In this section, the experimental results are presented, and the performance of the configuration considered is analyzed in terms of accuracy and availability. Three parameters are used for the evaluation of the accuracy; specifically, SD, maximum and mean errors. The metrics are computed for horizontal and vertical components of the position and velocity solutions. The continuity of the navigation solution is assessed using two different parameters; specifically, the SA and reliable availability (RA) depending on the application or not of RAIM techniques. The first one is the time percentage when the solution is computed: this parameter is used for the configuration without RAIM; whereas the RA is the percentage of time when the solution is computed and declared reliable: this parameter is used when the RAIM algorithms are performed.
5.1. Positioning Results
In this section, the results obtained in the position domain are presented.
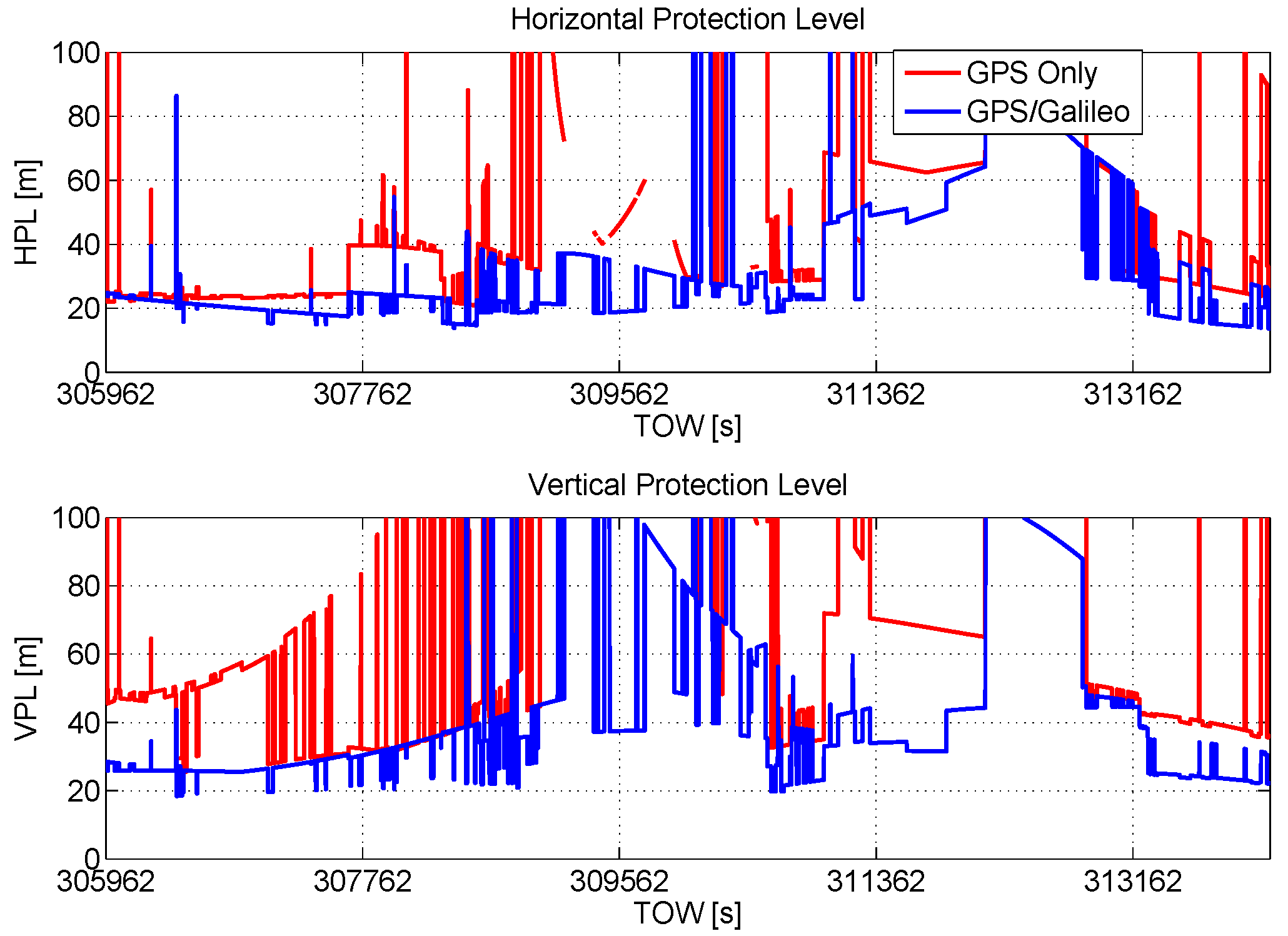
Two of the outputs of the RAIM algorithm are the horizontal protection limit (HPL) and vertical protection limit (VPL) defined in [
1]. In order to demonstrate the benefits of Galileo inclusion, HPL and VPL are plotted as a function of time in the upper and lower boxes of
Figure 3. The improvements due to the Galileo inclusion clearly emerge from
Figure 3: both HPL and VPL are lower than in the GPS-only case.
Figure 3.
Horizontal protection limit (HPL) and vertical protection limit (VPL) as a function of time. Benefits of the inclusion of Galileo measurements in terms of HPL and VPL.
Figure 3.
Horizontal protection limit (HPL) and vertical protection limit (VPL) as a function of time. Benefits of the inclusion of Galileo measurements in terms of HPL and VPL.
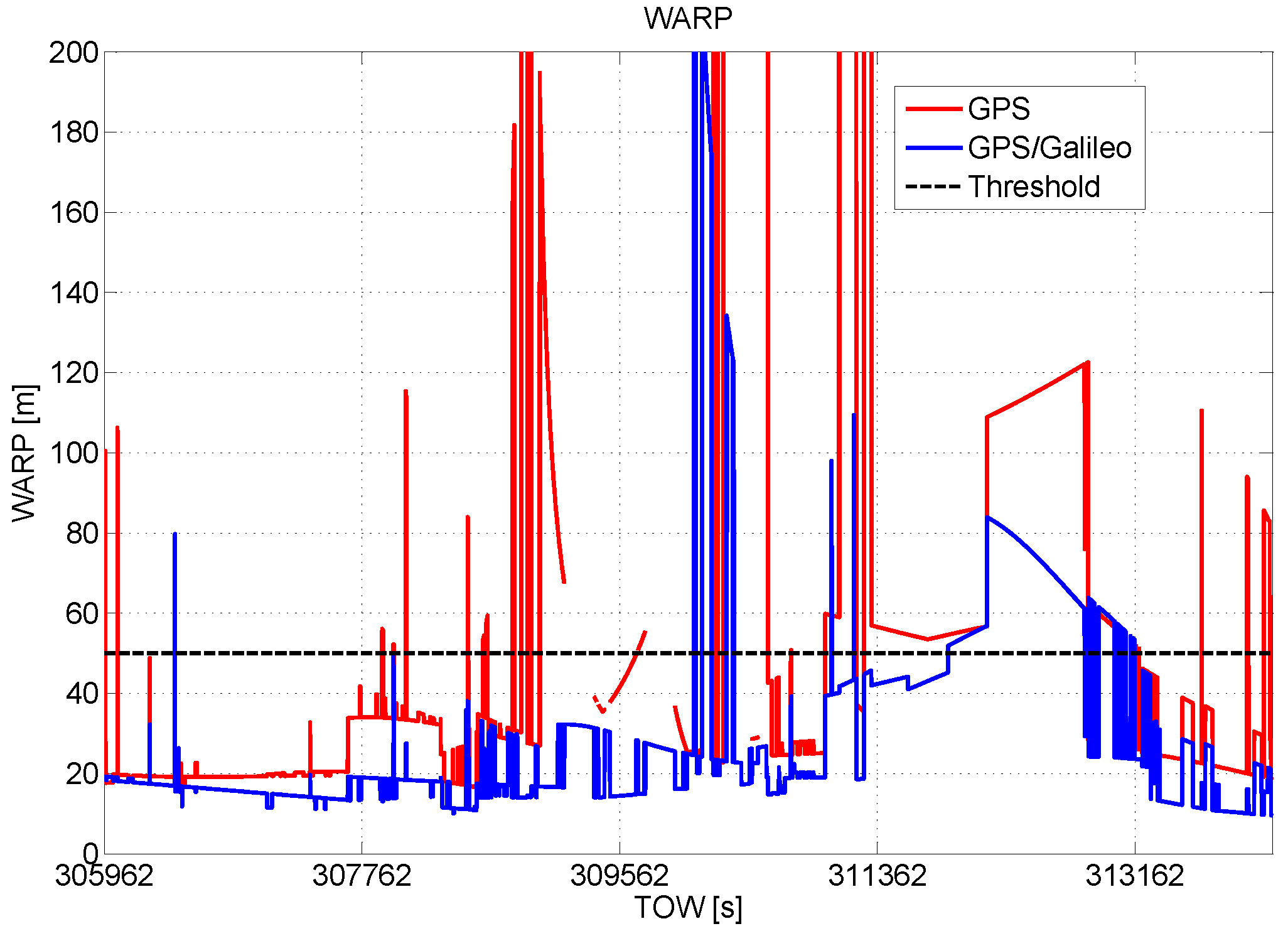
In
Figure 4, the WARP values are plotted as a function of time and with respect to the threshold,
. The benefits of the introduction of the Galileo observables are evident as for the HPL and VPL cases.
Figure 4.
Weighted approximate radial-error protected (WARP) as a function of time. Benefits of the inclusion of Galileo measurements.
Figure 4.
Weighted approximate radial-error protected (WARP) as a function of time. Benefits of the inclusion of Galileo measurements.
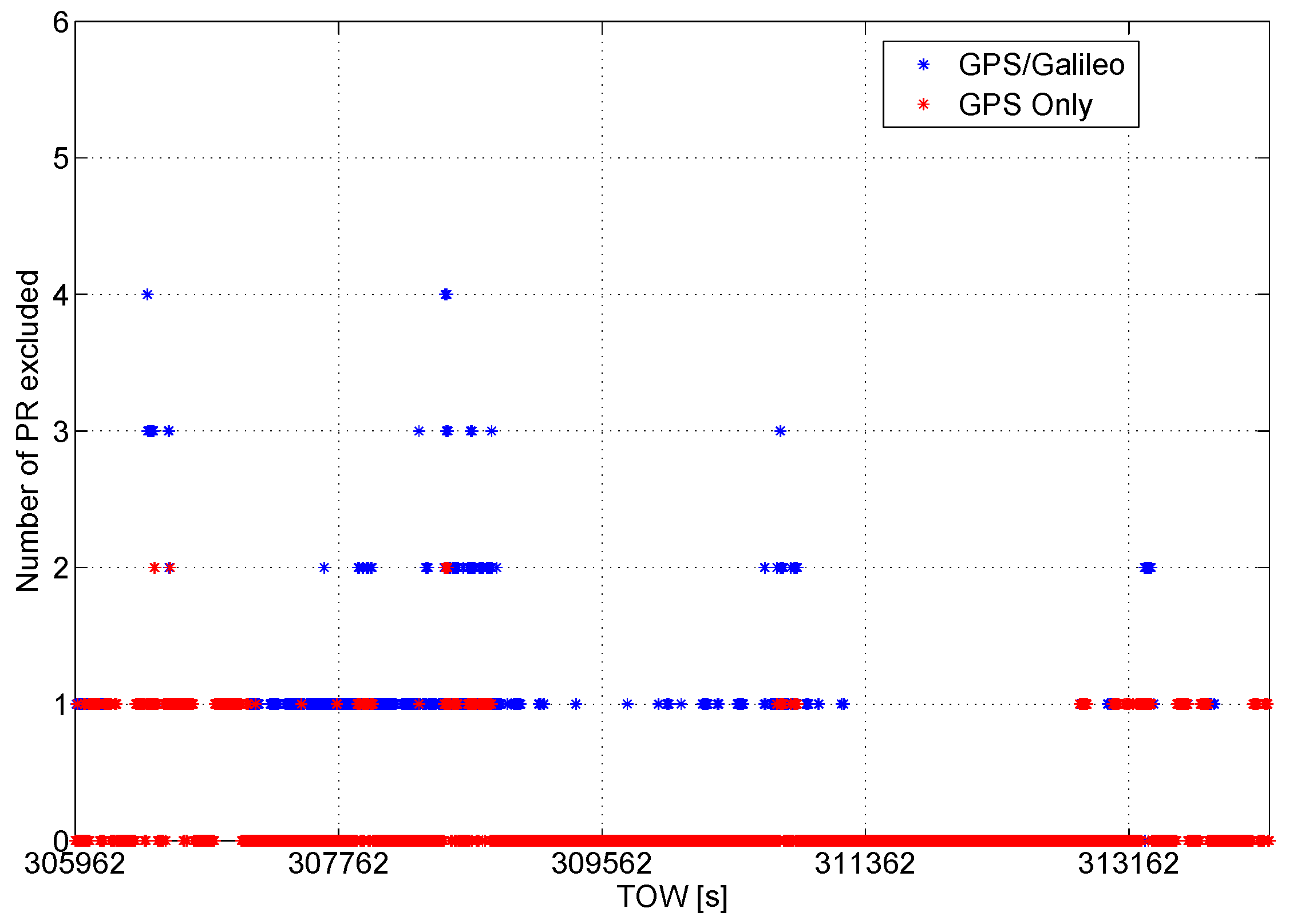
The introduction of the Galileo measurements provides an enhancement of the redundancy of the system; this is a key enabler for the improvements of the performance of the RAIM algorithm. The enhanced redundancy allows the rejection of a higher number of measurements affected by gross errors. The number of pseudoranges excluded epoch by epoch is shown in
Figure 5: in the multi-constellation, case a higher number of outliers can be identified and rejected.
