
A New Node Deployment and Location Dispatch Algorithm for Underwater Sensor Networks

Abstract
:1. Introduction
- (1)
- To resolve the node deployment problem, we propose a novel deployment algorithm that can achieve a comparatively large coverage percentage and a fully connected network with relatively sparse node distribution.
- (2)
- To resolve the node location dispatch problem, we propose a novel node location dispatch algorithm based on the command nodes, which can help the common nodes preserve more total energy when they reach their destination locations.
2. Principle of the Algorithm
2.1. The Overall Layout
2.1.1. Assumptions and Directions
2.1.2. Algorithm Layout
2.2. Models and Definitions
2.2.1. Models
(1) 3D Underwater Space Model

(2) Node Probabilistic Sensing Model
(3) Dispatch Model Based on Dispatch Nodes

2.2.2. Definitions
(1) Neighboring Cube Point Set
(2) Network Coverage Rate
(3) Network Connectivity Rate
2.3. Description of the Problem and the Algorithm
2.3.1. GFCND
(1) Problem Description
(2) Algorithm Description

2.3.2. LDBCN
(1) Problem Description

2.3.3. Algorithm Description
| Algorithm 1. Adjustment process of sink node. |
|
| Algorithm 2. Dispatch process of dispatch nodes. |
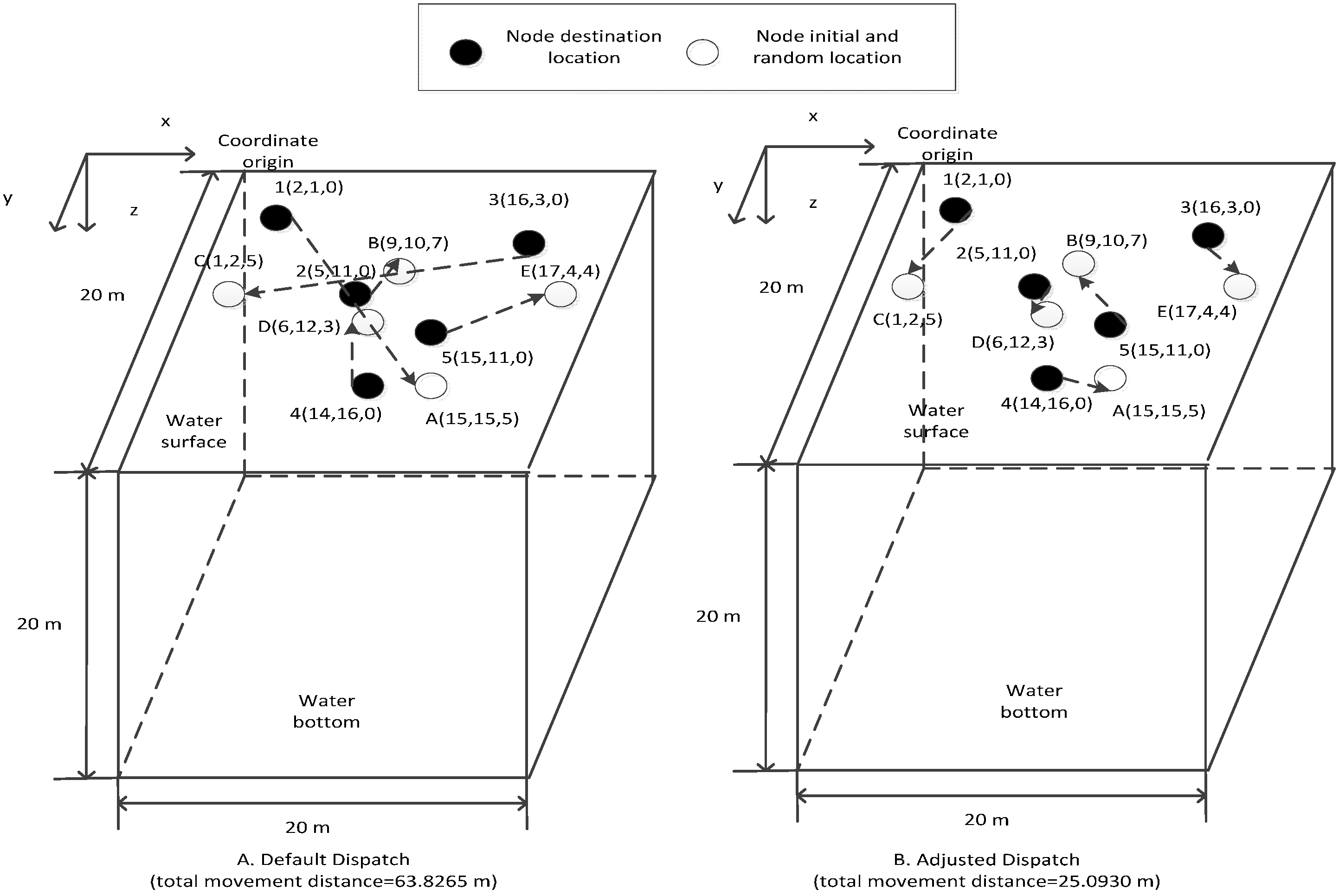
| After Step 3, the number of the common nodes is equal to the number of the destination locations in the administrating area of each command node. Therefore, each command node can dispatch the common nodes to the destination locations in its administrating area in a centralized manner. Taking any of the command nodes as an example, we suppose that the destination location set in its administrating area can be denoted as L = {l1,l2,…,lk}, and the set of common nodes is denoted as S = {s1,s2,…,sk}, and eli is the remaining energy of the ith common node. Then, the dispatch problem shifts to choosing the proper destination locations for these k common nodes on the condition , where em is the energy cost per movement distance, and d(si,lj) is the distance between the common node si and the destination location lj. If we construct a bipartite graph G = (S ∪ L, S × L) based on the set S and L, and assume that the edge whose endpoints are si ∈ S and lj ∈ L is denoted as E(si,lj) and weight is defined to be w(si,lj) = eli–em × d(si,lj), the dispatch problem can be converted to an optimal match problem. The KM algorithm described in [19] is utilized to solve the abovementioned problem. After the calculating result is broadcast to the common nodes, the common nodes move to the destination location from their initial random location along the straight line. |
3. Simulation Evaluation
3.1. GFCND
3.1.1. Simulation Scenario
3.1.2. Simulation Results and Analyses



