1. Introduction
High efficiency, low cost, and low maintenance make up some of the main features of induction motors (IM) that make them the preferred machine type in the industry. For this reason, early fault detection becomes critical to schedule maintenance and prevent further damage to the motor [
1].
Various factors can produce a fault in an IM, such as manufacturing defects, corrosion, overloading, and overheating [
2]. The most common damages in IMs are related to bearing faults, stator faults, and broken rotor bar faults [
3,
4]. Among these, the broken bar damages are the most difficult to detect because this condition does not show any effect on the motor at the early stages of the fault.
Suppose the broken bar damage is not conveniently detected and treated. In that case, the unbalanced currents flowing through the rest of the rotor bars lead to thermal and mechanical stresses that may conduct the IM to complete failure. Moreover, this condition affects the operative cost of the machine, considering that this type of fault can significantly increase power consumption.
To achieve a convenient detection of broken bars, diverse techniques have been studied in recent years; some of them are based on vibration signals, some others on current analysis, and magnetic flux, among others [
5,
6,
7,
8,
9,
10,
11]. For example, Morales-Perez et al. [
5] explored the use of trained dictionaries to decompose vibration signals using the orthogonal matching pursuit algorithm. Panagiotou et al. [
6] proposed the detection of broken rotor bars at steady state by analyzing stray flux signals. Garcia-Calva et al. [
8] analyzed the speed signature of a faulted motor in the time-frequency domain. Overall, motor current signature analysis (MCSA) is widely used because current signals acquisition does not require additional sensors in the IM.
Previous works have studied the broken bar problem using MCSA, relying on traditional methods such as the fast Fourier transform (FFT) or the wavelet transform. For instance, da Costa et al. [
12] used two diagnostic methods based on the FFT and Wavelet Transform, to compare them. García-Perez et al. [
13] employed the multiple signal classification (MUSIC) method applied to current and vibration signals to identify multiple faults. Trujillo-Guardado et al. [
14] proposed an algorithm for broken bar detection hinged on the use of two Taylor-Kalman filters in cascade.
For classification purposes, most of the recent works use artificial intelligence (AI) methods: Support vector machines (SVM), artificial neural networks (ANN), and convolutional neural networks, among others. For instance, Reljic et al. [
15] introduced ANN and SVM to perform broken bar detection. Xiao et al. [
16] utilized a recurrence quantification analysis and long short-term memory neural network to detect different faults in the IM. Valtierra-Rodriguez et al. [
17] proposed using convolutional neural networks to detect broken rotor bars automatically. Kumar and Hati et al. [
18] employed a dilated convolutional neural network model to detect bearing and broken rotor faults based on vibration signals. These techniques have proven high accuracy, but their main drawback is the high computational resources required for their use, which may be difficult to implement for monitoring purposes. Moreover, even with the use of AI techniques, most recent works are able to detect no less than half-broken bars.
Aiming to improve the detection rate without consuming large computational resources or requiring long computational times, the Taylor–Fourier Transform (TFT) emerges as a good option for signal processing based on its excellent filtering characteristics. In general terms, the TFT is an expansion of the Fourier subspace given by the modulation of each Fourier harmonic by a Taylor polynomial of order
K greater than zero. The TFT has been mainly applied to power systems monitoring, and oscillatory signals analysis [
19,
20]. This transform delivers dynamic phasor estimation, which opens the possibility of working with transitory signals. Applying the TFT to a current signal offers the possibility to estimate mainly but not only the amplitude and phase of the signal. On the other hand, the O-splines implementation of the TFT considerably reduces the computation resources required for signal processing.
In this paper, MCSA for broken bar fault classification is implemented using Taylor–Fourier filters and taking advantage of the processing facilities given by the use of the O-splines. The feature extraction is performed based on the amplitude estimation given by the TFT. Finally, an analysis of variance is performed on each distribution to detect the damage using the Tukey procedure.
This paper is organized as follows. In
Section 2, fundamentals of the TFT and its O-splines are presented, as well as the basis for MCSA and statistical analysis. Then, the proposed methodology for broken bar fault classification is given in
Section 3. Results are presented in
Section 4, and finally, conclusions are given in
Section 5.
3. Proposed Methodology
The diagram of
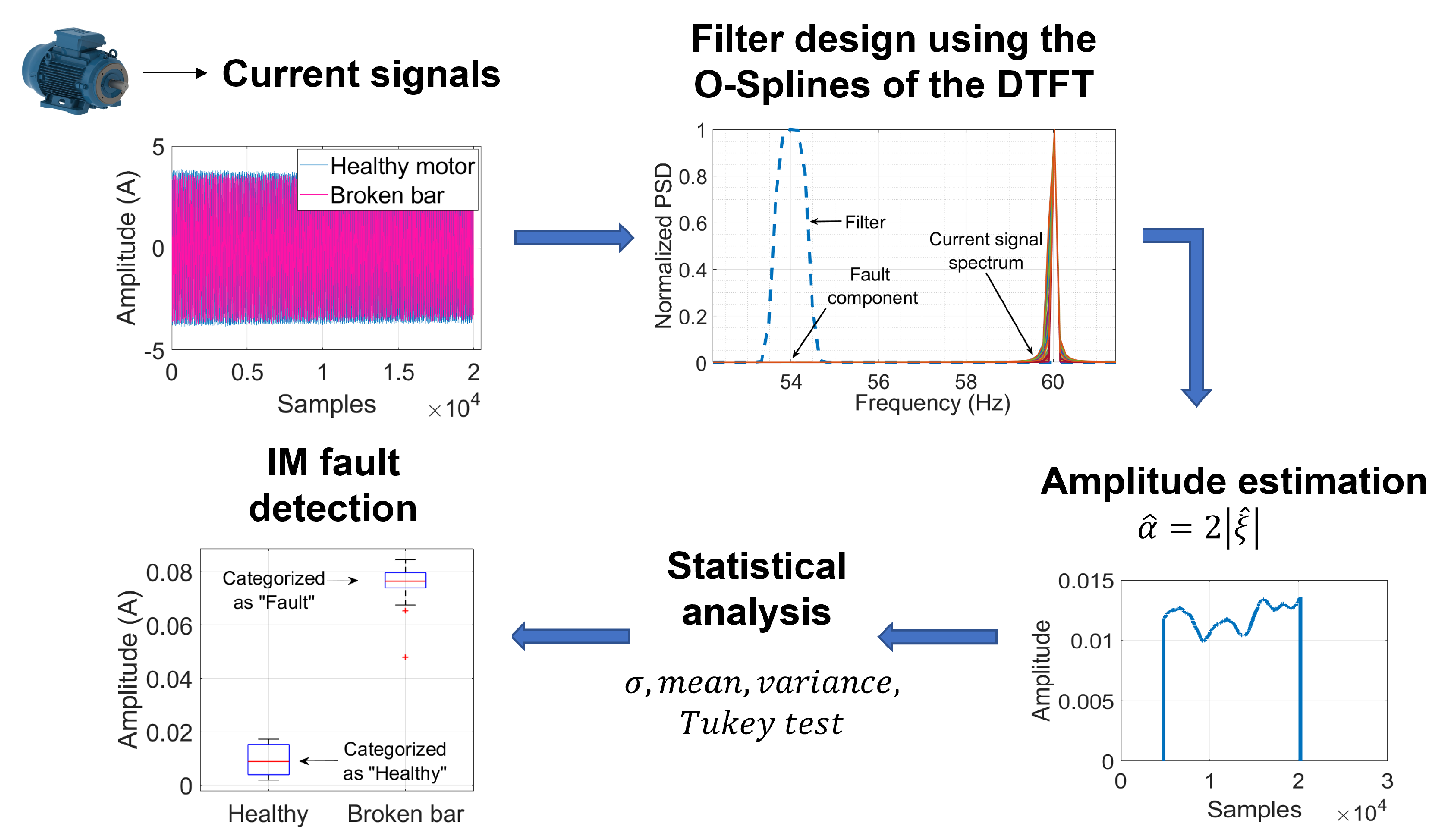
Figure 1 illustrates the steps that structure the proposed methodology for broken bar detection using the DTFT. First, current signals for different health conditions of the motor need to be acquired. Then, the characteristics of the Taylor–Fourier filters can be selected to perform an amplitude estimation in a frequency of interest. Afterward, a statistical analysis is performed over each group of amplitude estimations. Then the variance analysis is carried out. Hence, discrimination between healthy and damaged rotor bars can be conducted, resulting in the detection of the fault. Next, each process is explained.
