
A Novel Zero Velocity Interval Detection Algorithm for Self-Contained Pedestrian Navigation System with Inertial Sensors

Abstract
:1. Introduction
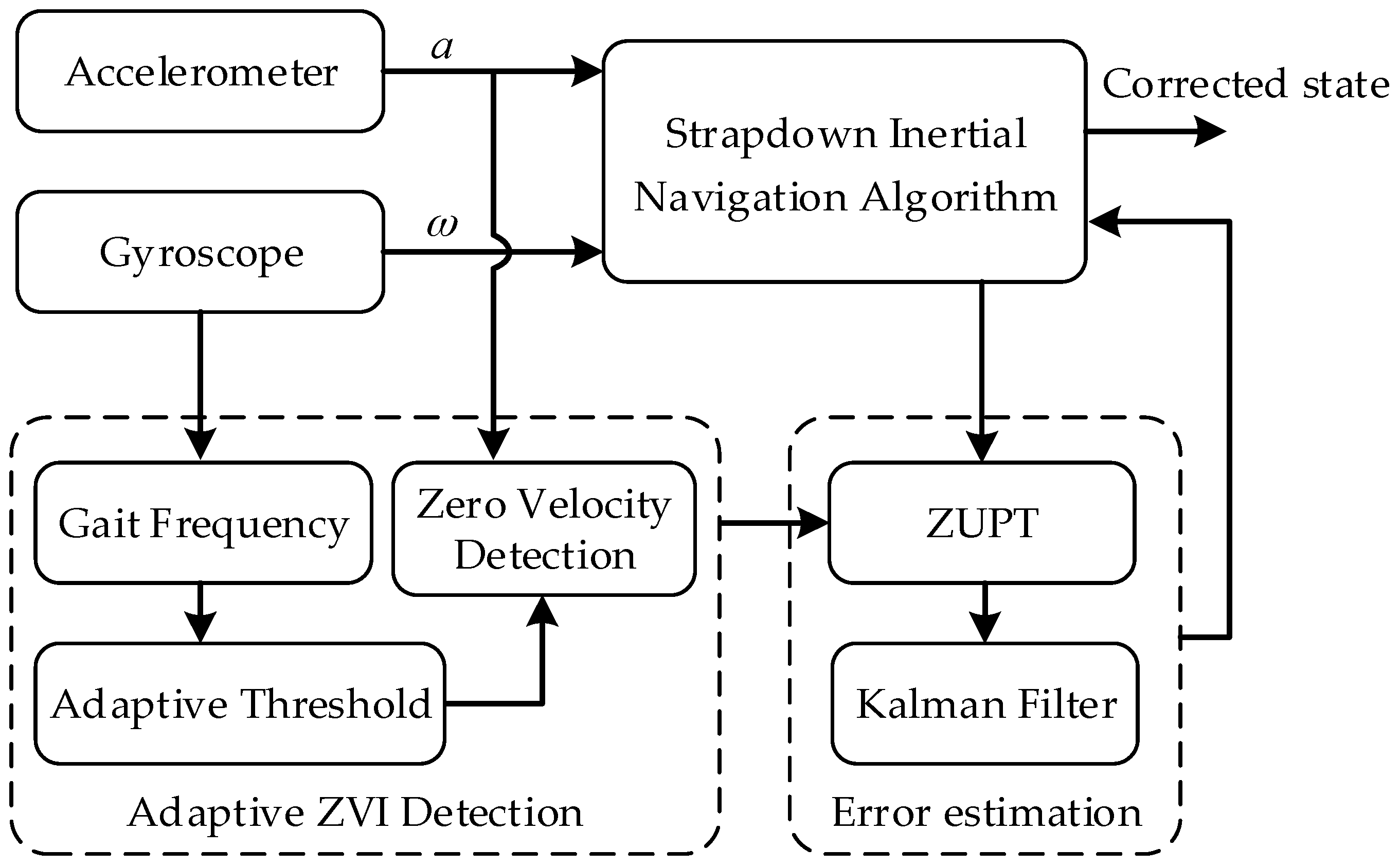
2. Pedestrian Navigation Algorithm Architecture
2.1. Strapdown Inertial Navigation Algorithm Module
2.2. Adaptive ZVI Detection Module
2.3. Error Estimation Module
3. Adaptive ZVI Detection Algorithm Based on SPWVD-RMFI
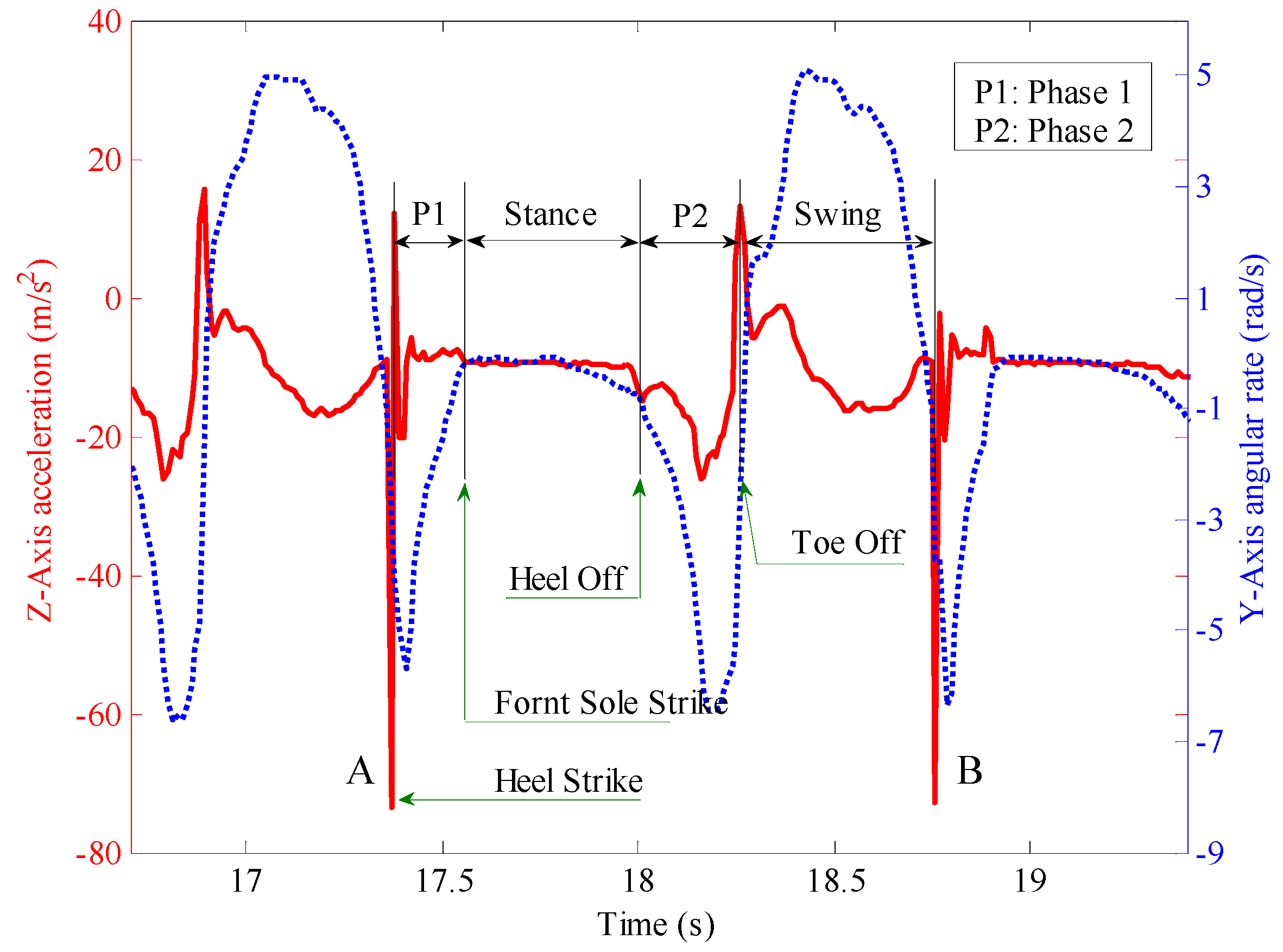
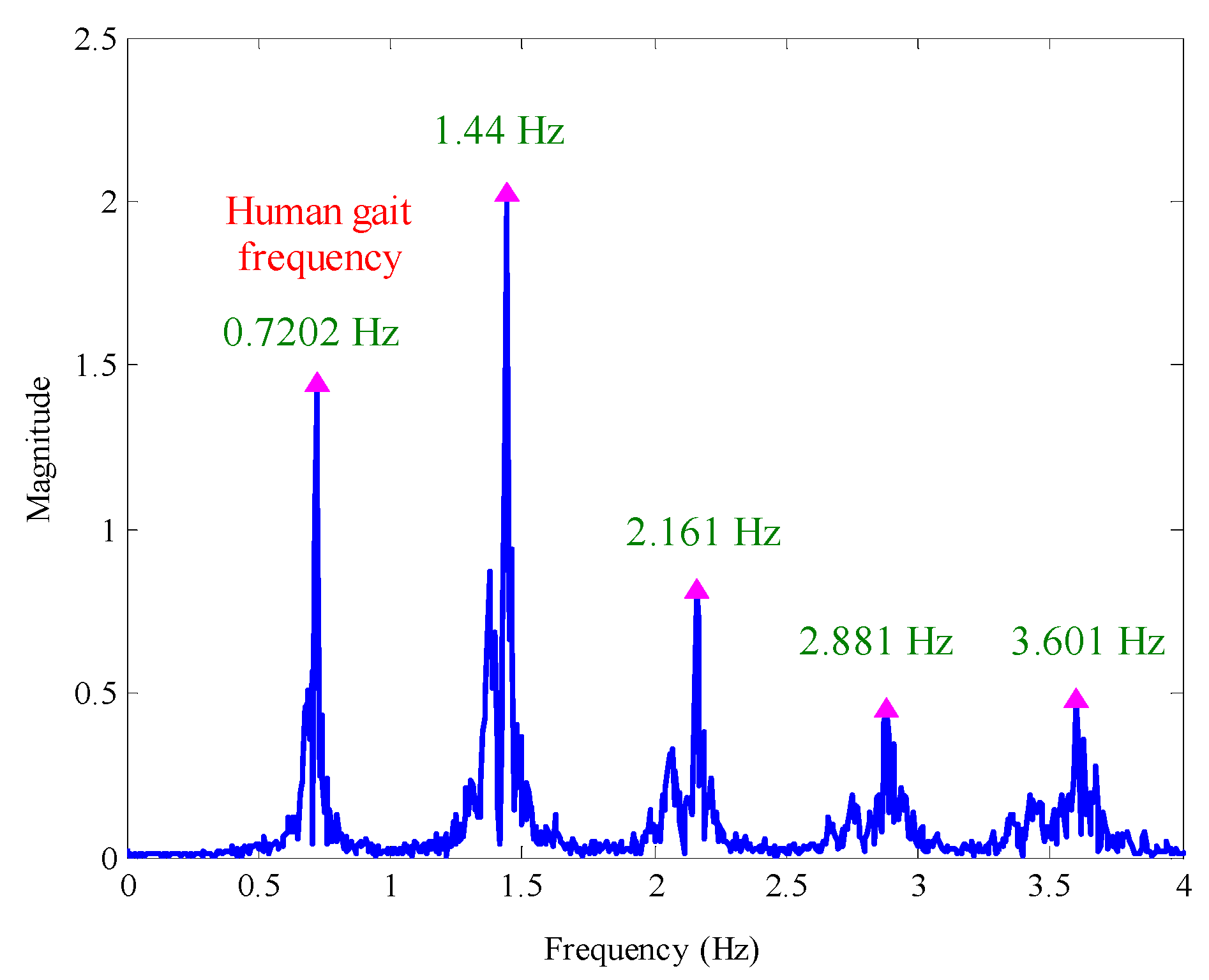
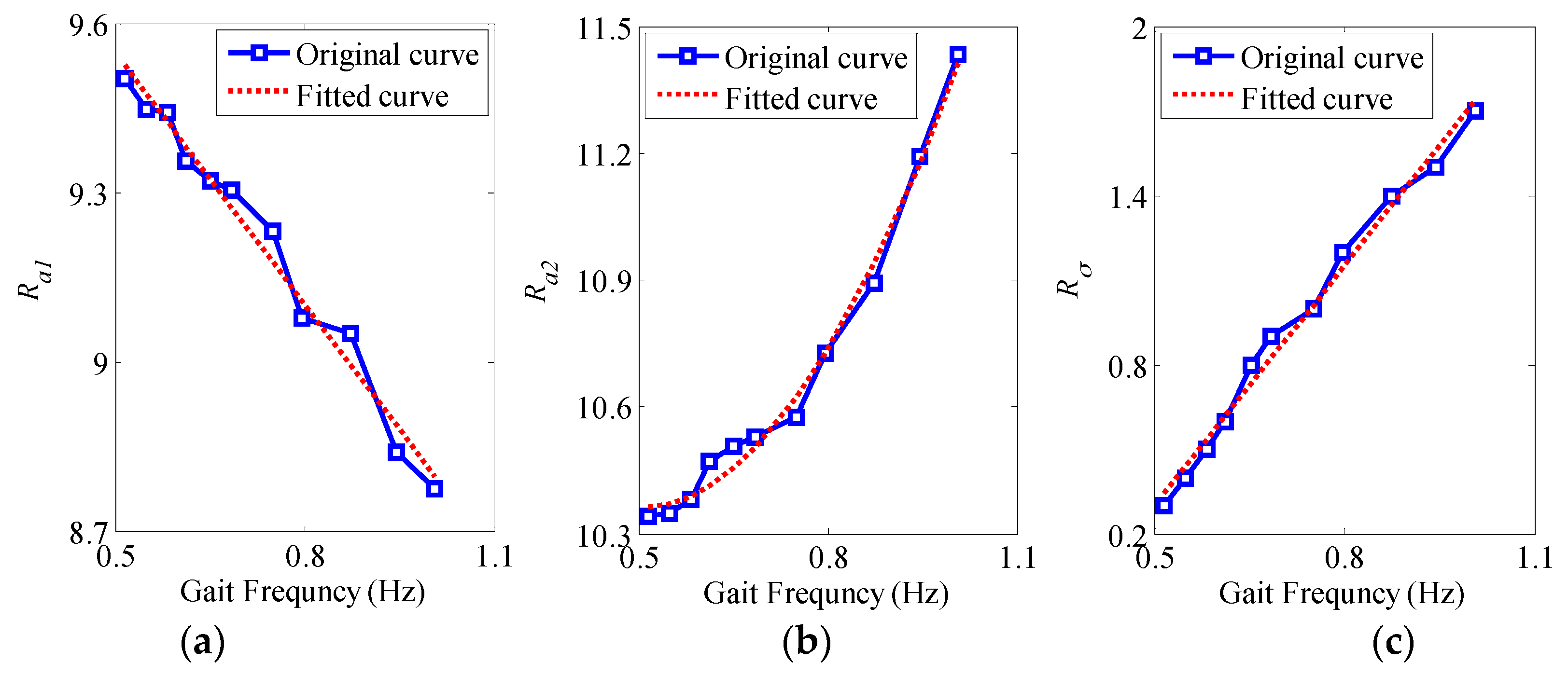
