1. Introduction
According to investigation [
1], cardiovascular diseases such as coronary artery stenosis, coronary heart disease and atherosclerosis have become major diseases that seriously endanger human health. The blood flow velocity in the blood vessel contains physiological and pathological information. Monitoring the changes of blood flow velocity can prevent and control such diseases in advance. Therefore, it is of great value to develop a safe and non-invasive method to monitor blood flow velocity status for the early prevention of common cardiovascular diseases.
Nowadays, common diagnostic methods for arterial stenosis include digital subtraction angiography (DSA) [
2], nuclear magnetic resonance angiography (MRA) [
3], spiral CT angiography (CTA) [
4] and ultrasonic examination [
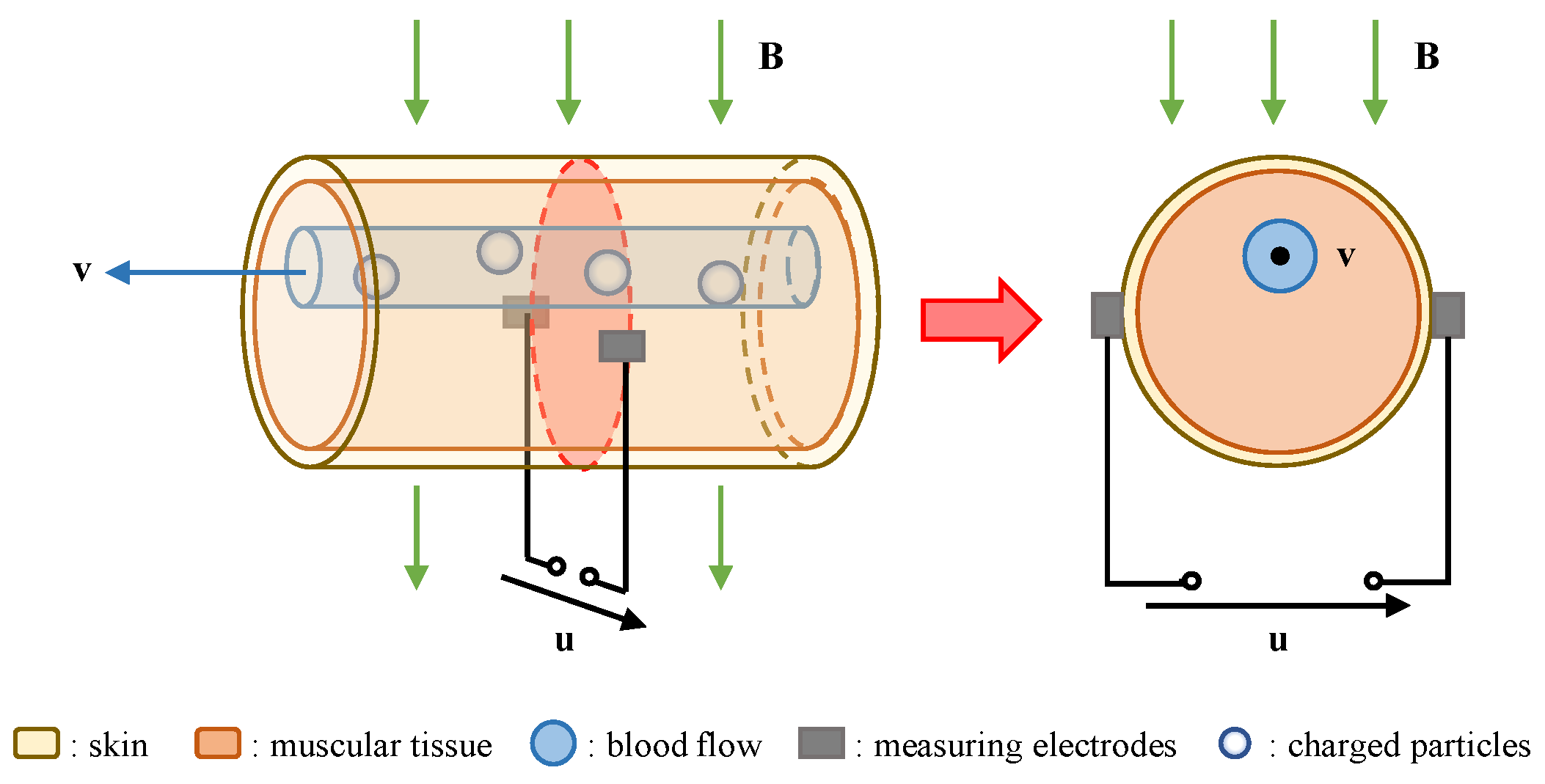
5]. These methods can detect the degree and range of arterial stenosis, but their results depend on the experience of operators, and the operation is complex. Therefore, it is urgent to find a diagnostic device and method that are convenient to use and take into account the advantages of existing technologies. It is well known that blood flow profile information at arterial stenosis can reflect the degree of stenosis, so it is feasible to predict arterial stenosis by measuring blood flow velocity. Because blood is electrically conductive, its flow velocity can be measured by the electromagnetic effect of blood flow theoretically. The fluid detection method based on the electromagnetic effect has been widely used in industrial fields such as wastewater monitoring [
6], gas–water two-phase flow measurement [
7] and groundwater flow measurement [
8]. Additionally, this method has been introduced into the blood flow detection in the medical field in recent years. Maythem [
9] proposed a blood flow measurement method based on an electromagnetic flow meter, which verified that the flow potential and blood flow satisfied an approximate linear relationship. Yang et al. [
10] studied the numerical simulation about blood flow volume reconstruction based on the weight function theory and proposed the potential application of electromagnetic sensors for predicting the arterial stenosis rate. In 2019, Marinova et al. [
11] proposed a multi-electrode electromagnetic flow detection method for non-invasive blood vessel measurement by establishing a three-dimensional (3D) electromagnetic finite element model of the leg. The development of electromagnetic measurement makes it possible to conveniently measure the blood flow velocity of a human based on electromagnetic induction and to monitor vascular lesions.
Limited by the number of measuring electrodes, the reconstruction of blood flow velocity based on electromagnetic induction is a highly nonlinear and ill-posed inverse problem. Many image reconstruction methods for nonlinear and ill-posed inverse problems have been proposed, which can be divided into traditional algorithms and deep neural networks (DNNs). The traditional algorithms mainly include the Gauss–Newton algorithm [
12], the Landweber iterative algorithm [
13] and the Tikhonov regularization algorithm [
14]. Zhang et al. [
15] proposed a combination of algebra reconstruction technique (ART) and total variation (TV) for the image reconstruction of diffuse correlation imaging (DCT). Sun et al. [
16] used an improved Tikhonov algorithm for lung cancer monitoring in electrical impedance tomography (EIT). Although these methods are simple and fast, they are easy to obtain through locally optimal solutions. This leads to the relatively low image accuracy reconstructed by traditional algorithms, and it is not enough to meet the requirements of practical medical applications.
Besides, DNNs have gained wide popularity in the problem of ill-posed medical image reconstruction. The application of DNNs in image reconstruction is divided into two parts: some methods combine other reconstruction algorithms with DNNs, and the DNNs are as a post-processing method to improve the image quality. Martin et al. [
17] proposed a reconstruction method for 3D EIT. It acquired a linear distribution from the voltage signal through the Gauss–Newton (GN) algorithm and used an artificial neural network (ANN) as a post-processing method to correct the conductivity distribution of the measured area. The phantom and lung data in the experimental results showed that this method can reduce the influence of noise in the measured data and produced high-quality images from a noisy environment. Hamilton et al. [
18] coupled the D-bar reconstruction method with a convolution neural network (CNN). Their results showed that CNN can effectively enhance the resulting image of EIT as a method of post-processing D-BAR images. Ren et al. [
19] designed a two-stage deep learning method for robust shape reconstruction with EIT. In this method, the rough reconstruction results were obtained by preprocessing the voltage measurement signal with the punishment of regularization term. The results of rough reconstruction and the shape of the lung domain are then input to the convolutional neural network (CNN) for post-processing. Their results showed that this method can reconstruct the lung shape accurately and had good robustness. Some others consider DNNs as a way to reconstruct images directly from measured signals. Chen et al. [
20] described a new magnetic induction tomography (MIT) reconstruction algorithm with a stacked auto-encoder (SAE) neural network, which can map non-linearly between input and output. The defects of complex calculation and serious artifacts in traditional algorithms was solved. Li et al. [
21] designed a neural network model combining SAE and the logistic regression (LR) to ensure reliable image generation in EIT. The model determined the relationship between the voltage measurement and the internal conductivity distribution. The results showed that its imaging effect is good and it has some anti-noise ability. Jaejun Yoo et al. [
22] proposed a novel deep learning approach that learns non-linear photon scattering physics and obtained an accurate 3D distribution of optical anomalies. According to the features of voltage data collected in EIT, Li et al. [
23] presented a one-dimensional convolutional neural network (1D-CNN) to solve the inverse problem of image reconstruction. Their results demonstrated that the proposed method had better imaging results, especially for the reconstruction of complex geometric distribution. Chen et al. [
24] proposed a MITNet technique to solve the MIT reconstruction imaging problem. This method is constructed by a generative adversarial network (GAN) based on CNN. They verified the feasibility of the proposed method on real data sets, and the experimental results showed that the performance of their method is better than that of the existing methods. Wang et al. [
25] proposed a radial basis function neural network based on hybrid particle swarm optimization algorithm to reconstruct images in EIT, which improved the imaging accuracy and the robustness to noise. Therefore, DNNs may become an effective method for blood flow velocity inversion based on electromagnetic induction.
