
H∞ Observer Based on Descriptor Systems Applied to Estimate the State of Charge


Abstract
:1. Introduction
- 1.
- The derivation of the piecewise function increased the order of the observer, which did not match the original system, and the observer error was not converged potentially;
- 2.
- The derivation of the current was ignored completely, so the dynamic performance of the observer became worse.
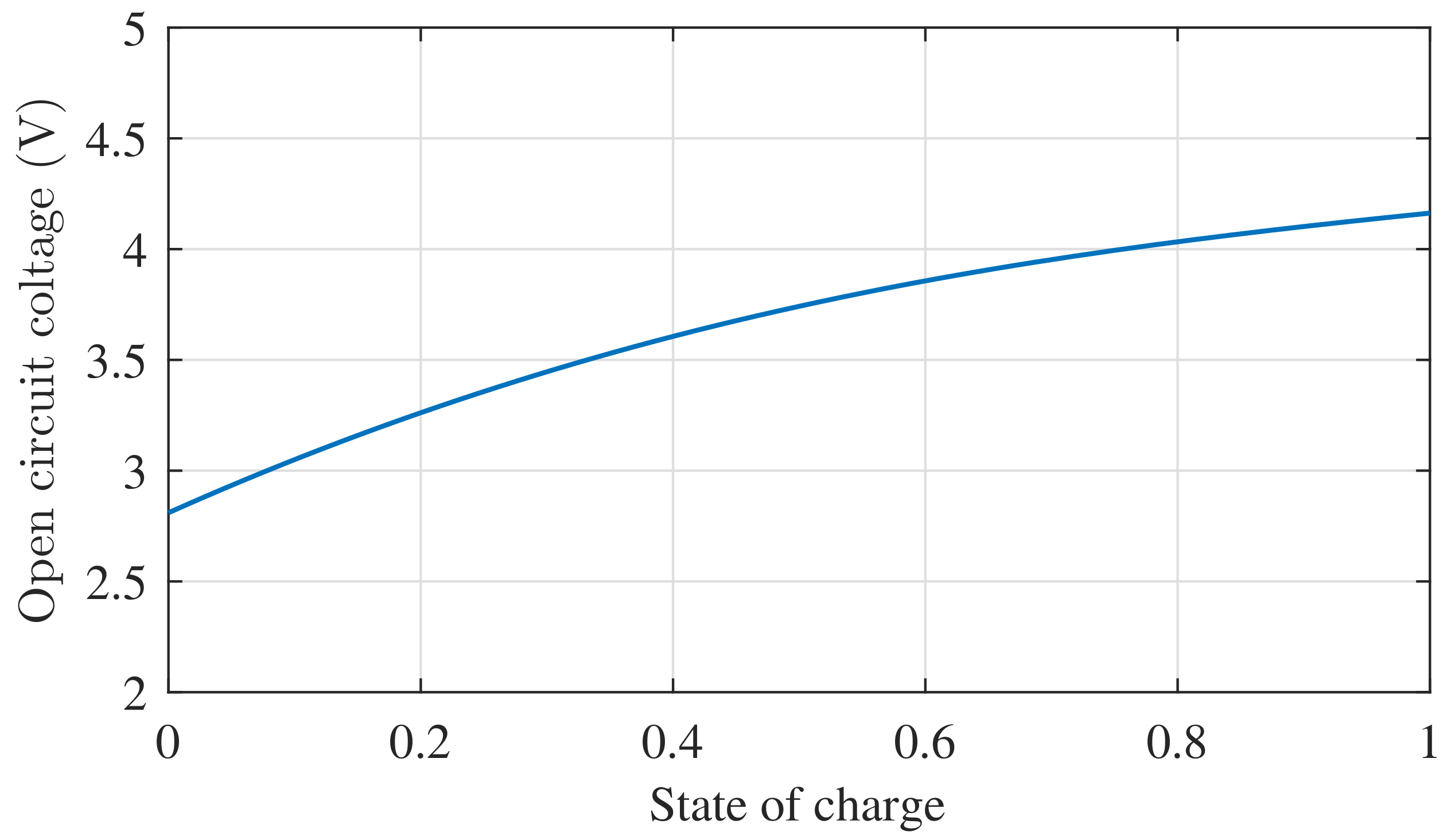
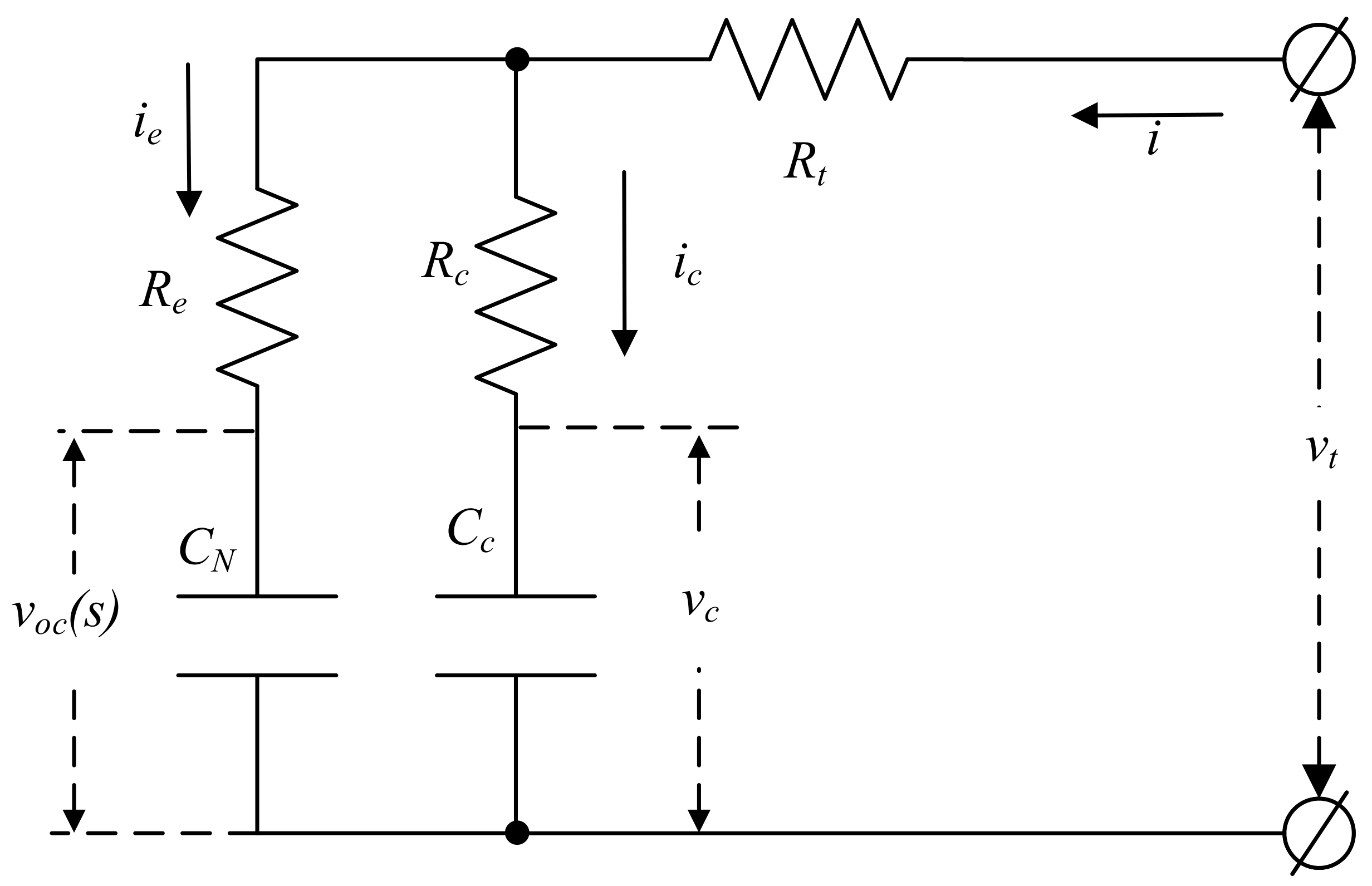
2. Battery Model
3. Observer
- 1.
- With , the estimate error is asymptotically stable;
- 2.
- With , for a prescribed level of noise , will be satisfied.
- 1.
- Model the battery system as a descriptor system (2);
- 2.
- Determine the matrix by ;
- 3.
- Determine the matrix by the (9);
- 4.
- Choose the prescribed level of noise by optimization problems (13);
- 5.
- Solve the feasible solution of (11) given by Theorem 1;
- 6.
- Calculate the matrices H, J, P, Q, R, , and ;
- 7.
- Convert the virtual output into the actual measurable output by .
