
Traffic Management for Emergency Vehicle Priority Based on Visual Sensing



Abstract
:1. Introduction
2. Related Work
3. Proposed Methodology
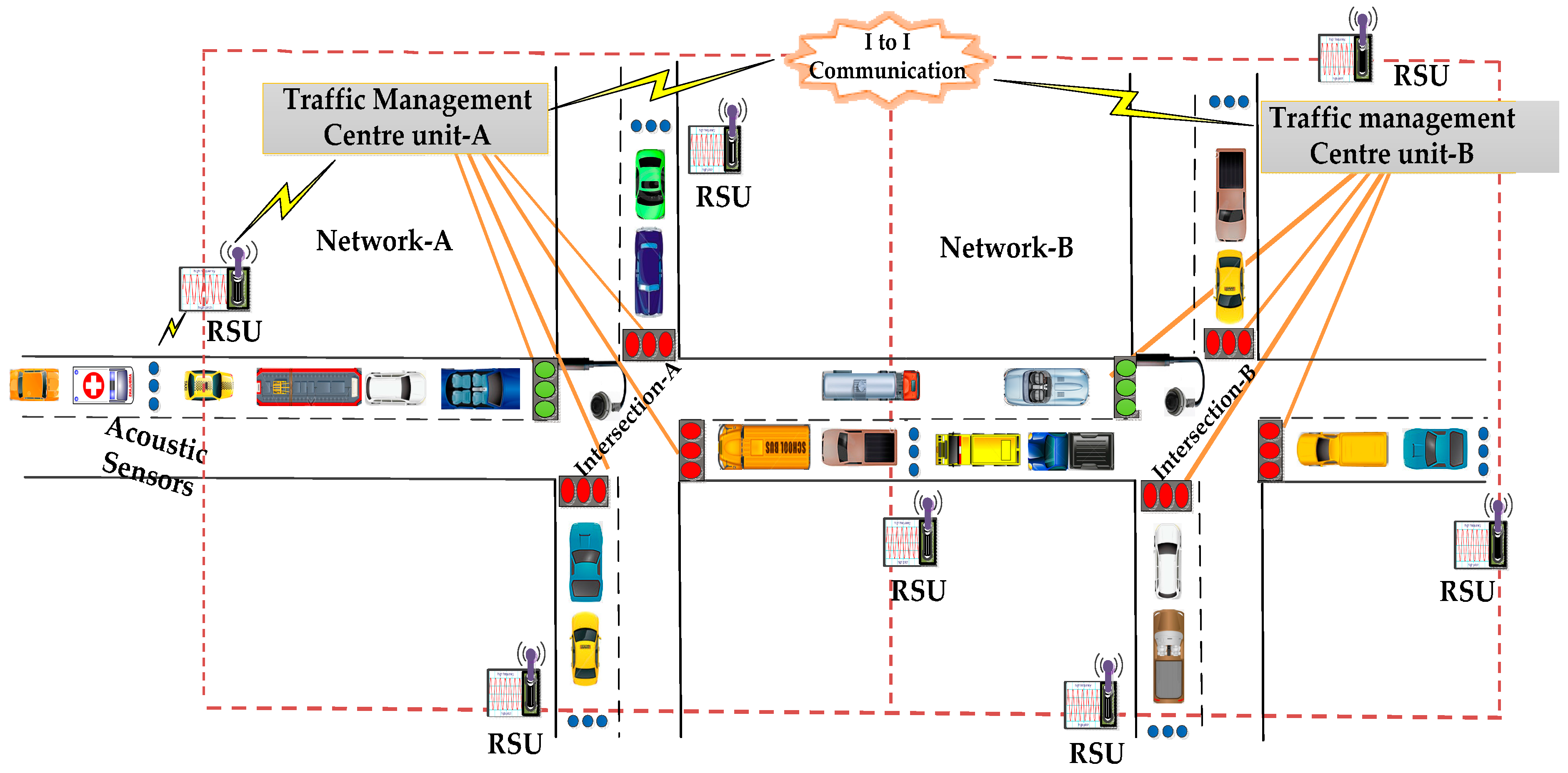
3.1. The Architecture of an Urban Traffic Management System (UTMS)
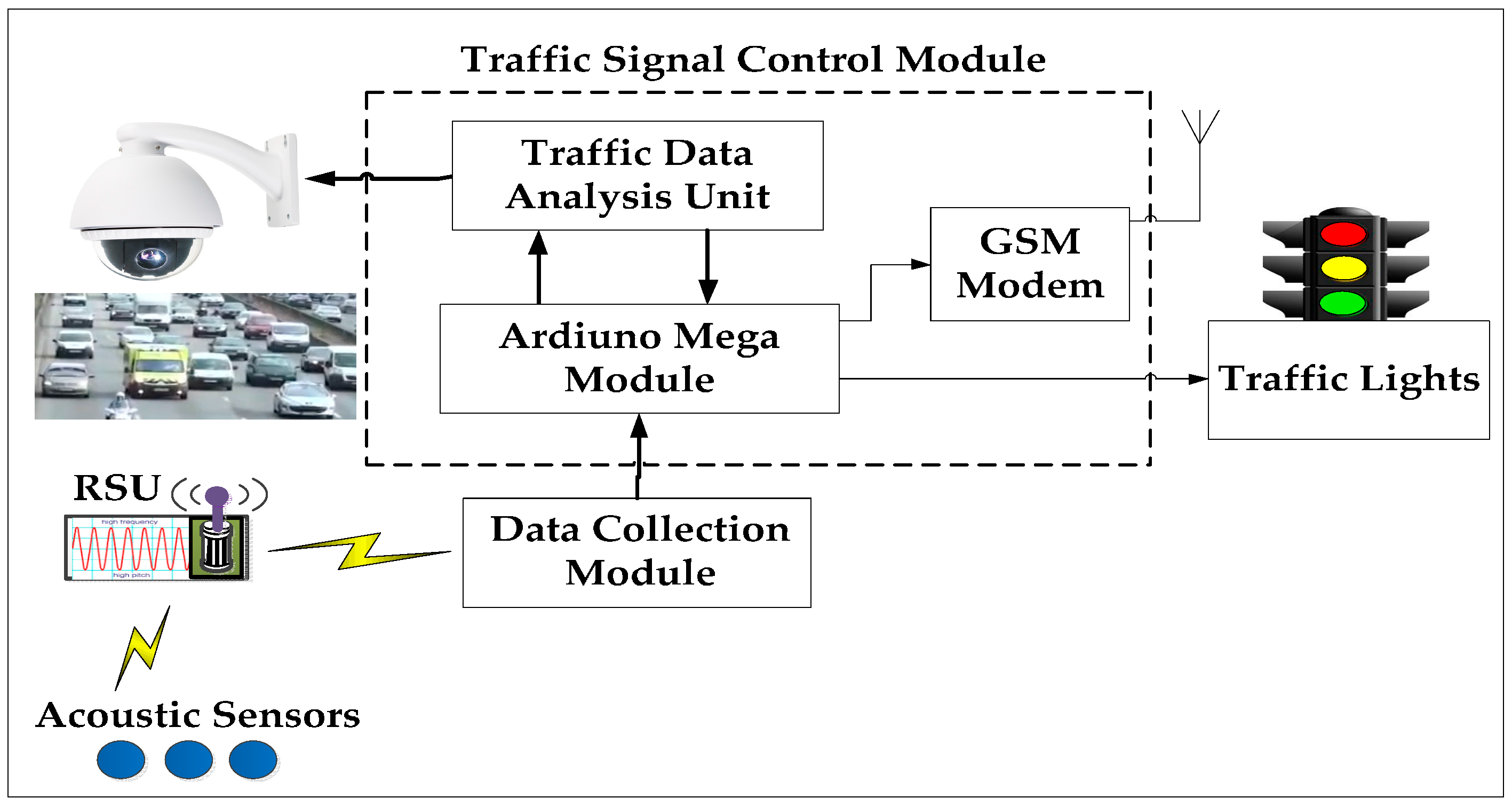
3.2. Traffic Management Center
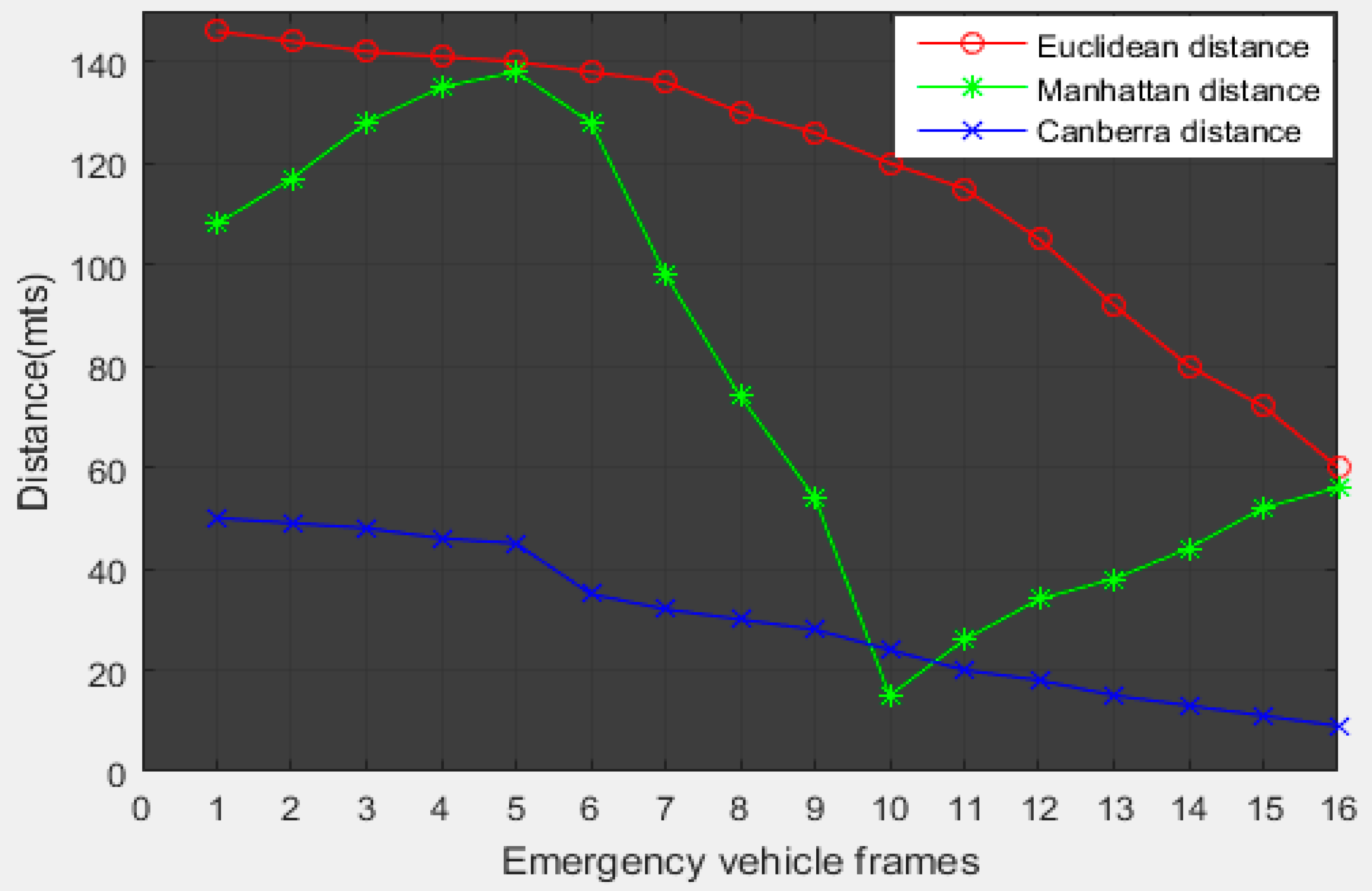
3.3. Distance Measurement Techniques
3.3.1. Euclidean Distance
3.3.2. Manhattan Distance
3.3.3. Canberra Distance
