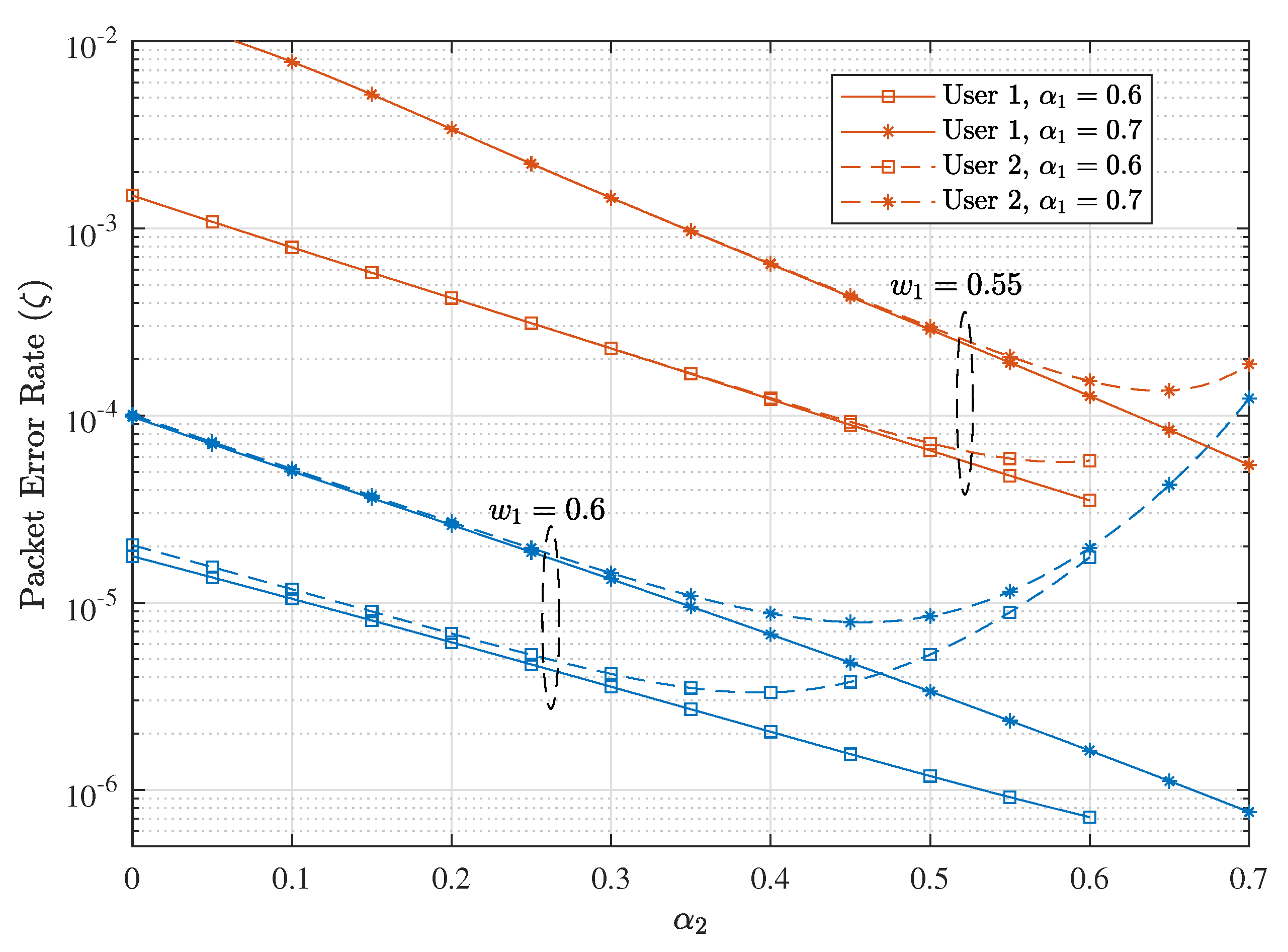
4.5. Effect of Power-Sharing Parameters, , on PER, Throughput, and Delay
4.6. Optimization of and
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rumney, M. LTE and the Evolution to 4G Wireless: Design and Measurement Challenges; Wiley Publishing: Chichester, West Sussex, UK, 2013. [Google Scholar]
- Holma, H.; Toskala, A.; Nakamura, T. 5G Technology: 3GPP New Radio; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Shafi, M.; Molisch, A.F.; Smith, P.J.; Haustein, T.; Zhu, P.; De Silva, P.; Tufvesson, F.; Benjebbour, A.; Wunder, G. 5G: A tutorial overview of standards, trials, challenges, deployment, and practice. IEEE J. Sel. Areas Commun. 2017, 35, 1201–1221. [Google Scholar] [CrossRef]
- Huang, J.; Qian, F.; Guo, Y.; Zhou, Y.; Xu, Q.; Mao, Z.M.; Sen, S.; Spatscheck, O. An in-depth study of LTE: Effect of network protocol and application behavior on performance. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 363–374. [Google Scholar] [CrossRef]
- Chen, H.; Abbas, R.; Cheng, P.; Shirvanimoghaddam, M.; Hardjawana, W.; Bao, W.; Li, Y.; Vucetic, B. Ultra-reliable low latency cellular networks: Use cases, challenges and approaches. IEEE Commun. Mag. 2018, 56, 119–125. [Google Scholar] [CrossRef] [Green Version]
- Shirvanimoghaddam, M.; Mohammadi, M.S.; Abbas, R.; Minja, A.; Yue, C.; Matuz, B.; Han, G.; Lin, Z.; Liu, W.; Li, Y.; et al. Short Block-Length Codes for Ultra-Reliable Low Latency Communications. IEEE Commun. Mag. 2019, 57, 130–137. [Google Scholar] [CrossRef] [Green Version]
- Shirvanimoghaddam, M.; Dohler, M.; Johnson, S.J. Massive non-orthogonal multiple access for cellular IoT: Potentials and limitations. IEEE Commun. Mag. 2017, 55, 55–61. [Google Scholar] [CrossRef] [Green Version]
- Durisi, G.; Koch, T.; Popovski, P. Toward massive, ultrareliable, and low-latency wireless communication with short packets. Proc. IEEE 2016, 104, 1711–1726. [Google Scholar] [CrossRef] [Green Version]
