
Performance Evaluation of Proximal Sensors for Soil Assessment in Smallholder Farms in Embu County, Kenya

 , ,
, ,
Abstract
:1. Background
1.1. Soil Testing Is Important
1.2. Continental Digital Soil Maps
1.3. Proximal Soil Sensing
1.4. Overall Goal and Specific Research Questions
- For which lab-analyzed soil properties could functional, robust, and accurate sensor-based prediction models be calibrated?
- How should validation be designed, if one wants to identify spatially robust models?
- How is the variation in soil properties within and between sites translated to management advice given to farmers?
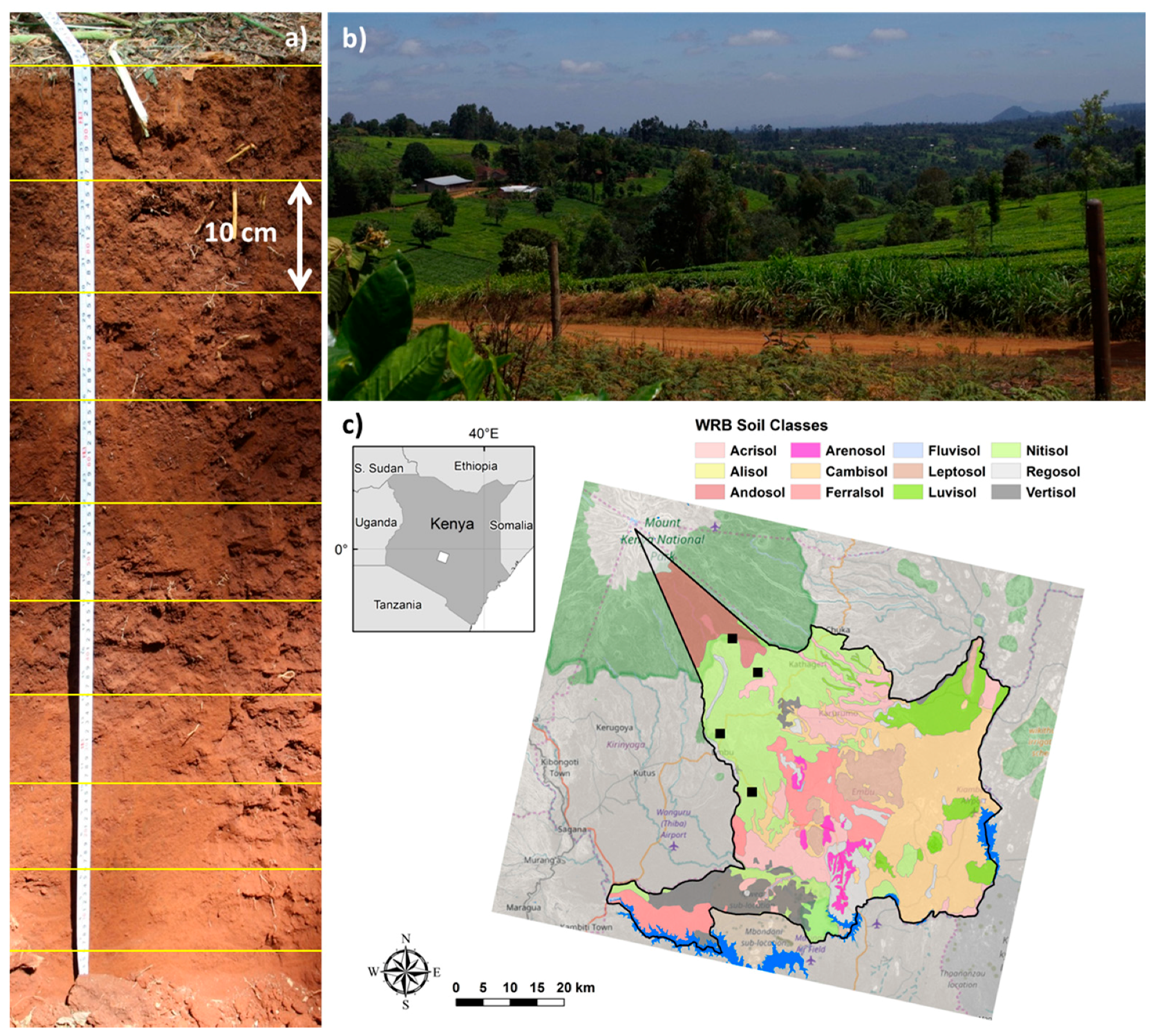
2. Materials & Methods
The Study Area
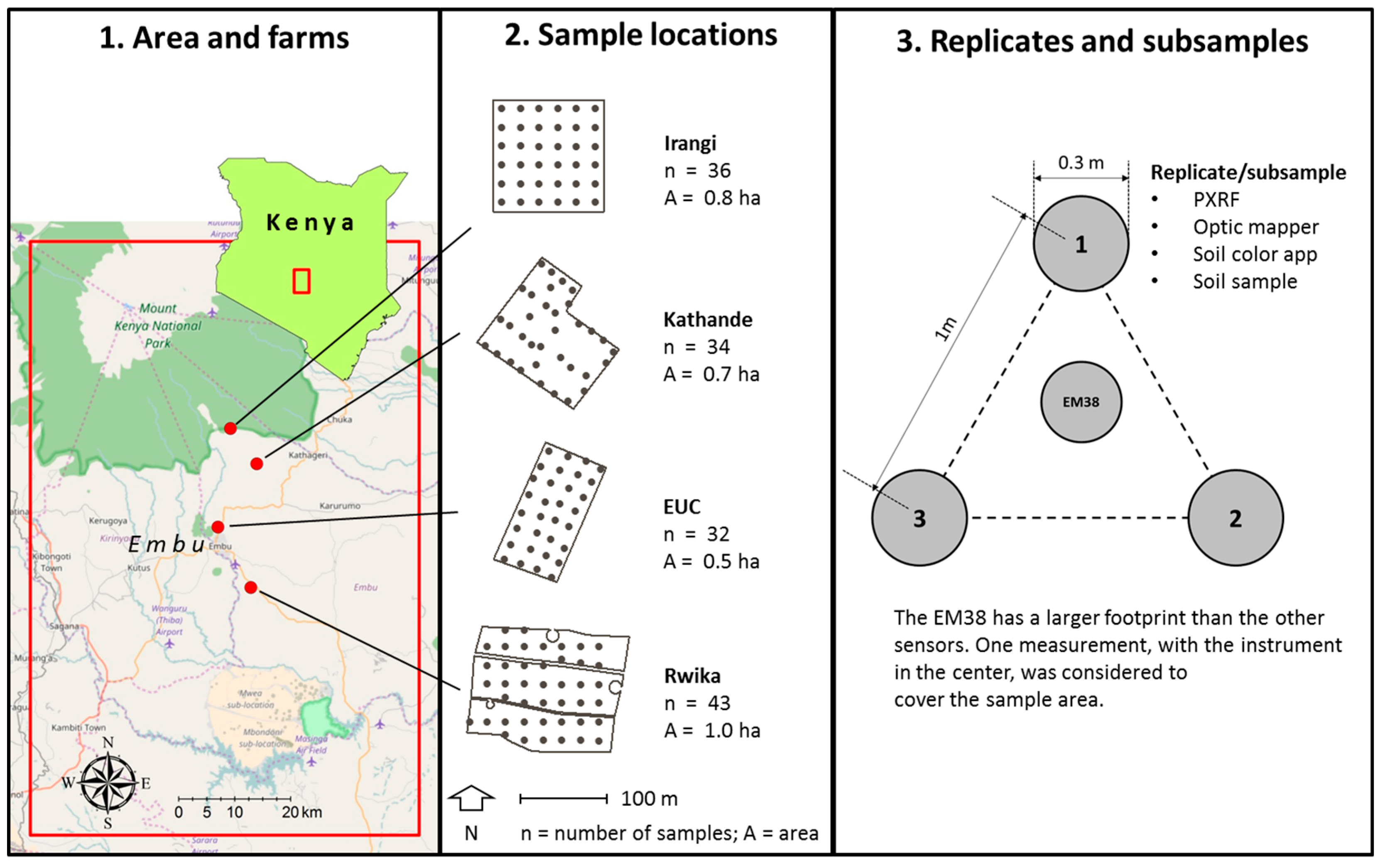
3. Sensors and Sampling Design
4. Field Measurements, Sampling, and Lab Analyses
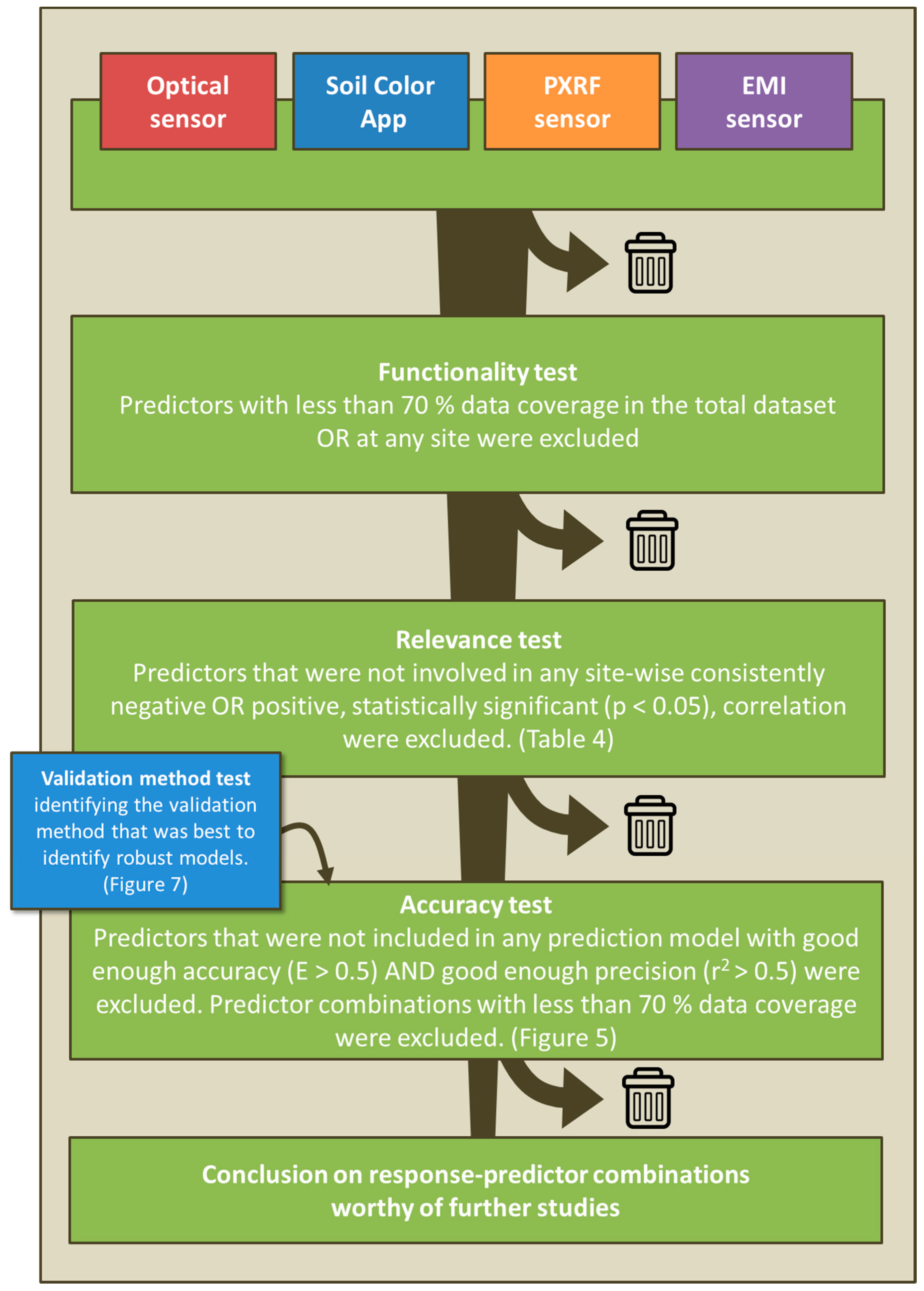
4.1. Screening Procedure
4.2. Functionality Screening
4.3. Relevance Screening
4.4. Validation Strategy
4.5. Accuracy Screening
4.6. Daktari-wa-Udongo
5. Results
5.1. Soil Properties
5.2. Screening Results
5.2.1. Functionality Screening
5.2.2. Relevance Screening
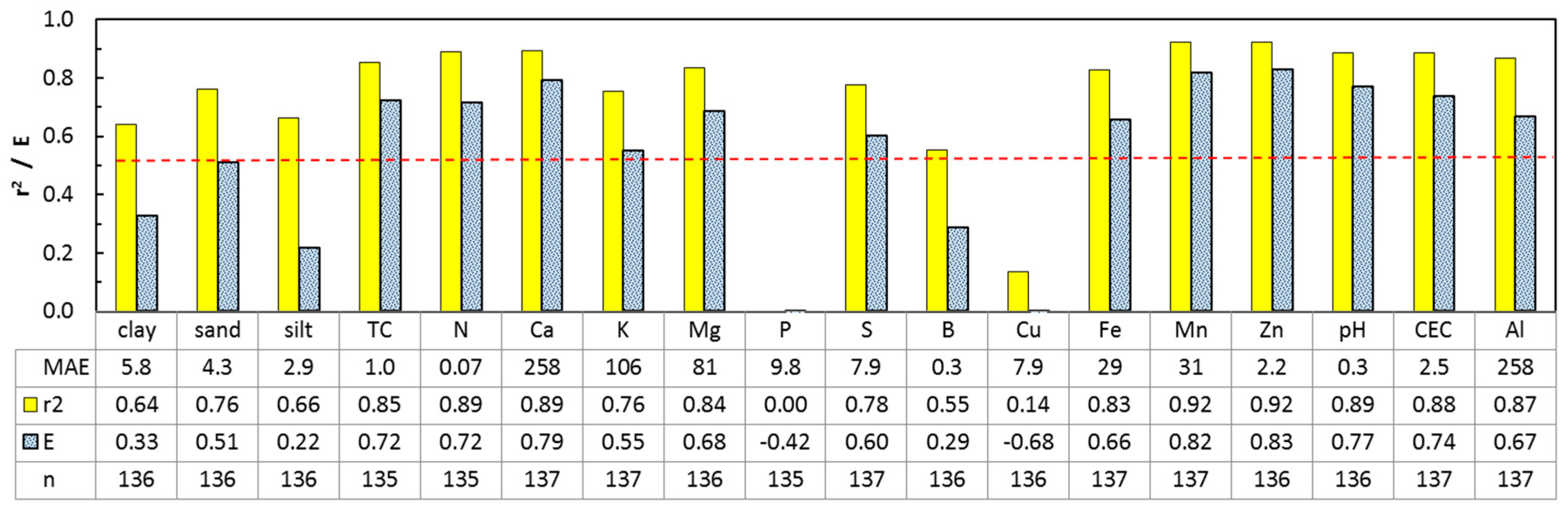
5.2.3. Accuracy Screening
5.3. Comparison of Validation Methods
5.4. Spatial Variation Structure in Soil Properties and Soil Test-Based Advice
6. Discussion
6.1. Three Conditions for a Working Prediction Model
- Be accurate
- Be applicable in larger areas, e.g., a county (spatially robust)
- Be consistent over time (temporally robust)
6.2. Geochemical Relevance of Prediction Models
6.3. Soil Texture Could Not Be Modeled with Any Satisfying Accuracy
6.4. The EMI Sensor Is Good for Mapping of General Variation Patterns
