
Load Measurement on Foundations of Rockfall Protection Systems

Abstract
:1. Introduction


2. Boundary Conditions for a 6-DOF Measurement System

3. Options for a Post Plate Measuring Device

4. Existing Post Base Measurement Approaches



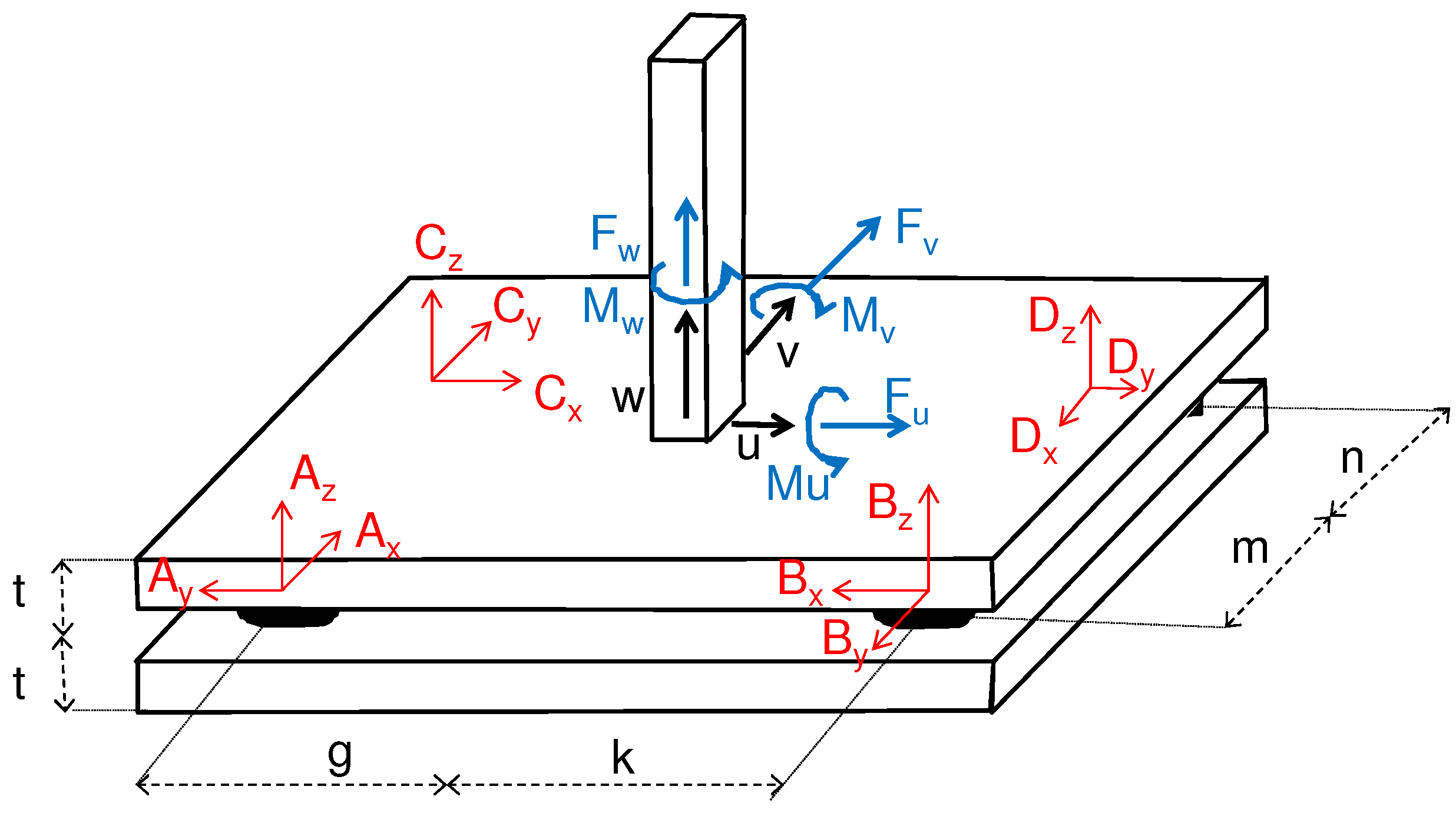
5. Description of the Sensor Unit
5.1. Sensor Hardware



5.2. Measuring Hardware
5.3. Data Processing



6. Measurement Validation

- The reference load cell has a weight of 60 kg, which influences the determination of the applied torques and forces . For a repetition of the validity check we recommend a consideration of the self-weight of not only the load cell but also of the rope, the rope tension system and the sensor unit itself. Alternatively, a different lightweight load cell would be more suitable.