Figure 5.
Number of pseudoranges excluded epoch by epoch. More exclusions can be performed when the multi-constellation approach is adopted.
Figure 5.
Number of pseudoranges excluded epoch by epoch. More exclusions can be performed when the multi-constellation approach is adopted.
The SA for the data collection in the case of GPS alone assumes a high value, about
. The inclusion of the Galileo measurements enhances the SA, and almost no outages are present in the multi-constellation solution. The application of the RAIM algorithm reduces the availability of the solution, specifically the RA, that in the GPS-only case is more than halved with respect to the SA. When the RAIM algorithm is applied, the benefit of the inclusion of the Galileo measurements is more evident; the RA in the case of the multi-constellation solution is almost twice that of the single system case and passes from
to
. The results related to the SA and RA of the position solution are detailed in
Table 2.
Table 2.
Solution availability (SA) and reliable availability (RA) of the different solutions. GG, GPS and Galileo.
Table 2.
Solution availability (SA) and reliable availability (RA) of the different solutions. GG, GPS and Galileo.
| Configuration | SA (%) | RA (%) |
|---|
| GPS noRAIM | 95 | N.A. |
| GG noRAIM | 100 | N.A. |
| GPS RAIM | 95 | 43 |
| GG RAIM | 100 | 78 |
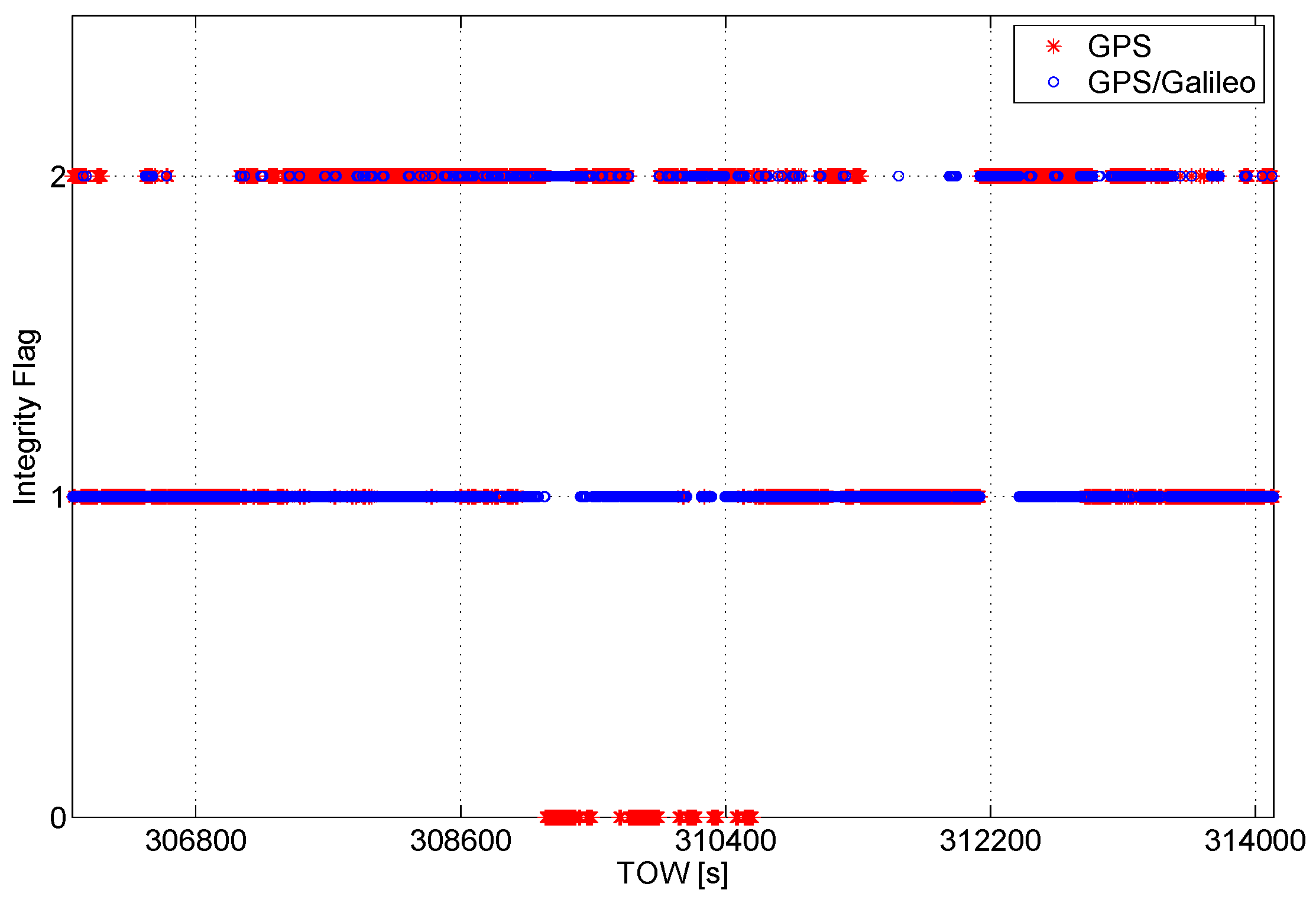
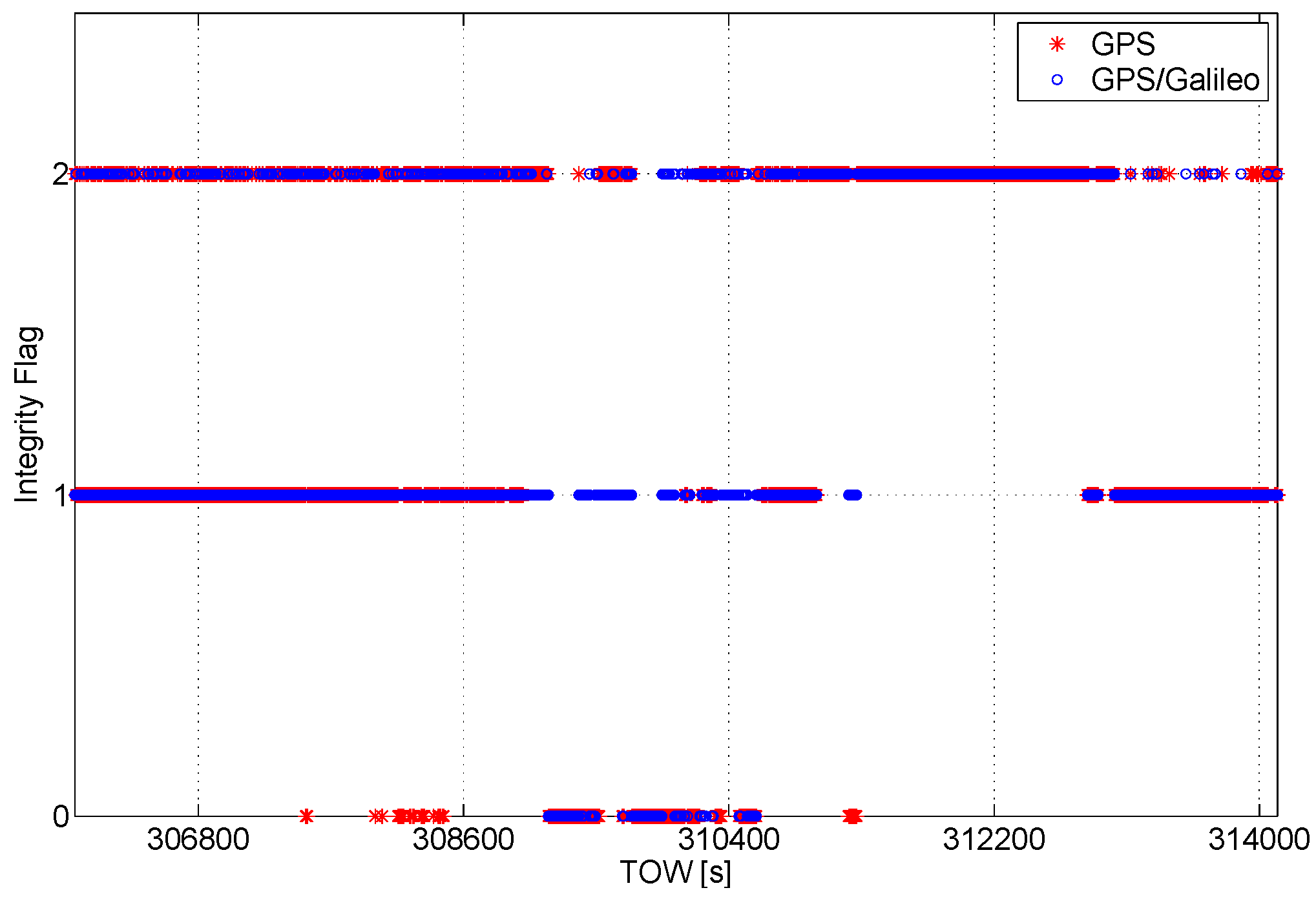
The integrity algorithm output is a flag indicating the status of the solution; specifically, if the solution is declared reliable, the flag is set to one. If there is no redundancy to apply the RAIM algorithm or if the geometry conditions are not satisfied, the flag is set to zero. Finally, if the solution is declared unreliable, the flag is set to two. The flag values are plotted as a function of time in
Figure 6. Only during a short period of time, the solution is not available for the GPS-only case.
Figure 6.
Integrity flag as a function of time. The flag is set to zero when it is not possible to test the reliability of the solution, and one implies a reliable solution, while two indicates an unreliable solution.
Figure 6.
Integrity flag as a function of time. The flag is set to zero when it is not possible to test the reliability of the solution, and one implies a reliable solution, while two indicates an unreliable solution.