6.5. Spatial Variation of Management Advice
7. Conclusions
- The sensor-based models for N, K, Mg, Ca, S, Zn, Mn, Fe, TC, and CEC passed all the screening steps. In further tests, it is important to investigate the consistency of calibrations over time, since that has not yet been done. The PXRF and the optical sensor were the two sensors that were most often included in the functional, accurate, and robust models. Data from the soil color app proved useful in a few prediction models, while data from the EMI sensor were not included in any of the models passing the screening thresholds. We suggest that this instrument is best used for mapping general variation patterns, rather than predicting absolute values.
- The leave-one-site-out validation method could identify spatially robust models, but the random three-fold validation could not.
- We investigated how the variation in soil properties within and between sites translated to management advice given to farmers. This exercise revealed considerable variation in recommended management both within individual fields and within the region. We suggest using a combination of regional soil maps and local measurements to optimize management of small farms and thereby potentially increase yields. Management zones may be worth considering in heterogeneous fields.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seybold, C.A.; Mausbach, M.J.; Karlen, D.L.; Rogers, H.H. Quantification of soil quality. In Soil Processes and the Carbon Cycle; Lal, R., Kimble, J.M., Follett, R.F., Stewart, B.A., Eds.; CRC Press: Boca Raton, FL, USA, 1998; pp. 387–404. [Google Scholar]