- IHS Statista. Number of Internet of Things (IoT) Connected Devices Worldwide in 2018, 2025 and 2030 (in Billions). Available online: https://www.statista.com/statistics/802690/worldwide-connected-devices-by-access-technology (accessed on 15 May 2019).
- Polyanskiy, Y.; Poor, H.V.; Verdú, S. Channel coding rate in the finite blocklength regime. IEEE Trans. Inf. Theory 2010, 56, 2307. [Google Scholar] [CrossRef]
- Nouri, P.; Alves, H.; Uusitalo, M.A.; López, O.A.; Latva-aho, M. Machine-type Wireless Communications Enablers for Beyond 5G: Enabling URLLC via diversity under hard deadlines. Comput. Netw. 2020, 174, 107227. [Google Scholar] [CrossRef]
- Makki, B.; Behravan, A.; Hashemi, M. Hybrid Automatic Repeat Request Using an Adaptive Multiple Access Scheme. U.S. Patent 10,868,641, 15 December 2020. [Google Scholar]
- Sahin, C.; Liu, L.; Perrins, E.; Ma, L. Delay-Sensitive Communications Over IR-HARQ: Modulation, Coding Latency, and Reliability. IEEE J. Sel. Areas Commun. 2019, 37, 749–764. [Google Scholar] [CrossRef]
- Devassy, R.; Durisi, G.; Ferrante, G.C.; Simeone, O.; Uysal, E. Reliable transmission of short packets through queues and noisy channels under latency and peak-age violation guarantees. IEEE J. Sel. Areas Commun. 2019, 37, 721–734. [Google Scholar] [CrossRef] [Green Version]
- Makki, B.; Svensson, T.; Caire, G.; Zorzi, M. Fast HARQ over finite blocklength codes: A technique for low-latency reliable communication. IEEE Trans. Wirel. Commun. 2018, 18, 194–209. [Google Scholar] [CrossRef] [Green Version]
- 3GPP TS 22.261 Service Requirements for the 5G Systems; Stage 1 (Release 17). Technical Report, 3rd Generation Partnership Project, Technical Specification Group Services and System Aspects. 2020. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3107 (accessed on 10 July 2021).
