1. Introduction
Fitts [
1] was the first to empirically study the problem of information capacity and transfer in the velocity–accuracy motion paradigm. His study was a theoretical approach developed from the information theory of Shannon and Weaver [
2]. He described the human motor system from the equation
by setting an index of difficulty (ID;
) determined from the distance to the target (A) and the target width (W). This ID has a unit of information (bit), and the above equation indicates that when the ID is higher, the movement time (MT) required to process more bits is larger. This equation also known as Fitts’ law has been recognized as the most important basic principle of human physical movement [
3].
Information entropy is a functional measure corresponding to information capacity in human information processing models [
4] and is used to infer uncertainty, disorder, and variability in physical systems [
2,
5,
6]. It has also been applied to human motion. For example, the Kolmogorov–Sinai entropy [
7] and approximate entropy [
8] methods have been applied to time series with strong periodicities, such as those found in basic human motion patterns. This was used to quantify the regularity of the data. However, in the approach of Fitts [
1], developed from information theory, information entropy is not calculated, and information capacity is estimated from the ID determined by the range of variation of endpoints [
1,
9]. In light of this, an attempt has been made to link the concept of information entropy which is common in terms of uncertainty, with the concept of the ID in Fitts’ law [
10]. In other words, exercise outcome was measured directly in terms of probability. For example, using the characteristics of the frequency distribution, the probability is calculated from the amount of data corresponding to each bin, the information entropy is calculated, the distribution of the raw data is assumed to be Gaussian, and the information entropy is calculated by finding the probability at each time point of the trajectory [
10]. However, in all these studies, discrete aiming movements were used. Furthermore, the analysis was conducted using data only in the main direction of motion, with data acquired by moving in a plane in two dimensions. Notably, this is not a problem since Fitts’ law has been adapted to discrete motion in his later studies [
11]. However, one possible reason this method is still used is that it is difficult to analyze whether the motion is continuous in three dimensions. Additionally, since Fitts’ experiment [
1] used a continuous aiming motion which is a three-dimensional motion, it was considered necessary to verify the results following the original Fitts experiment.
In a different vein, our previous study [
12], using trajectories toward the target in Fitts’ experimental paradigm as the topic of analysis, showed that the values (variation values) quantified by principal component analysis for the three-dimensional coordinates corresponding to any time point in the trajectory gradually decreased toward the target. We thought that since Fitts’ original study [
1] did not fully control for the possibility of deviation from the target that occurred during the trial and also reported that a 4% error was allowed to occur [
13], it was necessary to study this in an environment where the error was controlled to 0%. This study adds a new condition wherein the error rate is controlled to 0% and shows that in such cases, this decrease is even greater than in the previous condition. In addition, this new study examined how the variability of the trajectory toward the target changes when the error is controlled to 0%. Furthermore, the study concluded that the gradual decrease in the magnitude of variability toward the target may have been the result of information processing. In other words, rather than the result of information processing appearing at the target endpoint, this study expressed the process of information processing before reaching the target. However, although that analysis used three-dimensional coordinates of the raw data, it did not follow changes in all data because we used a principal component analysis to transform the data into one dimension and then examined changes in those values, as in other previous studies with one-dimensional data as the subject of analysis. We have not been able to examine information processing from the perspective of probability because of information entropy, as in the aforementioned study by Lai et al. [
10].
Therefore, this study examined information processing from a probability perspective by estimating directly from the concept of information entropy the possibility that information processing was performed to reduce variation based on the reduction in variation described above. In doing so, we attempted to estimate entropy using the coordinates obtained from the three-dimensional motion as they are. In addition, given that it has been pointed out that the trajectories of hand movements such as those in this study differ from one individual to another [
14], we considered it necessary to first examine the characteristics of each participant separately. Therefore, as a first step before examining the generality of information processing, we decided to examine the results of two IDs (easy and difficult conditions defined by Fitts’ ID) from a large number of trials by a single participant.