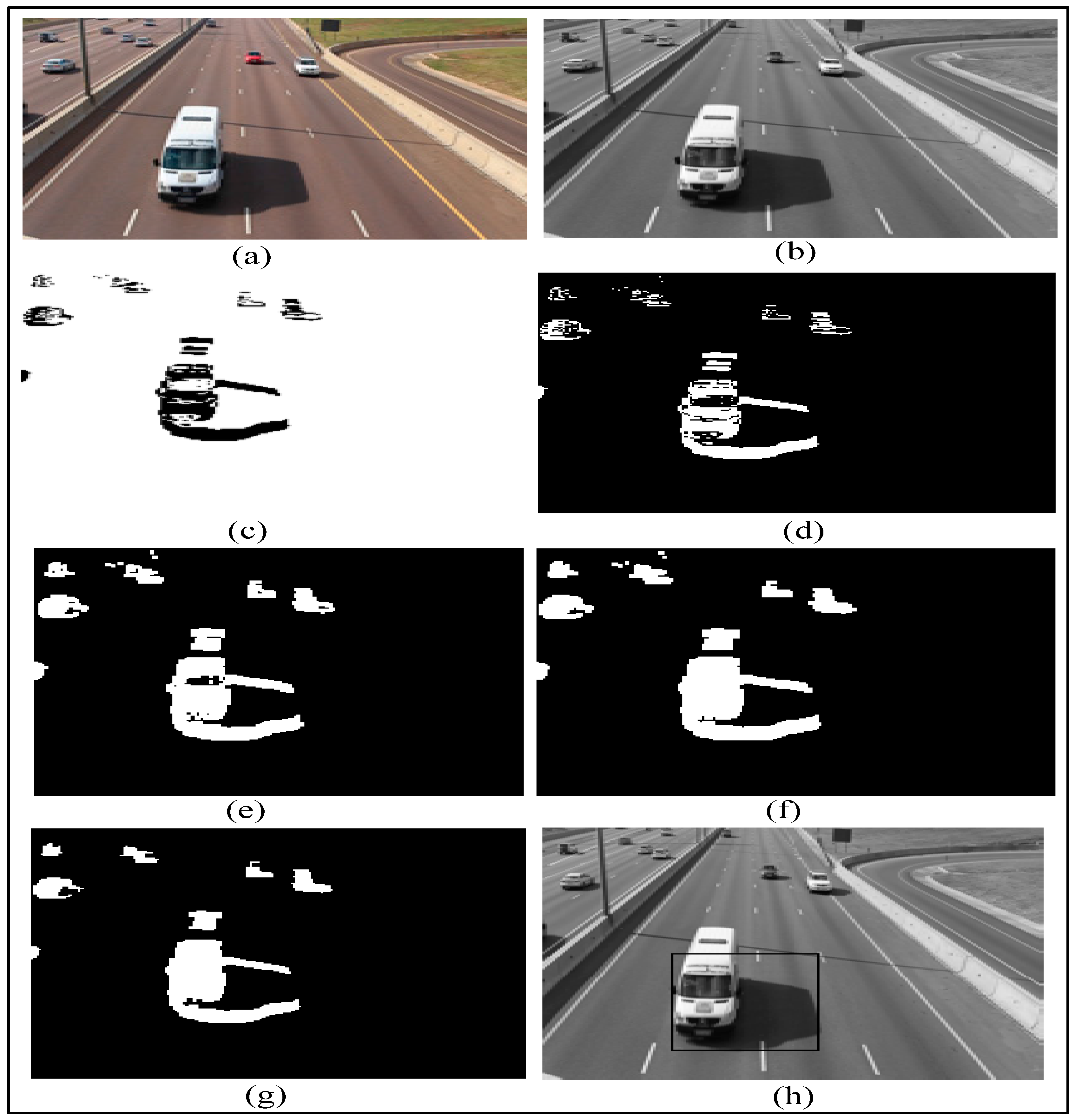
3.4. Vehicle Counting Method
- Grayscale conversion.
- Foreground extraction.
- Defining Region of Interest (ROI).
- Thresholding.
- Filling the holes.
- Morphological operations.
- Detect the vehicles entering the ROI.
- Count the vehicles.
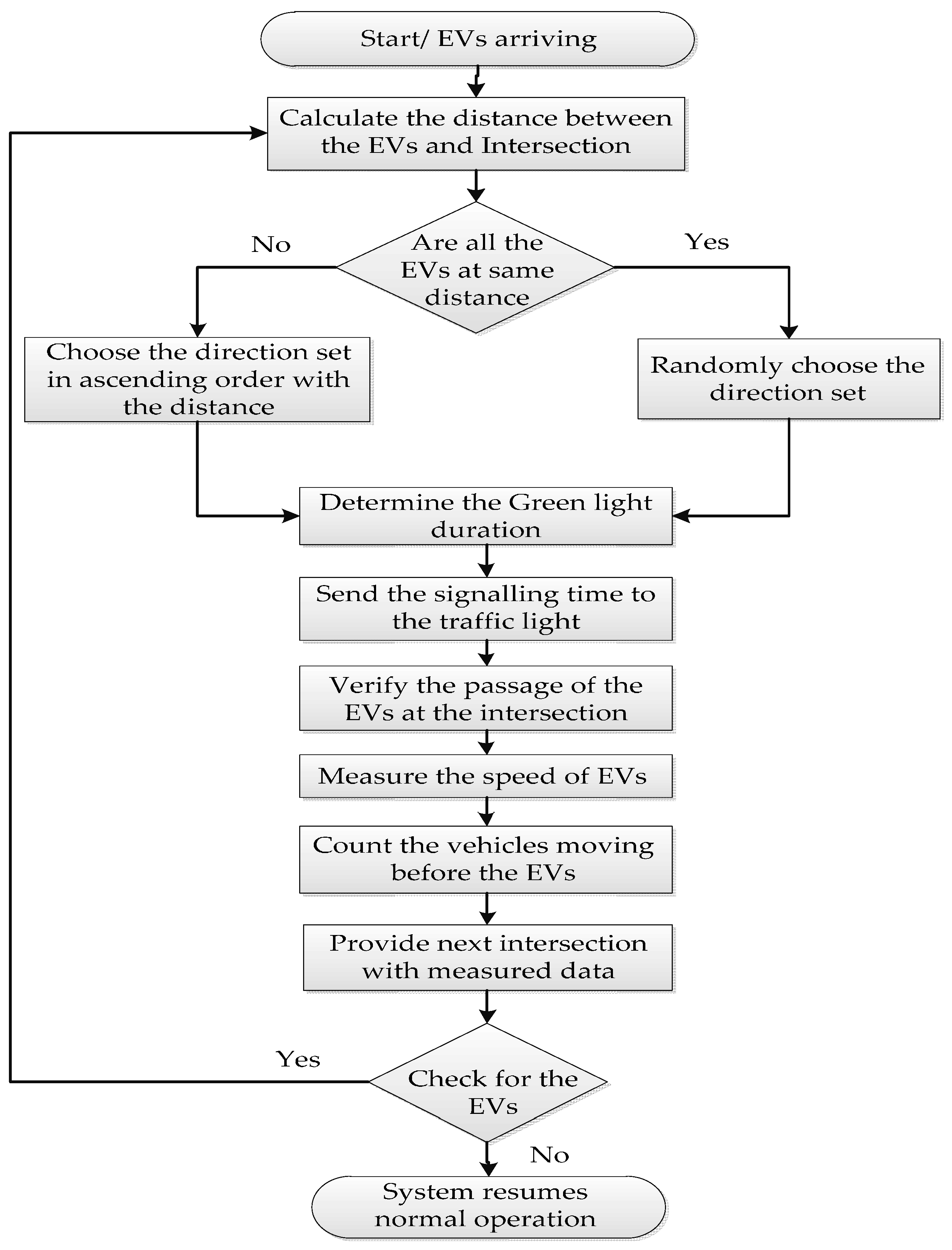
3.5. Distance Based Emergency Vehicle Dispatching Algorithm
- The sensor senses the presence of emergency vehicles. The emergency vehicles are ambulances, fire engines and police cars.