3.1. Gait Characteristics Analysis
3.2. Adaptive ZVI Detection
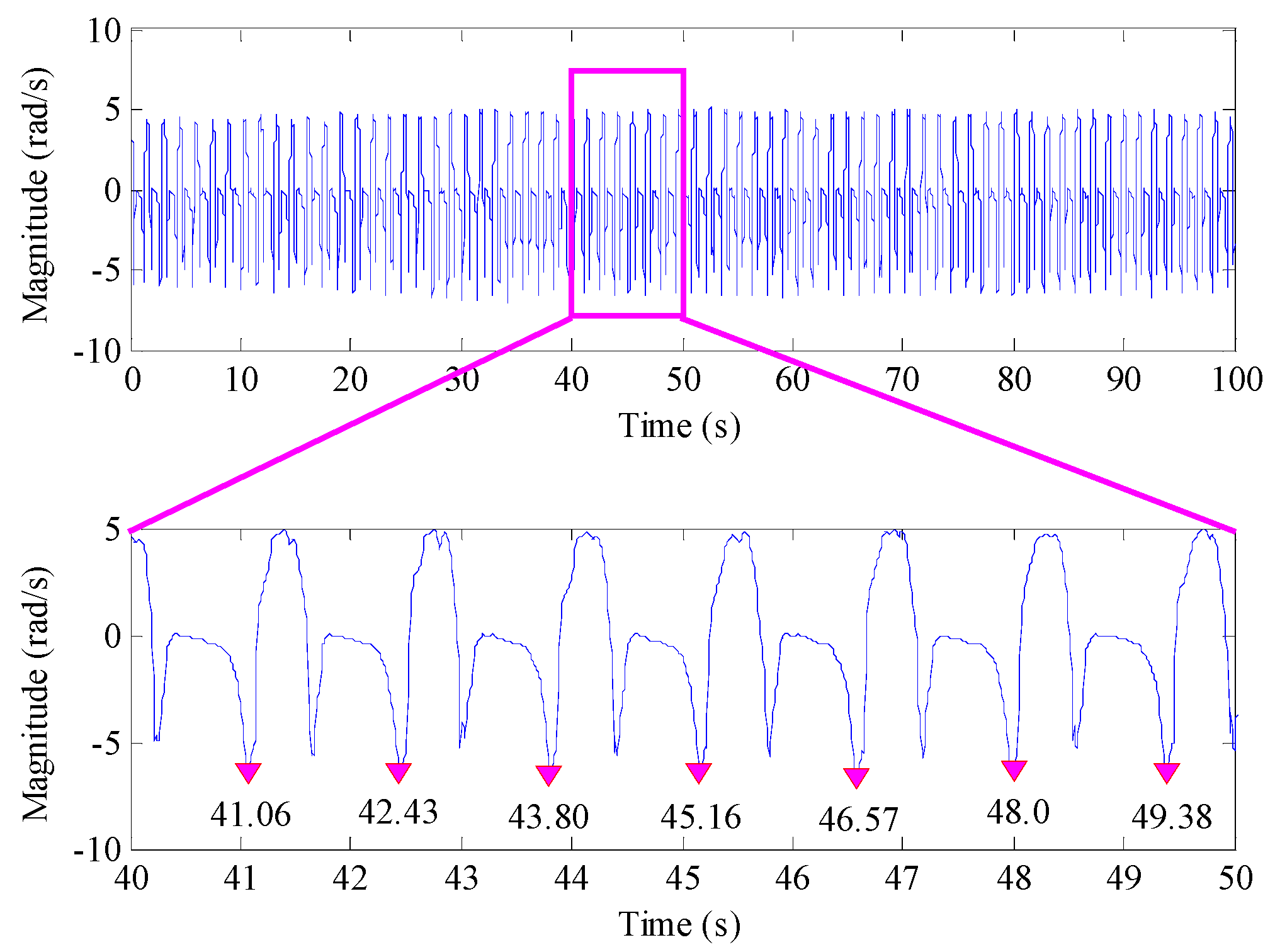
3.2.1. Gait Frequency Extraction Based on SPWVD-RMFI
- (1)
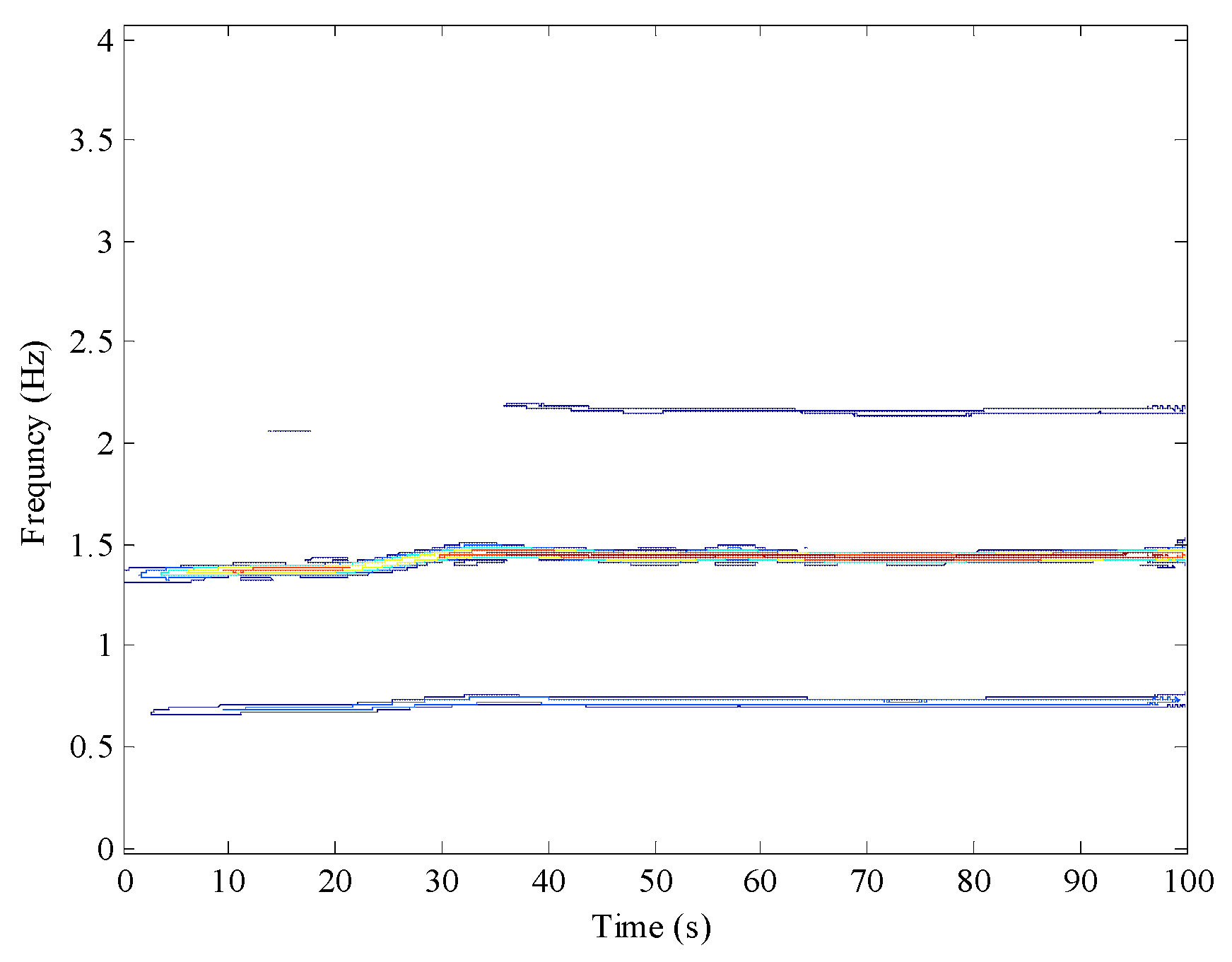
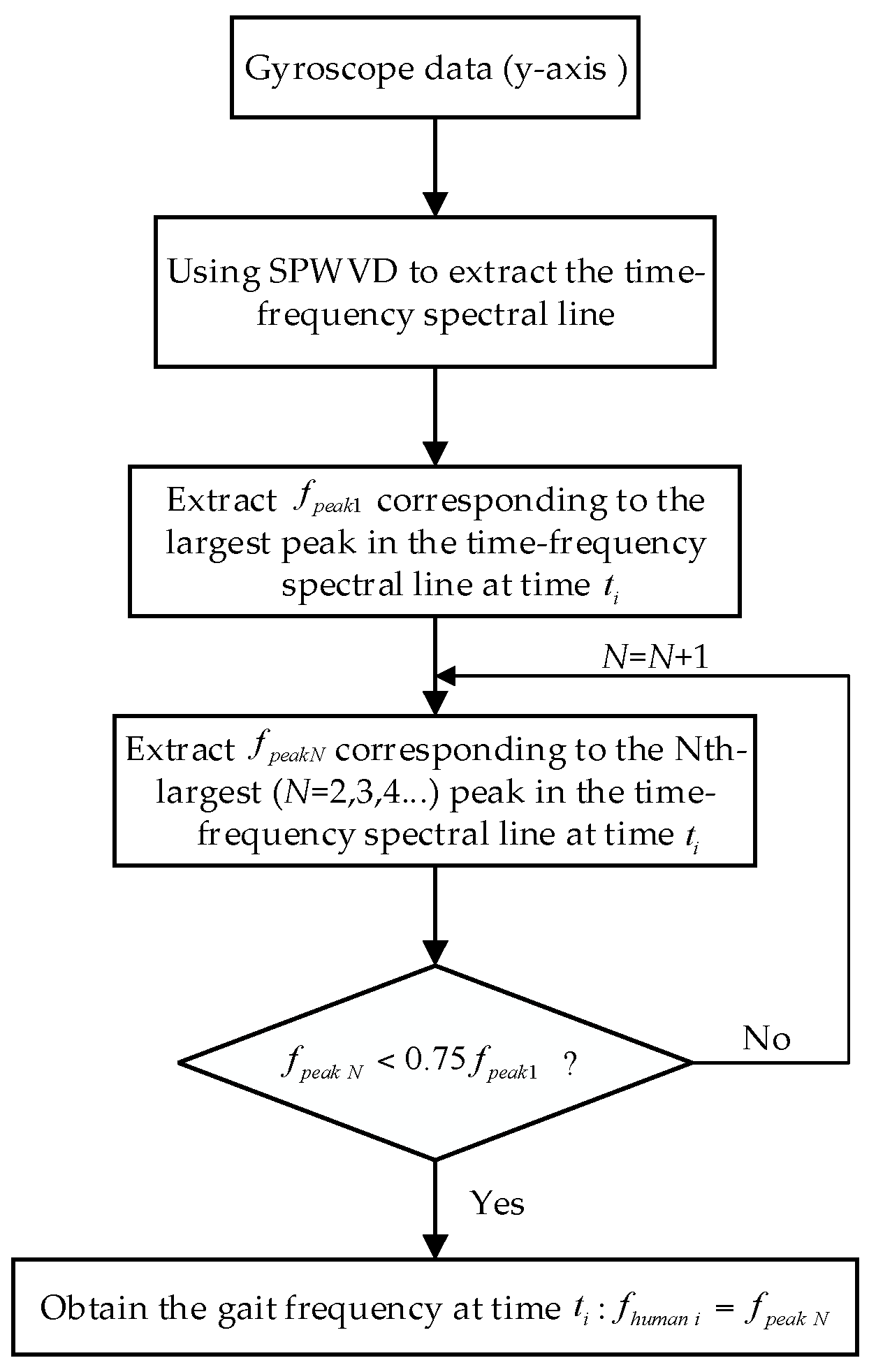
- Using the SPWVD to extract the time-frequency spectral line of the y axis gyroscope output.
- (2)
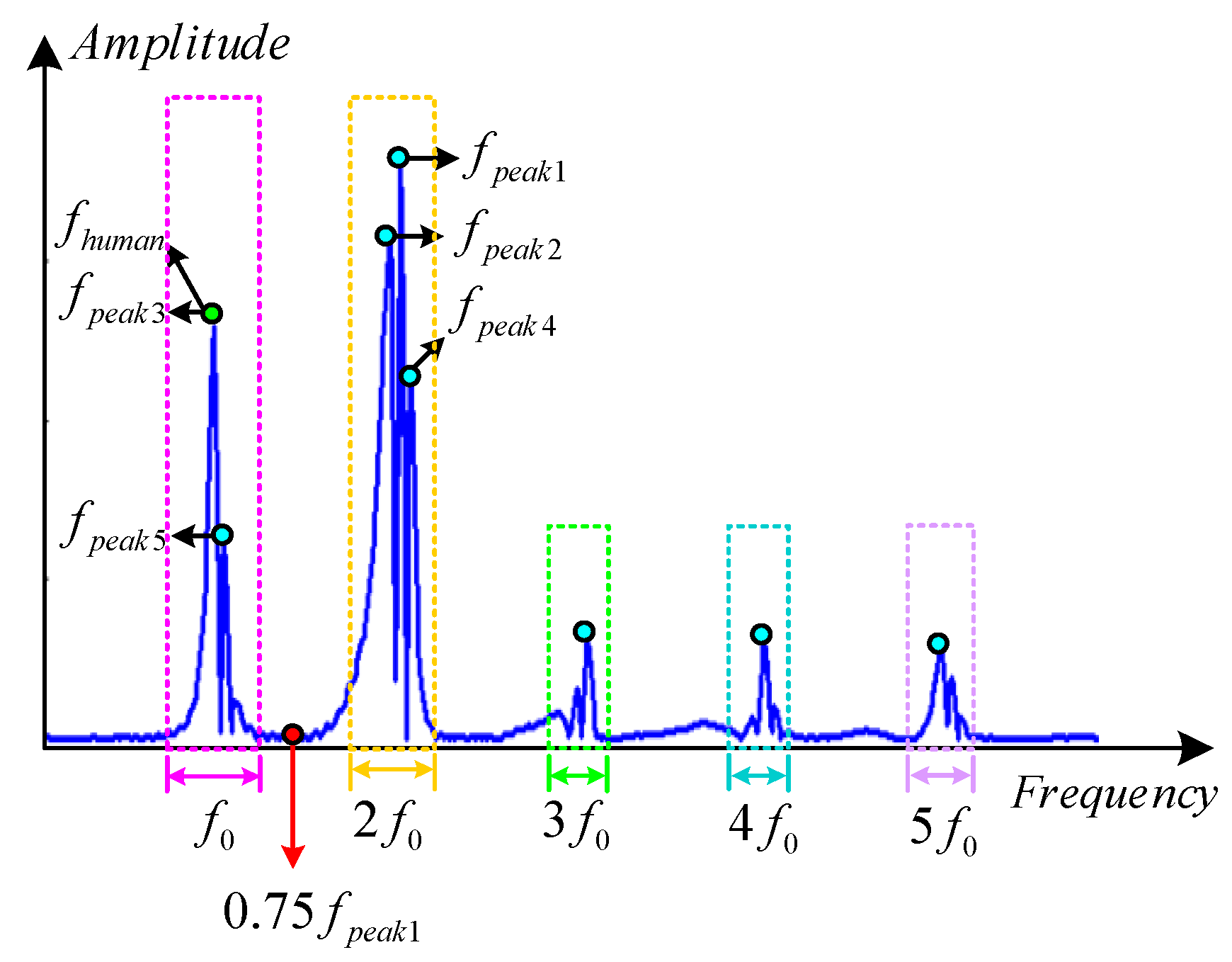
- Extract the frequency corresponding to the largest peak in the first time-frequency spectral line, as is shown in Figure 7; is in the range of frequency doubling ().
- (3)
- Extract the frequency corresponding to the second largest peak in the first time-frequency spectral line, and judge the relationship between and . If , it indicates that is in the range of one time frequency, namely that is the gait frequency corresponding to time during the walking process; otherwise, if , it indicates that is still in the frequency doubling range, which means that it is necessary to continue to extract the frequency corresponding to the N-th largest peak in the first time-frequency spectral line; meanwhile, the relationship between and needs to be judged according to the above-mentioned steps until the judge condition is fulfilled. At this moment, is the gait frequency corresponding to time during the walking process. The in is an integer greater than or equal to one.
- (4)
- Analyze other time-frequency spectral lines in (1) according to Steps (2)–(3); then, the gait frequency of any other time during the walking process can be obtained, where is an integer greater than or equal to one.
