1. Introduction
Recent developments in aircraft technology have focused attention on the airborne optical systems of supersonic aircraft [
1,
2]. The temperature fields of supersonic aircraft in flight are extremely affected by the complexities of the thermal environment, such as environmental temperature, air flow, the aerodynamic heating effect and solar radiation, resulting in internal temperature gradients of the optical system. Both the geometry and performance of airborne optical components are affected [
3]. For example, changes in geometry and the index of refraction can lead to failure of the optical system [
4]. The thermal environment of optical systems, particularly those for navigation guidance and control that require high performance in terms of light spot size and target positioning, must therefore be taken into consideration during design.
Airborne optical systems for navigation guidance and control are comprised of two parts; the front dome and the rear internal optical lens. Xiao et al. studied the influences of a non-uniform aerodynamic flow field and aerodynamic heating on the index of refraction and profile of the dome, and assessed imaging quality degradation in the airborne optical system using a fourth-order Runge-Kutta algorithm [
1]. Wang et al. presented the use of uniform and hexahedral grids generated from computational fluid dynamics for the analysis of aero-optical performance [
5]. Few thermal analyses have been conducted on airborne rear optical lenses with external load changes. Based on the thermal sensitivity method, Blaurock et al. investigated optical sensitivity to temperature using finite element analysis (FEA) [
6]. Applewhite et al. studied the effects of thermal gradients on the Mars Observer Camera primary mirror [
4]. Most studies have focused on component thermal analyses of the front dome and the rear internal optical lens in independent temperature fields.
However, there are certain problems with this approach. (1) During flight, the dome comes into direct contact with the exterior thermal environment. The rear optical lens receives heat through conduction. Hence, a performance analysis of solely the dome or the rear optical lens will be incomplete. The airborne optical system for navigation guidance and control should be considered as a whole in any evaluation of the influence of the thermal environment on its performance; (2) The purpose of thermal analysis of optical systems is to facilitate athermal design, so an understanding of the effects of changes in flying and structural parameters on the temperature field is required; (3) During system design, integrated optical-structural-thermal analysis is repeatedly carried out for verification. A massive amount of iterative computation is required, as the analysis relies on the finite element method (FEM), the finite volume method and other numeric simulation methods when calculating the crucial system parameters. A systematic and integrated thermal analysis technology that can increase the computation efficiency of integrated optical-structural-thermal analysis is therefore required.
To achieve a systematic integrated thermal analysis of navigation guidance and control airborne optical systems, systematic deduction is proposed in this study. First, we derive relational expression between the front temperature field and the emergent ray angles, and the amplification of the results of the rear lens by accounting for the effects of the temperature field on the physical geometry and ray tracing performance of the front dome and rear optical components. The relational expressions between the front temperature field, the light spot size and the positioning precision of the rear optical lens are then found. To investigate the effects of flying parameters and system structural parameters on the temperature field, an empirical equation was then developed to describe the relationship between the front temperature gradient or rear thermal diffusion distance and basic factors such as the optical-structural nature of the airborne optical system, flight speed and flight time. Finally, using a specific system layout as an example, the factors linked with the front temperature field and the internal thermal diffusion speed were analysed. These served as the basic criteria for the performance of the rear optical system.
In summary, by using empirical equations, the system temperature field and the influence of the front temperature gradient on system performance were calculated directly, which enabled rapid integrated optical-structural-thermal analysis for achieving the crucial system parameters. Finally, experimental FEA validation indicated that this method can dramatically reduce the required analysis time.
3. Results
In this section, the empirical equations in the temperature field (which includes airborne optical system structure, flight speed and flight time under thermal diffusion conditions), are investigated based on numeric simulations using the flying and structural parameters of the optical systems used for navigation guidance and control in supersonic aircraft. As stated above, during the integrated analysis of the optical system, the parameters of the front dome and the rear optical lens are both taken into account to ensure that the rear lens is not influenced. Changes in the performance of the rear lens can lead to further decreases in the performance of the overall system. The influence of structural parameters on thermal diffusion distance were therefore investigated based on FEA and factor experiments to derive the empirical equations for analysing the effects of thermal diffusion on the airborne optical system.