- Calculate the distance between the emergency vehicle and the intersection.
- The controller checks that the arriving emergency vehicles are at the same distance or not. If they are at the same distance, the controller randomly chooses the direction to set the green light. Else, he chooses the direction set in ascending order with the distance.
- Determine the green light duration based on the measured distance values and send these values to the traffic lights.
- Verify the passage of the emergency vehicle and measure the speed of the emergency vehicle and count the vehicles moving along with the emergency vehicle towards next intersection. The system sends the measured data to the next intersection.
- The controller checks for the presence of the emergency vehicle. If no vehicle, then it resumes normal operation. Else, it continues repeats from step 2 to step 6.
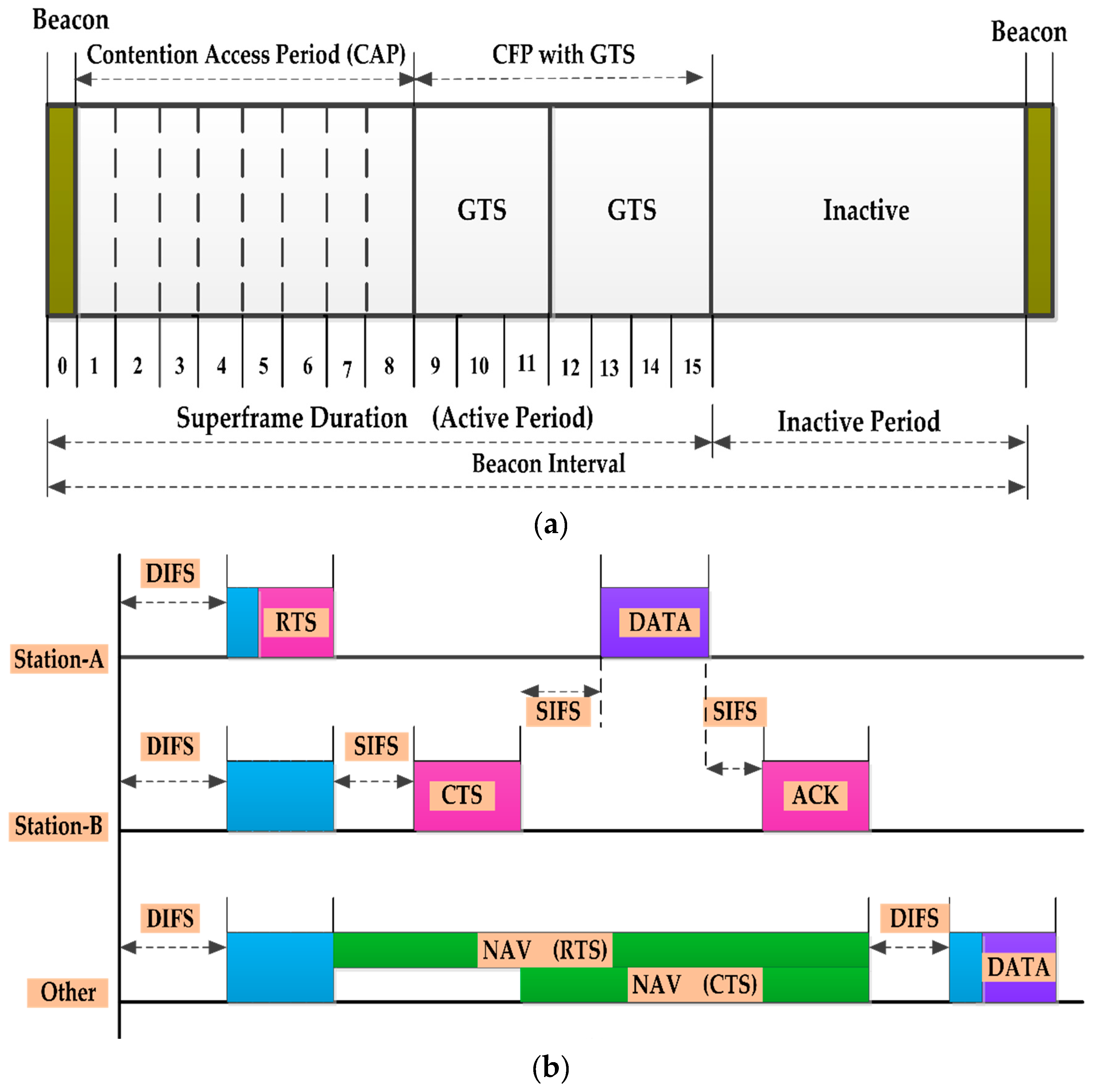
4. PE-MAC Protocol
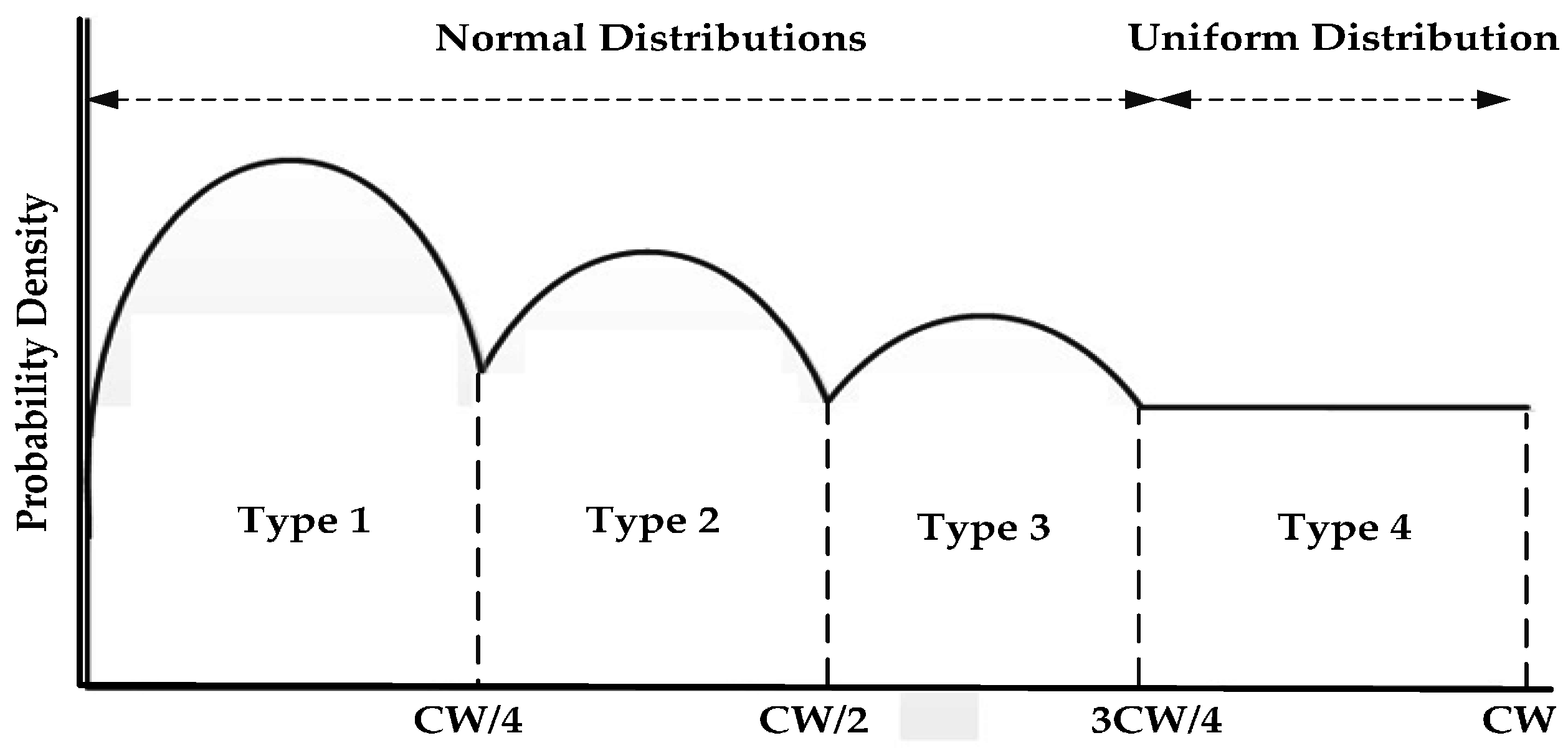
4.1. Priority for Emergency Traffic Based MAC (PE-MAC) Protocol
- : Mean of the Normal Distribution, initialized with
- : Variance of the Normal Distribution, such that . Note that we set a fixed value of to allow many values of the back-off to be chosen.