4. Discussion
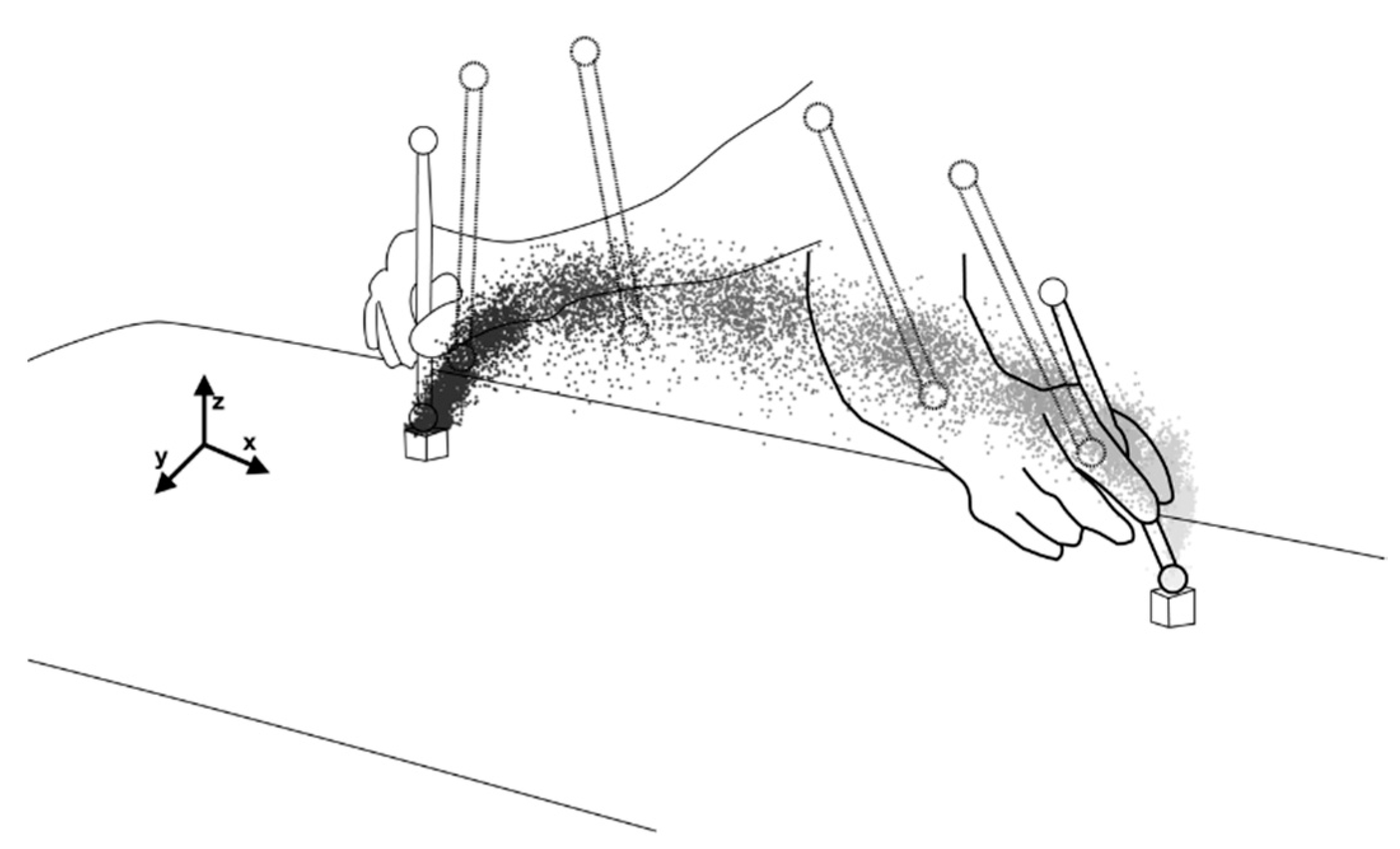
The purpose of this study was to directly quantify the variability of trajectories during a continuous-aiming task using Fitts’ experimental paradigm in terms of information entropy and mutual information content to estimate the amount of trajectory information processing. In doing so, the three-dimensional coordinates of each of the 11 time points (0%, 10%, …, 100% MT) of the trajectory were directly transformed into a measure of information entropy, a concept of probability, by introducing and encoding the same scale as the target point in three-dimensional space and fixing the bin width in each axis. The method used in this study to encode the three-dimensional coordinates of each time point allows for the consideration of influences other than the axis of the direction of movement, which is primarily important in Fitts’ experimental paradigm [
1]. Prior studies have addressed movement in two or three dimensions as the subject matter, and only one-dimensional data, the direction of movement, are taken into account in the analysis [
9,
10,
20]. Most studies conducted using Fitts’ experimental paradigm dealt with coordinates related to the direction of movement in data analysis of trajectories [
10,
17]. Our previous study [
12] obtained coordinates in three dimensions, which is not an exception because this value was treated as one-dimensional data by principal component analysis. In this study, to facilitate the calculation of probabilities for each time point, we fixed the width, length, and height of the target to 15 mm and the size of the reflective marker and manipulated two IDs (ID = 3, 6) by changing the distance between the targets. We then encoded the three-dimensional coordinates of each time point into the cube by giving the experimental space a regular cube of 15 mm on one side. This is a newly devised method for calculating probabilities from variables that encompass the influence of three-dimensional coordinates. In contrast to this method, the probability of each bin at each time point was calculated using a method that fixed the width of the bin at 15 mm on each axis.