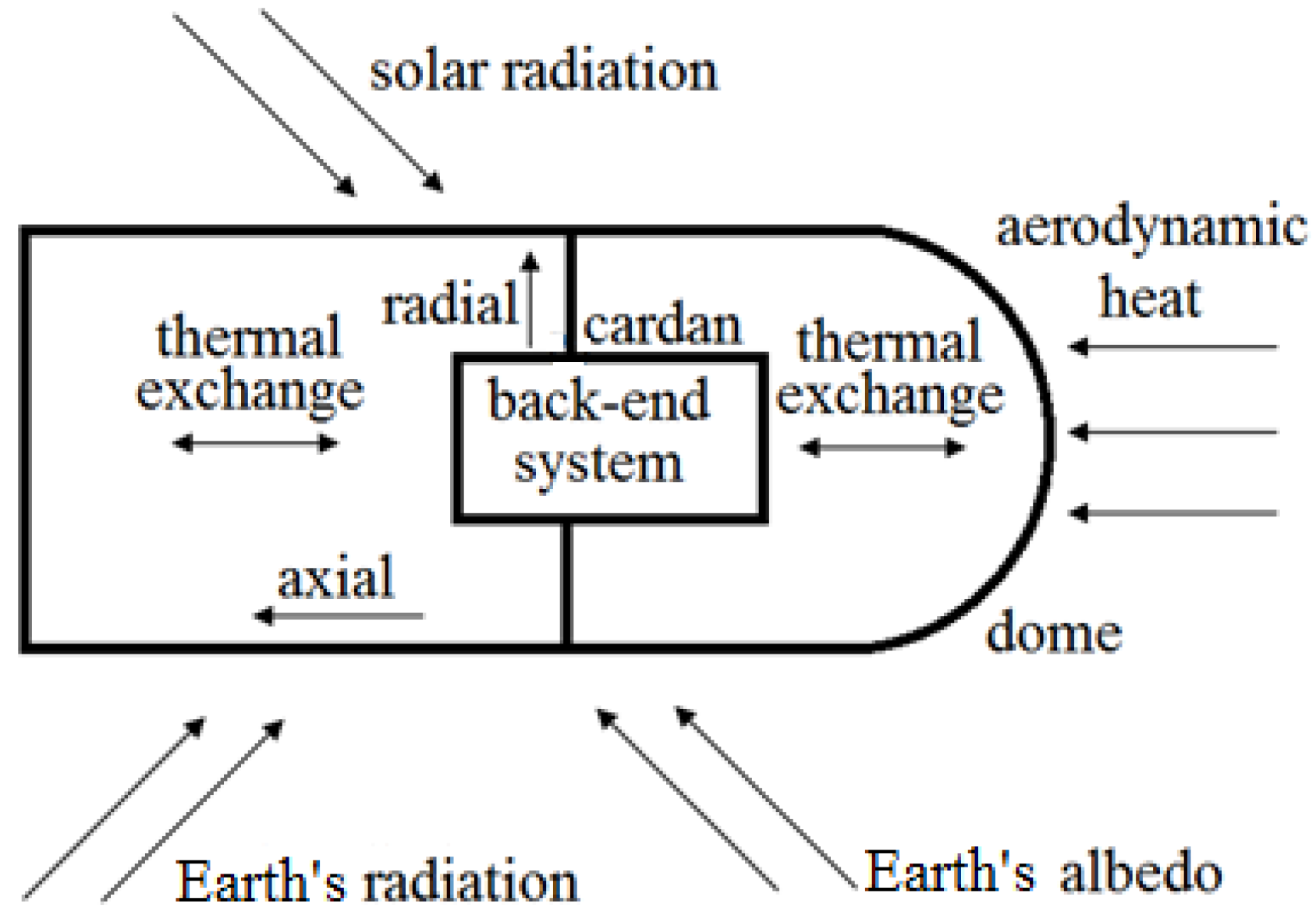
The thermal load of optical systems for navigation guidance and control in supersonic aircraft is concentrated on the front dome, which directly exchanges heat with the outside. The heat of the rear optical lens is conducted via the aircraft from the dome, so unlike the dome, it does not always suffer from large effects under all conditions. Only when the change in temperature reaches a certain magnitude will the performance of the system be significantly affected. Therefore, when investigating the influence of different factors on the aircraft’s internal temperature field, the effects on the rear optical lens should be evaluated early on in the design. The dome parameters and rear structural parameters can then be optimised, based on the analysis of the relationship between the position of the isothermal surface at a specific temperature and the flying and structural parameters. An athermal design under thermal diffusion conditions is then enabled and the systematic optimisation of structural parameters for the dome and optical lens can prevent thermal diffusion from the dome to the rear optical lens.