3.1. Current Signals
These signals are associated with different damage levels in the rotor bar. Typically, the analysis is focused on one broken bar, half broken bar, and so on; the healthy motor signal also needs to be acquired. These signals do not require any pre-processing and are analyzed according to the sampling frequency at which they were acquired.
In the presence of a level of damage in the bars, spurious components typically appear around the fundamental frequency and its harmonics, as stated by the theory in
Section 2.3. According to this expected location of the fault component, the central frequency
of the filter is selected.
3.2. Filter Design
The design’s parameters need to be selected according to the characteristics of the current signal. The first important parameter is the central frequency , which is selected in the estimated location of the fault to prevent any attenuation of the signal.
Another important feature is the bandwidth of the filter , which should be selected in a way that the undesirable energy peaks in the analysis are not considered. For example, a bandwidth narrow enough for analyzing a spurious component related to a broken bar fault will let out the energy of the supply frequency. In this way, the filtered signal will preserve only the features of the faulty component.
Finally, the number of Taylor polynomials (
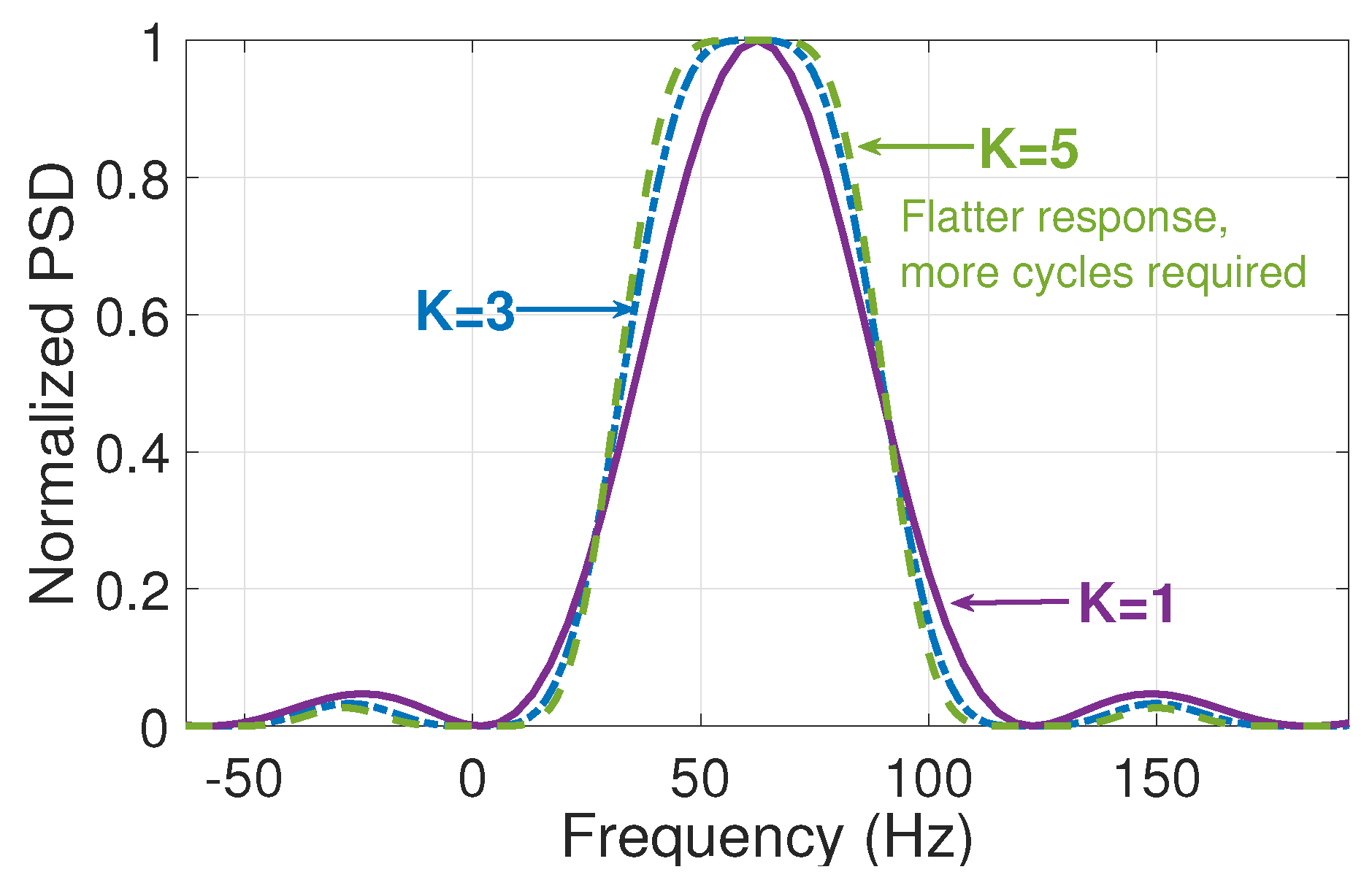
K) is another important design parameter, considering that as this number increases, it is necessary to analyze more windows in the time domain. Still, at the same time, the filter response around the frequency of interest tends to be flatter and, therefore, more likely to be an ideal filter [
29]. As can be observed from the normalized power spectral density (PSD) in
Figure 2, the filter corresponding to
presents a flatter response and better harmonic rejection than, for example, the one with
, Nonetheless, the first one requires more cycles of the signal to implement it.
Once the filter is designed, a sliding window process of size is performed on the signal, and a single value is taken at the center of each window, forming the filtered signal. It is important to consider that the filtering results will have a delay corresponding to half of the number of cycles C required for the analysis; remember that this is given by selecting the value of K.
3.3. Amplitude Estimation
After the filtering process, the amplitude estimation can be obtained using (
9). A single amplitude value is taken at each processed signal, forming a vector of size
M, where
M is the number of measurements for a certain case of damage in the bar.