Information entropy obtained using experimental data may provide a more accurate estimate of information entropy than the assumed structure of the data distribution or the entropy of an a priori defined task [
9,
10]. In this study, the entropy values obtained from the coded methods and
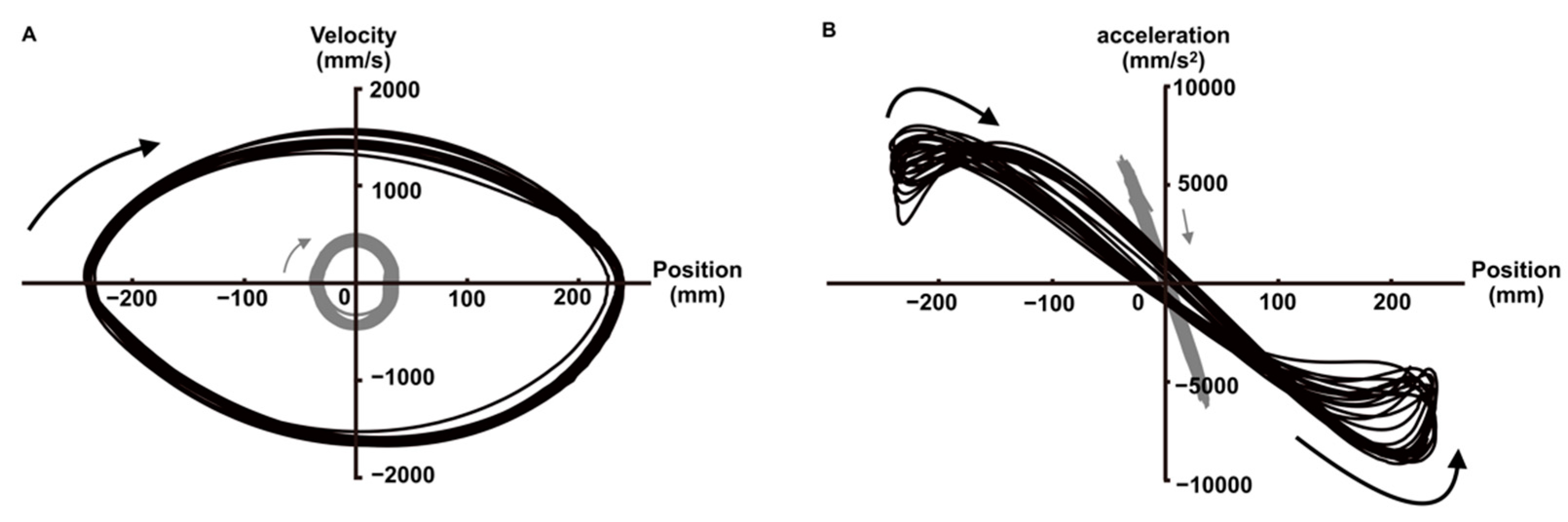
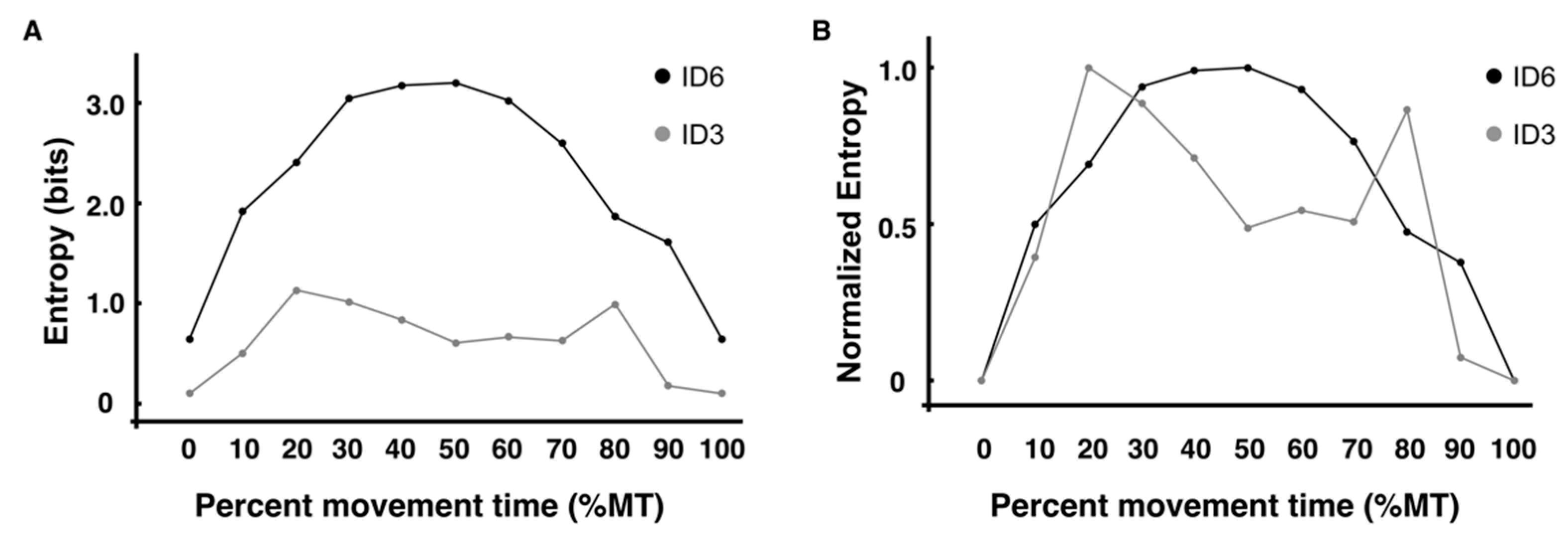
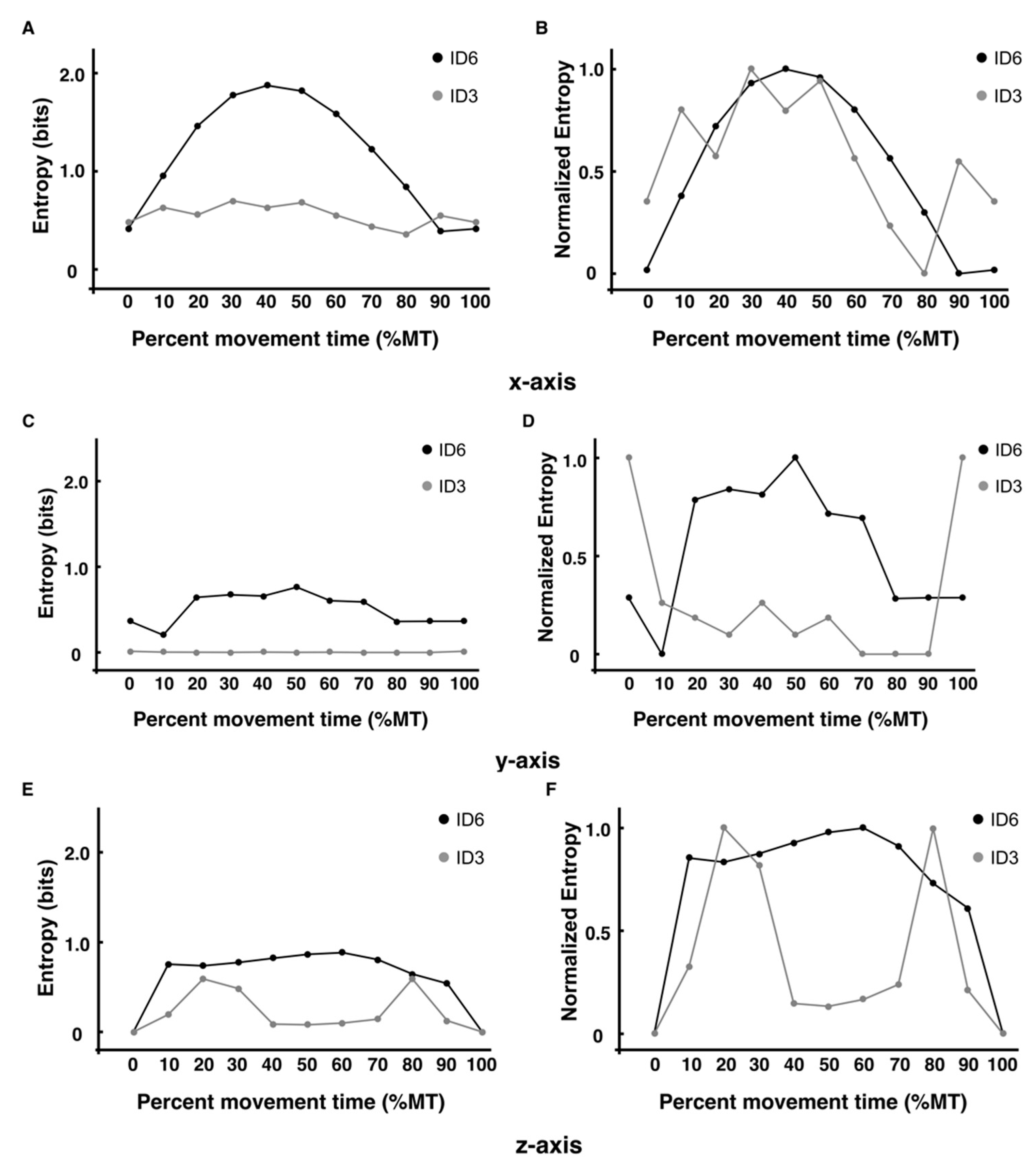
x-axis coordinates in ID6 increased from the beginning of the trajectory (0% MT), reached a maximum at the midpoint (40% MT and 50% MT), and then decreased toward the end (100% MT). The structure of this entropy change corresponds to the velocity profile in
Figure 5A, where the average velocity peak point (44% MT) and entropy peak point (40% MT–50% MT) are nearly identical. This supports the results of previous studies, which indicated that movement velocity is a mediator of trajectory entropy [