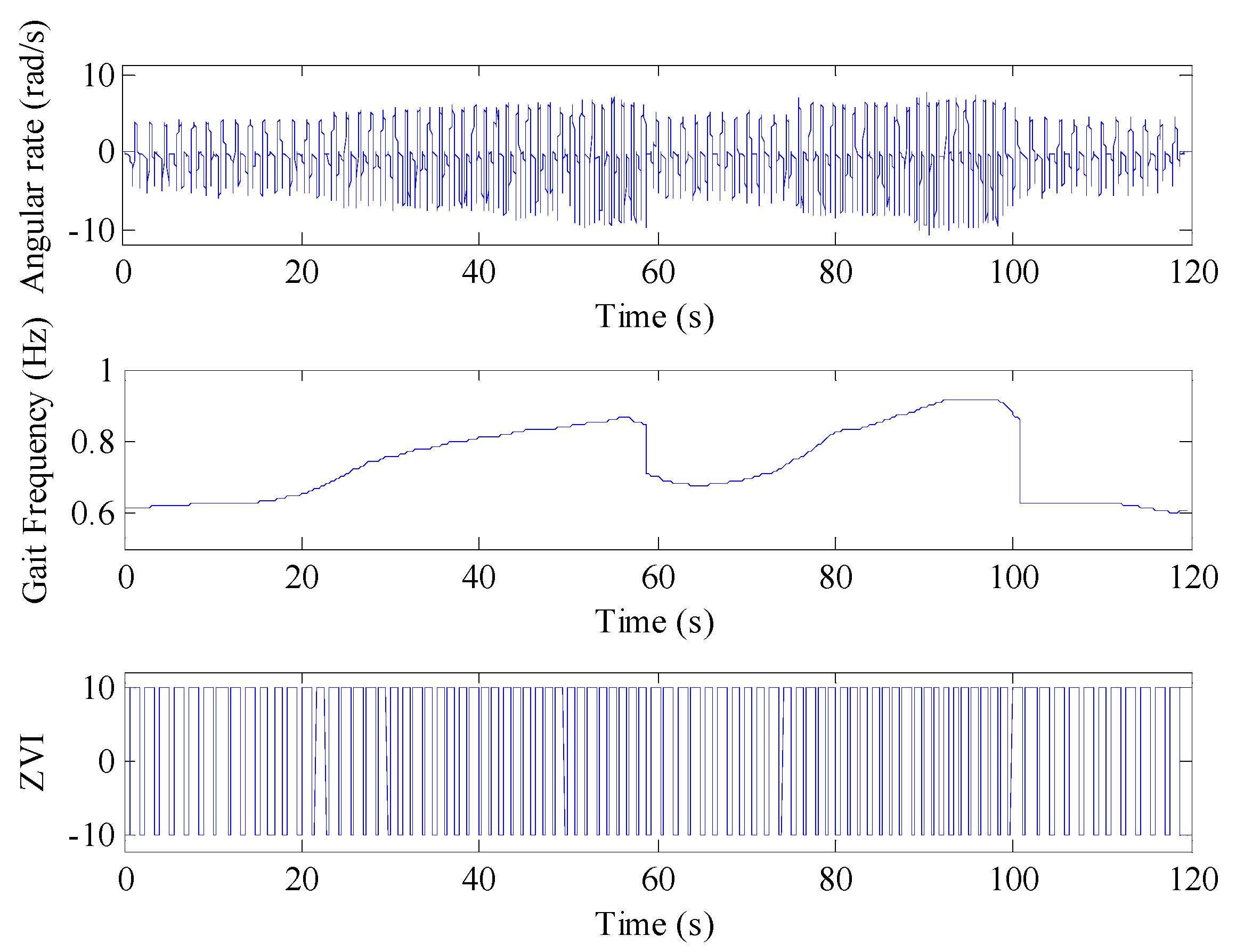
3.2.2. Adaptive ZVI Detection
4. Experiment Validation
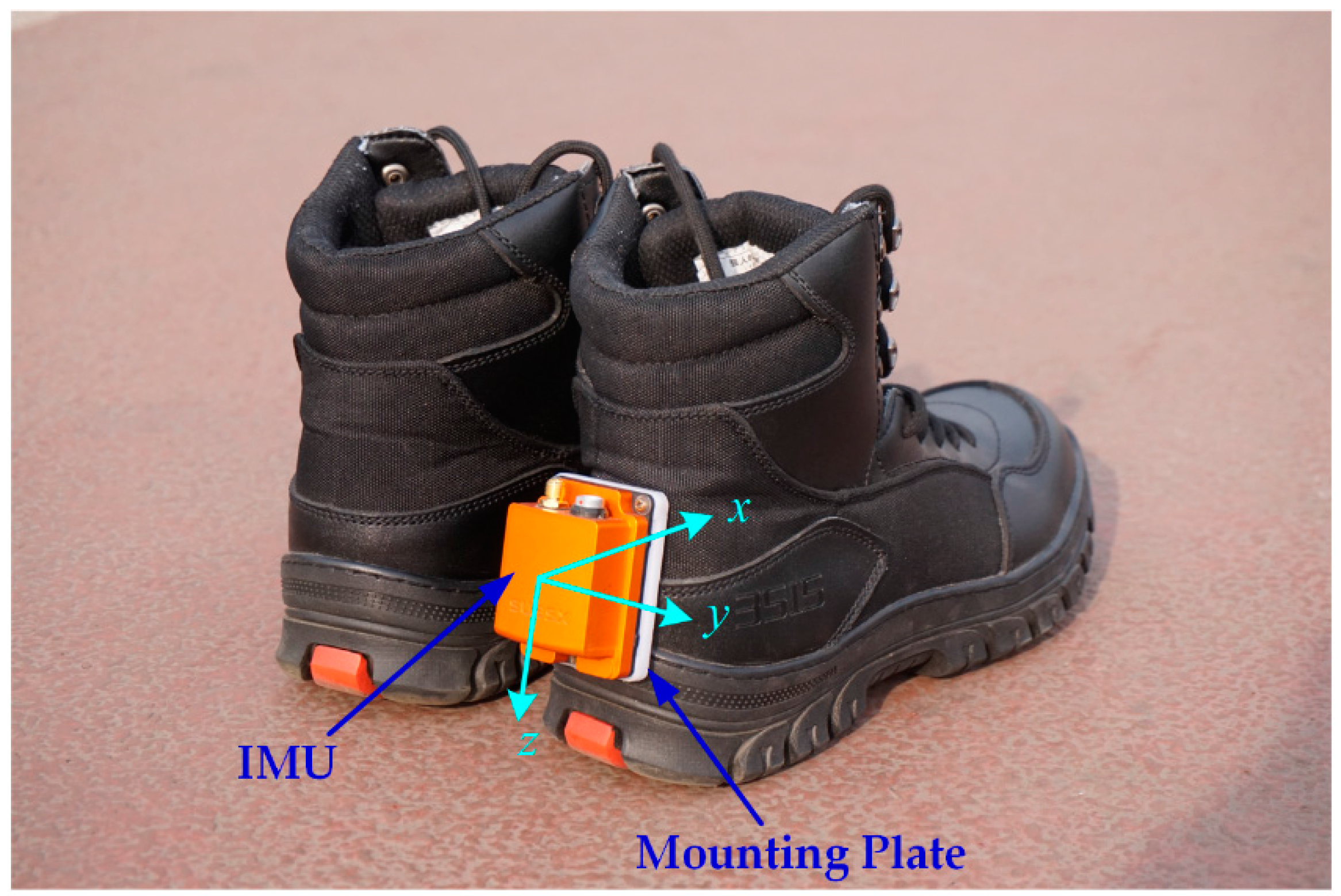
4.1. System Hardware Description
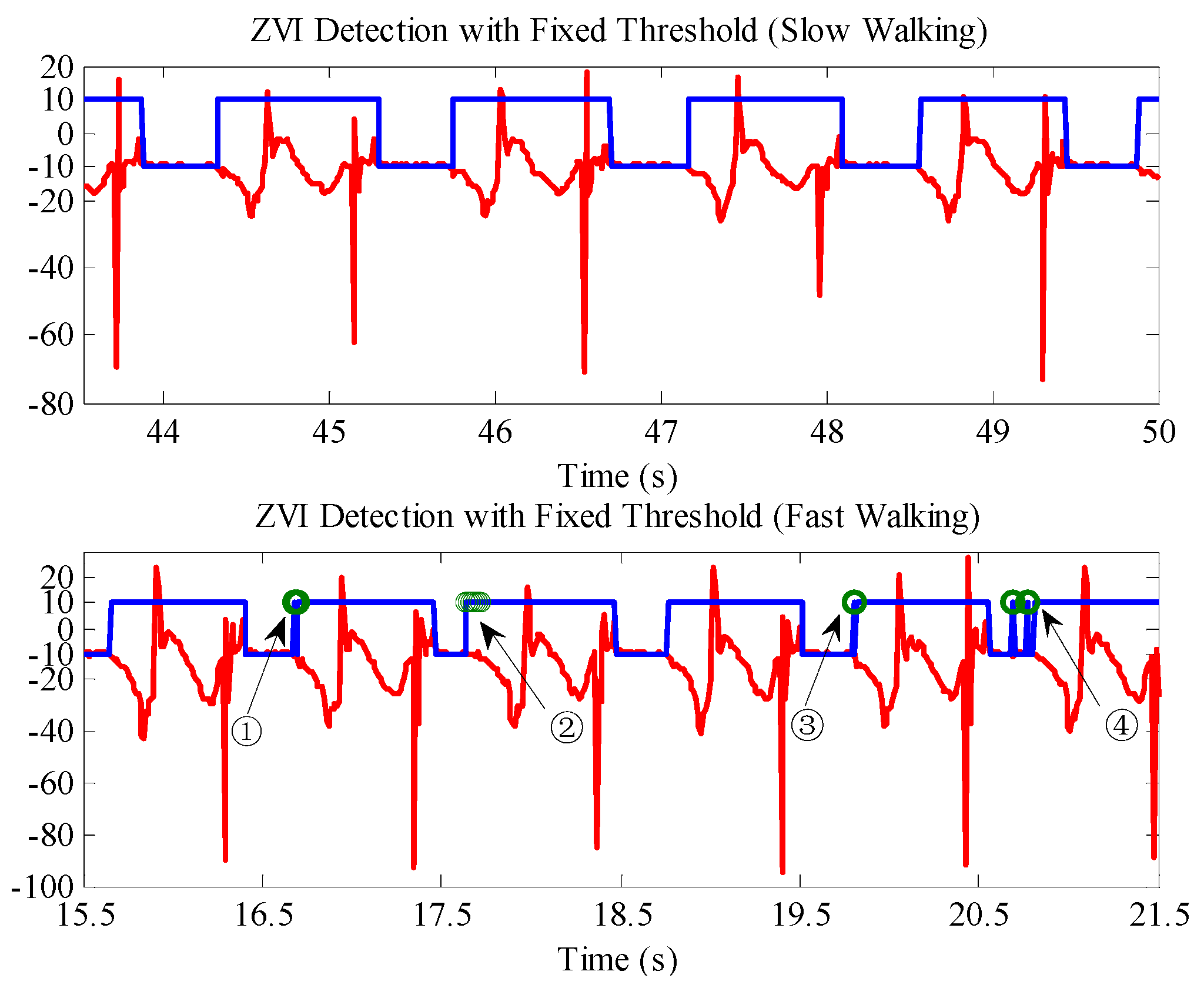
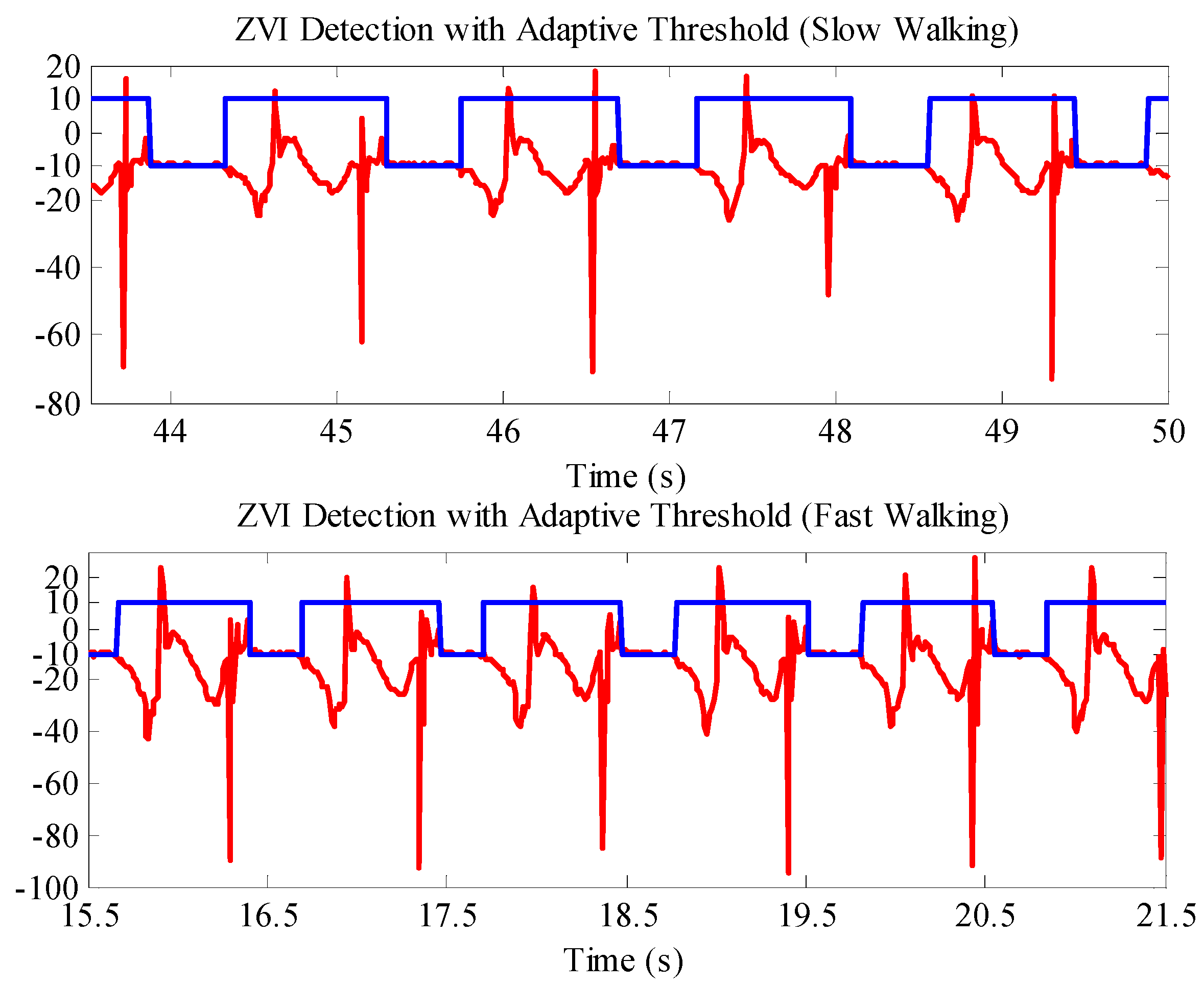
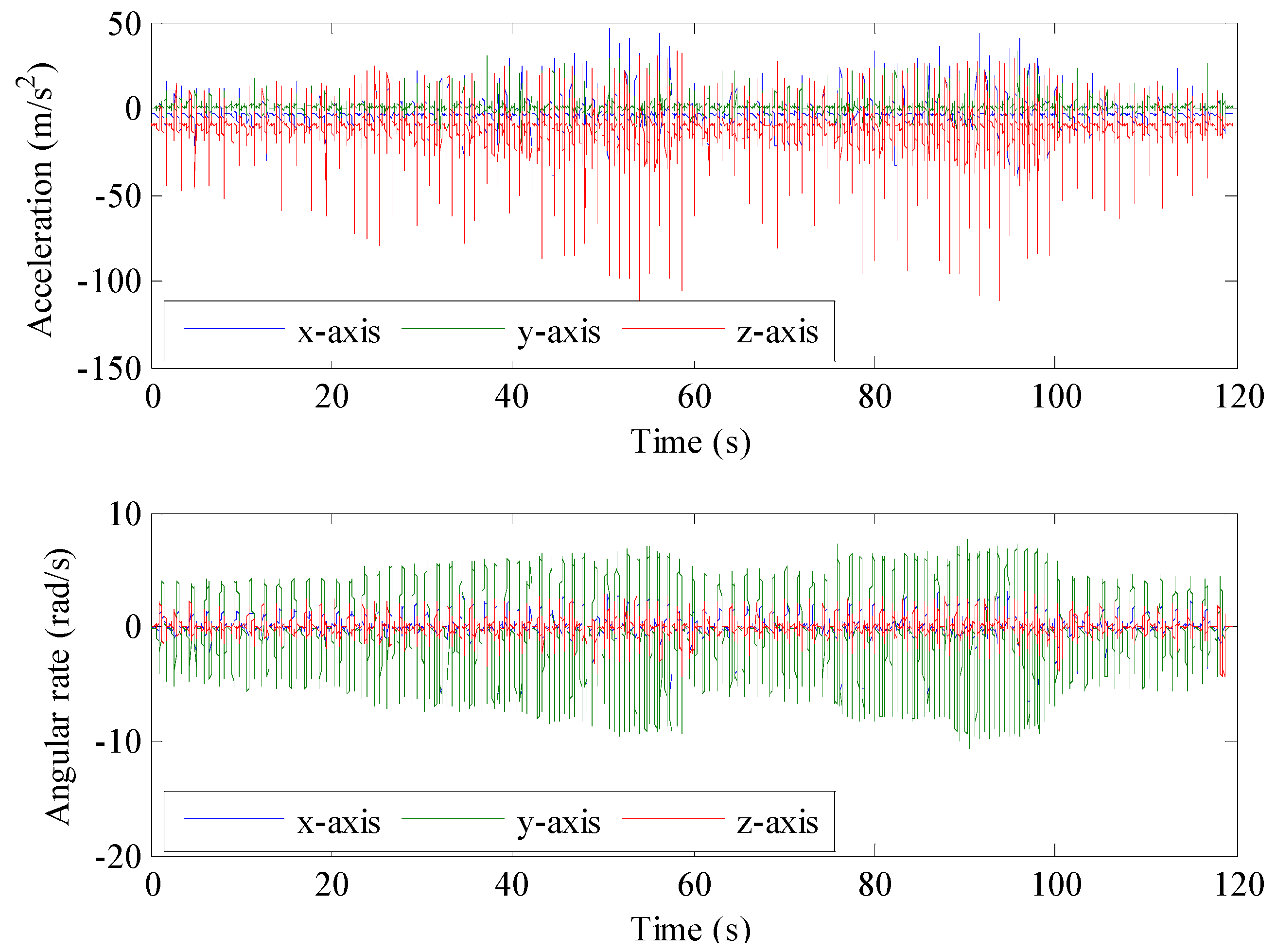
4.2. ZVI Detection Experiment
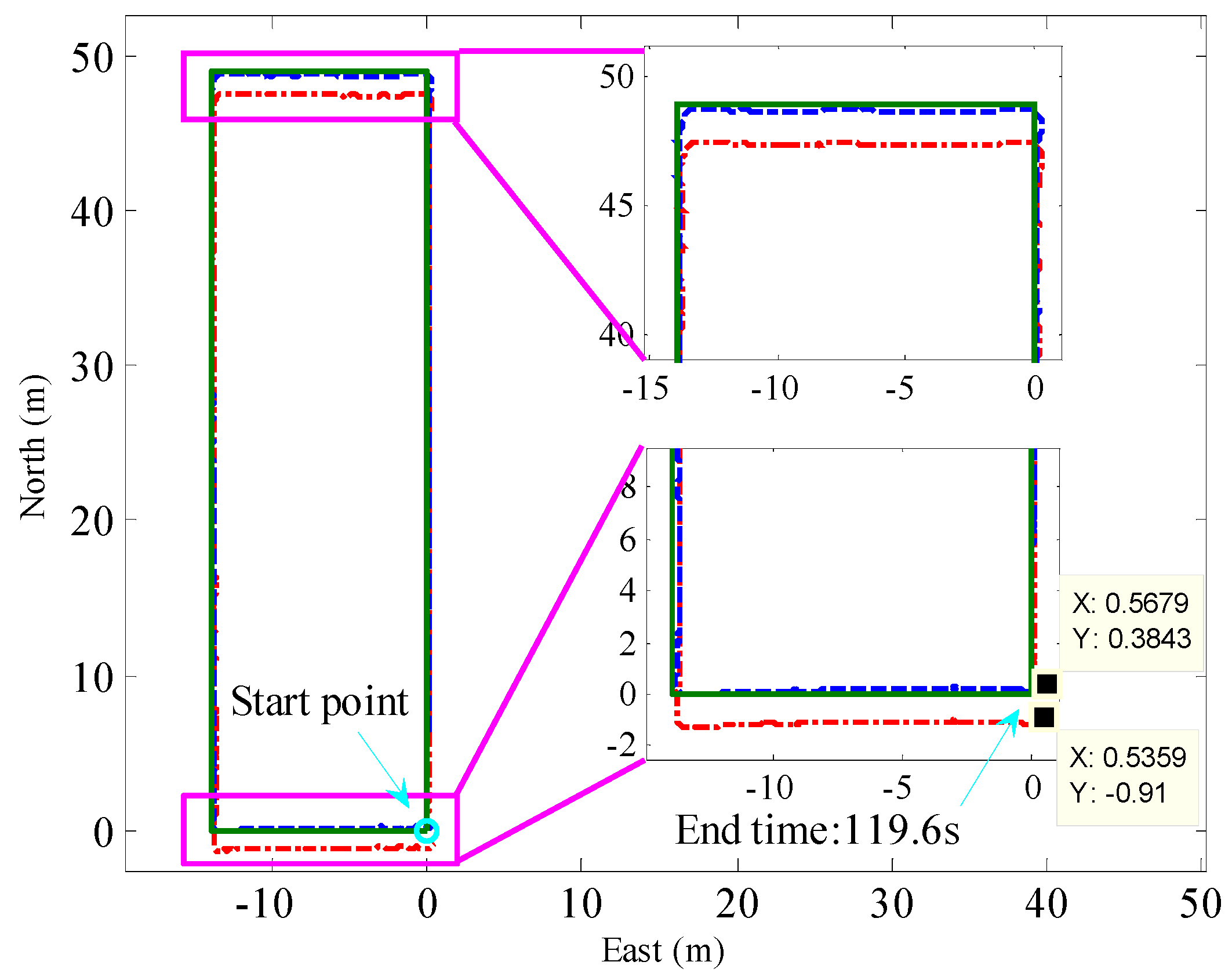
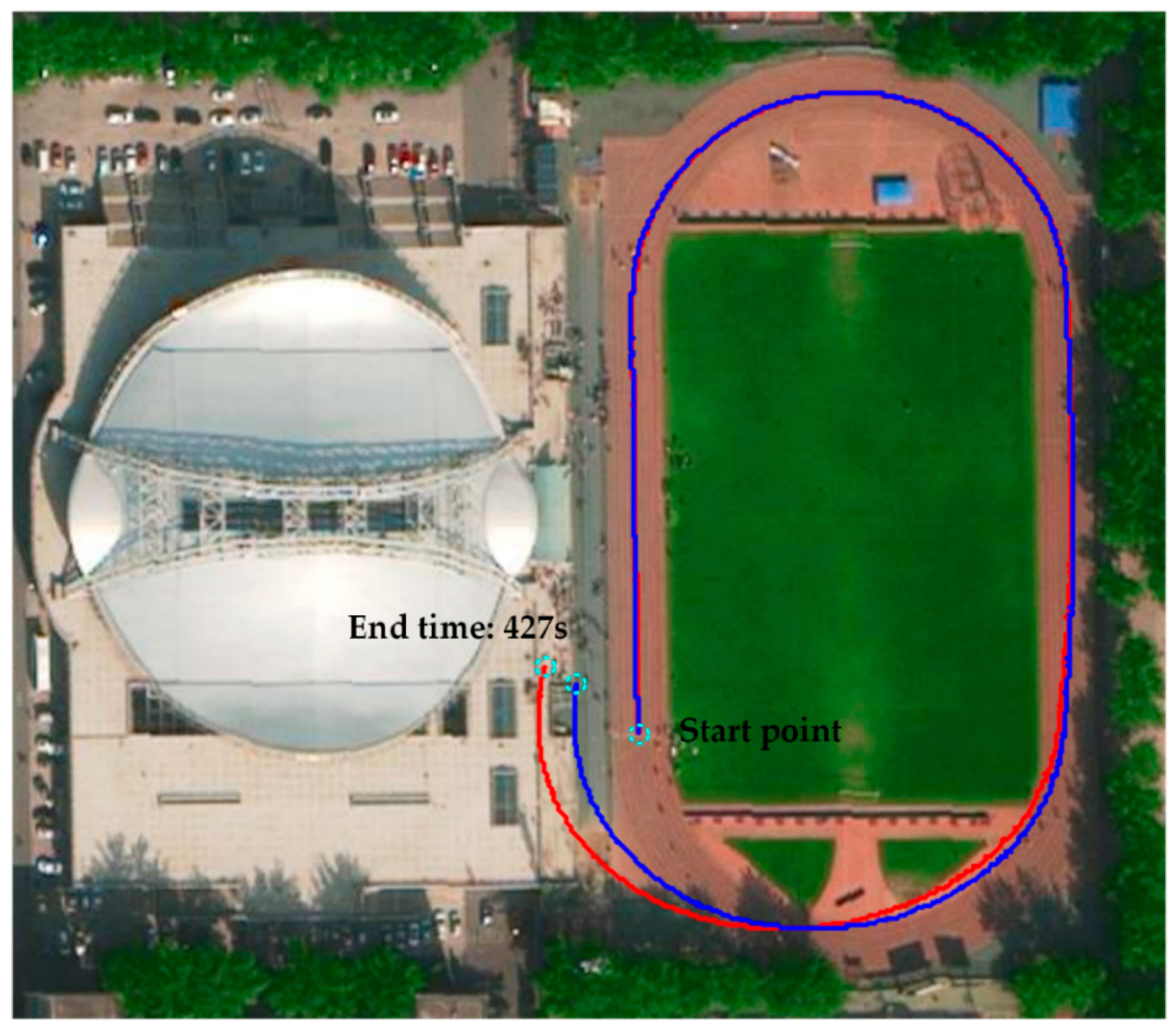
4.3. Pedestrian Trajectory Positioning Experiment
Rectangular Route Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ruiz, A.; Granja, F.; Honorato, J.P.; Rosas, J. Accurate pedestrian indoor navigation by tightly coupling foot-mounted IMU and RFID measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Hol, J.D.; Dijkstra, F.; Luinge, H.; Schon, T.B.; Enschede, B.V. Tightly coupled UWB/IMU pose estimation. In Proceedings of the 2009 International Symposium on Ultra-wideband, Vancouver, BC, Canada, 9–11 September 2009; pp. 688–692.
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Park, S.K.; Suh, Y.S. A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Downey, J.; Stancil, D.; Mukherjee, T. A low-power shoe-embedded radar for aiding pedestrian inertial navigation. IEEE Trans. Microw. Theory Tech. 2010, 58, 2521–2528. [Google Scholar] [CrossRef]
- Bebek, O.; Suster, M.A.; Rajgopal, S.; Fu, M.J.; Huang, X.; Cavusoglu, M.C.; Young, D.J.; Mehregany, M.; van den Bogert, A.J.; Mastrangelo, C.H. Personal navigation via high-resolution gait-corrected inertial measurement units. IEEE Trans. Instrum. Meas. 2010, 59, 3018–3027. [Google Scholar] [CrossRef]
