
Localization of CO2 Leakage from a Circular Hole on a Flat-Surface Structure Using a Circular Acoustic Emission Sensor Array


Abstract
:1. Introduction
2. Methodology
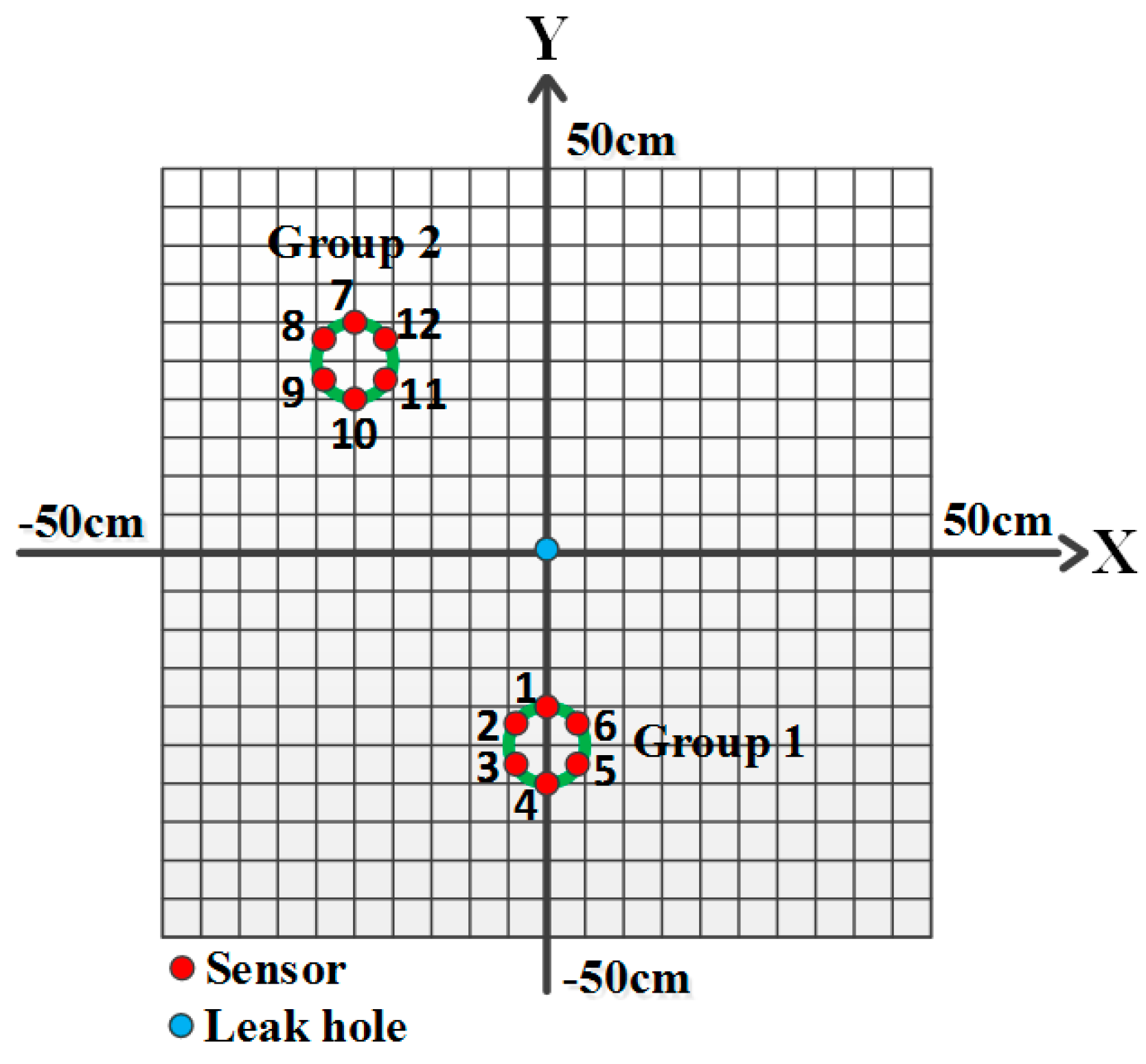
2.1. Sensing Arrangement
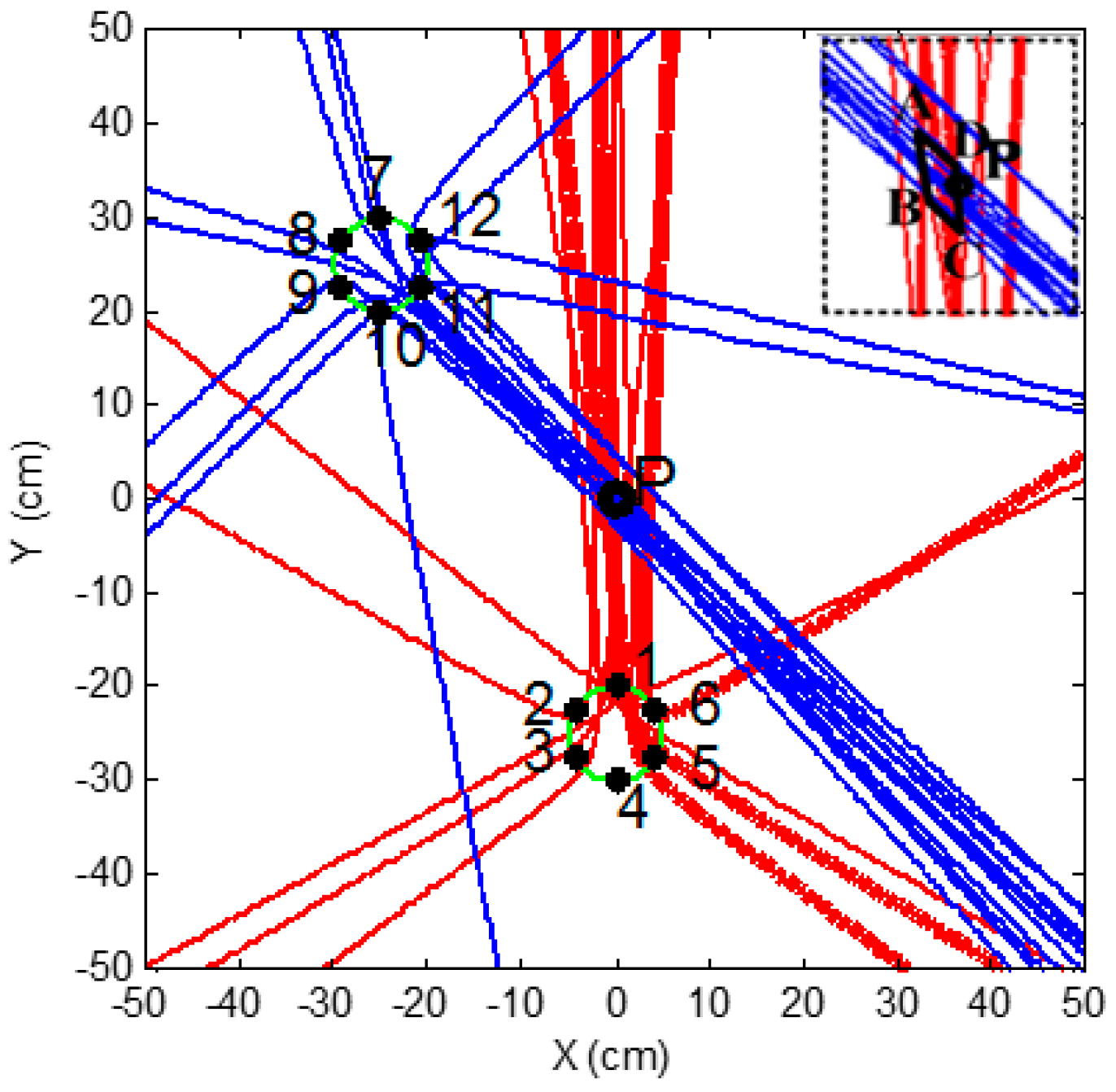