- Hengl, T.; Heuvelink, G.B.; Kempen, B.; Leenaars, J.G.; Walsh, M.G.; Shepherd, K.D.; Sila, A.; MacMillan, R.A.; de Jesus, J.M.; Tamene, L.; et al. Mapping soil properties of Africa at 250 m resolution: Random forests significantly improve current predictions. PLoS ONE 2015, 10, e0125814. [Google Scholar] [CrossRef] [PubMed]
- Vågen, T.G.; Winowiecki, L.A.; Tondoh, J.E.; Desta, L.T.; Gumbricht, T. Mapping of soil properties and land degradation risk in Africa using MODIS reflectance. Geoderma 2016, 263, 216–225. [Google Scholar] [CrossRef]
- Söderström, M.; Piikki, K.; Cordingley, J. Improved usefulness of continental soil databases for agricultural management through local adaptation. S. Afr. J. Plant. Soil 2016, 1–11. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.; Adamchuk, V.I.; Sudduth, K.A.; McKenzie, N.J.; Lobsey, C. Proximal soil sensing: An effective approach for soil measurements in space and time. Adv. Agron. 2011, 113, 237–282. [Google Scholar]
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. On-the-go soil sensors for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef]
- Sudduth, K.A.; Kitchen, N.R.; Wiebold, W.J.; Batchelor, W.D.; Bollero, G.A.; Bullock, D.G.; Clay, D.E.; Palm, H.L.; Pierce, F.J.; Schuler, R.T.; et al. Relating apparent electrical conductivity to soil properties across the north-central USA. Comput. Electron. Agric. 2005, 46, 263–283. [Google Scholar] [CrossRef]
- Sharma, A.; Weindorf, D.C.; Man, T.; Aldabaa, A.A.A.; Chakraborty, S. Characterizing soils via portable X-ray fluorescence spectrometer: 3. Soil reaction (pH). Geoderma 2014, 232, 141–147. [Google Scholar] [CrossRef]