- Zhou, C.; Downey, J.; Choi, J.; Stancil, D.; Paramesh, J.; Mukherjee, T. A shoe-embedded RF sensor for motion detection. IEEE Microw. Wirel. Compon. Lett. 2011, 21, 169–171. [Google Scholar] [CrossRef]
- Meng, X.; Sun, S.; Ji, L.; Wu, J.; Wong, W. Estimation of center of mass displacement based on gait analysis. In Proceedings of the 2011 International Conference on Body Sensor Networks, Dallas, TX, USA, 23–25 May 2011; pp. 150–155.
- Fischer, C.; Sukumar, P.T.; Hazas, M. Tutorial: Implementing a pedestrian tracker using inertial sensors. IEEE Pervasive Comput. 2013, 12, 17–27. [Google Scholar] [CrossRef]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Integrating low cost IMU with building heading in indoor pedestrian navigation. J. Glob. Position. Syst. 2011, 10, 30–38. [Google Scholar] [CrossRef]
- Benoussaad, M.; Sijobert, B.; Mombaur, K.; Coste, C. Robust foot clearance estimation based on the integration of Foot-Mounted IMU acceleration data. Sensors 2016, 16, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Feliz, R.; Zalama, E.; Gómez García-Bermejo, J. Pedestrian tracking using inertial sensors. J. Phys. Agents 2009, 3, 35–43. [Google Scholar]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Aiding MEMS IMU with building heading for indoor pedestrian navigation. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Kirkkonummi, Finland, 14–15 October 2010; pp. 1–6.
