
Dynamic Strain Measurements on Automotive and Aeronautic Composite Components by Means of Embedded Fiber Bragg Grating Sensors


Abstract
:
1. Introduction
2. Fiber Bragg Grating as Sensing Devices and Their Application for Modal Parameter Estimation
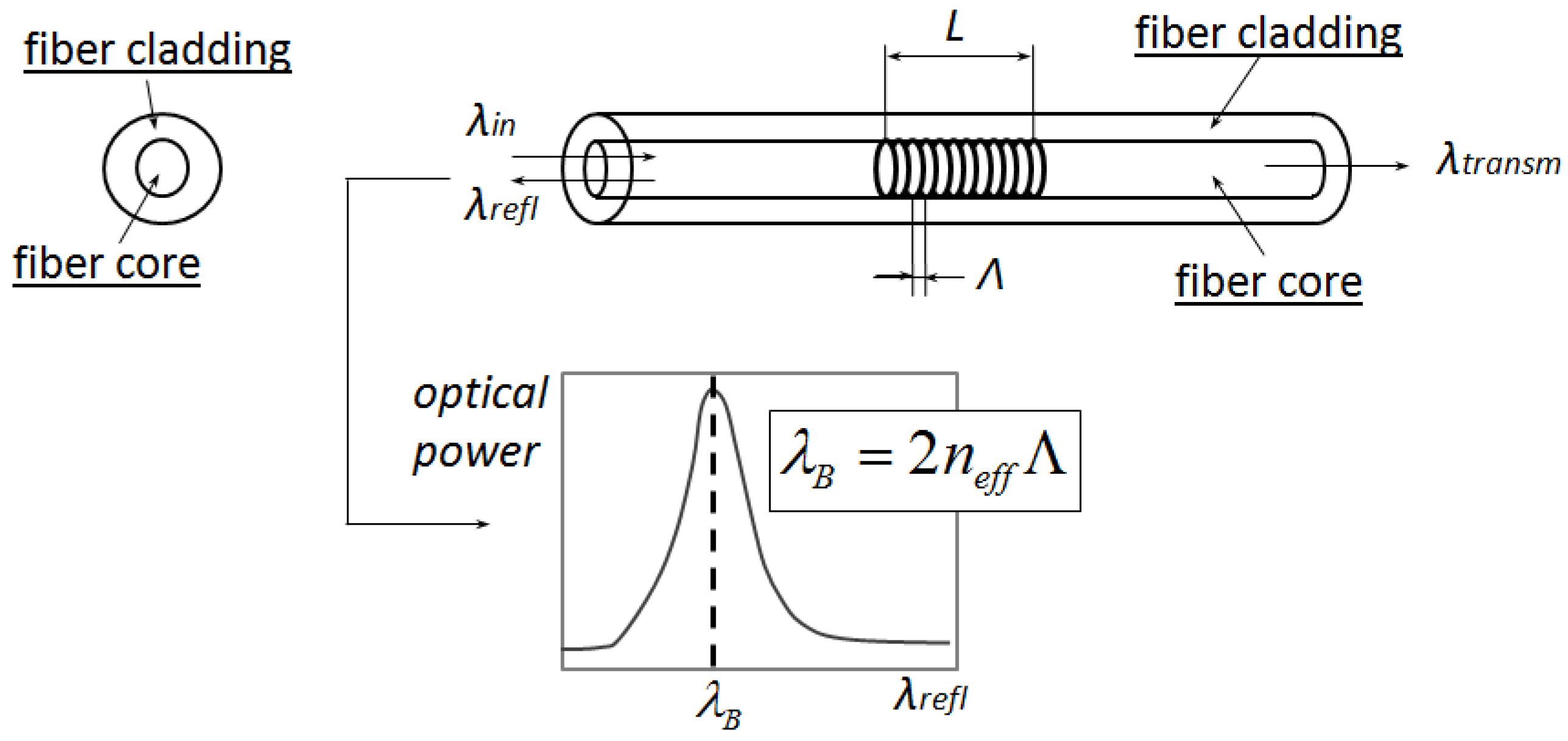
2.1. The FBG Working Principle

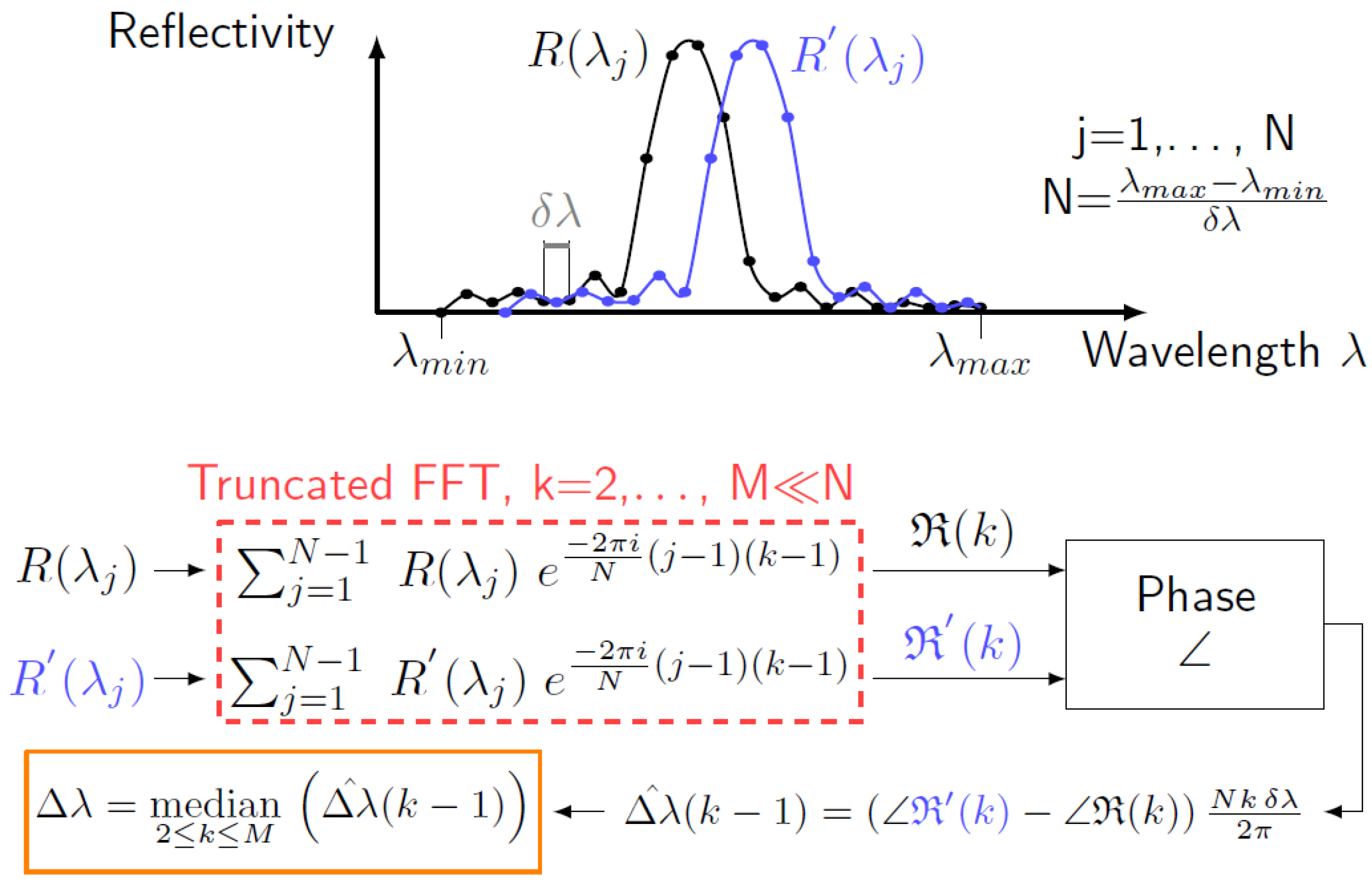
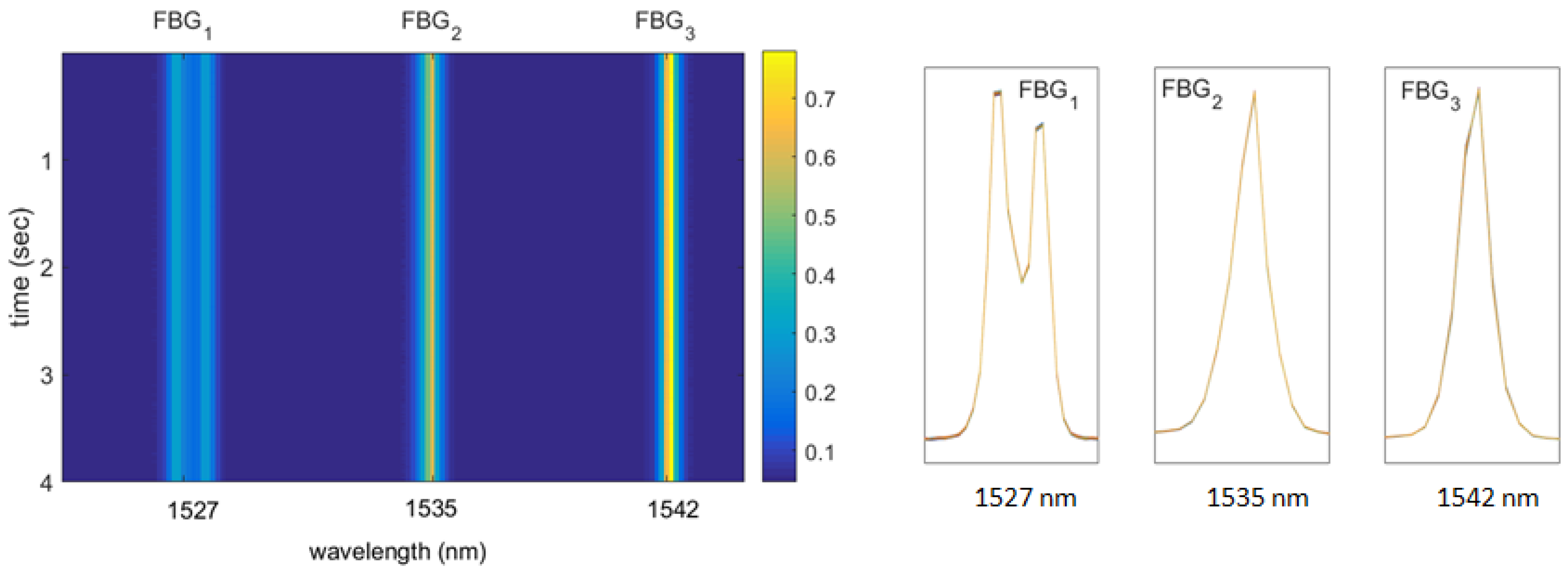
2.2. Demodulation of FBG Signals

2.3. Strain-Based Modal Analysis
3. Manufacturing of the Composite Components
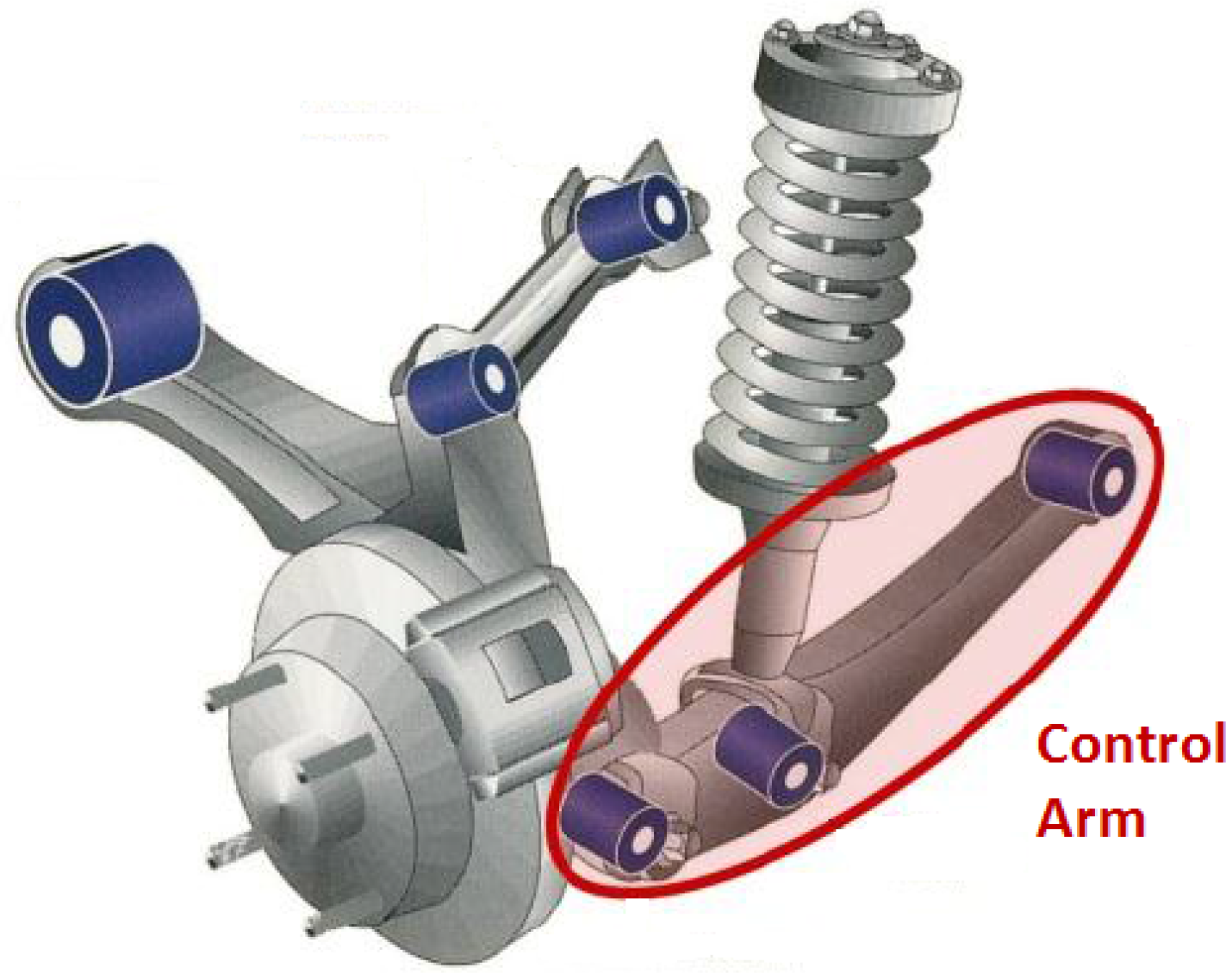
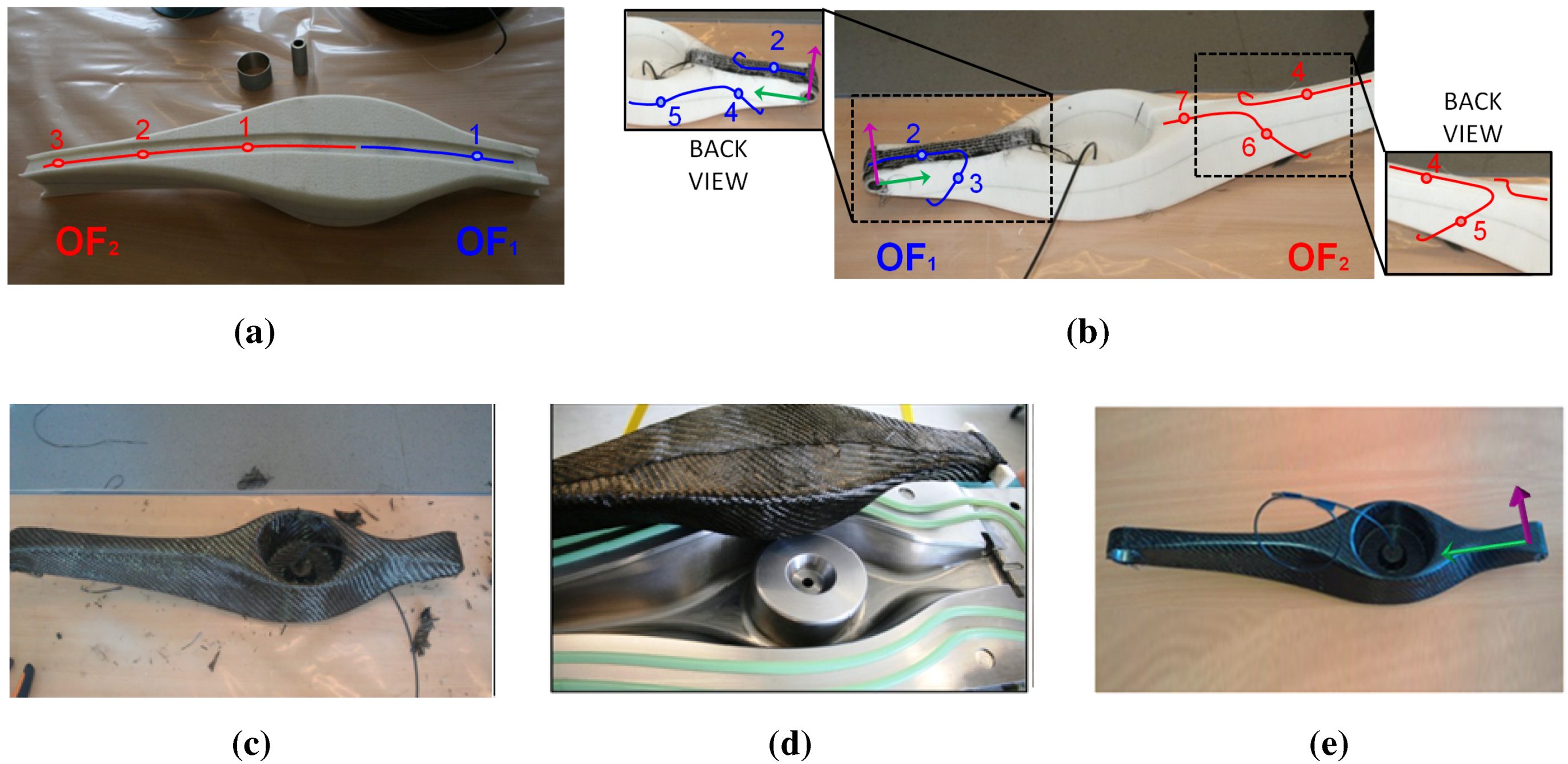
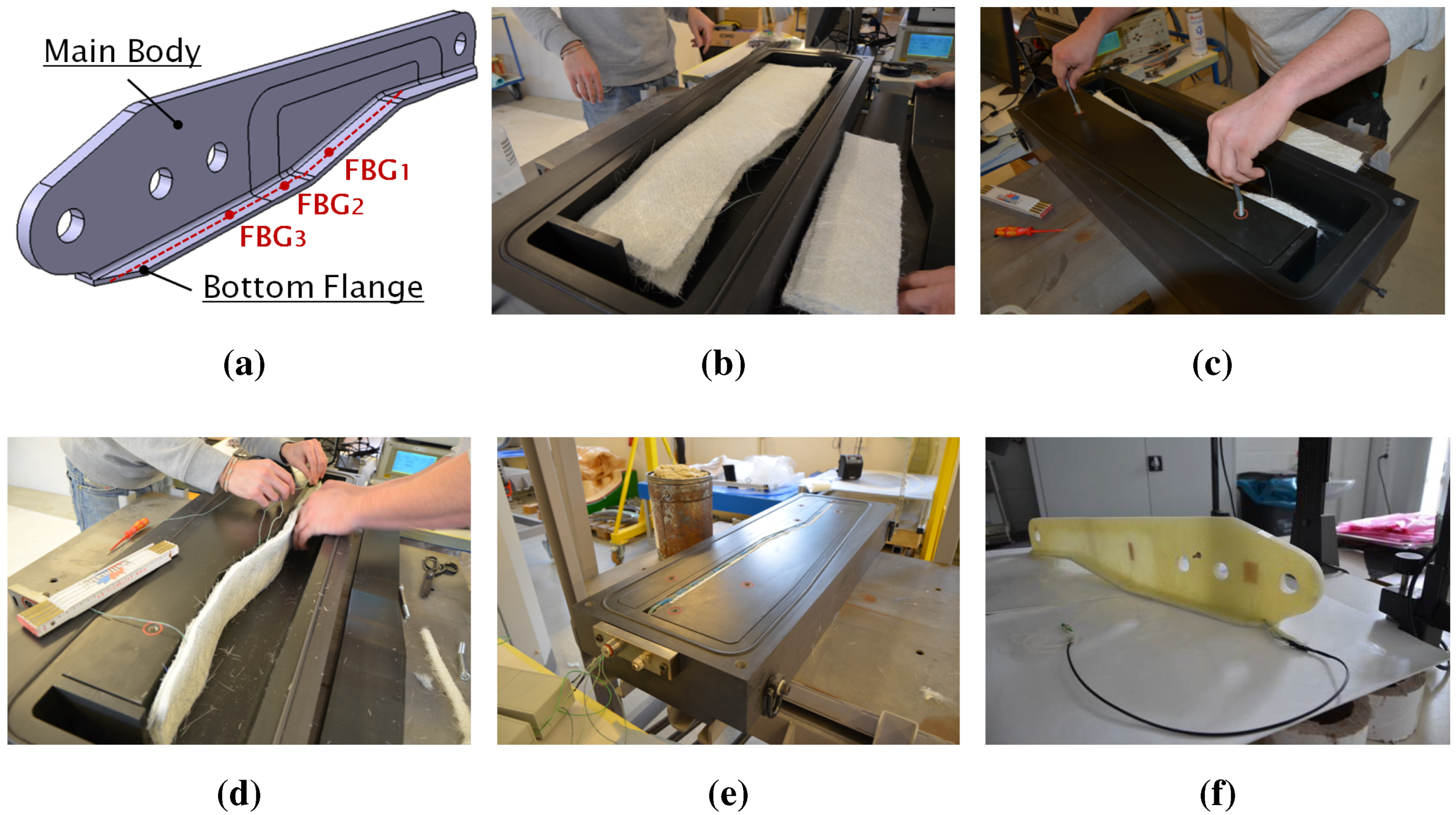
3.1. Carbon Fiber-Reinforced Automotive Control Arm



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fiber Line | Grating | Location on the Arm | Position in the Lay-Out |