- Sharma, A.; Weindorf, D.C.; Wang, D.; Chakraborty, S. Characterizing soils via portable X-ray fluorescence spectrometer: 4. Cation exchange capacity (CEC). Geoderma 2015, 239, 130–134. [Google Scholar] [CrossRef]
- Zhu, Y.; Weindorf, D.C.; Zhang, W. Characterizing soils using a portable X-ray fluorescence spectrometer: 1. Soil texture. Geoderma 2011, 167, 167–177. [Google Scholar] [CrossRef]
- Jung, A.; Vohland, M.; Thiele-Bruhn, S. Use of a Portable Camera for Proximal Soil Sensing with Hyperspectral Image Data. Remote Sens. 2015, 7, 11434–11448. [Google Scholar] [CrossRef]
- Aitkenhead, M.J.; Donnelly, D.; Sutherland, L.; Miller, D.G.; Coull, M.C.; Black, H.I.J. Predicting Scottish topsoil organic matter content from colour and environmental factors. Eur. J. Soil Sci. 2015, 66, 112–120. [Google Scholar] [CrossRef]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2014. In International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; World Soil Resources Reports No. 106; FAO: Rome, Italy, 2014. [Google Scholar]
- Batjes, N.H. Soil property estimates for the Upper Tana River Catchment, Kenya, Derived from SOTER and WISE; Report 2010/07b; ISRIC—World Soil Information: Wageningen, The Netherlands, 2010; Available online: http://www.isric.org/isric/webdocs/docs/ISRIC_Report_2010_07b.pdf (accessed on 19 August 2016).
- Corwin, D.L.; Lesch, S.M. Application of soil electrical conductivity to precision agriculture. Agric. J. 2003, 95, 455–471. [Google Scholar] [CrossRef]
- Söderström, M.; Eriksson, J.; Isendahl, C.; Schaan, D.P.; Stenborg, P.; Rebellato, L.; Piikki, K. Sensor mapping of Amazonian Dark Earths in deforested croplands. Geoderma 2016, 281, 58–68. [Google Scholar] [CrossRef]