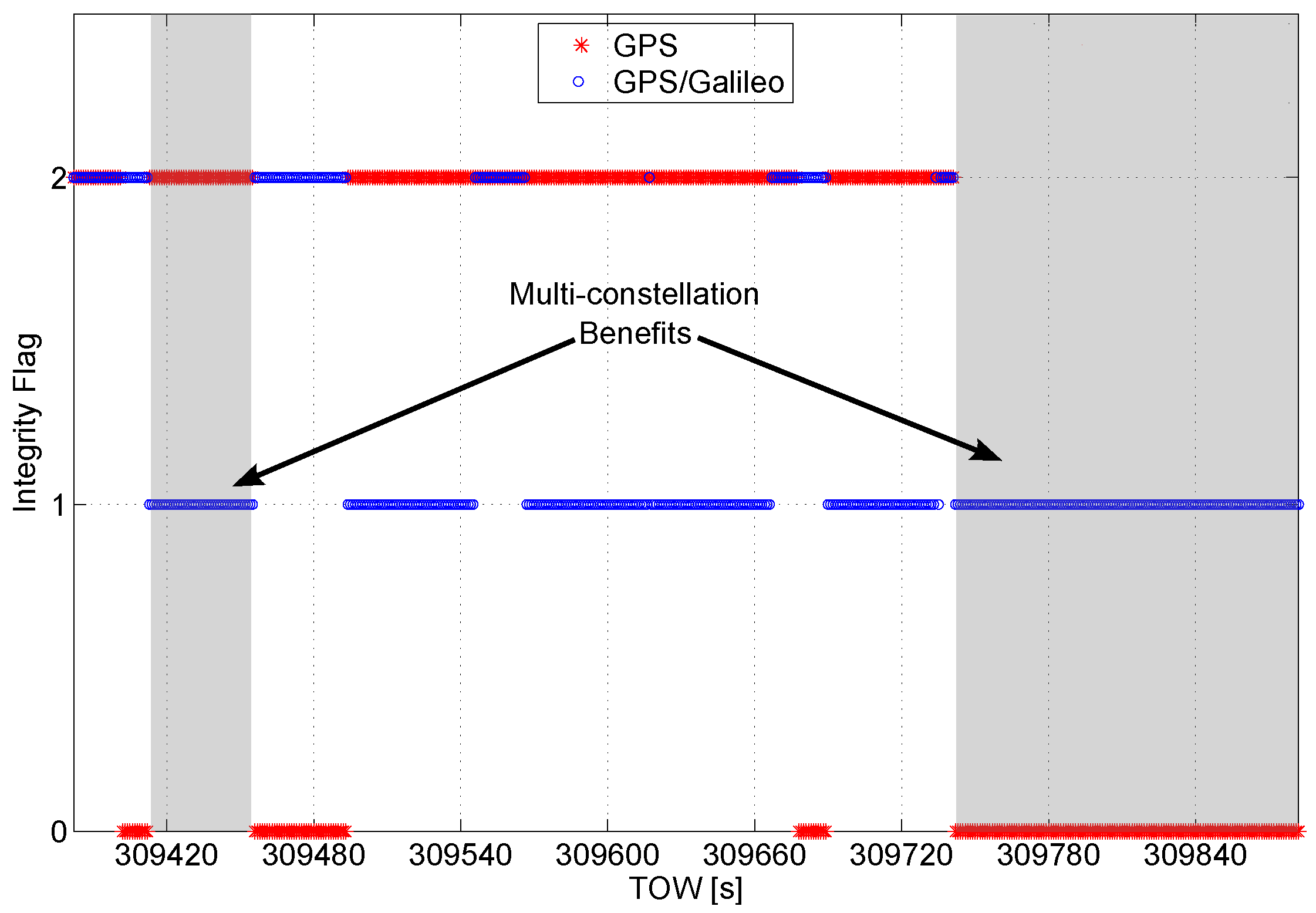
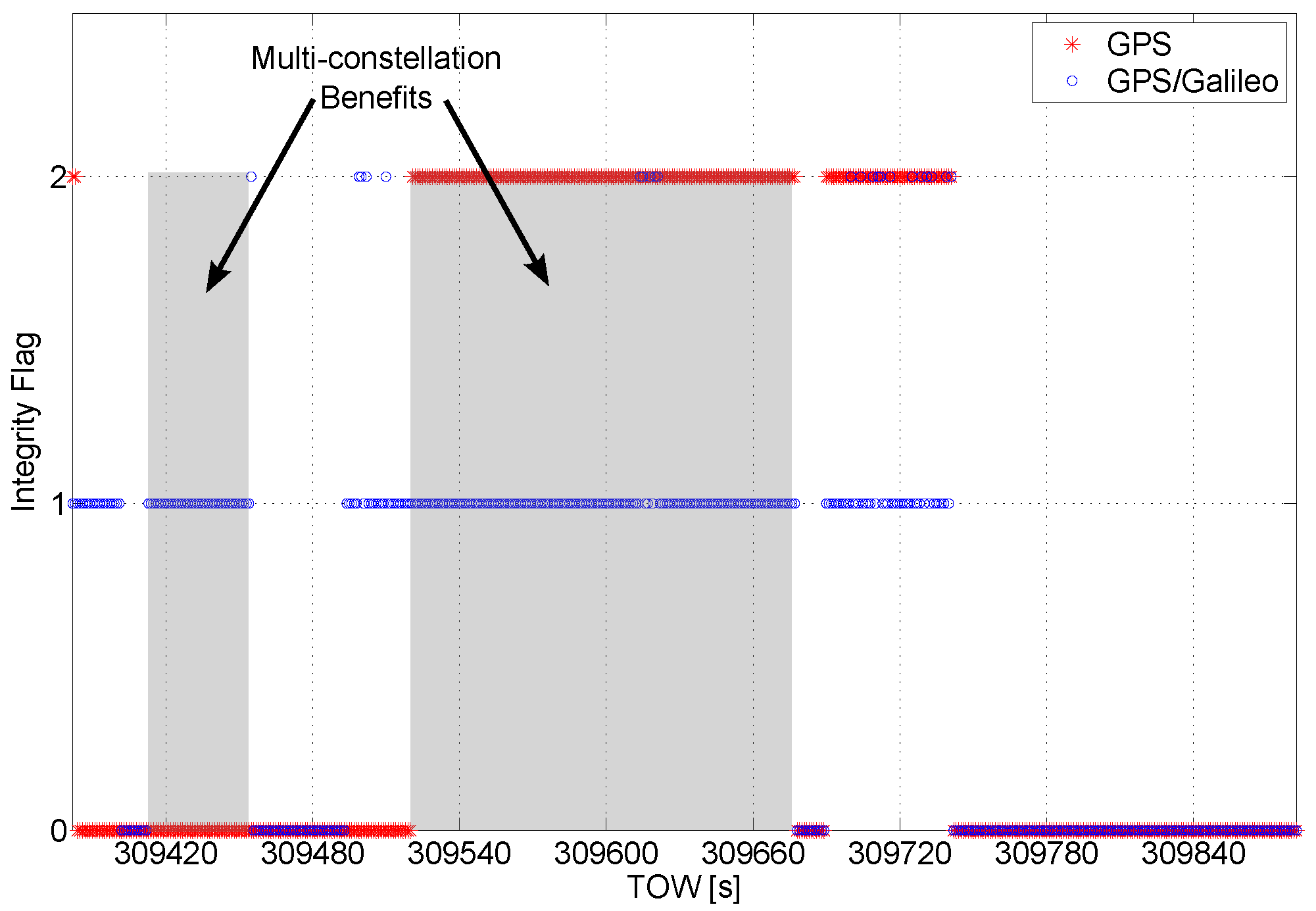
Figure 7.
Integrity flag as a function of time. A short interval of the data is considered to better analyze the benefits of the multi-constellation.
Figure 7.
Integrity flag as a function of time. A short interval of the data is considered to better analyze the benefits of the multi-constellation.
In
Figure 7, a short time interval of the data collection is considered, and the values of the flag are plotted as a function of time. The benefits of the multi-constellation approach clearly emerge from the figure: in the grey box on the left, the solution passes from unreliable, for the GPS only case, to reliable for the multi-constellation case. In the box on the right, the solution passes from unavailable to reliable.
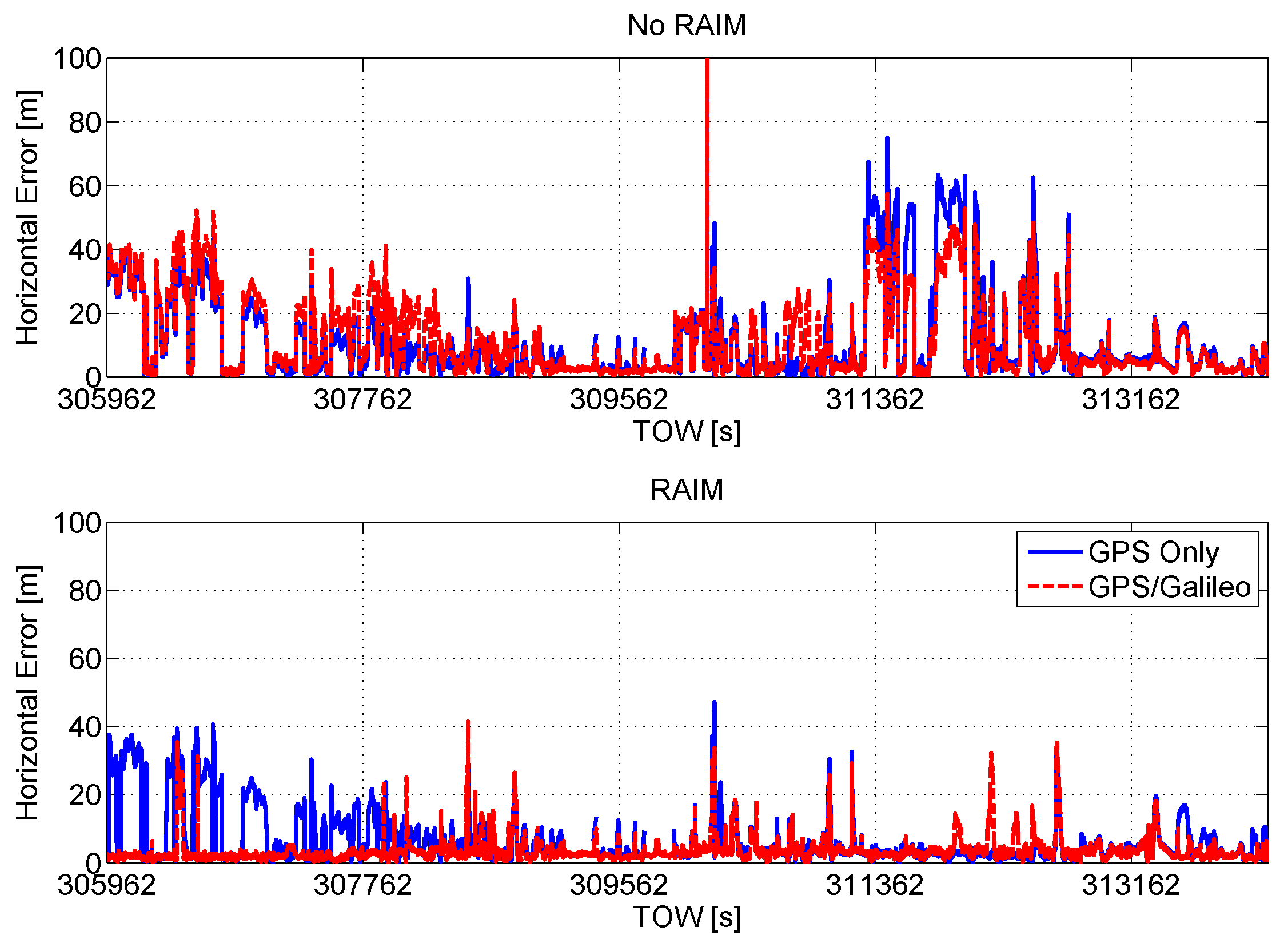
The horizontal position errors are plotted as a function of time in
Figure 8. In the upper box, the error of the configuration without RAIM application is shown. The presence of gross error in the position solution emerges from the figure: the inclusion of the Galileo measurements provides only a slight reduction of the error, and in a few cases, the inclusion of the measurements provided by Galileo satellites degrades the navigation solution. This is due to the additional blunders present in the measurement set. In the lower box, the horizontal position errors of the configurations with RAIM are shown. Furthermore, in this case, the benefits of the multi-constellation approach clearly emerge: the red line is lower than the blue one.
Figure 8.
Horizontal error as a function of time. Upper box: horizontal position errors of the configuration without RAIM application; lower box: horizontal position errors of the configurations with RAIM.
Figure 8.