In view of the shortcomings of existing reconstruction algorithms, this paper proposed a novel method for arterial blood flow profile reconstruction based on DNN, integrated CAE and CNN. The CAE takes the weight matrix as input and extracts its low-dimensional features to provide more details in the potential difference reconstruction information. The features of the weight matrix are used to process the reconstructed information from the voltage domain to the velocity domain. In this process, the features of blood velocity distribution are acquired, which are the result of an increase in the dimension of reconstruction information data. The blood velocity distribution features are input into the CNN network and mapped into the blood flow velocity for reconstructing the arterial blood flow profile image. The proposed method was trained and tested by the data obtained from a 2D model of the carotid artery with various stenoses. Correlation coefficient (CC) and root mean square error (RMSE) were adopted as evaluation indexes. Additionally, the effectiveness and robustness of the proposed model are verified. The experiment results show that the method can solve ill-posed image reconstruction for blood flow velocity distribution. Compared to the traditional algorithms and neural network methods, the results demonstrate that the performance of the proposed method is superior to existing methods and shows that it is competitive.
The contributions of this work can be elaborated as follows:
- (1)
We proposed an arterial blood flow profile reconstruction method based on DNN, with CAE and CNN.
- (2)
To improve the accuracy of reconstruction image, a data dimension increase strategy is used by CAE and data domain transformation.
- (3)
A 2D model of the carotid artery with various stenoses was established in COMSOL, and data set was obtained from this model for improving the generalization ability of the proposed method.
The rest of this paper is organized as follows:
Section 2 presents the principle of blood velocity reconstruction based on electromagnetic induction and the details of the proposed method;
Section 3 describes the generation of data set and the experiment;
Section 4 presents the experimental results;
Section 5 analyzes and discusses the experimental results;
Section 6 summarizes the paper and draws our conclusions.
3. Experiments
3.1. Data Set
A reliable and sufficient data set is the necessary condition for training and optimizing the deep learning network to test the effectiveness of the proposed method. Because it is difficult to obtain true blood flow velocity distributions in arterial profile as the data set, a 2D carotid artery stenosis model with different rates of stenosis is generated from the fascia layer cross-section of the human neck [
30]. The course of carotid artery stenosis model establishment is described in detail in
Section 3.1.1. The data set acquisition process is described in
Section 3.1.2.
3.1.1. Model Establishment
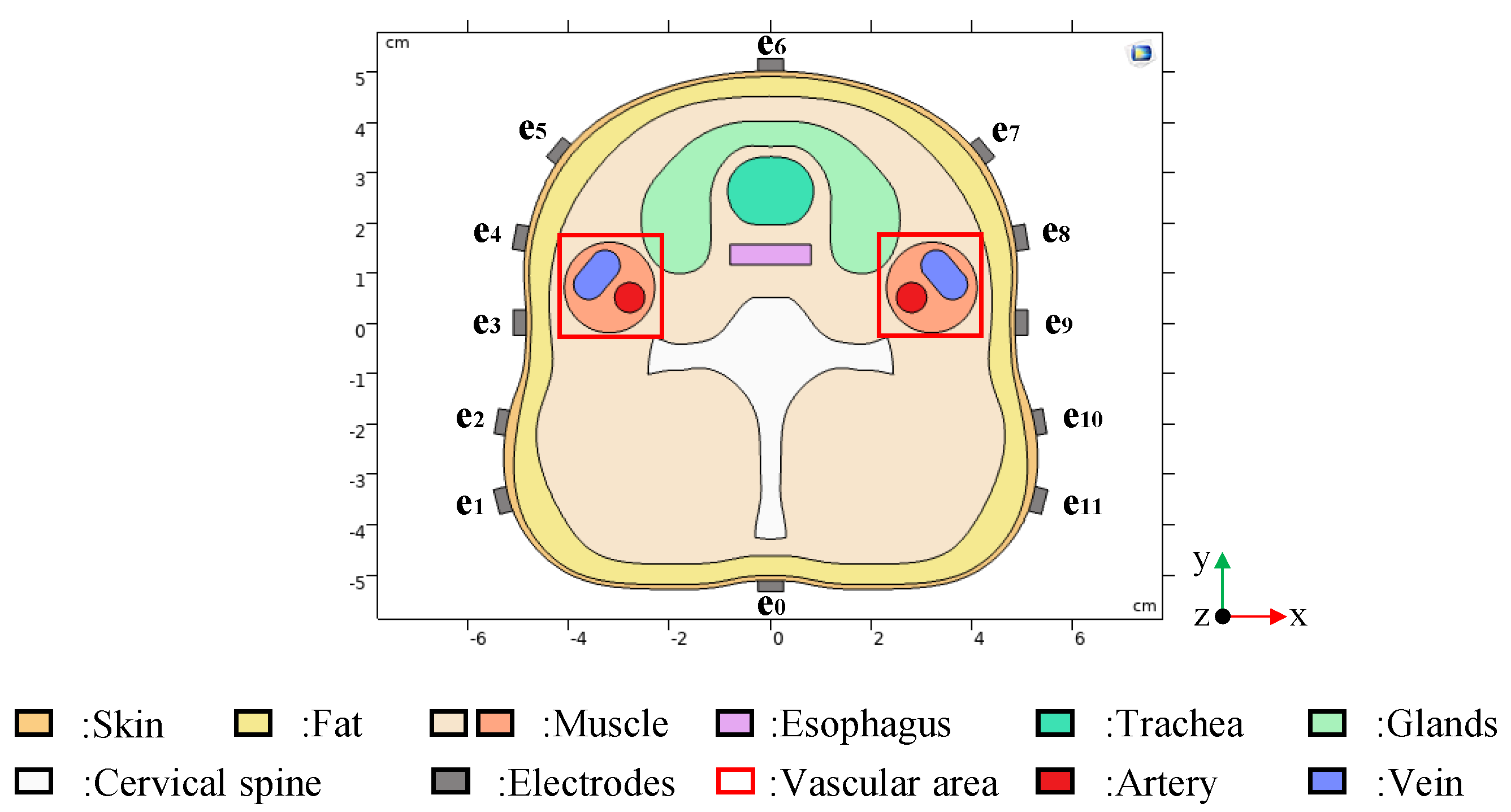
The fascia layer cross-section of the human neck shows the basic components of the carotid internal, including skin, fat, muscle, cervical spine, esophagus, glands, trachea, artery and vein. The edge coordinates of each biological tissue in the fascia layer cross-section are extracted. According to these coordinates, the 2D carotid artery stenosis model, as shown in
Figure 6, was constructed in COMSOL Multiphysics by interpolation curve technology. The internal structure of the human neck is basically restored in the model. The model includes electrodes in addition to the structure of the human neck. A total of 12 electrodes (e0, e1 … e11) are used to detect potential differences in the surface of the skin. e0 is the grounded reference electrode and (e1 … e11) are the measuring electrodes.
The real physical parameters of each organization were set after the geometric modeling was completed. Referring to the relevant biomedical literature [
31,
32], the typical conductivity values, as shown in
Table 4, are assigned to each tissue.
Moreover, the normal carotid artery adopts the periodic pulsating blood flow velocity according to the real physiological value [
33]. The variation cycle of arterial blood flow velocity is generally about 0.8 s, and it is affected by the cardiac cycle. When the artery stenosis occurs, the blood velocity in the vessel will change accordingly [
34,
35]. So, the relationship between arterial stenosis rate and blood flow velocity needs to be analyzed.
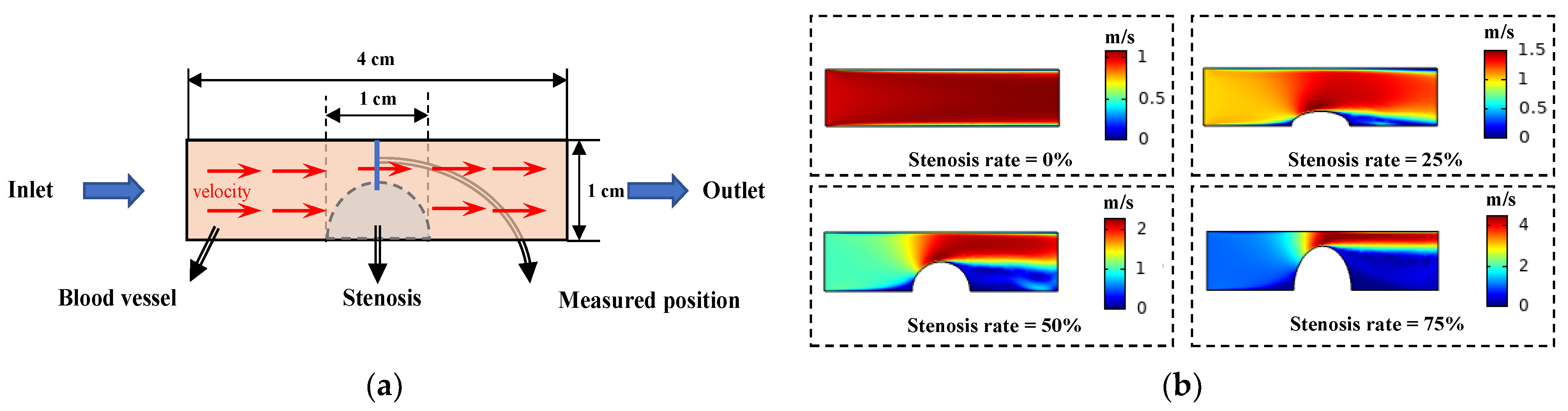
A simple blood vessel model is constructed in COMSOL, as shown in
Figure 7a. The left boundary of the model is the flow velocity inlet, and the right boundary is the flow velocity outlet. The inlet velocity was set to 1 m/s. The distributions of the intravascular flow velocity at different stenosis rates are as shown in
Figure 7b when the stenosis degree of the model vessel is changed.