|---|---|---|---|
| OF | FBG | longitudinal bottom | 2nd UD/3rd UD |
| FBG | longitudinal top | 2nd UD/3rd UD | |
| FBG | 45 side | foam/twill | |
| FBG | 45 side | foam/twill | |
| FBG | extra FBG | foam/twill | |
| OF | FBG | longitudinal bottom | 2nd UD/3rd UD |
| FBG | longitudinal bottom | 2nd UD/3rd UD | |
| FBG | side | 2nd UD/3rd UD | |
| FBG | longitudinal top | 2nd UD/3rd UD | |
| FBG | 45 side | foam/twill | |
| FBG | 45 side | foam/twill | |
| FBG | extra FBG | foam/twill |

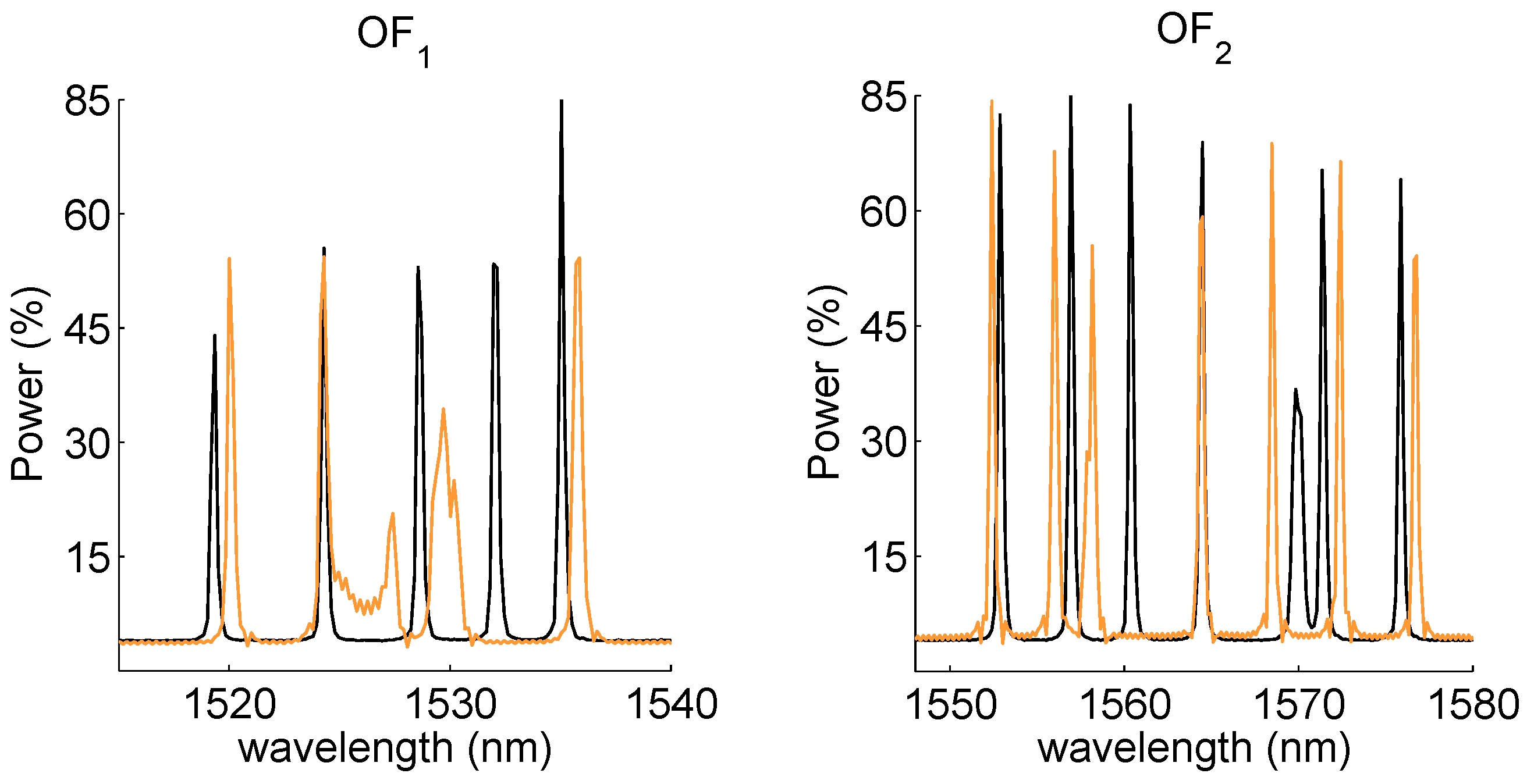
| Fiber Line | Grating | Initial (nm) | Final (nm) |
|---|---|---|---|
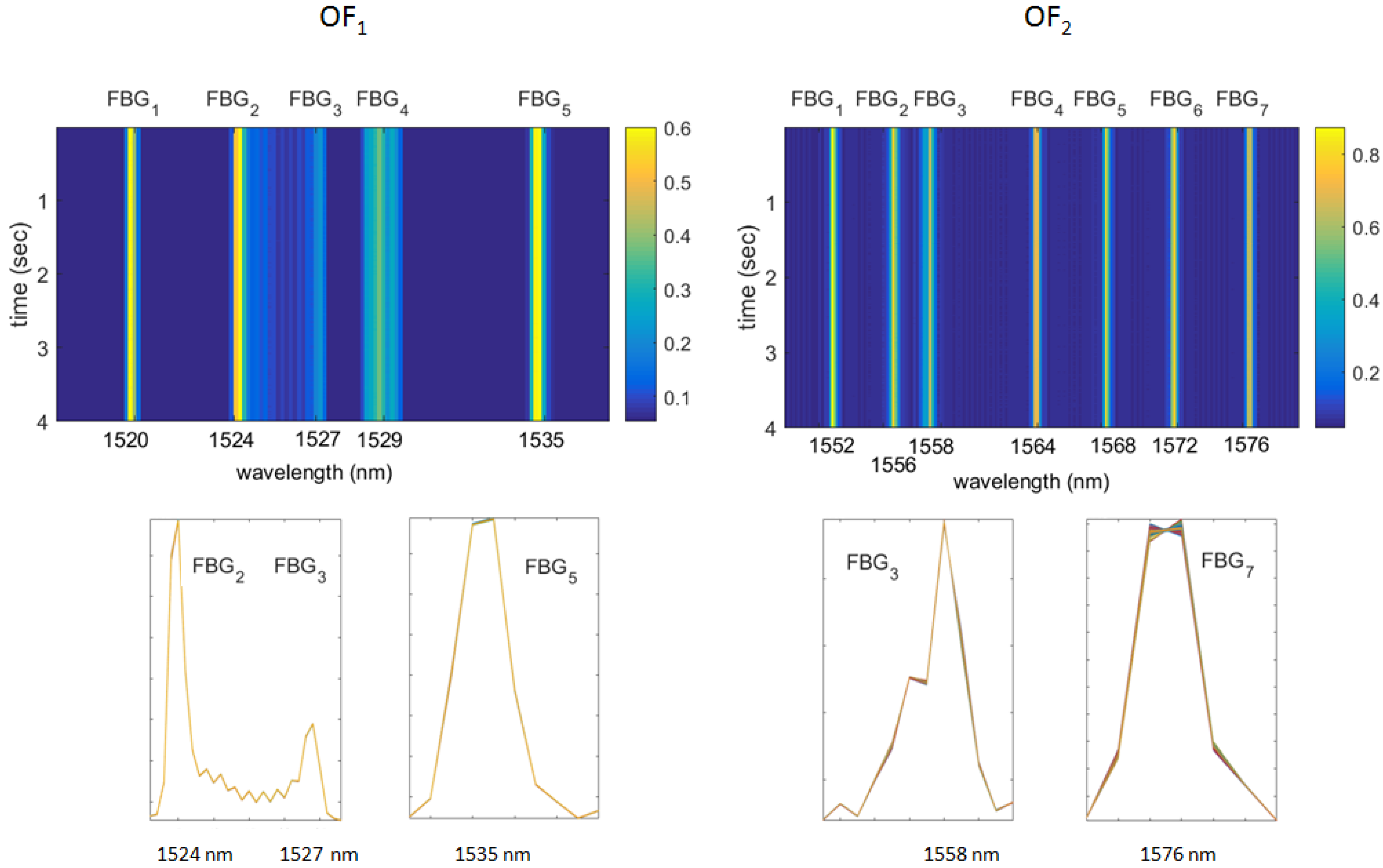
| OF | FBG | 1519.313 | 1520.011 |
| FBG | 1524.290 | 1524.251 | |
| FBG | 1528.621 | 1527.412 | |
| FBG | 1532.059 | 1529.695 | |
| FBG | 1535.020 | 1535.854 | |