Horizontal error as a function of time. Upper box: horizontal position errors of the configuration without RAIM application; lower box: horizontal position errors of the configurations with RAIM.
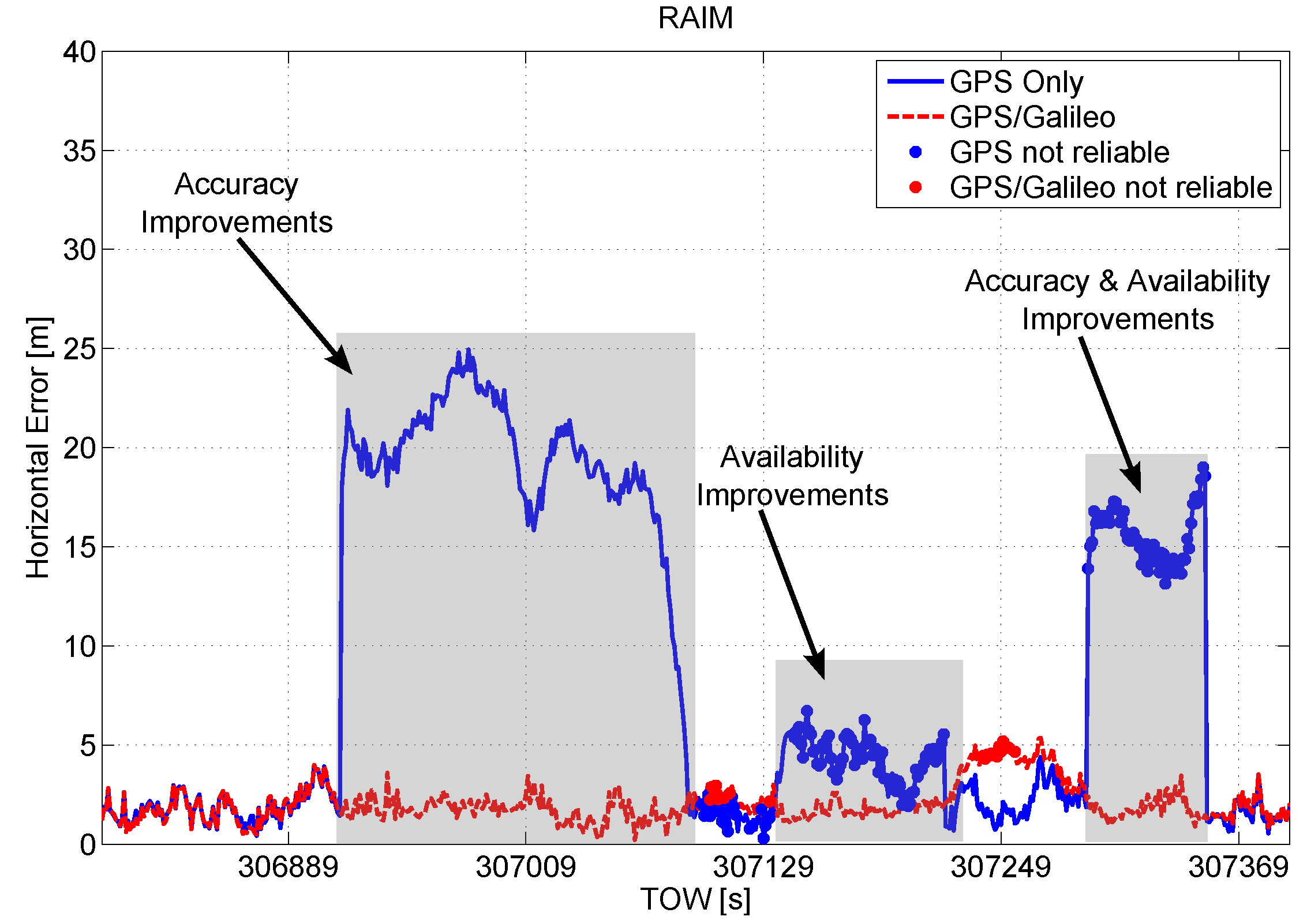
In order to further analyze the performance of the configurations with RAIM, a short time interval of the test is considered in
Figure 9, where the horizontal position errors are plotted as a function of time. The synergy between the GPS/Galileo multi-constellation solution and the implemented RAIM algorithm provides clear benefits. In particular, in the first grey box, the introduction of the Galileo measurements allows the proper identification of blunders within the GPS measurements improving the accuracy of the navigation solution. From the central grey box, improvements in terms of RA can be noted. Finally, in the grey box on the right, the navigation accuracy is improved and the solution passes from unreliable to reliable when Galileo measurements are included.
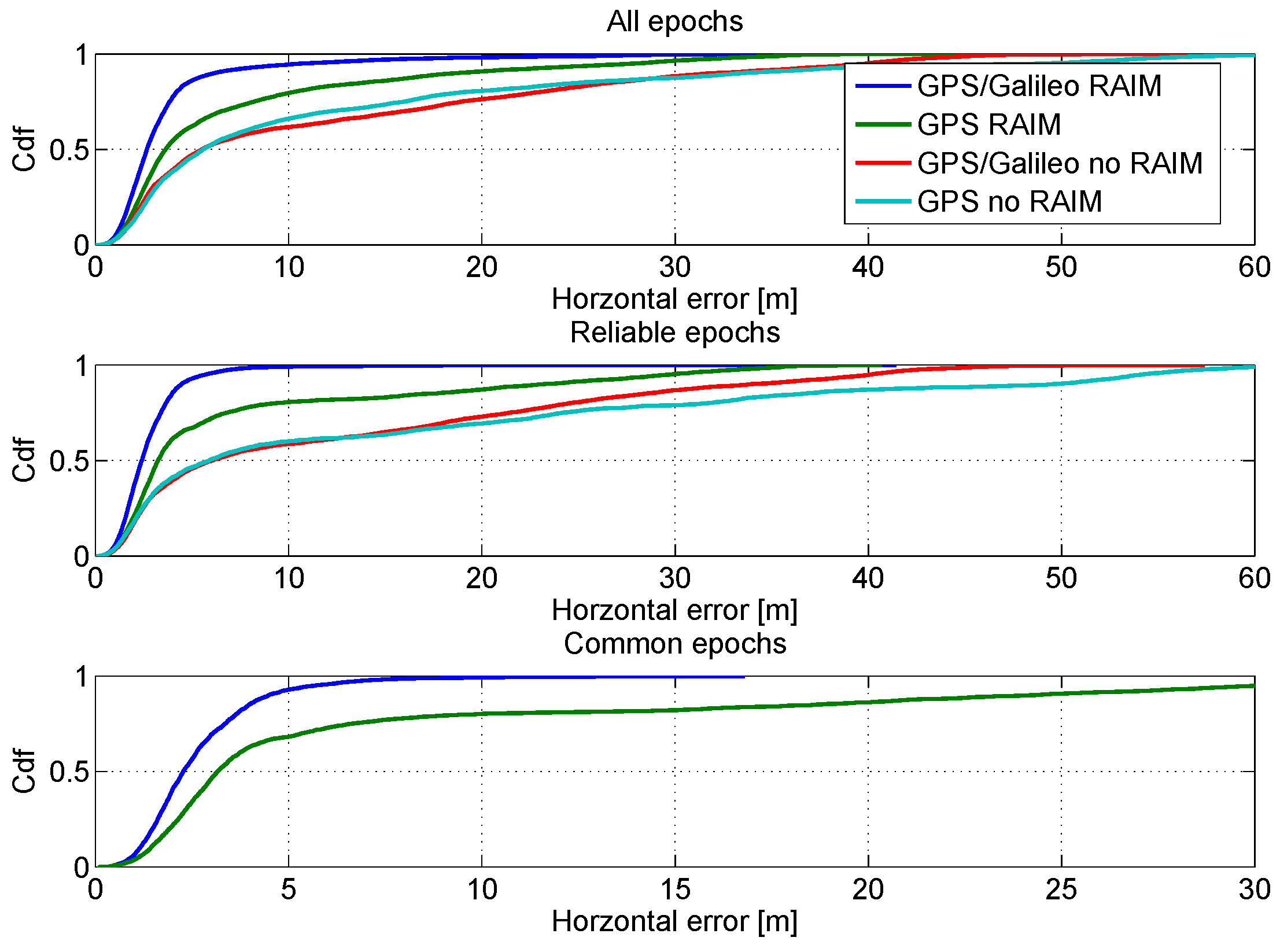
In order to have a more clear representation of the performance in the horizontal channel, the CDFs of the horizontal errors are shown in
Figure 10. In the upper box, the CDFs of the horizontal position errors are computed using all the epochs; the impact of the RAIM algorithm clearly emerges from the figure: the blue and green lines are higher than the other lines. The advantages are more evident in the central box, where the CDFs are computed using only the reliable epochs. Finally, in the lower box of
Figure 10 the comparison between GPS and GPS/Galileo multi-constellation is performed using only the common epochs. The benefits of the introduction of the Galileo measurements clearly emerge from the figure: the blue line is higher than the green one.
Figure 9.
Horizontal error as a function of time. A short time interval of the test is considered to investigate the performance of the configurations with RAIM application.
Figure 9.
Horizontal error as a function of time. A short time interval of the test is considered to investigate the performance of the configurations with RAIM application.
Figure 10.
CDFs of the horizontal errors. Upper box: CDFs of the horizontal position errors computed using all epochs; central box: CDFs computed using only the reliable epochs; lower box: CDFs computed using only common epochs.
Figure 10.
CDFs of the horizontal errors. Upper box: CDFs of the horizontal position errors computed using all epochs; central box: CDFs computed using only the reliable epochs; lower box: CDFs computed using only common epochs.
In
Figure 11, the vertical position errors are plotted as a function of time. In the upper box of the figure, the vertical errors of the configurations without RAIM are plotted; the introduction of the Galileo measurements without quality control provides only a slight improvement, since the blue and red lines in
Figure 11 are very close. In the lower box of
Figure 11, the vertical position errors of the configurations with the RAIM application are shown. The inclusion of Galileo observables and the use of the RAIM technique have a clear impact on the system performance. GPS/Galileo multi-constellation solutions are characterized by significantly reduced errors.