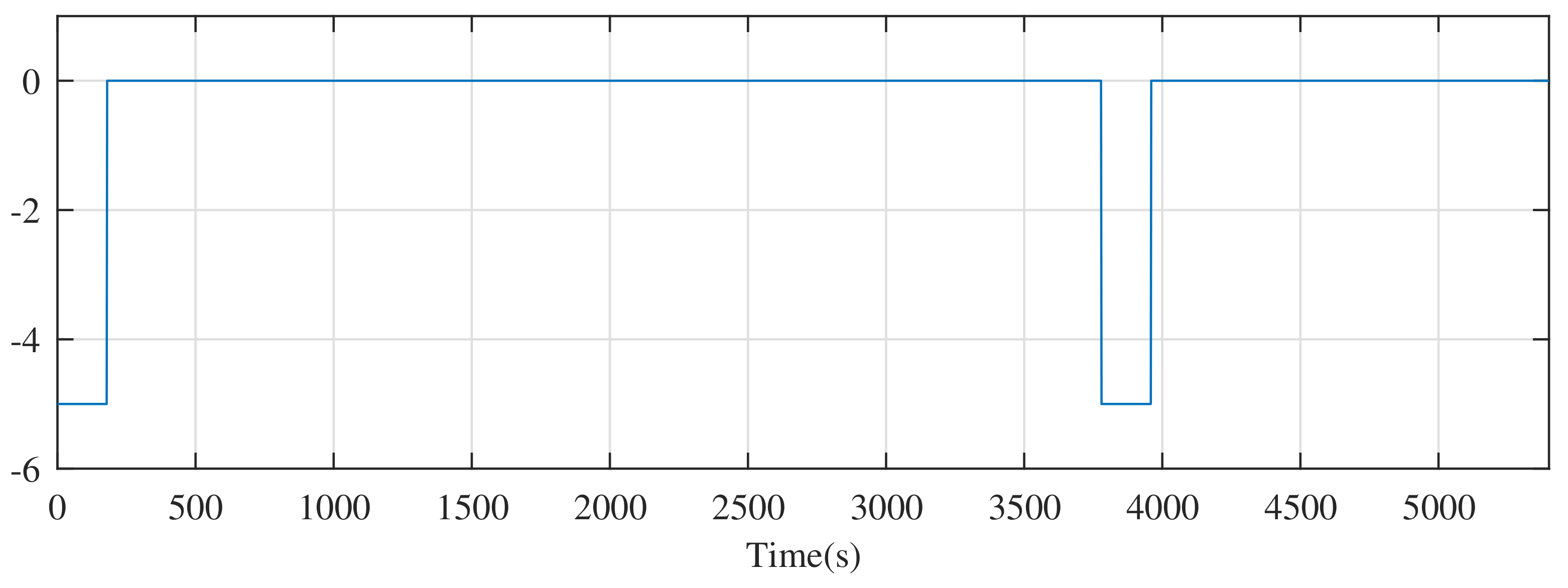
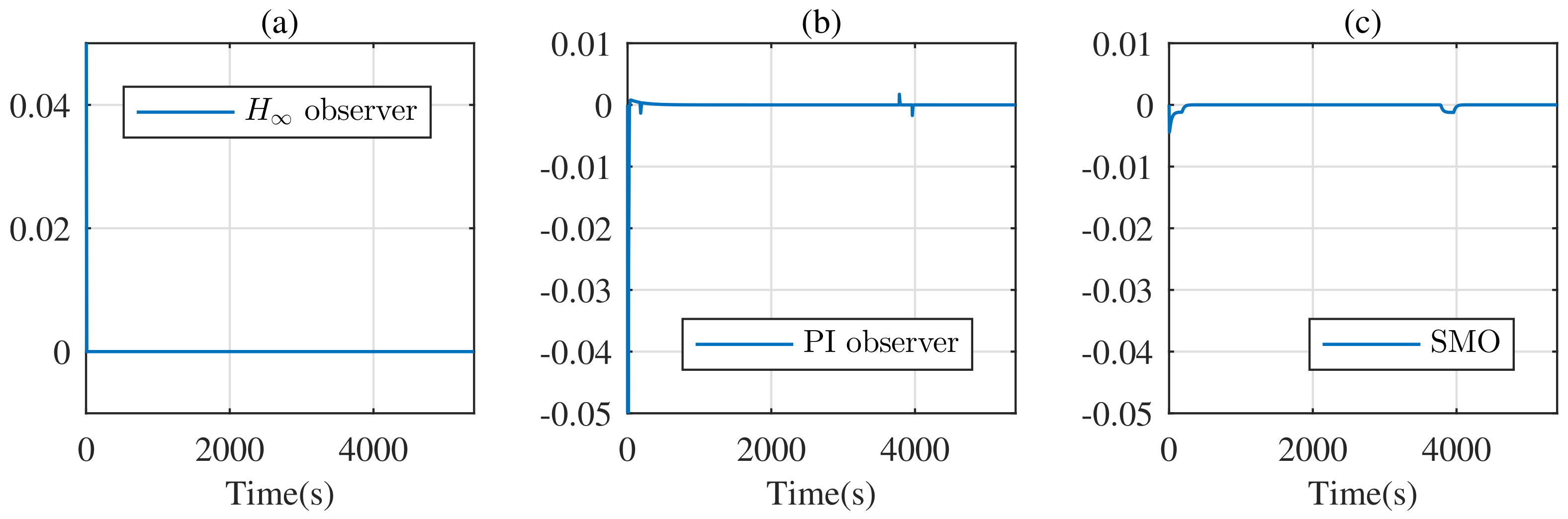
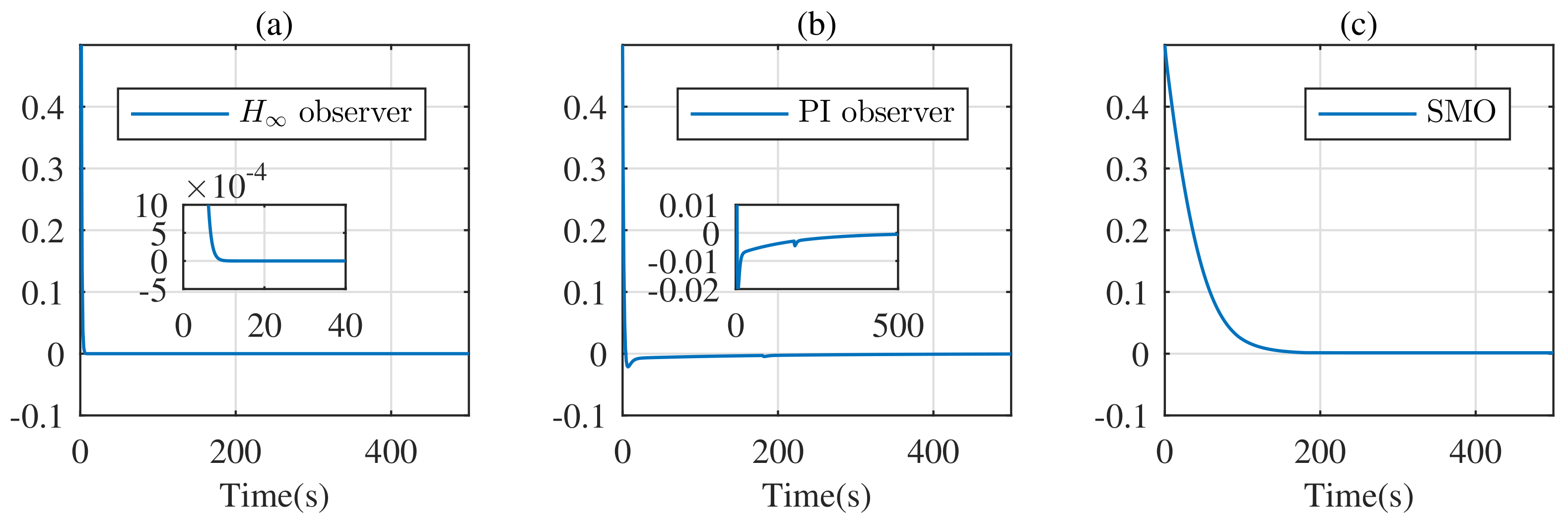
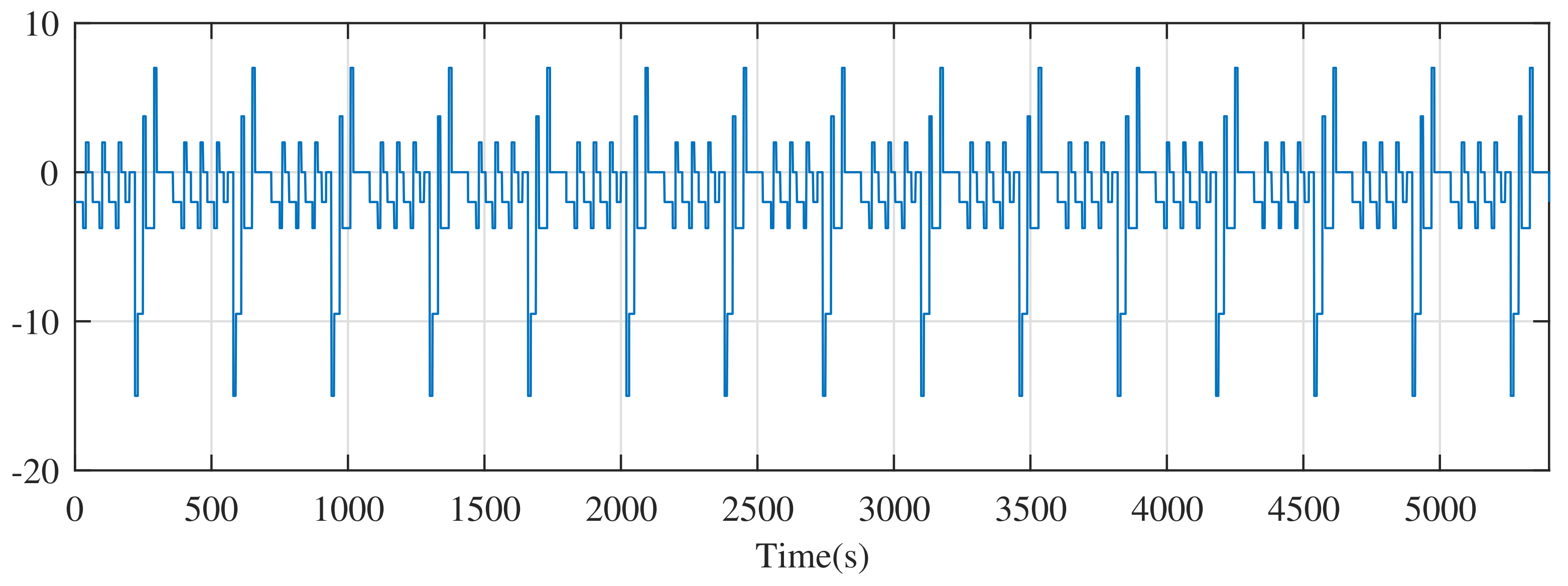
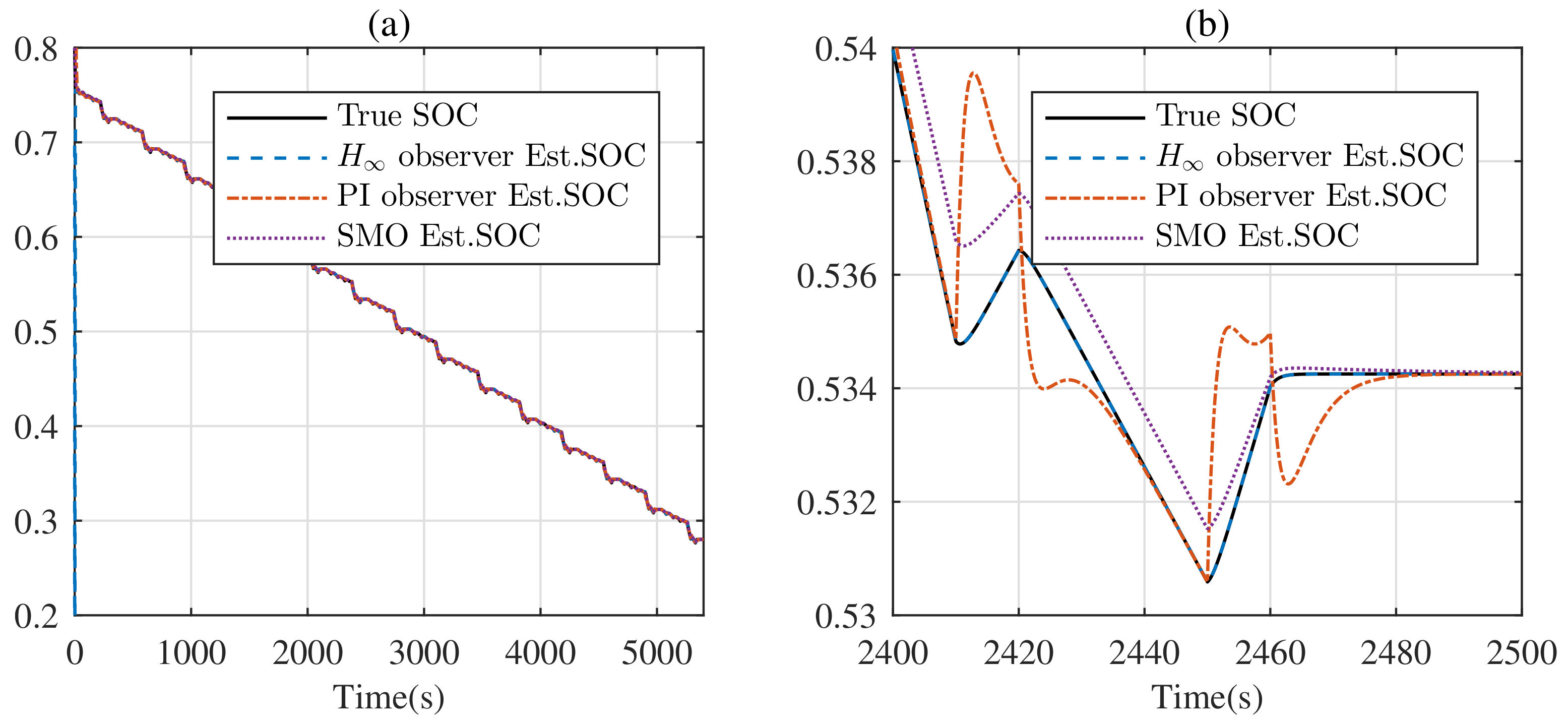
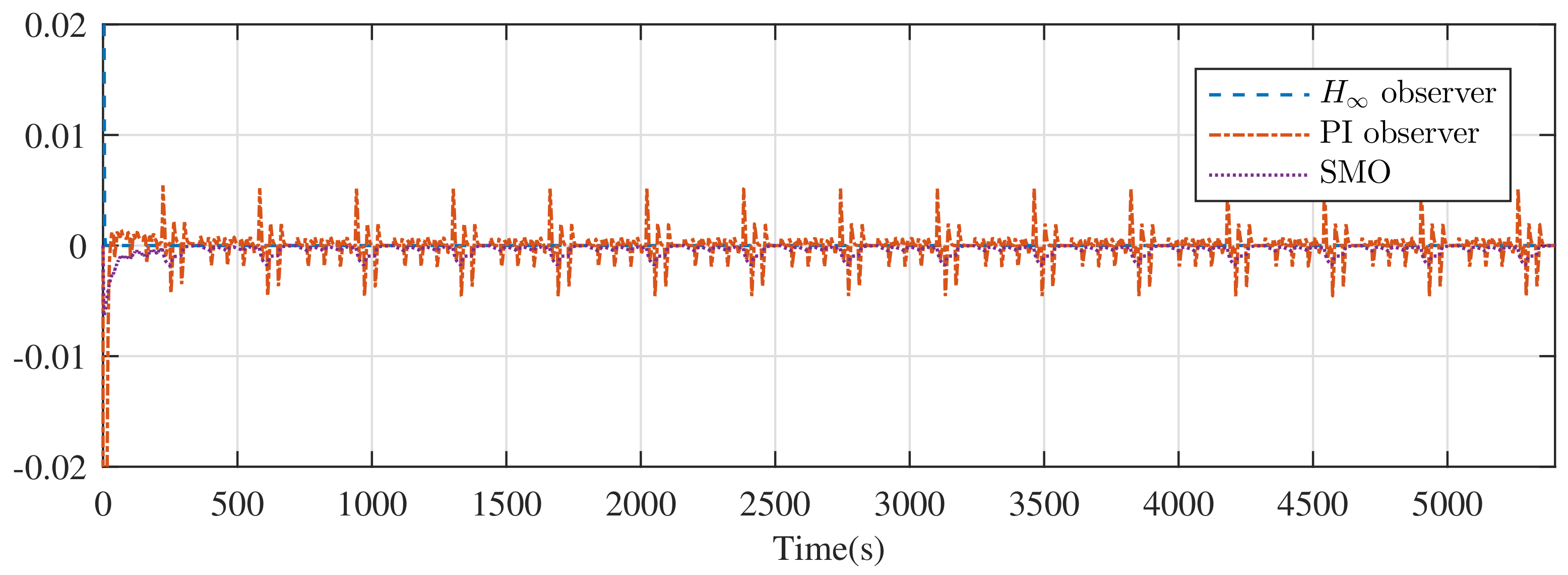
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| REVs | Renewable energy vehicles |
| SOC | State of charge |
| OCVM | Open-circuit voltage method |
| CCM | Coulomb counting method |
| KF | Kalman filter |
| SMO | Sliding-mode observer |
| PI | Proportional-integral |
| OCV | Open-circuit voltage |
| RC | Resistance–capacitance |
| LMI | Linear matrix inequality |
| DST | Dynamic stress test |
| RMSE | Root mean square error |
| MAE | Maximum absolute error |
References
- Chen, X.; Zhang, T.; Ye, W.; Wang, Z.; Iu, H.H.C. Blockchain-Based Electric Vehicle Incentive System for Renewable Energy Consumption. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 396–400. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, X.; Dou, X.; Zhang, X. A rapid online calculation method for state of health of lithium-ion battery based on coulomb counting method and differential voltage analysis. J. Power Sources 2020, 479, 228740. [Google Scholar] [CrossRef]