During this process, the levels of blood flow velocity at the stenosis corresponding to different stenosis rates were obtained. Since the inlet flow velocity is set as a unit flow velocity, these velocity values can be regarded as the blood flow velocity variation coefficient of the stenosis at different stenosis rates. The pulsating blood flow velocity multiplied by the coefficient is the arterial blood flow velocity in the model. Additionally, the arterial blood flow is set to flow in the positive direction of the axis.
The venous blood velocity is relatively slow and stable. It was set at an average of 0.08 m/s. Additionally, the vein flows in the opposite direction to the artery.
3.1.2. Data Set Generation
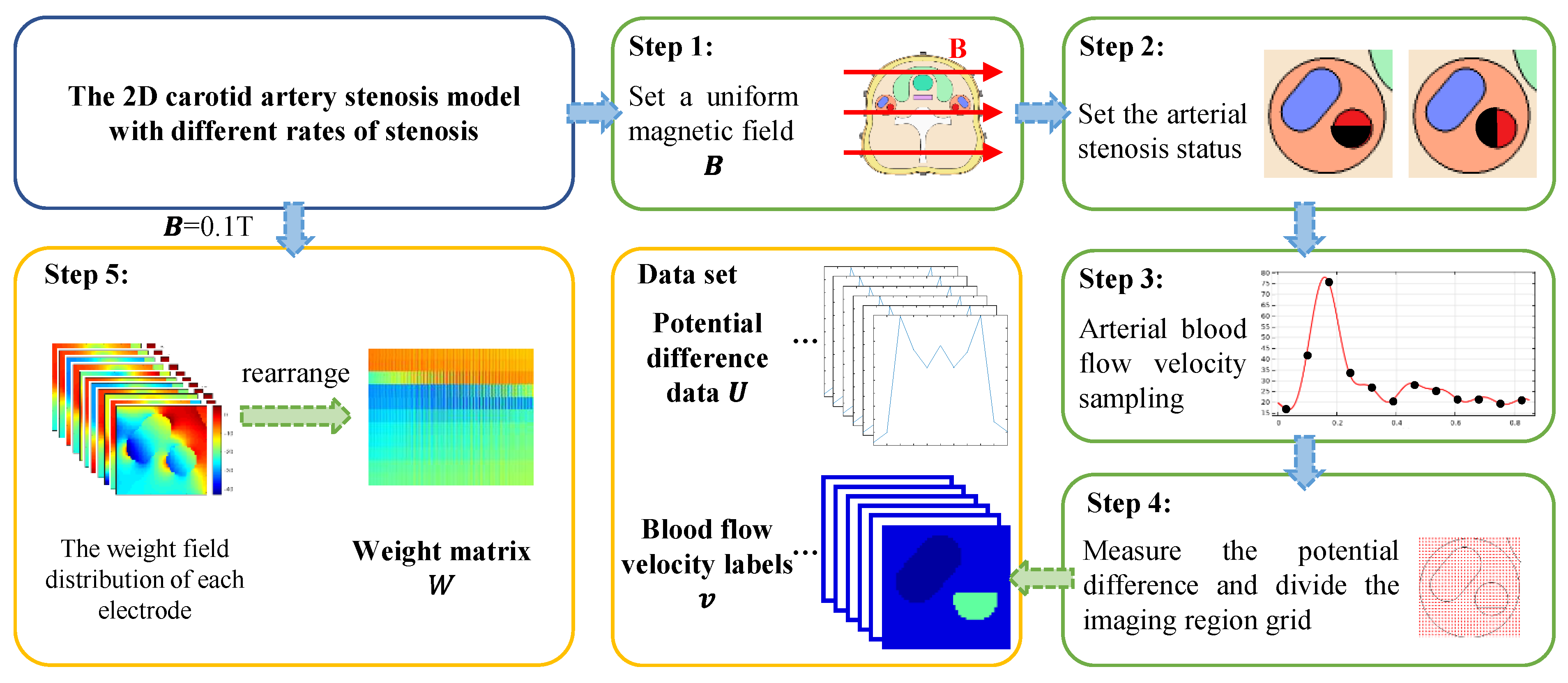
The data set for the training and testing network is generated from the carotid artery stenosis model. The generation process of the data set is shown in
Figure 8.
Step 1: The model was placed in an external excitation magnetic field, which was set as a uniform magnetic field in the positive direction of the x axis. The field intensity of the uniform magnetic field was set to change from 0.02 to 0.1 T, and the change step was 0.02 T.
Step 2: In each external magnetic excitation environment, the arteriostenosis is simulated by removing a portion of the artery, and the blood flow velocity of the stenosis portion is set to 0 m/s. The stenosis portion occupies 0% (no stenosis) ~90% of the entire artery region. The stenosis rate varies at 10% intervals starting at 0%. Additionally, the stenosis region is expanded along the positive axis and negative axis, separately.
Step 3: Under the condition of uniform magnetic field intensity and arterial stenosis rate changing, the arterial blood flow velocity of each case at a specified moment in a pulsation period is set. We take one pulsation period of blood flow velocity fluctuation as 0.85 s. The blood flow velocity is sampled every 0.01 s and the current sampling velocity is assigned to the arterial blood flow. So, the distribution of blood flow velocity corresponding to a different magnetic environment and degree of arterial stenosis is determined.
Step 4: The established model and the velocity distribution are combined to generate the voltage data set. The reference electrode e0 is grounded and the boundary voltage is extracted through the remaining 11 measuring electrodes e1~e11. Blood velocity labels are generated by dividing the measured area into reconstruction units. For the carotid artery stenosis model, the blood flow area accounts for less than 10% of the entire neck cross-section area. The local imaging method is adopted in this paper to reduce unnecessary computation. According to the established model, the positions of the artery and vein are determined, and a rectangular area containing these blood vessels is delimited as the vascular area. The vascular area with arterial stenosis is divided into several grids and the number of reconstruction units of blood flow velocity distribution was 2601. The velocity values of these units are the blood velocity labels. From Step 4, 8170 groups of the voltage data set and velocity labels generated by carotid artery models are acquired. Each sample incorporates a voltage value column vector and a blood flow label column vector.
Step 5: The weight matrix is calculated from a standard carotid artery stenosis model without arteriostenosis, in which the uniform magnetic field strength is 0.1 T. The measuring electrodes are energized in turn, and the weight field distribution of each electrode is calculated, respectively. Additionally, they were rearranged into a weight matrix with a shape of , as per the corresponding relationship between different electrodes and different reconstruction units.