- Jiménez, A.; Seco, F.; Prieto, J.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for Yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010; pp. 135–143.
- Li, Y.; Wang, J. A pedestrian navigation system based on low cost IMU. J. Navig. 2014, 67, 929–949. [Google Scholar] [CrossRef]
- Godha, S.; Lachapelle, G.; Cannon, M.E. Integrated GPS/INS System for Pedestrian Navigation in a Signal Degraded Environment. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute-of-Navigation (ION GNSS 2006), Ft Worth, TX, USA, 26–29 September 2006; pp. 2151–2164.
- Nawab, S.; Quatieri, T.; Lim, J. Signal reconstruction from short-time Fourier transform magnitude. IEEE Trans. Acoust. Speech Signal Process. 1983, 31, 986–998. [Google Scholar] [CrossRef]
- Martin, W.; Flandrin, P. Wigner-Ville spectral analysis of nonstationary processes. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1461–1470. [Google Scholar] [CrossRef]
- Kwok, H.K.; Jones, D.L. Improved instantaneous frequency estimation using an adaptive short-time Fourier transform. IEEE Trans. Signal. Process. 2000, 48, 2964–2972. [Google Scholar] [CrossRef]
- Xsens Technologies B.V. MTi-G-700 User Manual. Available online: https://www.xsens.com/products/mti-g-700/ (accessed on 22 September 2016).
