
A Flight Test of the Strapdown Airborne Gravimeter SGA-WZ in Greenland

Abstract
:1. Introduction
2. Principle of Strapdown Airborne Gravimeter
3. System Description
3.1. Structure of SGA-WZ

3.2. Performance of Sensors
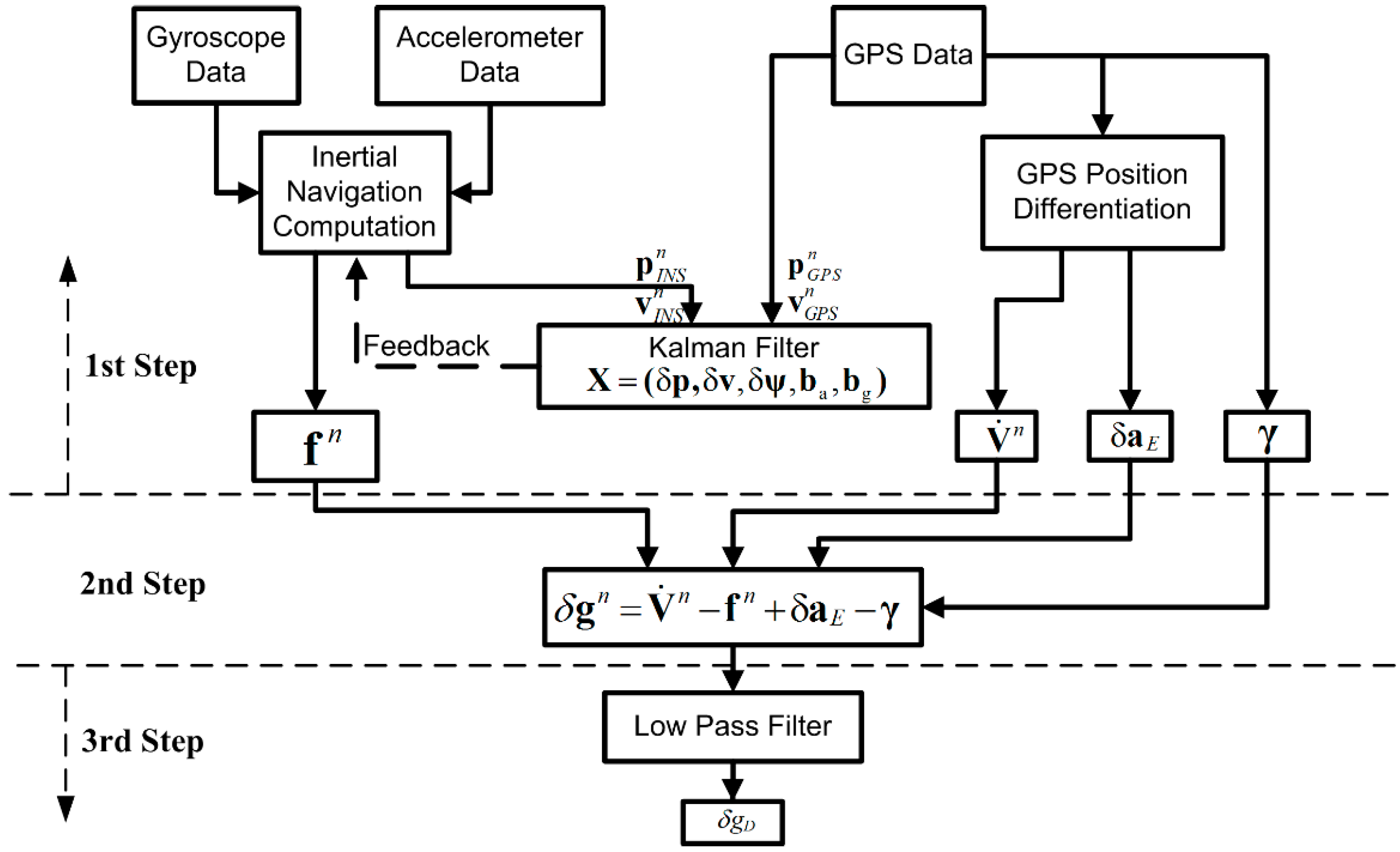
3.3. Data Processing

4. Test Description

5. Results and Analysis





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Min | Max | Mean | RMS |
|---|---|---|---|---|
| Northbound-Southbound | −7.5 | 5.5 | −1.7 | 1.5 |
| Northbound-LCR | −7.3 | 2.6 | −1.7 | 2.0 |
| Southbound-LCR | −7.8 | 4.8 | −0.0 | 2.6 |
| Mean(SGA-WZ)-LCR | −7.6 | 3.1 | −0.9 | 2.4 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schwarz, K.P.; Wei, M. Some unsolved problems in airborne gravimetry. In Gravity and Geoid; Sünkel, H., Marson, I., Eds.; Springer: Berlin/Heidelberg, Germany, 1995; Volume 113, pp. 131–150. [Google Scholar]
- Jekeli, C. Airborne vector gravimetry using precise, position-aided inertial measurement units. Bull. Géod. 1994, 69, 1–11. [Google Scholar]
- Wei, M.; Schwarz, K.P. Flight test results from a strapdown airborne gravity system. J. Geod. 1998, 72, 323–332. [Google Scholar] [CrossRef]
- Olesen, A.V.; Forsberg, R. Airborne gravity field determination. In Sciences of Geodesy–I: Advances and Future Directions; Springer: Berlin/Heidelberg, Germany, 2010; pp. 83–104. [Google Scholar]
- Li, X. Strapdown INS/DGPS airborne gravimetry tests in the gulf of mexico. J. Geod. 2011, 85, 597–605. [Google Scholar] [CrossRef]
- Glennie, C.L.; Schwarz, K.P.; Bruton, A.M.; Forsberg, R.; Olesen, A.V.; Keller, K. A comparison of stable platform and strapdown airborne gravity. J. Geod. 2000, 74, 383–389. [Google Scholar] [CrossRef]
- Lacoste, L. Measurement of gravity at sea and in the air. Rev. Geophys. 1967, 5, 477–524. [Google Scholar] [CrossRef]
- Lacoste, L.; Clarkson, N.; Hamilton, G. Lacoste and romberg stabilized platform shipboaed gravity meter. Geophysics 1967, 32, 99–109. [Google Scholar] [CrossRef]
- Bruton, A.M. Improving the Accuracy and Resolution of SINS/DGPS Airborne Gravimetry. PhD’s Thesis, University of Calgary, Calgary, AB, Canada, December 2000. [Google Scholar]
- Argyle, M.; Ferguson, S.; Sander, L.; Sander, S. AIRGrav results: A comparison of airborne gravity data with GSC test site data. Lead. Edge 2000, 19, 1134–1138. [Google Scholar] [CrossRef]
- Forsberg, R.; Olesen, A.V.; Munkhtsetseg, D.; Amarzaya, B. Downward continuation and geoid determination in mongolia from airborne and surface gravimetry and srtm topography. In Proceedings of the 2007 International Forum on Strategic Technology, IFOST 2007, Ulaanbaatar, Mongolia, 3–6 October 2007; pp. 470–475.
- Studinger, M.; Bell, R.; Frearson, N. Comparison of AIRGrav and GT-1A airborne gravimeters for research applications. Geophysics 2008, 73, 151–161. [Google Scholar] [CrossRef]
- Forsberg, R.; Olesen, A.V.; Einarsson, I.; Manandhar, N.; Shreshta, K. Geoid of nepal from airborne gravity survey. Earth Edge Sci. Sustain. Planet 2014, 139, 521–528. [Google Scholar]