- Soylu, E.; Soylu, T.; Bayir, R. Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System. Entropy 2017, 19, 146. [Google Scholar] [CrossRef] [Green Version]
- Sethia, G.; Nayak, S.K.; Majhi, S. An Approach to Estimate Lithium-Ion Battery State of Charge Based on Adaptive Lyapunov Super Twisting Observer. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1319–1329. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.I.B.; Mekhilef, S. Overview of Model-Based Online State-of-Charge Estimation Using Kalman Filter Family for Lithium-Ion Batteries. Renew. Sustain. Energy Rev. 2019, 113, 109233. [Google Scholar] [CrossRef]
- Barillas, J.K.; Li, J.; Guenther, C.; Danzer, M.A. A comparative study and validation of state estimation algorithms for Li-ion batteries in battery management systems. Appl. Energy 2015, 155, 455–462. [Google Scholar] [CrossRef]
- Xu, J.; Mi, C.C.; Cao, B.; Deng, J.; Chen, Z.; Li, S. The State of harge Estimation of Lithium-Ion Batteries Based on a Proportional-Integral Observer. IEEE Trans. Veh. Technol. 2014, 63, 1614–1621. [Google Scholar]
- Prajapati, V.; Hess, H.; William, E.J.; Gupta, V.; Huff, M.; Manic, M.; Rufus, F.; Thakker, A.; Govar, J. A Literature Review of State Of-Charge Estimation Techniques Applicable to Lithium Poly-Carbon Monoflouride (LI/CFx) Battery. In Proceedings of the India International Conference on Power Electronics 2010 (IICPE2010), New Delhi, India, 28–30 January 2011; IEEE: New York, NY, USA, 2011; pp. 1–8. [Google Scholar]