10]. The decrease in the value of information entropy in the latter half of the trajectory may be related to feedback control of limb movements [
22]. Previous studies have analyzed the time up to the velocity peak as the feedforward in the initial impulse phase and the time from the velocity peak to the target as feedback in the current control phase [
17,
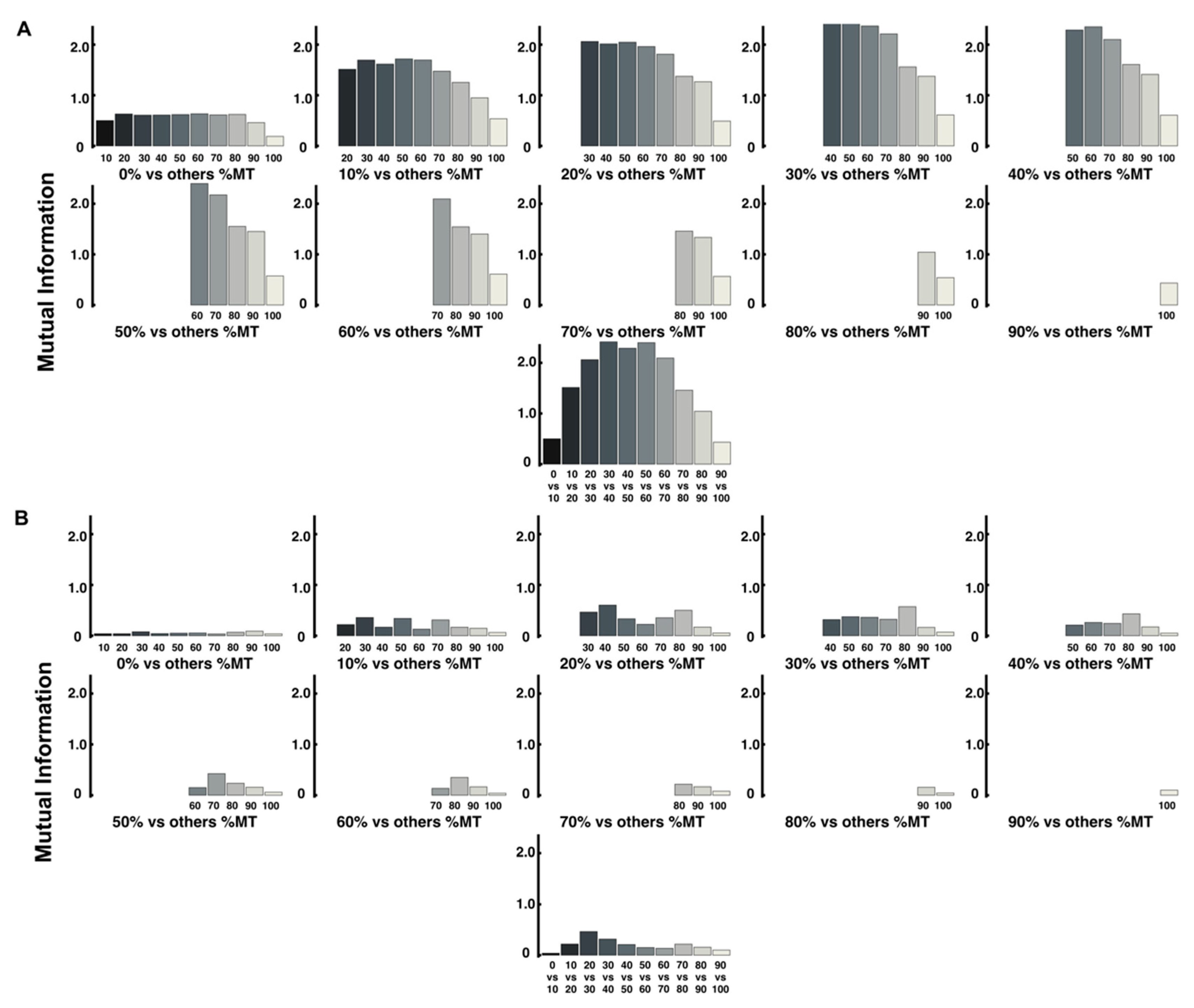
22]. Therefore, from the velocity peak, which is the point where the information entropy reaches its maximum, feedback control is initiated toward the target endpoint, which may have decreased entropy. Furthermore, the onset of peak deceleration in ID6 occurred on average at 66% of the trajectory, and the entropy value also decreased significantly from the 70% point toward the target (100% MT) (