| OF | FBG | 1552.906 | 1552.393 |
| FBG | 1556.958 | 1555.989 | |
| FBG | 1560.377 | 1558.166 | |
| FBG | 1564.455 | 1564.492 | |
| FBG | 1569.884 | 1568.468 | |
| FBG | 1571.374 | 1572.412 | |
| FBG | 1575.847 | 1576.779 |
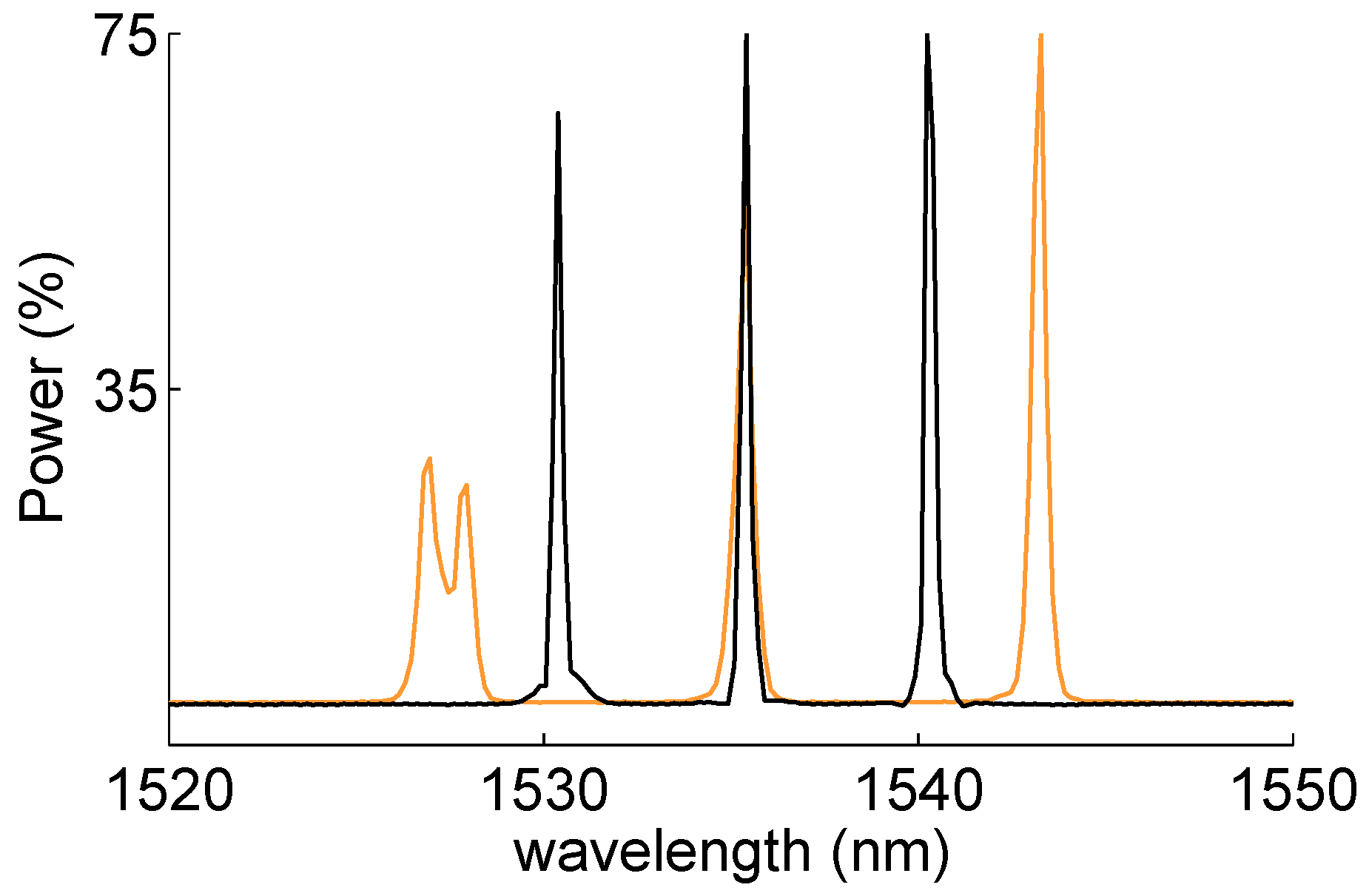
3.2. Glass Fiber Reinforced Aeronautic Hinge Arm


| Grating | Initial (nm) | Final (nm) |
|---|---|---|
| FBG | 1530.389 | 1526.837 |
| 1527.776 * | ||
| FBG | 1535.413 | 1535.235 |
| FBG | 1540.398 | 1542.806 |
4. Experiments and Results
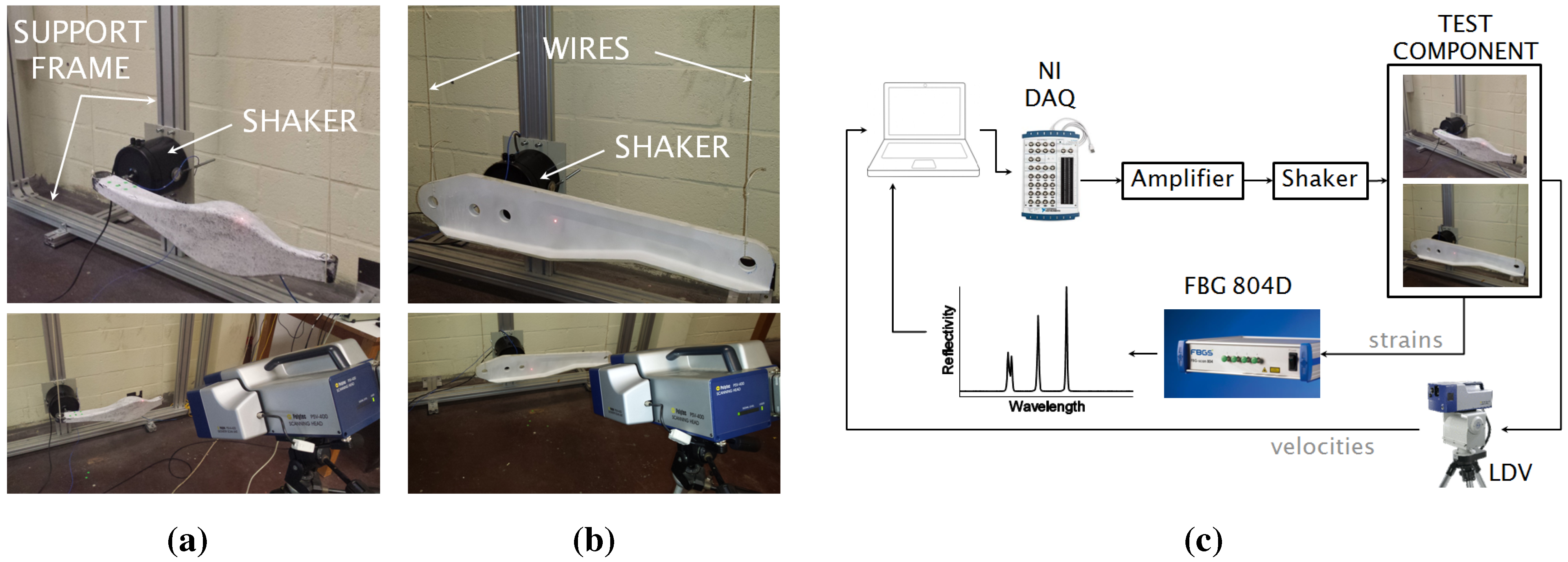
4.1. Experimental Setup and Procedure

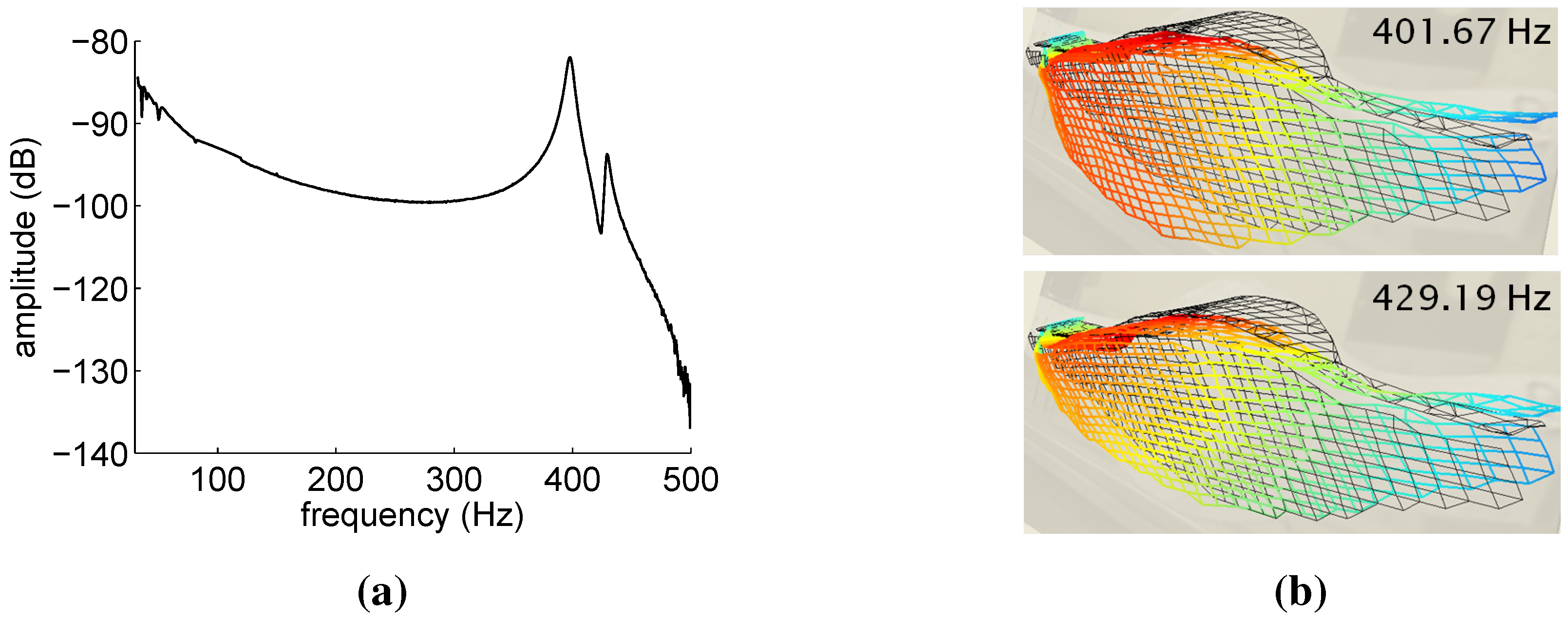
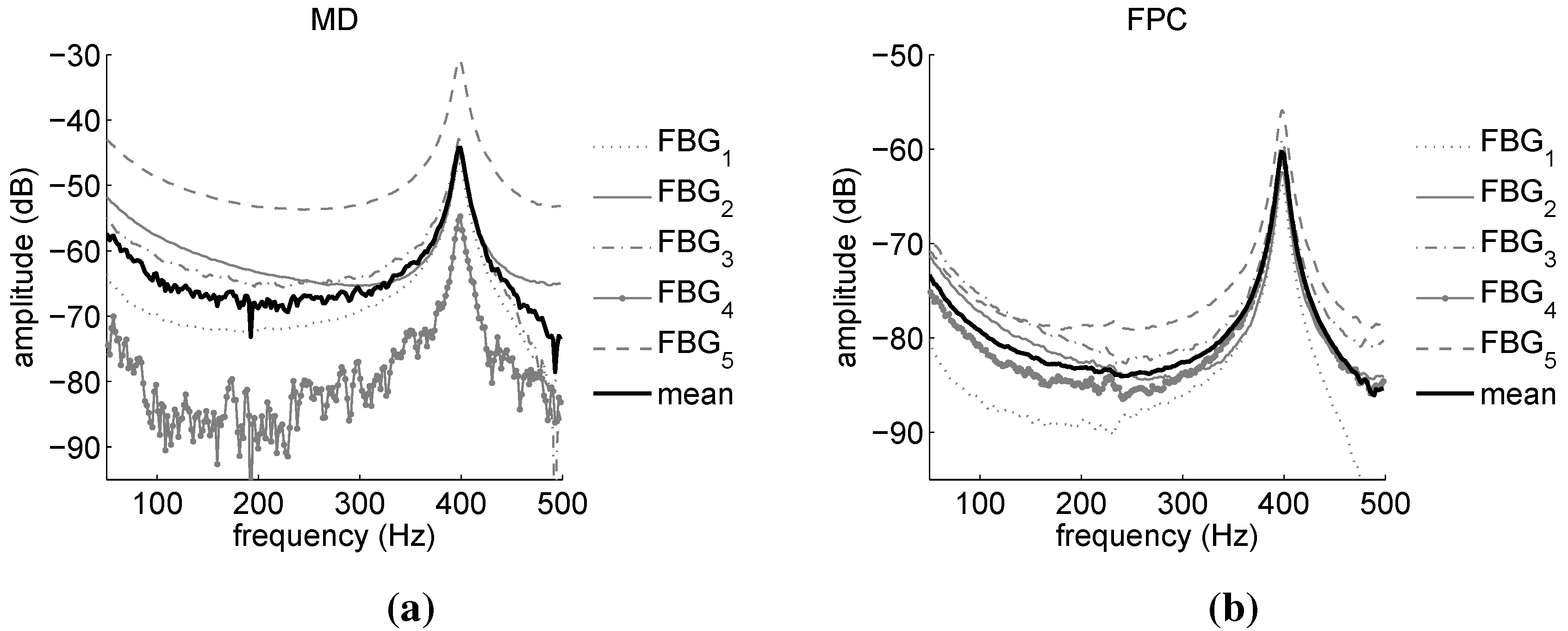
4.2. Modal Analysis of the CFRP Automotive Component

| Frequency f (Hz) | Damping Ratio ξ (%) | ||
|---|---|---|---|
| Peak-Picking | PolyMax | Peak-Picking | PolyMax |