3.2. Network Training
The carotid artery stenosis data set is applied for CAE-CNN network training. The reconstruction process of blood flow velocity distribution based on CAE-CNN is as follows:
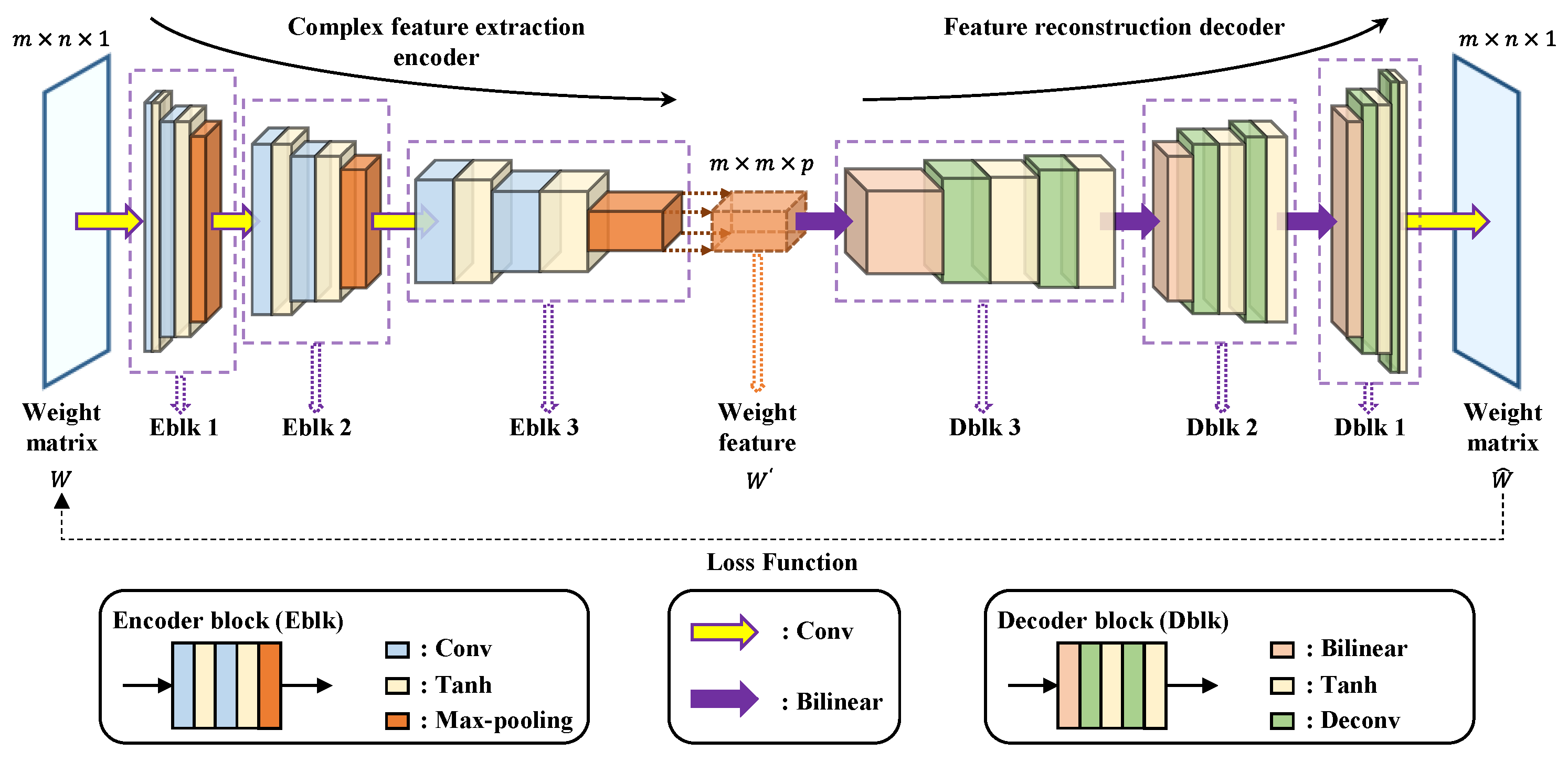
Firstly, the weight matrix is trained by CAE. The weight matrix with the shape of is standardized and then input to the unsupervised network CAE for training. The number of training iterations is 3000, and the learning rate is set as 0.0001. The reconstruction of the weight matrix is compared to the input. The MAE loss function is calculated to quantify the reconstruction error. The error is propagated backwards through the network using the ADAM algorithm to update all the weights involved in the network. When the network training is finished, the weight matrix is compressed by CAE into a weight feature matrix with the shape of . Additionally, includes 60 sub-feature matrices s.
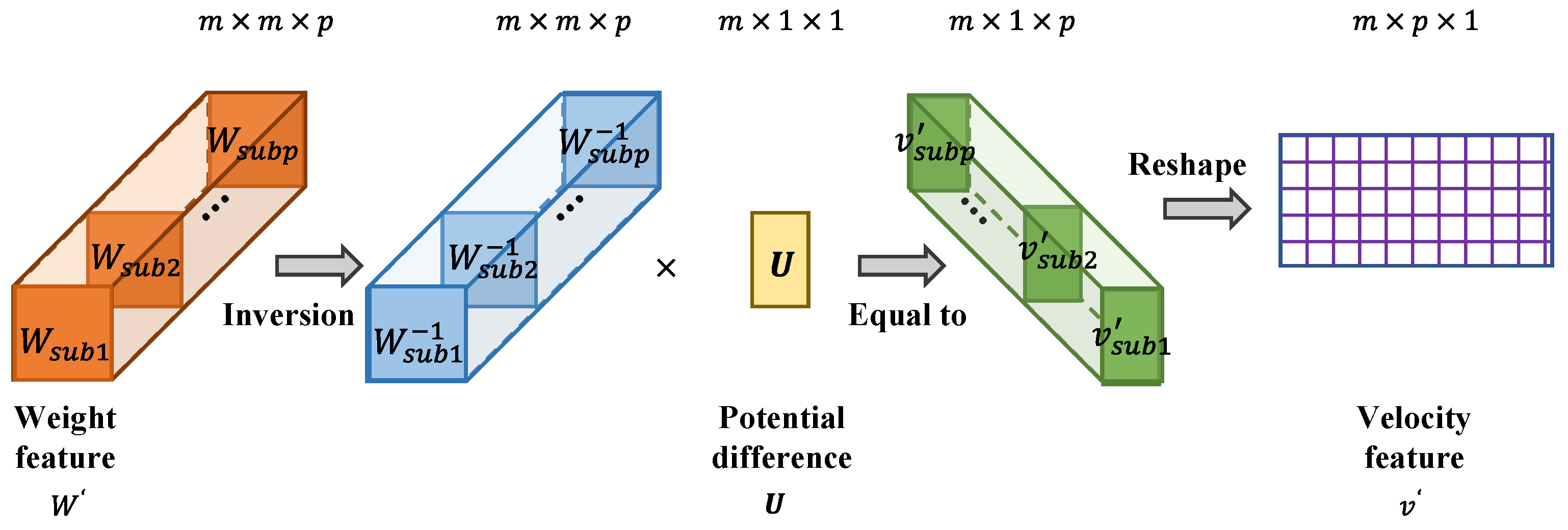
Then, the voltage data are mapped onto the velocity domain. The s get through the CAE network, and the voltage value column vector of a sample is calculated according to Formula (13), and 60 velocity sub-features s with the shape of are obtained. These s are reshaped into an feature matrix of blood velocity distribution. Additionally, the voltage data of each sample are processed in the same way.
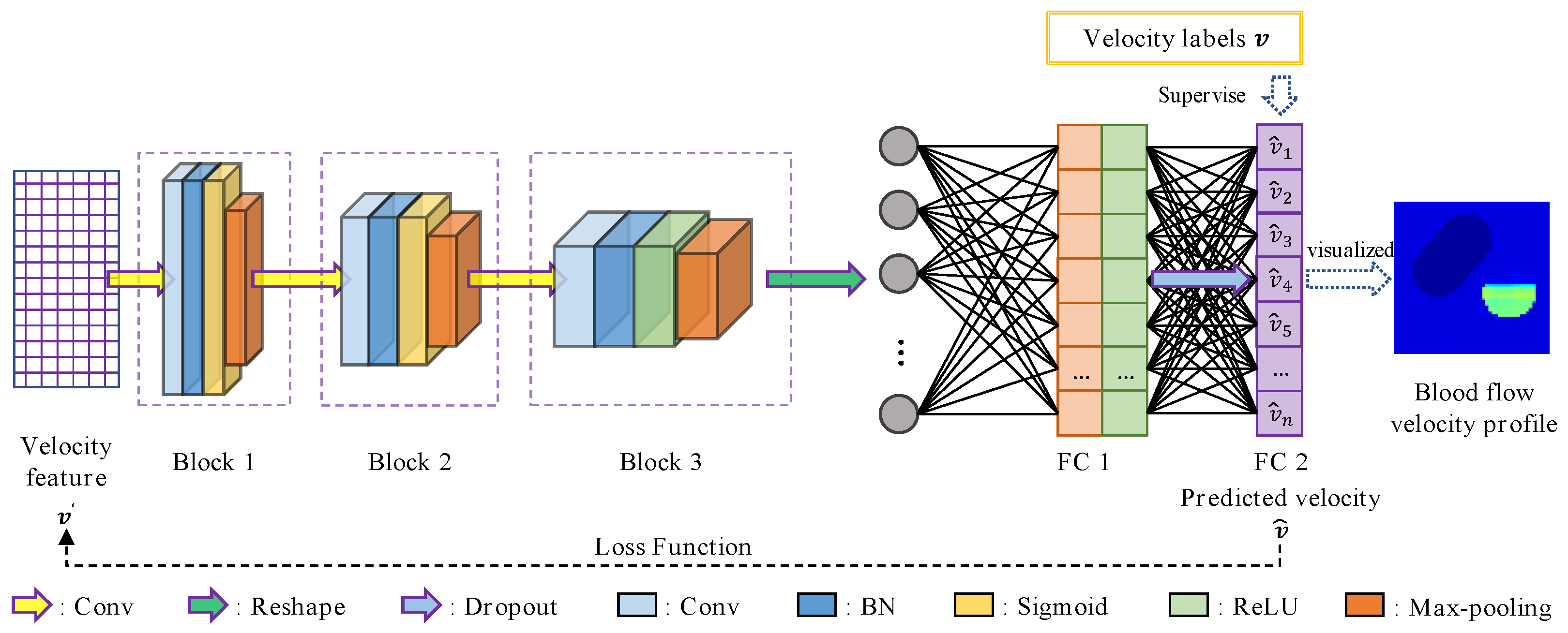
Finally, the blood flow velocity is reconstructed by CNN. The 6536 groups of samples are randomly selected for training, and the remaining 1634 groups of samples are used as the test data. The training set of blood flow velocity feature is normalized and then input into CNN. The blood flow label column vector is used as labels for the supervised learning of the network. Additionally, the learning rate is set to 0.00001, the batch-size is 817 and the number of iterations is 1500. The predicted velocity values of 2601 independent subdivision units are output by CNN. After the network training, the imaging quality is tested with randomly assigned test sets, and the reconstructed velocity distribution is calculated and visualized.