- Rahimi-Eichi, H.; Baronti, F.; Chow, M.Y. Online Adaptive Parameter Identification and State-of-Charge Coestimation for Lithium-Polymer Battery Cells. IEEE Trans. Ind. Electron. 2013, 61, 2053–2061. [Google Scholar] [CrossRef]
- Du, J.; Liu, Z.; Wang, Y.; Wen, C. An adaptive sliding mode observer for lithium-ion battery state of charge and state of health estimation in electric vehicles. Control Eng. Pract. 2016, 54, 81–90. [Google Scholar] [CrossRef]
- Li, K.; Zhou, P.; Lu, Y.; Han, X.; Zheng, Y. Battery life estimation based on cloud data for electric vehicles. J. Power Sources 2020, 468, 228192. [Google Scholar] [CrossRef]
- Afshar, S.; Morris, K.; Khajepour, A. State-of-Charge Estimation Using an EKF-Based Adaptive Observer. IEEE Trans. Control Syst. Technol. 2019, 27, 1907–1923. [Google Scholar] [CrossRef]
- Qiao, Z.; Liang, L.; Hu, X.; Xiong, N.; Hu, G. H∞-Based Nonlinear Observer Design for State of Charge Estimation of Lithium-Ion Battery with Polynomial Parameters. IEEE Trans. Veh. Technol. 2017, 99, 1–13. [Google Scholar]