- Krasnov, A.A.; Sokolov, A.V.; Elinson, L.S. Operational experience with the chekan-am gravimeters. Gyroscopy Navig. 2014, 5, 181–185. [Google Scholar] [CrossRef]
- Sun, Z. Theory, Methods and Applications of Airborne Gravimetry. Ph.D. Thesis, Information Engineering University, Zhengzhou, China, October 2004. [Google Scholar]
- Zhang, K. Research on the Methods of Airborne Gravimetry Based on Sins/Dgps. Ph.D. Thesis, National University of Defense Technology, Changsha, China, April 2007. [Google Scholar]
- Kwon, J.H.; Jekeli, C. A new approach for airborne vector gravimetry using GPS/INS. J. Geod. 2001, 74, 690–700. [Google Scholar] [CrossRef]
- Kwon, J.H. Airborne Vector Gravimetry Using Gps/Ins. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, April 2000. [Google Scholar]
- Li, X. Moving Base INS/GPS Vector Gravimetry on a Land Vehicle; Report No.486; The Ohio State University: Columbus, OH, USA, December 2007. [Google Scholar]
- Cai, S.; Zhang, K.; Wu, M.; Huang, Y. The method on acceleration extraction from strapdown airborne scalar gravimeter based on flight dynamics. Adv. Mater. Res. 2012, 591–593, 2152–2156. [Google Scholar] [CrossRef]
- Huang, Y.; Olesen, A.V.; Wu, M.; Zhang, K. Sga-wz: A new strapdown airborne gravimeter. Sensors 2012, 12, 9336–9348. [Google Scholar] [CrossRef] [PubMed]
- Cai, S.; Wu, M.; Zhang, K.; Cao, J.; Tuo, Z.; Huang, Y. The first airborne scalar gravimetry system based on SINS/DGPS in China. Sci. China Earth Sci. 2013, 56, 2198–2208. [Google Scholar] [CrossRef]
- Harlan, R.B. Eotvos corrections for airborne gravimetry. J. Geophys. Res. 1968, 73, 4675–4679. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; American Institute of Aeronautics and Astronautics: Cambridge, MA, USA, 2004; p. 578. [Google Scholar]
- Forsberg, R.; Olesen, A.V.; Keller, K.; Møller, M. Airborne Gravity Survey of Sea Areas around Greenland and Svalbard 1999–2001; Technical Report No. 18; National Survey and Cadastre: Denmark, 2003; pp. 1–56. [Google Scholar]
- Olesen, A.V.; Forsberg, R.; Keller, K. Airborne gravity survey of greenland’s continental shelf. Int. Geoid Serv. Bull. 2002, 13, 74–84. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Forsberg, R.; Wu, M.; Olesen, A.V.; Zhang, K.; Cao, J. A Flight Test of the Strapdown Airborne Gravimeter SGA-WZ in Greenland. Sensors 2015, 15, 13258-13269. https://doi.org/10.3390/s150613258
Zhao L, Forsberg R, Wu M, Olesen AV, Zhang K, Cao J. A Flight Test of the Strapdown Airborne Gravimeter SGA-WZ in Greenland. Sensors. 2015; 15(6):13258-13269. https://doi.org/10.3390/s150613258
Chicago/Turabian StyleZhao, Lei, René Forsberg, Meiping Wu, Arne Vestergaard Olesen, Kaidong Zhang, and Juliang Cao. 2015. "A Flight Test of the Strapdown Airborne Gravimeter SGA-WZ in Greenland" Sensors 15, no. 6: 13258-13269. https://doi.org/10.3390/s150613258
APA StyleZhao, L., Forsberg, R., Wu, M., Olesen, A. V., Zhang, K., & Cao, J. (2015). A Flight Test of the Strapdown Airborne Gravimeter SGA-WZ in Greenland. Sensors, 15(6), 13258-13269. https://doi.org/10.3390/s150613258