
Ocean Wave Separation Using CEEMD-Wavelet in GPS Wave Measurement



Abstract
:1. Introduction
2. Estimation of Wave Power Spectrum
3. The CEEMD-Wavelet Wave Separation Method
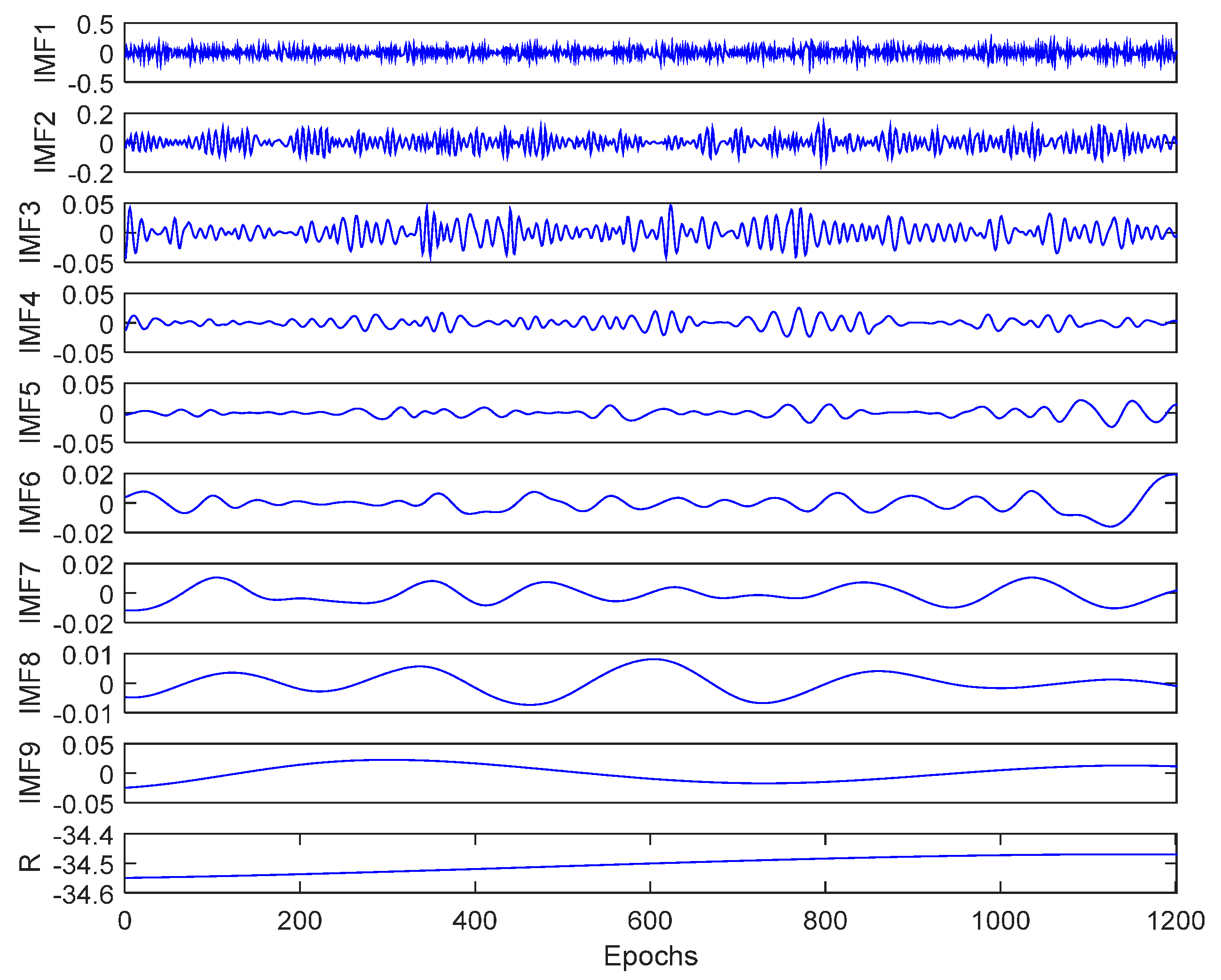
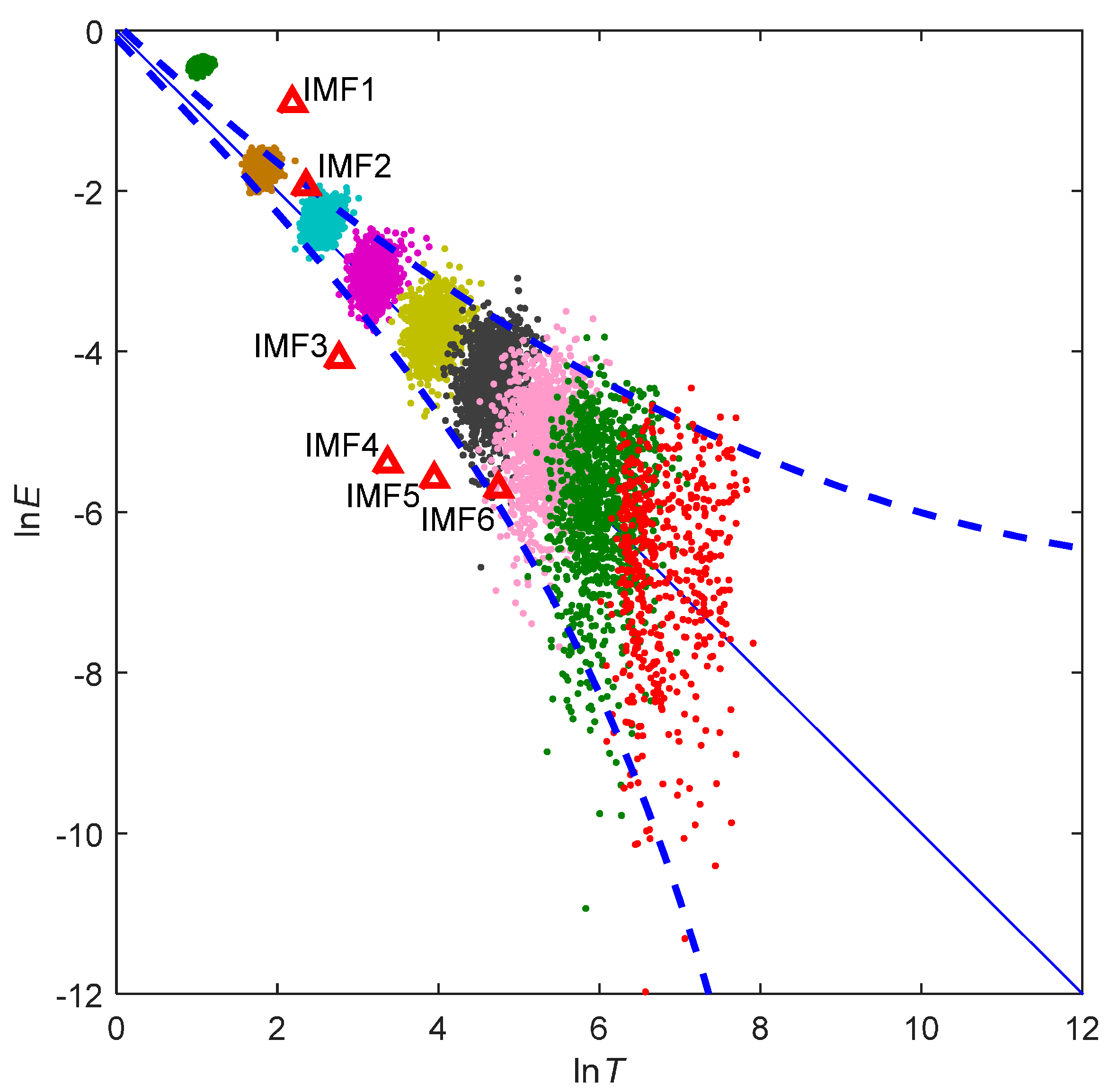
3.1. CEEMD
- (1)
- Add a pair of opposite phase Gaussian white noises g(t) to s(t) with the same amplitude, generating two signals as follows:
- (2)
- Decompose and by EMD a few times, derive and by averaging the corresponding IMFk−s obtained over two ensembles of trials.