3.4. Statistical Analysis
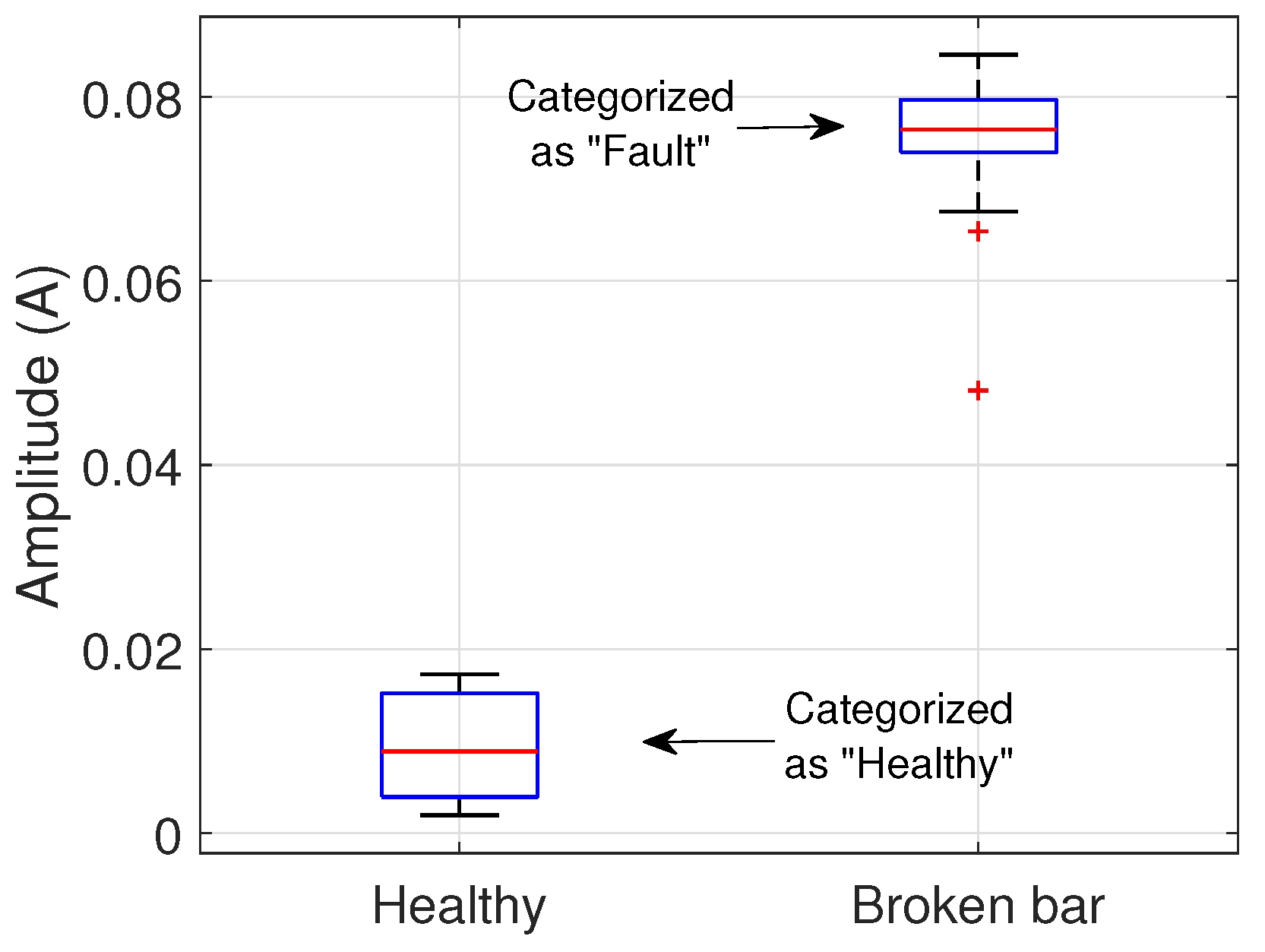
The variance analysis is performed, and if the null hypothesis is successfully rejected, the Tukey procedure is applied to detect the damage in the rotor’s bar. This can be achieved if the damaged groups differ significantly from the healthy group. An exaggeration of the expected behavior of the groups is depicted in
Figure 3, where the broken bar induces components that grow in amplitude according to the severity of the damage; the depicted distributions fulfill the 3 standard deviations (
) criteria of the Chebyshev theorem.
4. Experimental Results
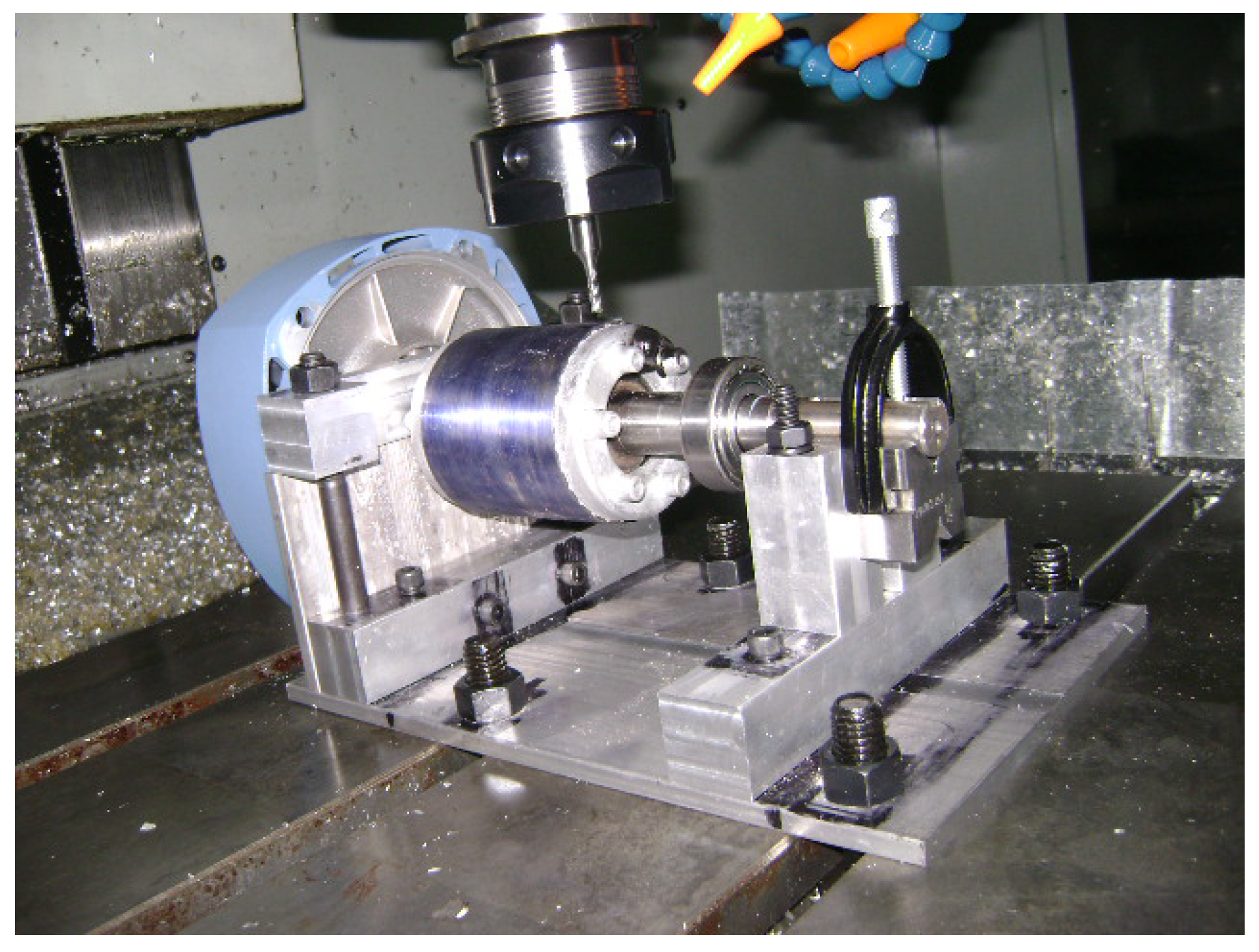
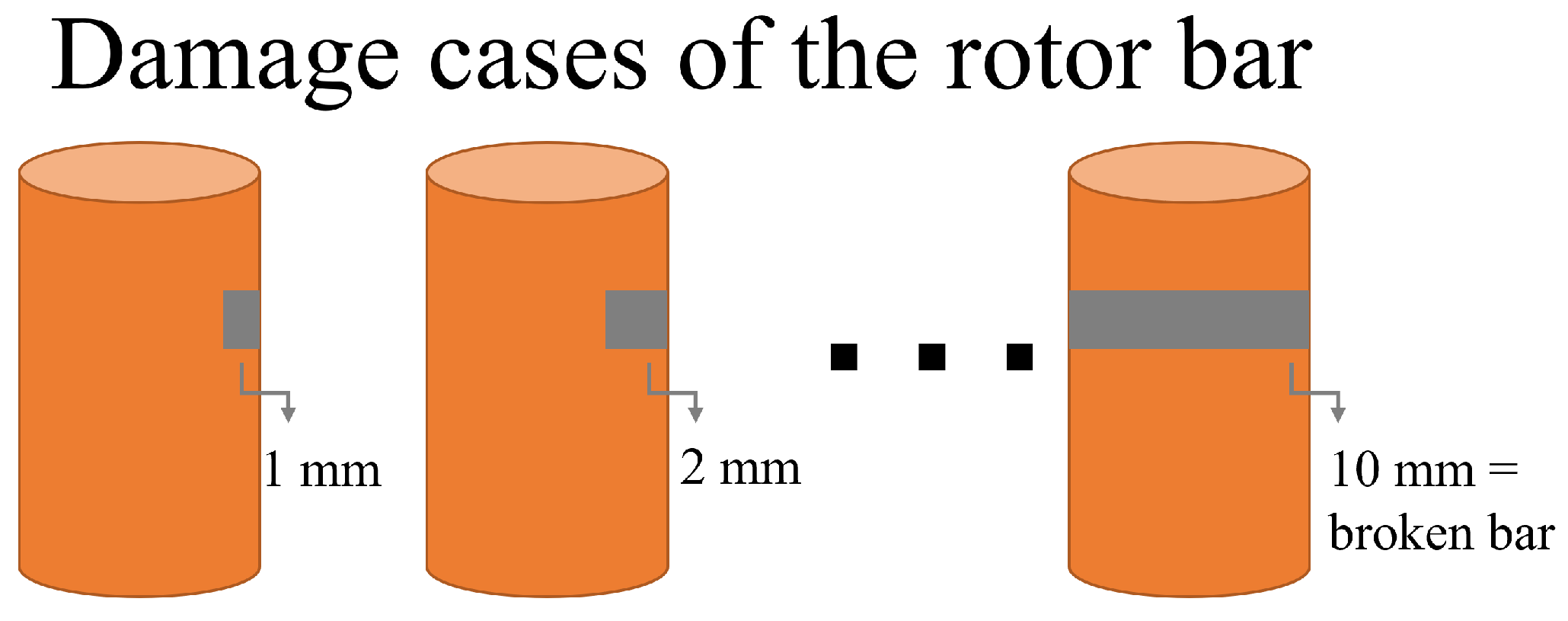
This work analyzed 10 different damage levels for an IM operating under load conditions of 75% and 50%. Each damage level was artificially created by drilling a hole in the bar, as can be observed in
Figure 4, starting from 1 mm hole perforation and increasing by 1 mm until reaching a completely broken bar, as illustrated in
Figure 5. The experimental test was carried out through a three-phase IM WEG 00118ET3EM143TW, 1HP, 1800RPM, 220 VAC/60 Hz, and 2.98 A; the data was acquired at a sampling frequency of 3200 Hz. For each case of damage, 50 steady-state current measurements were analyzed in this work. For the ANOVA, a significance level of
was selected.