A PC equipped with an Inter(R) Core(TM) i5-6200U CPU @ 2.30GHz and a 64-bit system type with 8 GB of memory is used for the implementation of the proposed method. The operating system of the computer is 64-bit Win10. The algorithmic programming, training and testing of CAE and CNN is implemented under Python 3.5 with TensorFlow 1.10.0. The calculation of data domain transformation and results visualization are carried out in MATLAB R2019a. The whole process of the proposed method for training, calculating and predicting results took a total of 12.7 h.
4. Results
In order to evaluate the reconstruction ability of the proposed method, three image reconstruction methods, namely, the Tikhonov regularization algorithm, the BP neural network and the CNN network, are compared. They reconstruct the distribution of blood flow velocity directly from the potential difference. For the purpose of highlighting the role of the CAE, the network architecture and training parameters of the CNN in the comparison methods and the CNN part of proposed method are the same. On the other side, several groups of tests are conducted to evaluate the robustness of the CAE-CNN method. The results of the training and testing of the network are as follows.
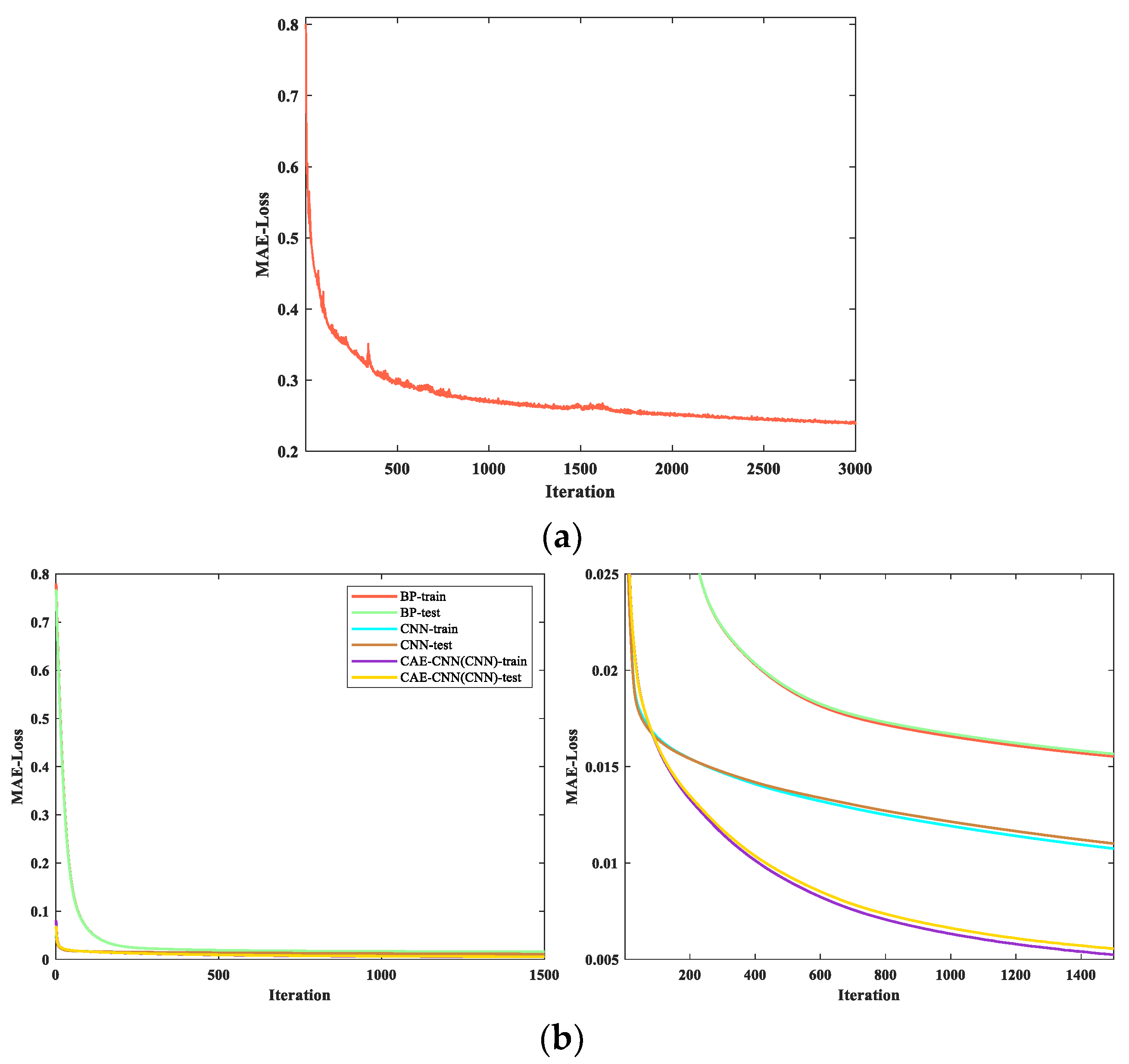
In the feature extraction of the weight matrix process, the curve of the loss change during the CAE network training is shown in
Figure 9a. In the blood velocity reconstruction part of CAE-CNN, the CNN loss curve in the process of training and testing is shown in
Figure 9b. It represents the variation of the loss value of the CAE-CNN method. For evaluating the performance of our proposed method, the training and testing curves of different neural network methods are illustrated in
Figure 9b.
In
Figure 9a, the loss function curve of CAE tends to go down overall with the increase in iteration times. The decline of the curve is rapid at first and then tends to be gentle, the loss value decreases from 0.801 to 0.240. When the number of iterations is 3000, the loss value still has a downward trend but basically remains unchanged. Considering the factor of training duration, the CAE network is set to stop training when the iteration reaches 3000 generations. As shown in
Figure 9b, loss curves of different methods have the consistent trend. The loss curve of CAE-CNN converges more slowly than that of CNN, but its final loss value is the smallest. In the period of testing, the loss can converge from 0.069 to 0.005. All of these indicate that the CAE-CNN network model achieves good performance both in training and testing.
4.1. Evaluation Metrics
To quantify the quality of the reconstructed images of the CAE-CNN method, the root mean square error (RMSE) and the correlation coefficient (CC) are taken as the metrics of the network’s performance. The expressions of RMSE and CC are defined as follows:
The sum of the square of the deviations between the predicted and real values for each reconstruction unit is divided by the total number of reconstruction units in a sample, which is used to measure the deviation between the reconstructed blood flow velocity
value and the true value
. The RMSE of a sample is calculated as follows:
The similarity between the predicted blood flow velocity value and the true value is measured by the correlation coefficient, which is between −1 and 1. The closer the value of CC is to ±1, the more linearly the predicted value is related to the true value. When CC value is 0, it means that the measurement object is linearly independent. The CC of a sample is calculated as follows:
where
is the average of the predicted blood flow velocity vector
, and
is the average of the true velocity vector
.
4.2. Arterial Blood Flow Profile Reconstruction Results
Reconstructed images of blood velocity distribution were obtained by visualizing the predicted blood flow velocity values of a network’s output.