- (3)
- Finally, the is the mean of and , that is:
3.2. Wavelet Threshold Denoising Model
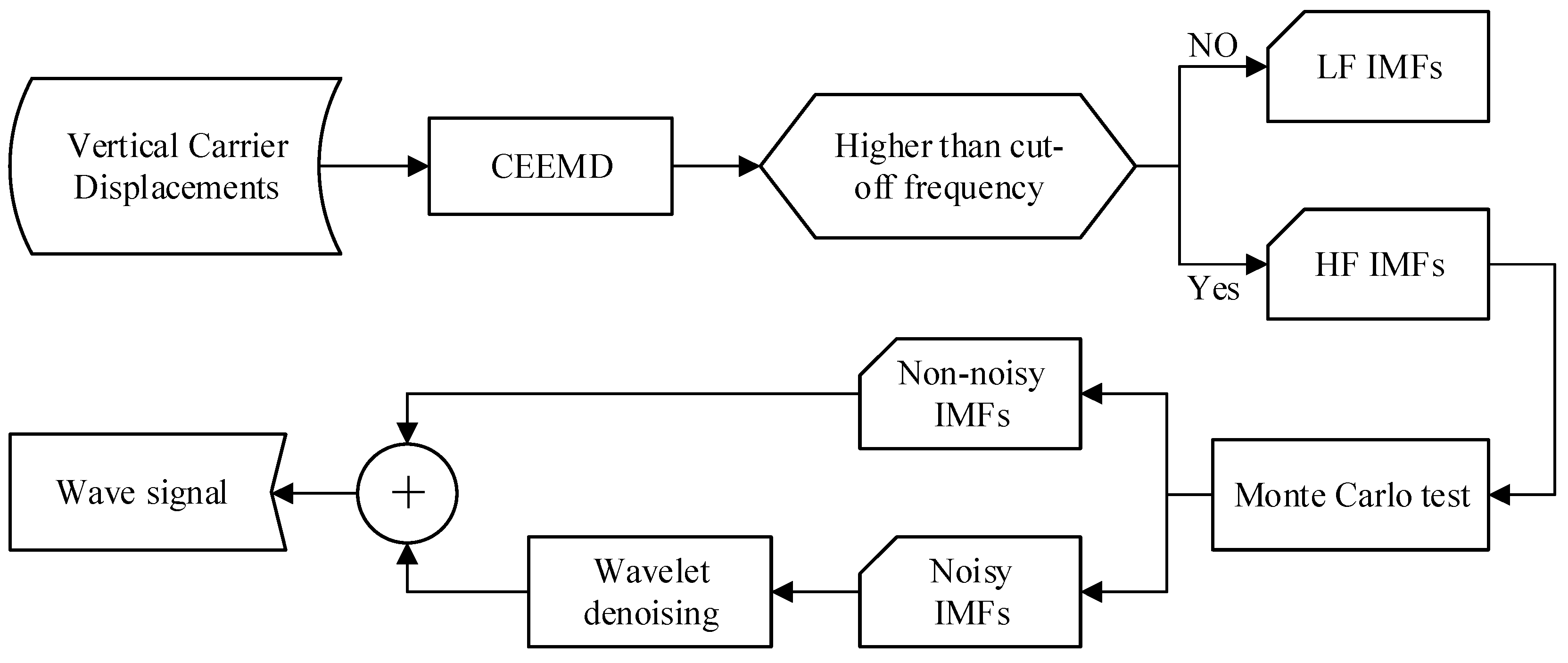
3.3. CEEMD-Wavelet Method

4. Experimental Analysis

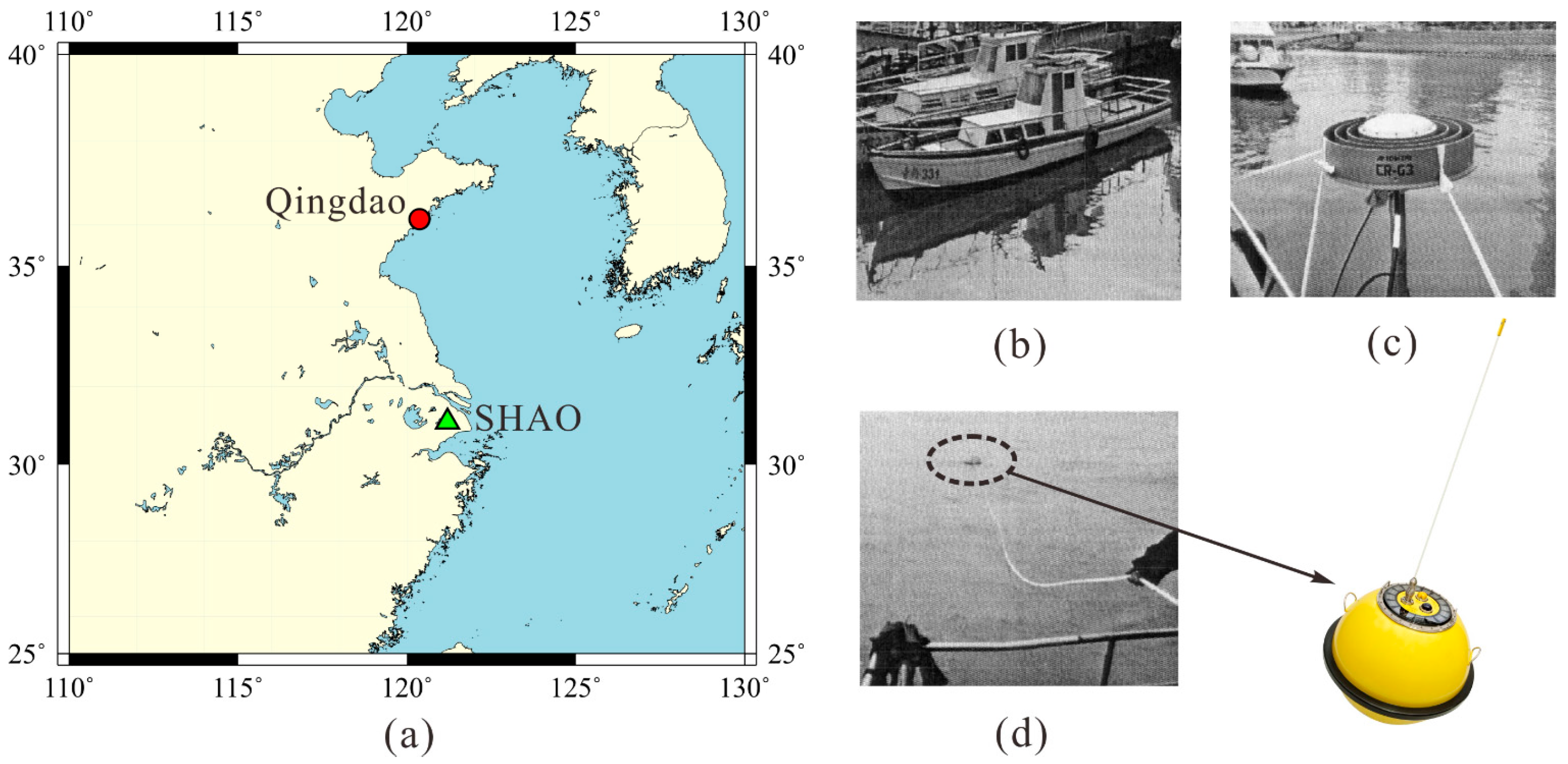
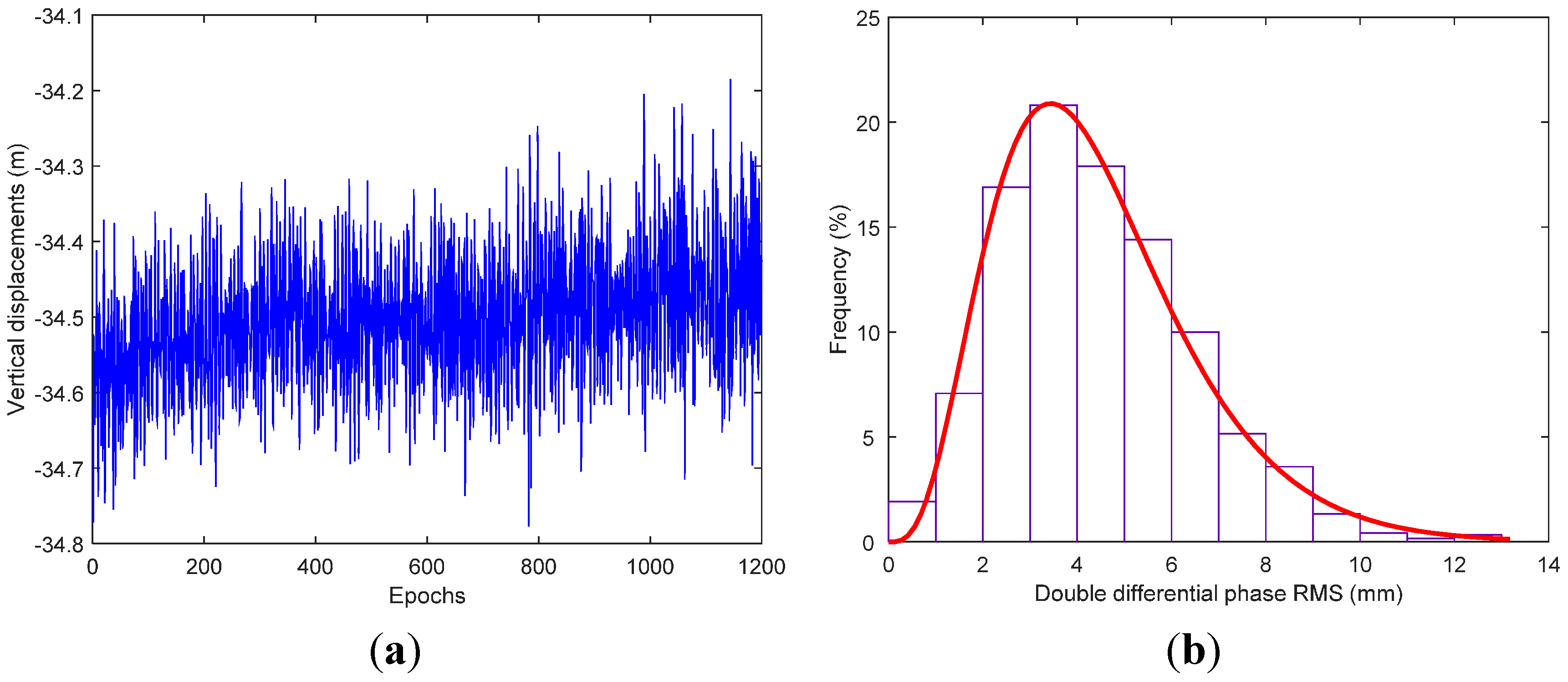
4.1. Computation of the Vertical Carrier Displacements

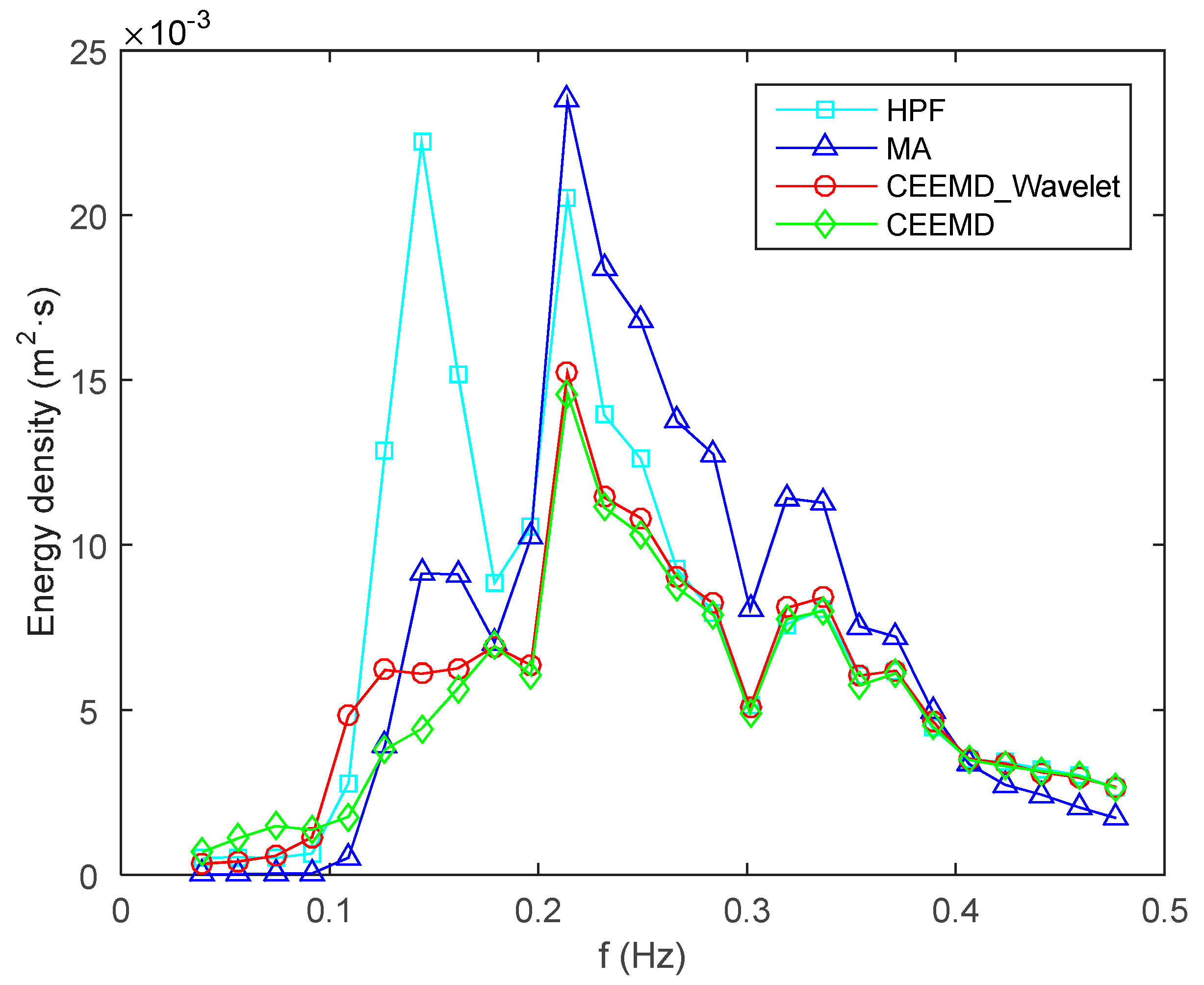
4.2. Validation of Wave Spectra and Parameters




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Wave Gauge | HPF | MA | CEEMD | CEEMD-Wavelet |