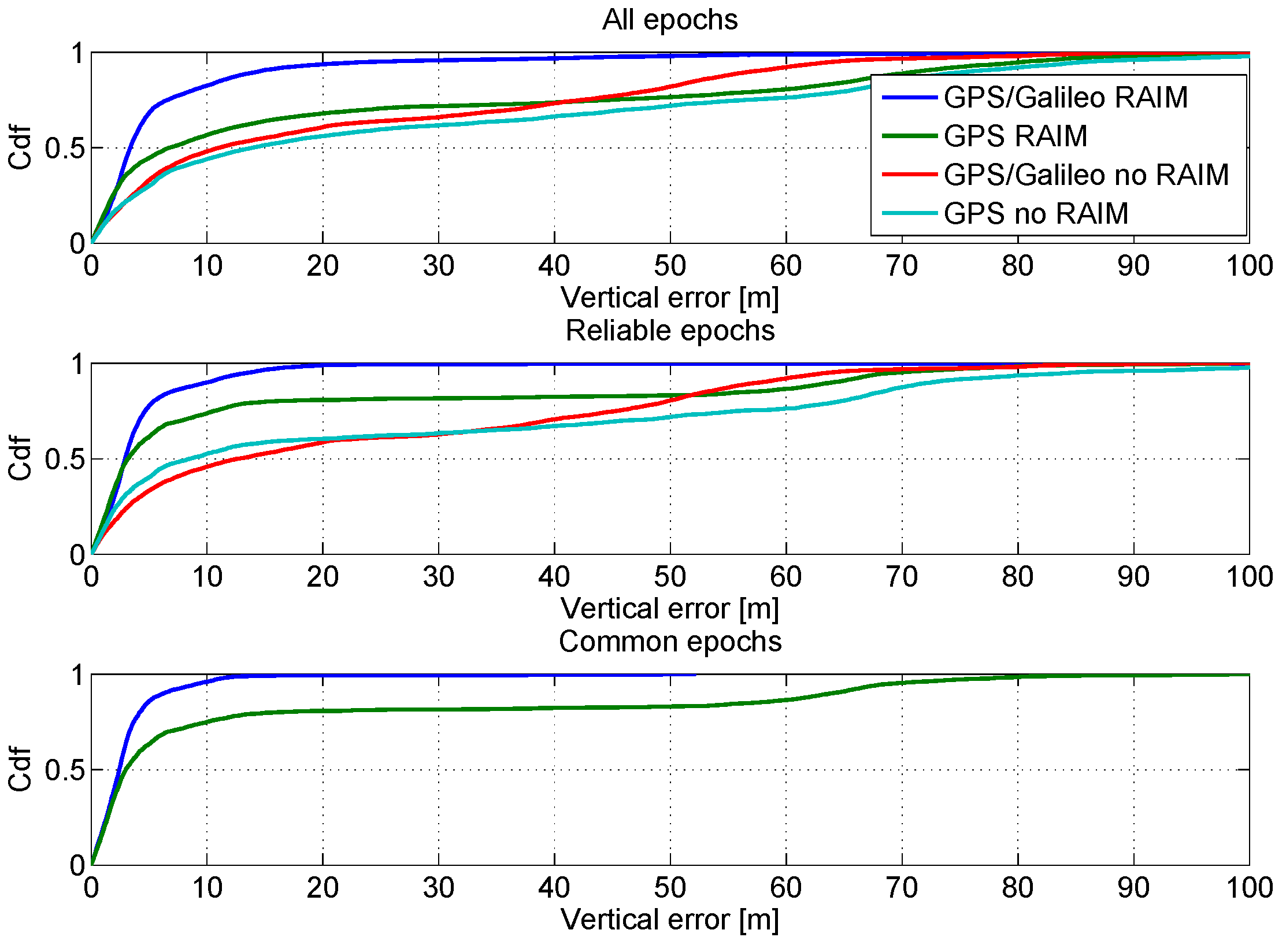
The CDFs of the vertical position errors of the four configurations considered are shown in
Figure 12. In the upper box of the figure, the CDFs are computed using all available epochs: three of the four configurations,
i.e., GPS noRAIM, GPS RAIM and GG noRAIM, have similar performance with only a slight improvement in the GPS RAIM case. However, the GPS/Galileo multi-constellation solution with RAIM application provides the best solution by far. A little improvement in the performance of the GPS RAIM configuration is obtained when the CDF is computed using only reliable epochs, as shown in the central box of
Figure 12. In order to have a fair comparison between GPS/Galileo and GPS only solutions, the CDFs are computed using only the reliable epochs in the lower box of
Figure 12. The enhancements due to the Galileo measurements clearly emerge from the comparison.
Figure 11.
Vertical position error as a function of time. Upper box: vertical errors of the configuration without RAIM application; lower box: vertical errors of the configurations with RAIM.
Figure 11.
Vertical position error as a function of time. Upper box: vertical errors of the configuration without RAIM application; lower box: vertical errors of the configurations with RAIM.
Figure 12.
CDFs of the vertical position errors. Upper box: CDFs of the vertical errors computed using all epochs; central box: CDFs computed using only the reliable epochs; lower box: CDFs computed using only common epochs.
Figure 12.
CDFs of the vertical position errors. Upper box: CDFs of the vertical errors computed using all epochs; central box: CDFs computed using only the reliable epochs; lower box: CDFs computed using only common epochs.
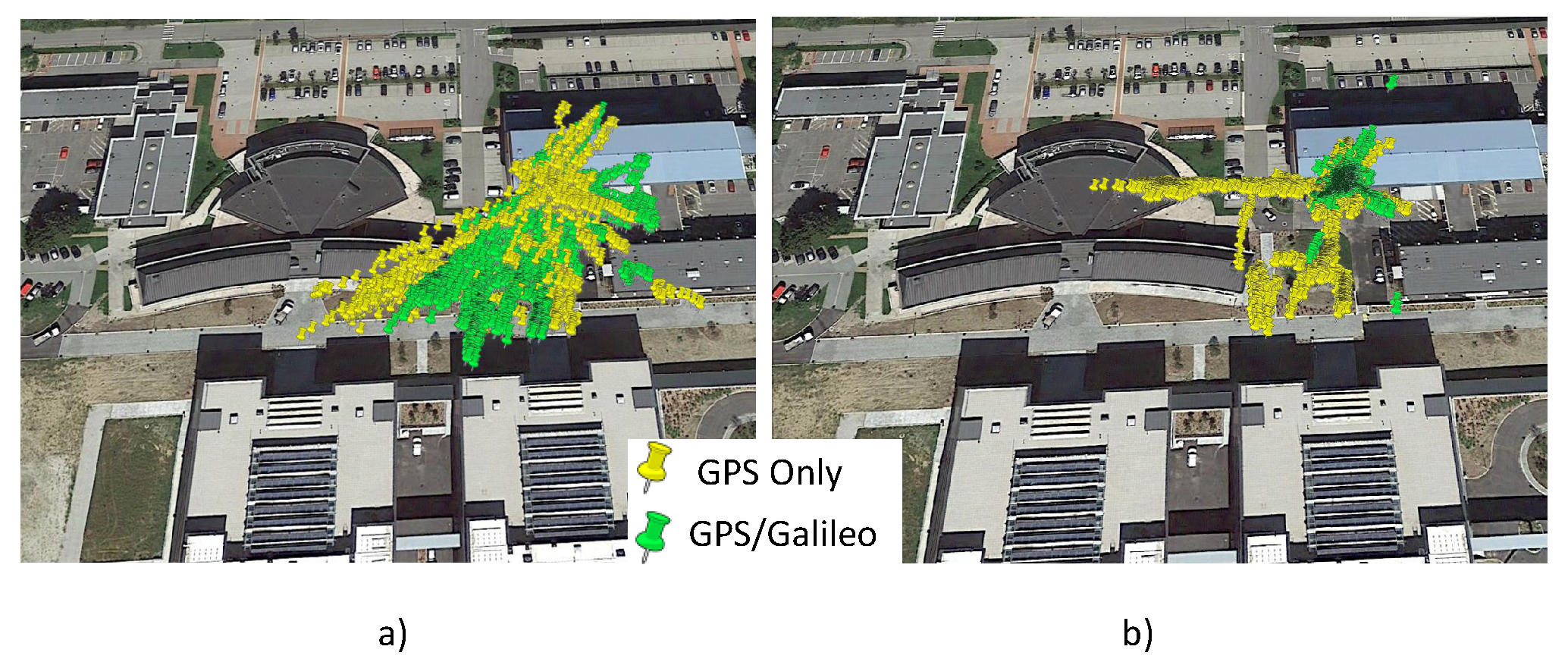
The horizontal position scatter plots of the configurations analyzed are shown in
Figure 13. In
Figure 13a, the dispersion of the configurations without RAIM are plotted, whereas the horizontal positions provided by the configurations with the RAIM application are shown in
Figure 13b. From the figures, the improvements of the RAIM application are evident: the clouds in
Figure 13b are more concentrated than the ones in
Figure 13a. The benefits of the Galileo measurements’ introduction are even more clear: in both cases, the green clouds are more concentrated than in the yellow ones.
Figure 13.
Horizontal position solutions computed using the configurations analyzed. (a) Position solutions computed using the configurations without RAIM; (b) position solutions computed using the configurations with RAIM.
Figure 13.
Horizontal position solutions computed using the configurations analyzed. (a) Position solutions computed using the configurations without RAIM; (b) position solutions computed using the configurations with RAIM.
The parameters used to summarize the performance of the configurations considered are the maximum, mean and SD of the horizontal and vertical errors. The parameters are computed for the four configurations and are reported in
Table 3,
Table 4 and
Table 5. In
Table 3, the parameters are computed using all available epochs; in
Table 4, only reliable epochs are considered; and finally, in
Table 5, only common reliable epochs are used. In all cases, the synergy between GPS/Galileo and the RAIM algorithm achieves the best performance with the lowest error values.
Table 3.
Position error statistics considering the different solutions and all epochs.
Table 3.
Position error statistics considering the different solutions and all epochs.
| Configuration | Max H (m) | Max up (m) | SD H (m) | SD up (m) | Mean H (m) | Mean up (m) |
|---|
| GPS noRAIM | 400.02 | 514.23 | 16.02 | 32.32 | 12.09 | 29.70 |
| GG noRAIM | 387.12 | 542.52 | 14.33 | 26.59 | 12.08 | −21.12 |
| GPS RAIM | 47.28 | 127.89 | 8.05 | 29.06 | 7.10 | 22.91 |
| GG RAIM | 41.47 | 143.43 | 4.15 | 13.06 | 3.74 | −4.75 |
Table 4.
Position error statistics considering only reliable epochs.
Table 4.
Position error statistics considering only reliable epochs.
| Configuration | Max H (m) | Max up (m) | SD H (m) | SD up (m) | Mean H (m) | Mean up (m) |
|---|
| GPS noRAIM | 75.10 | 123.00 | 17.65 | 31.32 | 15.44 | 27.27 |
| GG noRAIM | 57.40 | 101.57 | 12.90 | 24.93 | 12.72 | 22.22 |
| GPS RAIM | 40.71 | 106.96 | 8.94 | 24.52 | 7.25 | 15.08 |
| GG RAIM | 41.44 | 125.49 | 2.00 | 7.35 | 2.78 | −2.86 |
Table 5.
Position error statistics considering only common reliable epochs.
Table 5.
Position error statistics considering only common reliable epochs.
| Configuration | Max H (m) | Max up (m) | SD H (m) | SD up (m) | Mean H (m) | Mean up (m) |
|---|
| GPS noRAIM | 75.10 | 123.01 | 17.46 | 31.18 | 15.38 | 26.93 |
| GG noRAIM | 57.40 | 101.57 | 14.79 | 25.61 | 14.84 | −19.84 |
| GPS RAIM | 40.71 | 106.96 | 9.19 | 24.46 | 7.36 | 14.89 |
| GG RAIM | 16.80 | 52.17 | 1.67 | 4.91 | 2.68 | −1.41 |
5.2. Velocity Results
In this section, the results obtained in the velocity domain are presented.
The integrity algorithm is applied to Doppler shift measurements in order to identify blunders that can degrade the velocity solution. One of the outputs is the flag indicating the status of the solution. The integrity flag related to the velocity solutions is plotted as a function of time in
Figure 14. A short time interval of the dataset is analyzed in
Figure 15, which better highlights the benefits of the multi-constellation solution.
Figure 14.
Integrity flag as a function of time. The flag is set to zero when it is not possible to test the reliability of the solution; one implies a reliable solution; two indicates an unreliable solution.
Figure 14.
Integrity flag as a function of time. The flag is set to zero when it is not possible to test the reliability of the solution; one implies a reliable solution; two indicates an unreliable solution.
Figure 15.
Details of the velocity integrity flag around epochs where the GPS-only solution is declared unreliable.
Figure 15.
Details of the velocity integrity flag around epochs where the GPS-only solution is declared unreliable.
Furthermore, in the velocity domain, data are characterized by a high SA, which is
in the case of GPS only: the inclusion of the Galileo measurements improves the SA by about
. The application of the RAIM algorithm reduces the availability of the solution, which in the GPS only case is more than halved passing from
to
; in this case, the benefit of the introduction of the Galileo observables is more evident with an enhancement of
with respect to the GPS-only case. The results related to the SA and RA of the velocity solution are detailed in
Table 6.
Table 6.
SA and RA of the velocity solutions.
Table 6.