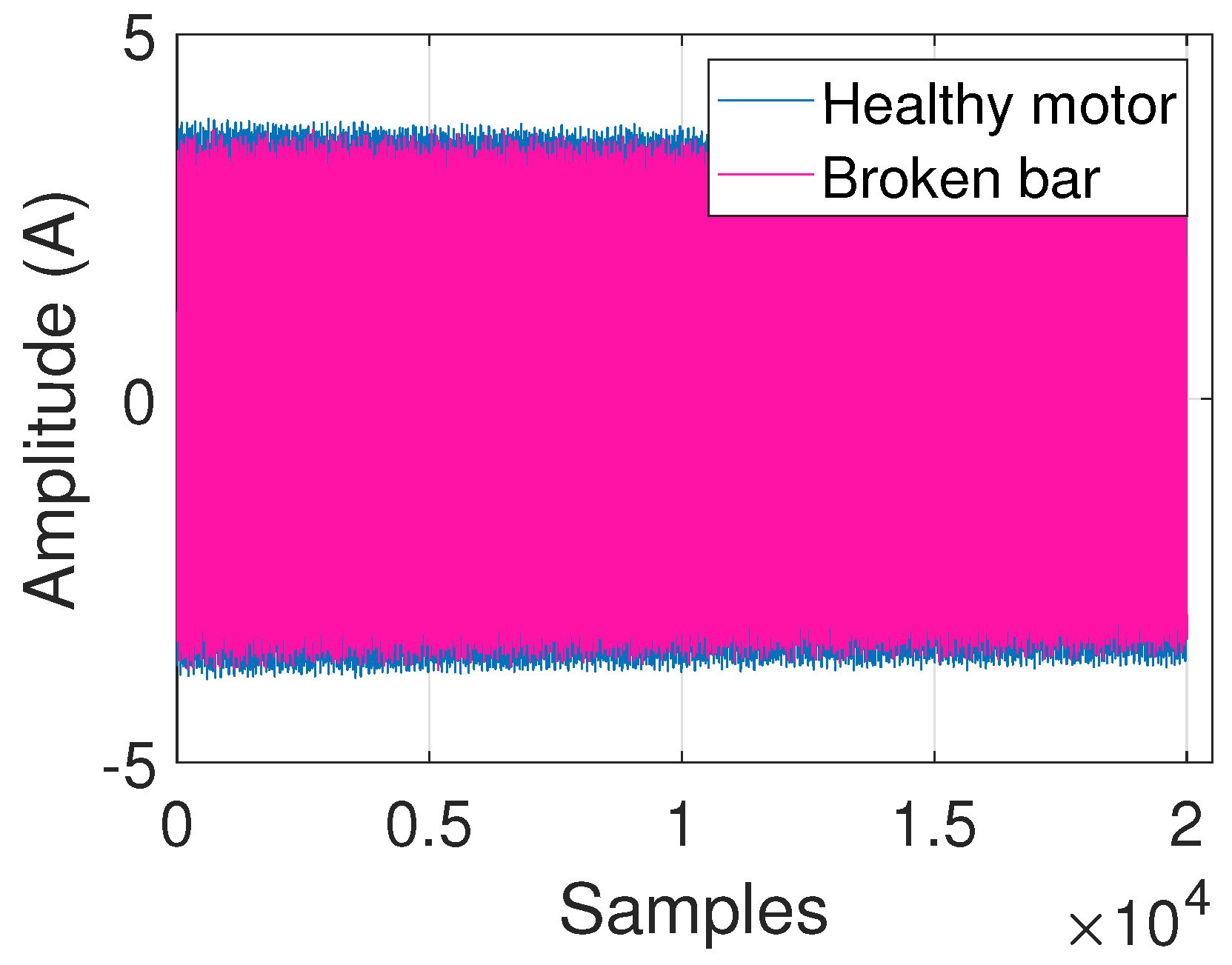
Current signals of the healthy motor and broken bar IM illustrated in
Figure 6 show that the effect of this fault is hardly noticeable in the time domain. Thus, the analysis is focused on its frequency spectrum.