- Initialize all the variables.
- Compute the DThr and DK (Avg).
- Compare the DK (Avg) value with the DThr value. If the DK (Avg) ≤ DThr, then the mean value is assigned with the previous mean value and according to the type of messages, the contention window interval is divided. This is how a back-off value for the different messages is picked around the mean value.
- If DK (Avg) > DThr, the mean value is decremented so, that a smaller back-off value will be chosen in the successive iteration.
| Algorithm 1. Priority for Emergency Traffic based MAC (PE-MAC) |
| 1: , 2: Compute DThr and DK (Avg) 3: if (DK (Avg) DThr) then 4: 5: else 6: 7: if 8: 9: end if 10: end if 11: 12: 13: 14: This algorithm allows the emergency messages to be sent to the TMC within the required time and with less delay. |
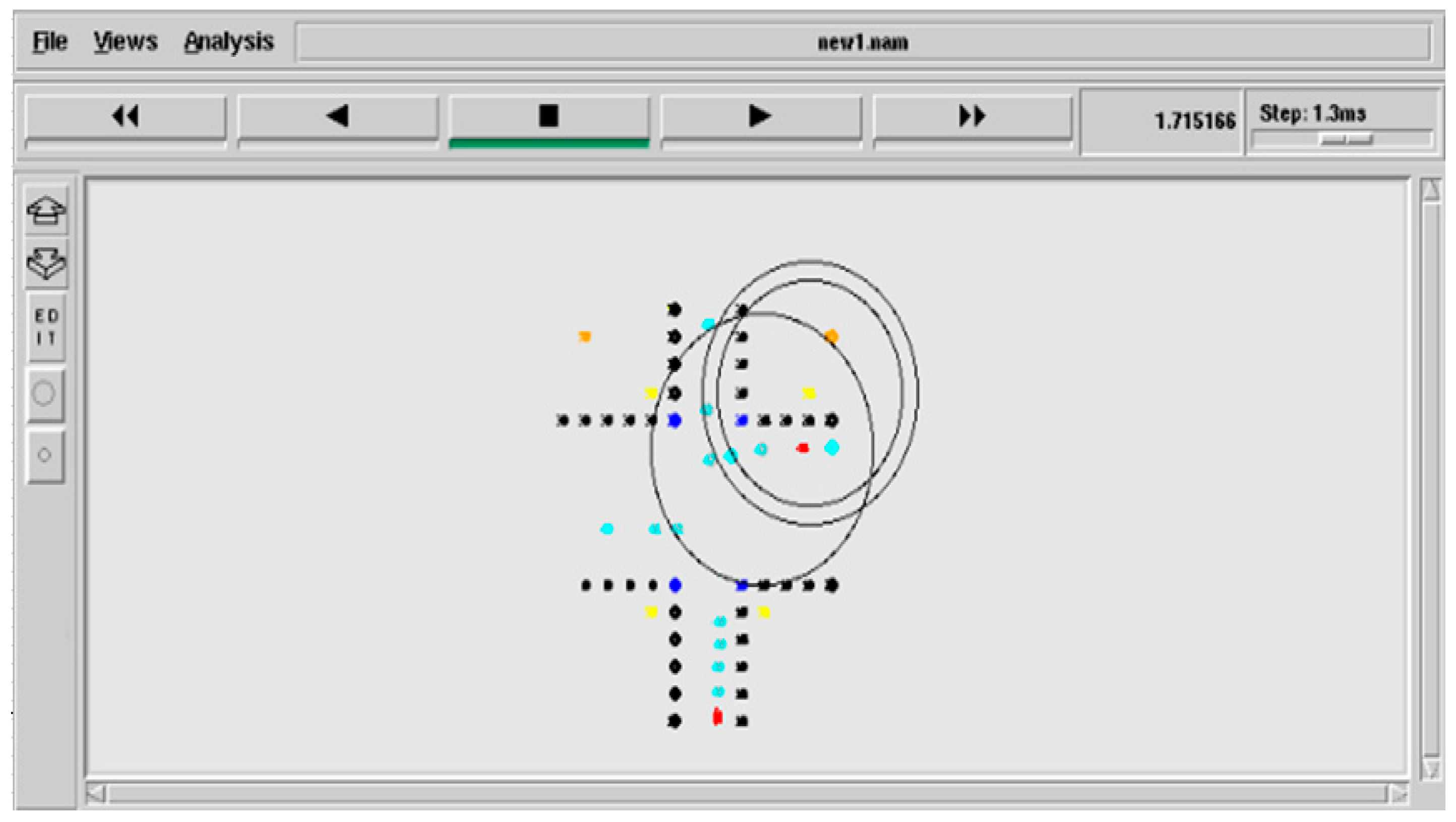
4.2. Simulation Environment
5. Results and Discussion
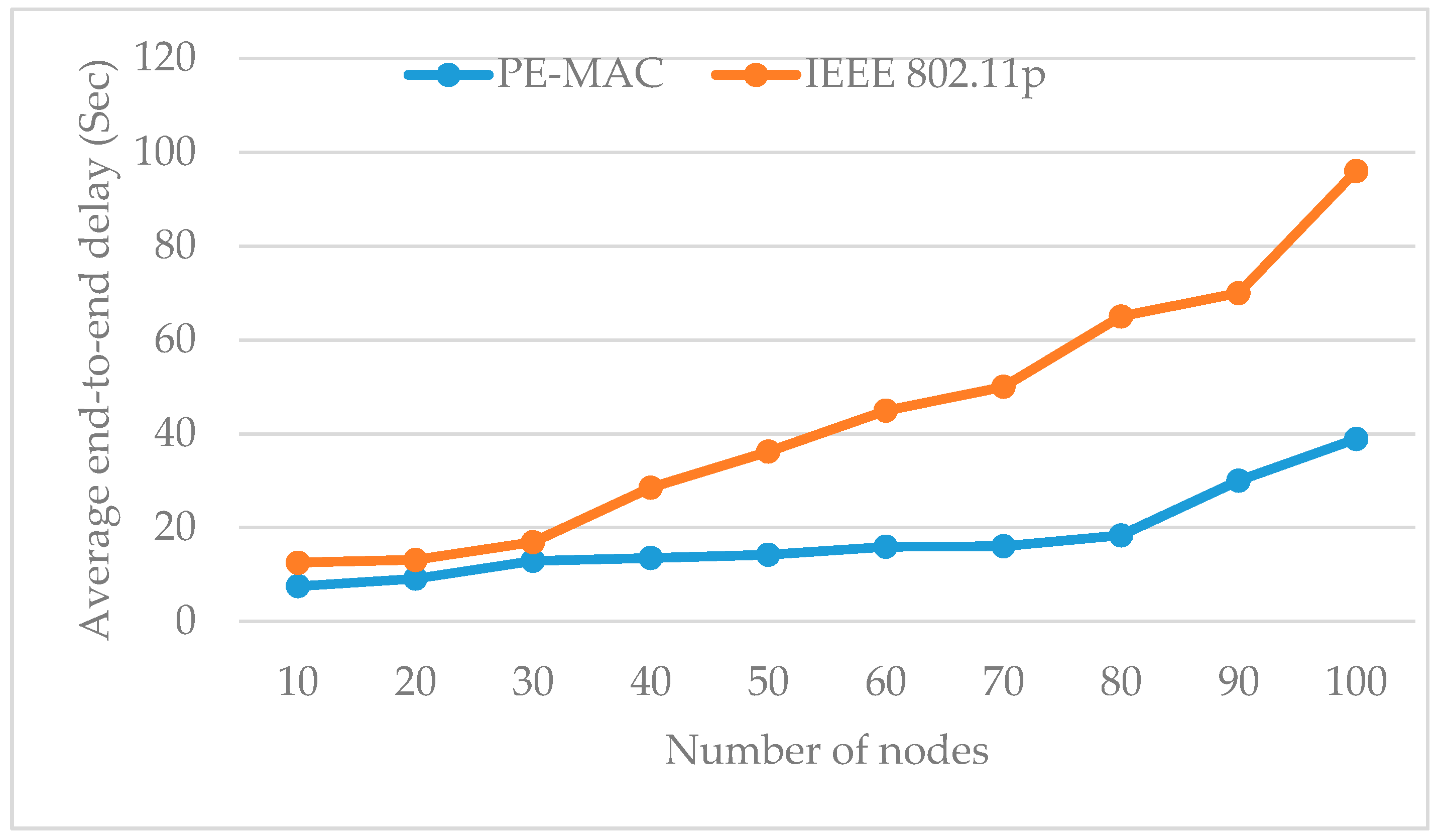
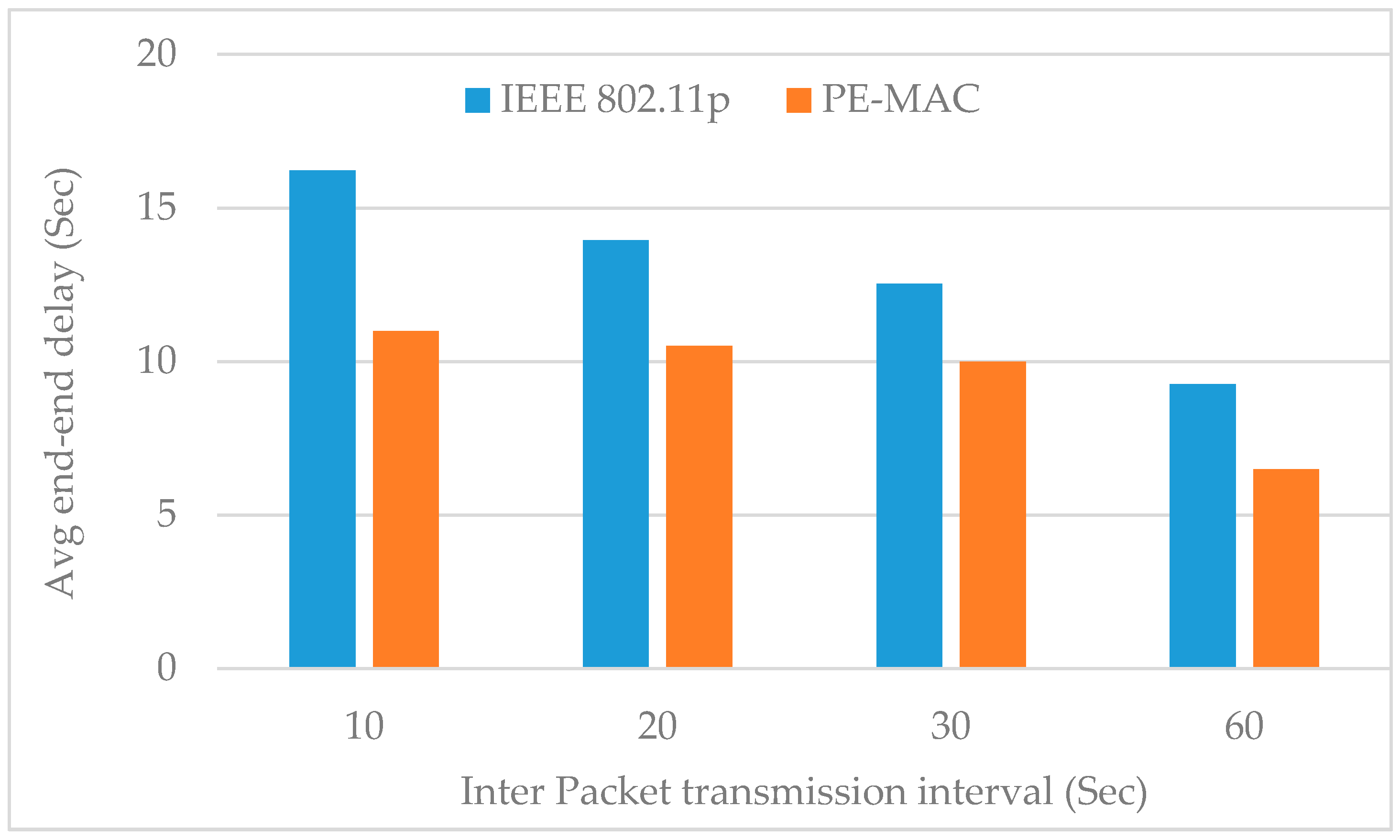
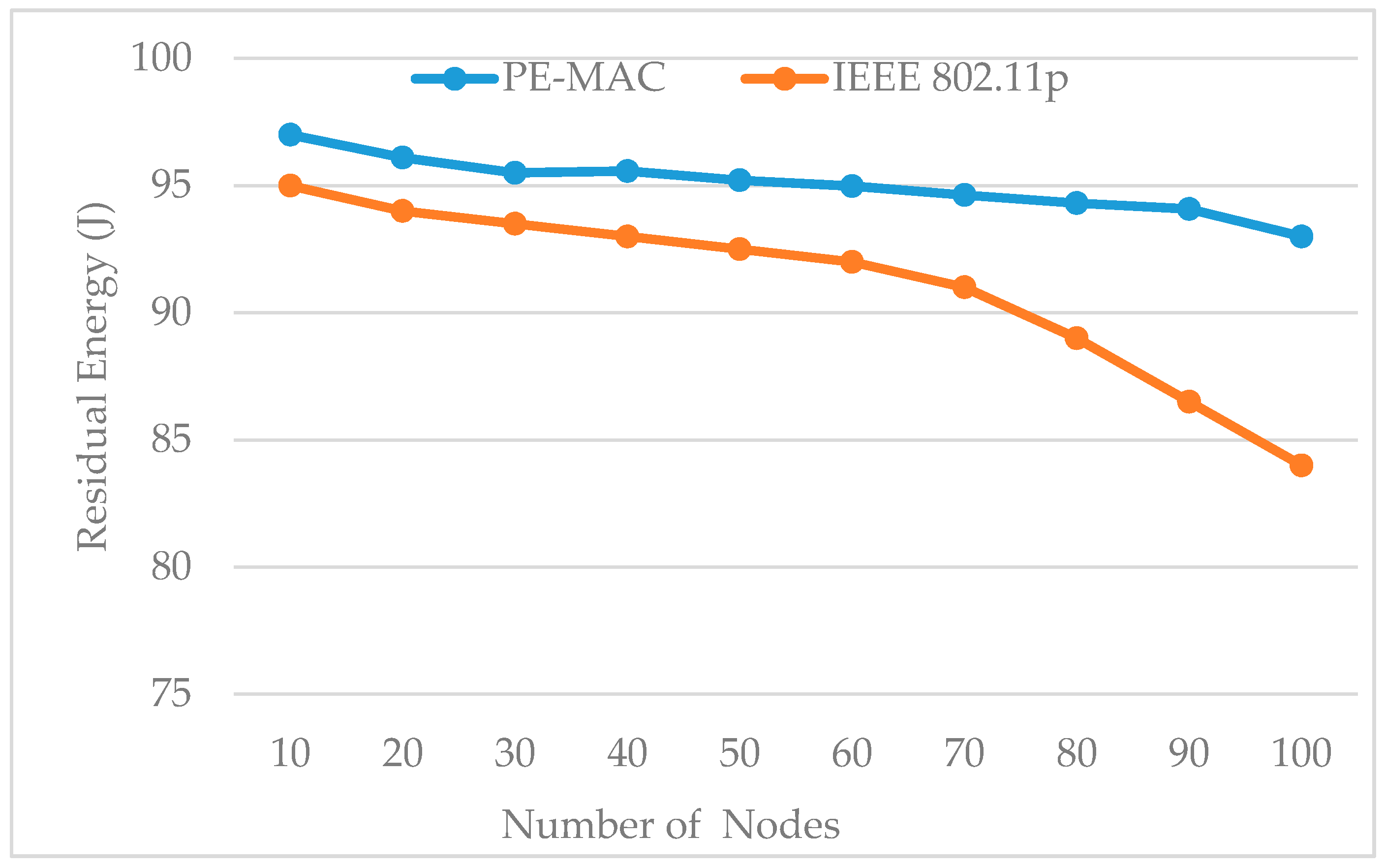
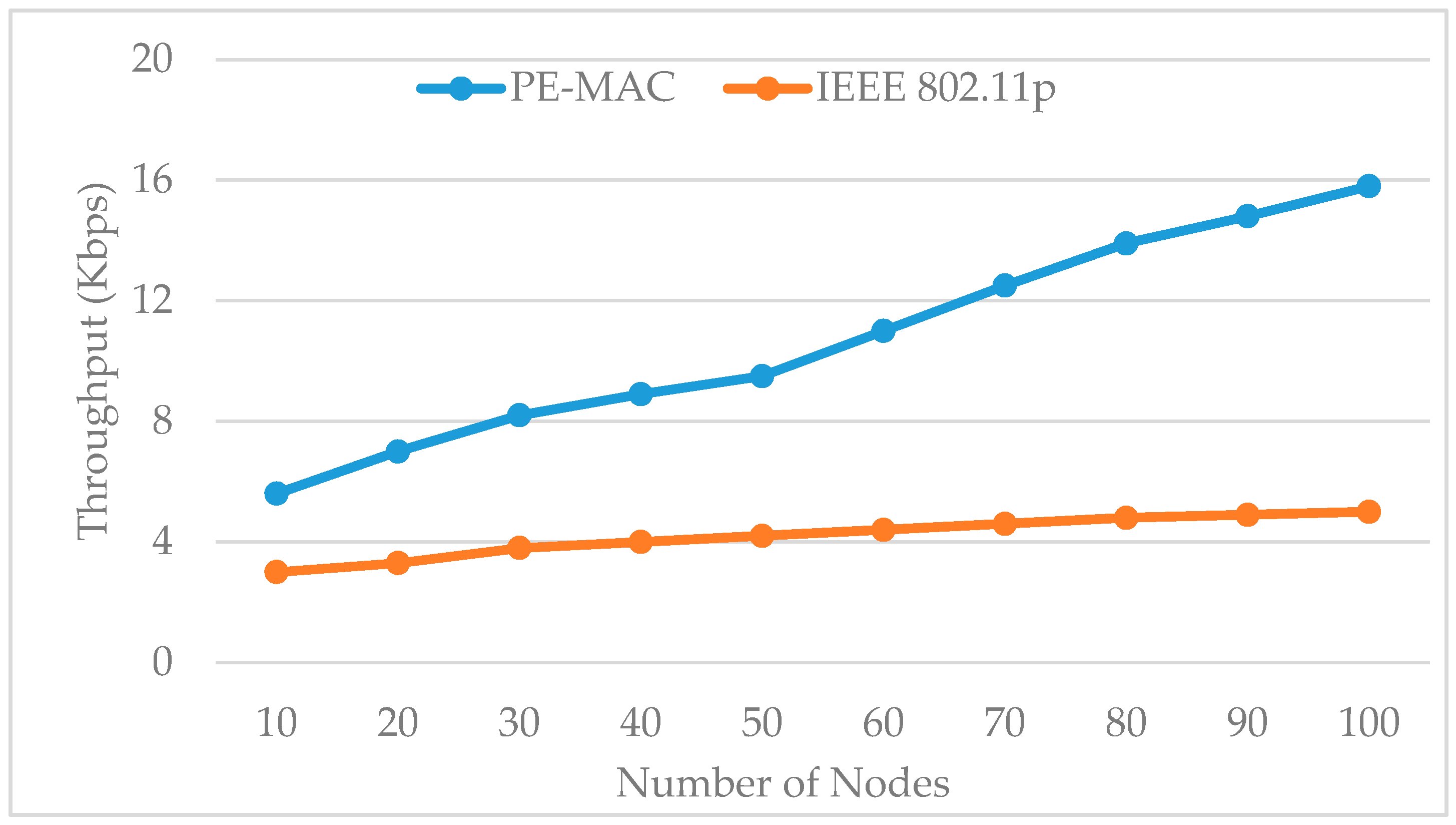