SA and RA of the velocity solutions.
| Configuration | SA (%) | RA (%) |
|---|
| GPS noRAIM | 95 | N.A. |
| GG noRAIM | 100 | N.A. |
| GPS RAIM | 95 | 45 |
| GG RAIM | 100 | 62 |
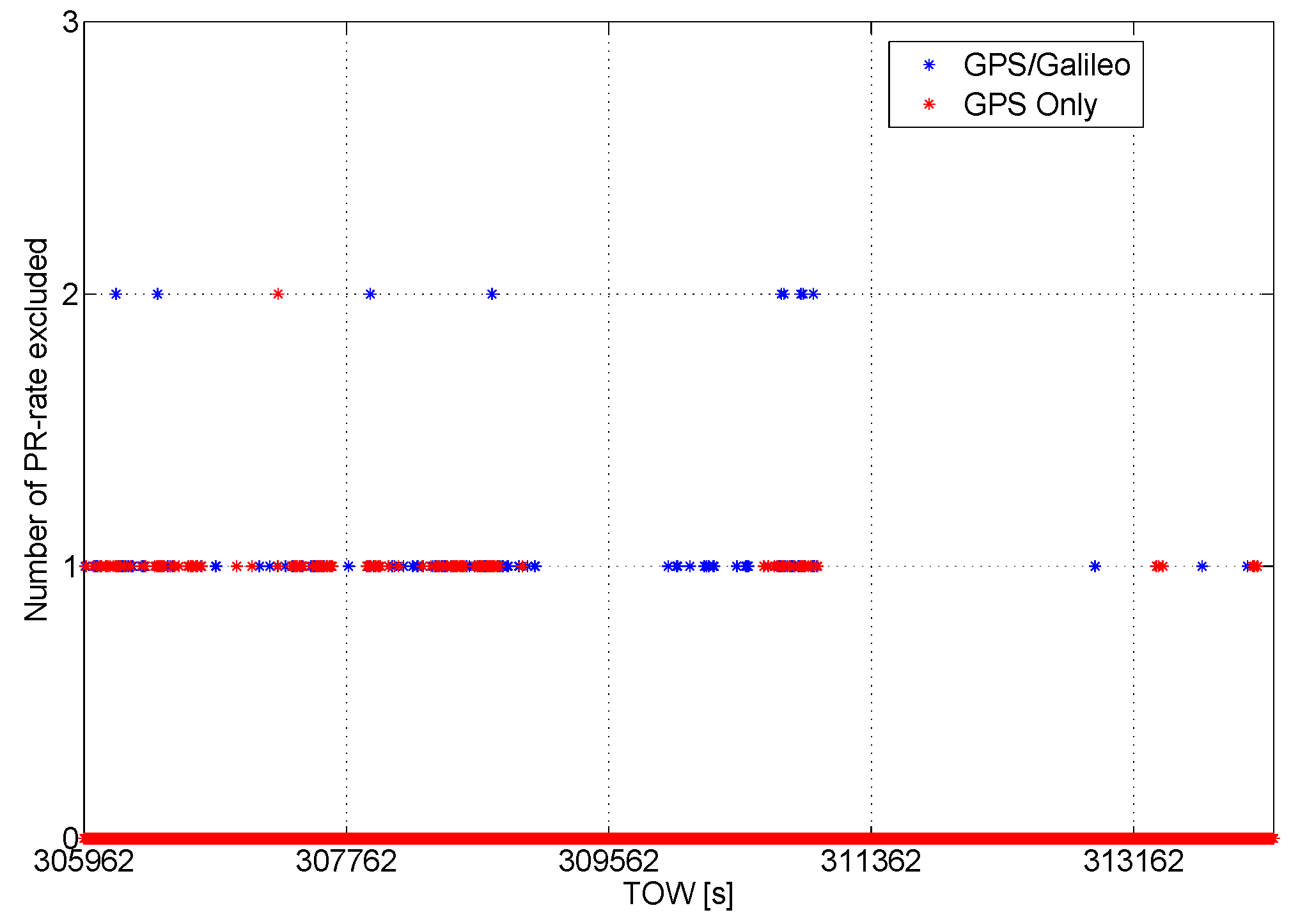
The number of pseudorange-rate measurements excluded from the navigation solution is plotted as a function of time in
Figure 16: the number of exclusions is lower than in the pseudorange case; however, also in this case, the introduction of the Galileo measurements improves the redundancy of the system, enhancing the performance of the RAIM algorithm, which is able to reject a higher number of observables.
Figure 16.
Number of pseudorange-rate observables excluded from the navigation solution as a function of time.
Figure 16.
Number of pseudorange-rate observables excluded from the navigation solution as a function of time.
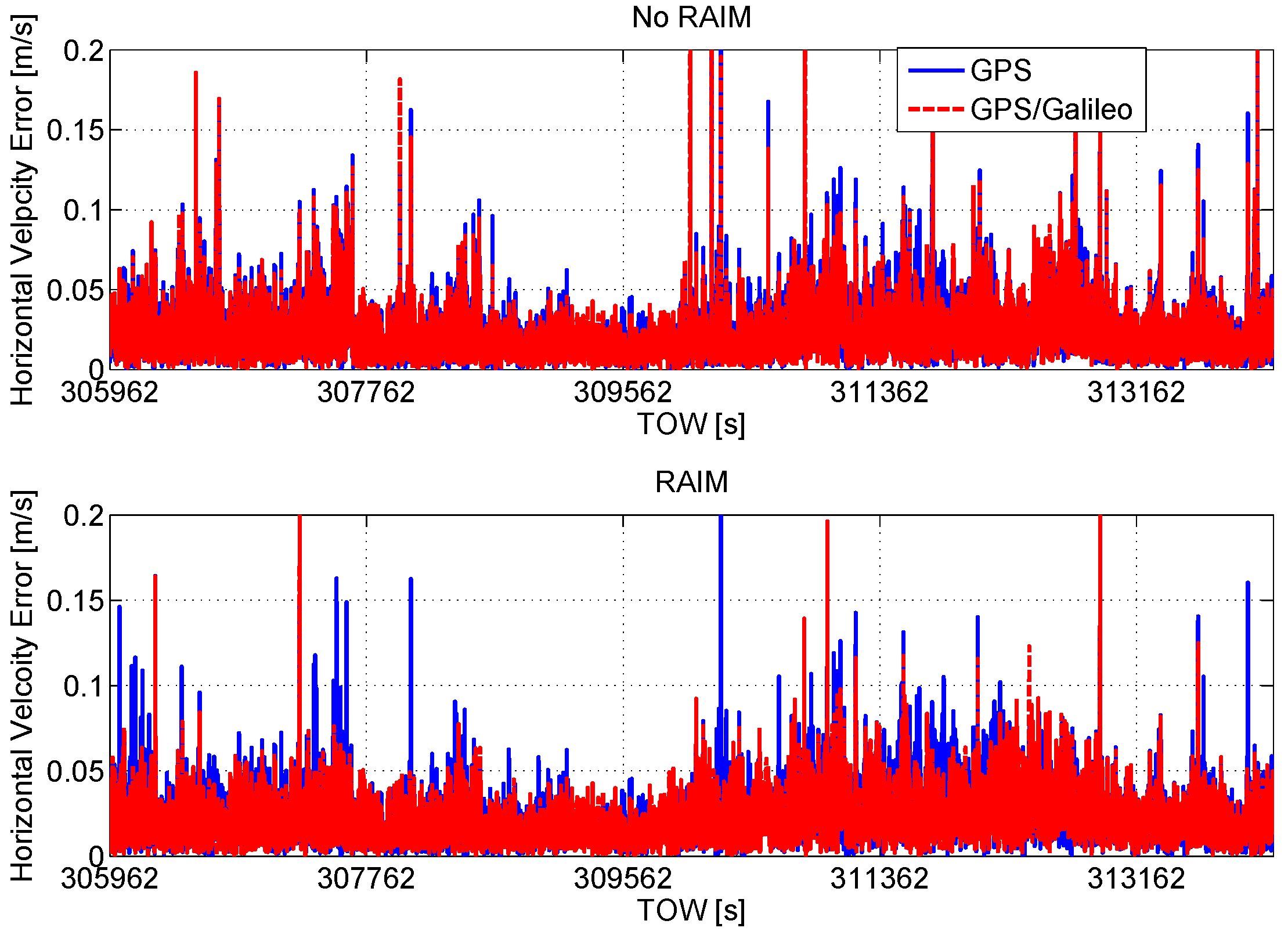
The horizontal velocity errors are plotted as a function of time in
Figure 17. In the upper box of the figure, the configurations without RAIM show similar performance: the introduction of the Galileo measurements provides only a slight error reduction. In the lower box, where the configurations without RAIM are considered, the benefits of the Galileo inclusion are more evident; the use of RAIM improves the performance mainly in terms of maximum errors, which are strongly reduced. The statistical parameters of the velocity errors considering all of the solutions are summarized in
Table 7.
Figure 17.
Horizontal velocity errors as a function of time. Upper box: configurations without RAIM; lower box: configurations with RAIM.
Figure 17.
Horizontal velocity errors as a function of time. Upper box: configurations without RAIM; lower box: configurations with RAIM.
Table 7.
Velocity error statistics considering all epochs.
Table 7.
Velocity error statistics considering all epochs.
| Configuration | Max H (m/s) | Max up (m/s) | SD H (m/s) | SD up (m/s) | Mean H (m/s) | Mean up (m/s) |
|---|
| GPS noRAIM | 1.686 | 2.548 | 0.037 | 0.069 | 0.025 | −0.001 |
| GG noRAIM | 1.680 | 2.566 | 0.043 | 0.065 | 0.023 | −0.001 |
| GPS RAIM | 0.252 | 0.411 | 0.017 | 0.048 | 0.024 | 0.003 |
| GG RAIM | 0.256 | 0.244 | 0.015 | 0.043 | 0.021 | 0.001 |
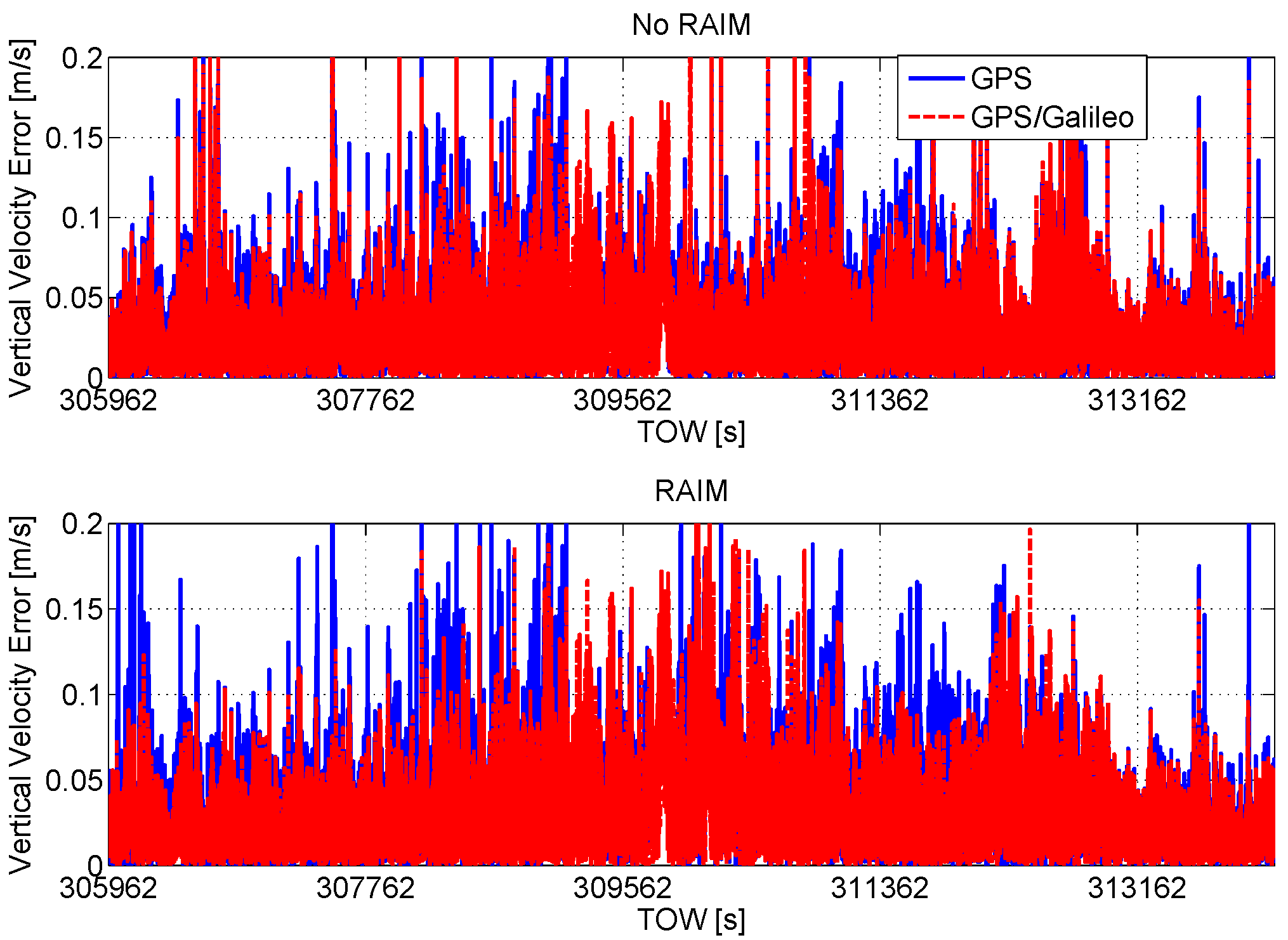
The vertical velocity errors are plotted as a function of time in
Figure 18: the configurations without RAIM application are nearly coincident with a maximum error that exceeds 2 m/s. The RAIM algorithm reduces all of the error parameters, in particular the maximum errors are reduced by about five times. In the vertical case, the benefit of the Galileo inclusion is more evident than in the horizontal case.