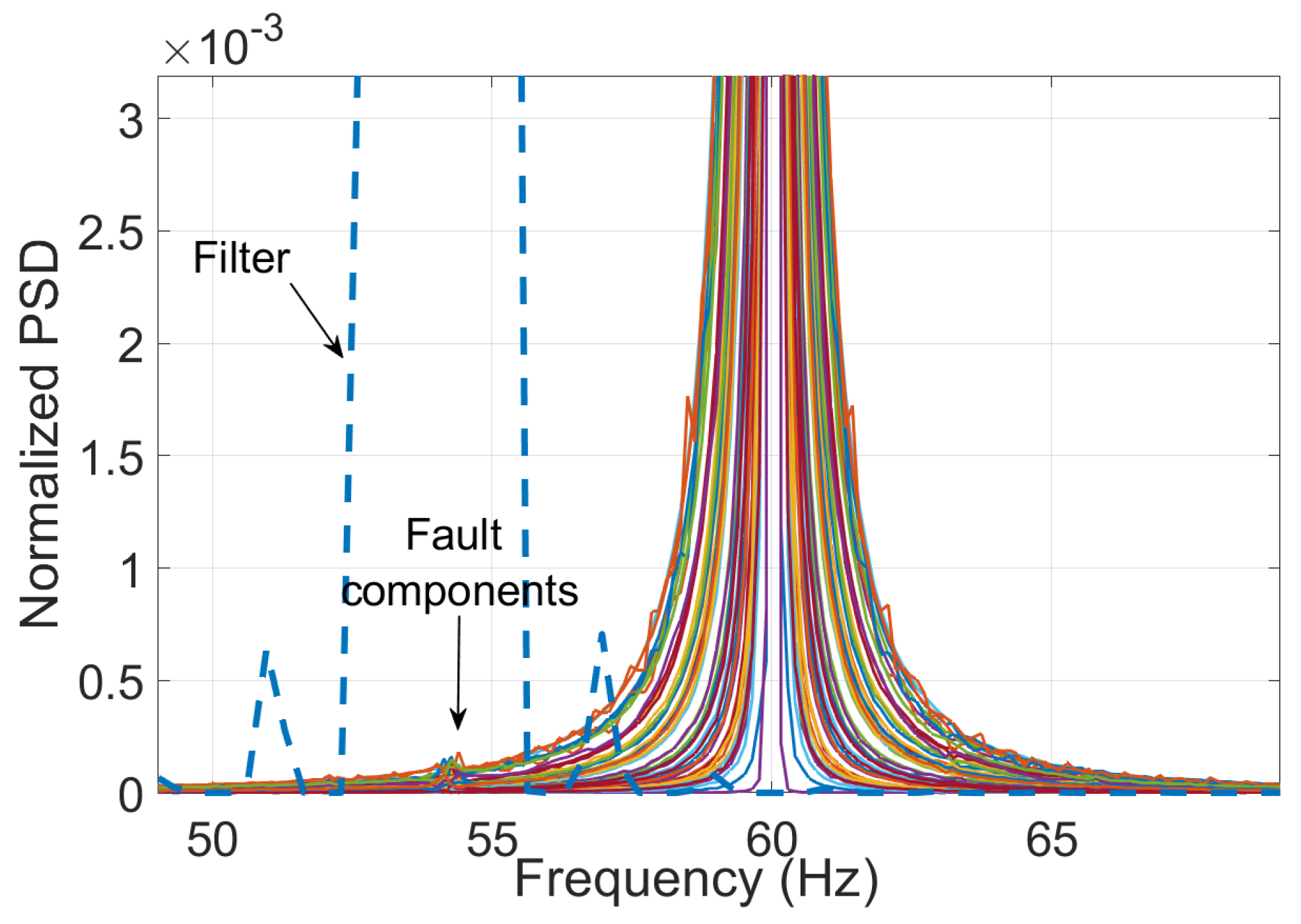
Figure 7 depicts the frequency spectra of 50 signals corresponding to a half-broken bar condition. Fault-related components were identified around 54 Hz. Thereby, the central frequency
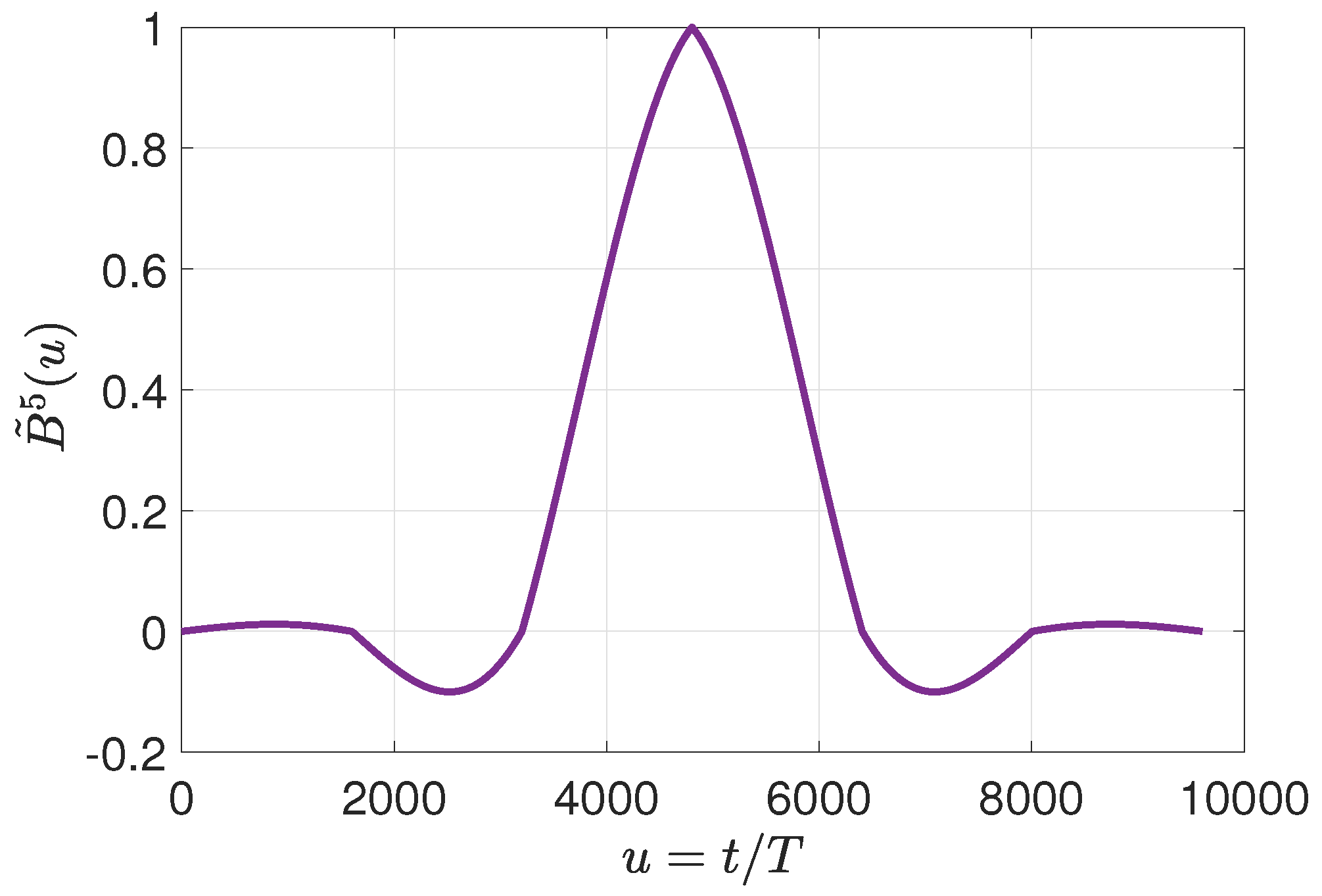
of the filter was selected accordingly. Continuing with the parameters for the filter design, a value of
was selected for all study cases, given that the filter response is flatter enough without requiring larger segments of the signal for the analysis. This selection implies a delay in the results of 3 cycles of the signal sampled at 3200 Hz. Then, the associated O-spline is depicted in
Figure 8.
It is worth noticing from
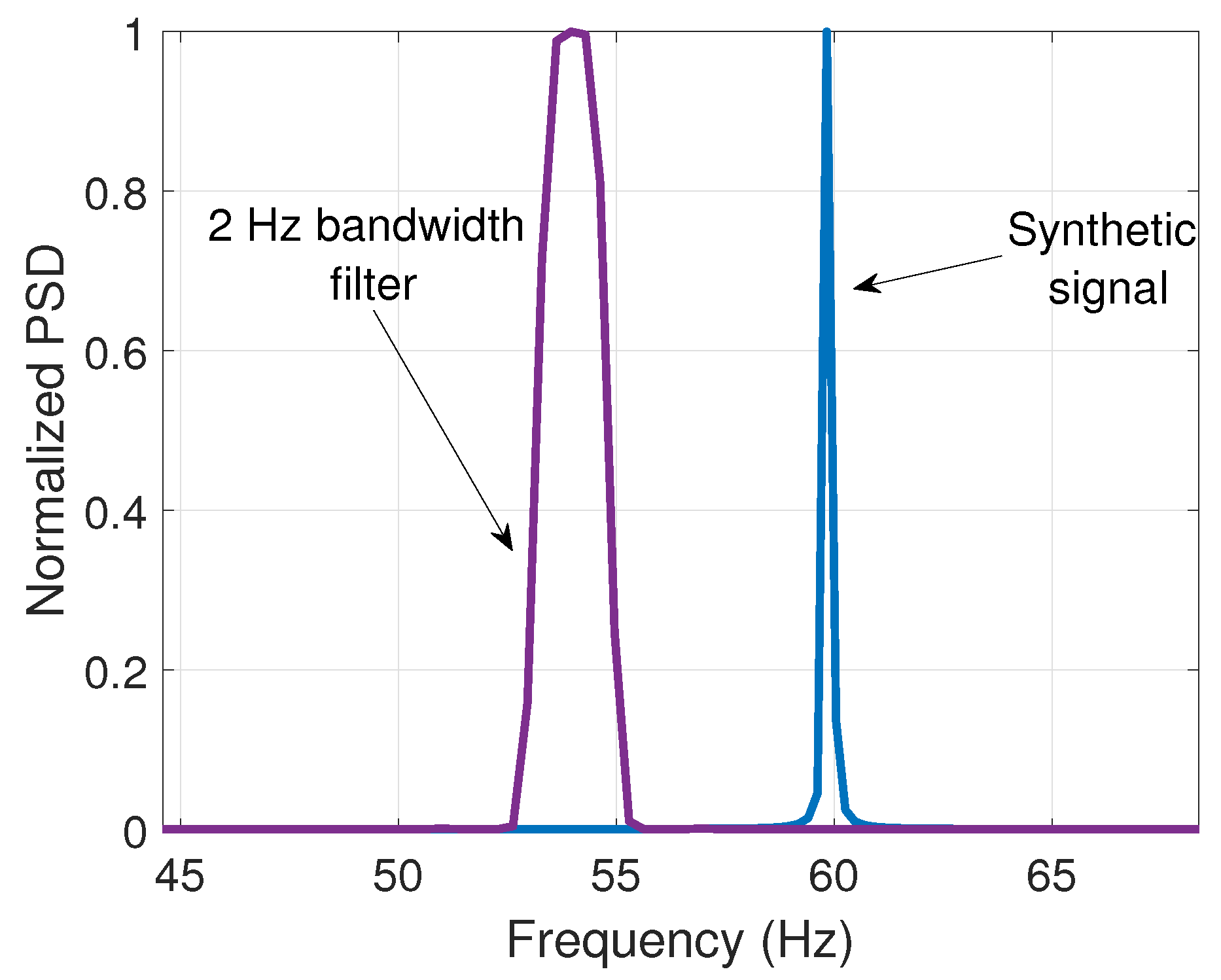
Figure 7 that the spurious component represents a very small part of the signal’s energy. Besides, it lies near the center frequency of 60 Hz. For this reason, a bandwidth of 2 Hz was selected for the filters to avoid including other components that are irrelevant to the analysis. To illustrate this,
Figure 9 shows the same 2 Hz bandwidth filter with a
54 Hz and the frequency spectrum of a synthetic 60 Hz signal to remark that the reduced bandwidth excludes the energy of the fundamental component.