|---|---|---|---|---|---|
| 0.34 | 0.3626 | 0.3593 | 0.3073 | 0.3179 | |
| 3.38 | 3.8667 | 3.6271 | 3.5191 | 3.5722 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pitchai, K.P.; Osalusi, E.; Ruscoe, J.P.; Side, J.C.; Harris, R.E.; Kerr, S.; Bullen, C.R. An overview of recent technologies on wave and current measurement in coastal and marine applications. J. Oceanogr. Mar. Sci. 2010, 1, 1–10. [Google Scholar]
- Doong, D.-J.; Lee, B.-C.; Kao, C.C. Wave measurements using gps velocity signals. Sensors 2011, 11, 1043–1058. [Google Scholar] [CrossRef] [PubMed]
- Herbers, T.H.C.; Jessen, P.F.; Janssen, T.T.; Colbert, D.B.; MacMahan, J.H. Observing ocean surface waves with gps-tracked buoys. J. Atmos. Ocean. Technol. 2012, 29, 944–959. [Google Scholar] [CrossRef]
- Krogstad, H.E.; Barstow, S.F.; Aasen, S.E.; Rodriguez, I. Some recent developments in wave buoy measurement technology. Coast. Eng. 1999, 37, 309–329. [Google Scholar] [CrossRef]
- Yoo, Y.; Hou, D.; Kouguchi, N.; Ishida, H.; Shiotani, S.; Fujii, H.; Deguchi, I. Arrayed gps-buoys wave observation system. In Proceedings of the OCEANS’04 Marine Technology Society (MTS)/IEEE TECHNO-OCEAN’04, Kobe, Japan, 9–12 November 2004; pp. 1370–1375.
- Nagai, T.; Shimizu, K.; Sasaki, M.; Murakami, A. Characteristics of the observed offshore wave data by the gps buoys. In Proceedings of the OCEANS 2008 Marine Technology Society (MTS)/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 235–241.