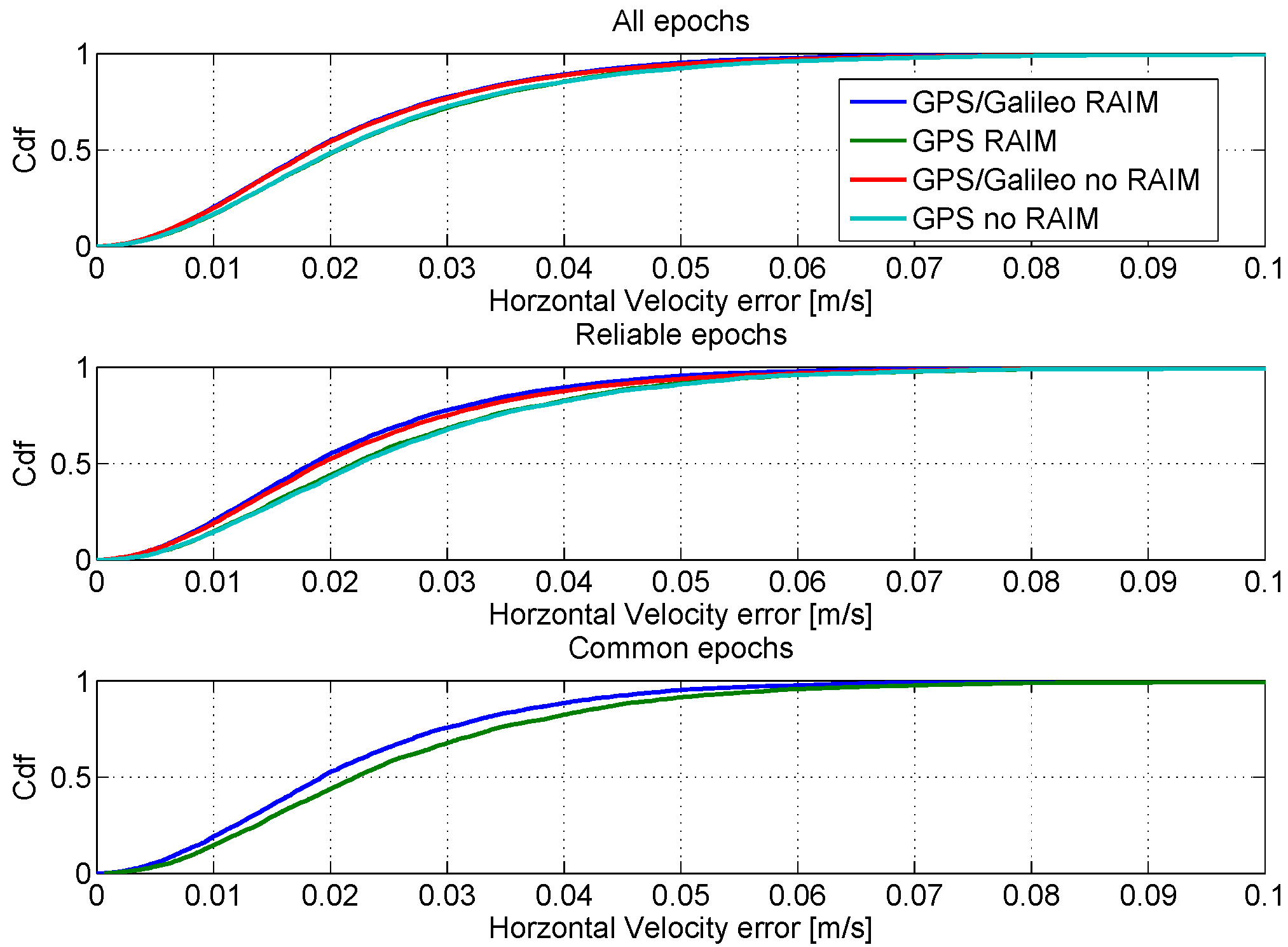
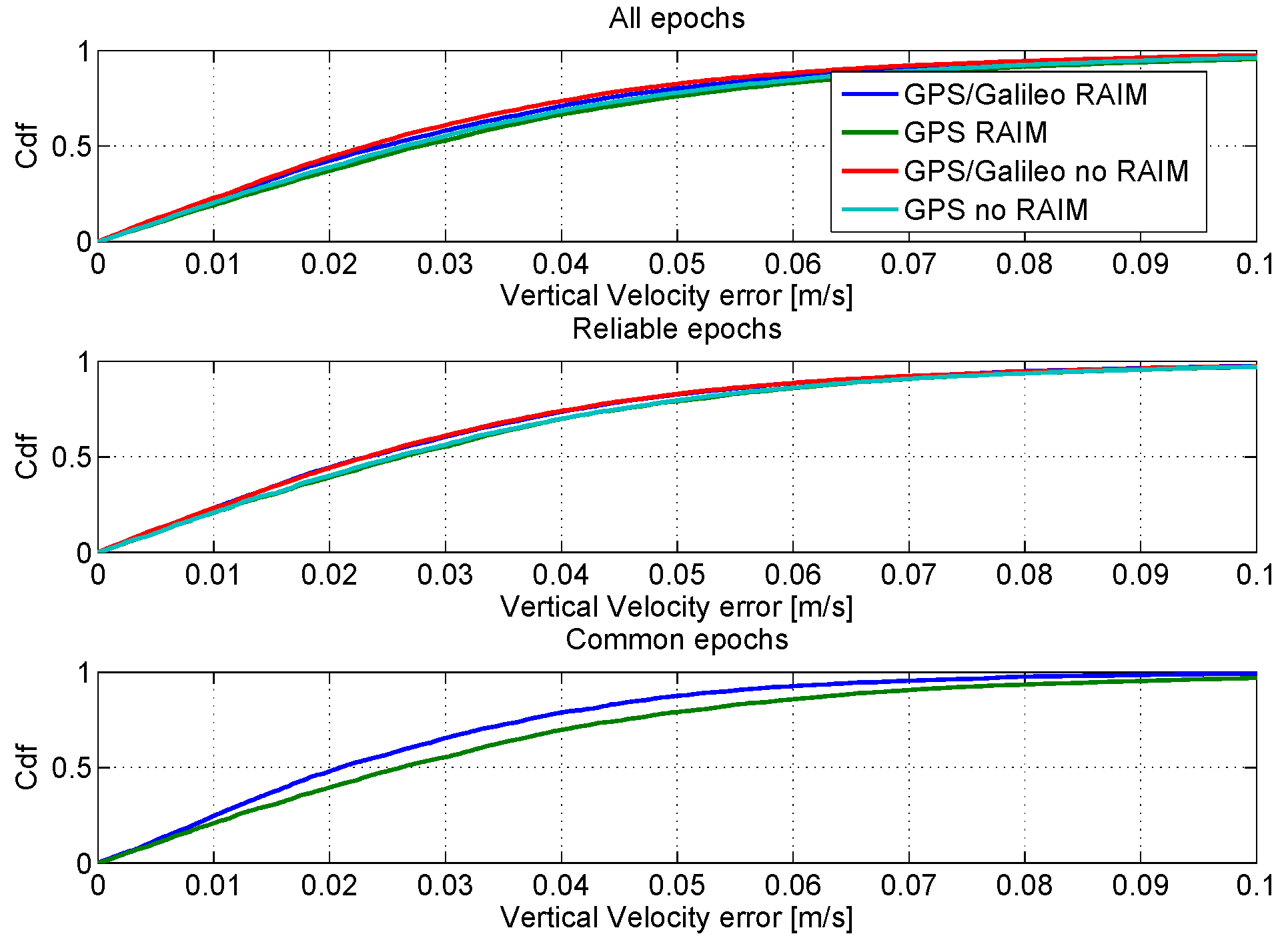
In order to have a fair comparison among the considered configurations, the CDFs of the horizontal and vertical velocity errors are shown in
Figure 19 and
Figure 20, respectively. As for the position domain, three different time frames have been identified and used to compute the CDFs. In particular, the CDFs computed using all of the available epochs are shown in the upper boxes of the figures. In the central boxes, the CDFs using only reliable epochs are shown, and finally, in the lower boxes, the CDFs using only the common reliable epochs are provided. The figures show that all of the configurations have similar performance in the velocity domain: only a slight improvement can be appreciated using the GPS/Galileo multi-constellation solution together with the application of the RAIM algorithm.
Figure 18.
Vertical velocity errors as a function of time. Upper box: configurations without RAIM; lower box: configurations with RAIM.
Figure 18.
Vertical velocity errors as a function of time. Upper box: configurations without RAIM; lower box: configurations with RAIM.
Figure 19.
CDFs of the horizontal velocity errors. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
Figure 19.
CDFs of the horizontal velocity errors. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
Figure 20.
CDFs of the vertical velocity errors. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
Figure 20.
CDFs of the vertical velocity errors. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
Statistical error parameters are computed using only reliable epochs in
Table 8: the main advantage of RAIM application is the reduction of the maximum errors in both the horizontal and vertical channel. The maximum horizontal velocity error passes from
m/s, in the GPS-only case without RAIM, to
m/s applying the RAIM algorithm. The improvements in the multi-constellation case are even more evident: the maximum error is reduced almost six times, passing from
m/s to
m/s.
Table 8.
Velocity error statistics considering only reliable epochs.
Table 8.
Velocity error statistics considering only reliable epochs.
| Configuration | Max H (m/s) | Max up (m/s) | SD H (m/s) | SD up (m/s) | Mean H (m/s) | Mean up (m/s) |
|---|
| GPS noRAIM | 0.453 | 0.464 | 0.017 | 0.039 | 0.022 | 0.010 |
| GG noRAIM | 1.680 | 0.403 | 0.028 | 0.037 | 0.021 | 0.004 |
| GPS RAIM | 0.163 | 0.318 | 0.014 | 0.037 | 0.021 | 0.010 |
| GG RAIM | 0.239 | 0.187 | 0.012 | 0.035 | 0.019 | 0.004 |
Table 9 further investigates the velocity error statistics where only reliable epochs common to both GPS-only and GPS/Galileo configurations are considered. The results support the previous findings. Moreover, it is shown that, in certain cases, the inclusion of Galileo measurements can degrade the velocity solution. RAIM is required to screen out bad measurements possibly introduced by an additional constellation.
Table 9.
Velocity error statistics considering only common reliable epochs.
Table 9.