3.2. LDBCN
3.2.1. Simulation Scenario

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial energy Initial energy of Initial energy of Node movement of sink node (J) command node (J) common node (J) speed (m/s) |
| CD 70000 / 50000 0.1 |
| DD / / 50000 0.1 |
| LDBCN 70000 40000 50000 0.1 |
| Energy consumption Energy consumption Communication per movement distance (J/m) per communication (J) interval (s) |
| CD 50 20 / |
| DD 50 20 20 |
| LDBCN 50 20 / |
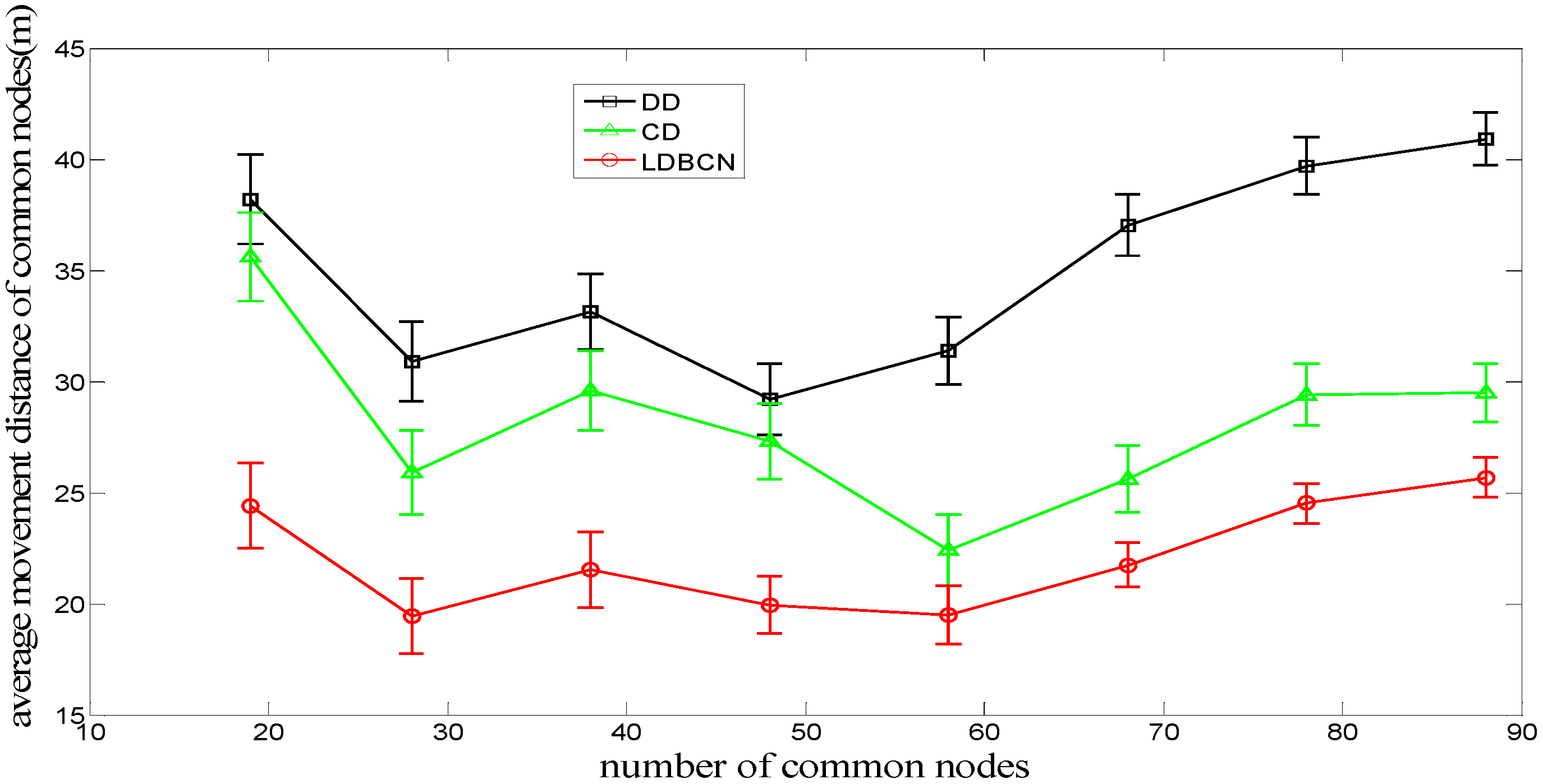
3.2.2. Simulation Results and Analyses
| Number of Common Nodes | CD | Confidence Intervals of CD | DD | Confidence Intervals of DD | LDBCN | Confidence Intervals of LDBCN |
|---|---|---|---|---|---|---|
| 19 | 57 | (42, 72) | 4375 | (4075, 4675) | 91 | (68, 114) |
| 28 | 84 | (69, 99) | 7426 | (7133, 7719) | 122 | (100, 144) |
| 38 | 114 | (100, 128) | 13703 | (13418, 13988) | 169 | (148, 190) |
| 48 | 144 | (130, 158) | 21028 | (20747, 21309) | 213 | (192, 234) |
| 58 | 174 | (161, 177) | 24761 | (24485, 25037) | 246 | (227, 265) |
| 68 | 204 | (192, 216) | 36912 | (36642, 37182) | 286 | (268, 304) |
| 78 | 234 | (222, 246) | 45476 | (45214, 45738) | 334 | (317, 351) |
| 88 | 264 | (252, 276) | 49817 | (49567, 50067) | 372 | (356, 388) |