- Kweon, G.; Lund, E.; Maxton, C. Soil organic matter and cation-exchange capacity sensing with on-the-go electrical conductivity and optical sensors. Geoderma 2013, 199, 80–89. [Google Scholar] [CrossRef]
- Potts, P.J.; West, M. Portable X-ray Fluorescence Spectrometry: Capabilities for In Situ Analysis; Royal Society of Chemistry: Cambrigde, UK, 2008. [Google Scholar]
- Weindorf, D.C.; Zhu, Y.; Chakraborty, S.; Bakr, N.; Huang, B. Use of portable X-ray fluorescence spectrometry for environmental quality assessment of peri-urban agriculture. Environ. Monit. Assess. 2012, 184, 217–227. [Google Scholar] [CrossRef] [PubMed]
- Herrick, J.E.; Beh, A.; Barrios, E.; Bouvier, I.; Coetzee, M.; Dent, D.; Elias, E.; Hengl, T.; Karl, J.W.; Liniger, H.; et al. The Land-Potential Knowledge System (LandPKS): Mobile apps and collaboration for optimizing climate change investments. Ecosyst. Health Sustain. 2016, 2, 1–7. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Minasny, B.; Roudier, P.; McBratney, A.B. Colour space models for soil science. Geoderma 2006, 133, 320–337. [Google Scholar] [CrossRef]
- Mehlich, A. Mehlich-3 soil test extractant: A modification of Mehlich-2 extractant. Commun. Soil Sci. Plant. Anal. 1984, 15, 1409–1416. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning, 2nd ed.; Springer-Verlag: New York, NY, USA, 2009. [Google Scholar]
- Legates, D.R.; McCabe, G.J. Evaluating the use of “goodness-of-fit” measures in hydrologic and hydroclimatic model validation. Water Resour. Res. 1999, 35, 233–241. [Google Scholar] [CrossRef]
- Milborrow, M.S. Notes of the Earth Package. Available online: www.milbo.org/doc/earth-notes.pdf (accessed on 12 February 2016).