- Elbayoumi, M.; Kamel, M.; Hamouda, W.; Youssef, A. NOMA-assisted machine-type communications in UDN: State-of-the-art and challenges. IEEE Commun. Surv. Tutor. 2020, 22, 1276–1304. [Google Scholar] [CrossRef]
- Ding, Z.; Liu, Y.; Choi, J.; Sun, Q.; Elkashlan, M.; Chih-Lin, I.; Poor, H.V. Application of non-orthogonal multiple access in LTE and 5G networks. IEEE Commun. Mag. 2017, 55, 185–191. [Google Scholar] [CrossRef] [Green Version]
- Dai, L.; Wang, B.; Yuan, Y.; Han, S.; Chih-Lin, I.; Wang, Z. Non-orthogonal multiple access for 5G: Solutions, challenges, opportunities, and future research trends. IEEE Commun. Mag. 2015, 53, 74–81. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, Z.; Elkashlan, M.; Ding, Z.; Nallanathan, A.; Hanzo, L. Non-orthogonal multiple access for 5G and beyond. Proc. IEEE 2017, 105, 2347–2381. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Yang, L.L. Sparse or dense: A comparative study of code-domain NOMA systems. IEEE Trans. Wirel. Commun. 2021. [Google Scholar] [CrossRef]
- Ghanami, F.; Hodtani, G.A.; Vucetic, B.; Shirvanimoghaddam, M. Performance analysis and optimization of NOMA with HARQ for short packet communications in massive IoT. IEEE Internet Things J. 2020, 8, 4736–4748. [Google Scholar] [CrossRef]
- Kotaba, R.; Manchón, C.N.; Balercia, T.; Popovski, P. How URLLC can Benefit from NOMA-based Retransmissions. IEEE Trans. Wirel. Commun. 2020, 20, 1684–1699. [Google Scholar] [CrossRef]
- Maatouk, A.; Assaad, M.; Ephremides, A. Minimizing the age of information: NOMA or OMA? In Proceedings of the IEEE INFOCOM 2019—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 102–108. [Google Scholar]
- Amjad, M.; Musavian, L.; Aïssa, S. NOMA versus OMA in Finite Blocklength Regime: Link-Layer Rate Performance. IEEE Trans. Veh. Technol. 2020, 69, 16253–16257. [Google Scholar] [CrossRef]
- Shafique, T.; Zia, M.; Han, H.D.; Mahmood, H. Cross-layer Chase combining with selective retransmission, analysis, and throughput optimization for OFDM systems. IEEE Trans. Commun. 2016, 64, 2311–2325. [Google Scholar] [CrossRef] [Green Version]
- Sassioui, R.; Jabi, M.; Szczecinski, L.; Le, L.B.; Benjillali, M.; Pelletier, B. HARQ and AMC: Friends or foes? IEEE Trans. Commun. 2016, 65, 635–650. [Google Scholar] [CrossRef] [Green Version]
- Avranas, A.; Kountouris, M.; Ciblat, P. The Influence of CSI in Ultra-Reliable Low-Latency Communications with IR-HARQ. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Nadeem, F.; Shirvanimoghaddam, M.; Li, Y.; Vucetic, B. Non-orthogonal HARQ for URLLC: Design and Analysis. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Xu, Y.; Cai, D.; Fang, F.; Ding, Z.; Shen, C.; Zhu, G. HARQ-CC enabled NOMA designs with outage probability constraints. arXiv 2019, arXiv:1911.01167. [Google Scholar]
- Cai, D.; Ding, Z.; Fan, P.; Yang, Z. On the performance of NOMA with hybrid ARQ. IEEE Trans. Veh. Technol. 2018, 67, 10033–10038. [Google Scholar] [CrossRef] [Green Version]