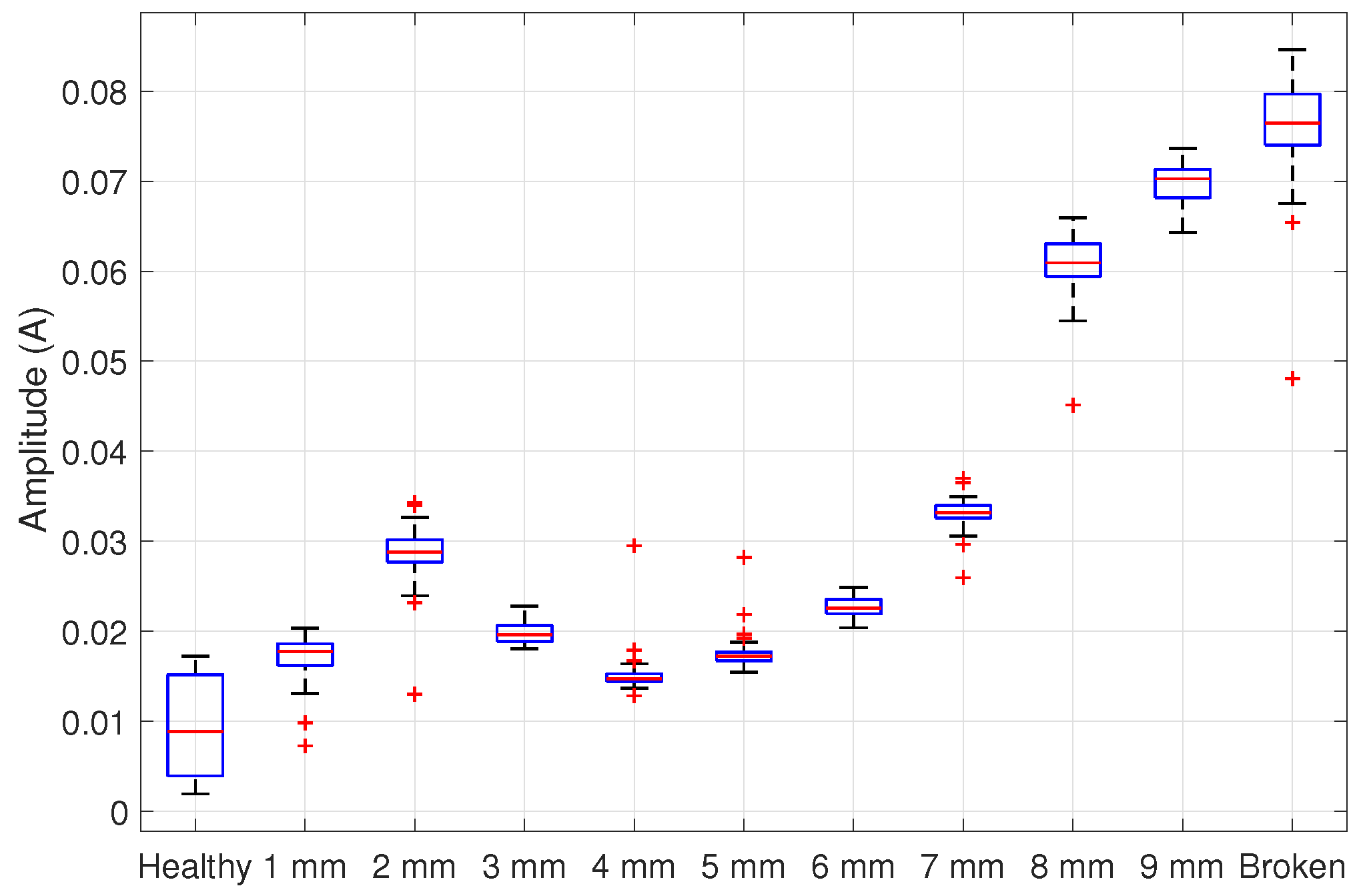
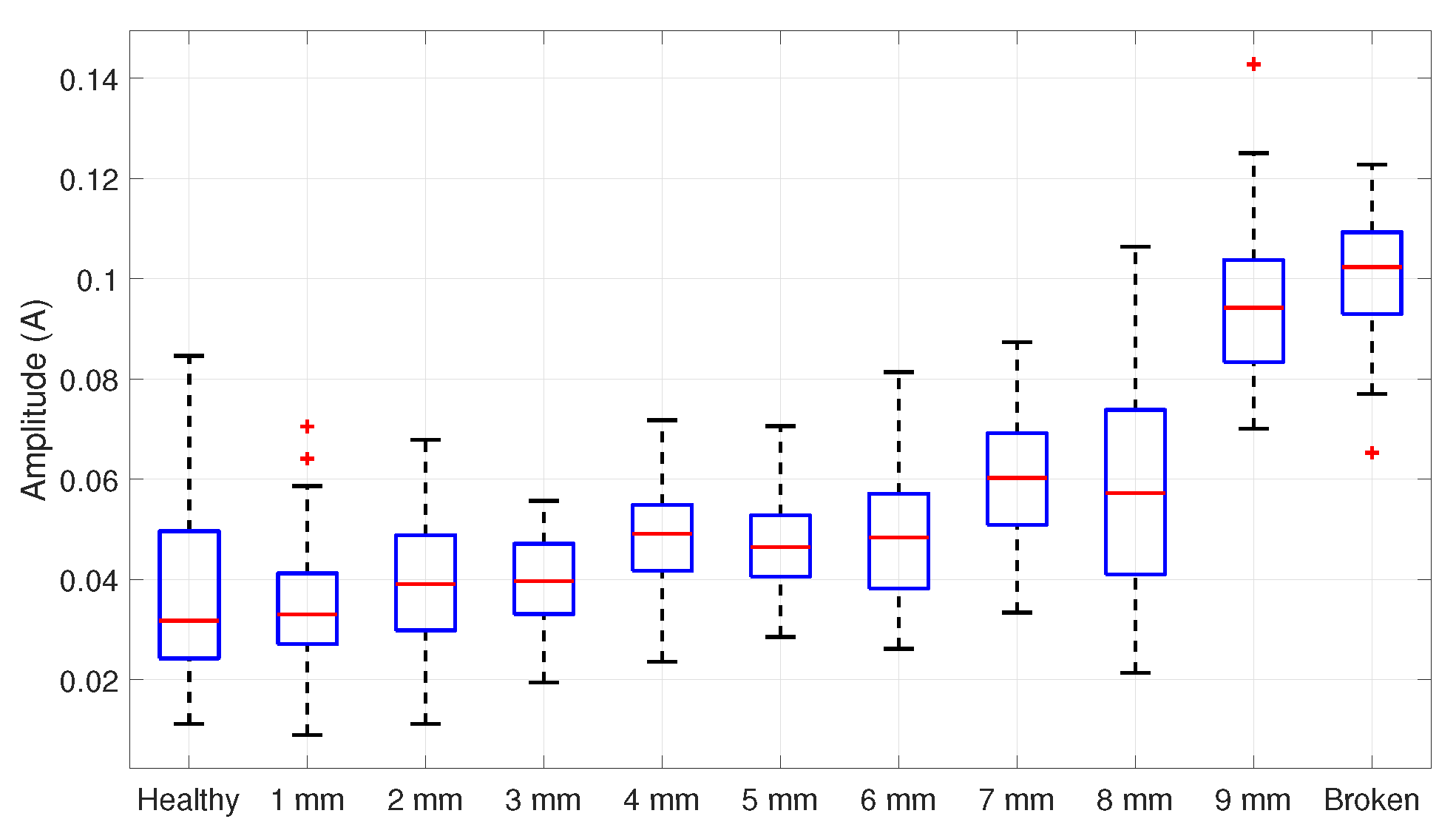
ANOVA results based on the amplitude estimations of
Figure 10 are given in
Table 1. The value of
p < 0.01 rejects the null hypothesis, allowing us to continue with the Tukey procedure.