- R Core Team. A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria. Available online: http://www.R-project.org/ (accessed on 12 February 2016).
- Brus, D.J.; Kempen, B.; Heuvelink, G.B.M. Sampling for validation of digital soil maps. Eur. J. Soil Sci. 2011, 62, 394–407. [Google Scholar] [CrossRef]
- Odgers, N.P.; McBratney, A.B.; Minasny, B. Digital soil property mapping and uncertainty estimation using soil class probability rasters. Geoderma 2015, 237, 190–198. [Google Scholar] [CrossRef]
- Gebbers, R.; De Bruin, S. Application of Geostatistical Simulation in Precision Agriculture. In Geostatistical Applications for Precision Agriculture; Oliver, M.A., Ed.; Springer: Berlin, Germany, 2010; pp. 269–304. [Google Scholar]
- Konen, M.E.; Burras, C.L.; Sandor, J.A. Organic carbon, texture, and quantitative color measurement relationships for cultivated soils in north central Iowa. Soil Sci. Soc. Am. J. 2003, 67, 1823–1830. [Google Scholar] [CrossRef]
- Schnug, E.; Haneklaus, S. A rapid method for the indirect determination of the clay content by X-ray fluorescence spectroscopic analysis of rubidium in soils. Commun. Soil Sci. Plant. Anal. 1996, 27, 1707–1719. [Google Scholar] [CrossRef]
- Piikki, K.; Söderström, M.; Stenberg, B. Sensor data fusion for topsoil clay mapping. Geoderma 2013, 199, 106–116. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M. Delineating site-specific management units with proximal sensors. In Geostatistical Applications for Precision Agriculture; Oliver, M.A., Ed.; Springer: Berlin, Germany, 2010; pp. 139–165. [Google Scholar]
- Heege, H.J. Precision in Crop Farming; Springer Science + Business Media: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Stoorvogel, J.J.; Kooistra, L.; Bouma, J. Managing soil variability at different spatial scales as a basis for precision agriculture. In Soil-Specific Farming: Precision Agriculture; Lal, R., Stewart, B.A., Eds.; CRC Press (Advances in Soil Science): Boca Raton, FL, USA, 2015; pp. 37–72. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Irangi n = 36 | Kathande n = 34 | EUC n = 32 | Rwika n = 43 |
|---|---|---|---|---|
| Texture | ||||
| clay [%] | 38 ± 5 | 42 ± 6 | 59 ± 5 | 39 ± 3 |
| silt [%] | 19 ± 2 | 17 ± 2 | 20 ± 3 | 27 ± 4 |
| sand [%] | 43 ± 5 | 40 ± 5 | 21 ± 4 | 35 ± 2 |
| Organic Matter | ||||
| TC [%] | 7.7 ± 1.3 | 5.8 ± 1.4 | 3.4 ± 0.7 | 2.2 ± 0.3 |
| N [%] | 0.6 ± 0.1 | 0.5 ± 0.1 | 0.3 ± 0.1 | 0.2 ± 0.0 |
| Easily Soluble Macronutrients | ||||
| Ca [mg·kg−1] | 59 ± 31 | 320 ± 150 | 1740 ± 675 | 1134 ± 384 |
| K [mg·kg−1] | 139 ± 45 | 158 ± 97 | 443 ± 217 | 528 ± 148 |
| Mg [mg·kg−1] | 26 ± 9 | 40 ± 17 | 342 ± 98 | 426 ± 91 |
| P [mg·kg−1] | 5 ± 2 | 21 ± 19 | 14 ± 9 | 3 ± 1 |
| S [mg·kg−1] | 38 ± 6 | 46 ± 15 | 12 ± 7 | 13 ± 5 |
| Easily Soluble Micronutrients | ||||
| B [mg·kg−1] | 0.5 ± 0.1 | 0.6 ± 0.8 | 1.3 ± 0.6 | 0.8 ± 0.3 |
| Cu [mg·kg−1] | 0.4 ± 0.1 | 14.4 ± 16 | 0.9 ± 1.4 | 1.1 ± 0.2 |
| Fe [mg·kg−1] | 151 ± 29 | 204 ± 55 | 76 ± 11 | 56 ± 11 |
| Mn [mg·kg−1] | 20 ± 8 | 32 ± 15 | 286 ± 33 | 175 ± 38 |
| Zn [mg·kg−1] | 2 ± 2 | 2 ± 2 | 17 ± 9 | 2 ± 1 |