| 398.250 | 398.791 | 0.604 | 0.976 |
| 428.750 | 429.194 | 0.575 | 0.709 |



| Frequency f (Hz) | Damping Ratio ξ (%) | ||||||
|---|---|---|---|---|---|---|---|
| MD Measurements | |||||||
| Peak-Picking | PolyMax | Peak-Picking | PolyMax | ||||
| OF | OF | OF | OF | OF | OF | OF | OF |
| 398 | 399 | 398.366 | 398.473 | 1.080 | 1.203 | 0.886 | 0.883 |
| FPC Measurements | |||||||
| Peak-Picking | PolyMax | Peak-Picking | PolyMax | ||||
| OF | OF | OF | OF | OF | OF | OF | OF |
| 398 | 398 | 398.363 | 398.475 | 1.206 | 1.203 | 0.896 | 0.885 |
| - | - | 427.601 | 429.852 | - | - | 0.335 | 0.685 |
| (%) | (%) | ||
|---|---|---|---|
| MD-PolyMax | |||
| OF | OF | OF | OF |
| 0.106 | 0.079 | 9.22 | 9.52 |
| FPC-PolyMax | |||
| OF | OF | OF | OF |
| 0.107 | 0.079 | 8.196 | 9.32 |
| 0.371 | 0.153 | 52.75 | 3.385 |