- Cai, D.; Xu, Y.; Fang, F.; Yan, S.; Fan, P. Outage probability of noma with partial HARQ over time-correlated fading channels. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Xu, Y.; Cai, D.; Ding, Z.; Shen, C.; Zhu, G. Average power minimization for downlink NOMA transmission with partial HARQ. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–5. [Google Scholar]
- Jabbarvaziri, F.; Balasubramanya, N.M.; Lampe, L. HARQ-Based Grant-Free NOMA for mMTC Uplink. IEEE Internet Things J. 2020, 8, 8372–8386. [Google Scholar] [CrossRef]
- Chandran, R.; Pal, S.R. A Novel Retransmission Scheme for HARQ Enhancement in NOMA Based LTE systems. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–5. [Google Scholar]
- Muhammad, Z.; Mahmood, H.; Ahmed, A.; Saqib, N.A. Selective HARQ transceiver design for OFDM system. IEEE Commun. Lett. 2013, 17, 2229–2232. [Google Scholar] [CrossRef]
- Cardwell, N.; Savage, S.; Anderson, T. Modeling TCP latency. In Proceedings of the IEEE INFOCOM 2000 Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 3, pp. 1742–1751. [Google Scholar]
- Choi, J. NOMA-based random access with multichannel ALOHA. IEEE J. Sel. Areas Commun. 2017, 35, 2736–2743. [Google Scholar] [CrossRef] [Green Version]
- Zeng, M.; Yadav, A.; Dobre, O.A.; Poor, H.V. Energy-efficient joint user-RB association and power allocation for uplink hybrid NOMA-OMA. IEEE Internet Things J. 2019, 6, 5119–5131. [Google Scholar] [CrossRef] [Green Version]
- Erseghe, T. Coding in the finite-blocklength regime: Bounds based on Laplace integrals and their asymptotic approximations. IEEE Trans. Inf. Theory 2016, 62, 6854–6883. [Google Scholar] [CrossRef]
- Nadeem, F.; Shirvanimoghaddam, M.; Li, Y.; Vucetic, B. Non-orthogonal HARQ for Delay Sensitive Applications. In Proceedings of the IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CC-HARQ | IR-HARQ | ||||
|---|---|---|---|---|---|
| SNR | (, ) | , | |||
| 3 dB | , | , | |||
| 4 dB | , | , | |||
| 5 dB | , | , | |||
| 3 dB | , | , | |||
| 4 dB | , | , | |||
| 5 dB | , | , | |||
| 3 dB | , | , | |||
| 4 dB | , | , | |||
| 5 dB | , | , | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nadeem, F.; Shirvanimoghaddam, M.; Li, Y.; Vucetic, B. Delay-Sensitive NOMA-HARQ for Short Packet Communications. Entropy 2021, 23, 880. https://doi.org/10.3390/e23070880
Nadeem F, Shirvanimoghaddam M, Li Y, Vucetic B. Delay-Sensitive NOMA-HARQ for Short Packet Communications. Entropy. 2021; 23(7):880. https://doi.org/10.3390/e23070880
Chicago/Turabian StyleNadeem, Faisal, Mahyar Shirvanimoghaddam, Yonghui Li, and Branka Vucetic. 2021. "Delay-Sensitive NOMA-HARQ for Short Packet Communications" Entropy 23, no. 7: 880. https://doi.org/10.3390/e23070880
APA StyleNadeem, F., Shirvanimoghaddam, M., Li, Y., & Vucetic, B. (2021). Delay-Sensitive NOMA-HARQ for Short Packet Communications. Entropy, 23(7), 880. https://doi.org/10.3390/e23070880