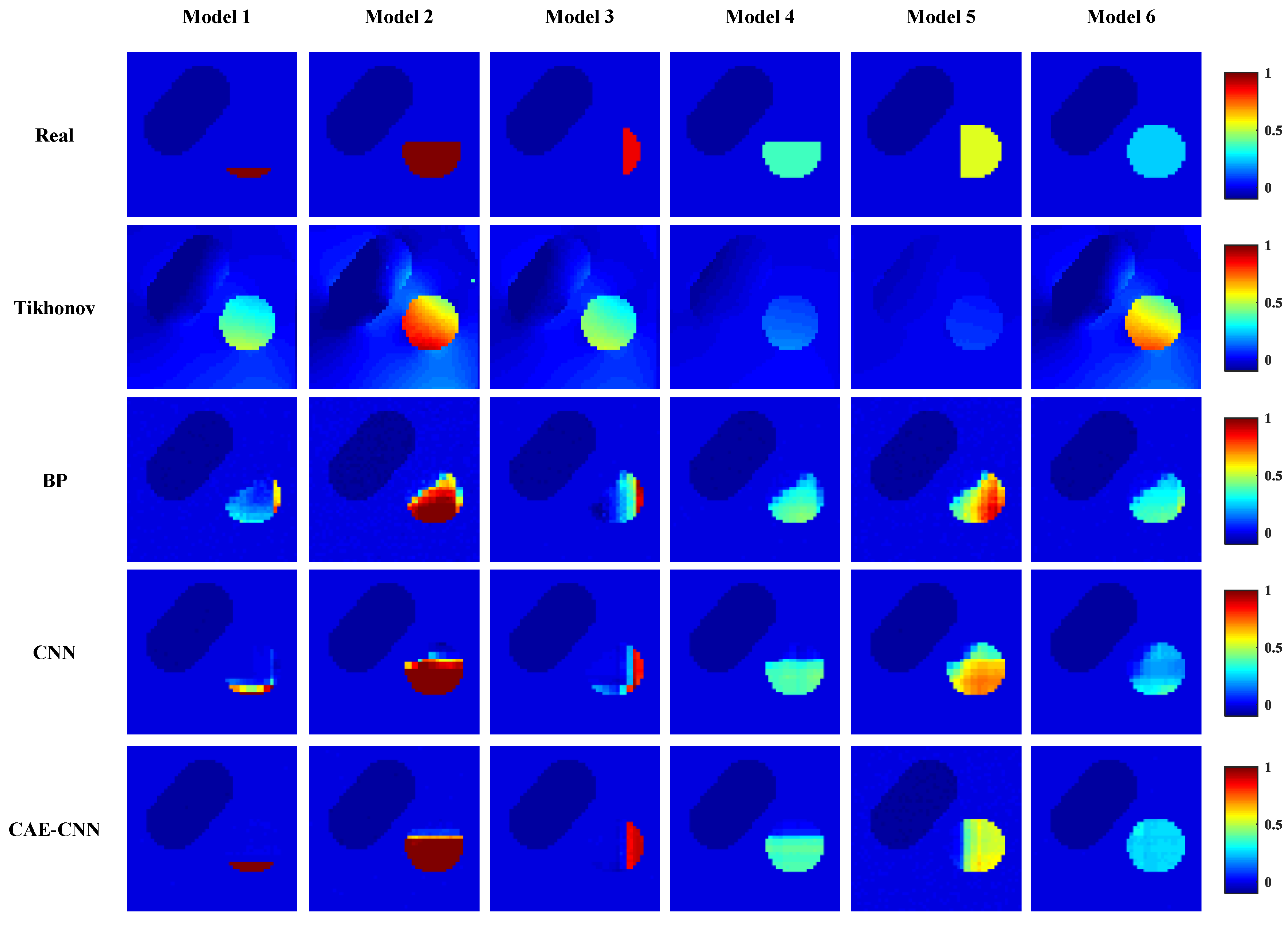
Figure 10 shows some of the reconstruction results using different methods. The top of
Figure 10 shows the actual blood flow velocity distribution of the carotid artery stenosis model in six cases, while the lower side is the blood flow velocity distribution predicted by the proposed method (row 5) and other image reconstruction methods (row 2 to 4).
In
Figure 10, the reconstruction results of CAE-CNN are approximately similar with the target blood flow velocity distribution, which proves the feasibility of the CAE-CNN method for the arterial blood flow profile reconstruction problem. Comparing the prediction results of these groups, the CAE-CNN method can well distinguish the degree and location of arterial stenosis. Moreover, the network can greatly reduce the reconstruction artifacts, and its imaging boundary of the narrow area is relatively clear.
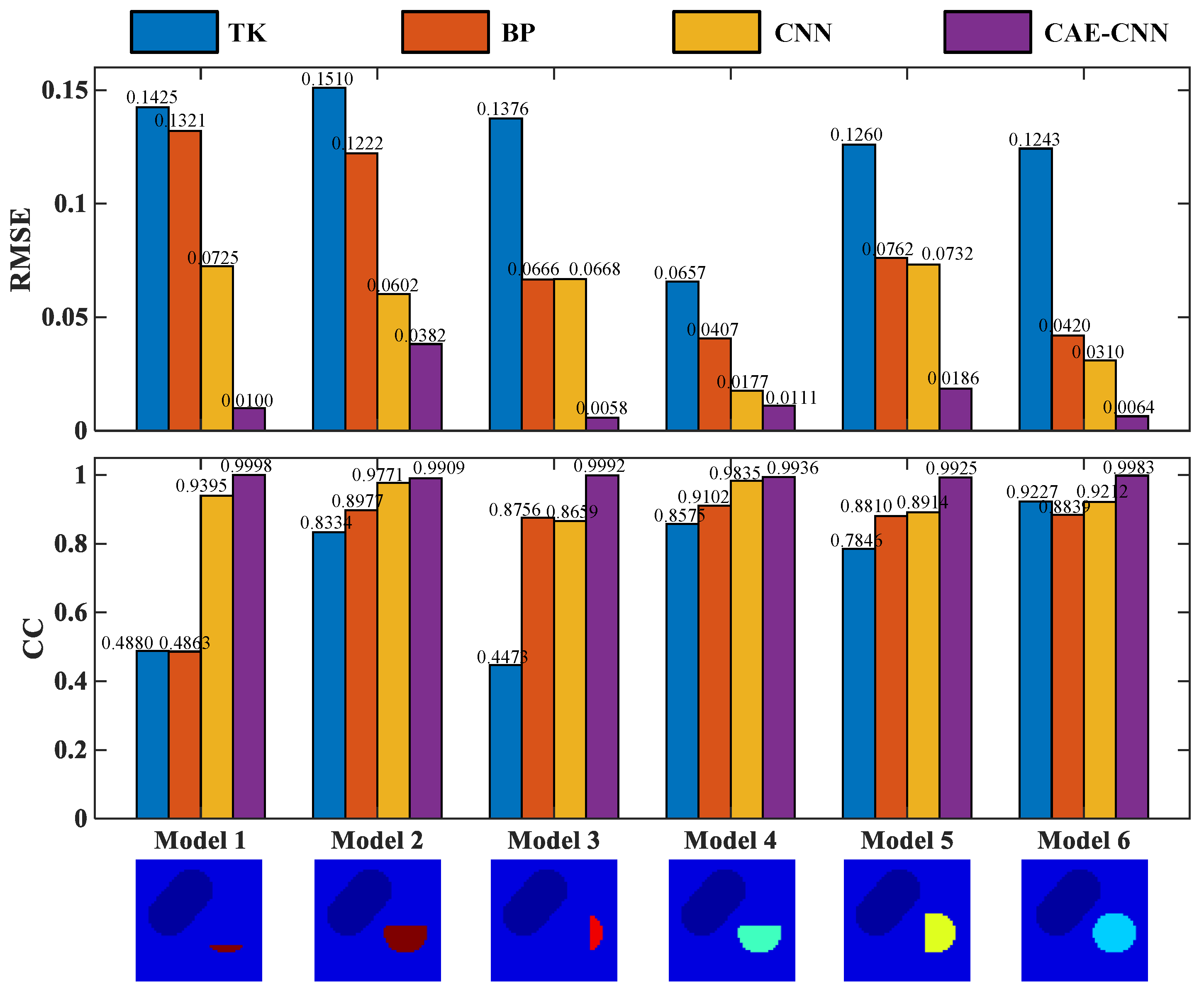
The above six test models are quantitatively evaluated with these two indexes. The RMSE and CC of each model’s reconstruction result in
Figure 10 are shown in
Figure 11.
From the results recorded in
Figure 11, CAE-CNN has the best reconstruction effect on all six samples. The CC values of the reconstructed blood flow velocity distribution of the six models range from 0.9909 to 0.9998, and the RMSE are all less than 0.0382. The results of quantitative evaluation show that the images of blood flow velocity distribution reconstructed by CAE-CNN have good image quality.
For evaluating the CAE-CNN network more comprehensively, the average values of the predicted blood flow velocity distribution results of 817 samples were calculated. The 817 samples are randomly selected from 1634 test sets. The calculation results of evaluation indexes are listed in
Table 5.
In
Table 5, the mean values of the RMSE and CC of 817 samples reconstructed by the CAE-CNN method are 0.0333 and 0.9721, respectively. On average, the proposed method achieved 74.96%, 63.25%, and 56.75% (RMSE) and 122.65%, 26.86%, and 16.31% (CC) quantitative metrics improvement compared with the Tikhonov, BP, and CNN methods, respectively. It can be seen from
Table 5 that whether it is from the RMSE, which evaluates the accuracy of the blood flow velocity estimating ability, or from the CC, which evaluates the image reconstruction quality of the method, the CAE-CNN network’s results are very good in all quantitative criteria. This shows that the CAE-CNN network can extract more abundant features from limited reconstructed information, not only reflecting the situation of arterial stenosis, but also achieving a high blood velocity estimation accuracy and obtaining higher image reconstruction quality.
4.3. Anti-Noise Performance Test Results
To test the anti-noise performance of the proposed method, the measured potential difference signal is contaminated with different degrees of noise. The level of added noise is expressed in (16).
where signal-to-noise ratio (SNR) refers to the ratio of signal to noise in a measurement system, used to evaluate the level of noise, and
and
represent the effective value of the signal and noise voltages, respectively. The white Gaussian noise at 60, 50, 40, 30, and 20 dB SNR is added to the potential.