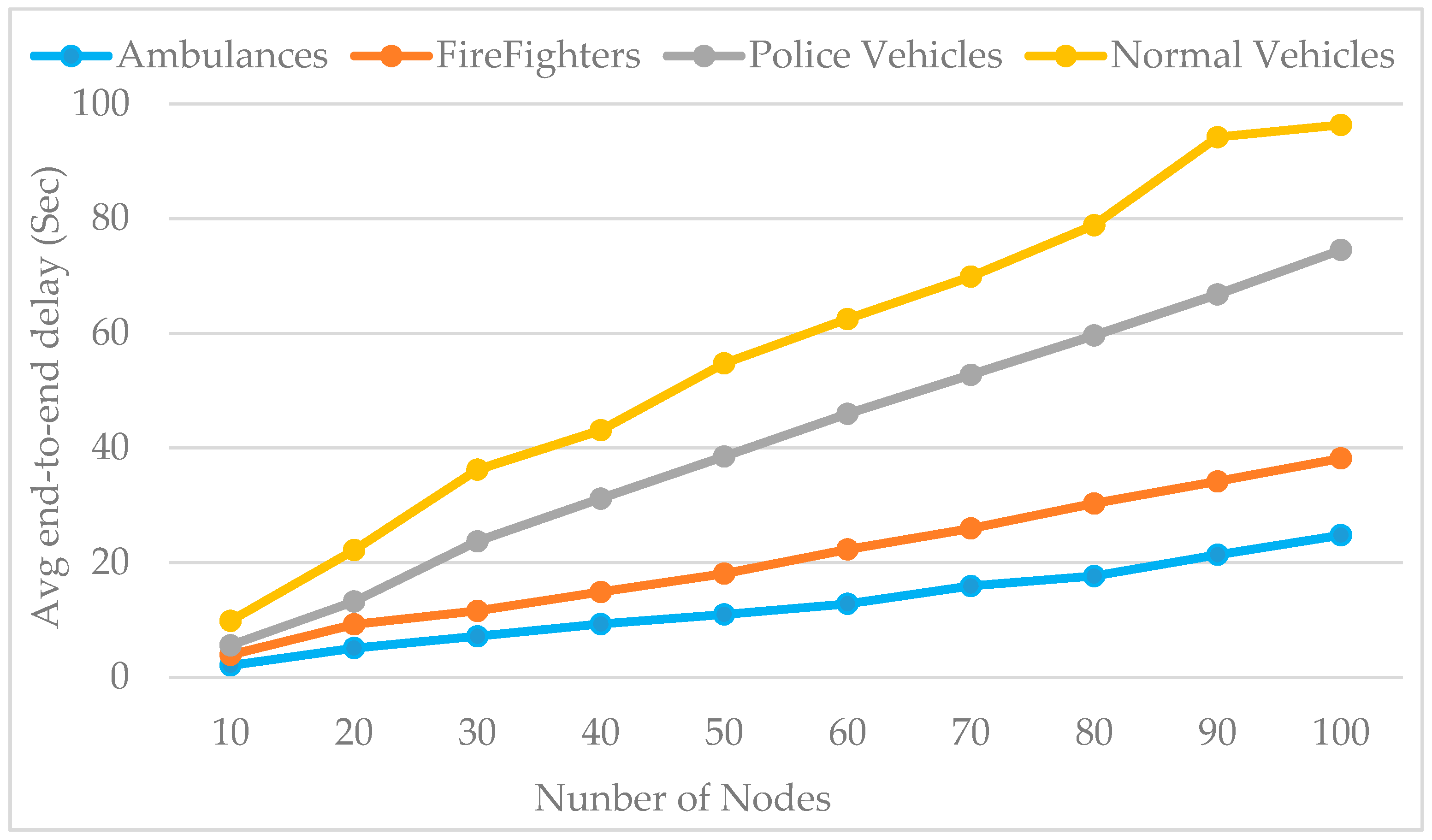
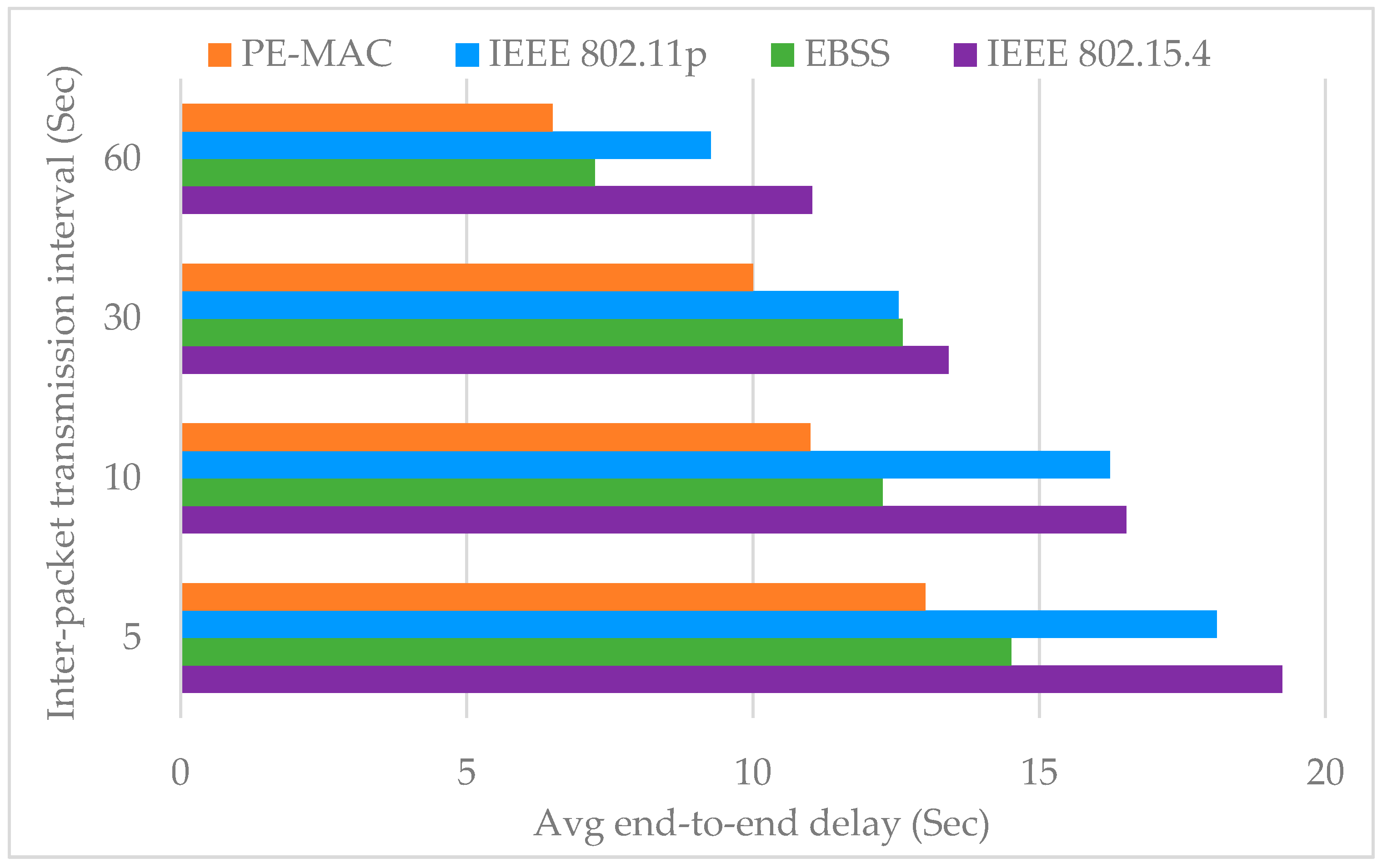
5.1. Performance of the PE-MAC and IEEE802.11p
5.2. Simulation Results of Vehicle Counting and Distance Measurement Techniques
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Djahel, S.; Smith, N.; Wang, S.; Murphy, J. Reducing emergency services response time in smart cities: An advanced adaptive and fuzzy approach. In Proceedings of the IEEE First International Smart Cities Conference (ISC2), Guadalajara, Mexico, 25–28 October 2015; pp. 1–8.