- Godha, S.; Lachapelle, G. Foot mounted inertial system for pedestrian navigation. Meas. Sci. Technol. 2008, 19, 1–9. [Google Scholar] [CrossRef]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Aiding low cost inertial navigation with building heading for pedestrian navigation. J. Navig. 2011, 64, 219–233. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Walking Speed (Steps/min) | Actual ZVI Number | Detected ZVI Number | |
|---|---|---|---|
| Fixed Threshold Method | Adaptive ZVI Detection Algorithm | ||
| 80 | 100 | 102 | 100 |
| 100 | 100 | 100 | 100 |
| 120 | 100 | 94 | 100 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, X.; Chen, J.; Han, Y.; Shang, J.; Li, N. A Novel Zero Velocity Interval Detection Algorithm for Self-Contained Pedestrian Navigation System with Inertial Sensors. Sensors 2016, 16, 1578. https://doi.org/10.3390/s16101578
Tian X, Chen J, Han Y, Shang J, Li N. A Novel Zero Velocity Interval Detection Algorithm for Self-Contained Pedestrian Navigation System with Inertial Sensors. Sensors. 2016; 16(10):1578. https://doi.org/10.3390/s16101578
Chicago/Turabian StyleTian, Xiaochun, Jiabin Chen, Yongqiang Han, Jianyu Shang, and Nan Li. 2016. "A Novel Zero Velocity Interval Detection Algorithm for Self-Contained Pedestrian Navigation System with Inertial Sensors" Sensors 16, no. 10: 1578. https://doi.org/10.3390/s16101578
APA StyleTian, X., Chen, J., Han, Y., Shang, J., & Li, N. (2016). A Novel Zero Velocity Interval Detection Algorithm for Self-Contained Pedestrian Navigation System with Inertial Sensors. Sensors, 16(10), 1578. https://doi.org/10.3390/s16101578