Velocity error statistics considering only common reliable epochs.
| Configuration | Max H (m/s) | Max up (m/s) | SD H (m/s) | SD up (m/s) | Mean H (m/s) | Mean up (m/s) |
|---|
| GPS noRAIM | 0.453 | 0.464 | 0.016 | 0.038 | 0.021 | 0.010 |
| GG noRAIM | 1.680 | 0.403 | 0.032 | 0.034 | 0.021 | 0.008 |
| GPS RAIM | 0.149 | 0.318 | 0.013 | 0.036 | 0.021 | 0.010 |
| GG RAIM | 0.092 | 0.183 | 0.011 | 0.030 | 0.018 | 0.008 |
5.3. Comparison with Respect to the Classical RAIM Algorithm
In order to analyze the benefits of the additional checks introduced, the proposed algorithm and the classical RAIM algorithm are compared considering GPS and Galileo measurements. Classical RAIM does not have geometry and separability tests and performs only one exclusion.
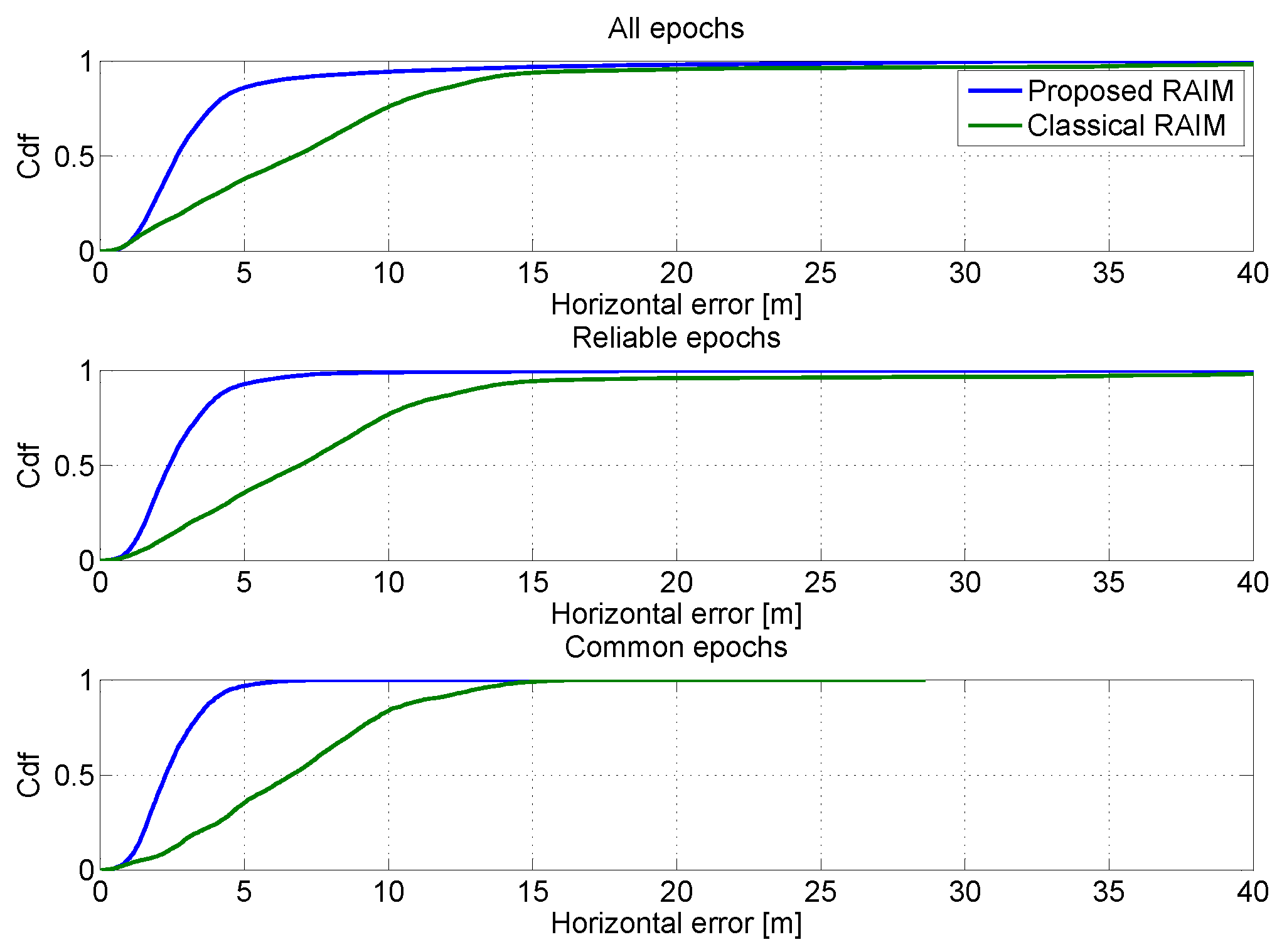
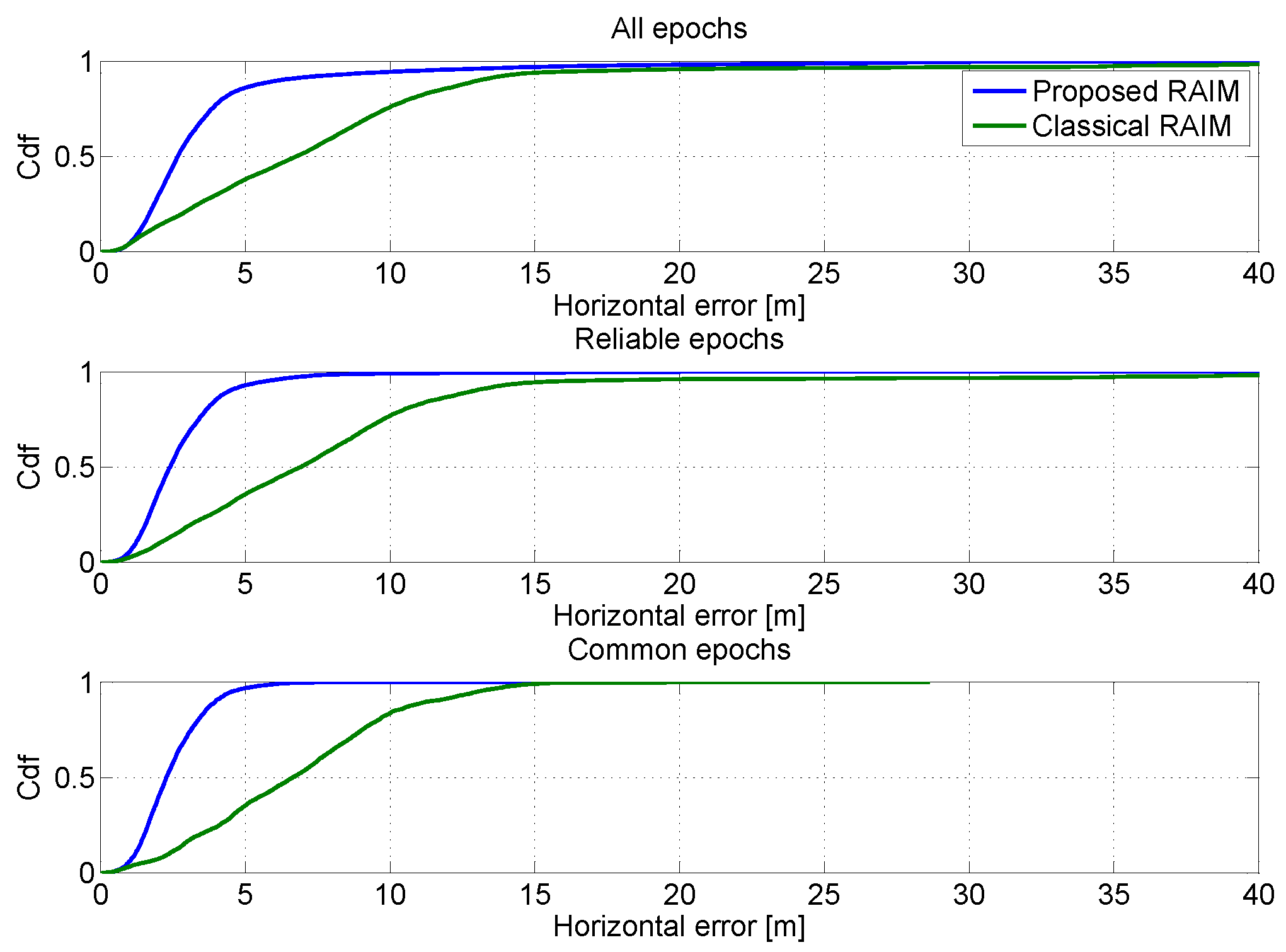
The CDFs of the horizontal errors obtained in the two cases are plotted in
Figure 21. As for the previous cases, the CDFs considering all available epochs is shown in the upper box of the figure; in the central box, the performance of the considered configurations is obtained considering only reliable epochs. Finally, in the lower box, the CDFs are computed using only reliable common reliable epochs. In all cases, the advantages of the tests introduced can be clearly appreciated: the blue lines are higher than the green ones.
In
Figure 22, the CDFs of the vertical position errors considering three different time frames are plotted. The improvements due to the geometry and separability tests are evident: also in this case, the proposed algorithm provides reduced errors with respect to the classical RAIM algorithm. The performance of the configurations analyzed is summarized in
Table 10,
Table 11 and
Table 12.
Table 10.
Position error statistics considering the different solutions and all epochs. Classical RAIM is used as the term of comparison.
Table 10.
Position error statistics considering the different solutions and all epochs. Classical RAIM is used as the term of comparison.
| Configuration | Max H (m) | Max up (m) | SD H (m) | SD up (m) | Mean H (m) | Mean up (m) |
|---|
| Classical RAIM | 74.45 | 164.76 | 7.62 | 20.35 | 7.94 | −5.55 |
| Proposed algorithm | 41.47 | 143.43 | 4.15 | 13.06 | 3.74 | −4.75 |
Table 11.
Position error statistics considering only reliable epochs. Classical RAIM is used as the term of comparison.
Table 11.
Position error statistics considering only reliable epochs. Classical RAIM is used as the term of comparison.
| Configuration | Max H (m) | Max up (m) | SD H (m) | SD up (m) | Mean H (m) | Mean up (m) |
|---|
| Classical RAIM | 32.18 | 24.29 | 3.47 | 5.55 | 6.80 | −2.29 |
| Proposed algorithm | 41.44 | 125.49 | 2.00 | 7.35 | 2.78 | −2.86 |
Table 12.
Position error statistics considering only common reliable epochs. Classical RAIM is used as the term of comparison.
Table 12.
Position error statistics considering only common reliable epochs. Classical RAIM is used as the term of comparison.
| Configuration | Max H (m) | Max up (m) | SD H (m) | SD up (m) | Mean H (m) | Mean up (m) |
|---|
| Classical RAIM | 28.63 | 24.29 | 3.48 | 5.45 | 6.72 | −2.54 |
| Proposed algorithm | 19.02 | 20.74 | 1.18 | 3.70 | 2.47 | −2.30 |
Figure 21.
CDFs of the horizontal position errors when a classical RAIM approach is considered. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
Figure 21.
CDFs of the horizontal position errors when a classical RAIM approach is considered. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
The benefits of the proposed algorithm clearly emerge from the tables. When all epochs are considered, the proposed algorithm provides improved performance with respect to the classical RAIM algorithm. The improvements are evident for all of the considered parameters,
i.e., the maximum and mean error and the error SD. The improvement is present for both horizontal and vertical components. When only reliable epochs are considered, the classical RAIM algorithm provides better performance in terms of maximum horizontal and vertical errors. However, in this case, the performance of the two configurations is evaluated considering different epochs, because the algorithm provides different RA, which in the case of the classical algorithm is
(
was obtained with the approach proposed). The classical RAIM approach is more conservative and does not foresee the possibility of having multiple exclusions. In order to perform a fair comparison between the considered configurations, the performance is evaluated considering only common reliable epochs in
Table 12: the proposed algorithm reduces all of the statistical error parameters considered.
Figure 22.
CDFs of the vertical position errors when a classical RAIM approach is considered. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.
Figure 22.
CDFs of the vertical position errors when a classical RAIM approach is considered. Upper box: CDFs computed using all available epochs; central box: CDFs computed using only reliable epochs; lower box: CDFs computed using only reliable common epochs.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