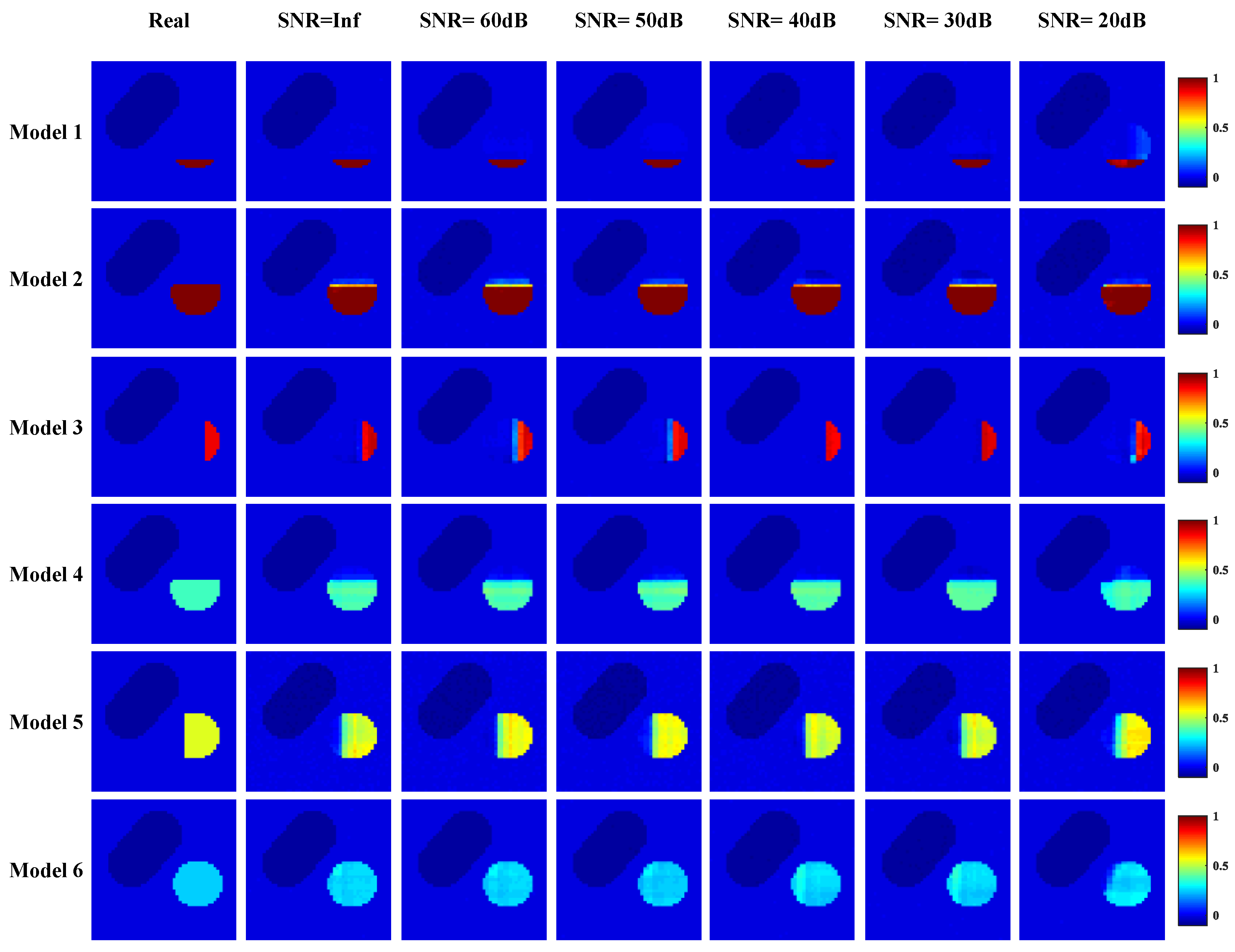
Figure 12 shows the reconstruction results of CAE-CNN at different noise levels. With the increase in noise, the blood flow velocity distribution of the proposed method can reflect the arterial stenosis. Additionally, the difference between the reconstruction effect under noise and that without noise is small. The boundary of the reconstructed stenosis area is still clear, and the reconstructed blood flow velocity distribution is close to the real distribution. When SNR = 20 dB, there are few artifacts in CAE-CNN reconstruction images, but this does not affect the judgment of arterial stenosis. The RMSE and CC of each model’s reconstruction result in
Figure 12 are listed in
Figure 13.
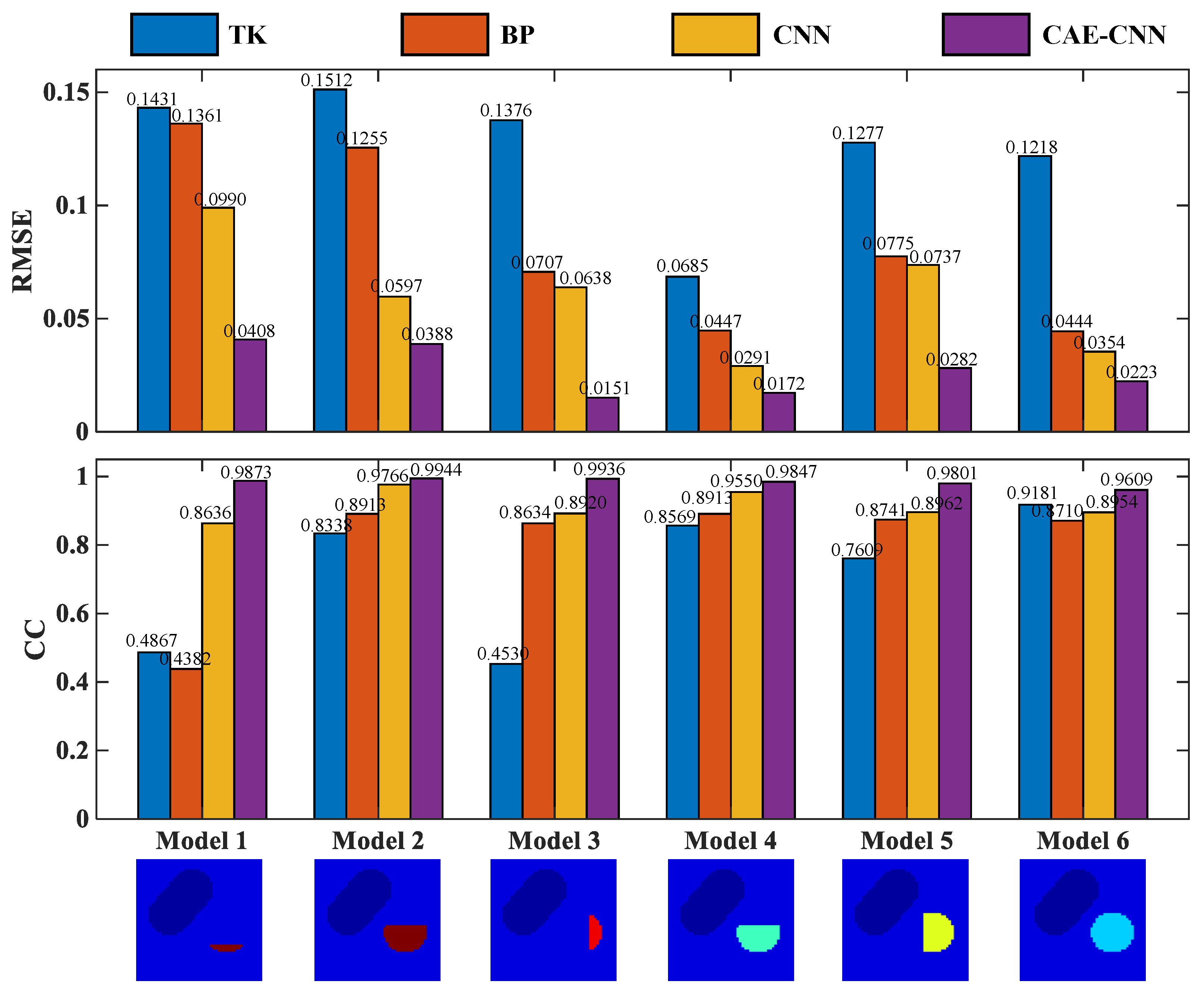
To evaluate the proposed method objectively,
Figure 13 shows the evaluation index results of the six models reconstructed by different methods when SNR = 20 dB. RMSE values of the six models reconstructed by the CAE-CNN method are all less than 0.0408, and CC values are all greater than 0.9606.