- Chang, F.; Zheng, Z. An SOC Estimation Method Based on Sliding Mode Observer and the Nernst Equation. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; IEEE: New York, NY, USA, 2015; pp. 6187–6190. [Google Scholar]
- Chen, Q.; Jiang, J.; Ruan, H.; Zhang, C. Simply Designed and Universal Sliding Mode Observer for the SOC Estimation of Lithium-ion Batteries. IET Power Electron. 2017, 10, 697–705. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.; Han, X.; Feng, X.; Lu, L.; Li, J. Error Analysis of the Model-Based State-of-Charge Observer for Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 8055–8064. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L.; Wang, H. Estimation of Battery State of Charge With H∞ Observer: Applied to a Robot for Inspecting Power Transmission Lines. IEEE Trans. Ind. Electron. 2012, 59, 1086–1095. [Google Scholar] [CrossRef]
- Huang, J.; Ma, X.; Che, H.; Han, Z. Further Result on Interval Observer Design for Discrete-Time Switched Systems and Application to Circuit Systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2542–2546. [Google Scholar] [CrossRef]
- Meng, F.; Pang, A.; Dong, X.; Han, C.; Sha, X. H∞ Optimal Performance Design of an Unstable Plant under Bode Integral Constraint. Complexity 2018, 2018, 4942906. [Google Scholar] [CrossRef] [Green Version]