- National Highway Traffic Safety Administration (NHTSA) and the Economic and Social Impact of Motor Vehicle Crashes. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812013 (accessed on 14 December 2015).
- Statistics on Emergency Vehicle Accidents in the U.S. Available online: http://www.arnolditkin.com/Personal-Injury-Blog/2015/November/Statistics-on-Emergency-Vehicle-Accidents-in-the.aspx (accessed on 5 December 2015).
- Nellore, K.; Hancke, G.P. A survey on urban traffic management system using wireless sensor networks. Sensors 2016, 16, 157. [Google Scholar] [CrossRef] [PubMed]
- Rajeshwari, S.; Santhoshs, H.; Varaprasad, G. Implementing intelligent traffic control system for congestion control, ambulance clearance and stolen vehicle detection. IEEE Sens. J. 2015, 15, 1109–1113. [Google Scholar]
- Sireesha, E.; Rakesh, D. Intelligent traffic light system to prioritized emergency purpose vehicles based on wireless sensor network. Int. J. Res. Stud. Sci. Eng. Technol. 2014, 1, 24–27. [Google Scholar]
- Shruthi, K.R.; Vinodha, K. Priority based traffic lights controller using wireless sensor networks. Int. J. Electron. Signal Syst. 2012, 1, 58–61. [Google Scholar]
- Hussian, R.; Sandhy, S.; Vinita, S.; Sandhya, S. WSN applications: Automated intelligent traffic control system using sensors. Int. J. Soft Comput. Eng. 2013, 3, 77–81. [Google Scholar]
- Nabeel, M.M.; EI-Dien, M.F.; EI-Kader, S.A. Intelligent vehicle recognition based on wireless sensor network. Int. J. Comput. Sci. Issues 2013, 10, 164–174. [Google Scholar]
- Nellore, K.; Melingi, S.B. Automatic Traffic Monitoring System Using Lane Centre Edges. IOSR J. Eng. 2012, 2, 1–8. [Google Scholar]
- Uddin, S.M.; Das, K.A.; Taleb, A.M. Real-time area based traffic density estimation by image processing for traffic signal control: Bangladesh perspective. In Proceedings of the IEEE International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Dhaka, Bangladesh, 21–23 May 2015; pp. 1–5.
- Traffic Signal Preemption for Emergency Vehicles. Available online: http://ntl.bts.gov/lib/jpodocs/repts_te/14097_files/14097.pdf (accessed on 5 December 2015).
- Farheena, S.; Chandak, B.M. An approach towards traffic management system using density calculation and emergency vehicle alert. IOSR J. Comput. Sci. 2014, 4, 24–27. [Google Scholar]
- Bharadwaj, R.; Deepak, J.; Baranitharam, M.; Vaidehi, V.V. Efficient dynamic traffic control system using wireless sensor networks. In Proceedings of the IEEE International Conference on Recent Trends in Information Technology (ICRTIT), Chennai, India, 25–27 July 2013; pp. 668–673.
- Mithun, C.N.; Rashid, U.N.; Rahman, M.M.S. Detection and classification of vehicles from video using multiple Time-Spatial images. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1215–1225. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, M.D.; Netanyahu, S.N.; Piatko, D.C.; Silverman, R.; Wu, Y.A. An efficient K-means clustering algorithm: analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Rahaman, O.Md.; Hong, S.C.; Lee, S.; Bang, C.Y. ATLAS: A traffic load aware sensor MCA design for Collaborative body area sensor networks. Sensors 2011, 11, 11560–11580. [Google Scholar] [CrossRef] [PubMed]
- Abubakr, S.E.; Halla, O.A.; Tahani, A.A. A GPS based traffic light pre-emption control system for emergency vehicles. In Proceedings of the IEEE International conference on Computing, Electrical and Electronics Engineering, Khartoum, Sudan, 26–28 August 2013; pp. 724–729.
- Nellore, K.; Palepu, V.S.; Palepu, M.R.D.; Chenchela, V.K. Improving the lifespan of wireless sensor network via efficient carrier sensing scheme-CSMA/SDF. Int. J. Eng. Sci. Res. Technol. 2016, 5, 723–732. [Google Scholar]
- Abu-Mahfouz, A.M.; Hancke, G.P. ns-2 Extension to Simulate Localization Systems in Wireless Sensor Networks. In Proceedings of IEEE Africon 2011, Livingstone, Zambia, 13–15 September 2011; pp. 1–7.
- Silva, B.; Hancke, G.P. IR-UWB based Non-line-of-sight Identification in Harsh Environments: Principles and Challenges. IEEE Trans. Ind. Inform. 2016, 12, 1188–1195. [Google Scholar] [CrossRef]
- Adnan, M.A.; Hancke, G.P. An Efficient Distributed Localization Algorithm for Wireless Sensor Networks: Based on Smart References Selection Criteria. Int. J. Sens. Netw. 2013, 13, 94–111. [Google Scholar]
- Fan, K.; Chen, J.; Cao, Q. Design and research on traffic of wireless sensor network based on LabVIEW. In Proceedings of the 2nd International Symposium on Computer, Communication, Control and Automation (3CA 2013), Singapore, 1–2 December 2013; pp. 6–9.
- AI-Ostath, N.; Selityn, F.; AI-Roudhan, Z.; EI-Abd, M. Implementation of an emergency vehicle to traffic lights communication system. In Proceedings of the 7th International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 27–29 July 2015; pp. 1–5.
- Koonce, P.; Lee, R.; Kevin, L.; Shaun, Q.; Scott, B.; Cade, B.; Jim, B.; Phil, T.; Tom, U. Signal Timing Manual. Available online: http://nacto.org/docs/usdg/signal_timing_manual_fhwa.pdf (accessed on 26 March 2016).
- Chinnappen-Rimer, S.; Hancke, G.P. Actor coordination using info-gap decision theory in wireless sensor and actor networks. Int. J. Sens. Netw. 2011, 10, 177–191. [Google Scholar] [CrossRef]
- Mittal, K.A.; Bhandari, D. A novel approach to implement green wave system and detection of stolen Vehicles. In Proceedings of the 2013 IEEE 3rd International Advance Computing Conference (IACC), Ghaziabad, India, 22–23 February 2013; pp. 1055–1059.
- Varaprasad, G. High stable power aware multicast algorithm for mobile ad hoc networks. IEEE Sens. J. 2013, 1, 1442–1446. [Google Scholar] [CrossRef]
- Boris, S.K. The physics of green-wave breakdown in a city. Europhys. Lett. 2013, 102, 28010. [Google Scholar]
- Sundar, R.; Hebbar, S.; Golla, V. Implementing intelligent traffic control system for congestion control, Ambulance clearance, and Stolen vehicle detection. IEEE Sens. J. 2015, 15, 1109–1113. [Google Scholar]
- Hegde, R.; Sail, R.R.; Indira, S.M. RFID and GPS based automatic lane clearance system for ambulance. Int. J. Adv. Elect. Electron. Eng. 2013, 2, 102–107. [Google Scholar]
- Jayaraj, V.; Hemanth, C. Emergency vehicle signaling using VANETS. In Proceedings of the IEEE 17th International Conference on High Performance Computing and Communications (HPCC), 2015 IEEE 7th International Symposium on Cyberspace safety and Security (CSS), and 2015 IEEE 12th International Conference on Embedded Software and Systems (ICESS), New York, NY, USA, 24–26 August 2015; pp. 734–739.
- Chenchela, V.K.; Palepu, V.S.; Nellore, K.; Palepu, M.R.D. Improving the quality of Service (QOS) of Connection Admission control Mechanism(CAC) using two dimensional queuing model. IOSR J. Electr. Electron. Eng. 2016, 11, 17–27. [Google Scholar]
- Collotta, M.; Bello, L.L.; Pau, G. A novel approach for dynamic traffic lights management based on wireless sensor networks and multiple fuzzy logic controllers. Expert Syst. Appl. 2015, 42, 5403–5415. [Google Scholar] [CrossRef]
- Hancke, P.G.; De Silva, B.; Hancke, G.P. The Role of Advanced Sensing in Smart Cities. Sensors 2013, 13, 393–425. [Google Scholar] [CrossRef] [PubMed]
- Potter, C.; Hancke, G.P.; de Silva, B. Machine-to-Machine: Possible Applications in Industrial Networks. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 1321–1326.