FEA and factor experiments were carried out for aircraft structural and flying parameters based on numeric simulation to derive empirical equations involving airborne optical system structure, flight speed and flight time under thermal diffusion conditions. First, to explore the influence of dome curvature, aircraft speed and time on the performance of the optical system, three simulation experiments were conducted in ANSYS, illustrating the aircraft temperature field distribution under different conditions. Using a constant flight speed (400 m/s), material thermal conductivity (800 W
/m·K), specific heat (900 J/kg·K) and material density (2000 kg/m
3), the dome radius of curvature and flight time were adjusted to assess the rule of thermal diffusion inside the aircraft. Four groups of data were tested and the results are given in
Table 1. The thermal diffusion distance is the distance between the isothermal surface and the front of the cylindrical shell when the temperature increases by 2 °C. Although a variation of the dome radius of curvature was found to influence aerodynamic heat flux, the rear of the aircraft would not be affected over a flight time of under 50 s, as shown in
Table 1. Longer flight times led to significant increases in the thermal diffusion to the rear end.
Flight speed influences aerodynamic heat, so an analysis of flight speed was achieved by changing the aerodynamic thermal load. Similarly, four groups with different dome radius of curvature and flight time were selected. For each group, FEA was performed at three different flight speeds and the corresponding temperature field distribution was derived.
Table 2 shows the temperature increase at the stagnation points. The modified Lees equation indicated a proportional relationship between aerodynamic heat flux and cubic flight speed.
Table 2 shows that when only flight speed (aerodynamic thermal load) was changed, the increase in temperature at the stagnation points was proportional to the aerodynamic heat, which also applies to all other points of the aircraft because the thermal conduction differential equation under conditions of no internal thermal source is a linear differential equation with constant coefficients, so the whole system becomes linear:
where
T is temperature,
k is thermal conductivity factor,
t is time,
c is specific heat,
ρ is density and (
x,y,z) are Cartesian coordinates.
As shown in
Table 2, for a specific aircraft flying for the same amount of time, if the rear optical lens is not affected at low flight speeds (i.e., there are no changes in temperature at the rear end), changes in temperature at high speed will remain small. However, if the system is affected at low speed, the temperature change will be more significant at high flight speeds.
The material properties of the aircraft (i.e., specific heat, density and thermal conductivity factors) also influenced the degree of thermal diffusion. Heat is expressed as follows:
where
Q is the heat inflow of the material,
c is specific heat,
is the mass and Δ
T is the change in temperature. The mass
m is proportional to density