Figure 6A,B). This trend was similar to the results of our previous study [
12], wherein the variability of trajectories toward the target (60–100% MT in this study) was quantified by principal component analysis. In other words, entropy may decrease significantly, particularly from the point where the acceleration reaches its extreme in the feedback control. This means that in addition to the results supporting the claim that changes in the value of information entropy are difficult to separate from the kinematic analysis of temporal changes in trajectory [
10], the analysis of changes in information entropy must consider the extreme value points of velocity and acceleration. Conversely, the entropy values obtained from the encoded methods and
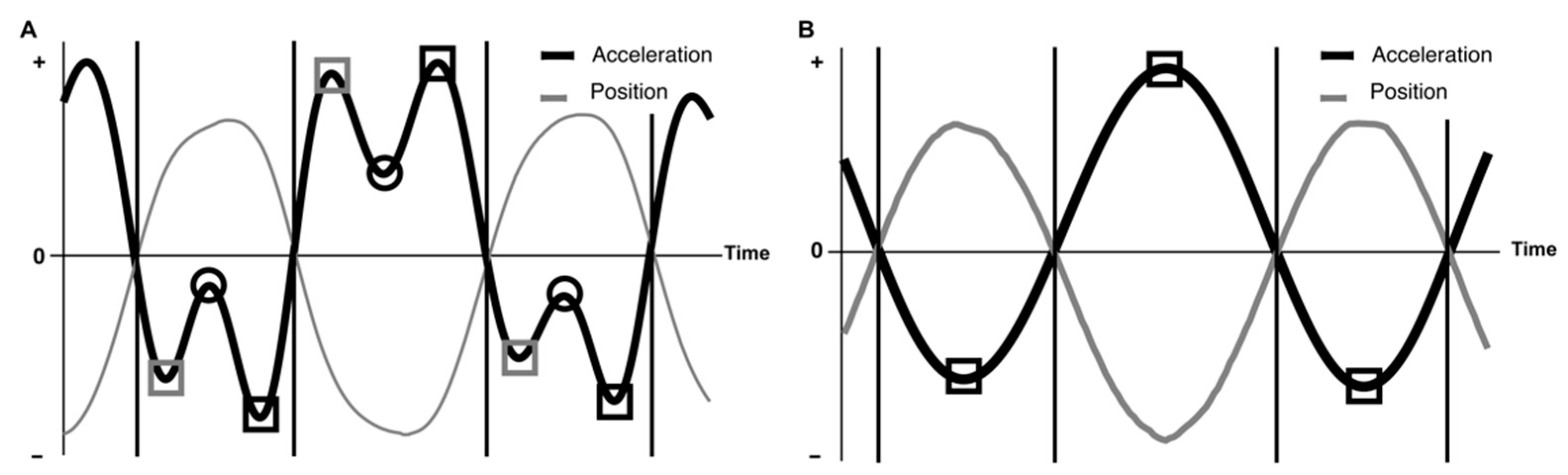
x-axis coordinates in ID3 did not change significantly from the beginning of the trajectory (0% MT) to the end (100% MT), with only minor fluctuations. Moreover, the structure of entropy changes in ID3 was not consistent with the velocity profile. At the peak velocity point (53% MT), the entropy value is lower than at any other point in time except for the start and endpoints. In contrast to ID6, the time-series waveform of the acceleration at ID3 was sinusoidal. This is consistent with the findings of previous studies observed under low-ID conditions [
23,
24,
25] and reveals that one extreme point (peak acceleration) is obtained per movement, which, on average, occurs in the early stages of the trajectory.