| Other | ||||
| pH | 4.6 ± 0.2 | 4.2 ± 0.3 | 5.7 ± 0.5 | 6.1 ± 0.4 |
| CEC [cmolc·kg−1] | 2.6 ± 0.8 | 7.8 ± 2.9 | 18.2 ± 3.8 | 13.2 ± 2.4 |
| CEC-clay [cmolc·kg−1] | 4.1/3.4 | 3.7/1.9 | 11.6/16.7 | 7.4/5.6 |
| Exch. Al [g·kg−1] | 2.4 ± 0.1 | 2.0 ± 0.1 | 1.4 ± 0.2 | 1.2 ± 0.1 |
| Clay | Sand | Silt | TC | TN | Ca | K | Mg | P | S | B | Cu | Fe | Mn | Zn | pH | CEC | Al | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| clay | --- | |||||||||||||||||
| sand | +3 | --- | ||||||||||||||||
| silt | +4 | 0 | --- | |||||||||||||||
| TC | +2 | +2 | +3 | --- | ||||||||||||||
| TN | +1 | +1 | +3 | +4 | --- | |||||||||||||
| Ca | +2 | +3 | +1 | +1 | 0 | --- | ||||||||||||
| K | +1 | +1 | −1 | +1 | +1 | +1 | --- | |||||||||||
| Mg | +1 | 0 | +2 | ±2 | +2 | 0 | +2 | --- | ||||||||||
| P | +2 | +4 | +1 | ±2 | +2 | +2 | +1 | +1 | --- | |||||||||
| S | +2 | +1 | +3 | +2 | +2 | 0 | +1 | +2 | 0 | --- | ||||||||
| B | +1 | +1 | 0 | 0 | +3 | +2 | +1 | 0 | 0 | +1 | --- | |||||||
| Cu | -4 | -2 | −2 | ±2 | −1 | −1 | −1 | −1 | 0 | −1 | 0 | --- | ||||||
| Fe | +2 | +2 | 0 | −1 | −1 | +1 | +1 | 0 | +1 | 0 | 0 | -3 | --- | |||||
| Mn | +2 | 0 | +2 | +1 | +2 | −1 | 0 | +1 | 0 | +1 | 0 | -4 | −1 | --- | ||||
| Zn | +4 | +3 | +4 | +2 | +1 | +2 | +1 | +1 | +3 | +2 | 0 | -4 | +2 | +2 | --- | |||
| pH | ±3 | ±3 | +2 | ±4 | +3 | −2 | +1 | +1 | −2 | +2 | +2 | ±2 | −1 | +1 | ±3 | --- | ||
| CEC | +4 | +3 | +4 | +4 | +4 | 0 | +1 | +3 | +1 | +2 | +2 | -2 | 0 | +2 | +4 | ±3 | --- | |
| Al | ±2 | +1 | −2 | −2 | −2 | +1 | 0 | −1 | +1 | −2 | 0 | ±4 | +3 | −1 | ±2 | −2 | −2 | --- |
| Laboratory Analysis | Optic Sensor | Color app | PXRF | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R | IR | R Field | R lab | Cr | Fe | K | Mn | Pb | Rb | Sr | Ti | Zn | Zr | |
| Texture | ||||||||||||||
| clay | 0 | −1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | +1 | 0 | 0 | 0 |
| sand | 0 | +1 | −1 | 0 | +2 | −1 | 0 | 0 | ± | −1 | −1 | 0 | ± | −1 |
| silt | −1 | −1 | +1 | 0 | 0 | −1 | 0 | −1 | 0 | 0 | 0 | 0 | 0 | ± |
| Organic Matter | ||||||||||||||
| TC | −2 | +1 | −1 | ± | −3 | −3 | +1 | ± | −2 | −2 | ± | −3 | −2 | −3 |
| TN | −1 | +1 | −1 | ± | −3 | −3 | +1 | ± | −2 | −2 | ± | −2 | −2 | −3 |
| Easily Soluble Macronutrients | ||||||||||||||
| Ca | −2 | −1 | −1 | −1 | 0 | 0 | +3 | +1 | 0 | +1 | +2 | 0 | 0 | 0 |
| K | −1 | 0 | −2 | −2 | −2 | −3 | +3 | ± | −1 | 0 | +1 | −1 | −1 | −3 |
| Mg | −2 | −2 | −1 | −2 | −2 | −1 | +1 | ± | −2 | ± | +2 | −3 | −2 | −1 |
| P | 0 | +1 | 0 | ± | −2 | −2 | ± | −2 | −2 | −2 | ± | −1 | −2 | −2 |
| S | 0 | +1 | 0 | 0 | −1 | −2 | −1 | −1 | −1 | −1 | ± | −1 | −1 | −2 |
| Easily Soluble Micronutrients | ||||||||||||||
| B | −2 | −2 | −1 | −1 | −1 | −1 | 0 | ± | −1 | 0 | +3 | −2 | 0 | −2 |
| Cu | +1 | −1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | +1 | 0 | 0 | 0 |
| Fe | 0 | +1 | −2 | −2 | ± | −2 | ± | −2 | −3 | −2 | +1 | −2 | -2 | −3 |
| Mn | +1 | +1 | −1 | −1 | +1 | 0 | +1 | +3 | +1 | 0 | +2 | 0 | +1 | 0 |
| Zn | −1 | 0 | 0 | −1 | 0 | 0 | 0 | 0 | +1 | 0 | +1 | 0 | +2 | 0 |
| Other | ||||||||||||||
| pH | 0 | −2 | −1 | −1 | +1 | +1 | +3 | +3 | +1 | +2 | ± | +1 | +2 | +1 |