- The reference load cell can measure loads up to 500 kN. The loads applied with this cell during testing were about 14 kN. The calibration document of this load cell revealed measurement errors of kN in this load range. Therefore, a load cell with less deviation for the expected load range and reduced maximum load capacity should be used.
- The results shown do not allow for an extensive error analysis as there are too few measurements. Testing should be performed sampling at different load steps for each load case.
- The thermal influence was neglected. A well-documented load-temperature dependency would help to interpret future measurements.
- The self-weight of the post has been neglected. This is acceptable if only load changes are of interest. However, it should be documented how much the mounting of the post influences the interaction between the steel plate and the four single sensors.
- The influence of possible bending in the steel plate which connects each load cell is not considered in the approach described above. Therefore, instead of a simple validity check of the measurements a full sensitivity analysis should be performed (see Section 7).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Direction | “–u” | “+u” | Up | Down | ||||
|---|---|---|---|---|---|---|---|---|
| and in kNm | –4.2 | –4.6 | –10.3 | –8.9 | –54.3 | –55.8 | 132 | 135.2 |
| and in kNm | –57.8 | –58.2 | 61.1 | 61.8 | 0.1 | 0.4 | 4.9 | –1.9 |
| and in kNm | –7.4 | –6.1 | 7.0 | 6.8 | –1.9 | 0.0 | 4.9 | –0.4 |
| and in kN | –13.2 | –11.0 | 13.9 | 11.4 | –0.1 | –0.7 | 1.4 | 1.3 |
| and in kN | 1.0 | 0.4 | 2.4 | 2.3 | 12.1 | 10.3 | –29 | –25 |
| and in kN | –0.1 | 0.4 | –0.4 | –1.1 | 4.3 | 4.3 | –9.8 | –10.6 |
7. Calibration
| Analytical derivation of K according to Section 5.3 | |||||||||||
| 6487 | 370 | 37,498 | 362 | –5964 | 37,204 | 6 | 6104 | –37,229 | –6572 | 67 | –37,468 |
| –786 | 5362 | –47,944 | 6533 | –128 | 47,969 | –5955 | 112 | –48,037 | 822 | –5942 | 48,004 |
| 12,594 | 9730 | 465 | 10,113 | 12,569 | 207 | 9938 | 12,895 | 268 | 12,715 | 9760 | 299 |
| –30 | 38,611 | 2084 | 39,980 | –18 | –1479 | –39,342 | 119 | 1205 | 57 | –39,258 | –1298 |
| –39,196 | –241 | 174 | 368 | 39,110 | 1795 | –320 | –40,203 | –1770 | 39,594 | –168 | –79 |
| –2432 | –1335 | –150,097 | –1668 | 390 | –149,893 | –167 | 293 | –149,978 | –2530 | 167 | –149,918 |
| Calibrated conversion matrix according to Section 7 | |||||||||||
| –37,127 | –203,622 | –395,156 | 67,306 | –133,674 | –10,946 | –65,216 | 197,478 | 193,184 | 298,491 | 337,697 | 139,860 |
| 4030 | 31,124 | –75,109 | –45,454 | 16,703 | 83,877 | 178,938 | 21,951 | –239,999 | –3744 | –75,575 | –217,935 |