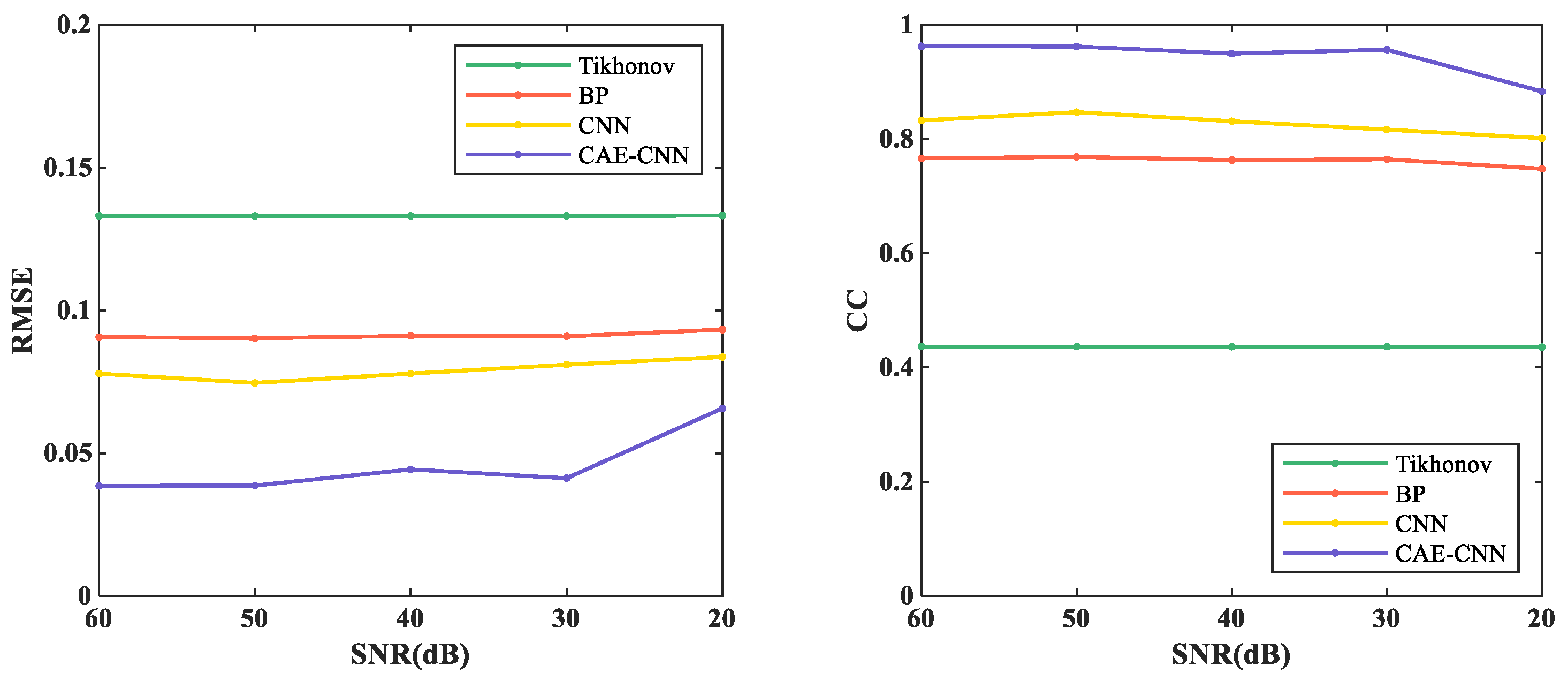
The quantitative analysis is made from the perspective of evaluation indicators, and the average RMSE and CC of different methods in the random 817 test samples with different noise levels are shown in
Figure 14.
From
Figure 14, RMSE decreased from more than 0.1331 to no less than 0.0657, and CC increased from less than 0.4358 to more than 0.8830 by using CAE-CNN. As the measurement noise disturbance intensifies, the reconstruction performances of the CAE-CNN network were just slightly decreased. When the SNR is between 60 and 30 dB, the RMSE and CC of CAE-CNN reconstruction results vary from 0.0386 to 0.0443 and 0.9622 to 0.9493, respectively. When the SNR was 20 dB, the RMSE and CC of the proposed method were 0.0657 and 0.8831, respectively. Compared with the CNN, the RMSE and CC of CAE-CNN at 20 dB are optimized by 21.41% and 10.22%, respectively. The above results mean that the CAE-CNN method has good performance in the noise experiments.
5. Discussion
The experimental process and results of this paper are discussed as follows.
The reconstruction results are shown in
Figure 10, and the evaluation index results are shown in
Figure 11 and
Table 5. From
Figure 10, traditional algorithms can distinguish between arteries and veins, but cannot show the details of arterial stenosis. Traditional methods for solving underdetermined problems generally have two ideas. One is to treat it as a linear programming problem. An appropriate iterative algorithm is used to solve the optimal solution of the equation in the sense of least squares. Another is the singular value decomposition of the weight matrix. The reciprocal of the singular value of the weight matrix is used to construct its generalized inverse matrix, and it is multiplied by the potential difference to directly solve the blood flow velocity. The local optimal solution is obtained by these methods, but they do not fundamentally overcome the underdetermination and ill-posedness of the arterial blood flow profile reconstruction based on the electromagnetic effect. Therefore, the traditional algorithm cannot meet the needs of clinical diagnosis in imaging resolution. On the other hand, the adopted carotid artery stenosis model has strong nonlinearity. This leads to a better performance of traditional algorithms on simple models [
36], but not in our work. A deep neural network can automatically learn and directly approximate the complex nonlinear mapping relationship between the input and output. It makes up for some of the shortcomings of traditional algorithms in solving nonlinear ill-posed problems.
In the neural network reconstruction algorithm, the reconstruction results of BP and CNN networks have some artifacts. The proposed method improves the imaging artifacts. Additionally, the results in
Figure 11 and
Table 5 show that the proposed method is more accurate in predicting the distribution of blood flow velocity. The reason why the reconstruction effects of BP and CNN are not as good as CAE-CNN is that the amount of reconstructed information is insufficient. Only 11 potential difference data are used as the input of BP and CNN. CAE has the ability to obtain effective low-dimensional representation of input by reconstructing input data and has achieved good results in [
37,
38,
39,
40]. CAE extracted the low-dimensional features of the weight matrix and obtained the details of the reconstruction information. After data domain transformation, the dimension of reconstruction information data is expanded from 11 to
. In this way, the reconstruction information for the CAE-CNN network is increased and more detailed. The network structure and parameters of CNN in the comparison method is the same as that in the proposed method. The results of CAE-CNN are better than those of CNN, indicating that a reconstruction information increase is effective for improving the imaging quality. However, there are losses in the training process of CAE, so that the extracted weight matrix features cannot contain all the weight information. This is one of the reasons for the loss during the final blood flow velocity reconstruction.
Figure 12,
Figure 13 and
Figure 14 show the results of noise resistance tests by each method. The reconstruction performance of CAE-CNN in noise test is better than other comparison methods. As shown in
Figure 14, when SNR changes from 30 to 20 dB, the evaluation index largely deteriorates. This phenomenon can be attributed to the problem that the noise signal is amplified invisibly due to the enlargement of reconstruction information. However, when SNR = 20 dB, the reconstruction effect of the CAE-CNN method is still better than that of other comparison methods. Furthermore, the flow-induced potentials generated by the carotid artery will be extremely small. They will be contaminated by large bio-potentials (such as electrocardiosignal) lying in the same frequency range as the flow-induced signals. The effects of such bio-potentials may well be harder to eliminate than the Gaussian white noise signals. The proposed method is not able to be tested for reconstruction performance in this noisy environment due to the lack of clinical data.
For the effectiveness of the proposed method in clinical workflow, the authenticity of the generated data sets is very important. A carotid artery model with various stenoses was developed based on anatomical knowledge. The establishment of the model is considered in three aspects: the complexity of the model structure, the setting of conductivity and the setting of blood flow velocity. The structure and size of the model were designed according to the real cross-section of the human neck fascial layers. The area of real neck vessels is very small, and the change of the potential difference signal caused by vascular lesions is weak. Without considering the true location and size of the blood vessels on the whole cervical cross-section, the imaging effect of the trained network will be reduced in practical applications. Moreover, the model retains the main components of the neck cross-section, and the electrical conductivity of each part is set according to the real physiological parameters. This makes the conductivity distribution in the model more complex, enhances the nonlinearity, and increases the difficulty of reconstruction. In terms of velocity setting, the velocity of the stenosis is different from that of the normal vessels. So, the relationship between the stenosis rate and the blood flow velocity at the stenosis was analyzed. When the effect of stenosis rate on blood flow velocity is taken into account, the variation of the potential difference signal will be smaller than that when this effect is not taken into account. Although this requires a higher level of performance of the reconstruction algorithm for solving blood flow distribution, it is closer to the actual situation. It is noteworthy that there are other more complex stenosis conditions in the design of the distribution of arterial stenosis except the case mentioned in this paper. Additionally, the shape of the neck cross-section and the locations of the blood vessels were different between patients. Even though the blood flow velocity of the carotid vein fluctuates smoothly and evenly, it is still variable. The measured induced potential will also be affected by these changes. These more complicating factors are not considered in the proposed model. Additionally, the established simple vessel model does not cover the relationship between blood flow velocity and the stenosis rate corresponding to all stenosis lesions, and there are some idealized factors.
6. Conclusions
According to the electromagnetic effects of blood flow, a DNN method is proposed to reconstruct the arterial blood flow profile in this paper. The framework of the proposed method is established and trained by the data set obtained from a 2D carotid artery stenosis model. The potential difference measured by the electrodes distributed on the neck skin is used as reconstruction information, and the blood velocity distribution is regarded as a reconstruction target for obtaining the arterial blood flow profile image. Different from the previous methods, the proposed method firstly increased the dimensions of limited reconstruction information data, and then it predicted the blood flow velocity distribution. The CAE network is trained by the input weight matrix to extract weight matrix features. The weight matrix features are combined with the potential difference on the basis of the specific mathematical relationship for calculating the blood velocity distribution features. After the above process, the reconstruction information is increased in dimension and supplemented with details. Then, the blood velocity distribution features are divided into training sets and testing sets for CNN. Additionally, the testing sets are input into the trained CNN to predict the blood flow velocity and reconstruct high-quality arterial blood flow profile images. The reconstruction results of 817 samples that have not been used for training show that the RMSE and CC of the proposed method were 0.0333 and 0.9721, respectively. Additionally, the performance of the proposed method is better than Tikhonov, BP and CNN, both in noiseless and noisy tests.
In the future, we plan to improve the network structure to make it more robust to noise. On the side, in the process of modeling, more complex arterial stenosis conditions and the corresponding relationship between blood flow velocity and stenosis rate should be considered to improve the generalization ability of the proposed method.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}