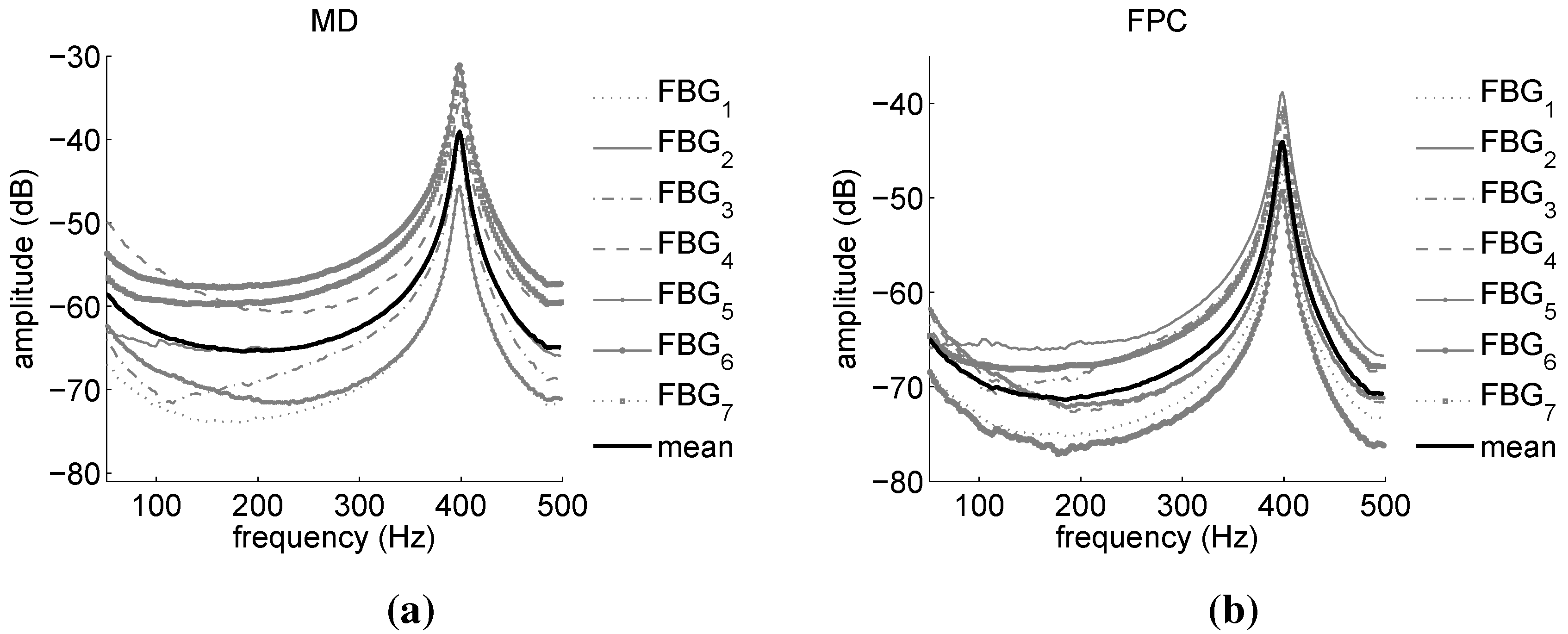
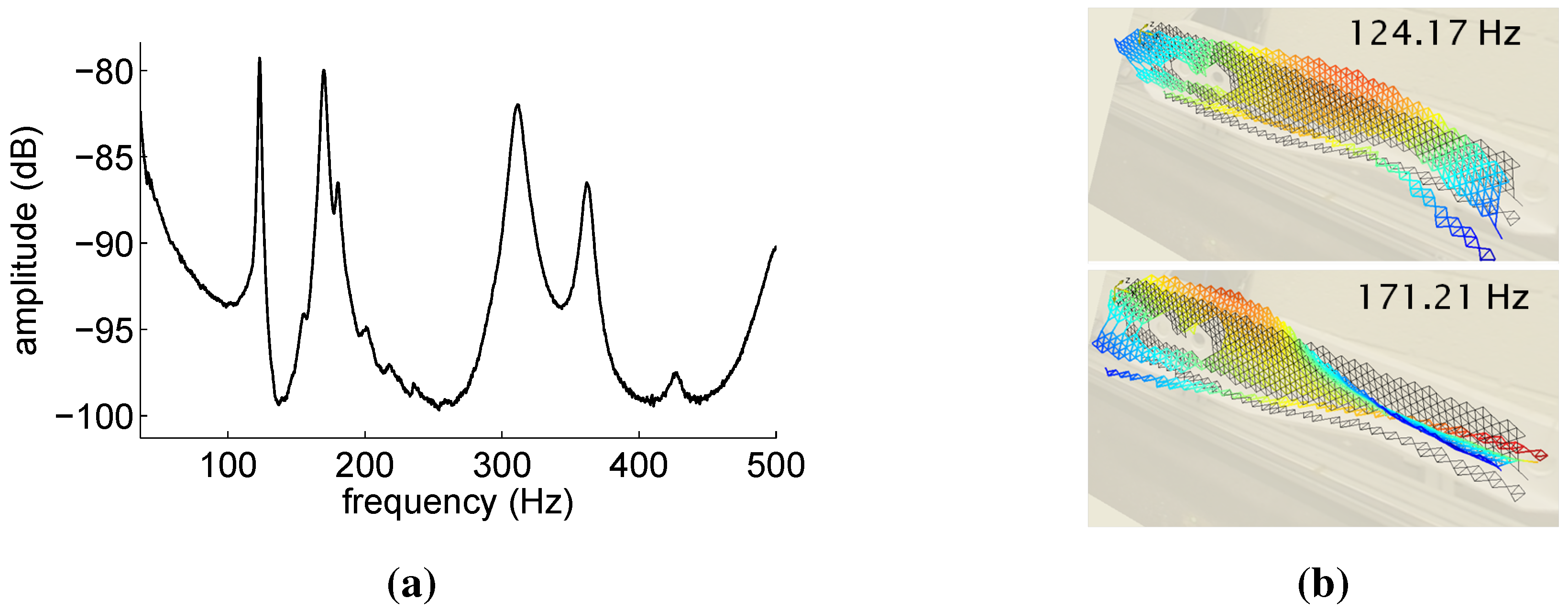
4.3. Modal Analysis of the GFRP Aeronautic Component

| Frequency f (Hz) | Damping Ratio ξ (%) | ||
|---|---|---|---|
| Peak-Picking | PolyMax | Peak-Picking | PolyMax |
| 123.038 | 124.084 | 0.863 | 0.817 |
| 170.053 | 171.362 | - | 1.377 |
| 180.556 | 181.554 | 0.843 | 0.871 |
| 311.347 | 311.864 | 1.804 | 1.563 |
| 362.113 | 363.983 | 1.437 | 1.144 |


| Frequency f (Hz) | Damping Ratio ξ (%) | ||
|---|---|---|---|
| MD Measurements | |||
| Peak-Picking | PolyMax | Peak-Picking | PolyMax |
| 124 | 124.159 | 2.016 | 0.867 |
| 170 | 171.325 | 2.205 | 1.422 |
| - | 180.278 | - | 1.416 |
| 312 | 311.398 | 1.442 | 1.541 |
| 365 | 362.812 | 2.937 | 1.026 |
| FPC Measurements | |||
| Peak-Picking | PolyMax | Peak-Picking | PolyMax |