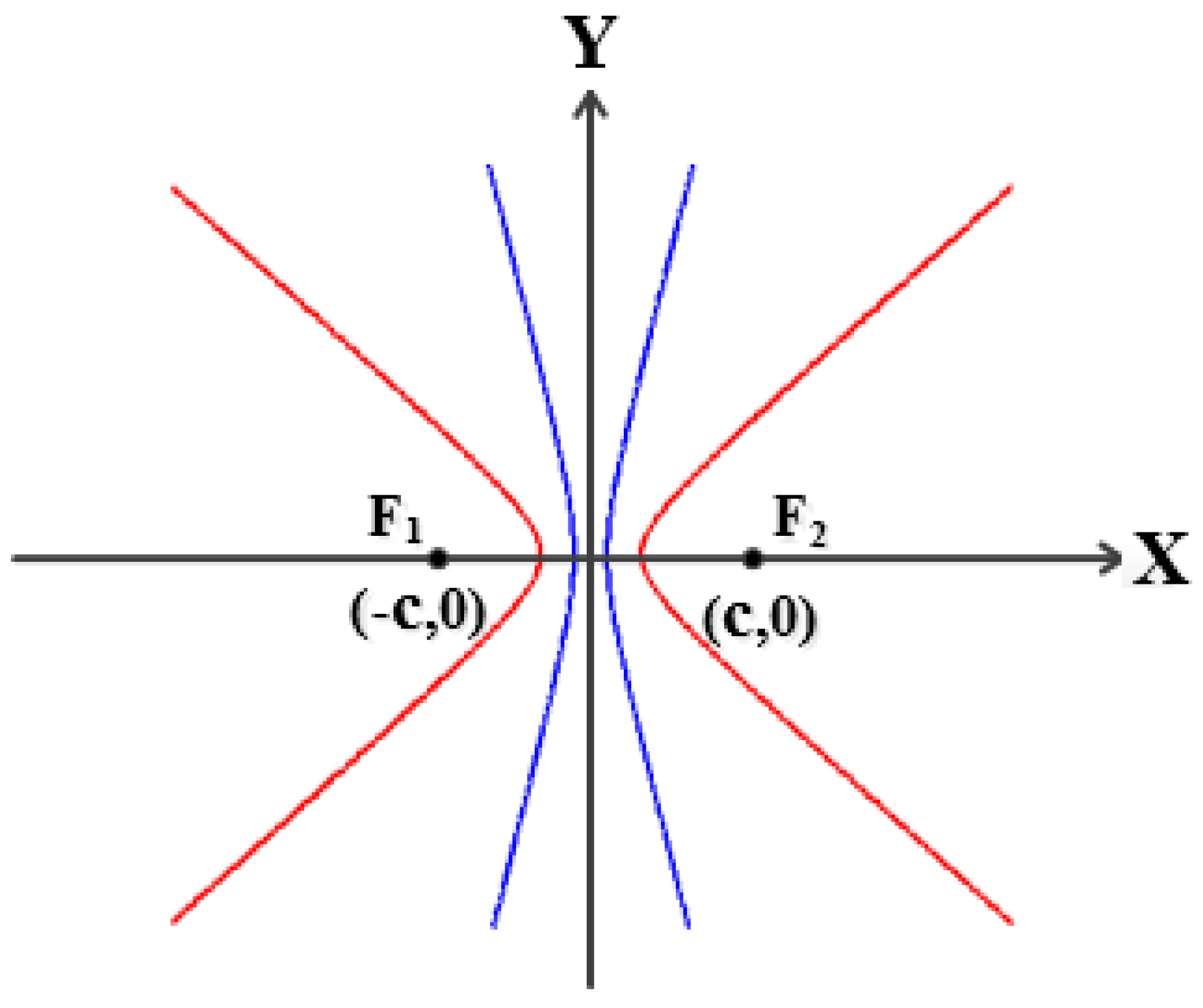
2.2. Leak Localization Principle
2.3. Ensemble Empirical Mode Decomposition
- (1)
- Add a Gaussian white noise signal ω(t) to the original signal x(t) to obtain a synthesized signal X(t).
- (2)
- (3)
- Repeat Steps (1) and (2) N times, but add different white Gaussian noise each time:The residue of added white noise should satisfy the following statistical rule [21]:where N is the number of calculations, ε the root mean square (RMS) amplitude of the added noise, and εn is the difference between the original data and the reconstructed data.