| 16,811 | 78,446 | 111,919 | 58,748 | 13,714 | –30,916 | –3301 | –175,345 | 34,804 | –171,443 | –12,956 | –34,459 |
| 4412 | 64,727 | 7304 | 28,010 | 10,370 | 7083 | 29,986 | –16,368 | –82,856 | –26,101 | –83,493 | –118,425 |
| –28,910 | 76,596 | 133,703 | –13,902 | 83,959 | –18,173 | –4150 | –138,244 | –101,596 | –77,949 | –139,696 | –92,887 |
| –3581 | 27,968 | –113,228 | –1747 | 8313 | –146,761 | 18,284 | –28,923 | –192,311 | –38,164 | –37,642 | –191,804 |
| Comparison between analytical derivation and calibration of () | |||||||||||
| –6 | –550 | –11 | 186 | 22 | 0 | –10,505 | 32 | –5 | –45 | 5051 | –4 |
| –5 | 6 | 2 | –7 | –130 | 2 | –30 | 196 | 5 | –5 | 13 | –5 |
| 1 | 8 | 241 | 6 | 1 | –149 | 0 | –14 | 130 | –13 | –1 | –115 |
| –146 | 2 | 4 | 1 | –567 | –5 | –1 | –137 | –69 | –458 | 2 | 91 |
| 1 | –318 | 767 | –38 | 2 | –10 | 13 | 3 | 57 | –2 | 832 | 1182 |
| 1 | –21 | 1 | 1 | 21 | 1 | –109 | –99 | 1 | 15 | –226 | 1 |
| Differences between applied actions on foundation and calculated using an analytically derived conversion matrix K | ||||||||||||||
| 2.3 | 0.7 | 2.0 | –0.1 | 3.5 | 3.4 | 6.5 | 0.2 | –3.4 | –1.1 | 3.8 | 4.9 | 3.5 | 4.1 | kNm |
| –0.1 | –0.2 | 0.7 | –0.2 | –0.8 | –1.0 | –0.1 | –1.4 | 0.1 | 0.9 | 1.7 | 1.0 | –2.8 | –0.5 | kNm |
| 0.0 | 0.0 | 1.0 | –0.1 | –3.6 | –5.5 | –0.6 | –4.6 | 0.0 | 1.4 | 2.6 | 0.9 | –0.4 | –1.0 | kNm |
| –0.2 | –0.4 | –0.4 | –0.5 | –0.1 | 0.0 | –0.1 | –0.1 | –0.2 | 0.0 | –0.1 | 0.1 | –0.9 | 0.3 | kN |
| –1.3 | –1.6 | –1.3 | –1.7 | –1.7 | –1.7 | –1.3 | –1.1 | –0.8 | –0.8 | –0.9 | –1.1 | –0.7 | –1.0 | kN |
| –0.2 | 0.1 | –0.2 | 0.2 | 0.0 | 0.0 | –0.3 | 0.1 | –0.2 | –0.4 | –0.5 | –0.4 | –0.4 | –0.3 | kN |
| Differences between applied actions on foundation and calculated using a calibrated conversion matrix | ||||||||||||||
| 0.9 | –0.3 | 1.0 | –0.7 | 0.2 | –0.6 | 0.8 | –0.4 | 1.0 | –0.8 | –0.8 | 1.1 | –0.1 | –0.4 | kNm |
| 0.6 | –0.2 | 0.0 | 0.0 | –0.3 | 0.4 | 0.0 | 0.0 | –0.1 | 0.0 | –0.3 | 0.4 | –1.1 | 0.8 | kNm |
| 0.1 | 0.1 | –0.1 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | kNm |
| 0.3 | –0.1 | 0.0 | 0.0 | –0.1 | 0.2 | 0.0 | 0.0 | 0.0 | 0.0 | –0.1 | 0.2 | –0.5 | 0.3 | kN |
| –0.3 | 0.0 | –0.2 | 0.2 | 0.0 | 0.1 | –0.2 | 0.1 | –0.2 | 0.2 | 0.2 | –0.3 | 0.1 | 0.1 | kN |
| 0.0 | 0.0 | –0.1 | 0.1 | 0.0 | 0.1 | –0.1 | 0.0 | –0.1 | 0.1 | 0.1 | –0.1 | 0.0 | 0.1 | kN |
| 9.9 × 10 | –1.2 × 10 | –5.3 × 10 | –1.2 × 10 | –1.2 × 10 | 2.5 × 10 | 1.2 × 10 | 1.1 × 10 | –1.8 × 10 | –1.1 × 10 | 9.4 × 10 | 4.0 × 10 |
| –5.8 × 10 | 1.0 × 10 | 4.2 × 10 | 1.1 × 10 | 8.7 × 10 | –3.0 × 10 | –1.0 × 10 | –6.8 × 10 | 2.3 × 10 | 7.1 × 10 | –7.9 × 10 | –2.7 × 10 |