ρ at a fixed volume, so the change in temperature is proportional to the change in heat when the value of the product
cρ is constant. Combining Equations (8) and (9), the product of specific heat and material density
cρ can be considered as a single parameter in the analysis. When
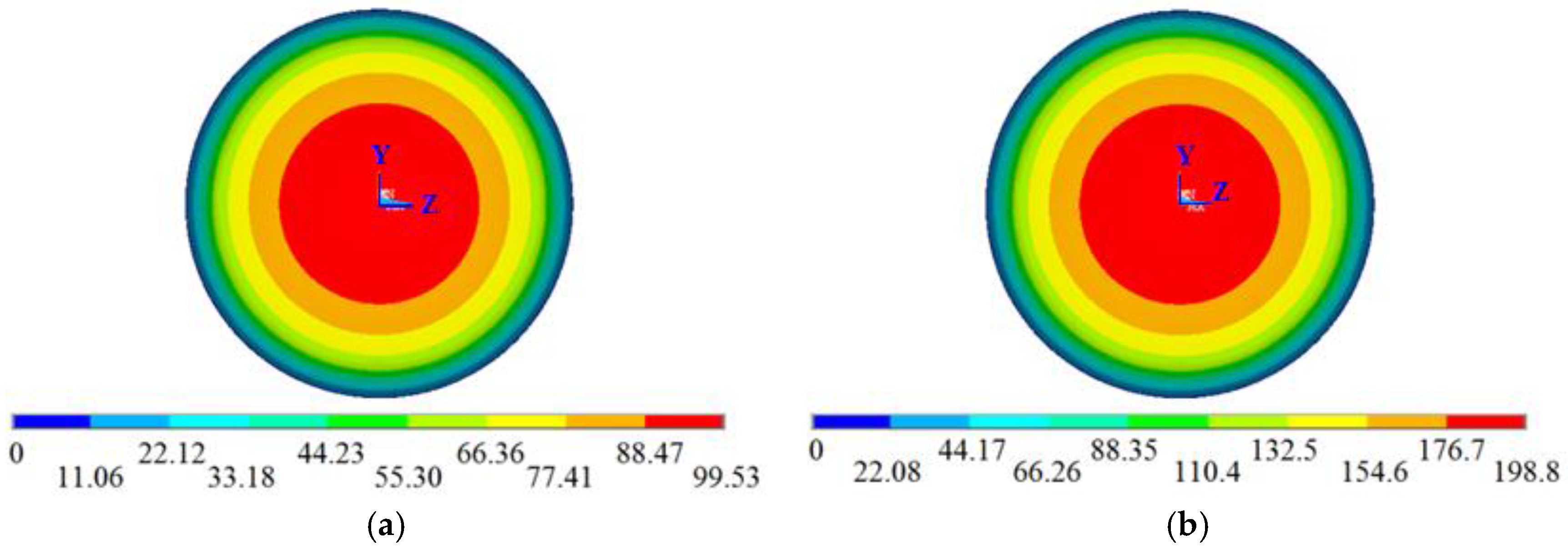
cρ increased, the speed of thermal diffusion decreased and the position of the isothermal surface was constant and close to the dome, as shown in
Figure 6. The thermal diffusion otherwise accelerated as
cρ decreased. The following FEA experiment was carried out to verify the speculation. The flight time, speed, dome radius and thermal conductivity factor were set to 20 s, 400 m/s, 530 mm and 800 W
/m·K, respectively. Three sets of different specific heat and density were used during the simulation. To illustrate that the two parameters could be combined, their values were changed during every simulation. In the first group, the specific heat was 600 J/kg∙K and the density was 6000 kg/m
3; in the second, the specific heat was 450 J/kg∙K and the density was 4000 kg/m
3; and in the third, the specific heat was 900 J/kg∙K and the density was 1000 kg/m
3. The increases in temperature at the stagnation points are listed in
Table 3. The results indicate that the aircraft temperatures at different positions were inversely related to
cρ. The influence of 1/
cρ on the temperature field was observed to be similar to that of aerodynamic heat. Therefore, the change in
can be considered to be approximately equivalent to the change in aerodynamic heat; when 1/
cρ was changed by a certain ratio, the aerodynamic heat was considered to change by the same ratio.
Equation (8) describes the influence of the thermal conductivity factor k on the thermal diffusion distance. With increasing k, the rate of change of temperature increases accordingly, resulting in fast thermal diffusion to the rear end.
In contrast, decreases in the thermal conductivity factor can cause a concentration of heat at the front, resulting in low temperatures near the rear end, as confirmed by the FEA experiment on the influence of thermal conductivity factor on the temperature field. Different thermal conductivity factors were investigated at constant values of flight time (20 s), flight speed (400 m/s), dome radius (530 mm), specific heat (900 J/kg∙K) and density (2000 kg/m
3). The results are shown in
Table 4.
Based on the FEA results of the simulation, the least square method was used to determine the empirical Equation (10), or the relational equation between thermal diffusion and factors such as dome radius, flight time and material thermal conductivity. As shown in
Table 2, if the rear lens is not affected at low speeds, it is not affected at high speeds. Therefore the flight speed and equivalent specific heat and density were not included in the formula. However, the temperature at the thermal diffusion distance can be estimated based on flight speed, material density and specific heat by using the FEA experiments and the function fitting method.
where
F(
r,t,k) is the thermal diffusion distance,
r is dome outer radius (mm),
t is flight time (s) and
k is the material’s thermal conductivity factor (W/m∙K).