The values of entropy in the y- and z-axis directions did not change from values close to 0 from the beginning (0% MT) to the end (100% MT) of the trajectory for both ID6 and ID3, and the fluctuations were slight. The structure of change in the encoded entropy and the entropy in the x-axis direction were almost identical, indicating that the effect of the direction of movement is highly relevant to the effect of the variation at each time point. However, the value of entropy obtained by encoding three-dimensional coordinates is higher at each time point than the value of entropy obtained from coordinates along the x-axis. Therefore, rather than calculating the value of entropy separately for each axis, it is possible to provide more accurate values at each time point by considering a measure that includes information for all axes, suggesting that this may be a possibility. This is because it may ignore changes in other axes that have slight variations.
Mutual information analysis was performed to reveal the sequential interrelationships between the variables at two different time points [
10]. This estimate of mutual information complements the value of information entropy at different points in the trajectory [
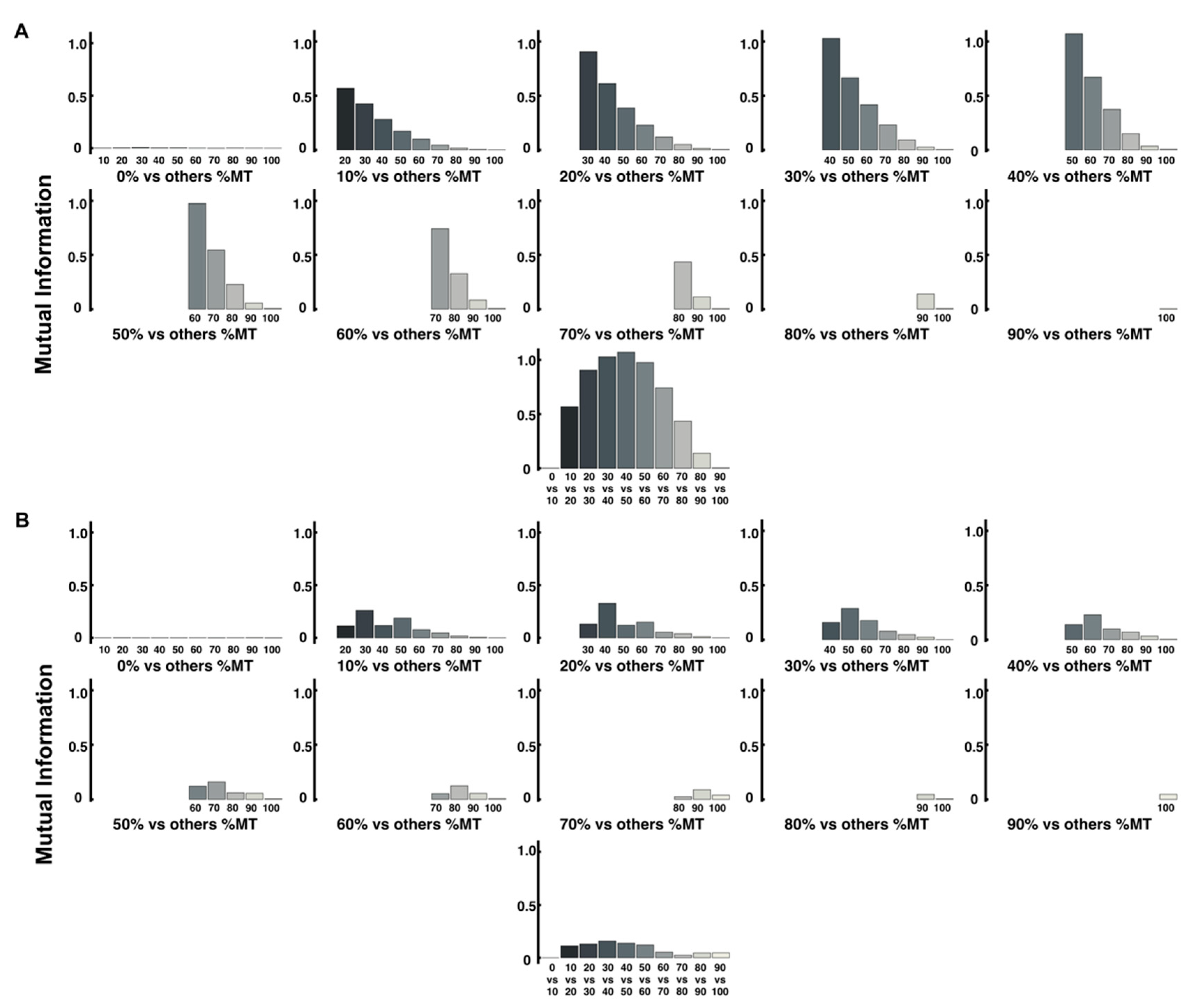
10]. In this study, this mutual information was calculated using two methods, including information entropy. Further, the overall value was higher for ID6 than for ID3, which may reflect the predetermined ID of the task. This trend was observed in both analyses using both methods. However, as in the analysis of information entropy, the value of mutual information calculated from the value of the encoded method is higher than that of the other method. This suggests that a similar examination of a measure containing information on all axes may provide a more accurate amount of mutual information. A comparison of adjacent time points in
Figure 8 and
Figure 9 also reveals that the structure is similar to the pattern of change in information entropy in ID6. It has been suggested that just as the extremes of velocity and acceleration are related to changes in the value of information entropy, they may also be related to changes in the amount of mutual information [
10]. However, the fact that the mutual information of the two adjacent time points in ID6 is higher at the midpoint of the trajectory (30–60% time points) and lower at the first and second half time points (0–30% and 60–100% time points) is probably because it depends on the magnitude of the probability value at a single time point. Specifically, since the information entropy at 0% and 100% time points is small, it is natural that the mutual information, including these points, is small. Conversely, in ID3, where the entropy values at each time point are low, the mutual information is low overall. We consider that this is not a problem in terms of analysis when discussing differences in the amount of information between IDs, but it is detrimental when discussing from which point the information processing took place within the same ID. When we compare two time points, mutual information may have the same value regardless of whether the uncertainty is decreasing (from a large value of entropy to a small value) or not (from a small value of entropy to a large value). Therefore, we consider relative information processing of ID6 by determining the ratio of the amount of information shared by two adjacent time points (mutual information) to the amount of entropy at a later time point. For example, if one wants to determine the percentage of mutual information between the 90% and 100% time points in the entropy at 100%, the equation is