- Meng, F.; Wang, D.; Yang, P.; Xie, G. Application of Sum of Squares Method in Nonlinear H∞ Control for Satellite Attitude Maneuvers. Complexity 2019, 2019, 5124108. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.Z.; Zhu, Q.; Li, L.; Liu, W.Q.; Wang, L.Y.; Xiong, N.; Wang, X.Y. A State of Charge Estimation Method Based on H∞ Observer for Switched Systems of Lithium-Ion Nickel-Manganese-Cobalt Batteries. IEEE Trans. Ind. Electron. 2017, 64, 8128–8137. [Google Scholar] [CrossRef]
- Chen, W.; Chen, W.T.; Saif, M.; Li, M.F. Simultaneous Fault Isolation and Estimation of Lithium-Ion Batteries via Synthesized Design of Luenberger and Learning Observers. IEEE Trans. Control Syst. Technol. 2013, 22, 290–298. [Google Scholar] [CrossRef]
- Kim, I.S. Nonlinear State of Charge Estimator for Hybrid Electric Vehicle Battery. IEEE Trans. Power Electron. 2008, 23, 2027–2034. [Google Scholar]
- Zheng, G.; Efimov, D.; Bejarano, F.J.; Perruquetti, W.; Wang, H. Interval observer for a class of uncertain nonlinear singular systems. Automatica 2016, 71, 159–168. [Google Scholar] [CrossRef]
- Berger, T.; Reis, T. Observers and Dynamic Controllers for Linear Differential-Algebraic Systems. SIAM J. Control Optim. 2017, 55, 3564–3591. [Google Scholar] [CrossRef]