| 124 | 124.136 | 2.016 | 0.885 |
| 170 | 170.972 | 2.205 | 1.401 |
| - | 180.442 | - | 1.357 |
| 312 | 311.767 | 1.923 | 1.601 |
| 364 | 363.245 | 3.142 | 1.104 |
| (%) | (%) | ||
|---|---|---|---|
| MD-PolyMax | |||
| 0.060 | 6.120 | ||
| 0.138 | 6.357 | ||
| 0.703 | 62.57 | ||
| 0.786 | 1.407 | ||
| 0.322 | 10.31 | ||
| FPC-PolyMax | |||
| 0.042 | 8.323 | ||
| 0.344 | 4.786 | ||
| 0.612 | 55.79 | ||
| 0.668 | 2.431 | ||
| 0.203 | 3.496 | ||
5. Conclusions
- -
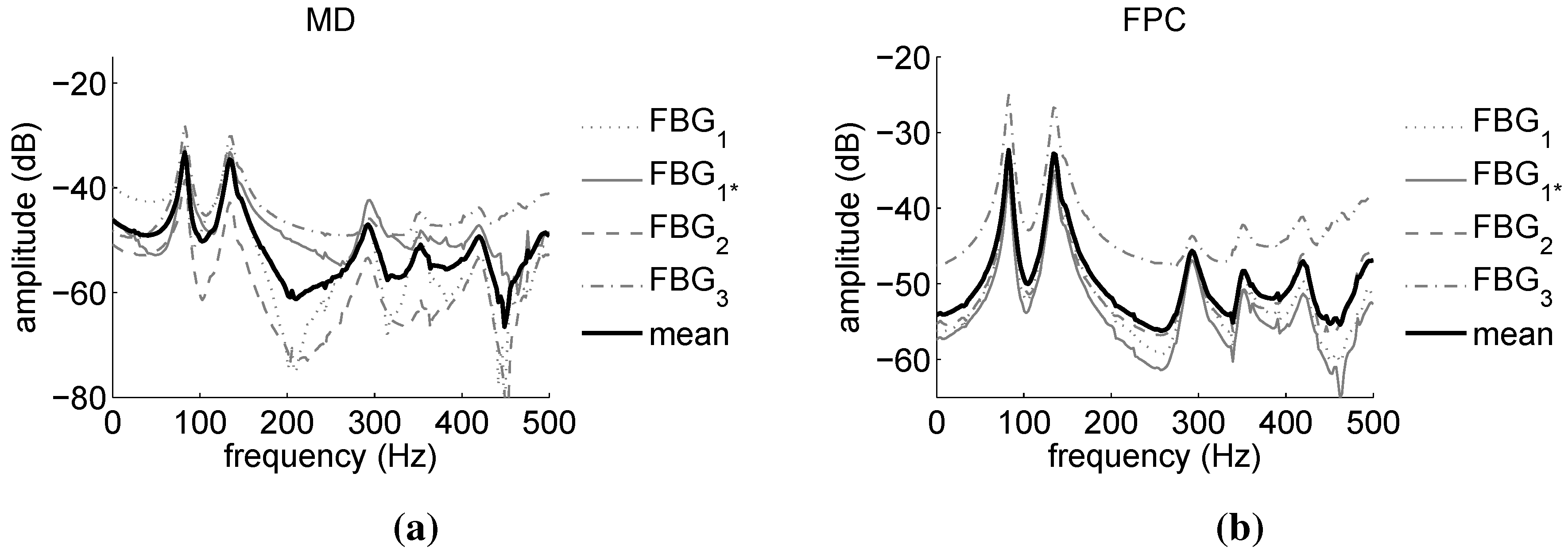
- The FPC demodulation performed better than the MD, especially in the case of a distorted reflected Bragg peak. Particularly, the FPC provided a signals with better signal-to-noise ratios than those obtained via the MD, making, therefore, the identification of the modal parameter more accurate.