- (4)
- Compute the ensemble means of corresponding IMFs as the final result:
2.4. Cross-Correlation
3. Experimental Results and Discussion
3.1. Experimental Setup
3.2. Characteristics of the AE Leak Signal
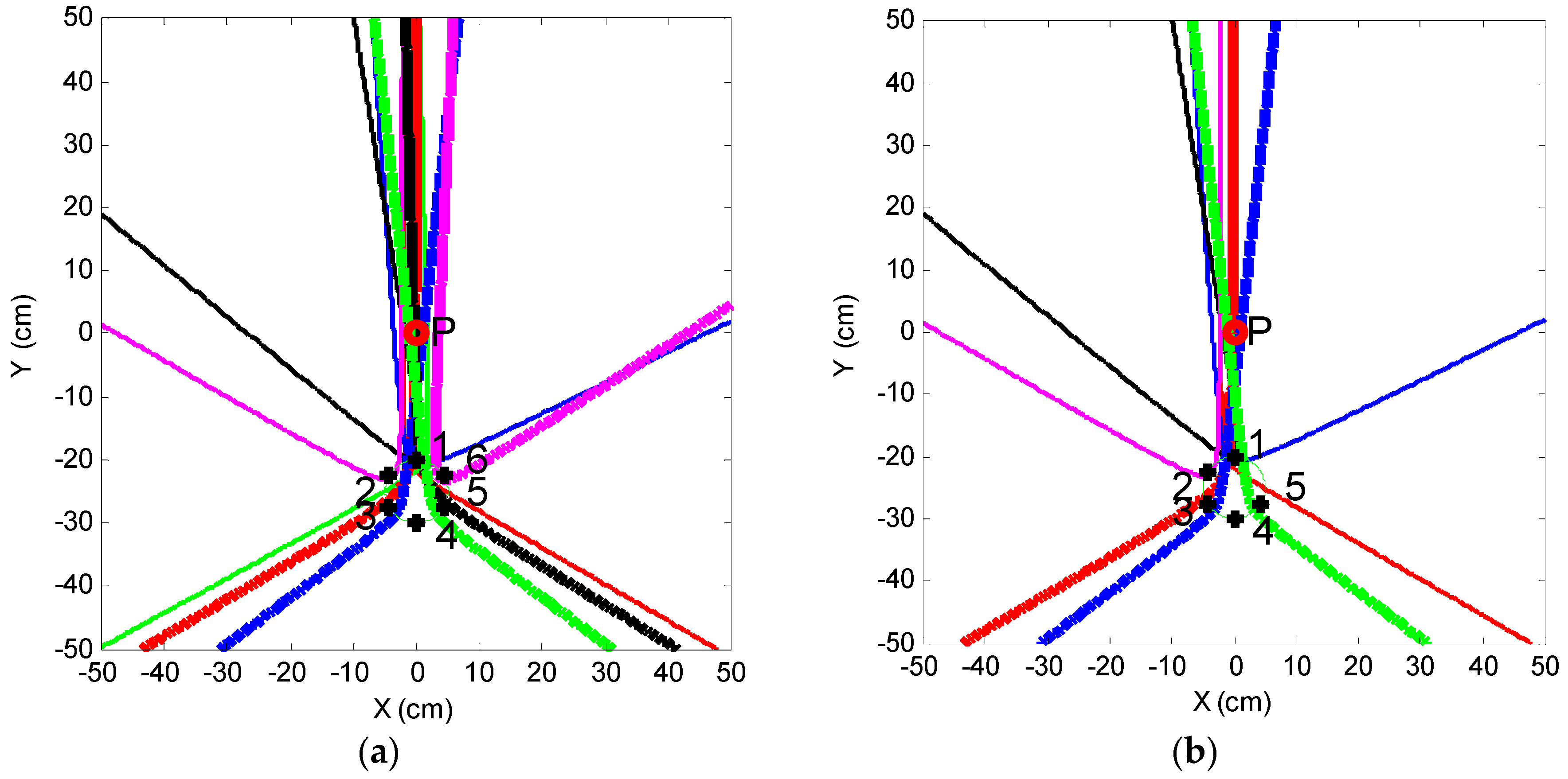
3.3. Leak Localization Results and Error Analysis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gale, J.; Davison, J. Transmission of CO2 safety and economic considerations. Energy 2004, 29, 1319–1328. [Google Scholar] [CrossRef]
- Yang, H.; Qin, Y.; Feng, G.; Ci, H. Online monitoring of geological storage and leakage based on wireless sensor networks. IEEE Sens. J. 2013, 13, 556–562. [Google Scholar] [CrossRef]
- Knoope, M.J.; Ramírez, A.; Faaij, A.P. A state-of-the-art review of techno-economic models predicting the costs of CO2 pipeline transport. Int. J. Greenh. Gas Control 2013, 16, 241–270. [Google Scholar] [CrossRef]
- Cui, X.; Yan, Y.; Ma, Y.; Ma, L.; Han, X. Localization of CO2 leakage from transportation pipelines through low frequency acoustic emission detection. Sens. Actuators A Phys. 2016, 237, 107–118. [Google Scholar] [CrossRef]
- Adefila, K.; Yan, Y.; Wang, T. Leakage detection of gaseous CO2 through thermal imaging. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference, Pisa, Italy, 11–14 May 2015; pp. 261–265.