| –7.1 × 10 | 1.2 × 10 | 5.2 × 10 | 1.3 × 10 | 1.1 × 10 | –3.7 × 10 | –1.3 × 10 | –8.3 × 10 | 2.8 × 10 | 8.6 × 10 | –9.6 × 10 | –3.4 × 10 |
| –1.3 × 10 | 2.3 × 10 | 9.7 × 10 | 2.4 × 10 | 2.0 × 10 | –6.9 × 10 | –2.4 × 10 | –1.6 × 10 | 5.3 × 10 | 1.6 × 10 | –1.8 × 10 | –6.3 × 10 |
| –2.1 × 10 | 2.5 × 10 | 1.1 × 10 | 2.5 × 10 | 2.6 × 10 | –5.3 × 10 | –2.5 × 10 | –2.3 × 10 | 4.0 × 10 | 2.3 × 10 | –2.0 × 10 | –8.2 × 10 |
| –2.2 × 10 | 2.6 × 10 | 1.1 × 10 | 2.6 × 10 | 2.9 × 10 | –6.7 × 10 | –2.6 × 10 | –2.4 × 10 | 2.2 × 10 | 2.5 × 10 | –2.0 × 10 | –1.0 × 10 |
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gerber, W. Guideline for the Approval of Rockfall Protection Kits; Swiss Federal Office for the Environment FOEN, VU-7509-E: Berne, Switzerland, 2001. [Google Scholar]
- EOTA. ETAG 027-Guideline for the European Technical Approval of Falling Rock Protection Kits, Tech. Rep.; European Organization for Technical Approvals: Brussels, Belgium, 2008. [Google Scholar]
- Turner, R.; Duffy, J.D.; Turner, J.P. Post Foundations for Flexible Rockfall Fences. In Proceedings of the 60th Highway Geology Symposium, Buffalo, NY, USA, 29 Sepember–2 October 2009.
- Volkwein, A. Numerical Simulation of Flexible Rockfall Protection Systems. Proc. Comput. Civil Eng. 2005. [Google Scholar] [CrossRef]
- Thoeni, K.; Giacomini, A.; Lambert, C.; Sloan, S.W.; Carter, J.P. A 3D discrete element modelling approach for rockfall analysis with drapery systems. Int. J. Rock Mech. Min. Sci. 2014, 68, 107–119. [Google Scholar]
- Gentilini, C.; Gottardi, G.; Govoni, L.; Mentani, A.; Ubertini, F. Design of falling rock protection barriers using numerical models. Eng. Struct. 2013, 50, 96–106. [Google Scholar] [CrossRef]
- Escallón, J.P.; Wendeler, C.; Chatzi, E.; Bartelt, P. Parameter identification of rockfall protection barrier components through an inverse formulation. Eng. Struct. 2014, 77, 1–16. [Google Scholar]
- Volkwein, A.; Gerber, W. Stronger and lighter-evolution of flexible rockfall protection systems. In IABSE-IASS 2011 London Symposium Report: Taller, Longer, Lighter; IABSE: Zurich, Switzerland, 2011. [Google Scholar]
- Stelzer, G. Post System Testing. In Proceedings of the 94th Annual TRB Meeting, Tranportation Research Board, Washington, DC, USA, 11–15 January 2015.
- GTM GmbH. Available online: http://www.gtm-gmbh.com/en/products/multicomponent-transducers.html (accessed on 17 April 2015).
- HBM. U5 - Robust Load Cell for Tensile and Compressive Forces. Available online: http://www.hbm.com/en/menu/products/transducers-sensors/force/u5 (accessed on 17 April 2015).