- Duan, G.R. Analysis and Design of Descriptor Linear Systems. In Advances in Mechanics and Mathematics; Springer New York: New York, NY, USA, 2010; Volume 23. [Google Scholar]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the CACSD Conference, Taipei, Taiwan, 2–4 September 2004; IEEE: New York, NY, USA, 2004. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 18,000 F | 200 F | 0.003 | 0.003 | 0.001 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, S.; Li, S.; Chi, H.; Meng, F.; Pang, A. H∞ Observer Based on Descriptor Systems Applied to Estimate the State of Charge. Entropy 2022, 24, 420. https://doi.org/10.3390/e24030420
Meng S, Li S, Chi H, Meng F, Pang A. H∞ Observer Based on Descriptor Systems Applied to Estimate the State of Charge. Entropy. 2022; 24(3):420. https://doi.org/10.3390/e24030420
Chicago/Turabian StyleMeng, Shengya, Shihong Li, Heng Chi, Fanwei Meng, and Aiping Pang. 2022. "H∞ Observer Based on Descriptor Systems Applied to Estimate the State of Charge" Entropy 24, no. 3: 420. https://doi.org/10.3390/e24030420
APA StyleMeng, S., Li, S., Chi, H., Meng, F., & Pang, A. (2022). H∞ Observer Based on Descriptor Systems Applied to Estimate the State of Charge. Entropy, 24(3), 420. https://doi.org/10.3390/e24030420