.
The results of this analysis are shown in
Figure 10 for the values of the encoded methods analyzed, with ID6 having a ratio of more than 0.5 the 10–20% MT point, indicating a higher percentage of mutual information in the entropy at later points in time. From this analysis, we considered the possibility of estimating information processing independent of the magnitude of entropy at each time point. In other words, information processing to reduce uncertainty occurred in ID6 from the time of peak acceleration until the target was reached [
12]. This result further extends the possibility of information processing for trajectories, focusing only on the second half of the trajectory of our previous results, suggesting that information processing takes place from the first half of the trajectory.
Furthermore, similar to the results of previous studies [
9,
10], the peak value of the information entropy obtained at each time point in this study was less than the ID theoretically estimated by Fitts [
1] based on the target width and distance. This suggests a limitation of Fitts’ approach, determined by the assumed structure of the data distribution and the a priori defined average information given the claims of previous studies, and suggests that estimates of information entropy based on experimentally obtained data may have been more accurately measured [
9,
10]. However, we must be careful when comparing our method with the information estimated by Fitts because we modified the following two points from Fitts’ original experiment to define the endpoint size for the calculation of entropy in a straightforward manner. First, we controlled the error rate to 0% from the method of our previous study. Fitts’ experiment assumed that the distribution of target endpoints follows a Gaussian distribution; therefore, he specified the width of the target by allowing for an error of approximately 4% [
1,
26]. In this study, no errors were made from the target. However, if experiments were to be conducted in an error-prone environment, the value of information entropy at the target point would be larger. Secondly, the target has no length in the
y-axis direction; Fitts [
1] used a
y-axis length of 6 inches. This means that Fitts’ experiment allowed more target point redundancy than the present study. When experiments are conducted in such an environment, the value of the information entropy at the target point is expected to be larger, and a new rule for the size to be encoded, which was used in the analysis of this study, should be considered. In the future, it will be necessary to examine the generality of various participants and changing conditions.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