- Mostafapour, A.; Davoodi, S. Leakage locating in underground high pressure gas pipe by acoustic emission method. J. Nondestruct. Eval. 2013, 32, 113–123. [Google Scholar] [CrossRef]
- Adefila, K.; Yan, Y. A compendium of CO2 leakage detection and monitoring techniques in carbon capture and storage (CCS) pipelines. In Proceedings of the International Conference on Computer as a Tool, Zagreb, Croatia, 1–4 July 2013; pp. 1328–1335.
- Murvay, P.S.; Silea, I. A survey on gas leak detection and localization techniques. J. Loss Prev. Process Ind. 2012, 25, 966–973. [Google Scholar] [CrossRef]
- Yoo, B.; Purekar, A.S.; Zhang, Y.; Pines, D.J. Piezoelectric-paint-based two-dimensional phased sensor arrays for structural health monitoring of thin panels. Smart Mater. Struct. 2010, 19, 075017. [Google Scholar] [CrossRef]
- McLaskey, G.C.; Glaser, S.D.; Grosse, C.U. Beamforming array techniques for acoustic emission monitoring of large concrete structures. J. Sound Vib. 2010, 329, 2384–2394. [Google Scholar]
- Niri, E.D.; Salamone, S. A probabilistic framework for acoustic emission source localization in plate-like structures. Smart Mater. Struct. 2012, 21, 035009. [Google Scholar] [CrossRef]
- Gangadharan, R.; Prasanna, G.; Bhat, M.R.; Murthy, C.R. Acoustic emission source location and damage detection in a metallic structure using a graph-theory-based geodesic approach. Smart Mater. Struct. 2009, 18, 115022. [Google Scholar] [CrossRef]
- Niri, E.D.; Farhidzadeh, A.; Salamone, S. Nonlinear Kalman Filtering for acoustic emission source localization in anisotropic panels. Ultrasonics 2014, 54, 486–501. [Google Scholar] [CrossRef] [PubMed]
- Sedlak, P.; Hirose, Y.; Enoki, M. Acoustic emission localization in thin multi-layer plates using first-arrival determination. Mech. Syst. Signal Process. 2013, 36, 636–649. [Google Scholar] [CrossRef]
- Bian, X.; Zhang, Y.; Li, Y.; Gong, X.; Jin, S. A new method of using sensor arrays for gas leakage location based on correlation of the time-space domain of continuous ultrasound. Sensors 2015, 15, 8266–8283. [Google Scholar] [CrossRef] [PubMed]
- Bian, X.; Li, Y.; Feng, H.; Wang, J.; Qi, L.; Jin, S. A Location Method Using Sensor Arrays for Continuous Gas Leakage in Integrally Stiffened Plates Based on the Acoustic Characteristics of the Stiffener. Sensors 2015, 15, 24644–24661. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Wen, G.; Jiang, C. EEMD Independent Extraction for Mixing Features of Rotating Machinery Reconstructed in Phase Space. Sensors 2015, 15, 8550–8569. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wu, D.; Chen, J.; Ghoniem, A.; Hossain, M.A. A Triaxial Accelerometer-Based Human Activity Recognition via EEMD-Based Features and Game-Theory-Based Feature Selection. IEEE Sens. J. 2016, 16, 3198–3207. [Google Scholar] [CrossRef]