The same method was used to investigate the temperature field of the front dome, producing the empirical Equation (11) of the temperature gradient:
where
T is the temperature gradient value (K) at 0 and 250 mm of the dome radius; the definitions of
r,
t and
k are as above.
v is speed (m/s),
c is specific heat (J/kg∙K) and
ρ is density (kg/m
3). The results indicated that all flying parameters and system structural parameters significantly influence the temperature field.
4. Discussion
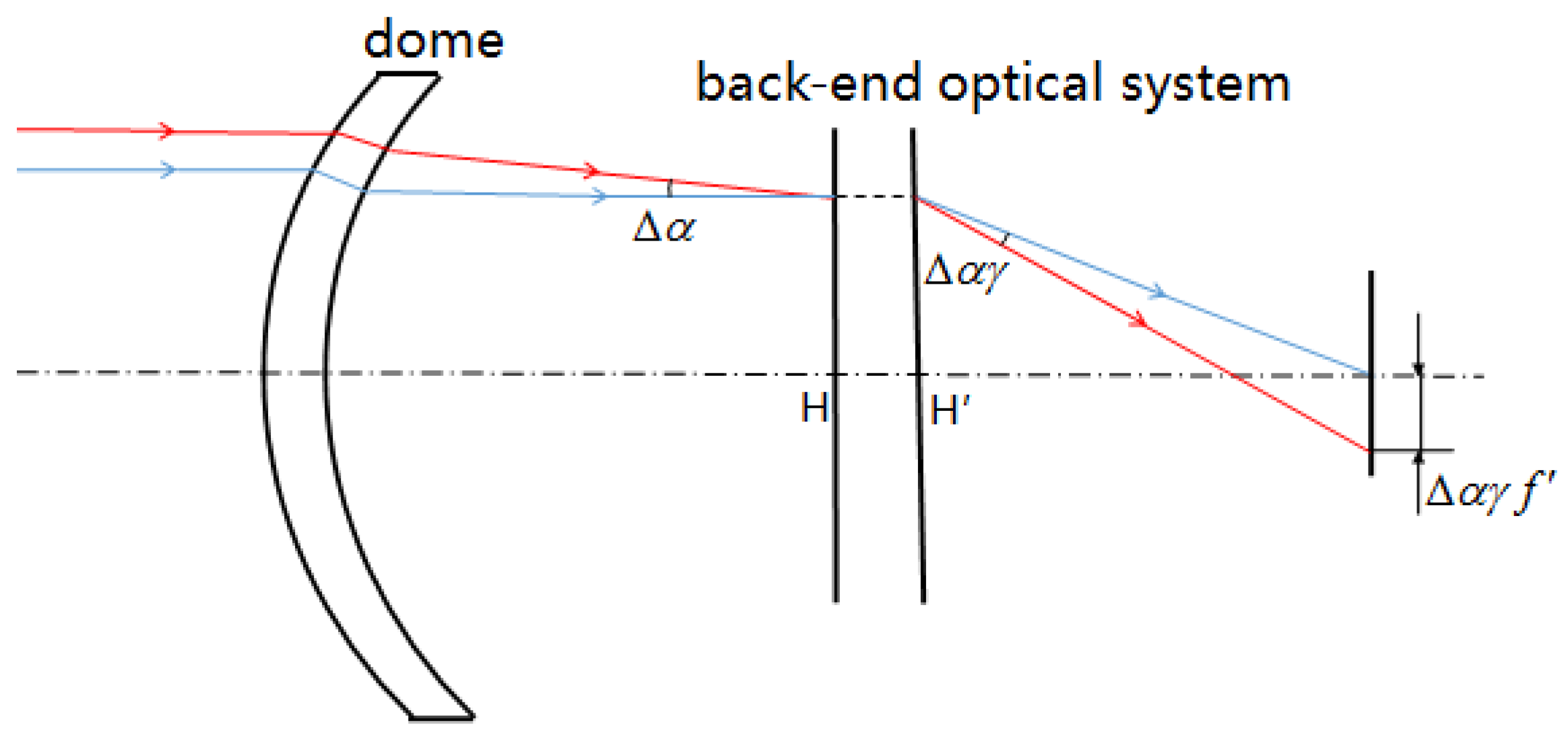
To validate the above analysis, a specific system layout was used to study the applicability of the integrated thermal-mechanical-thermal analysis method. The flying parameters and aircraft structural parameters were as follows: flight time 35 s, flight speed 500 m/s, front surface radius of the dome 670 mm, material density 3600 kg/m3, thermal conductivity factor 400 W/m·K, specific heat 700 J/kg∙K, angle magnification of rear optical lens 1.25 and focal length 17.9 mm.