- Hayashi, Y. Empirical relationship of tsunami height between offshore and coastal stations. Earth Planets Sp. 2010, 62, 269–275. [Google Scholar] [CrossRef]
- Kawai, H.; Satoh, M.; Kawaguchi, K.; Seki, K. 2010 chile and 2011 tohoku tsunami profiles measured by gps buoys and coastal wave and tide gauges in a nationwide ocean wave information network for ports and harbors. J. Waterw. Port Coast.Ocean Eng. 2014, 140, 135–145. [Google Scholar] [CrossRef]
- De Vries, J.J.; Waldron, J.; Cunningham, V. Field tests of the new datawell DWR-G GPS wave buoy. Sea Technol. 2003, 44, 50–55. [Google Scholar]
- Hou, D.; Hamada, M.; Yoo, Y.-J.; Kouguchi, N. Evaluation test result on wave direction measurement using gps buoy. In Proceedings of the OCEANS'06 Asia Pacific IEEE, Singapore, 16–19 May 2006; pp. 359–363.
- Akiyoshi, G.; Kouguchi, N. Wave information by precise velocity measurement using gps buoy. In Proceedings of the OCEANS 2012 Marine Technology Society (MTS)/IEEE Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–6.
- Patra, S.K.; Jena, B.K. Inter-comparison of wave measurement by accelerometer and GPS wave buoy in shallow water off cuddalore, east coast of india. Indian J. Geo Mar. Sci. 2014, 43, 45–49. [Google Scholar]
- Bender, L.C.; Howden, S.D.; Dodd, D.; Guinasso, N.L. Wave heights during hurricane katrina: An evaluation of PPP and PPK measurements of the vertical displacement of the GPS antenna. J. Atmos. Ocean. Technol. 2010, 27, 1760–1768. [Google Scholar] [CrossRef]
- Joodaki, G.; Nahavandchi, H.; Cheng, K. Ocean wave measurement using GPS buoys. J. Geod. Sci. 2013, 3, 163–172. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.L.C.; Shih, H.H.; Zheng, Q.N.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical mode decomposition as a filter bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef]
- Wu, Z.H.; Huang, N.E. A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. A Math. Phys. Eng. Sci. 2004, 460, 1597–1611. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Prague, Czech, 22–27 May 2011; pp. 4144–4147.
- Datawell > Products > Buoys. Available online: http://www.datawell.nl/Products/Buoys.aspx (accessed on 13 June 2015).
- Shan, R. Study of Sea Wave and Tide Measurements Based on GPS Velocity Estimation. Master’s Thesis, Shandong University of Science and Technolog, Qingdao, China, 2010. [Google Scholar]
- Herring, T.; King, R.; McClusky, S. GAMIT/GLOBK Reference Manuals, Release 10.4; Massachusetts Institute of Technology: Cambridge, MA, USA, 2010. [Google Scholar]
- Avallone, A.; D’Anastasio, E.; Serpelloni, E.; Latorre, D.; Cavaliere, A.; D’Ambrosio, C.; Del Mese, S.; Massucci, A.; Cecere, G. High-rate (1 Hz to 20 Hz) gps coseismic dynamic displacements carried out during the emilia 2012 seismic sequence. Ann. Geophys. 2012, 55, 773–779. [Google Scholar]
- Bertiger, W.; Desai, S.; Haines, B.; Harvey, N.; Moore, A.; Owen, S.; Weiss, J. Single receiver phase ambiguity resolution with GPS data. J. Geod. 2010, 84, 327–337. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; He, X.; Ferreira, V.G. Ocean Wave Separation Using CEEMD-Wavelet in GPS Wave Measurement. Sensors 2015, 15, 19416-19428. https://doi.org/10.3390/s150819416
Wang J, He X, Ferreira VG. Ocean Wave Separation Using CEEMD-Wavelet in GPS Wave Measurement. Sensors. 2015; 15(8):19416-19428. https://doi.org/10.3390/s150819416
Chicago/Turabian StyleWang, Junjie, Xiufeng He, and Vagner G. Ferreira. 2015. "Ocean Wave Separation Using CEEMD-Wavelet in GPS Wave Measurement" Sensors 15, no. 8: 19416-19428. https://doi.org/10.3390/s150819416
APA StyleWang, J., He, X., & Ferreira, V. G. (2015). Ocean Wave Separation Using CEEMD-Wavelet in GPS Wave Measurement. Sensors, 15(8), 19416-19428. https://doi.org/10.3390/s150819416