| CEC | −2 | −1 | −1 | −2 | −1 | −3 | +2 | ± | −1 | −1 | +2 | −3 | −1 | −3 |
| Exch. Al | +1 | +2 | 0 | 0 | 0 | −2 | 0 | −1 | −1 | 0 | −2 | 0 | −1 | −2 |
| Laboratory Analysis | Optic Sensor | Color app | PXRF | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R | IR | R/IR | R Field | R lab | Cr | Fe | K | Mn | Pb | Rb | Sr | Ti | Zn | Zr | |
| Texture | |||||||||||||||
| clay | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| sand | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| silt | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Organic Matter | |||||||||||||||
| TC | 1 * | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 * | 1 | 0 | 1 * |
| TN | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 * | 0 | 1 | 1* | 1 | 1 | 0 | 1 * |
| Easily Soluble Macronutrients | |||||||||||||||
| Ca | 1 * | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 * | 0 | 0 | 1 |
| K | 1 * | 0 | 1 | 1 | 0 | 1 | 1 * | 1 * | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| Mg | 1 | 0 | 1 * | 1 | 1 | 0 | 0 | 1 * | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| P | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| S | 1 | 0 | 1 * | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| Easily Soluble Micronutrients | |||||||||||||||
| B | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Cu | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Fe | 1 * | 1 * | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| Mn | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 1 * | 0 | 1 * | 1 |
| Zn | 1 * | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 * | 0 | 1 * | 0 |
| Other | |||||||||||||||
| pH | 1 * | 1 | 1 * | 1 | 0 | 1 | 0 | 1 * | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| CEC | 0 | 0 | 1 * | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 * | 0 | 0 | 0 |
| Exch. Al | 0 | 0 | 0 | 1 | 0 | 0 | 1 * | 0 | 1 | 0 | 1 * | 1 * | 1 | 1 | 1 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piikki, K.; Söderström, M.; Eriksson, J.; Muturi John, J.; Ireri Muthee, P.; Wetterlind, J.; Lund, E. Performance Evaluation of Proximal Sensors for Soil Assessment in Smallholder Farms in Embu County, Kenya. Sensors 2016, 16, 1950. https://doi.org/10.3390/s16111950
Piikki K, Söderström M, Eriksson J, Muturi John J, Ireri Muthee P, Wetterlind J, Lund E. Performance Evaluation of Proximal Sensors for Soil Assessment in Smallholder Farms in Embu County, Kenya. Sensors. 2016; 16(11):1950. https://doi.org/10.3390/s16111950
Chicago/Turabian StylePiikki, Kristin, Mats Söderström, Jan Eriksson, Jamleck Muturi John, Patrick Ireri Muthee, Johanna Wetterlind, and Eric Lund. 2016. "Performance Evaluation of Proximal Sensors for Soil Assessment in Smallholder Farms in Embu County, Kenya" Sensors 16, no. 11: 1950. https://doi.org/10.3390/s16111950
APA StylePiikki, K., Söderström, M., Eriksson, J., Muturi John, J., Ireri Muthee, P., Wetterlind, J., & Lund, E. (2016). Performance Evaluation of Proximal Sensors for Soil Assessment in Smallholder Farms in Embu County, Kenya. Sensors, 16(11), 1950. https://doi.org/10.3390/s16111950