The empirical equations in
Section 3 were then used to calculate the temperature gradient of the front dome and to determine whether the rear system was affected. The equations in
Section 2 and
Appendix B were used to calculate the influence of the temperature field on the light spot radius. According to Equation (10), the rear thermal diffusion distance was 281.3 mm and the corresponding temperature was 2.79 °C, so it can be concluded that the rear lens was not affected. The system performance can thus be determined from the front temperature gradient and the original rear lens structure. However, due to the large dome surface temperature gradient of 43.1 °C in the front, the performance of the whole optical system was greatly affected. Based on Equation (5) and the equations in
Appendix B, the light spot diameter was found to be 0.0781 mm. The duration of the calculation can be expected to be less than 1 s.
For method validation and comparison, experiments using ANSYS software were also carried out for environmental analysis. The element density of the dome was 5.08 elements/cm
3, and that of the cylindrical shell was 0.5 element/cm
3. A computer with a dual-core i3-3220 processor, 3.3 GHz CPU and 4 GB memory was used and required a computation time of 7 h. Code V was then used for performance analysis [
16] according to the temperature field distribution parameters obtained in ANSYS. After setting the thermal refractive index coefficient, the surface profile and refractive index at every position were calculated using CODEV software.
The aircraft temperature field is shown in
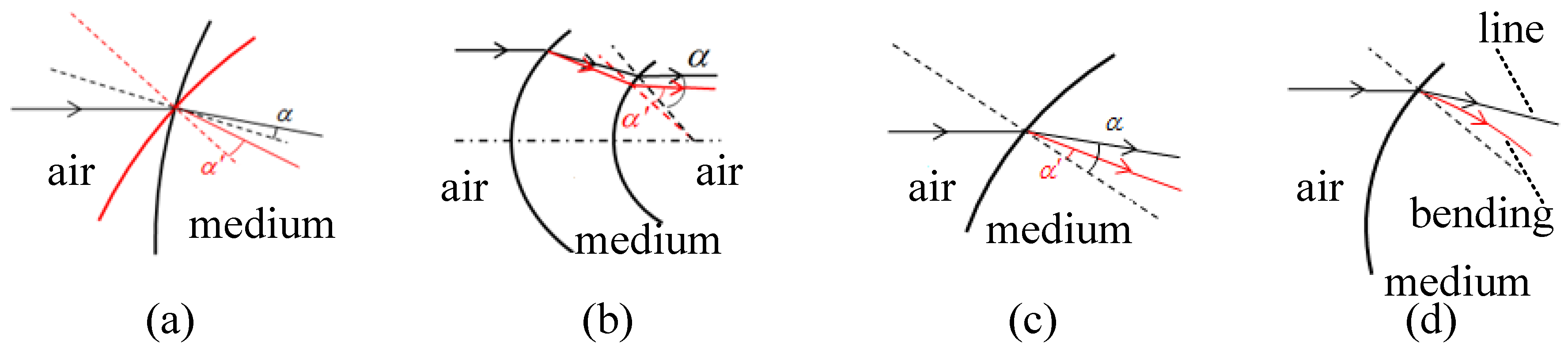
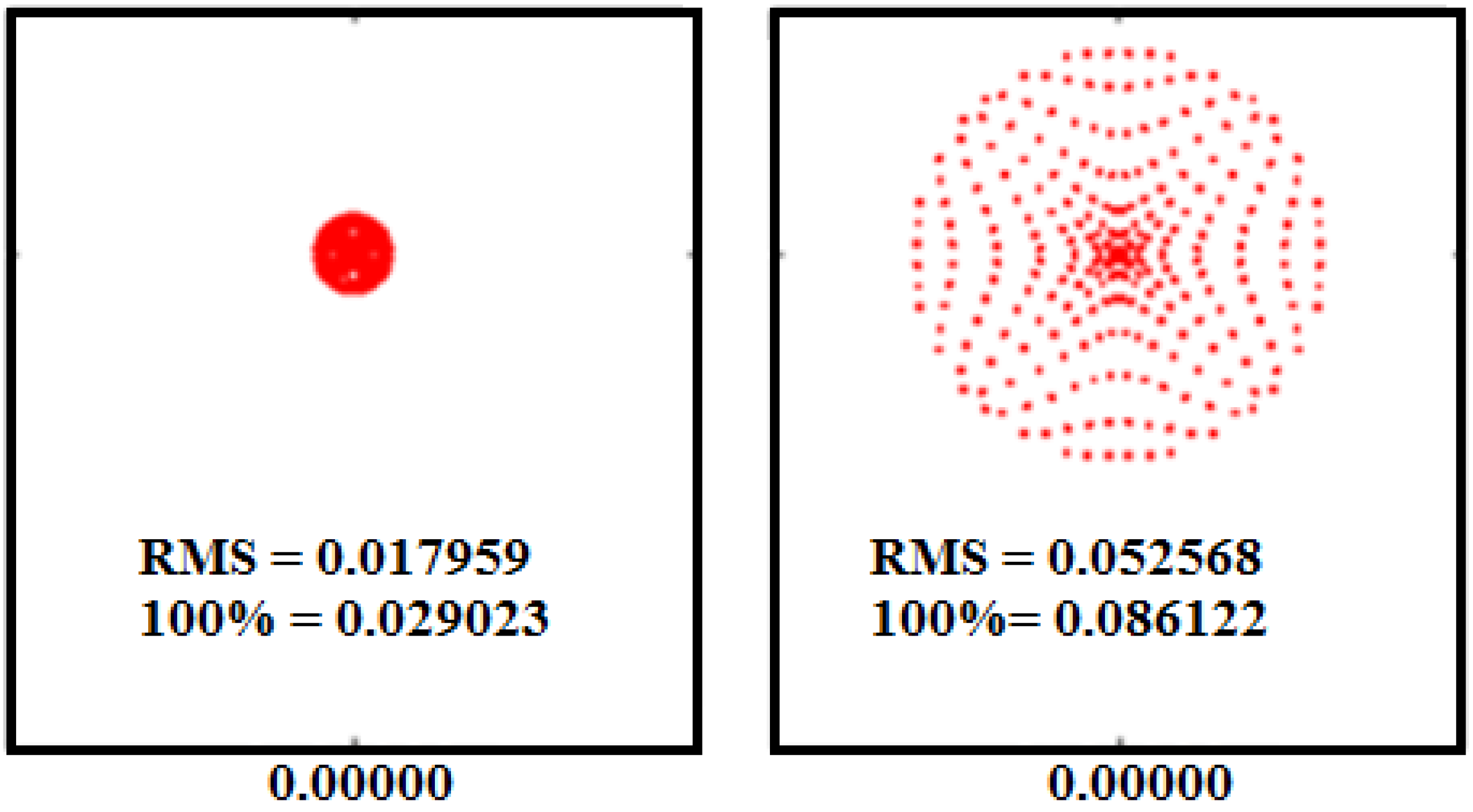
Figure 7. The FEA experiment results indicated that the dome temperature gradient was 44.15 °C and that the 2.79 °C isothermal surface of the rear system was 282.9 mm from the front of the cylindrical aircraft, and did not diffuse to the rear system. The large dome temperature gradient of 43.1 °C also affected the system performance. The tangent value of the angle formed by the emergent ray from the dome back surface that passes the incident ray aperture margin and the optical axis decreased from 0.00554 to 0.00367, and the spot diameter increased from 0.029 mm to 0.086 mm at 0° field of view, as shown in
Figure 8.
The experiment above proves the effectiveness of the new method. Based on the light spot size obtained from FEA and image quality analysis, the time required for the calculation decreased from 7 h to less than 1 s. Using the empirical equations, the relative error in light spot size was 9.2%. This method was thus found to be beneficial for rapid validation during the early stages of the design process. When approaching the target, the method could be replaced with the traditional method to ensure precise validation.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}