- -
- The PolyMax estimator processed the FBG demodulated signals and identified the component modal parameters better than the Peak-Picking estimator. Peak-Picking was not able to retrieve either the second resonance of the automotive control arm or the third resonance of the aeronautic hinge arm. This resonance could be identified with the PolyMax technique.
- -
- The combination FPC-PolyMax guaranteed the most accurate results, being able to treat both distorted and undistorted FBG peaks and to identify modal parameters associated even with barely visible structural resonance. The MD-PolyMax resulted in being less accurate and even failed in one instance.
- -
- The estimation of the component modal frequencies was in general one order of magnitude more accurate than the identification of the damping ratios. This is a well-established phenomenon in modal analysis.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Berthelot, J.M.O. Photosensitivity in Optical Fiber Waveguides: Application to Reflection Filter Fabrication; Springer: New York, NY, USA, 1999. [Google Scholar]
- Gay, D.; Hoa, S.V.; Tsai, S.W. Composite Materials: Design and Applications; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Vassilopoulos, A.P.; Keller, T. Fatigue of Fiber-Reinforced Composites; Springer: London, UK, 2011. [Google Scholar]
- JEC Overview of the Worldwide Composite Industry: 2010–2015, 2011 Release. Available online: http://www.jeccomposites.com/product/overview-worldwide-composites-industry-2010-2015-2011-release (accessed on 30 July 2015).
- Grattan, L.S.; Meggit, B.T. Optical Fiber Sensor Technology: Applications and Systems; Springer: New York, NY, USA, 2013. [Google Scholar]
- Mihailov, S.J. Fiber Bragg Grating Sensors for Harsh Environments. Sensors 2012, 12, 1898–1918. [Google Scholar] [CrossRef] [PubMed]
- De Pauw, B.; Lamberti, A.; Vanlanduit, S.; van Tichelen, K.; Geernaert, T.; Berghmans, F. Signal-to-noise ratio evaluation with draw tower fibre Bragg gratings (DTGs) for dynamic strain sensing at elevated temperatures and corrosive environment. Proc. SPIE 2014. [Google Scholar] [CrossRef]
- Elsmann, T.; Lorenz, A.; Yazd, N.S.; Habisreuther, T.; Dellith, J.; Schwuchow, A.; Bierlich, J.; Schuster, K.; Rothhardt, M.; Kido, L.; et al. High temperature sensing with fiber Bragg gratings in sapphire-derived all-glass optical fibers. Opt. Express 2014, 22, 26825–26833. [Google Scholar] [CrossRef] [PubMed]
- Murukeshan, V.M.; Chan, P.Y.; Ong, L.S.; Seah, L.K. Cure monitoring of smart composites using fiber Bragg grating based embedded sensors. Sens. Actuators A Phys. 2000, 79, 153–161. [Google Scholar] [CrossRef]
- Leng, J.S.; Asundi, A. Real-time cure monitoring of smart composite materials using extrinsic Fabry-Perot interferometer and fiber Bragg grating sensors. Smart Mater. Struct. 2002, 11, 249–255. [Google Scholar] [CrossRef]
- Olivier, P.; Mulle, M.; Paris, C.; Collombet, F. Carbon/polymeric composites autoclave cure monitoring with optical fiber Bragg grating (FBG) sensors. In Wiley Encyclopedia of Composites; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2012. [Google Scholar]
- Chiesura, G.; Luyckx, G.; Voet, E.; van Paepegem, W.; Degrieck, J.; Kaufmann, M.; Martens, T.; Lamberti, A.; Vanlanduit, S. Production monitoring of a RTM automotive control arm by means of fibre optic sensors. In Proceedings of the Optimess 2015, Antwerp, Belgium, 8–9 April 2015.
- Kinet, D.; Mégret, P.; Goossen, K.W.; Qiu, L.; Heider, D.; Caucheteur, C. Fiber Bragg grating sensors toward structural health monitoring in composite materials: Challenges and solutions. Sensors 2014, 14, 7394–7419. [Google Scholar] [CrossRef] [PubMed]
- Othonos, A.; Kalli, K. Fibre Bragg Gratings: Fundamentals and Applications in Telecommunications and Sensing; Artech House: London, UK, 1999. [Google Scholar]
- Cusano, A.; Cutolo, A.; Albert, J. Fiber Bragg Grating Sensors: Recent Advancements, Industrial Applications and Market Exploitation; Bentham Science Publishers Ltd.: Sharjah, UAE, 2011. [Google Scholar]
- Luyckx, G.; Voet, E.; Lammens, N.; Degrieck, J. Strain Measurements of Composite Laminates with Embedded Fibre Bragg Gratings: Criticism and Opportunities for Research. Sensors 2011, 11, 384–408. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Okabe, Y.; Yashiro, S.; Kosaka, T.; Takeda, N. Detection of transverse cracks in CFRP composites using embedded fiber Bragg grating sensors. Smart Mater. Struct. 2000, 9, 832–838. [Google Scholar] [CrossRef]
- Takeda, S.; Okabe, Y.; Takeda, N. Delamination detection in CFRP laminates with embedded small-diameter fiber Bragg grating sensors. Compos. A 2002, 33, 971–980. [Google Scholar] [CrossRef]
- Jones, R.; Galea, S. Health monitoring of composite repairs and joints using optical fibers. Compos. Struct. 2002, 58, 397–403. [Google Scholar] [CrossRef]
- Studer, M.; Peters, K.; Botsis, J. Method for determination of crack bridging parameters using long optical fiber Bragg grating sensors. Compos. B 2003, 34, 347–359. [Google Scholar] [CrossRef]
- Ogisu, T.; Shimanuki, M.; Kiyoshima, S.; Okabe, Y.; Takeda, N. Damage growth detection of composite laminate using embedded FBG sensor/PZT actuator hybrid system. Proc. SPIE 2005. [Google Scholar] [CrossRef]
- Sekine, H.; Fujimoto, S.; Okabe, T.; Takeda, N.; Yokobori, T. Structural health monitoring of cracked aircraft panels repaired with bonded patches using fiber Bragg grating sensors. Appl. Compos. Mater. 2006, 13, 89–98. [Google Scholar] [CrossRef]
- Minakuchi, S.; Okabe, Y.; Takeda, N. Real-time detection of Debonding between honeycomb core and facesheet using a small-diameter FBG sensor embedded in adhesive layer. J. Sandw. Struct. Mater. 2007, 9, 9–33. [Google Scholar] [CrossRef]
- Sorensen, L.; Botsis, J.; Gmur, T.; Cugnoni, J. Delamination detection and characterisation of bridging tractions using long FBG optical sensors. Compos. A Appl. Sci. Manuf. 2007, 38, 2087–2096. [Google Scholar] [CrossRef]
- Silva-Muñoz, R.A.; Lopez-Anido, R.A. Structural health monitoring of marine composite structural joints using embedded fiber Bragg grating strain sensors. Compos. Struct. 2009, 89, 224–234. [Google Scholar] [CrossRef]
- Bernasconi, O.; Ewins, D.J. Application of strain modal testing to real structures. In Proceedings of the 7th International Modal Analysis Conference, Las Vegas, NV, USA, 30 January–2 February 1989.
- Yam, L.Y.; Leung, T.P.; Li, D.B.; Xue, K.Z. Theoretical and experimental study of modal strain analysis. J. Sound Vib. 1996. [Google Scholar] [CrossRef]
- Schulz, W.L.; Conte, J.P.; Udd, E.; Kunzler, M. Structural damage assessment via modal property identification using macro-strain measurements with fiber Bragg gratings as an alternative to accelerometers. In Proceedings of the 15th Optical Fiber Sensors Conference Technical Digest, Portland, OR, USA, 6–10 May 2002.