On the other hand, the Tukey test results are summarized in
Table 2, suggesting that the detection is achieved when the broken bar is greater or equal to 1 mm, with a 99% of confidence level. Remember that the groups significantly differ when
.
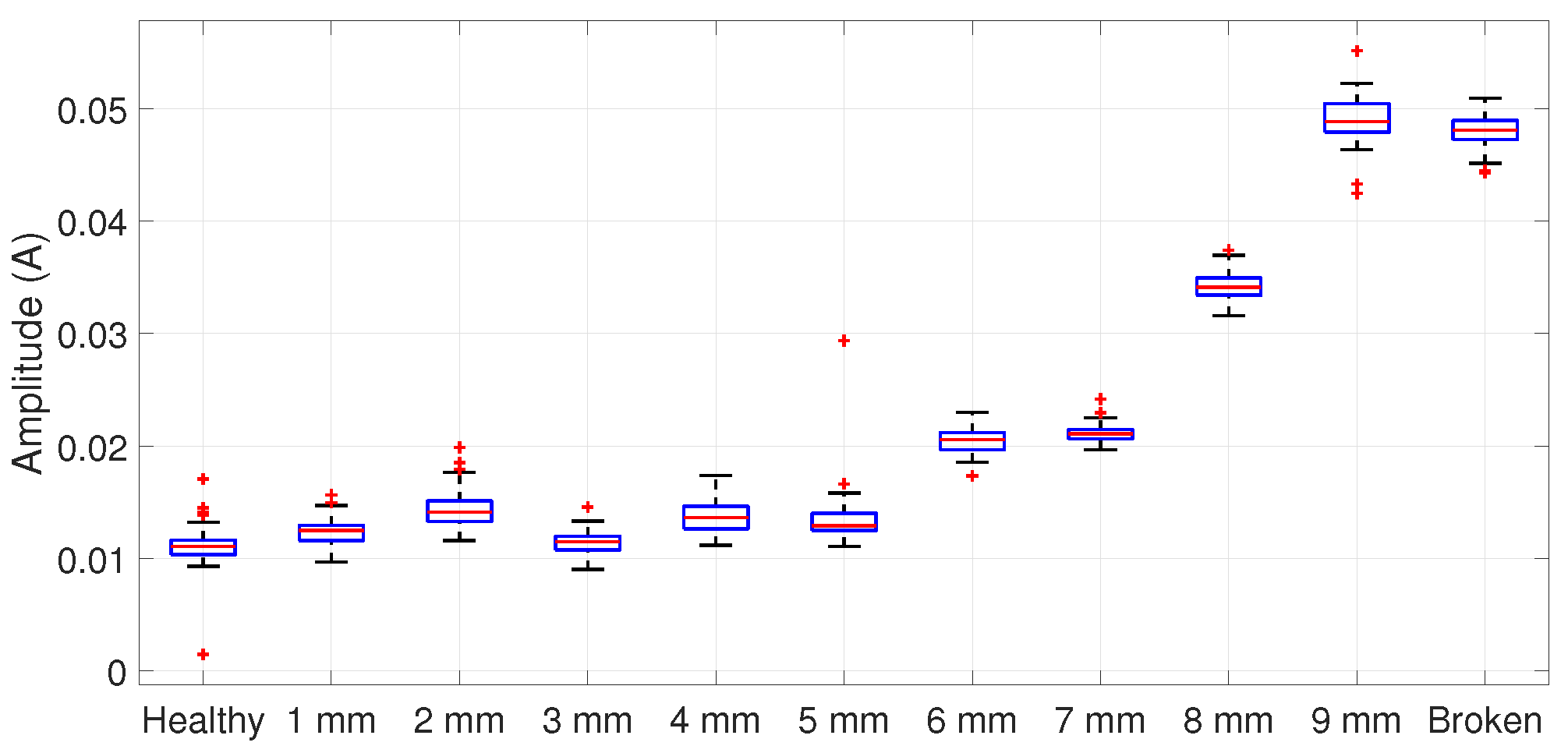
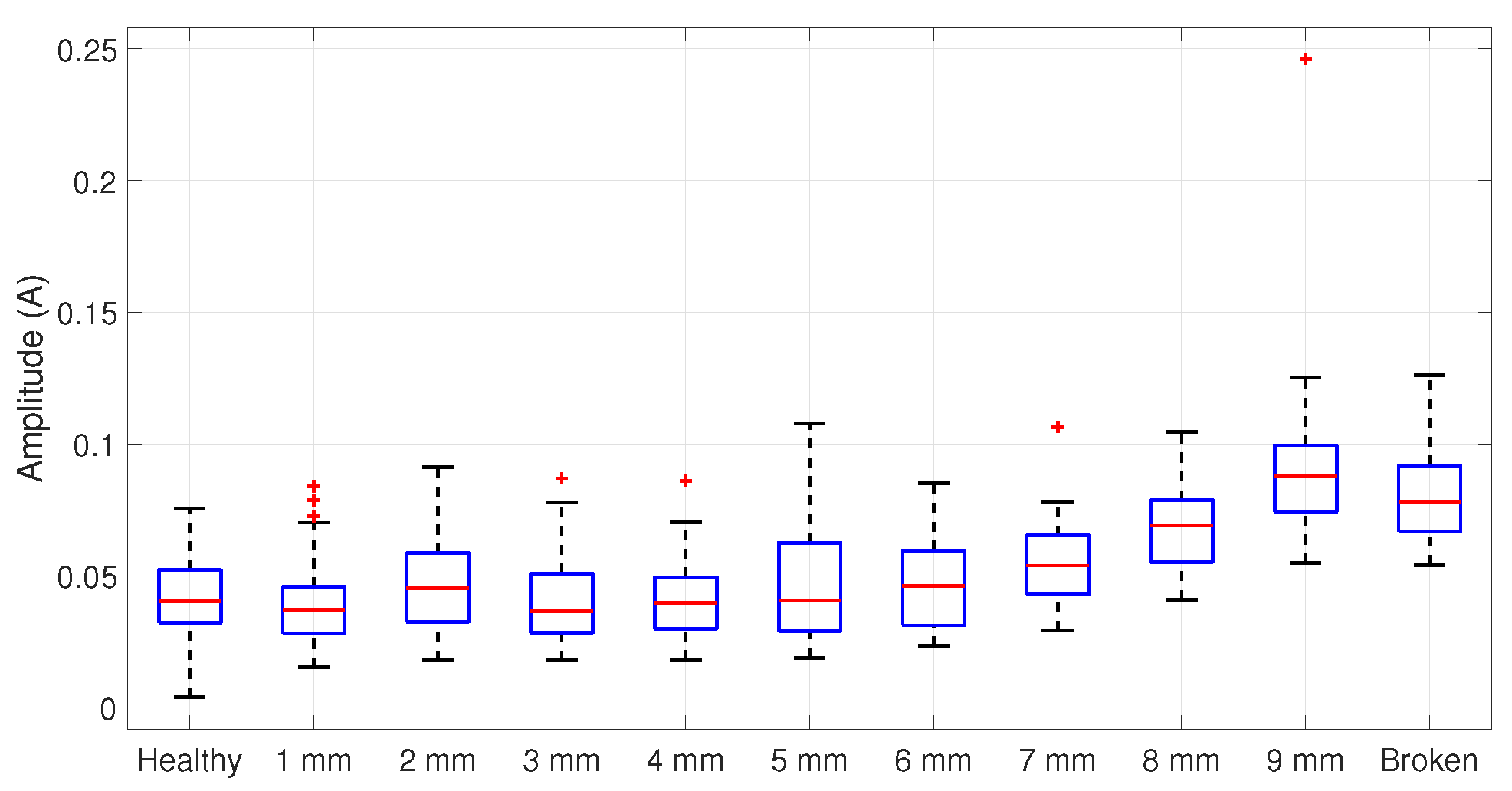
For a 50% load condition, the spurious component appears around 56 Hz; then, the filter is centered at this frequency, similar to the one presented in
Figure 7. The ANOVA is applied to the amplitude distributions in
Figure 11, resulting in
Table 3, which allows the rejection of
. Hence, the Tukey test results in an incipient detection starting at 1 mm, as summarized in
Table 4.