4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zuba, M. Connecting with oceans using underwater acoustic networks. XRDS Crossroads ACM Mag. Stud. 2014, 20, 32–37. [Google Scholar] [CrossRef]
- Du, X.Y.; Sun, L.J.; Liu, L.F. Coverage optimization algorithm based on sampling for 3D underwater sensor networks. Int. J. Distrib. Sens. Netw. 2013, 2013, 478470. [Google Scholar]
- Huang, C.J.; Wang, Y.W.; Liao, H.H.; Lin, C.-F.; Hu, K.-W.; Chang, T.-Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Luo, H.; Guo, Z.; Wu, K.; Hong, F.; Feng, Y. Energy balanced strategies for maximizing the lifetime of sparsely deployed underwater acoustic sensor networks. Sensors 2009, 9, 6626–6651. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; He, D. Ant colony optimization with greedy migration mechanism for node deployment in wireless sensor networks. J. Netw. Comput. Appl. 2014, 39, 310–318. [Google Scholar] [CrossRef]
- Yadav, J.; Mann, S. Coverage in wireless sensor networks: A survey. Int. J. Electron. Comput. Sci. Eng. 2013, 2, 465–471. [Google Scholar]
- Dina, S.D.; Yasser, G. Classification of wireless sensor networks deployment techniques. IEEE Commun. Surv. Tutor. 2014, 16, 834–855. [Google Scholar]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Alam, S.N.; Haas, Z. Coverage and connectivity in three-dimensional networks. In Proceedings of the 12th Annual ACM International Conference on Mobile Computing and Networking, Los Angeles, CA, USA, 24–29 September 2006; pp. 346–357.
- Dhillon, S.S.; Chakrabarty, K. Sensor placement for effective coverage and surveillance in distributed sensor networks. In Proceedings of the Wireless Communications and Networking, New Orleans, LA, USA, 20 March 2003; pp. 1609–1614.
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Three-dimensional and two-dimensional deployment analysis for underwater acoustic sensor networks. Ad Hoc Netw. 2009, 7, 778–790. [Google Scholar] [CrossRef]
- Halder, S.; Ghosal, A.; Bit, S.D. A pre-determined node deployment strategy to prolong network lifetime in wireless sensor network. Comput. Commun. 2011, 34, 1294–1306. [Google Scholar] [CrossRef]
- Wang, Y.C.; Peng, W.C.; Chang, M.H.; Tseng, Y.C. Exploring load-balance to dispatch mobile sensors in wireless sensor networks. In Proceedings of the 16th International Conference on Computer Communications and Networks, Honolulu, HI, USA, 13–16 August 2007; pp. 669–674.
- Wang, Y.C. A two-phase dispatch heuristic to schedule the movement of multi-attribute mobile sensors in a hybrid wireless sensor network. IEEE Trans. Mob. Comput. 2014, 13, 709–722. [Google Scholar] [CrossRef]
- Wang, Y.C.; Chun, C.H.; Tseng, Y.C. Efficient placement and dispatch of sensors in a wireless sensor network. IEEE Trans. Mob. Comput. 2008, 7, 262–274. [Google Scholar] [CrossRef]
- Du, H.Z.; Xia, N.; Zheng, R. Particle swarm inspired underwater sensor self-deployment. Sensors 2014, 14, 15262–15281. [Google Scholar] [CrossRef] [PubMed]
- Wan, H.L.; Chung, W.H. The generalized k-coverage under probabilistic sensing model in sensor networks. In Proceedings of the Wireless Communications and Networking, Shanghai, China, 1–4 April 2012; pp. 1737–1742.
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.B.; Zhou, M.C.; Alkins, R. Group role assignment via a Kuhn–Munkres algorithm-based solution. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 739–750. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, P.; Liu, J.; Ruan, B.; Jiang, L.; Wu, F. A New Node Deployment and Location Dispatch Algorithm for Underwater Sensor Networks. Sensors 2016, 16, 82. https://doi.org/10.3390/s16010082
Jiang P, Liu J, Ruan B, Jiang L, Wu F. A New Node Deployment and Location Dispatch Algorithm for Underwater Sensor Networks. Sensors. 2016; 16(1):82. https://doi.org/10.3390/s16010082
Chicago/Turabian StyleJiang, Peng, Jun Liu, Binfeng Ruan, Lurong Jiang, and Feng Wu. 2016. "A New Node Deployment and Location Dispatch Algorithm for Underwater Sensor Networks" Sensors 16, no. 1: 82. https://doi.org/10.3390/s16010082
APA StyleJiang, P., Liu, J., Ruan, B., Jiang, L., & Wu, F. (2016). A New Node Deployment and Location Dispatch Algorithm for Underwater Sensor Networks. Sensors, 16(1), 82. https://doi.org/10.3390/s16010082