- Calvert, S.; Conte, J.P.; Moaveni, B.; Schulz, W.L.; de Callafon, R. Full scale testing results of structural damage detection using long gage fiber Bragg gratings and modal analysis. Proc. SPIE 2003. [Google Scholar] [CrossRef]
- Cusano, A.; Capoluongo, P.; Campopiano, S.; Ambrosino, C.; Giordano, M.; Caponero, M.; Paolozzi, A.; Felli, F. Dynamic measurements on a star tracker prototype of AMS using fiber optic sensors. Proc. SPIE 2005. [Google Scholar] [CrossRef]
- Baldwin, C.S.; Balachandran, B.; Buckley, S. Modal Analysis of Vibrating Structure Using a Fiber Bragg Grating System. In Proceedings of the 24th IMAC Conference, St. Louis, MO, USA, 30 January–2 February 2006.
- De Pauw, B.; Vanlanduit, S.; Berghmans, F.; Geernaert, T.; Chah, K.; van Tichelen, K. Benchmarking of deformation and vibration measurement techniques for nuclear fuel pins. Measurements 2013, 46, 3647–3653. [Google Scholar] [CrossRef]
- Dos Santos, F.L.M.; Peeters, B.; Gielen, L.; Desmet, W.; Sandoval Góes, L.C. The use of fiber Bragg grating sensors for strain modal analysis. In Topics in Modal Analysis; Springer International Publishing: New York, NY, USA, 2015. [Google Scholar]
- Dos Santos, F.L.M.; Peeters, B.; van der Vorst, R.; Desmet, W.; Sandoval Góes, L.C. The use of strain and mixed strain/acceleration measurements for modal analysis. In Proceedings of the 9th International Conference on Structural Dynamics, Saint Prtersburg, Russia, 28 June–2 July 2014.
- Moretti, P.; de Pauw, B.; Lamberti, A.; Reynders, E.; Geernaert, T.; Berghmans, F.; de Roeck, G. Identification of mode shapes from sub-microstrain Fibre—Ptic Bragg Grating data using an improved wavelength detection algorithm. In Proceedings of the Optimess, Antwerp, Belgium, 8–9 April 2015.
- Cusano, A.; Capoluongo, P.; Campopiano, S.; Giordano, M.; Caponero, M.; Paolozzi, A. Experimental modal analysis of an aircraft model wing by embedded fiber Bragg grating sensors. IEEE Sens. J. 2006, 6, 67–77. [Google Scholar] [CrossRef]
- Bang, H.; Shin, H. Structural health monitoring of wind turbine blade using embedded fiber Bragg grating sensors. In Proceedings of EWEC2010 Conference, Warsaw, Poland, 20–23 April 2010.
- Lamberti, A.; Chiesura, G.; de Pauw, B.; Vanlanduit, S. Monitoring of fatigue induced propagating delaminations using embedded fiber Bragg grating sensors and operational modal parameter estimation. In Proceedings of the ICCM20 Conference, Copenhagen, Danmark, 19–24 July 2015.
- Vella, T.; Chadderdon, S.; Selfridge, R.; Schultz, S.; Webb, S.; Park, C.; Peters, K.; Zikry, M. Full-spectrum interrogation of fiber Bragg gratings at 100 kHz for detection of impact loading. Meas. Sci. Technol. 2010. [Google Scholar] [CrossRef]
- Webb, S.; Peters, K.; Zikry, M.A.; Chadderdon, S.; Nikola, S.; Selfridge, R.; Schultz, S. Full-spectral interrogation of fiber Bragg grating sensors exposed to steady-state vibration. Exp. Mech. 2012, 513–530. [Google Scholar] [CrossRef]
- Potter, K. Resin Transfer Moulding; Chapmam & Hall: London, UK, 1997. [Google Scholar]
- FBG Scan 700. Available online: http://www.fbgs.com/products/measurement-devices/fbg-scan-700/800/ (accessed on 30 July 2015).
- Lamberti, A.; Vanlanduit, S.; de Pauw, B.; Berghmans, F. A novel fast phase correlation algorithm for peak wavelength detection of fiber Bragg grating sensors. Opt. Express 2014, 22, 7099–7112. [Google Scholar] [CrossRef] [PubMed]
- Lamberti, A.; Vanlanduit, S.; de Pauw, B.; Berghmans, F. Peak detection in fiber Bragg grating using a fast phase correlation algorithm. Proc. SPIE 2014. [Google Scholar] [CrossRef]
- Avitabile, P. 101 Ways to exctract modal parameters-which is the one for me? Exp. Tech. 2006, 30, 48–56. [Google Scholar] [CrossRef]
- Peeters, B.; van der Auweraer, H.; Guillaume, P. The polymax frequency-domain method: A new standard for modal parameter estimation? Shock Vib. 2004, 11, 395–409. [Google Scholar] [CrossRef]
- Peeters, B.; Lowet, G.; van der Auweraer, H.; Leuridan, J. A new procedure for modal parameter estimation. J. Sound Vib. 2004, 38, 24–29. [Google Scholar]
- PSV. Available online: http://www.polytec.com/int/products/vibration-sensors/scanning-vibrometers/ (acessed on 5 August 2015).
- Kashyap, R. Fiber Bragg Gratings; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Barlow, A.; Payne, D. The stress-optic effect in optical fibers. J. Quantum Electron. 1983, 19, 834–839. [Google Scholar] [CrossRef]
- Chan, C.C.; Shi, C.Z.; Jin, W.; Wang, D.N. Improving the wavelength detection accuracy of FBG sensors using an ADALINE network. IEEE Photonics Technol. Lett. 2003, 15, 1126–1128. [Google Scholar] [CrossRef]
- Caucheteur, C.; Chah, K.; Lhommé, F.; Blondel, M.; Mégret, P. Autocorrelation demodulation technique for fiber Bragg grating sensor. IEEE Photonics Technol. Lett. 2004, 16, 2320–2322. [Google Scholar]
- Huang, C.; Jing, W.; Liu, K.; Zhang, Y.; Peng, G.D. Demodulation of fiber Bragg grating sensor using cross-correlation algorithm. IEEE Photonics Technol. Lett. 2007, 19, 707–709. [Google Scholar] [CrossRef]
- Negri, L.; Nied, A.; Kalinowsky, H.; Paterno, A. Benchmark of peak detection algorithms in fiber Bragg grating interrogation and a new neural network for its performance improvement. Sensors 2011, 11, 3466–3482. [Google Scholar] [CrossRef] [PubMed]
- Lamberti, A.; Vanlanduit, S.; de Pauw, B.; Berghmans, F. Influence of fiber Bragg grating spectrum degradation on the performance of sensor interrogation algorithms. Sensors 2014, 14, 24258–24277. [Google Scholar] [CrossRef] [PubMed]
- Yam, L.H.; Leung, T.P.; Xue, K.Z.; Wang, B.; Li, D.B. Experimental study on modal strain analysis rectangula thin plates with holes. In Proceedings of the 12th IMAC Conference, Honolulu, HI, USA, 31 January–3 February 1994.
- Kranjc, T.; Slavič, J.; Boltežar, M. A comparison of the strain and the classic experimental modal analysis. J. Vib. Control 2014, 7, 2199–2212. [Google Scholar] [CrossRef]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures; John Wiley and Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- DeMaCo Design for Manufacture of Composites. Available online: http://www.slc-lab.be/sites/default/files/DeMaCo%20Public%20report.pdf (accessed on 5 August 2015).
- Asco. Available online: http://www.asco.be/ (accessed on 5 August 2015).
- Guillaume, P.; Verboven, P.; Vanlanduit, S.; Parloo, E. Multisine excitations—New developments applications modal analysis. In Proceedings of the 19th IMAC Conference, Orlando, FL, USA, 5–9 February 2001.
- NI USB-6341. Available online: http://sine.ni.com/nips/cds/view/p/lang/en/nid/209069 (accessed on 5 August 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lamberti, A.; Chiesura, G.; Luyckx, G.; Degrieck, J.; Kaufmann, M.; Vanlanduit, S. Dynamic Strain Measurements on Automotive and Aeronautic Composite Components by Means of Embedded Fiber Bragg Grating Sensors. Sensors 2015, 15, 27174-27200. https://doi.org/10.3390/s151027174
Lamberti A, Chiesura G, Luyckx G, Degrieck J, Kaufmann M, Vanlanduit S. Dynamic Strain Measurements on Automotive and Aeronautic Composite Components by Means of Embedded Fiber Bragg Grating Sensors. Sensors. 2015; 15(10):27174-27200. https://doi.org/10.3390/s151027174
Chicago/Turabian StyleLamberti, Alfredo, Gabriele Chiesura, Geert Luyckx, Joris Degrieck, Markus Kaufmann, and Steve Vanlanduit. 2015. "Dynamic Strain Measurements on Automotive and Aeronautic Composite Components by Means of Embedded Fiber Bragg Grating Sensors" Sensors 15, no. 10: 27174-27200. https://doi.org/10.3390/s151027174
APA StyleLamberti, A., Chiesura, G., Luyckx, G., Degrieck, J., Kaufmann, M., & Vanlanduit, S. (2015). Dynamic Strain Measurements on Automotive and Aeronautic Composite Components by Means of Embedded Fiber Bragg Grating Sensors. Sensors, 15(10), 27174-27200. https://doi.org/10.3390/s151027174