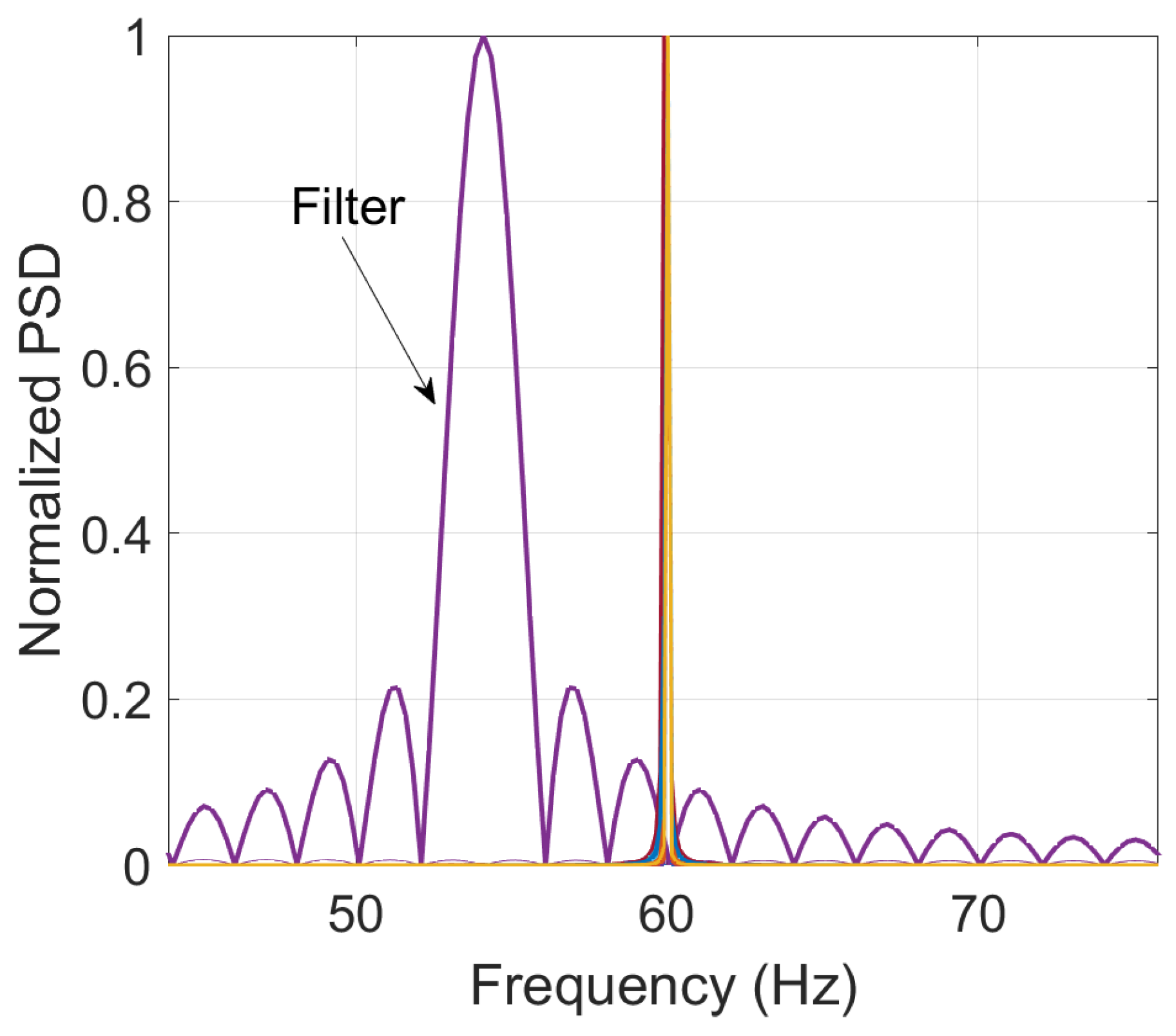
Comparison Using Fourier filters
To showcase the improvement using Taylor–Fourier filters, the proposed methodology is repeated but using a value of
, i.e., Fourier filters. As illustrated in
Figure 12, the filter exhibits a poor harmonic rejection, giving as a result, the inclusion of undesired energy in the analysis.
Results for the ANOVA based on the distributions of
Figure 13 and
Figure 14 are summarized in
Table 5 and
Table 6, respectively. Both cases pass the ANOVA (P
). Nevertheless, the Tukey test results in
Table 7 and
Table 8 reveal that the detection is achieved at higher damage levels than Taylor–Fourier filters. In the case of 75% of load, the start of the detection goes from 1 mm to 4 mm; meanwhile, for the 50% load condition, the detection decreases from 1 mm to 8 mm.
These results demonstrate that Taylor–Fourier filters effectively detect damages in the bars of the rotor at earlier stages.
5. Conclusions
A methodology for early IMs broken bar detection based on the DTFT was presented and demonstrated. A total of 1100 current signals were analyzed, considering scenarios going from a healthy bar to a broken bar. For both load conditions, the Tukey test allowed an incipient detection of 1 mm damage in the bar with a confidence level of 99%; for the 75% loaded motor, only the 3 mm case could not be detected. Although the median value for the 3 mm distribution is larger than that for the healthy bar, the data dispersion tends to have smaller amplitude values. This drawback can be attributed not to the 3 mm case but to the healthy bar distribution, whose current signals presented a slight damping that tends to increase its estimated amplitude. However, the signals were purposefully not preprocessed to assess the reach of the proposed method for early fault detection. Overall, it is considered that the DTFT implementation for current signal analysis was successfully carried out to perform early fault detection.
The use of the O-splines of the DTFT enabled smooth filtering without an increase in the processing time. This is an important advantage regarding future implementation in an FPGA. In addition, the estimated fault amplitude was the only feature used for detection, which is a straightforward calculation due to the use of the O-splines.
In future works, we are interested in extracting more features with the TFT, such as the phase of the signals, in performing a classification of the damage levels in the rotor bar. Besides, this system coded in Matlab will be traduced to its equivalent in a hardware description language (VHDL) to implement it in an FPGA, aiming to assess the system’s performance for an IM operating under real circumstances.



 and
and 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}