- Guo, W.; Peter, W.T. A novel signal compression method based on optimal ensemble empirical mode decomposition for bearing vibration signals. J. Sound Vib. 2013, 332, 423–441. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E.; Chen, X. The multi-dimensional ensemble empirical mode decomposition method. Adv. Adapt. Data Anal. 2009, 1, 339–372. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Qian, X.; Yan, Y. Flow measurement of biomass and blended biomass fuels in pneumatic conveying pipelines using electrostatic sensor-arrays. IEEE Trans. Instrum. Meas. 2012, 61, 1343–1352. [Google Scholar] [CrossRef]
- Almeida, V.A.; Baptista, F.G.; Aguiar, P.R. Piezoelectric transducers assessed by the pencil lead break for impedance-based structural health monitoring. IEEE Sens. J. 2015, 15, 693–705. [Google Scholar] [CrossRef]
- Fonollosa, J.; Vergara, A.; Huerta, R. Algorithmic mitigation of sensor failure: Is sensor replacement really necessary? Sens. Actuators B Chem. 2013, 183, 211–221. [Google Scholar] [CrossRef]
- Martinelli, E.; Magna, G.; Vergara, A.; Natale, C.D. Cooperative classifiers for reconfigurable sensor arrays. Sens. Actuators B Chem. 2014, 199, 83–92. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Material | Piezoelectric ceramic |
| Diameter | 18.8 mm |
| Height | 15 mm |
| Operating temperature | −20–200 °C |
| Operating frequency range | 50–400 kHz |
| Actual Distance between Two Sensors F1F2 (cm) | Measured Distance Difference |PF1 − PF2| (cm) | Actual Distance Difference (cm) | Absolute Error (cm) | |
|---|---|---|---|---|
| 1 & 2 | 5.0 | 2.5 | 2.9 | −0.4 |
| 1 & 3 | 8.7 | 7.2 | 7.8 | −0.6 |
| 1 & 4 | 10.0 | 10.5 | 10.0 | 0.5 |
| 1 & 5 | 8.7 | 8.1 | 7.8 | 0.3 |
| 1 & 6 | 5.0 | 2.6 | 2.9 | −0.3 |
| 2 & 3 | 5.0 | 5.2 | 4.9 | 0.3 |
| 2 & 4 | 8.7 | 7.5 | 7.1 | 0.4 |
| 2 & 5 | 10.0 | 5.0 | 4.9 | 0.1 |
| 2 & 6 | 8.7 | 0.0 | 0.0 | 0.0 |
| 3 & 4 | 5.0 | 2.0 | 2.2 | −0.2 |
| 3 & 5 | 8.7 | 0.0 | 0.0 | 0.0 |
| 3 & 6 | 10.0 | 4.8 | 4.9 | −0.1 |
| 4 & 5 | 5.0 | 2.0 | 2.2 | −0.2 |
| 4 & 6 | 8.7 | 7.7 | 7.1 | 0.6 |
| 5 & 6 | 5.0 | 5.2 | 4.9 | 0.3 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, X.; Yan, Y.; Guo, M.; Han, X.; Hu, Y. Localization of CO2 Leakage from a Circular Hole on a Flat-Surface Structure Using a Circular Acoustic Emission Sensor Array. Sensors 2016, 16, 1951. https://doi.org/10.3390/s16111951
Cui X, Yan Y, Guo M, Han X, Hu Y. Localization of CO2 Leakage from a Circular Hole on a Flat-Surface Structure Using a Circular Acoustic Emission Sensor Array. Sensors. 2016; 16(11):1951. https://doi.org/10.3390/s16111951
Chicago/Turabian StyleCui, Xiwang, Yong Yan, Miao Guo, Xiaojuan Han, and Yonghui Hu. 2016. "Localization of CO2 Leakage from a Circular Hole on a Flat-Surface Structure Using a Circular Acoustic Emission Sensor Array" Sensors 16, no. 11: 1951. https://doi.org/10.3390/s16111951
APA StyleCui, X., Yan, Y., Guo, M., Han, X., & Hu, Y. (2016). Localization of CO2 Leakage from a Circular Hole on a Flat-Surface Structure Using a Circular Acoustic Emission Sensor Array. Sensors, 16(11), 1951. https://doi.org/10.3390/s16111951