- Beyeler, F.; Muntwyler, S.; Nagy, Z.; Graetzel, C.; Moser, M.; Nelson, B.J. Design and calibration of a MEMS sensor for measuring force and torque acting on a magnetic microrobot. J. Micromech. Microeng. 2008, 18, 025004. [Google Scholar] [CrossRef]
- Beyeler, F.; Muntwyler, S.; Nelson, B.J. A Six-Axis MEMS force-torque sensor with micro-Newton and nano-Newtonmeter resolution. J. Microelectromech. Syst. 2009, 18, 433–441. [Google Scholar] [CrossRef]
- GTM GmbH, Example Calibration Document. Available online: http://www.gtm-gmbh.com/fileadmin/media/dokumente/kalibrieren/kalibrierscheine/KS_GTM-RL-002.pdf (accessed on 17 April 2015).
- EoTA. Valid ETAs. Available online: http://valideta.eota.eu/pages/valideta (accessed on 12 March 2015).
- Arndt, B.; Ortiz, T.; Group, R. Testing of Rockfall Post Foundations in Colorado. In Proceedings of the 64th Highway Geology Symposium, North Conway, NH, USA, 9–12 September 2013.
- Aminta, A. Measuring Device for Stress Detection on a Protection Barrier and Protection Barrier Having such Measuring Device. Available online: https://data.epo.org/publication-server/rest/v1.0/publication-dates/20090211/patents/EP2023111NWA2/document.pdf (accessed on 28 January 2016).
- Paola, P.; Ferraiolo, F. Documentation about the Patented System Used in CTR Field Test to Evaluate the Loads at the Base of the Post; Consorzio Triveneto Rocciatori (CTR): Padova, Italy, 2009. [Google Scholar]
- GTM GmbH. Data Sheet Load Cell Series RF. Available online: http://www.gtm-gmbh.com/fileadmin/media/dokumente/produkte/datenblaetter/de/Datenblatt_Serie_RF.pdf (accessed on 19 April 2015).
- GOM. ATOS III. Available online: http://www.gom.com/messsysteme/systemuebersicht/atos-triple-scan.html (accessed on 22 June 2015).
- GOM. Gom Inspect V7.5 SR1. Available online: http://www.gom.com/3d-software/gom-inspect.html (accessed on 22 June 2015).
- National Instruments. NI 9237 - 4-Channel, 24-Bit Half/Full-Bridge Analog Input Module. Available online: http://www.ni.com/pdf/manuals/374186e.pdf (accessed on 22 June 2015).
- National Instruments. NI cDAQ-9174 - NI CompactDAQ Four-Slot USB Chassis. Available online: http://www.ni.com/pdf/manuals/374045a.pdf (accessed on 22 June 2015).
- National Instruments. LabVIEW. Available online: http://www.ni.com/labview (accessed on 22 June 2015).
- Leica. Nova MS 50. Available online: http://www.leica-geosystems.ch/downloads123/zz/tps/nova_ms50/brochures-datasheet/Leica_Nova_MS50_DAT_de.pdf (accessed on 14 January 2016).
- DIN EN ISO 376:2011-09: Metallic Materials-Calibration of Force-Proving Instruments Used for the Verification of Uniaxial Testing Machines. Beuth: Berlin, Germany, 2011.
- Deutscher Kalibrierdienst. Kalibrierung von Kraftmessgeräten. Richtlinie DKD-R 3-3, 03/2007. Available online: http://www.dkd.eu/dokumente/Richtlinien/dkd_r_3_3.pdf (accessed on 28 January 2016).
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Volkwein, A.; Kummer, P.; Bitnel, H.; Campana, L. Load Measurement on Foundations of Rockfall Protection Systems. Sensors 2016, 16, 174. https://doi.org/10.3390/s16020174
Volkwein A, Kummer P, Bitnel H, Campana L. Load Measurement on Foundations of Rockfall Protection Systems. Sensors. 2016; 16(2):174. https://doi.org/10.3390/s16020174
Chicago/Turabian StyleVolkwein, Axel, Peter Kummer, Hueseyin Bitnel, and Lorenzo Campana. 2016. "Load Measurement on Foundations of Rockfall Protection Systems" Sensors 16, no. 2: 174. https://doi.org/10.3390/s16020174
APA StyleVolkwein, A., Kummer, P., Bitnel, H., & Campana, L. (2016). Load Measurement on Foundations of Rockfall Protection Systems. Sensors, 16(2), 174. https://doi.org/10.3390/s16020174