- Kruger, P.C.; Hancke, G.P. Benchmarking Internet of things devices. In Proceedings of the IEEE International Conference on Industrial Informatics, Porto Alegre, Brazil, 27–30 July 2014; pp. 611–616.
- Kruger, P.C.; Hancke, G.P. Implementing the Internet of Things vision in industrial wireless sensor networks. In Proceedings of the IEEE International Conference on Industrial Informatics, Porto Alegre, Brazil, 27–30 July 2014; pp. 627–632.
- Chiwewe, T.; Mbuya, C.; Hancke, G.P. Using Cognitive Radio for Interference-Resistant Industrial Wireless Networks: An Overview. IEEE Trans. Ind. Inf. 2015, 11, 1466–1481. [Google Scholar]
- Kumar, A.; Hancke, G.P. An Energy-Efficient Smart Comfort Sensing System Based on the IEEE 1451 Standard for Green Buildings. IEEE Sens. J. 2014, 14, 4245–4252. [Google Scholar] [CrossRef]
- Cheng, B.; Cui, L.; Jia, W.; Zhao, W.; Hancke, G.P. Multiple Regions of Interest Coverage in Camera Sensor Networks for Tele-Intensive Care Units. IEEE Trans. Ind. Inf. 2016. [Google Scholar] [CrossRef]
- Rohini Priya, P.; Anju Joy, J.; Sumathy, G. Traffic light pre-emption control system for emergency vehicles. SSRG Int. J. Electron. Commun. Eng. 2015, 2, 21–25. [Google Scholar]
- Dobre, A.R.; Nita, A.V.; Ciobanu, A.; Negrescu, C.; Stanomir, D. Low computational methods for siren detection. In Proceedings of the IEEE 21st International Symposium for Design and Technology in Electronic packaging (SIITME), Brasov, Romania, 22–25 October 2015; pp. 291–295.
- Miyazaki, T.; Kitazono, Y.; Shimakawa, M. Ambulance siren detection using FFT and dsPIC. In Proceedings of the First IEEE/IIAE International Conference on Intelligent System and Image processing, Kitakyushu, Japan, 26–27 September 2013; pp. 266–269.
- Meucci, F.; Pierucci, L.; del Re, E.; Lastrucci, L.; Desii, P. Areal-time siren detection to improve safety of guide in traffic environment. In Proceedings of the IEEE 16th International Conference on European Signal Processing, Lausanne, Switzerland, 25–29 August 2008; pp. 1–5.
- Eisenson, H.; Ross, J.M. Device and System to Alert Vehicles and Pedestrians of Approaching Emergency Vehicles and Emergency Situations, United Sates Patent Application Publications. Available online: https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/US20130049985.pdf (accessed on 20 February 2015).
- Fazenda, B.; Atmoko, H.; Gu, F.; Guan, L.; Ball, A. Acoustic based safety emergency vehicle detection for intelligent transport systems. In Proceedings of the IEEE International Conference ICROS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 4250–4255.
- David, A.; Stefan, L.; Marc, F.; Dieter, K. Emergency Vehicle Detection with Digital Image Sensor. Available online: https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/US20150161458.pdf (accessed on 20 February 2015).
- Malkauthekar, D.M. Analysis of Euclidean distance and Manhattan distance measure in Face recognition. In Proceedings of the IET 3rd International Conference on Computational Intelligence and Information Technology (CIIT), Herts, UK, 18–19 October 2013; pp. 503–507.
- Srimani, K.P.; Mahesh, S.; Bhyratae, A.S. Improvement of Traditional K-means algorithm through the regulation of distance metric parameters. In Proceedings of the IEEE 7th International Conference on Intelligent System and Control (ISCO), Coimbatore, India, 4–5 January 2013; pp. 393–398.
- Horiya, I.B.; Soufiene, D.; John, M. Improving emergency messages transmission delay in road monitoring based WSNs. In Proceedings of the IEEE Joint IFIP Wireless and Mobile Networking Conference (WMNC), Dubai, United Arab Emirates, 23–25 April 2013; pp. 1–8.
- Wantanee, V.; Ozan, K.T. Priority Management of Emergency Vehicles at Intersections Using Self Organized Traffic Control. In Proceedings of the IEEE Conference on Vehicular Technology (VTC Fall), Quebec, QC, Canada, 3–6 September 2012; pp. 1–4.
- Chen, C.Y.; Chen, P.Y.; Chen, W.T. A Novel Emergency Vehicle Dispatching System. In Proceedings of the IEEE 77th Conference on Vehicular Technology, Dresden, Germany, 2–5 June 2013; pp. 1–5.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Proposed Approach | Outcome | Comments |
|---|---|---|---|
| [42] | Design and implementation of acoustic sensor-based automatic traffic control system. | Detects the emergency vehicle by their siren sounds. | The traffic light sequence is interrupted with the approaching emergency vehicle and thereby its waiting time at the intersection is reduced. |
| [43] | Low computational microcontroller-based siren sound detection system. | Designed a siren sound detection system with low processing power. | The proposed method outperforms the existing siren detection methods in terms of processing power and cost. |
| [44] | Detection of siren sounds using Fast Fourier Transform (FFT) | Detects the siren sound in 0 dB (S/N ratio). Detects the siren sound using the Doppler effect. | This work only detects the ambulance siren sound and neither alerts the traffic nor changes the traffic signals. |
| [45] | Detection of siren sounds based on a pitch detection algorithm. | Capable of detecting the emergency vehicle in the presence of pitched and non-pitched noise. | The proposed algorithm outperforms the complex pattern recognition algorithms. The siren signal miss rate of the algorithm is very low. |
| [46] | Emergency vehicle’s siren and flashing light detection based on acoustic and optical sensors. | Cost effective solution. Distinct emergency vehicles are detected. | The proposed system alert‘s the drivers of normal vehicles and pedestrians about the approaching emergency vehicle. |
| [47] | Cross microphone array-based emergency vehicle detection. | Determines the incoming direction of siren sound. | The proposed system for source detection outperforms the existing sound intensity techniques. It delivers precise warning data to the driver. |
| [48] | Digital image sensor-based emergency vehicle detection and display system for a vehicle. | Analyses and detects the emergency vehicle in an image using image processing techniques. | The proposed work alerts the driver when an emergency vehicle is detected. It is not cost effective as it needs the cameras to be mounted on the vehicle. |
| Data Type, Index | Priority Assigned | Back-off Values | Medium Access Requirement |
|---|---|---|---|
| Ambulance data, 1 | First priority (Highest) | BOFF1 | Fast |
| Firefighter data, 2 | Second priority | BOFF2 > BOFF1 | Fast |
| Police car data, 3 | Third priority | BOFF3 > BOFF2 | Fast |
| Normal vehicle data, 4 | Fourth priority (least) | BOFF4 > BOFF3 | Fast or slow |
| Parameter | Value |
|---|---|
| Network Area | 1500 m × 1500 m |
| Propagation model | Propagation/Two Ray ground |
| Network interface type | Physical/wirelessphy |
| Interface queue | Queue/Droptail/Priqueue |
| Channel type | Channel/Wireless channel |
| Antenna | Antenna/OmniAntenna |
| Visualization tool | NAM, Tracing |
| Routing protocol | DSR |
| MCA layer | IEEE 802.11p |
| Transmission rate | 9.6 Kbps |
| Traffic type | CBN |
| Radio delay | 10 m |
| Link layer type | LL |
| Packet size | 512 bytes |
| IFQ length | 50 |
| Initial energy | 100 J |
| No.of nodes | 5 to 100 |
| Speed | 5, 10, 15 and 25 m/s |
| Distance Measurement Techniques | Distance Measurement at Discrete Points (All Distances Are in Meters) | Accuracy | Outcome | ||
|---|---|---|---|---|---|
| P1 | P2 | P3 | |||
| True Value: 142 | True Value :121 | True Value: 62 | |||
| Euclidean Distance | 140.03 | 120.25 | 60.66 | 98.60% | The simulation values are always very nearer to true values. |
| Manhattan Distance | 138 | 54.03 | 56.45 | 77.61% | Only at some points, the simulation values are nearer to true values. |
| Canberra Distance | 45.66 | 28 | 19.25 | 28.78% | The simulation values are always distant from the true values. |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nellore, K.; Hancke, G.P. Traffic Management for Emergency Vehicle Priority Based on Visual Sensing. Sensors 2016, 16, 1892. https://doi.org/10.3390/s16111892
Nellore K, Hancke GP. Traffic Management for Emergency Vehicle Priority Based on Visual Sensing. Sensors. 2016; 16(11):1892. https://doi.org/10.3390/s16111892
Chicago/Turabian StyleNellore, Kapileswar, and Gerhard P. Hancke. 2016. "Traffic Management for Emergency Vehicle Priority Based on Visual Sensing" Sensors 16, no. 11: 1892. https://doi.org/10.3390/s16111892
APA StyleNellore, K., & Hancke, G. P. (2016). Traffic Management for Emergency Vehicle Priority Based on Visual Sensing. Sensors, 16(11), 1892. https://doi.org/10.3390/s16111892